
Abstract
In the field of active noise control systems, combining multiple algorithms to improve equalization performance has generated notable interest. Nevertheless, the computation of threshold control parameters for algorithm switching during each iteration leads to a significant increase in computational complexity. Additionally, the frequent switching of algorithms poses challenges in fully leveraging the performance of individual algorithms. Therefore, this paper utilizes the film editing concept to introduce the Algorithm Editing Method (AEM). AEM entails selecting appropriate algorithms based on distinctive iteration stages, followed by precise cutting and splicing according to the defined switching coefficient. Appropriate algorithms are implemented at specific iteration stages, eliminating the requirement for frequent algorithm switching during the iterative process. To substantiate the effectiveness of this approach, the FxLMS and Momentum-FxLMS algorithms serve as foundational components of AEM, enhancing convergence performance in an active noise control system. The results show a noteworthy enhancement in convergence speed and reduction of steady-state error, attained without a simultaneous escalation in computational complexity. Additionally, this study extends the application of AEM to improve the system’s robustness against impulse signals. The simulations and tests results demonstrate the method’s effectiveness, achieving a balance of optimized convergence speed, reduction in steady-state error, and minimized computational complexity.
Introduction
Active noise control (ANC) systems are essential methods for noise control and have wide applicability.1–5 The adaptive algorithm serves as the core of this system, and its implementation is significantly influenced by the computational cost. Therefore, after years of development, the filtered-x least mean square (FxLMS) algorithm has become the cornerstone algorithm used in the field of ANC due to its computational efficiency, simple structure, and easy implementation.6–11 However, the FxLMS algorithm’s relatively slow convergence speed under identical convergence criteria is a drawback.12–14
One potential improvement strategy for addressing this concern is to utilize non-FxLMS techniques. For instance, research conducted by literature 15 introduced the FxOWRLS algorithm with optimized weights, which aims to lower the coefficient upgrade ratio during the iterative process in order to reduce computational costs. Additionally, literature 16 proposed the introduction of the filtered-x maximum correntropy criterion with conjugate gradient (FxMCC-CG) algorithm, which resulted in a notable enhancement of the algorithm’s convergence speed and robustness. Literature 17 presented a new logarithmic loss function that considers the communication error of the residual signal. In addition, Literature 18 proposed a filtered-s Bessel CG (FsBCG)-I algorithm using a functional link artificial neural network as a controller. Literature 19 puts forth an ANC technique based on the FxAPLEHS algorithm. Additionally, the CSS-FxAPLEHS algorithm is proposed as a means of enhancing noise reduction performance. The proposed algorithm provides enhanced robust ANC performance. Literature 20 presents a novel hybrid active noise control (ANC, HANC) system, comprising an online secondary path modeling (OSPM) subsystem for input power control. Finally, in literature, 21 a novel version of the FXAPL algorithm based on nearest Kronecker product decomposition was introduced. While these improved algorithms show promising results by increasing convergence speed and reducing steady-state error, it is important to note that these advancements come with a significant increase in computational complexity.
One possible approach to improve the convergence performance of the algorithm while keeping computational complexity low is to expand upon the FxLMS algorithm. In the literature, the normalized FxLMS algorithm (NFXLMS) has been utilized as a means to eliminate system deviation resulting from Gaussian noise interfering with the ANC system via the computation of a supplemental vector. 22 Also proposed in literature is the robust filtered-x normalized least mean square sign algorithm (R-FxNLMSS), which maintains stability under various conditions. 23 This algorithm utilizes the Euclidean norm of the sum of the iterated weight vector and the current weight vector to perform the upgrade iteration of the filter. A simplified scheme for variable step-size filtered-x least mean square (SVSS-FXLMS) was proposed to conduct a thorough statistical analysis of a typical narrowband ANC system. 24 In addition, literature 25 introduced a novel algorithm for adaptive step-size FxLMS using a reference signal smoothing processor (NASFSxLMS) to expedite the convergence rate and mitigate the impact of outliers. A modal-FxLMS algorithm was introduced in the literature 26 for reducing the overall noise level in vibro-acoustic cavities. Similarly, in literature, 27 a FxLMS algorithm was proposed with a variable step size to enhance the convergence of the ANC system. The algorithm is based on the arctangent function for updating the step size. Although the computational complexity of these algorithms has decreased in comparison to earlier approaches that use non-FxLMS techniques, it remains decidedly greater than that of the FxLMS algorithm. The literature describes a revised rendition of the FxLMS algorithm, referred to as the Momentum-FxLMS algorithm (M-FxLMS). 28 While taking into account the momentum term during the weight coefficient iteration equation, this algorithm retains a computational complexity similar to that of the original FxLMS algorithm. This modification catalyzed the creation and integration of multiple algorithms constructed on the M-FxLMS framework.29,30 While the M-FxLMS accelerates convergence without elevating computational complexity, it does result in a rise in steady-state error.
Balancing computational complexity, convergence speed, and steady-state error presents a significant challenge when relying solely on a single algorithm. Therefore, the concept of combination algorithms is proposed and applied. For instance, literature proposes the convex combination of the filtered-x maximum versoria criterion (FxMVC) algorithm and FxLMS algorithm 31 as an example. A technique utilizing the convex combination of two normalized filtered-s least mean square algorithms (CNFSLMS) was proposed for nonlinear ANC systems in previous literature. 32 Another study 33 implemented the convex combination of an adaptive filter algorithm in a hearing aid system with a singular microphone and speaker to eliminate sound feedback signals. While combination algorithms can achieve balance in performance, the high computational complexity persists due to the necessity of calculating threshold control parameters for algorithm switching during each iteration. Additionally, the frequent switching of algorithms poses challenges in fully leveraging the performance of individual algorithms.
To address the aforementioned issues, this paper presents the Algorithm Editing Method (AEM), which employs the concept of film editing. AEM selects appropriate algorithms based on the characteristics of different iteration stages, precisely cuts and splices them according to the defined switching coefficient, and utilizes them in specific iteration stages. This approach eliminates the need for frequent algorithm switching throughout the iterative process. By using the switch coefficient as the trigger parameter instead of the threshold control parameter, the computation complexity is increased minimally. It acts as an editing method, allowing for the combination of multiple algorithms or multi-segment algorithms without requiring compatibility assessment.
In this paper, the FxLMS and M-FxLMS algorithms are utilized as fundamental constituents of AEM to improve convergence performance in an active noise control system. The results indicate noteworthy enhancements in convergence speed and reduction of steady-state error, accomplished without any simultaneous increase in computational complexity. Additionally, this paper extends the application of AEM to improve the system’s robustness to impulsive signals. The effectiveness of the method is evident from both simulation and testing results. The paper is organized as follows: the first section provides an introduction to the background and literature review, while the second section presents the analysis and theoretical derivation of AEM. The third section covers the analysis of computational complexity and simulation of convergence performance. The fourth section demonstrates the method’s effectiveness in handling impulse noise and enhancing convergence performance through experiments. The paper concludes in the fifth section.
Development of the algorithm editing method (AEM)
Description of ANC system
The diagram in Figure 1 displays the block diagram of an adaptive single-channel feed-forward ANC system. The feedforward reference signal is denoted by Block diagram of a single-channel ANC system.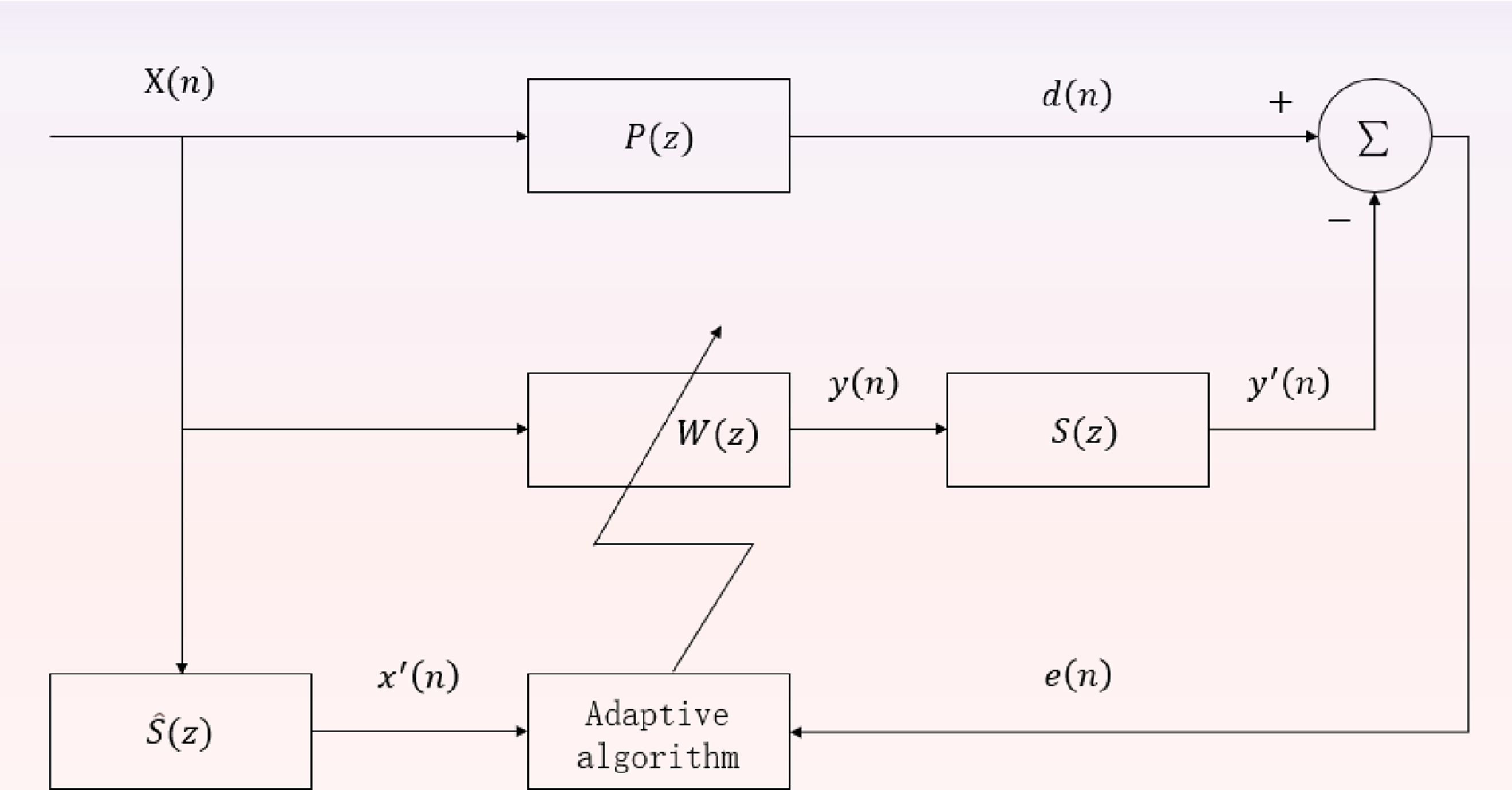
The adaptive filter output signal




