
Abstract
The vibration transmission characteristics of a three-degree of freedom nonlinear floating raft isolation system are studied in order to analyze the influence of magneto-rheological damper on primary resonance attenuation. A revised Bingham model verified by experiment is adopted to describe the nonlinear magneto-rheological damping force, and the dissipated energy based on the model is given which is more than general viscous damper. Then, the approximately analytic solution for primary resonance of floating raft isolation system is obtained by means of averaging method, and it is compared with numerical integration solution. Force transmissibility is proposed to evaluate the effectiveness of magneto-rheological damper. The influences of magneto-rheological damper parameters on force transmissibility are also investigated. The results show that force transmissibility decreases as the increase of viscous damping coefficient of magneto-rheological damper and zero-force velocity. The influence of control force is the same with in the first and third resonance frequency but has opposite effect in the second one. The results obtained from this work are benefit to control vibration transmission of rotating machine.
Keywords
Introduction
Vibration caused by periodic excitation of marine rotating machine not only influences the normal operation of sonar equipment but also increases radiation noise of the ship and vehicle.1,2 Vibration isolation is widely used in the various fields of engineering. To improve the isolation performance of the traditional single-stage and two-stage isolation system, floating raft as a special double-layer isolation system is used to reduce the level of noise and vibration. Floating raft isolation system that has an intermediate mass to support multiple devices has been widely applied to many kinds of ships.3,4
According to the requirement of external power supply, vibration isolation can be divided into three categories: passive, active and semi-active, respectively. Passive vibration isolation system that is more robust cannot be adaptive to the change of excitation frequency. For example, passive seat suspension with low natural frequency could amplify vibration in the low frequency range and then affect the ride comfort. 5 Conversely the active vibration isolation system utilizing hydraulic, pneumatic or electromagnetic actuators can provide high control performance but require big power supply and sophisticated control implementation. 6 Semi-active control systems reach a compromise between improvement of performance and simplicity of implementation. Several semi-active technologies have been proposed to suppress the vibration of different engineering structures. 7
Introducing nonlinearity in isolating system has been proven to be advantageous in some cases. Historically, damping nonlinearity was considered first. 8 Magneto-rheological (MR) damper with adjustable damping as a promising semi-active control device has been applied increasingly in vibration reduction due to its advantages. Micron-sized magnetic polarized particles which dispersed in nonmagnetic MR-fluid medium form chain-like structures along the magnetic field direction. Viscosity of MR fluids can be changed through applying external magnetic fields. Beyond certain field strength, the viscosity is so high that MR damper behaves like visco-elastic material. It takes a very short time (in milliseconds) to reversibly transit from fluidic to semi solid. Almost instantaneous change in viscosity has made MR damper very effective in various vibration control devices.9–11 Different kinds of MR damper have been designed and the influence of MR damper on different mechanical systems such as vehicles, mechanics, bridges and architecture has been studied widely.12–16 The research about application of MR damper in marine engine isolation has also been carried out. 17 Aslam et al. discussed the effectiveness of MR damper in one-stage isolation control of marine diesel engine according to the experiment result. 18
The Bingham plastic model is one of the earliest proposed and most widely used models for MR dampers. 19 It can describe the force-displacement characteristics but cannot describe the nonlinear hysteretic loop of force–velocity curve. There are also many other MR damper models established to describe its dynamic characteristic. The exact express on displacement of piston and relative velocity between piston and cylinder wall of the MR damper have been proposed by many researchers in different styles, but the parameters of most models are too complicated to analytical research. Peng et al. 20 have identified the parameter of the MR damper through modelling its mechanical performance with modified Bouc-Wen-Baber-Noori (BWBN) model. Dutta and Chakraborty21,22 have investigated the energy dissipation characteristics of the damper through modelling the MR-damper with Bouc-Wen hysteretic element and studied analytically the impedance of the nonlinear device based on equivalent linearization method. These methods mentioned above are difficult to implement for a simple analytical solution to obtain the dynamic response of complex isolation system with MR dampers. Yang et al. 23 proposed a revised Bingham model to simulate the hysteretic nonlinear force–velocity relationship of MR damper, and it is simple in expression and very suitable for theoretical research.
Averaging method also named as the Krylov-Bogoliubov (KB) method is similar to the method of parameters variation in ordinary differential equations. This method is equivalent to but simpler in derivation process than the multi-scale method. The averaging method as one of the most classical methods for analysing nonlinear oscillations is particularly useful for weakly nonlinear vibration problems. 24 Yang et al. 25 obtained vibrational transmission characteristic of a two-degree of freedom (DOF) nonlinear system in steady-state response by using averaging method. Xiong and Cao 26 used averaging method to investigate power flow characteristics of isolation system with a nonlinear damped oscillator and a linear damped oscillator subjected to a harmonic excitation.
Floating raft isolation system has achieved good effects beyond the system resonance region. The traditional passive isolators will enlarge vibration caused by mechanical rotation force in resonance region. In this paper, the primary resonance characteristic of raft isolation system with MR damper for marine auxiliaries is researched. The MR damper is modelled using the revised Bingham model with hysteretic element proposed by Yang. Dissipated energy of MR damper has been analytically given under the harmonic excitation. Then, the dynamic equations of raft isolation system with nonlinear MR damping are established. Force transmissibility is adopted as an isolation performance index to evaluate the property of dynamic system. And, this is calculated using averaging method. The influence of parameters of MR damper on the force transmissibility has been investigated. The conclusions obtained in the paper are helpful for further improving primary resonance control effect of isolation system.
MR damper model and energy dissipation
The Bingham model is simple in expression and clear in physical concept. Both the control force and the linear damping force, but not the hysteretic element is included in this model which can be expressed as

