
Abstract
Active noise control shows a good performance on the suppression of the low-frequency noise and hence it is widely applied. However, the traditional active noise control systems are unsatisfactory in controlling impulse noise in practical situations. A method based on the convex combination of filtered-x least mean square and filtered-x minimum kernel risk-sensitive loss adaptive algorithms (CFxLM) is presented to efficiently suppress impulse noise. Due to the simplicity of the LMS algorithm, the related filter is selected as the fast filter. Because the minimum kernel risk-sensitive loss algorithm is robust to impulse noise and can offer good convergence performance, we first apply it to the active noise control system and select the corresponding filter as the slow one. The proposed CFxLM algorithm can achieve both fast convergence and good noise reduction and any prior knowledge of reference noise is unnecessary. Extensive simulations demonstrate the superior noise reduction capability of the developed CFxLM-based active noise control system in controlling impulse noise.
Introduction
Active noise control (ANC) plays an increasingly important role in noise reduction (NR). Compared with classical passive noise control (PNC), ANC can effectively suppress low-frequency noise 1 and has been applied in aircraft cockpits, 2 road NR, 3 pipeline NR, 4 and other fields. The single-channel feedforward ANC system depicted in Figure 1(a) includes one reference microphone for collecting the environmental noise (i.e. reference noise) and converting it into an electrical signal, one secondary speaker for producing the anti-noise, one adaptive controller for driving the secondary speaker, and one error microphone for sensing the counteracted noise.
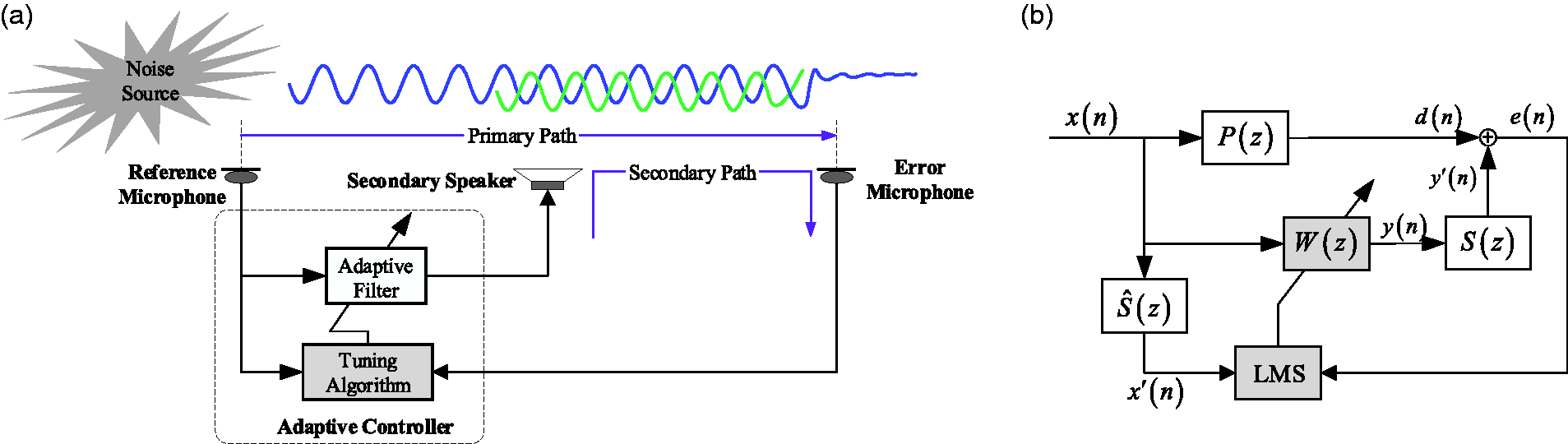
Single-channel ANC system: (a) feedforward ANC system and (b) FxLMS algorithm.
Benefiting from the simplicity and ease of implementation, filtered-x least mean square (FxLMS) algorithm (Figure 1(b)) has been used in many ANC systems.
5
Usually, the reference noise is assumed as a Gaussian noise. However, the acoustical signals in many practical situations exhibit the impulse characteristics, such as equipment noise of pile driver and life-saving device,
6
and many man-made noise.
7
The standard symmetric alpha stable (SαS) distribution is commonly used to model such impulse noise, and its characteristic function is
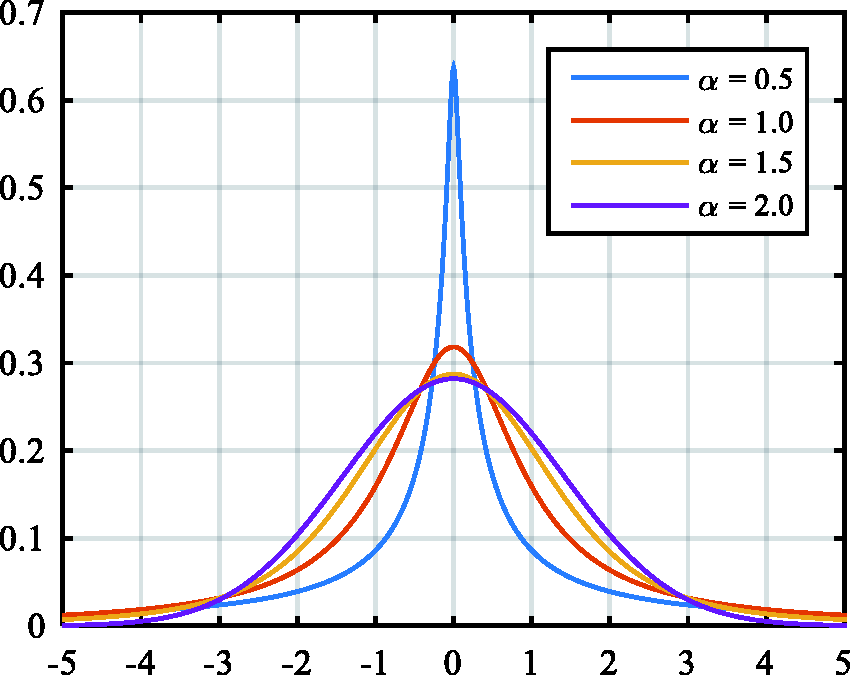
Probability density functions of
Various algorithms have been raised to solve this problem. Leahy et al. 10 raised the filtered-x least mean p-power (FxLMP) algorithm by modifying the cost function as the pth-moment of error, which can suppress the effect of impulse noise. Sun et al. 11 proposed an improved FxLMS algorithm by setting a threshold, so that the large amplitude of reference signal will be ignored. In this way, the instability caused by the impulse noise can be avoided. Akhtar and Mitsuhashi 8 extended the Sun’s method via clipping the large samples of reference and error signal to a pre-defined threshold to improve the robustness of the system. Sun and Akhtar chose the thresholds offline according to the statistical characteristics of noise, which is difficult to achieve in practical applications. To update the threshold online, Bergamasco et al. 12 used a box-plot (BP) algorithm. Wu et al. 9 modified the error in cost function as logarithmic error and raised the filtered-x logarithmic error LMS (FxlogLMS) algorithm. Thanigai and Kuo 13 first applied ANC to medical application and put forward the filtered-x least mean M-estimator (FxLMM) method to control impulse noise.