The filtered-x least mean square (FxLMS) algorithm
The cost function for the FxLMS algorithm is expressed by the following equation

The loss function

The iterative process can be analogized to a ball rolling down a multidimensional bowl-shaped surface, as shown in Figure 2. The main objective of optimization is to quickly stabilize the ball at the bottom of the “bowl.” The FxLMS algorithm utilizes a constant step size, designated as Iterative process of the weight vector.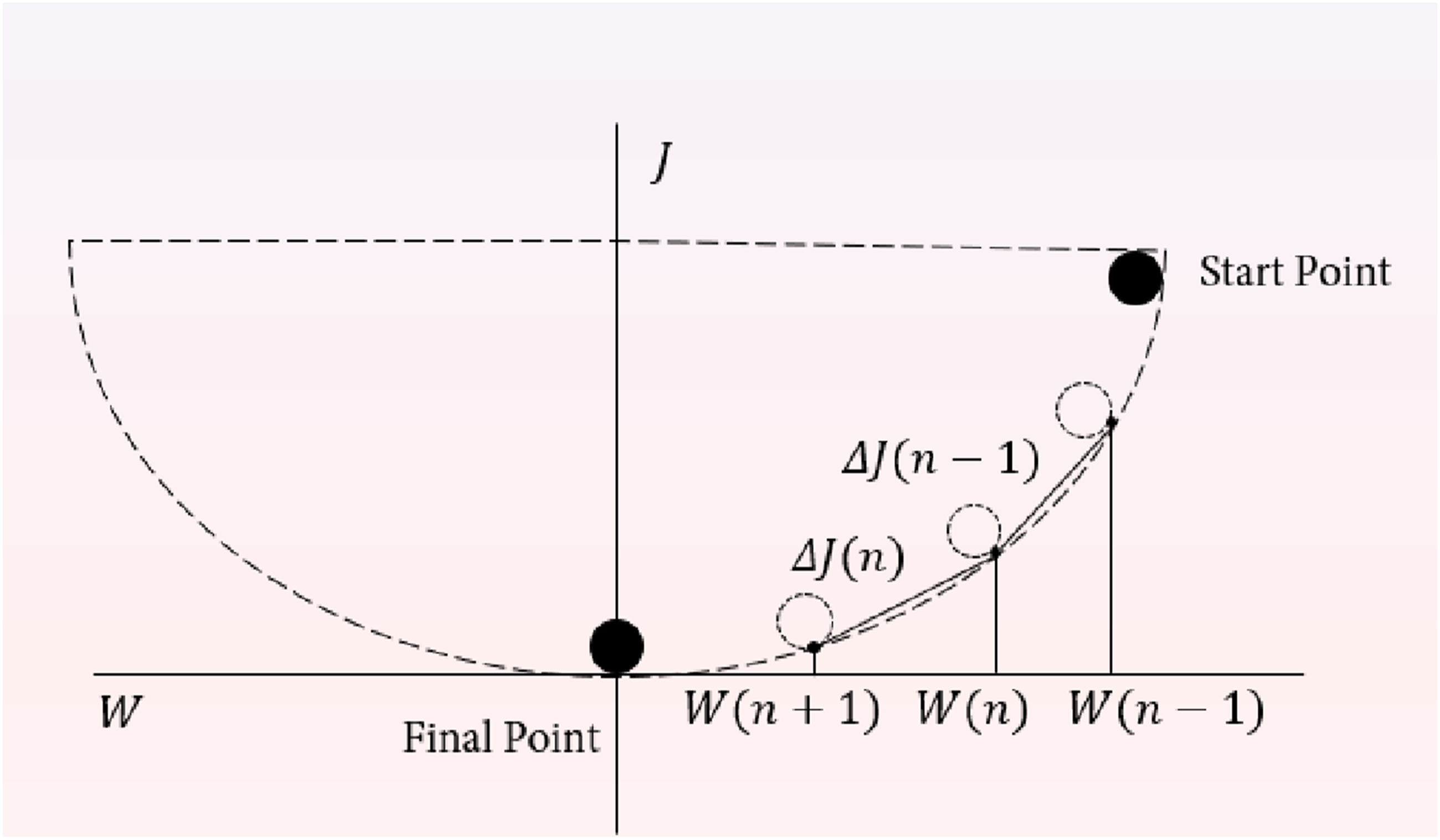
The momentum FxLMS (M-FxLMS) algorithm
The weight vector derivation equation for M-FxLMS algorithm can be obtained
36

The momentum term
The algorithm editing method (AEM)
In order to facilitate a comparison of the convergence performance of the aforementioned algorithms, it is necessary to take

The weight error fitness is defined as



A 2N-dimensional state vector can be defined as

The aforementioned equation demonstrates that the convergence of the algorithm is contingent upon the root of the transfer matrix

The algorithm converges when the condition
A study of the rate of convergence of algorithms
The speed of convergence of the algorithm can be evaluated by calculating the time constant of the weight vectors. The time constant of the ith weight vector iteration of the algorithm can be obtained using the following equation

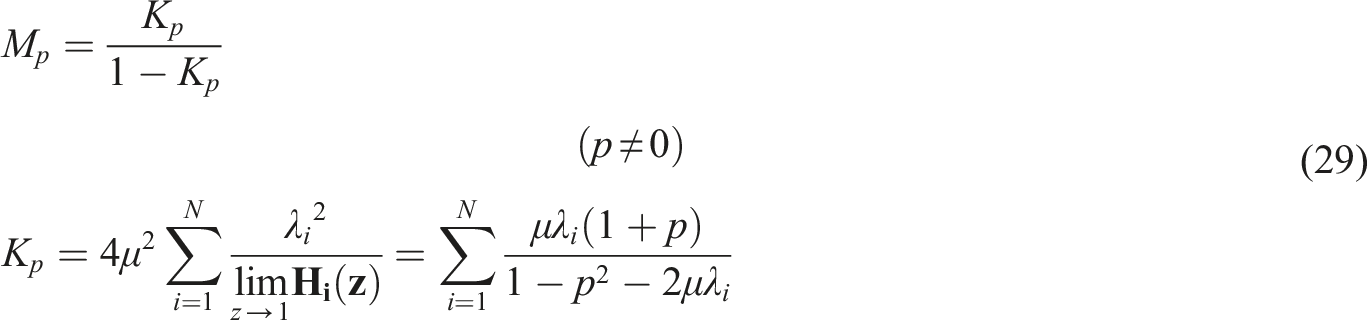
Combining equations (12) and (13) yields




Equation (18) represents the time constant of the momentum FxLMS algorithm. It is noteworthy that this equation becomes the time constant of the FxLMS algorithm when

From the above relationship, the momentum FxLMS algorithm has a smaller time constant and converges faster compared to the FxLMS algorithm, since
A study of the misalignment of algorithms
The misalignment is a measure of the proximity of the adaptive process weight vector to the Wiener solution, and can characterize the accuracy of the convergence of the algorithm, when the misalignment is large, the converged solution will always oscillate around the optimal solution with a large magnitude, in order to analyze the misalignment performance of the two algorithms, the following variables are defined

The minimum mean square error when the algorithm converges to the optimal solution, designated as



