
Abstract
Accurate model of secondary paths is very crucial for the multi-channel filtered-X least mean square algorithm applied in adaptive active noise control system. The auxiliary random noise technique is popular for online secondary path modeling during adaptive active noise control operation. This paper proposes a simplified variable step-size strategy and an effective auxiliary noise power scheduling strategy for the multi-channel filtered-X least mean square algorithm. Through a defined indirect error signal, the proposed method can guarantee every online secondary path modeling filter has its own exclusive variable step-size strategy to update their coefficients, and every injected noise has its own exclusive scheduling strategy considering all of the corresponding online secondary path modeling filters. The proposed method can improve the adaptive performance and simplifies the complexity of multi-channel adaptive active noise control system. Computer simulations show that the proposed method gives much better noise reduction and secondary path modeling accuracy at a somewhat faster convergence rate comparing with the competing methods.
Keywords
Introduction
The filtered-X least mean square (FXLMS) algorithm is very popularly applied in adaptive active noise control (AANC) system. The FXLMS algorithm requires its reference signal to be filtered by secondary path which leads from the controller to the error sensor.1,2 Therefore, the accuracy of the secondary path transfer function has significant influence upon the performance of the AANC system. Effect of secondary path modeling error on the performance of FXLMS algorithm has been studied in Chen et al. 3 and Chan and Chu. 4 It has been shown that fast and precise secondary path model is very important for the AANC system equipped with the FXLMS algorithm. However, the secondary path is usually time varying or nonlinear, implying that online secondary path modeling (OSPM) is required to track such changes and ensure the convergence, stability, and accuracy of AANC system.
In many practical situations, multiple secondary sound sources and error sensors are needed to enlarge the noise reduction space and increase the noise reduction. So, a multi-channel AANC system is essential. In these cases, computational complexity of multi-channel AANC system with OSPM is larger than that of a single channel system due to the increase in the number of secondary paths. In order to reduce the computational complexity, some simplified multi-channel FXLMS algorithm had been developed in Douglas 5 and Das et al. 6 Since the main objective of this paper is to propose an effective OSPM method for multi-channel AANC system, all the control methods mentioned in this paper are based on standard multi-channel FXLMS algorithm.
One of the popular OSPM methods was proposed by Eriksson and Allie 7 in which an internally generated random noise (called auxiliary noise) is used as an excitation signal for the OSPM filter. The auxiliary noise is injected into the secondary path for modeling, exciting the secondary path, and observing its response. However, in Eriksson’s method, the ideal error signal becomes an interference for the OSPM filter, and the auxiliary random noise becomes an interference for the active control filter. Another fatal defect of the auxiliary random noise technique is that a large auxiliary noise will increase the residual noise greatly, and thus deteriorate the noise reduction, even though it can lead to a quick acquisition of accurate secondary path estimation. So, an auxiliary noise power scheduling (ANPS) strategy is necessary to obtain an accurate secondary path model and reduce the influence of auxiliary noise to the residual noise.