Step size is an important parameter for the adaptive algorithm. Large step size ensures the system converging quickly, but the steady-state error is unsatisfactory. On the contrary, small step size can provide good steady-state performance but it converges slowly. Therefore, the step size reveals the contradiction between convergence rate and precision. The contradiction severely restricts the effect of the system. Convex combination method proposed by Arenas-Garcia et al. 14 can effectively solve this contradiction by combining two different adaptive filters. The combined filter is not worse than any component filters. 15
It has been shown that the convex combination performs better than the variable step size algorithms. 16 Convex combination has attracted much attention in the field of signal processing 17 and it has been applied to the ANC system.16,18–20 For example, in order to improve NR of a nonlinear ANC (NANC) system, George and Panda 18 proposed a convex combination algorithm (FsuLMS), which comprises a functional link artificial neural network (FLANN) and an adaptive IIR filter; later, he also raised an NANC system based on FLANN and Volterra adaptive filter 19 ; recently, Zhao et al. 20 proposed an algorithm (CNFSLMS) by combining two normalized filtered-s LMS algorithms. Ferrer et al. 16 proposed several convex combination algorithms based on two LMS adaptive filters with different structures for single and multi-channel ANCs. The validity of convex combination has been verified in the above mentioned ANC systems, so we explore a convex combination to the active impulse noise control (AINC) system for the first time in this paper.
With impulse noise, the conventional mean-square error (MSE) criterion is invalid since it only extracts part of the information of the signal. In contrast, the kernel risk-sensitive loss (KRSL) criterion proposed by Chen et al. 21 describes the signals more comprehensively; it extracts higher order statistical information from the impulse noise. The KRSL has excellent convergence performance, and hence its performance surface has the following characteristics 21 : (1) in the vicinity of the optimum, the performance surface is flat and can ensure a good convergence property; (2) in the region far away from the optimum, the performance surface is sharp and can ensure a fast convergence speed; (3) in the region further away from the optimum, the performance surface is flat and can ensure robustness to large outliers. Chen et al. 21 proposed a corresponding adaptive minimum KRSL (MKRSL) algorithm which aims at minimizing the KRSL of the system error. Due to the excellent convergence of the MKRSL algorithm and its robustness to the impulse noise, we first apply it to the ANC system.
To ensure the ANC system achieving satisfactory NR in impulse noise environment, we propose the CFxLM algorithm based on convex combination. In the CFxLM algorithm, the filter based on LMS algorithm is chosen as the fast adaptive filter; the MKRSL-based filter is selected as the slow (high precision) adaptive filter. The two adaptive filters are coordinated to ensure good convergence of the entire system. The advantages of the CFxLM algorithm are twofold. First, it solves the contradiction between convergence rate and NR. Second, any prior knowledge of noise characteristics is not needed.
This paper is organized as follows: the “Novel convex combination-based AINC system” section introduces the CFxLM method and analyzes the conditions for convergence and the computational complexity; in the “Simulations” section, a series of simulations are carried out; the “Conclusion” section summarizes the investigation.
Novel convex combination-based AINC system
Structure
Figure 3 shows the structure of the novel AINC system. The dashed blue box in the figure represents the fast adaptive filter. Because of the simplicity of the LMS filter, we choose it as the fast filter. The dashed pink box represents the slow (high precision) adaptive filter. Since the MKRSL filter is robust to impulse noise and has good convergence, we choose it as the slow filter to offer low steady-state error. In the case of impulsive noise, the NR performance of the system is poor when using only the LMS filter (i.e. the FxLMS algorithm). The computational complexity of the LMS filter should be as small as possible with fast convergence and good NR. In the case of impulse noise, the big samples in reference signals will cause the significant error of the adaptive filter. If it is not limited, the coefficient of the filter will become larger according to the updating rules of LMS adaptive filter. It will lead to the instability of adaptive filter and even non-convergent. The big samples in reference and error signals are limited to the defined interval using the method in literature. 8 The symbol “T” in the figure represents the threshold. Considering the addition of thresholds to the reference signal can improve the algorithm’s robustness to impulse noise, the MKRSL and LMS adaptive filters share the clipped reference signal. The LMS adaptive filter plays a major role in the initial run stage; later, the MKRSL adaptive filter is dominant. These two filters coordinate with each other to offer good convergence of the entire system.