Define the overshooting mean square error as

A Z-transformation of the aforementioned equation yields the following result

Upon combining the equations (21) through (23) with equation (25), the following result is obtained

Subsequently, the overshooting mean square error at the point of convergence for the algorithm can be expressed as follows

The misalignment of algorithms can be quantified as follows






As can be observed from the aforementioned equation, the momentum FxLMS algorithm exhibits a greater degree of misalignment than the FxLMS algorithm. Furthermore, the magnitude of this misalignment is directly proportional to the value of
The advantages of the algorithm editing method (AEM)
The analysis indicates that the momentum FxLMS algorithm exhibits a faster convergence speed than the FxLMS algorithm. However, it also demonstrates a larger dissonance. The inverse relationship between convergence speed and dissonance suggests that it may be challenging to achieve an optimal balance between these two performance metrics when employing either algorithm in isolation. To address this challenge, in this paper, the algorithm editing method is employed to merge and adapt the two algorithms, segmenting the overall convergence process into two phases. Initially, at the outset of the iteration, the momentum FxLMS algorithm is utilized to achieve a faster iteration speed, with a larger
In order to analyze the convergence performance of the algorithm editing method, it is assumed that the first iteration represents a dividing line between two distinct phases. Furthermore, it is assumed that the momentum FxLMS algorithm is used when


From the aforementioned equation, it can be observed that by modifying the values of the parameters


Subsequently, the gradient of the weight vector in question, both before and after the algorithm switch, can be obtained



A comparison of equations (39) and (41) reveals that the larger gradient of
Applications of the algorithm editing method
The block diagram of the algorithm editing method is depicted in Figure 3, and a detailed illustration is presented in Table 1. Block diagram of the AEM. Architecture of the AEM.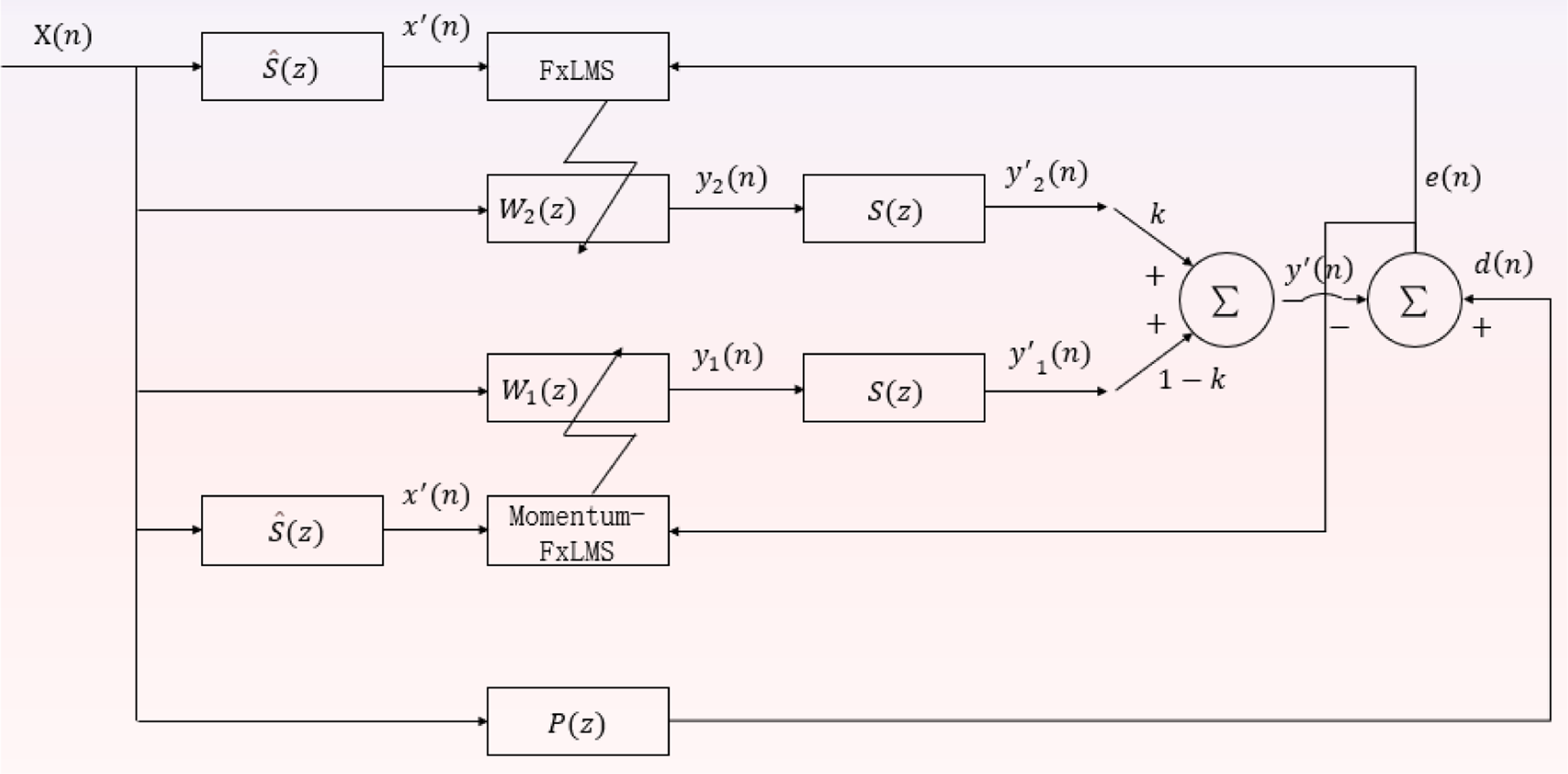
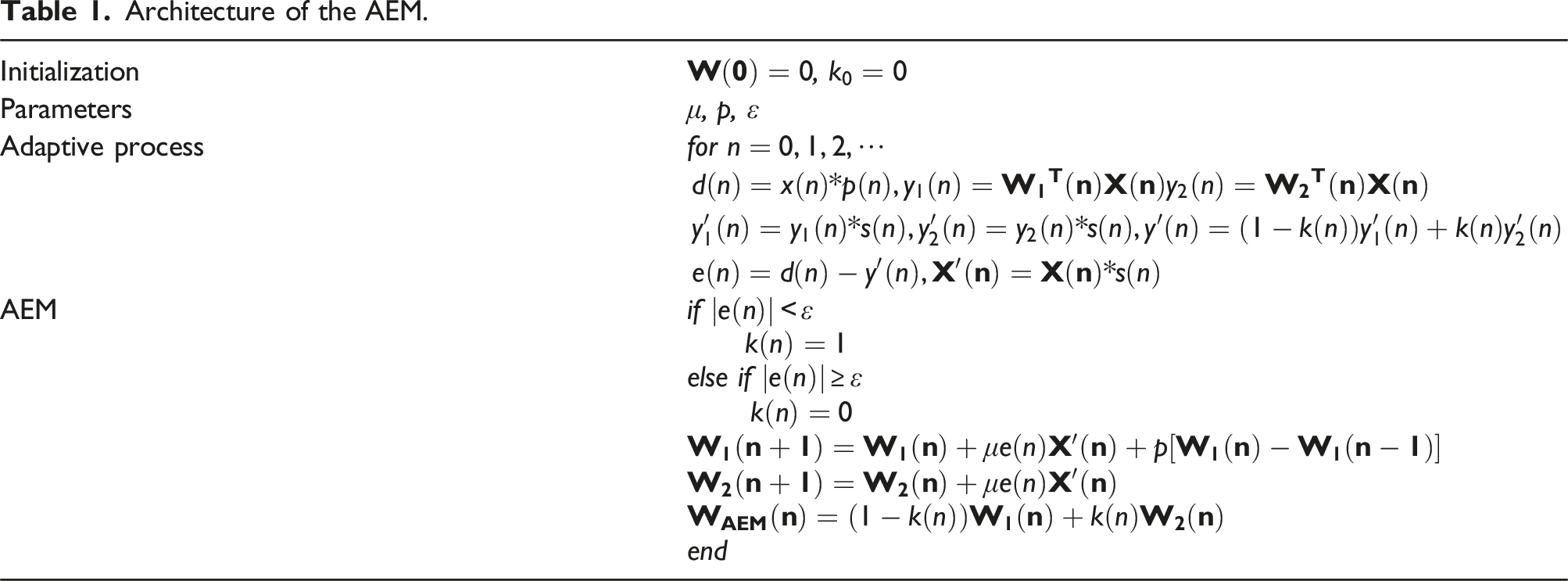
The overall output expression of the filter in the Algorithm Editing Method (AEM) can be represented as follows
To avoid calculating threshold control parameters for algorithm switching in each iteration, the switch coefficient 
The presence of impulse signals poses a significant challenge in the implementation of ANC systems. Aberrant samples, characterized by spikes or disproportionately large values originating from impulse signals, have the potential to induce considerable oscillations in the weight coefficients of the adaptive filter within the algorithm, potentially leading to algorithmic divergence. A series of algorithms have been developed with the aim of enhancing the resilience of ANC impact resistance.37–39 A literature-referenced approach addressing the mitigation of impulse signals was introduced to enhance the system’s robustness.
40
Upon surpassing a predefined threshold, the reference signal 
The methods described exhibit notable robustness in handling less acute impulse signals, characterized by 