The improvements of the Eriksson’s method have been put forward in Zhang et al.,8,9 Akhtar et al.,10,11 Pu et al., 12 and Carini and Malatini 13 and summed up by Kajikawa et al. 14 Among them, the methods given by Zhang et al.8,9 proposed a parallel online modeling algorithm using three adaptive filters with a delay unit in the output port of the primary path. Zhang’s methods gave a new desired signal for OSPM filter, avoiding the interference between the active control process and secondary path modeling process, so the OSPM filter can converge rapidly. Akhtar et al. 10 used a same error signal to update the active control filter and the OSPM filter, and employed variable step-size (VSS) strategy to increase the modeling accuracy and improve system convergence, employed an ANPS strategy to decrease the auxiliary noise power after the control system stabilizes. Carini and Malatini 13 proposed an optimal VSS strategy with ANPS strategy based on delay coefficient technique. He delayed D samples of the auxiliary signal and used the instantaneous value of the first D delay coefficients to estimate the system distance. However, in order to obtain the system distance, the length of OSPM filter had to be increased by D which is equivalent to introduce another adaptive filter. In Pu et al.’s 15 method, the VSS strategy and ANPS strategy are calculated only by procedure parameters available directly. There is no need of any experience parameter before the control system starts to work without increasing the computational complexity. Paulo and José 16 proposed an ANPS strategy based on a variable power ratio which is low when no noise cancelation occurs and high when noise reduction is being performed. Ahmed et al. 17 proposed a complex and refined power scheduling algorithm with two stages judged by the ratio between powers of error signal and reference signal.
However, most of the researches on OSPM are for single channel control system and few for multi-channel AANC system. Akhtar et al. 10 extended their previous work and proposed a multi-channel VSS OSPM method. Jung et al. 18 extended Akhtar’s ANPS strategy to multi-channel system directly. In this paper, we propose a new indirect error signal. Based on the error signal, a simplified VSS strategy and an effective ANPS strategy for multi-channel AANC system are proposed. The proposed method guarantees that every OSPM filter has its own exclusive VSS strategy, and every injected auxiliary noise has its own exclusive ANPS strategy. The proposed method can effectively improve the convergence performance of multi-channel AANC algorithm.
The organization of this paper is as follows: the next section gives a brief overview of the existing multi-channel OSPM methods. “The proposed OSPM method for multi-channel AANC system” section proposes a new OSPM method with VSS strategy and ANPS strategy for multi-channel AANC system and gives a computational complexity analysis of the proposed method. “Simulation results and analysis” section presents a series of simulation experiments to compare the performance of the proposed method with existing OSPM methods. The final section concludes the paper.
The existing OSPM methods for multi-channel AANC system
Multi-channel AANC system with OSPM
A multi-channel (I × J×K) AANC system with I reference inputs, J secondary sources, and K error sensors is employed for mathematical descriptions and theoretical analysis, whereas, for clarity of presentation, the block diagram will be drawn for 1 × 2 × 2 AANC system. The block diagram of multi-channel OSPM algorithm (1 × 2 × 2) is shown in Figure 1.
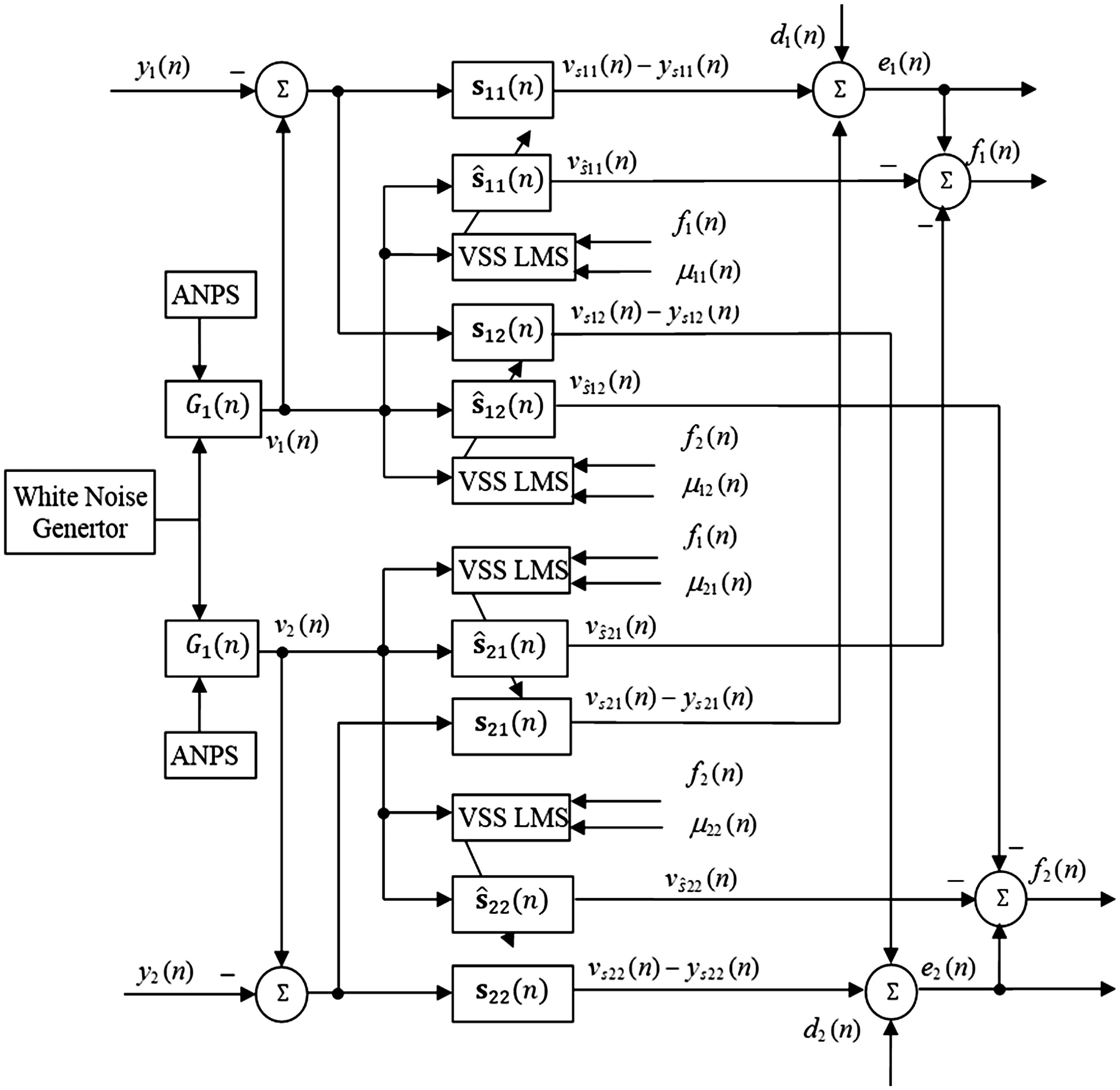
Block diagram of multi-channel OSPM algorithm (1 × 2 × 2). ANPS: auxiliary noise power scheduling; LMS: least mean square ; VSS: variable step size.
There are J × K secondary paths between J secondary sources and K error sensors for multi-channel AANC system.