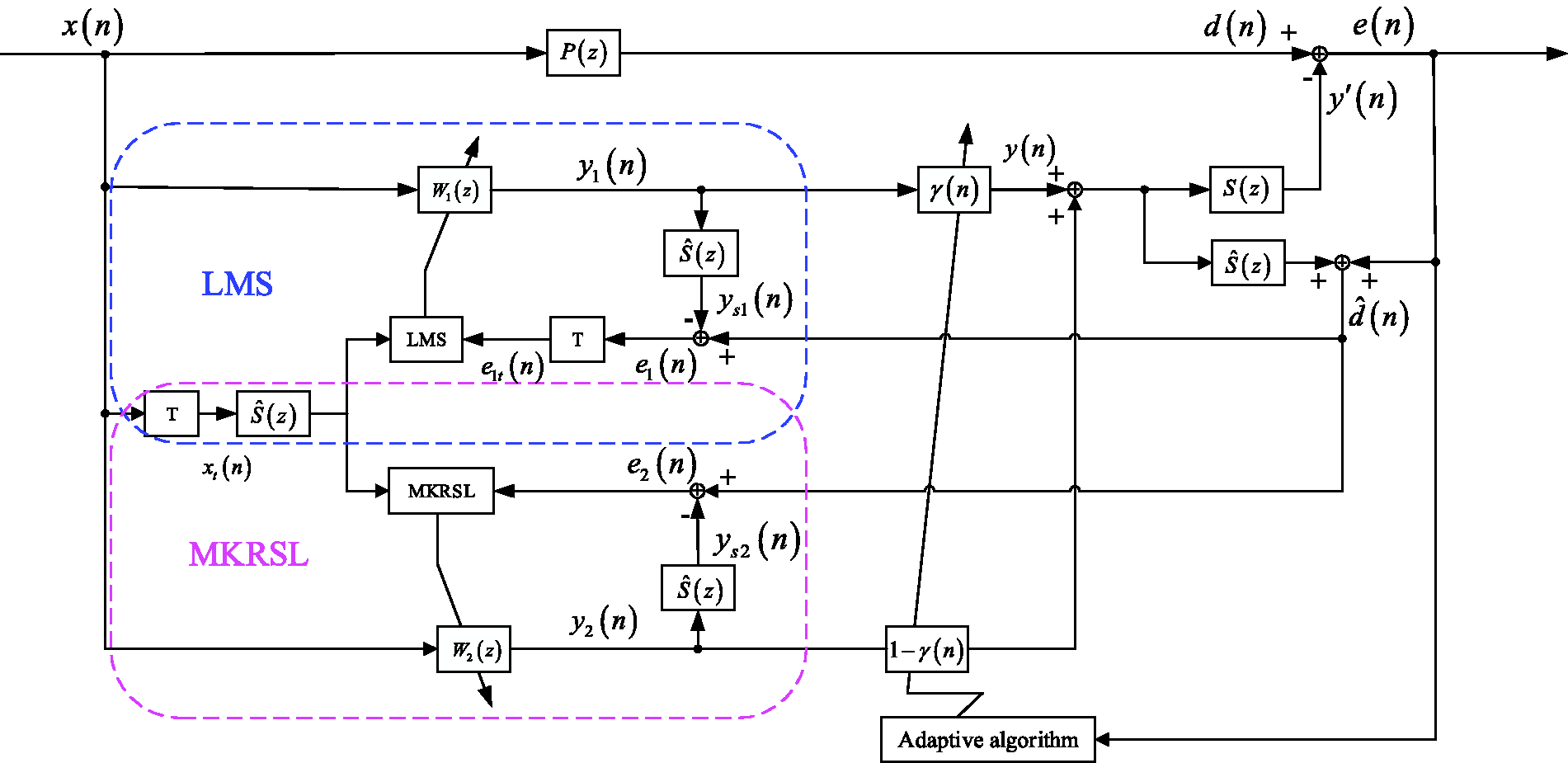
Structure of the CFxLM-based AINC system.
By using the convex combination form, the secondary noise



The mixing parameter
The CFxLM algorithm
The residual error of the AINC system is as follows

The

The error signals


To enhance the robustness of the LMS-based filter to impulse noise, we restrict big values in reference samples and error samples of LMS filter.
8
The modified reference signal and error signal of LMS filter are
After limiting the big samples, the update rule of the LMS filter is denoted as

The MKRSL and LMS filters share the clipped reference signal. The cost function of the MKRSL adaptive algorithm is

The mixing parameter



Substituting equation (12) into equation (11), we obtain the update rule of the

Compared with the MKRSL adaptive filter

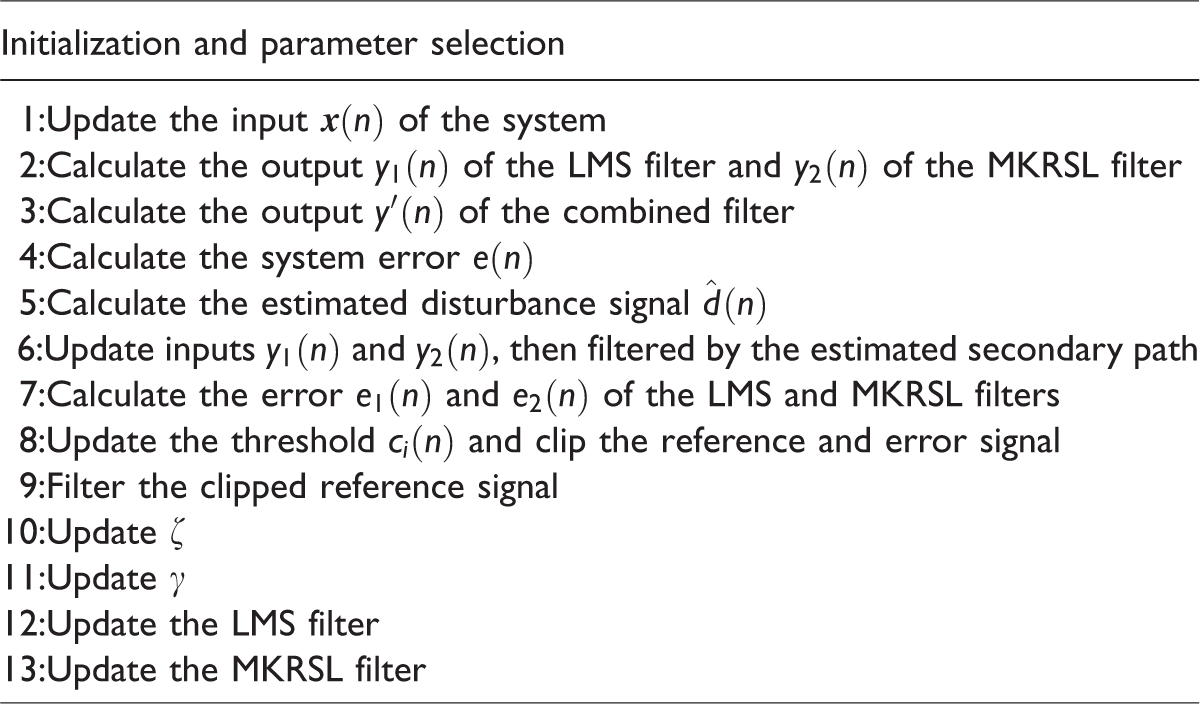
The detailed steps of the CFxLM-based AINC system are summarized in Table 1.