The architecture of the AEM against impulse signals.
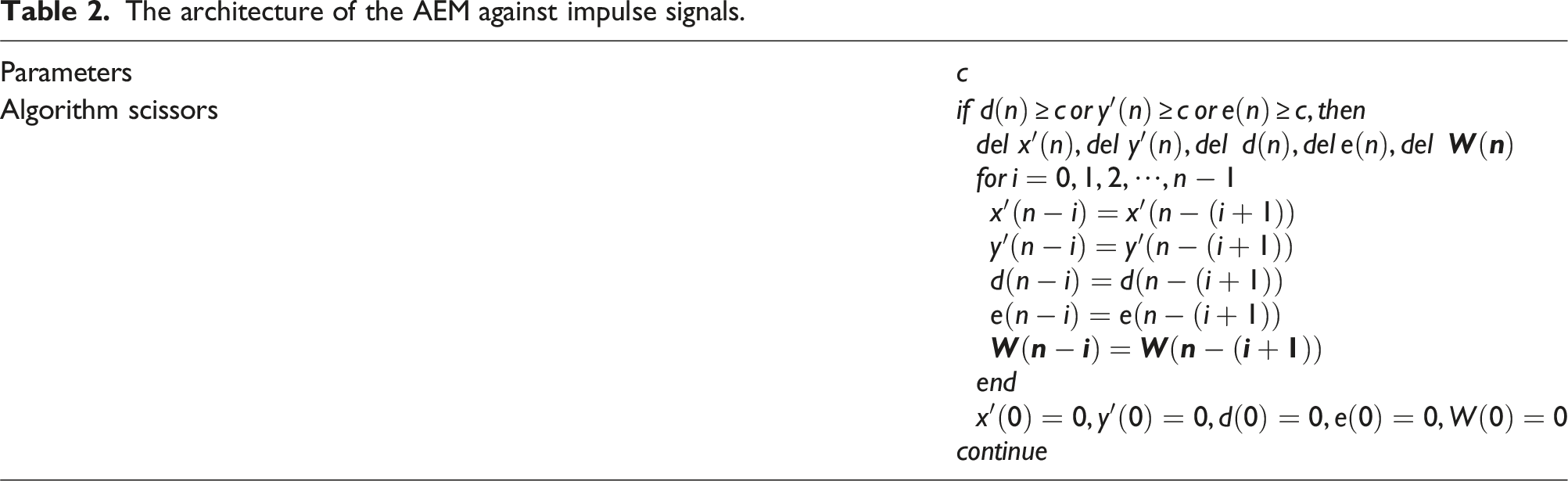
To attenuate the impulse signals via a “clipping” process, the computations are executed in accordance with equation (47) through equation (51)




The parameter
Simulation of the performance of the algorithm editing method (AEM)
The convergence performance simulation
Simulation parameters of algorithms.

Simulation results of algorithms for convergence performance.

The results reveal that, subject to identical convergence criteria, the AEM-enhanced algorithm demonstrates an escalated convergence speed of 26.7% compared to the FxLMS algorithm, and 12.8% compared to the M-FxLMS algorithm. It is noteworthy that this performance advancement is attained without imposing a substantial increase in computational complexity.
In order to thoroughly assess the algorithm’s performance improvement, the iterative process is partitioned into three discrete stages. The initial stage encompasses data points from 30 to 250, denoting the early phase of the iteration. The subsequent stage covers data points ranging from 251 to 550, representing the middle phase. Lastly, the late stage encompasses data points from 551 to 1200, characterizing the final phase of the iteration. These three stages collectively encapsulate all data relevant to the three algorithms.
To systematically investigate the iterative path of the filter weight coefficient vector, we perform a statistical analysis on the first-order data of the weight coefficient vector and generate a violin plot. The residual data undergoes synchronous processing using a similar approach. This technique is akin to dissecting the multidimensional ‘bowl’ of the iterative process (demonstrated here with 7 dimensions) and closely examining the trajectory of the “ball” within this section. Since the dissection is conducted along the loss function The initial stage of iteration process. (a) Different algorithm trace ranges of The middle stage of iteration process. (a) Different algorithm trace ranges of The final stage of iteration process. (a) Different algorithm trace ranges of 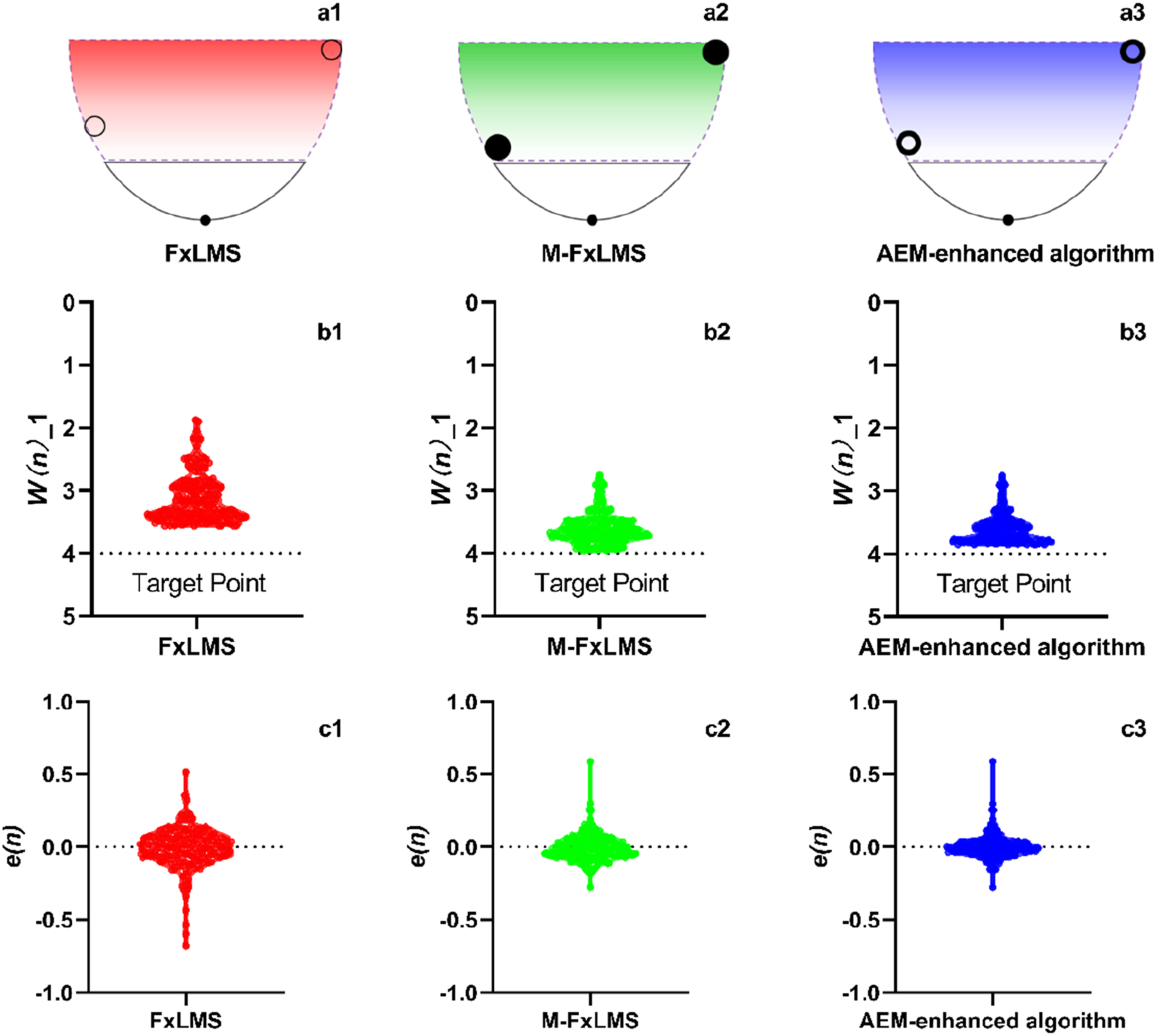