Considering the hysteresis characteristic of MR damper, the revised Bingham model with hysteretic loop is proposed as
23

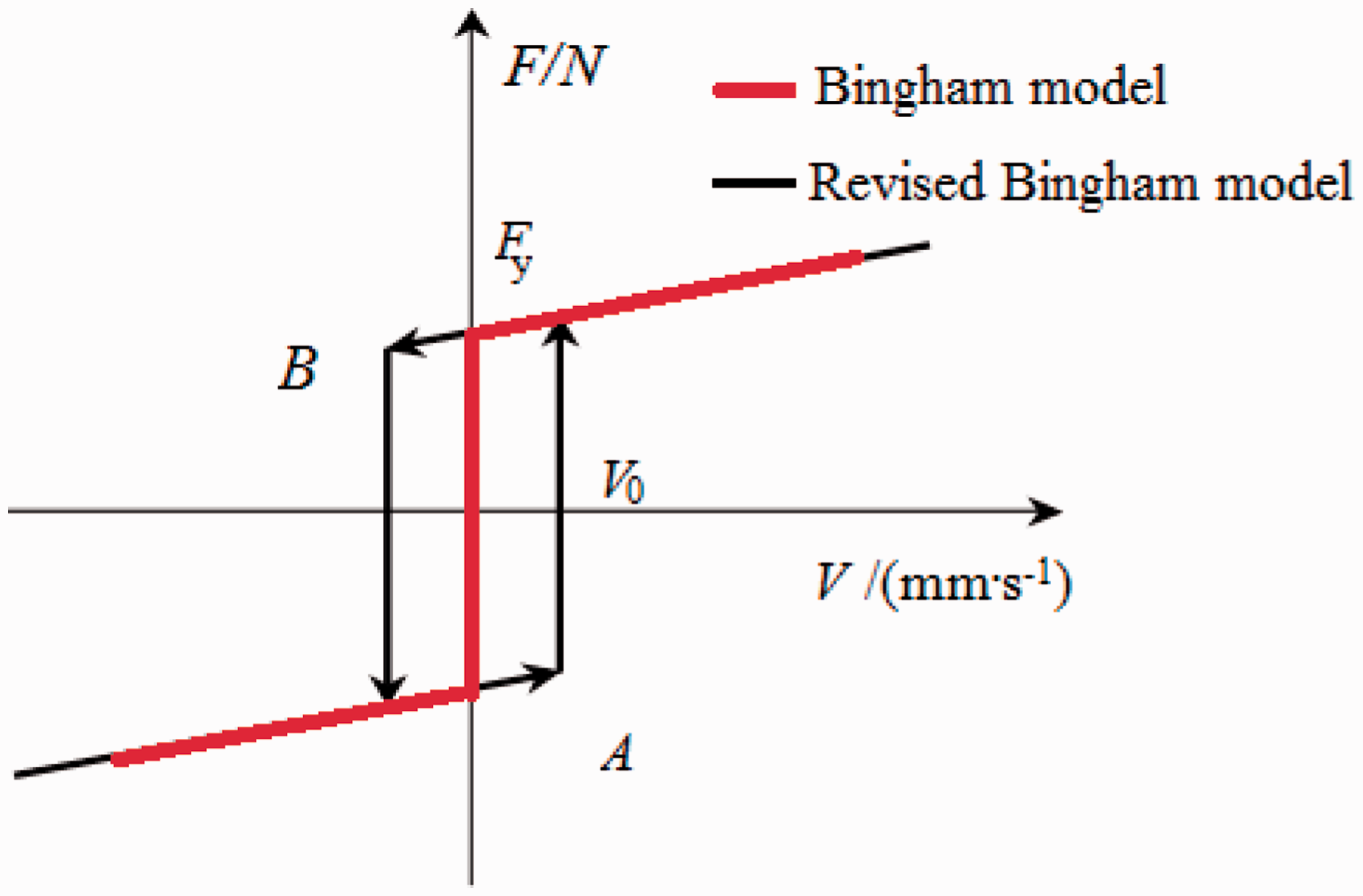
The Bingham models of MR damper.
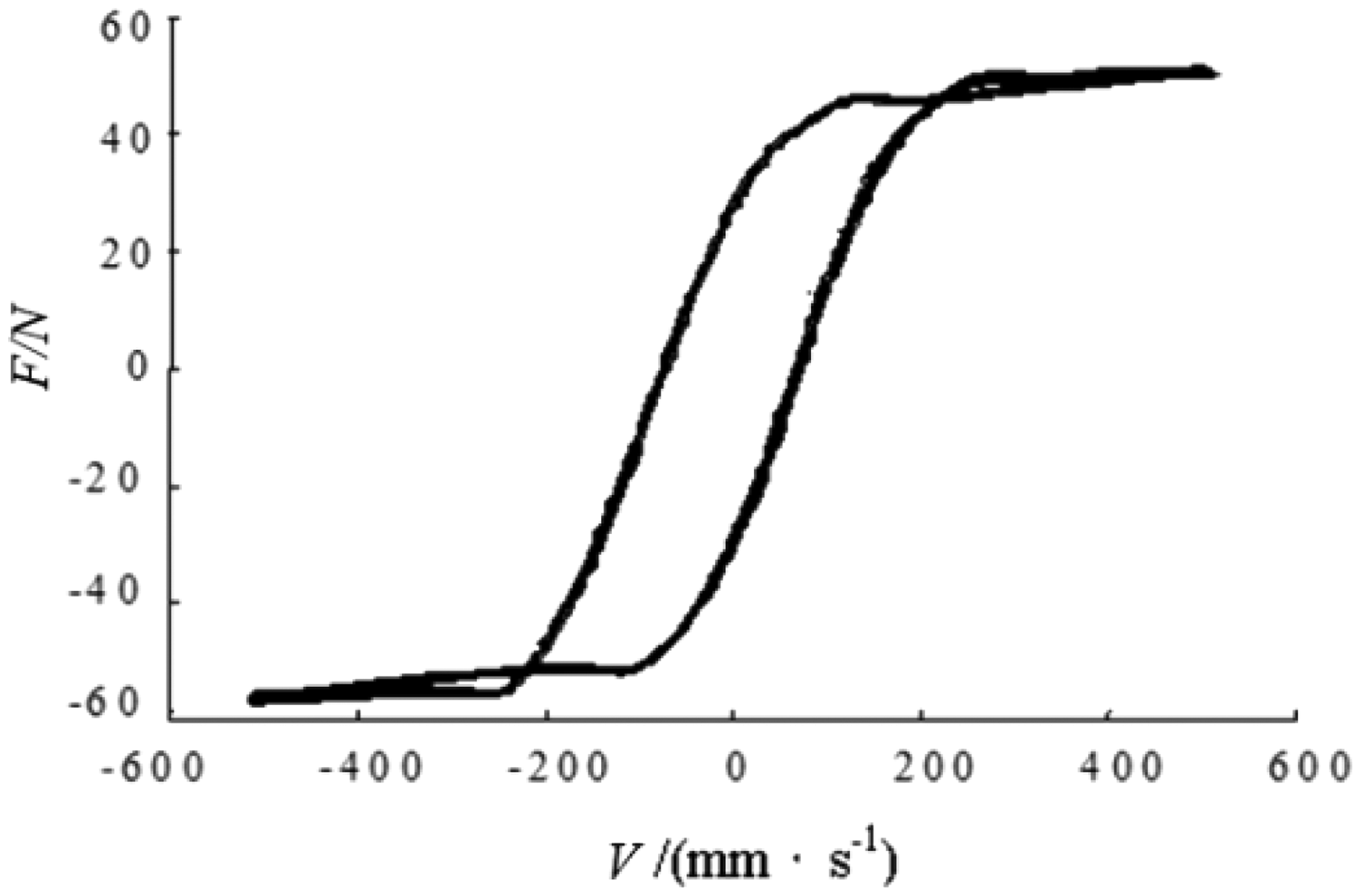
Dynamic model of MR damper.
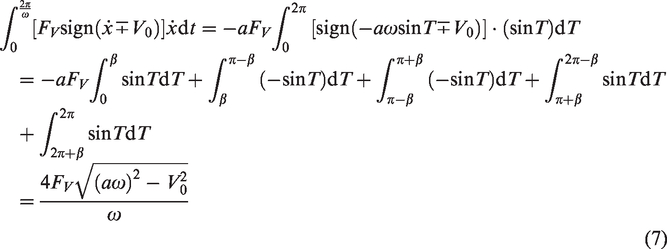
It is generally known that damping plays an important role near the resonance frequency owing to its dissipation ability. The section gives dissipated energy comparison between linear viscous and nonlinear MR damper subjected to harmonic excitation force. The vibration equation can be written as


In the revised Bingham model, the dissipated energy becomes

It is easy to find the dissipated energy of viscous damping of the MR damper is the same with general viscous damping. The second item is excessive dissipated energy which is expressed