Detailed steps of the CFxLM algorithm.
This paper proposes a CFxLM algorithm based on convex combination. Considering the simplicity of LMS algorithm, it is used as the fast adaptive filter, which is responsible for providing good convergence speed for the system. Because that the MKRSL algorithm is robust to impulse noise and has good convergence, it is applied to the AINC system and acts as the slow (high precision) adaptive filter to offer a better NR for the system. These two filters are coordinated with each other to ensure that the AINC system achieves better convergence performance without the prior knowledge of noise characteristics.
Mean convergence analysis
The combined filter achieves convergence when both of its component filters converge. This section analyzes the condition that the step size should be satisfied when the component filters converge. The coefficients of the component filters in the CFxLM algorithm are updated according to equations (8) and (9) in steady state. The deviation of the weight vector in the nth iteration is



To assure that the component filters achieve convergence, 

The steady-state error of the convex combined controller is analyzed in Zhao et al.20 which indicates that the convex combined controller may attain the same performance as the best component filter when
Computational complexity
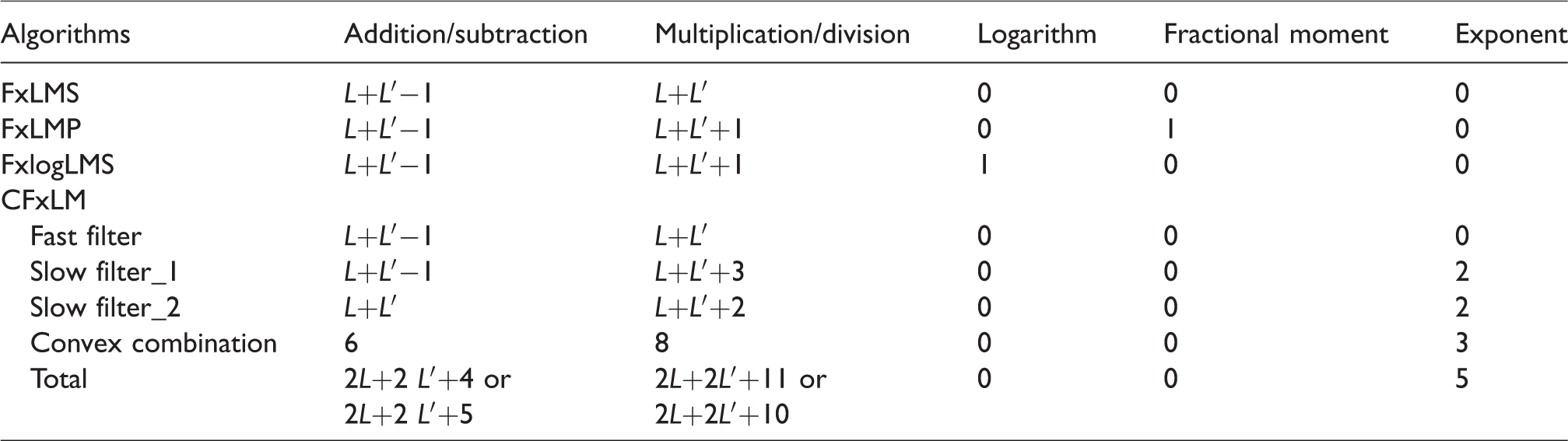
The computational complexity of the CFxLM and other methods is analyzed. Parameter
Computational requirements.
Simulations
To demonstrate the effectiveness of the novel AINC system, we carry out numerical simulations. Figure 4 shows the magnitude and phase characteristics of
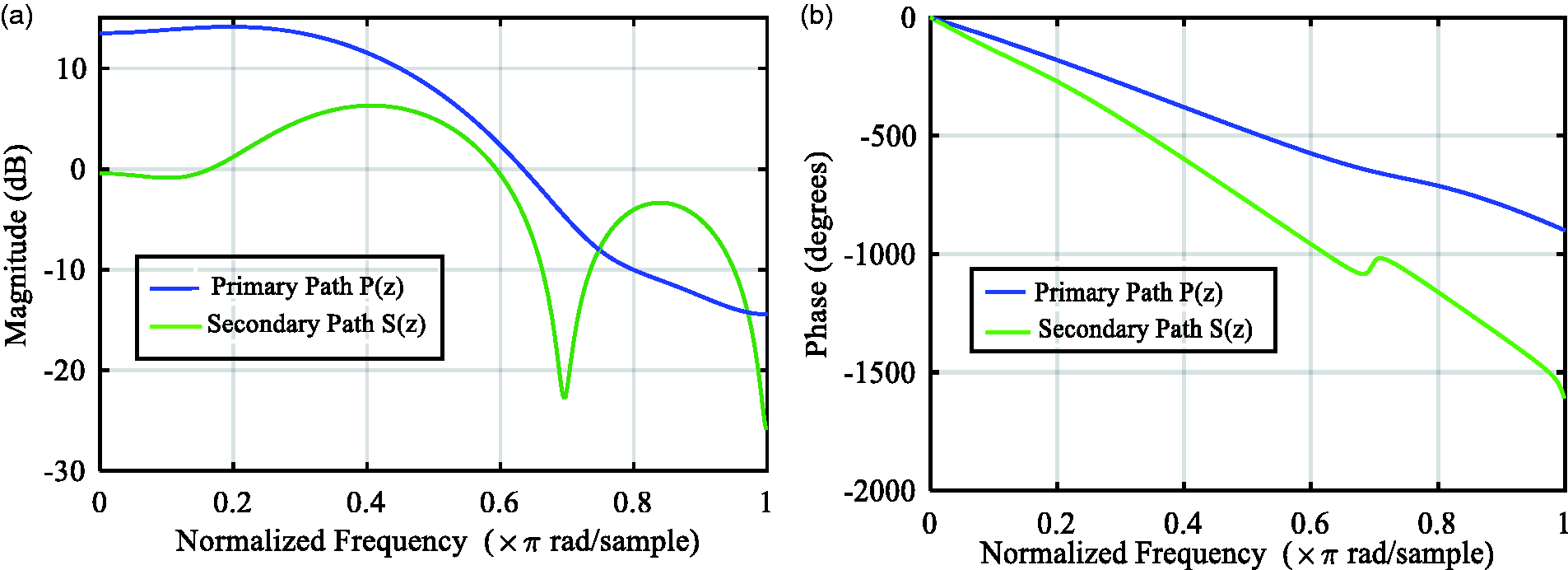
Magnitude (a) and phase (b) characteristics of P(z) and S(z).