The weight update equations for the active controllers and the OSPM filters are given by


The existing multi-channel ANC system with OSPM
Ahktar et al.
10
proposed a practical VSS strategy, the basic idea of VSS stems from the fact that the interference in the desired response of the modeling filter is decreasing with the convergence of the active control system, (ideally) converging to zero. Hence a small step size is used initially and later its value is increased accordingly. Ahktar’s VSS strategy for multi-channel OSPM is calculated by a power ratio


Jung’s ANPS strategy for multi-channel OSPM is also calculated by the power ratio

Different secondary paths
Then, we extend Carini’s VSS strategy and ANPS strategy for a single OSPM channel control system to multi-channel system (named extended-Carini’s method). The modeling error estimate of the extended-Carini’s method is calculated as

The VSS strategy of the extended-Carini’s method is given as

The ANPS strategy of extended-Carini’s method is given as

In extended-Carini’s method, the VSS strategy ensures every OSPM filter a different step size. However, in order to obtain the modeling error
The proposed OSPM method for multi-channel AANC system
The proposed VSS strategy for multi-channel OSPM

Here, we define


From equation (13), we see that
Due to the presence of a strong disturbance from

The step size μs(n) varies adaptively in accordance with the ratio between the power of auxiliary noise v(n) and that of residual signal e(n). Here, we extend the VSS strategy to multi-channel OSPM


The signal vj(n) is uncorrelated with dk(n) and yj(n). So the ratio

Initially at n = 0, when the AANC system is started, the control signals are zero, and hence the ratio

Here, all of


Here, we replace

At the start-up of the AANC system, due to the initial values of

Comparing equations (20) and (24), it can be found that
Replacing

From equation (25), it can be seen that
The proposed ANPS strategy for multi-channel OSPM
To reduce the influence of auxiliary noise to the residual noise, an ANPS strategy was proposed in Pu et al.
15
to reduce the harmful contribution in single channel AANC system. In Pu et al.,
15
G(n) varies adaptively in accordance with the ratio between the powers of e(n) to f(n). Here, we directly extend the ANPS strategy to multi-channel OSPM, and replace