Letting
The energy dissipated by MR damper is more than that of general viscous damping in evidence.
Mathematical model and approximately analytical solution
Figure 3(a) has shown the common floating raft vibration isolation system without MR dampers for marine auxiliaries which have good passive vibration isolation design. At present, the research on the marine machinery isolation system in the rated speed state has good isolation effect, but the vibration problem when machines power on and off state needs further study. The major cause producing exceeding vibration is resonance of isolation system at a speed less than the rated speed. To improve the isolation performance of passive raft isolation system for marine auxiliary machinery, MR damper with adjustable damping is introduced to investigate primary resonance performance. The schematic model of raft isolation system with MR damper is shown in Figure 3(b). Under the condition of low frequency and small amplitude, only the MR damper has strong force hysteresis and saturation nonlinearities and other passive isolator parameters have been addressed in linearization.
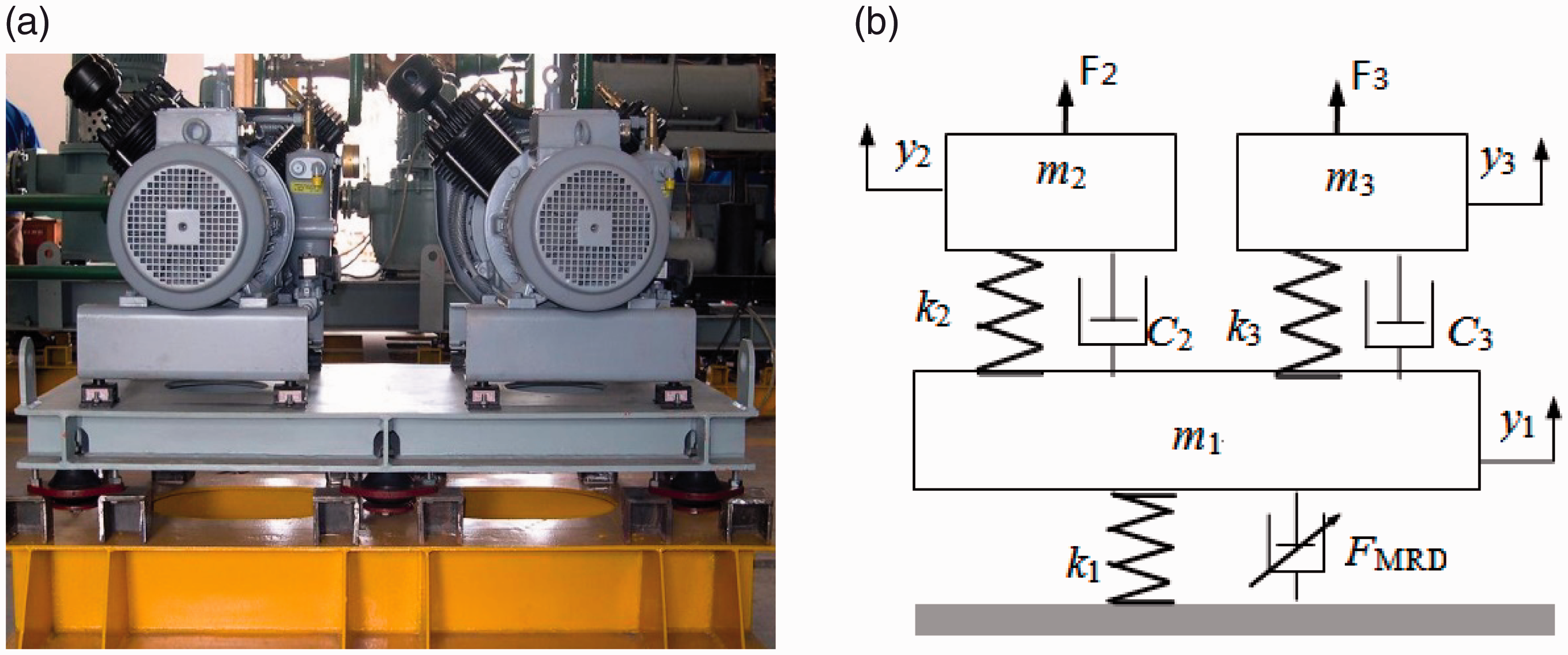
Floating raft vibration isolation system.(a) Raft isolation system for marine auxiliaries. (b) Schematic model of isolation system with MR damper
There are marine auxiliaries, intermediate mass, linear passive isolators and the nonlinear MR dampers in the isolation system. Where,

To simplify equations (8), the non-dimensional parameters are introduced as follows