Experiment I: Effect of sliding window size
We use the method in literature
8
to update the thresholds for limiting large samples. The sliding window size
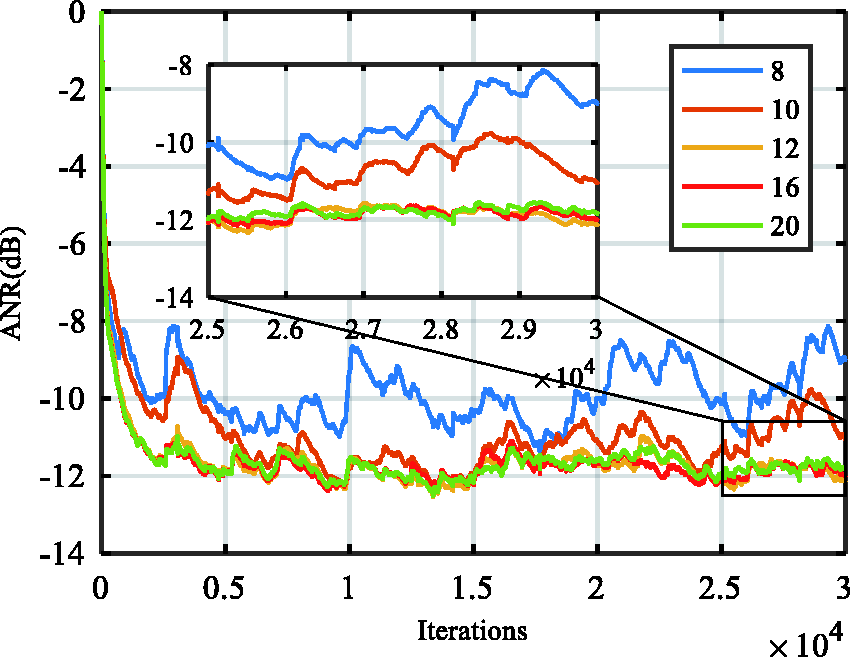
Effect of sliding window size for fast filter (α =
Experiment II: Effect of smoothing factor
When the LMS filter significantly outperforms the MKRSL filter, the MKRSL filter can adopt the acceleration scheme to update its weight according to equation (14), so the convergence speed of the MKRSL filter is accelerated. Therefore, the second experiment is conducted for the effect of the smoothing factor
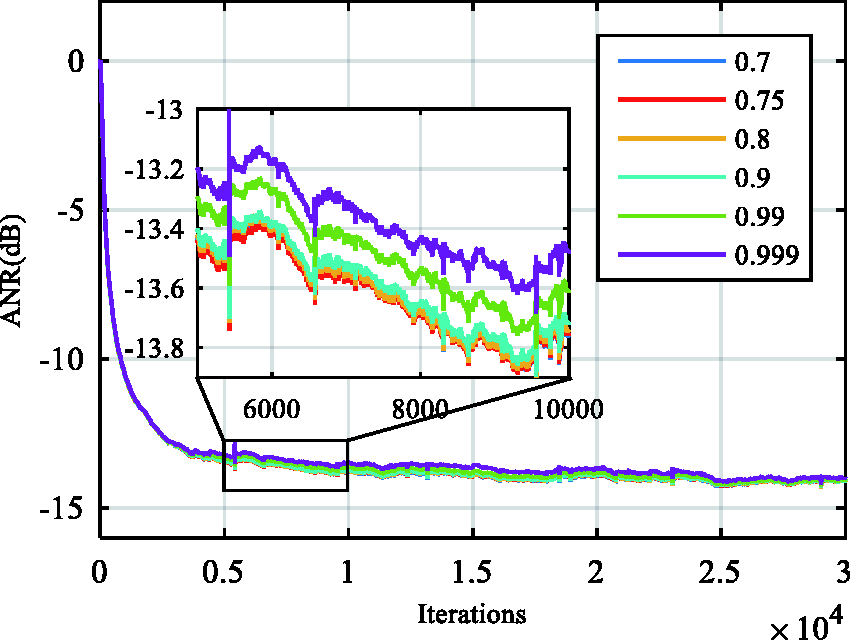
Effect of smoothing factor (α =
Experiment III: Performance comparison
This experiment aims to compare the NR of the CFxLM and other methods. First, Figure 7 shows the original primary noise of three cases, which correspond to
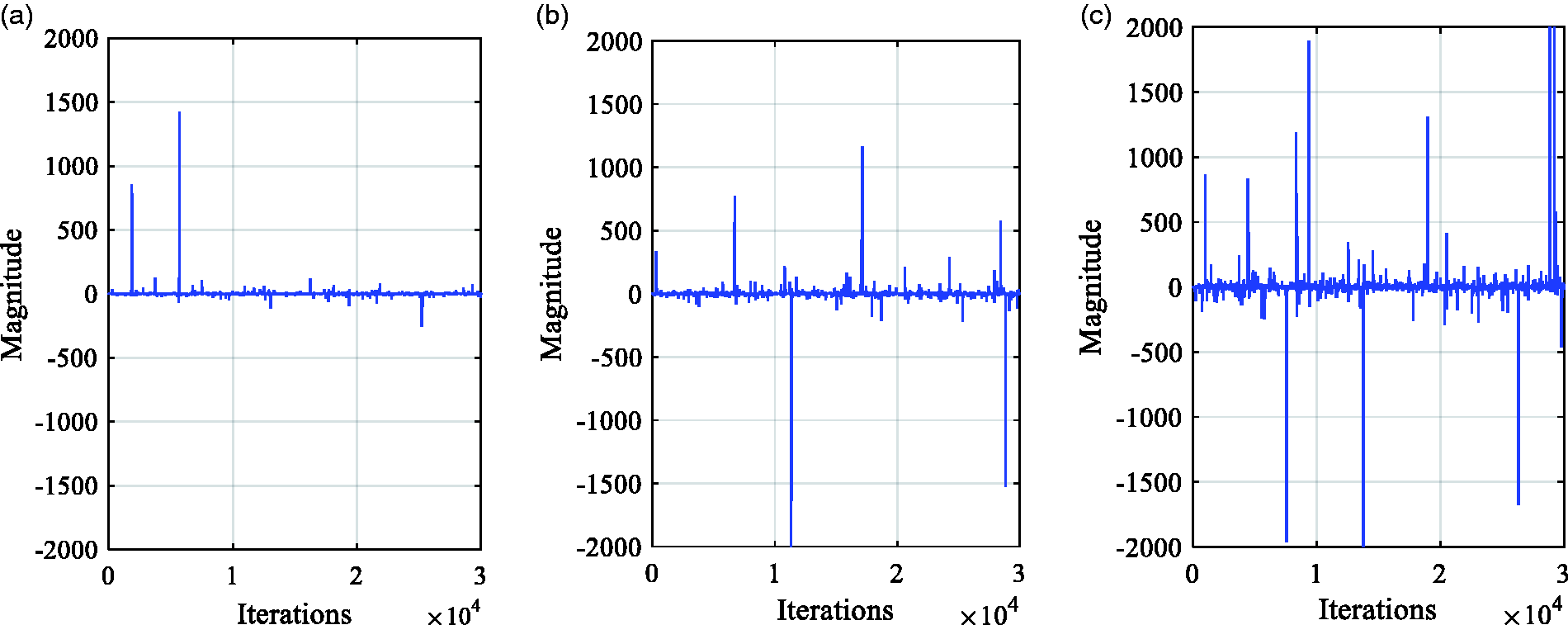
Original primary noise of: (a) α =
The effect of step size
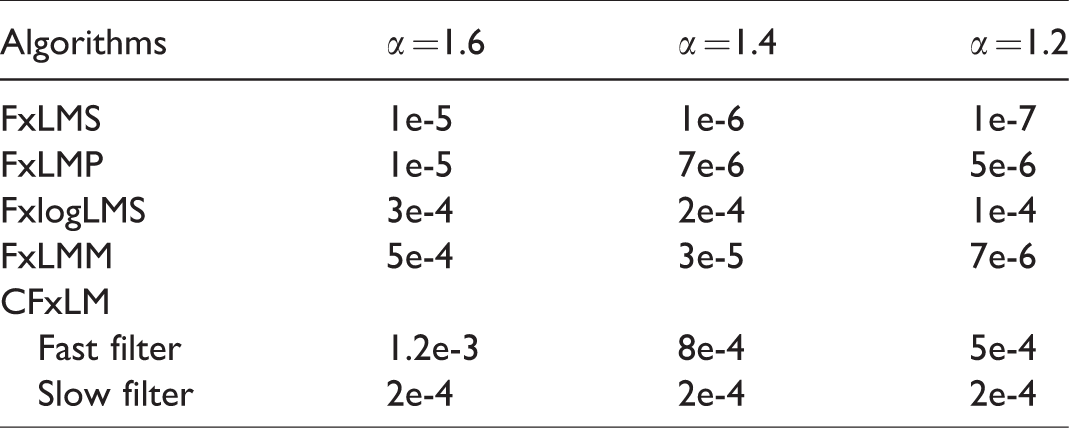
The adaptive filter can converge only when the step size satisfies at least equation (18), which provides a certain basis to select the step size. That is, the value of step size cannot be too large. If the adaptive filter does not converge with some step size, the value