Further derivation of the ratio

At the start-up of the AANC system,

The value of

Similar to the above discussion, at the start-up of the AANC system,

As all OSPM filters associated with the jth secondary source come to converge, that means all
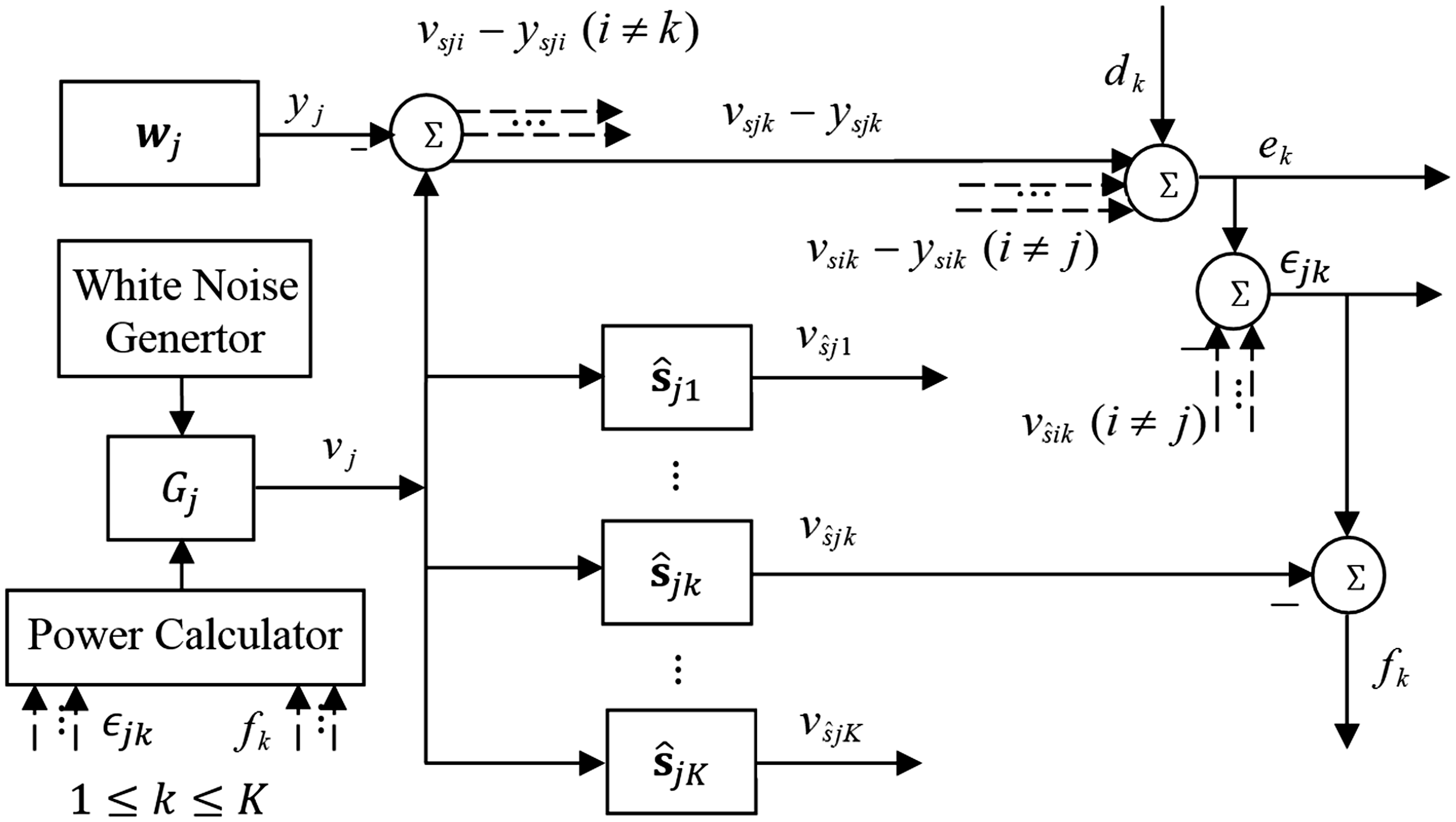
Block diagram of auxiliary noise scheduling strategy.
Calculation analysis and comparison
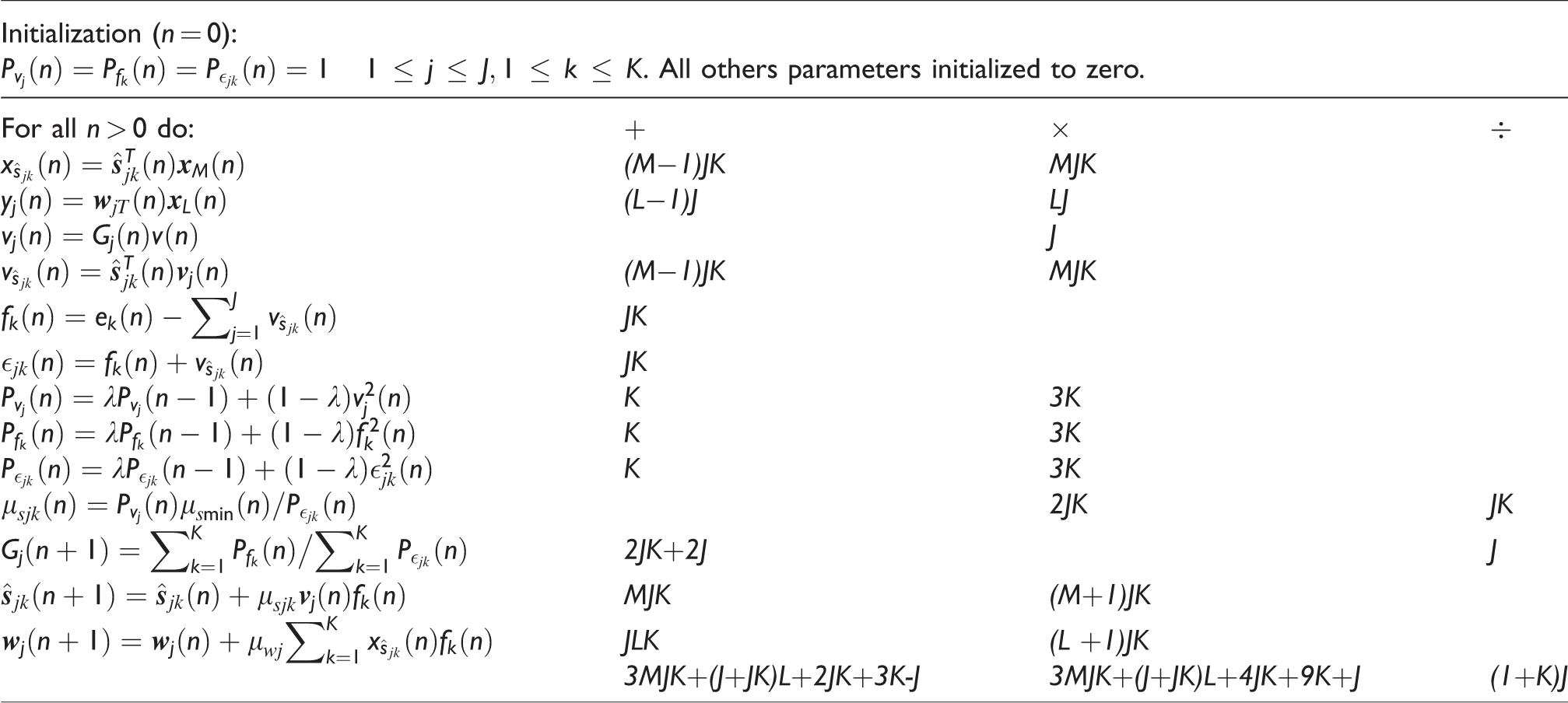
Table 1 summarizes the proposed VSS strategy and ANPS strategy for multi-channel AANC system equipped with OSPM. The computation complexity is normally determined by the number of computations required per iteration of the algorithm. 11 A detailed computational complexity analysis of the proposed method is provided in Table 1.
Analysis of computational complexity of the proposed algorithm.
A detailed computational complexity comparison between the proposed method with the extended-Eriksson’s, Akhtar–Jung’s, and extend-Carini’s methods is given in Table 2. The extended-Carini’s method has the highest computational cost comparing with the other methods due to the using the delay coefficient technique. That is because the using the delay coefficient technique for online estimation error of the secondary path. The extended-Eriksson’s method has the lowest computation, because it is the basic OSPM method in which fixed step sizes are employed for both active control filters and OSPM filters, and no ANPS strategy is employed. The proposed method and the Ahktar–Jung’s method have the lower computational cost comparing with the extended-Carini’s method, because the simple ANPS strategy and VSS strategy are employed for the iteration of the OSPM filters.
Comparison of computational complexity of 1×J × K ANC system with OSPM.