The governing equation (8) is then transformed into a non-dimensional form

It is generally known that there is no accurate analytical solution when nonlinearity exists in differential equations. Analytical methods that have relatively low computational cost usually give approximately periodic average responses in some certain discrete frequency components. They are often used to obtain closed-form expression relating the response magnitudes to system parameters.
25
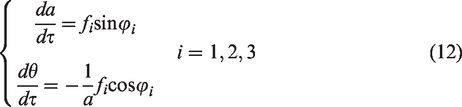
The averaging method is simpler in derivation process and has been widely used to derive first-order approximate relationship between dynamic responses and parameters of nonlinear vibrating systems. In this study, suppose the parameter


where

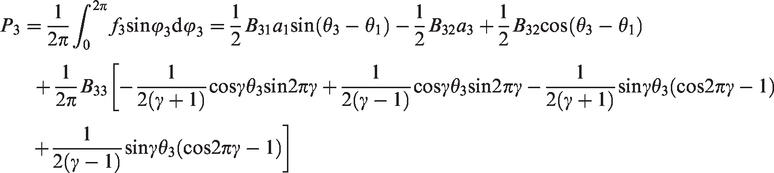
The determinant of the coefficient matrix of equation (11) is not equal to zero, and then six equations can be obtained according to Cramer's law
Considering that the response amplitudes and the phase shift angles are slowly varying function of

where




If


Else
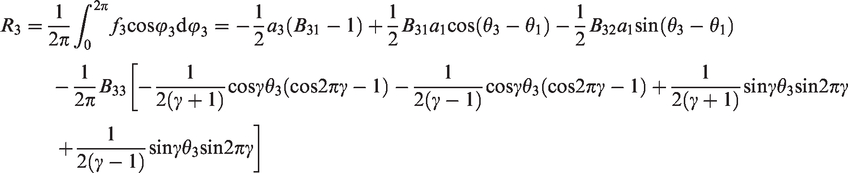
The response amplitude and phase shift can be considered unchanged in the steady state, so their derivatives will be zero. The equation set which is composed of the six equations about
The approximately analytical solution of the nonlinear floating raft isolation system can be obtained by solving the above nonlinear equations.

Ignoring the excitation force interaction caused by different phases among different machinery, the force transmissibility of floating raft isolation system is as follows