should be reduced appropriately. In practice, the appropriate step size is chosen by experiments. Here we take the fast adaptive filter as an example to illustrate the effect of step size at pulse noise α=1.4. From Figure 8, we can see that the adaptive filter has diverged when the step size is 3e-2, which indicates that the step size is too large and should be reduced. We determine the optimal step size for each method experimentally. The choice of the step size is based on the principle that the method offers both fast convergence and satisfactory NR. Table 3 lists the step size settings for each algorithm in the simulation.
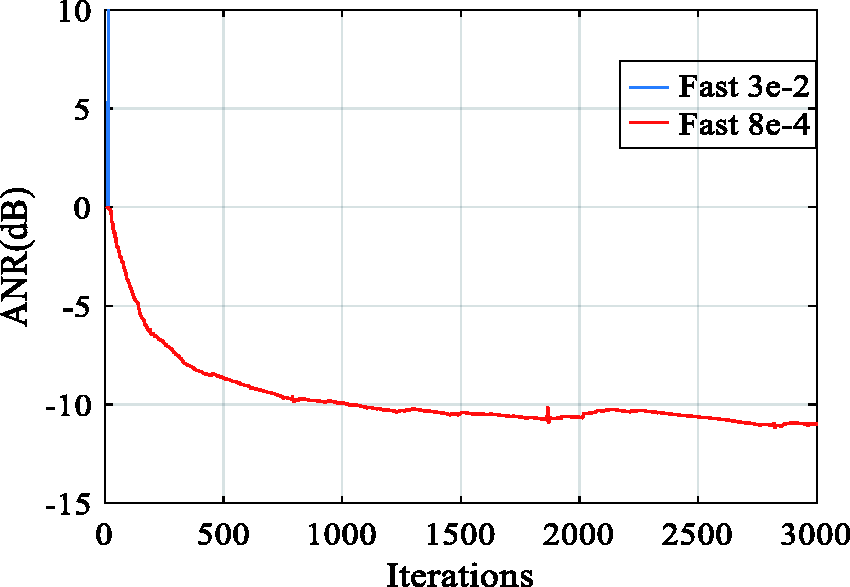
The effect of the step size of fast filter (α = 1.4).
The step size parameters.
The comparison of fast and slow filters
Figure 9 shows the performance comparison of the fast and slow filters (impulsive noise input α=1.4). Figure 9(a) indicates the error of the two filters and (b) indicates the comparison of averaged NR. It shows that the convergence speed of the fast filter is better than that of the slow filter, and the steady-state error of the slow filter is better than that of the fast filter. By taking advantage of the two adaptive filters, the optimal performance of the whole system is guaranteed.