The plot in Figure 4 illustrates that during the initial iteration phase, the M-FxLMS algorithm overall distribution (b2) is notably closer to the target point compared to FxLMS (b1). Moreover, the range of track points in this distribution is significantly narrower than in FxLMS, indicating that M-FxLMS algorithm achieves the optimal weight coefficient at an accelerated rate in the early stages of iteration. This results in a reduction of deviation and oscillation in the optimization process. This leads to a more densely concentrated distribution of iterative residuals (observed in the comparison between c1 and c2). This behavior is elucidated in Section 2.3: the Momentum-FxLMS algorithm can be construed as an FxLMS algorithm with an increased iteration step. This comparison can be likened to a “ball” with greater inertia rolling from the edge of a “bowl” during the optimization iteration process (observed in the comparison between a1 and a2), thereby accelerating the descent in the optimization process. However, owing to the effect of inertia, the M-FxLMS algorithm displays a distribution more akin to a diamond as opposed to the pyramid-like shape observed in the FxLMS algorithm (b1 Vs. b2). Upon comparing b3, b2, b1, it becomes apparent that the AEM-enhanced algorithm amalgamates the merits of the other two algorithms. The trajectory points exhibit a narrow range in close proximity to the optimal weight coefficient, displaying a pyramid-like distribution. This configuration ensures the most rapid convergence speed. The affirmation of this observation lies in the comparison of residual errors. This phenomenon is primarily attributed to the AEM, proposed within this paper. AEM employs a switching coefficient to clip and splice the M-FxLMS and FxLMS algorithms, combining their individual strengths. This conceptualization can be envisioned as the substitution of a “partially inertial ball” (a3) for both the “non-inertial ball” (a1) and the “fully inertial ball” (a2). As a result, during the initial iteration comparisons, the AEM-enhanced algorithm demonstrates the best convergence performance.
In Figure 5, it is evident that in the middle stage of iteration, notable oscillations were detected in b2 near the optimal weight coefficient. This behavior can be primarily ascribed to the adverse influence of the inertia associated with the M-FxLMS algorithm during the optimization process. As a result, this occurrence induced discernible oscillations in the residual signal (c2), subsequently impacting the convergence speed. In reference to the FxLMS algorithm (illustrated by b1), it is apparent that the absence of inertia results in minimal oscillation during this phase. Additionally, the trajectory points are predominantly clustered in close vicinity to the optimal weight coefficient. In contrast, The AEM-enhanced algorithm (b3) effectively mitigated the adverse effects of inertia. As a result, the oscillation amplitude of its trajectory points demonstrated a notable decrease in comparison to M-FxLMS (b2). Regarding the residual signal, the AEM-enhanced algorithm (c3) displays a noticeable enhancement when compared to M-FxLMS (c2). Nevertheless, its concentration level of the residual signal does not reach the same degree as achieved by FxLMS (c1). Consequently, during the evaluation of the middle stage of iteration, the AEM-enhanced algorithm demonstrates intermediate convergence performance. The M-FxLMS algorithm exhibits the least favorable performance, while the FxLMS algorithm proves the most effective.
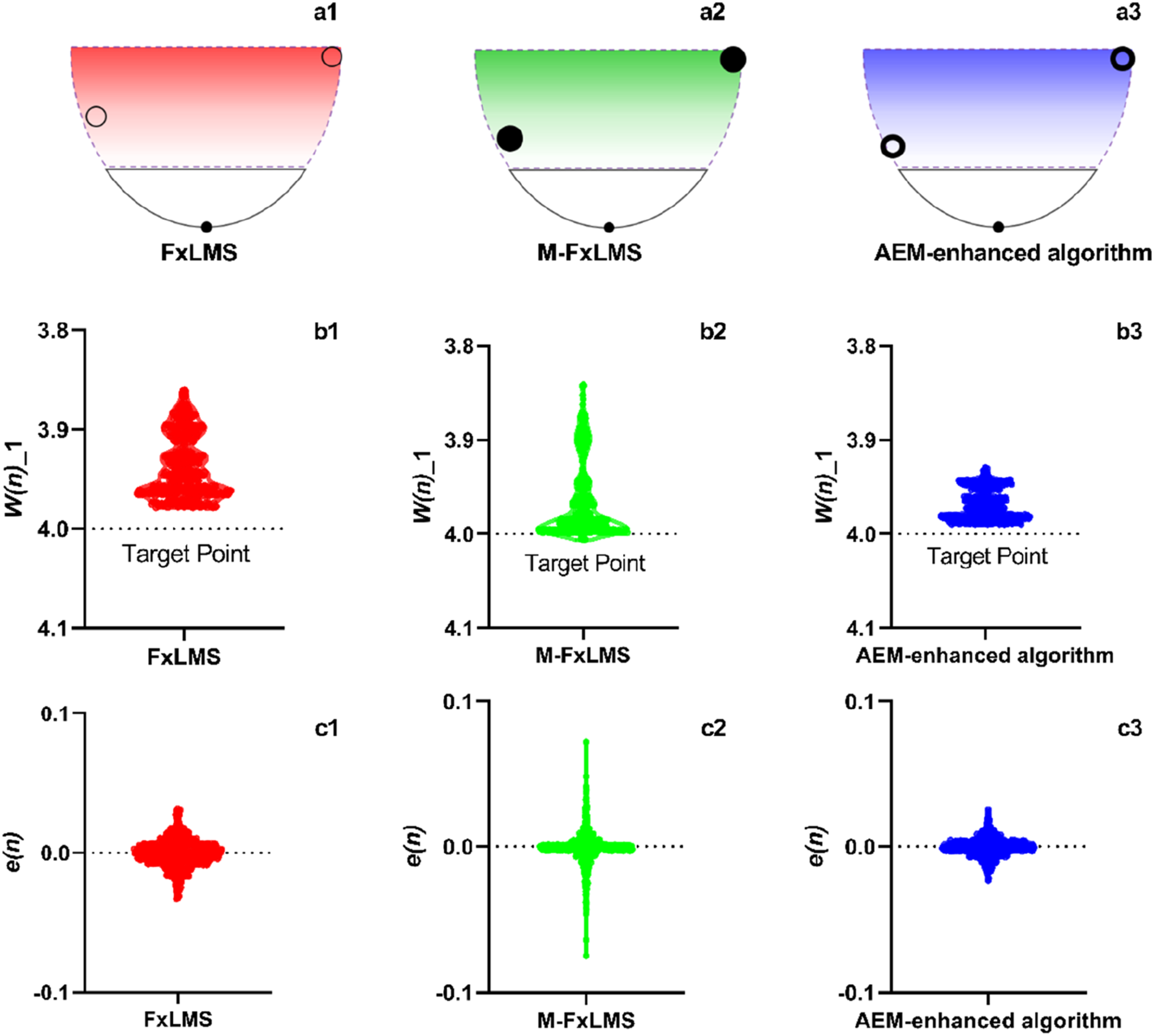
In the final stage of the iteration, illustrated in Figure 6, it becomes evident that while M-FxLMS (b2) displays a greater oscillation amplitude in contrast to FxLMS (b1), its track point distribution is predominantly focused around the optimal weight coefficient. Conversely, FxLMS (b1) exhibits a more concentrated track point distribution, albeit positioned farther from the optimal weight coefficient. This disparity results in a broader distribution of iteration errors, as demonstrated by the comparison between c2 and c1. Compared to M-FxLMS (b2), the AEM-enhanced algorithm (b3) exhibits a concentrated distribution of track points with reduced oscillation. In contrast to FxLMS (b1), the track points are notably closer to the optimal weight coefficient. This behavior is primarily attributed to the fact that in the final phase of iteration, the gradient of the loss function experiences a less abrupt change due to the minor variation in residual error. The FxLMS algorithm, lacking consideration for inertia, mistakenly assumes it has attained the optimal point. Nevertheless, as the residual error has not yet met the convergence threshold, the iteration process persists instead of halting, leading to continued iterations around this point. Conversely, when the M-FxLMS algorithm approaches the optimal point, the inertia’s presence induces a gradual oscillation in the iterative trajectory around the optimal point. Nevertheless, its convergence surpasses that of the FxLMS algorithm. The AEM-enhanced algorithm proposed in this paper clip and splices the two algorithms by setting the switching coefficient
The simulation of robust performance against impulse signals
To assess the AEM’s resilience against impulse signals, a 256-order FIR filter for constructing the adaptive filter vector Primary and secondary path transfer functions.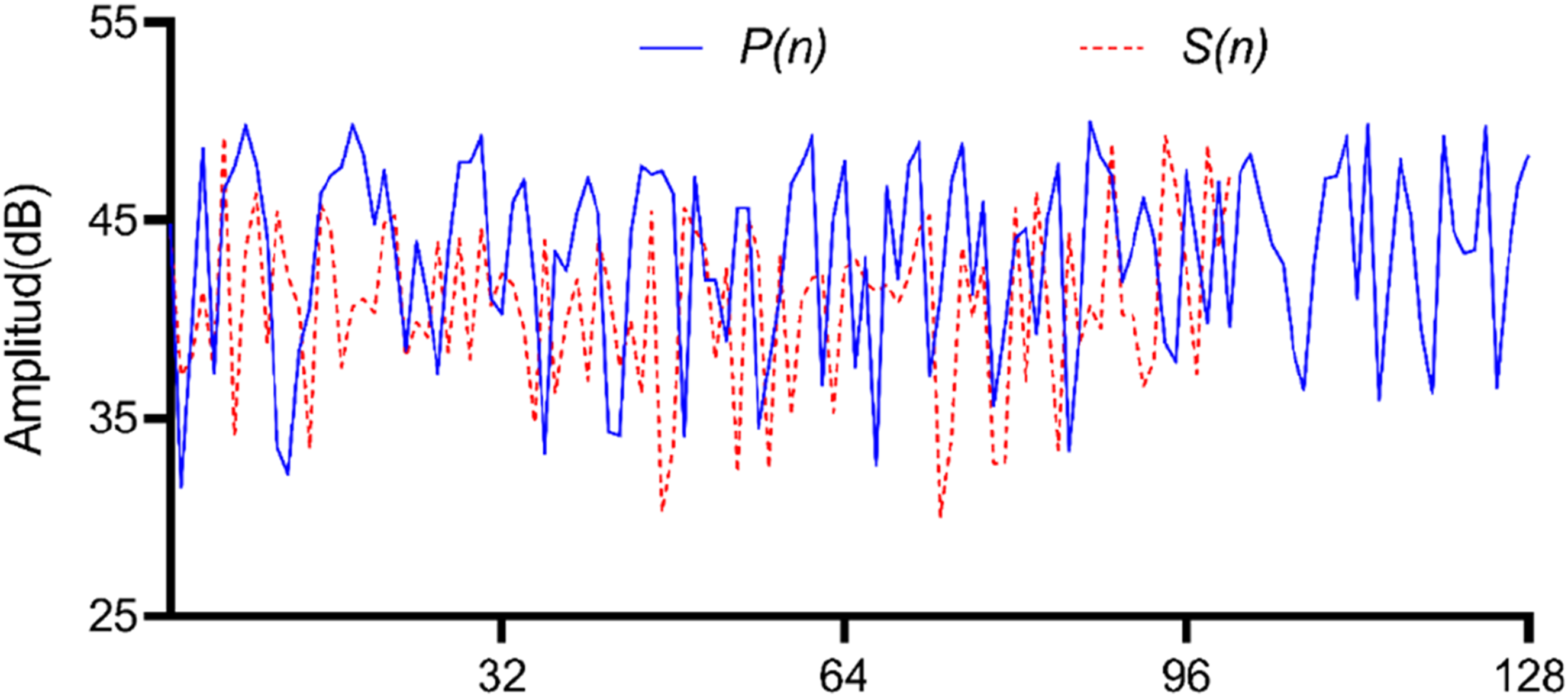
Parameter settings for simulation.