OSPM: online secondary path modeling.
Simulation results and analysis
In this section, we provide a series of simulation experiments on multi-channel AANC system, comparing the performance of the proposed multi-channel OSPM algorithm with multi-channel offline SPM method, the extended-Carini’s OSPM method, 13 and Akhtar–Jung’s OSPM method.10,18 In Case 1 and Case 2, the number of secondary sources and error sensors is equal, while in Case 3, they are not.
The length of active control filters L is 128, and the length of OSPM filters M is 64 in all methods including
The magnitude responses of the primary paths used in simulation experiments are shown in Figure 3. Primary path 1 and 2 are used in Case 1 and Case 2 in 1 × 2 × 2 multi-channel AANC system, and then combined with primary path 3 are used in Case 3 in 1 × 2 × 3 multi-channel AANC system.
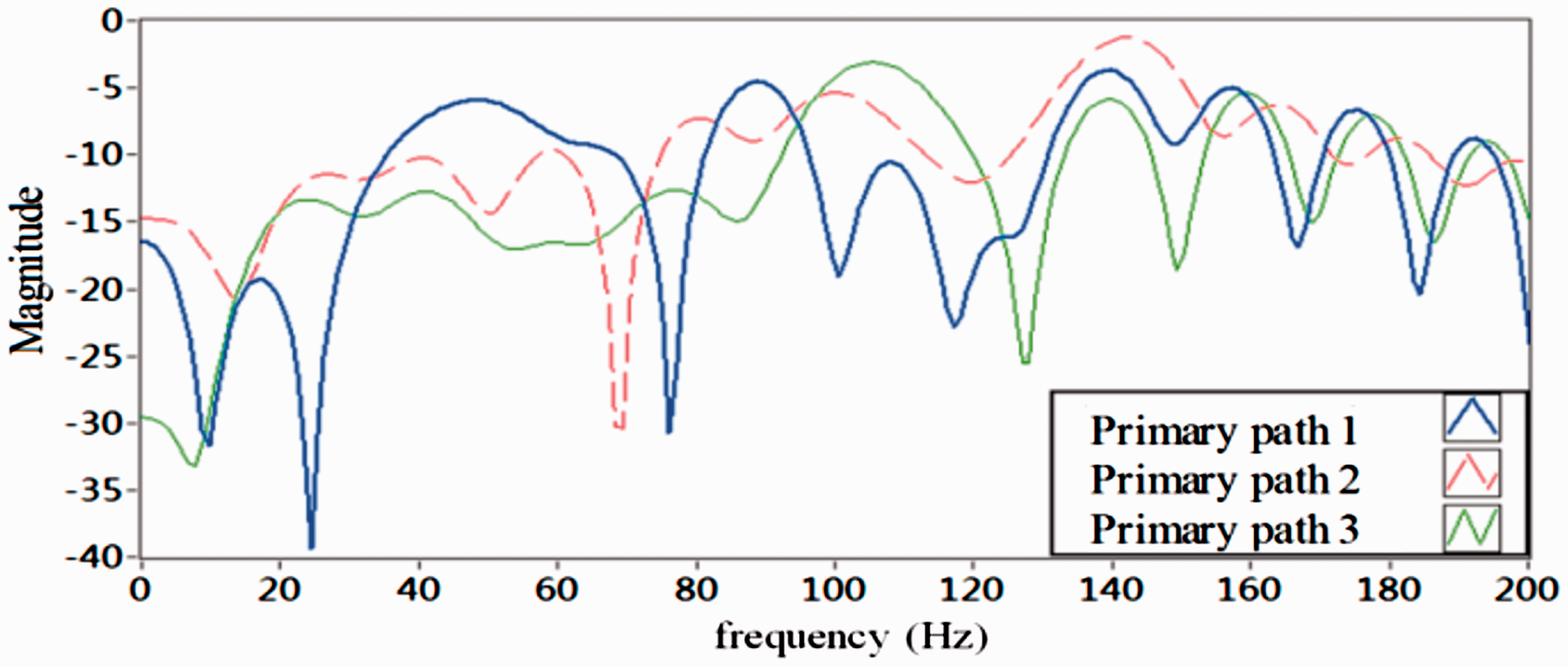
Magnitude responses of primary noise paths.