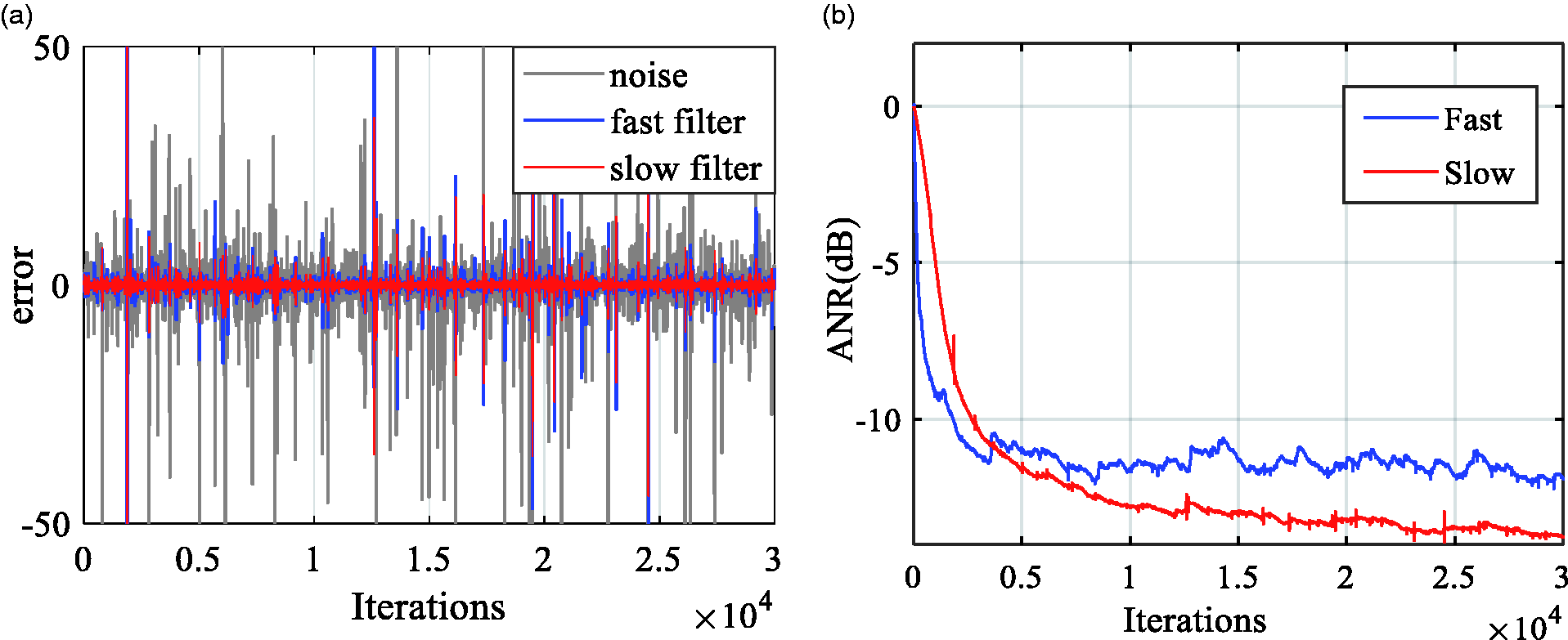
The error (a) and noise reduction (b) comparison of fast and slow filters.
Comparison of various algorithms
The ANRs of various algorithms in the case of three impulse noises are shown in Figure 10. On the whole, the proposed CFxLM algorithm has the best convergence performance. The fast filter gets the better convergence speed. The slow filter has the better convergence accuracy. After about 1000 times iteration, the fast filter transits to a slow filter, as shown in the combined CFxLM algorithm, which makes it to have the advantages of convergence speed and accuracy.
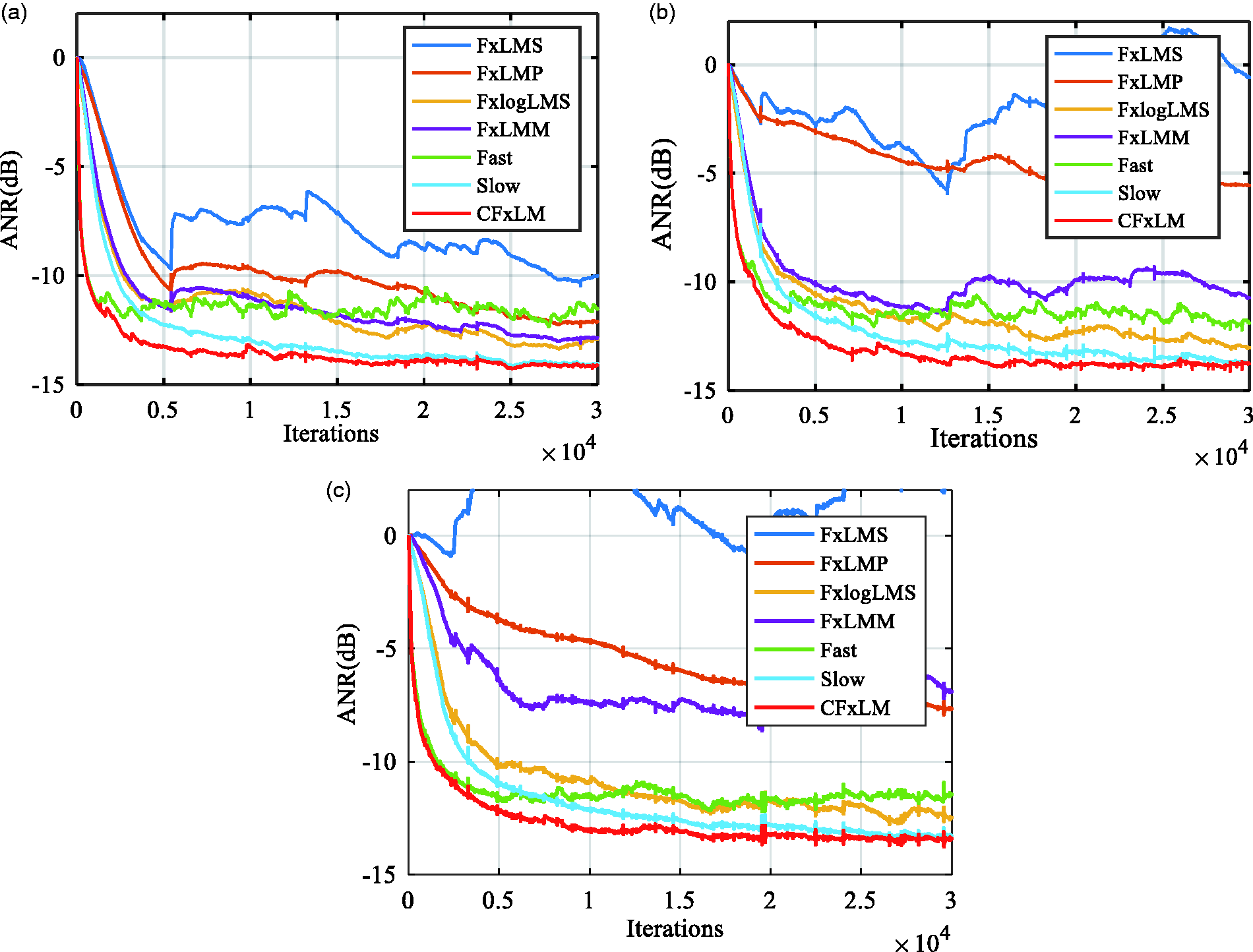
Performance comparison: (a) α =
To explain the advantages of the CFxLM method in detail, we analyze the convergence speed and NR in steady state. First, Table 4 lists the number of iterations required for each algorithm to reduce noise by 12 dB in the three cases. Compared with the MKRSL filter, the convergence speed of the combined filter increases by 50.5%, 53.7%, and 53.7%. It is clear from the table that the convergence speed of the CFxLM method is significantly better than other methods.