Case I: Impulse robustness for reference signals
Simulation results for case I.

Iteration process of case I. (a) the reference signal (b) the residual error signal.
The findings lead to several key observations. (i) Akhtar’s model demonstrates superior convergence speed when compared to Sun’s model and the AEM-enhanced model exhibits a 74% increase in convergence speed compared to Sun’s model and a 1.5% improvement over Akhtar’s model. (ii) In a stable operational state, both the AEM-enhanced model and Akhtar’s model demonstrate an adeptness in mitigating the impact of impulsive noise within the reference signal. This capability stems from the simultaneous processing of the reference signal
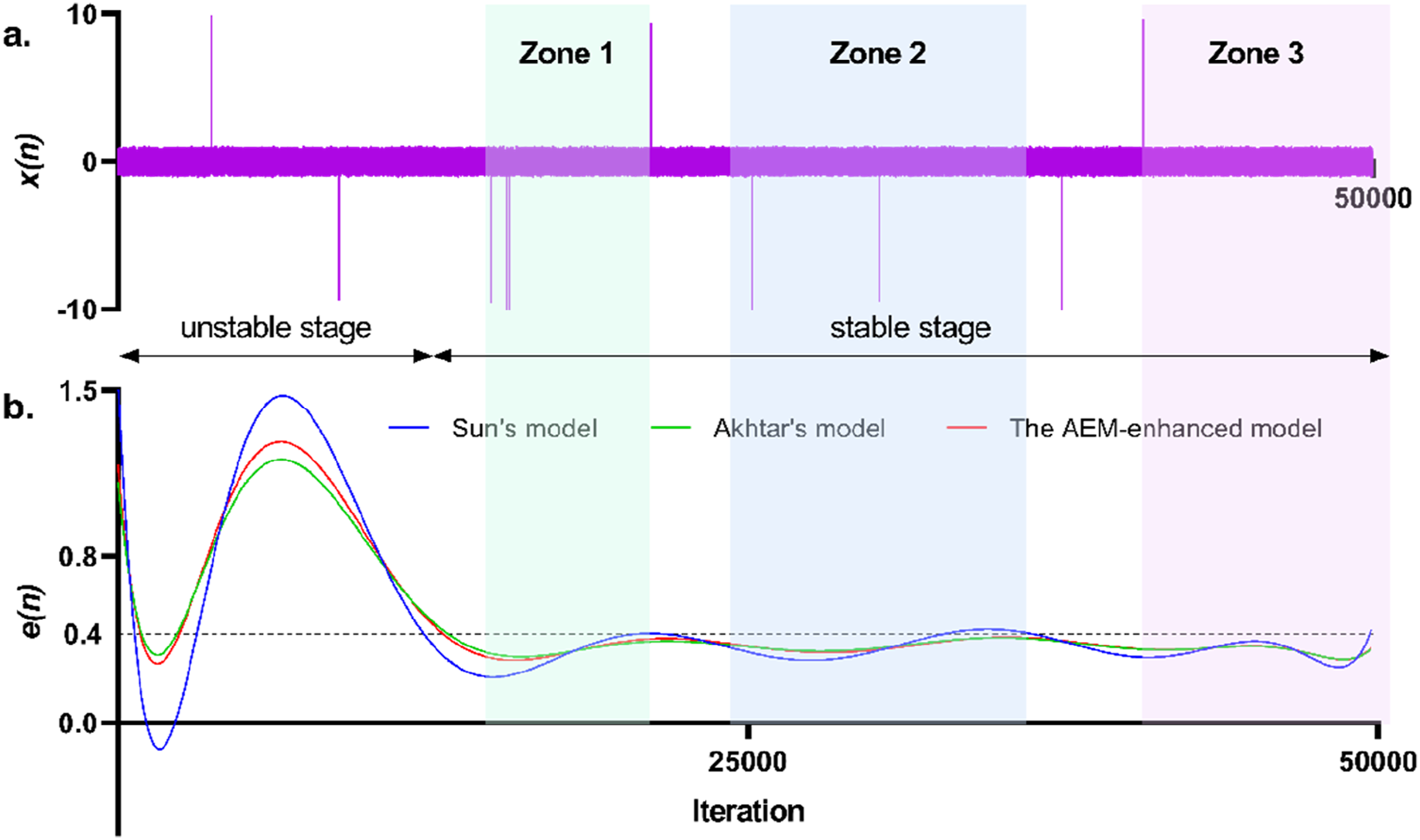
Case II: Impulse robustness for system signals
Simulation results for case II.