Analysis of vibration characteristics of floating raft system
The steady-state primary resonance is obtained using averaging method. Through setting the parameters of the MR damper as fixed value, the primary resonance response is analytically investigated. Different values of MR parameters depend on voltages applied to the damper which is related to magnetic field. The frequency range for primary resonance to appear and the influence of MR parameters on the resonance response are determined to help the vibration isolation system evaluation and control strategy design.
The main parameters of nonlinear floating raft vibration isolation system are collected in Table 1. The initial condition of equation (9) is chosen as
Model parameter values used in the calculation.
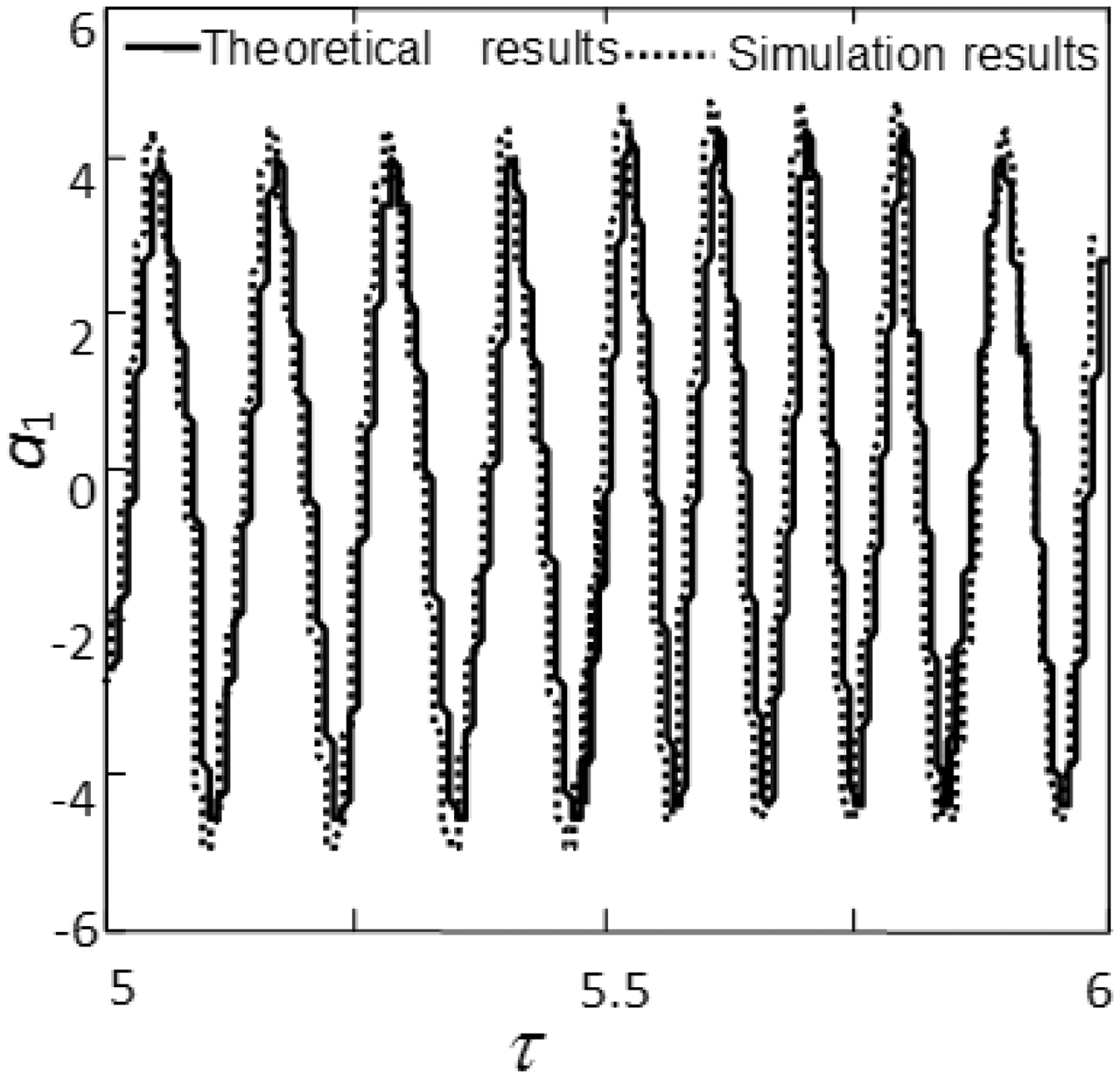
Comparison between averaging theoretical and numerical integration solution.
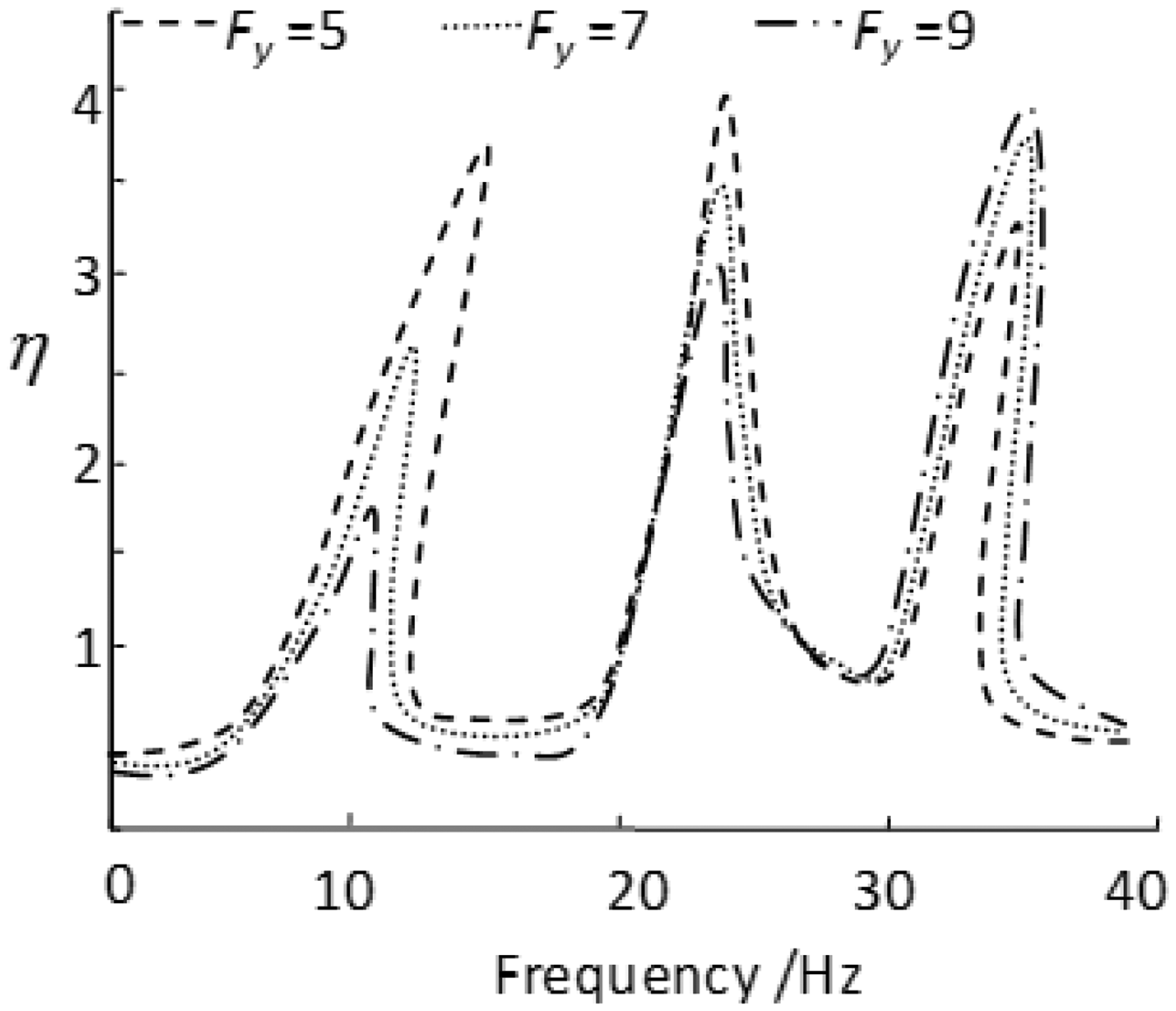
The increase of the force transmitted to the base not only causes fatigue damage of structure but also directly leads to excessive vibration and noise. Force transmissibility often used to measure isolation effect is given based on the analytical