The number of iterations required for various algorithms to reduce noise by 12 dB.

Then to analyze the steady-state error, Table 5 lists the averaged ANR of each algorithm over the last 5000 iterations. In three cases, the CFxLM algorithm can achieve the NR of 14.12 dB, 13.79 dB, and 13.40 dB, respectively, corresponding to the maximum NR in each case. The above analysis proves that the CFxLM method can achieve greater NR than other methods in impulse noise environment.
The averaged ANR of each algorithm over the last 5000 iterations.

We also analyze changes in the mixing parameter. Figure 11 illustrates the learning curve of the mixing parameter
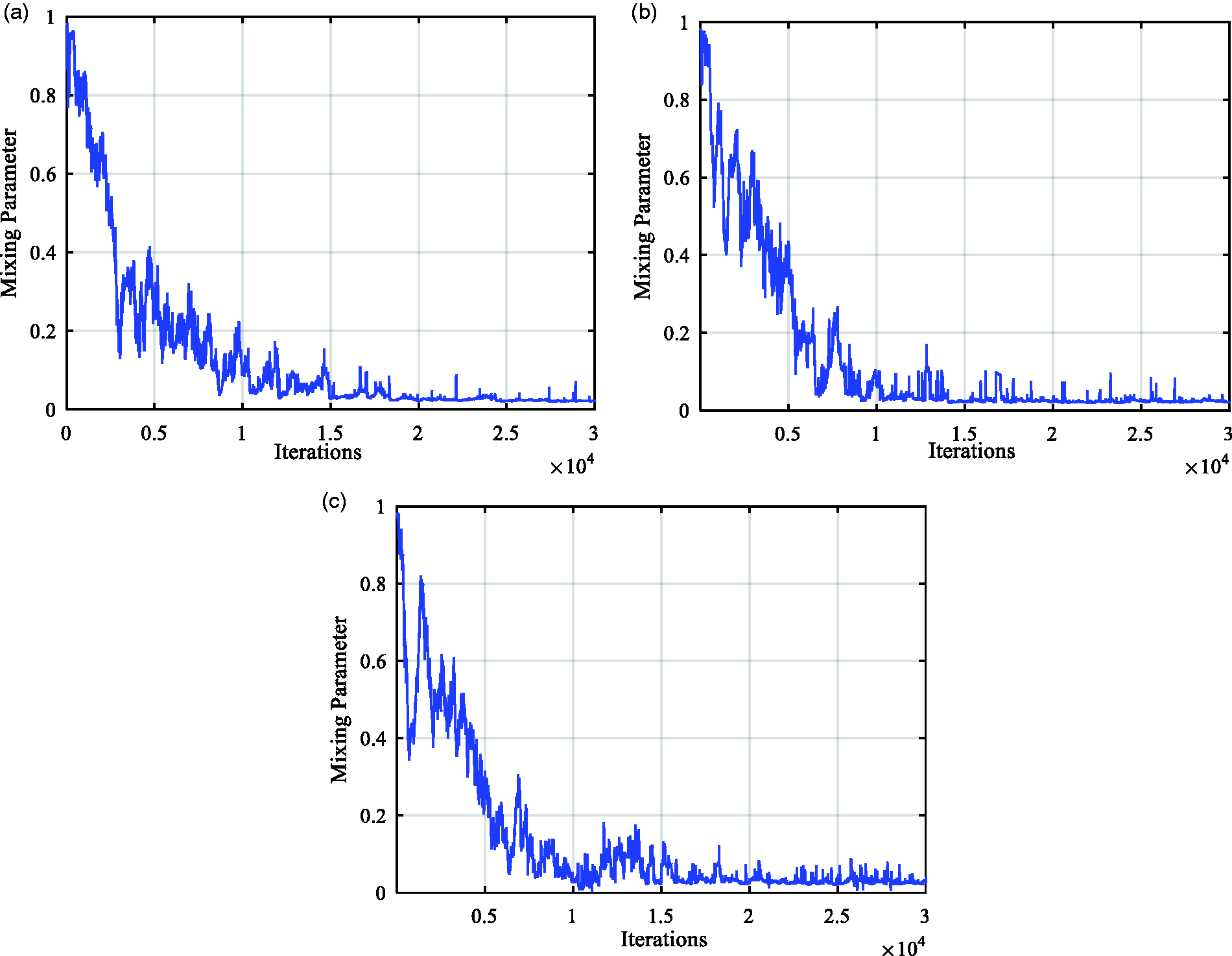
Learning curve of mixing parameter: (a) α =
Conclusion
To solve the contradiction between convergence rate and steady-state error of the AINC system, this paper develops a CFxLM algorithm based on convex combination for the first time. In the convex combined filter, a simple LMS adaptive filter is selected as the fast filter. About the slow (high precision) adaptive filter, we first apply the MKRSL algorithm to the AINC system to provide low steady-state error. The CFxLM algorithm shows advantages in controlling impulse noise in terms of convergence rate and NR without prior knowledge of noise characteristics. The simulation analysis verifies the effectiveness of the proposed CFxLM algorithm.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work was supported by the National Key R&D Program of China (2017YFF0204905) and the National Natural Science Foundation of China (61671039).