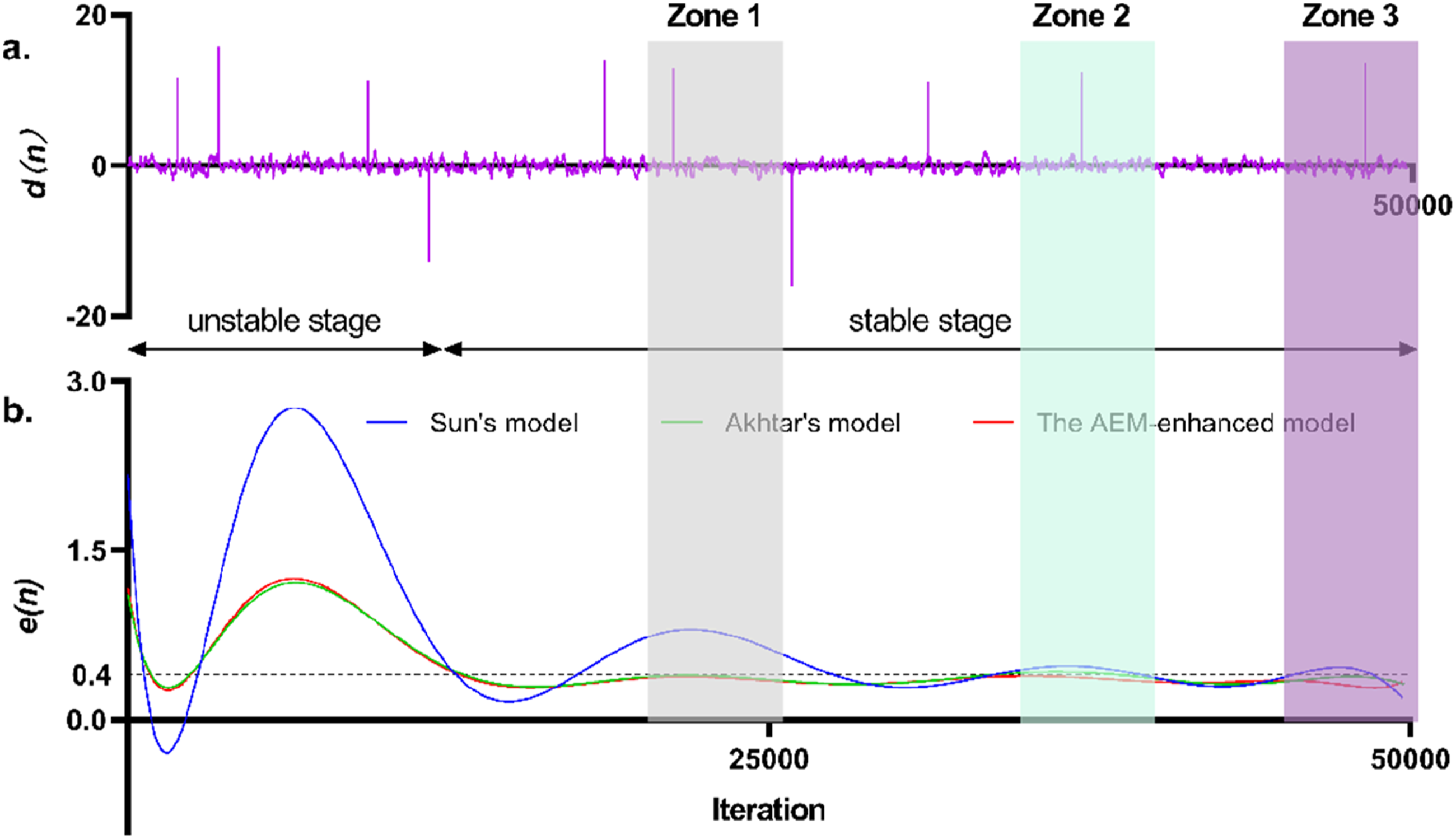
Iteration process of case II. (a) the primary noise signal (b) the residual error signal.
The outcomes lead to several key observations. (i) Both Sun’s and Akhtar’s models display distinct responses to system impact. In contrast, the AEM-enhanced model showcases a 73% and 66% surge in convergence speed, respectively, when compared to Sun’s and Akhtar’s models. This performance enhancement can be primarily attributed to the AEM-enhanced model’s adoption of the algorithm editing method. This method proficiently isolates the impact signal and its associated components, harmonizing the iterative process before and after. Consequently, it ensures steadfast performance in the face of diverse impact scenarios, substantiating its robustness against impacts of varying nature. (ii) In Figure 9(b), it is apparent that Sun’s model exhibits more pronounced oscillations and heightened sensitivity to impact during the stable stage, in contrast to the AEM-enhanced model. The primary reason is its failure to process the residual signal upon impact detection. (iii) When detecting an impact signal, Akhtar’s model simultaneously processes both the impact signal and the residual signal, leading to superior impact resistance performance compared to Sun’s model. Nevertheless, in the later stages of iteration, Akhtar’s model exhibits heightened sensitivity to impulse signals, as illustrated in zones two and three of Figure 9. Both impacts lead the system to exceed the convergence threshold. This concern is non-existent in the AEM-enhanced model. The key reason lies in Akhtar’s model utilizing a global statistical approach to determine the threshold value of the impulse signal. Specifically, in condition non-impulse, the model identifies the signal’s highest peak value, multiplies it by the threshold coefficient, and employs this as an alternative value. To mitigate the impact of the system’s impulse signal, when an impulse is detected, the alternate value is used to replace the actual impulse signal during iteration. Obviously, this method is well-suited for scenarios marked by a generally stable iteration process. However, it may face challenges in instances of significant fluctuation during unstable stages, potentially resulting in an excessively high setting of the alternative value, rendering it less effective in mitigating impulses in stable stages. In contrast, the AEM-enhanced model employs an algorithm editing method to directly eliminate the impulse signal, as opposed to substitution. This approach fosters a consistently stable convergence performance.
Verification test of the algorithm editing method (AEM)
In order to validate the practical application of AEM for improving algorithm performance, a single-input single-output ANC test system is implemented, illustrated in Figure 10. Employed as the control hardware is the dSPACE MicroAutoBox. The system and algorithmic parameters adhere to the specifications provided in Section 3.2. The testbench of ANC system.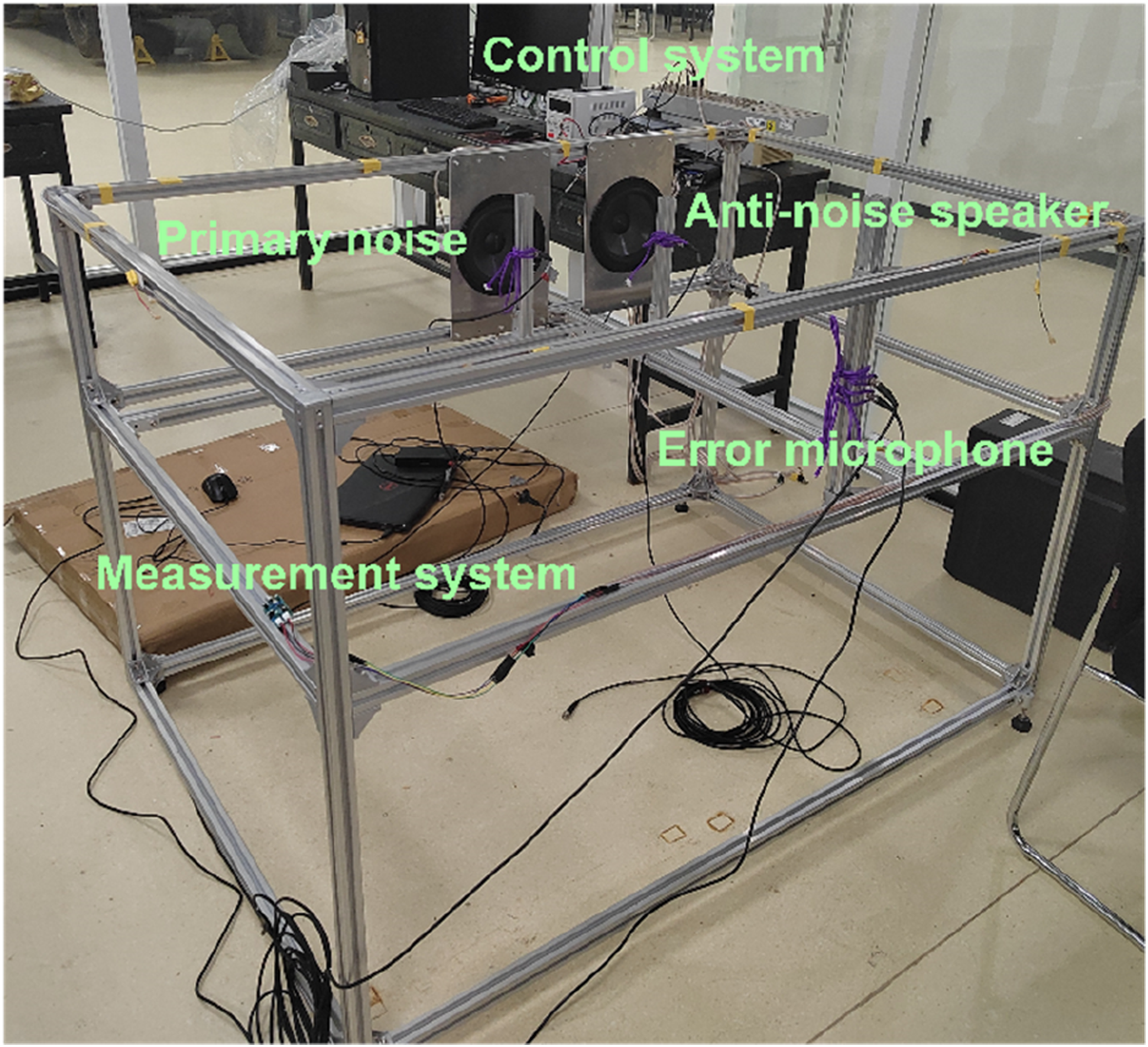
The convergence performance verification
Test parameters for convergence performance verification.