solution. The important influences of parameters of MR damper on the primary resonance are mainly studied in the paper. The comparative results are shown in Figures 5–7, respectively. It is found that the design has good isolation effect beyond resonance frequency and the force transmissibility of the isolation system has obvious nonlinear characteristics owing to the existence of hysteresis element of MR damper. Furthermore, the influence of nonlinear MR damper on the first and third resonance is more significant than the second one.
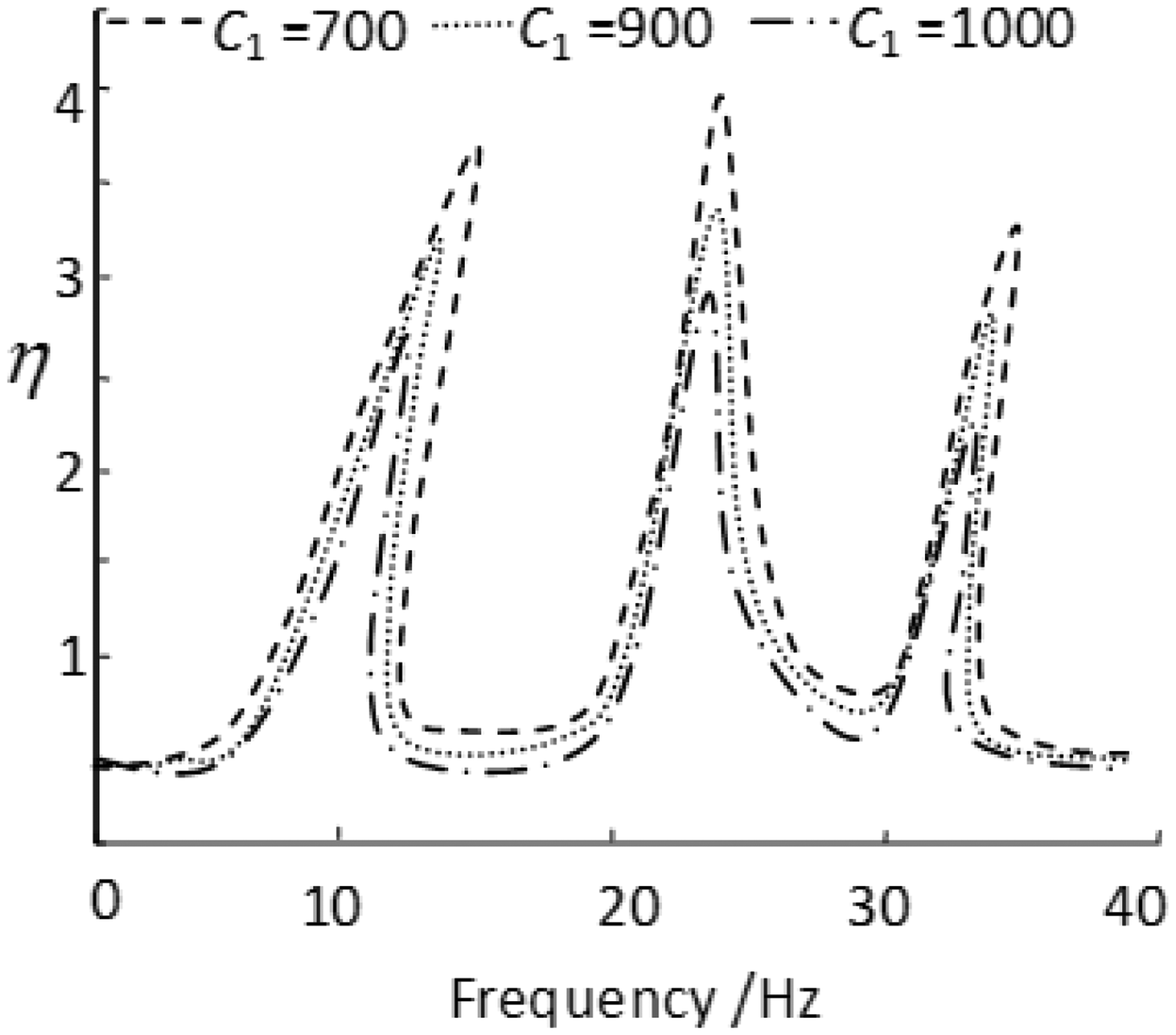
Force transmissibility under different
Force transmissibility under different
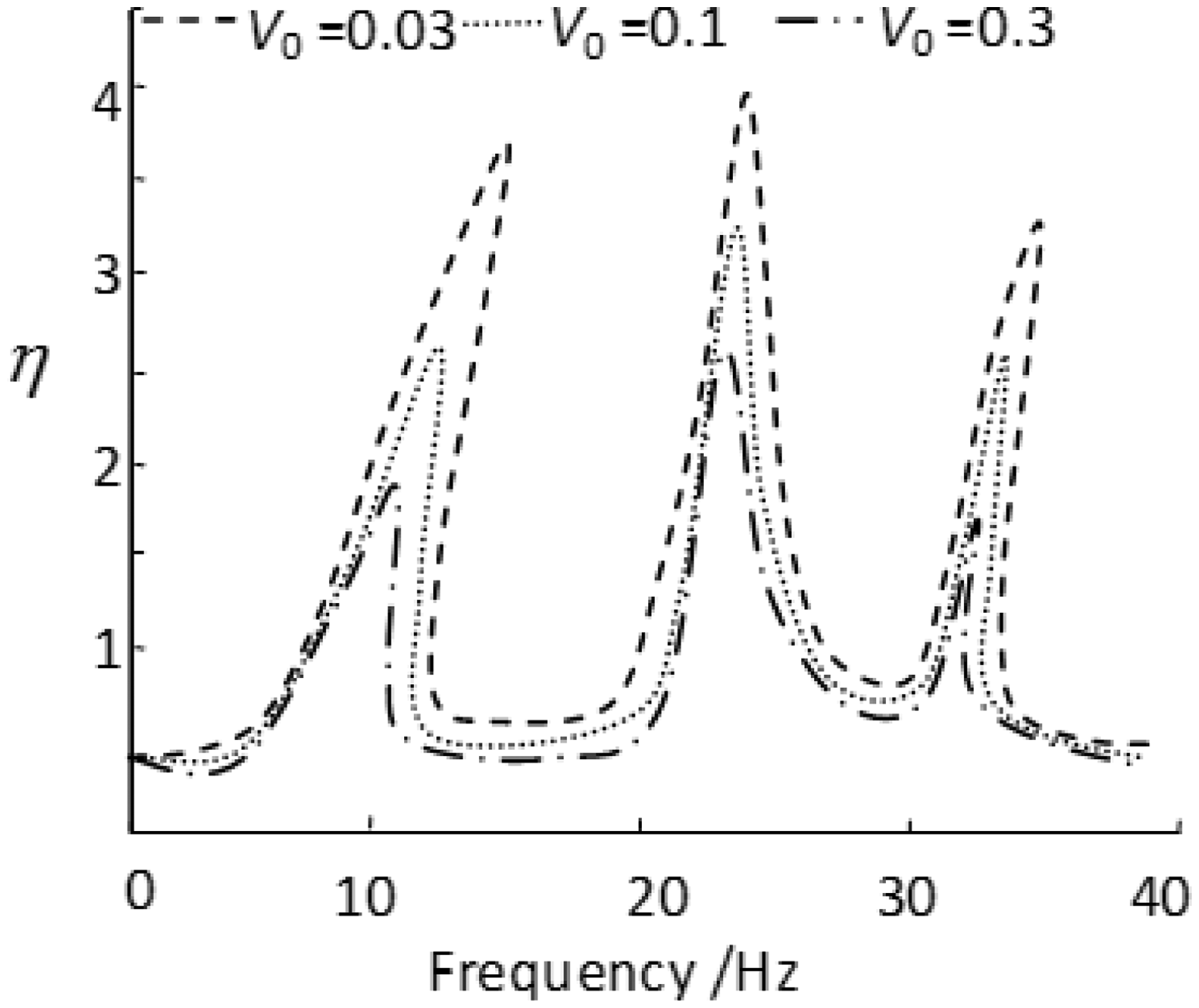
Force transmissibility under different
Different from the passive viscous damping coefficient, a high value of
The MR control force
The value of
Conclusions
The application of MR damper in semi-active control has received more and more attention in recent years because it can offer rapid change of damping characteristic with very low power requirements. In this paper, nonlinear MR dampers are applied to ship floating raft isolation system in order to suppress primary resonance response. A revised Bingham model for MR damper is introduced to describe the nonlinear damping force and then its energy dissipation is analytically given in harmonic motion state.
The approximately analytical solution of the three-DOF floating raft system is obtained using averaging method, which is in good agreement with the numerical solution. Taking the force transmissibility as an evaluation index, the characteristic of vibration isolation of MR nonlinear raft system is analysed. We can find there is a good isolation effect away from resonant region. The force transmissibility of the system increases rapidly and the vibration isolation effect of the system becomes worse in the primary resonance region.
The factors that affect the dynamic performance of isolation system are further studied, including the viscous damping coefficient
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: The research work reported in this paper was sponsored by the National Natural Science Foundation of China (No.51575238), the Natural Science Foundation of Jiangsu Province (BK2018278) and the Natural Science Foundation of Colleges of Jiangsu Province (16KJA580002).