The test results are presented in Figure 11. (i) The AEM-enhanced algorithm demonstrates the most effective noise reduction, achieving approximately 12 dB under full convergence. The M-FxLMS algorithm follows with around 10 dB of noise reduction, and the FxLMS algorithm provides about 8 dB of noise reduction. These results align with the findings from the theoretical and simulation analyses above. (ii) In terms of convergence speed, the AEM-enhanced algorithm demonstrates the swiftest stabilization, achieving it in about 1.3 seconds. The M-FxLMS algorithm requires roughly 1.6 seconds to reach stability, while the FxLMS algorithm takes approximately 2.2 seconds, consistent with the earlier analysis. Noise attenuation results of various algorithms.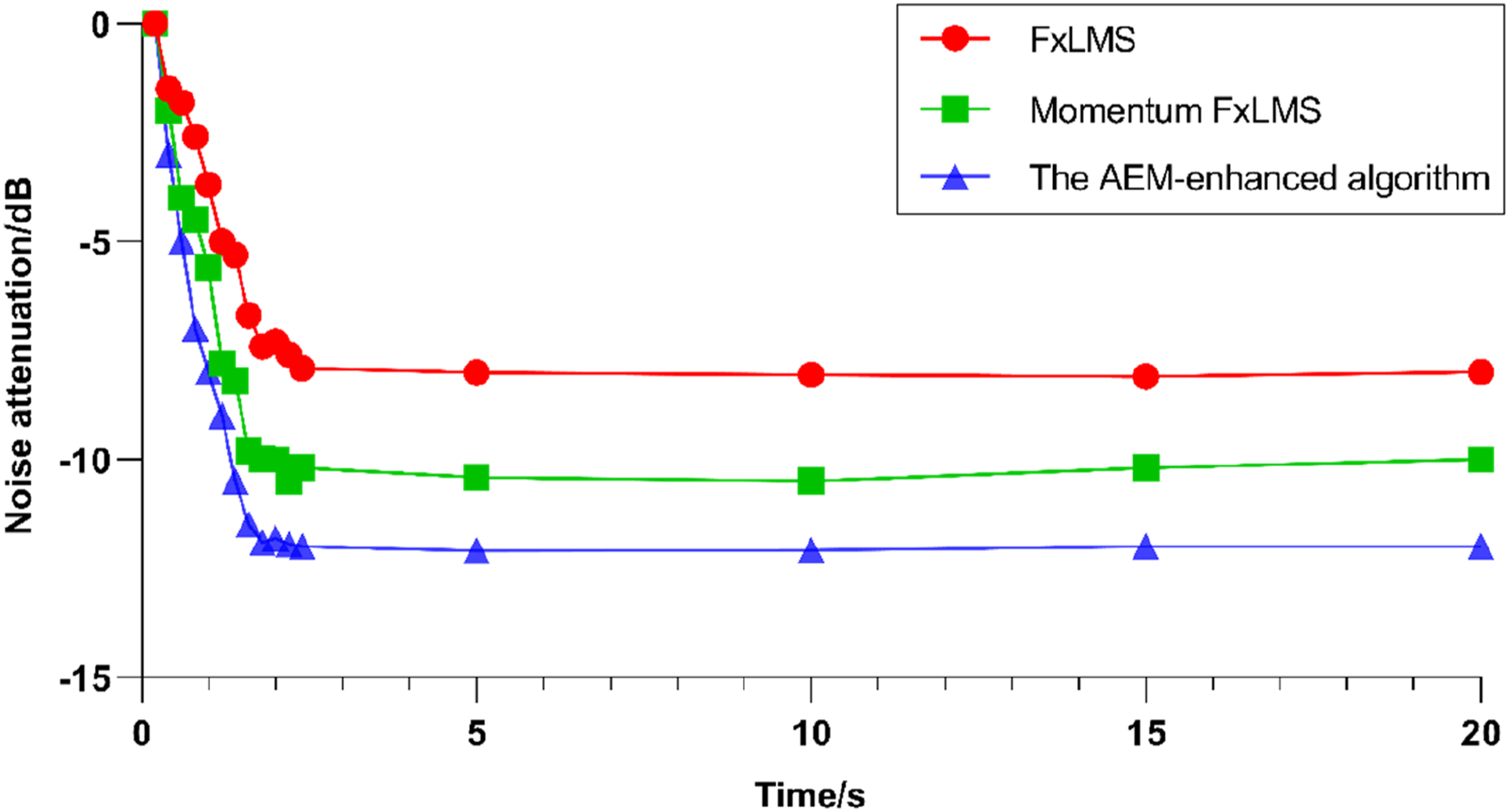
The impulse robustness performance verification
To assess the robustness of AEM against system impulses, eight vigorous claps are generated near the residual microphone in a stable state of operation for the ANC system, simulating a system impulse. The time-domain signal of sound pressure at the controlled position is then recorded during this process for evaluating noise reduction effectiveness.
The test results are presented in Figure 12. (i) The findings indicate that the AEM-enhanced model showcases the most robust resistance to impulses, followed by Akhtar’s model, while Sun’s model displays the least favorable performance. These outcomes are consistent with the conclusions derived from the earlier simulation and theoretical analyses. (ii) In Sun’s model, when subjected to periods of dense impacts (the first five claps), its self-correction capacity diminishes, resulting in reduced noise reduction. This deficiency primarily arises from the model’s inability to rectify the residual signal in response to the impact, leading to the swift accumulation of system errors. Conversely, in instances of sparser impacts (the last three high-fives), there exists sufficient time for error correction, culminating in enhanced noise reduction performance. (iii) The noise reduction performance of Akhtar’s model closely approximates that of the AEM-enhanced model. However, it lacks noise reduction effectiveness for specific impacts, such as the 1st, 2nd, 7th, and 8th claps. This deficiency is especially evident during the 7th and 8th claps, where the loudspeaker emits a distinctive sharp whistling sound. This issue stems from the anti-impact strategy employed in this model, which results in the accumulation of system errors and a tendency towards instability in the later stages of iteration. Noise attenuation results for impulse robustness verification.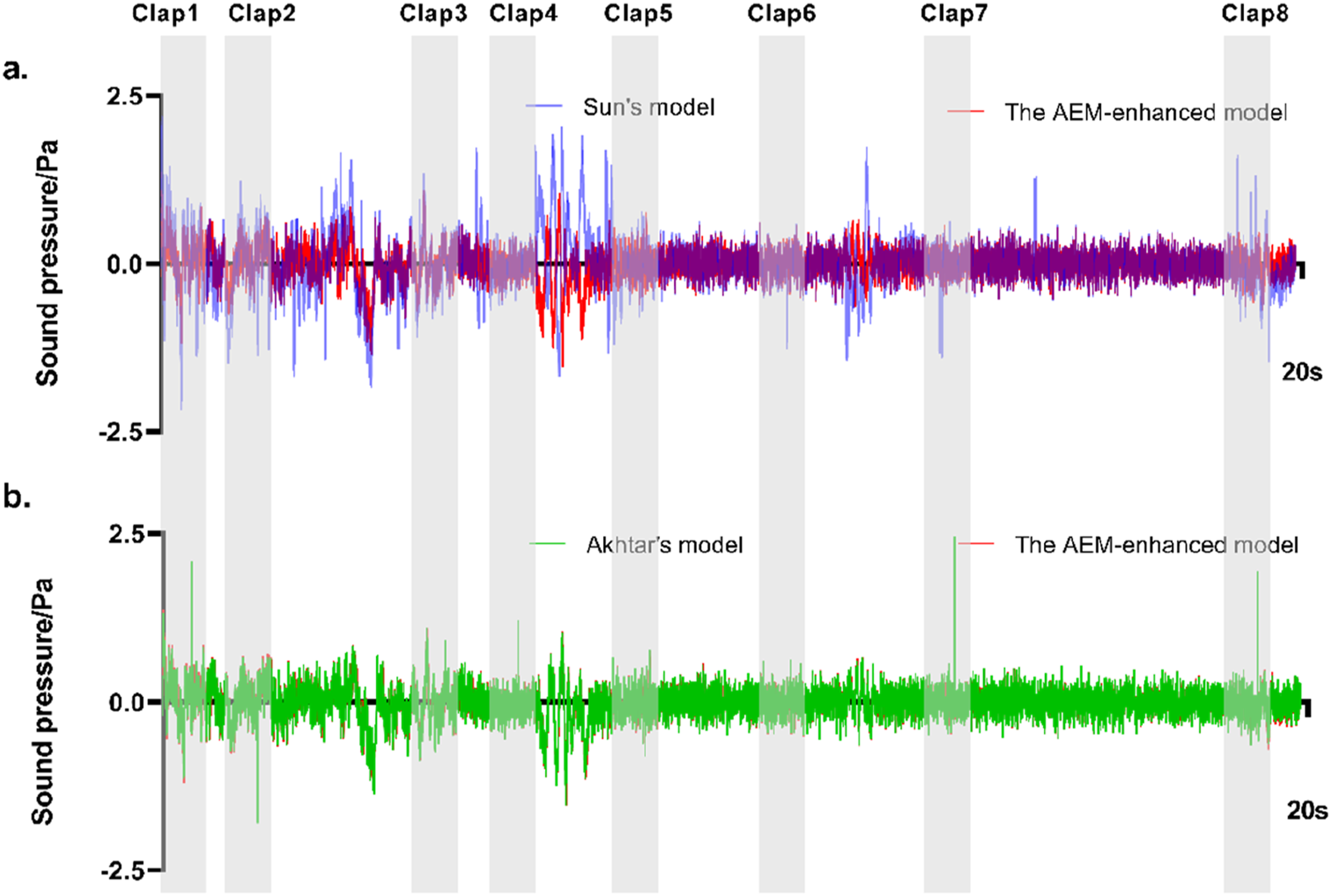
Conclusion
In this study, we propose integrating an Algorithm Editing Method (AEM) into the active noise control system. AEM leverages the distinct characteristics of varied algorithms to enable precise “cutting” and “splicing” of algorithms, tailored to specific iteration stages. The aim is to achieve a balance between convergence rate, stability, and computational efficiency. The effectiveness of AEM is verified using two algorithms: FxLMS and M-FxLMS. The inclusion of the switching coefficient as a trigger condition enables algorithmic splicing and editing that is customized to various iteration stages. Results indicate that, with identical convergence criteria, the AEM-enhanced algorithm accomplishes a considerably faster convergence. When compared to the FxLMS and M-FxLMS algorithms, this algorithm shows respective improvements in convergence speed of 26.7% and 12.8%, without any additional computational complexity. Additionally, the Algorithm Editing Method (AEM) is utilized in this study to enhance the anti-impulse capabilities of the algorithms. The study shows that the AEM-enhanced model exhibits better impulse robustness when compared to Sun’s and Akhtar’s models. Additionally, it has a significant advantage in limiting the impact of system signals.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was partially supported by Henan Provincial Science and Technology Tackling Project (No.242102241054). It is also supported by Scientific Research Start-up Fund for High-level Talents of Henan Institute of Technology (No.XJ2023000903)