In practical applications, significant changes in acoustic paths may be encountered due to the movement of secondary sources or error sensors. A sudden change in the acoustic paths is set at n = 40,000 in all three simulation experiments. Magnitude responses of original and changed secondary paths are shown in Figure 4. Figure 4(a) and (b) about magnitude response of
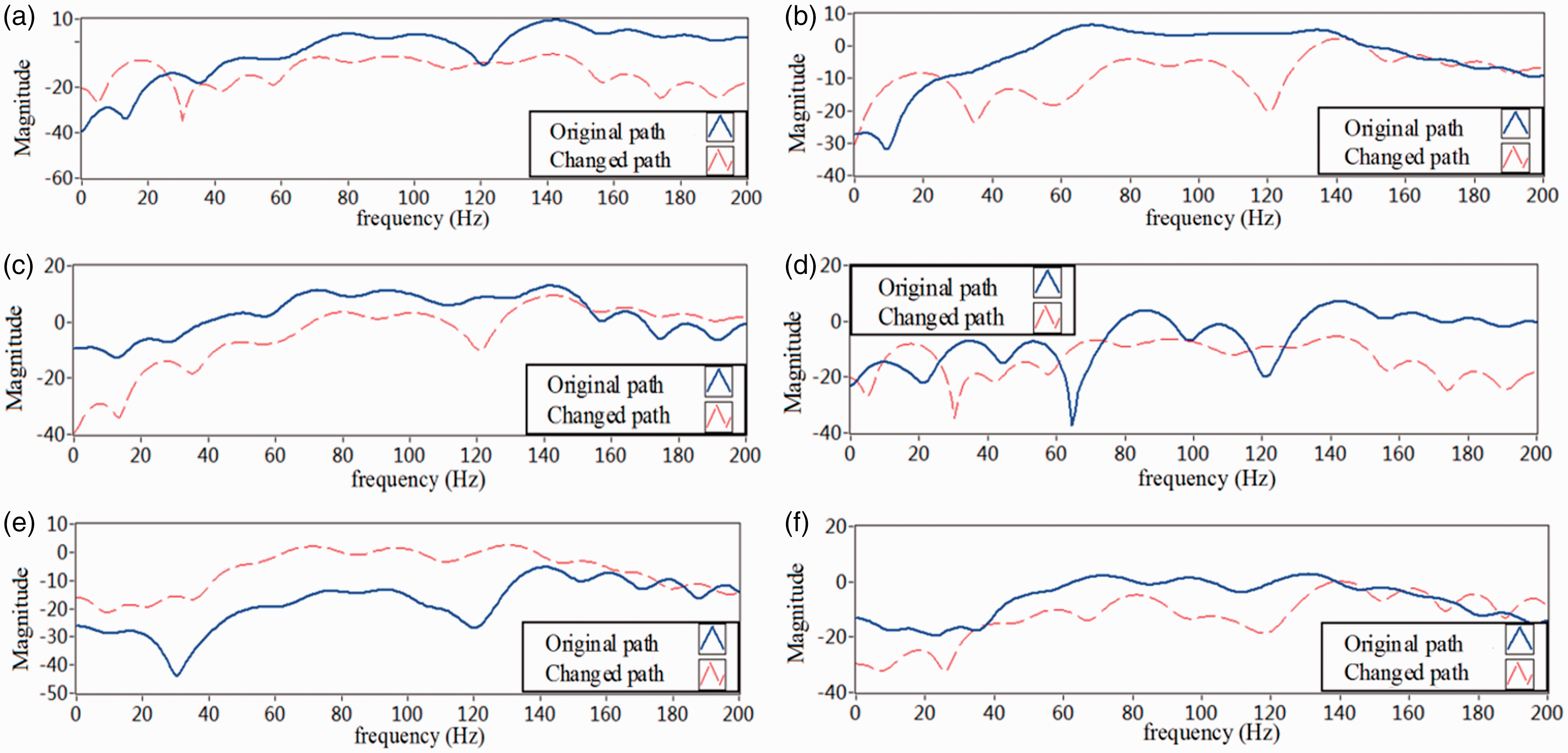
Magnitude responses of secondary paths (solid line: original path, dashed line: changed path at n = 40,000): (a)
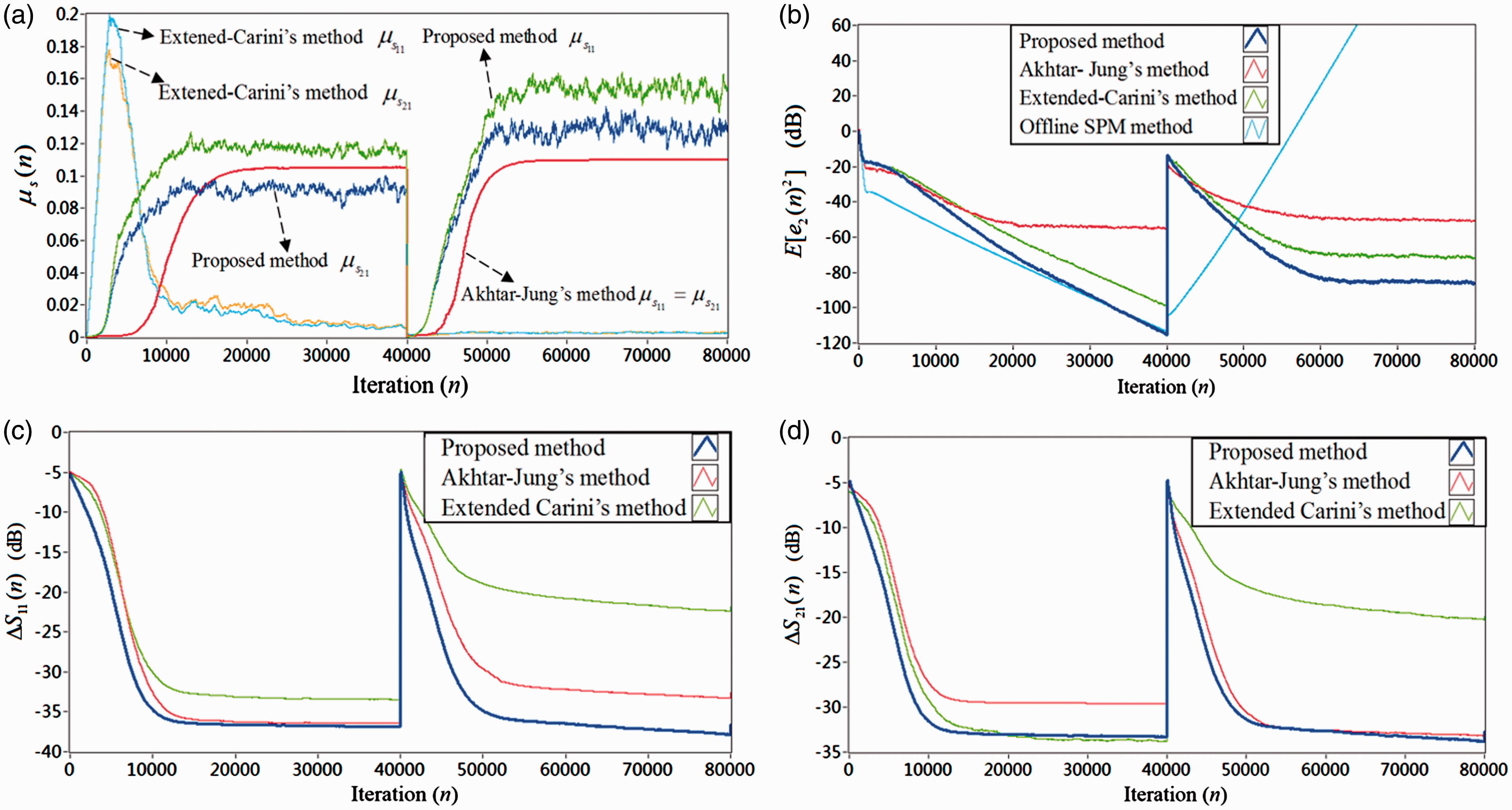
Simulation results in Case 1. (a) Step size
To quantify performance of OSPM filters, the relative modeling error of OSPM filters is defined

Case 1: 1 × 2 × 2 multi-channel AANC system for tonal noise
In this case, x(n) is a sine signal with frequency of 90 Hz and amplitude of 2, corrupted with a white noise resulting in a SNR of 30 dB. A zero-mean white Gaussian noise of variance 1 is used for OSPM. The simulation parameters for all methods are set as described in Table 3.
Simulation parameters for the four methods.

SPM: secondary path modeling.
The step-size curves for OSPM filters associated with the error sensor 1 are shown in Figure 5(a). Different OSPM filters have different step-size curves before and after the acoustic paths change in the proposed method and the extended-Carini’s method. But in Akhtar’s method, the step sizes for
In Figure 5(b), the mean-squared error
The relative modeling errors ΔS11(n) and ΔS21(n) are shown in Figure 5(c) and (d). It can be seen that the proposed method can reduce the modeling error to a lower steady-state value at a somewhat faster convergence speed before and after the acoustic paths change. Due to the step sizes frozen to small values after the acoustic paths change, the convergence of the OSPM filters in Carini’s method is very slow and ΔS11(n) and ΔS21(n) are relatively high.
Case 2: 1 × 2 × 2 multi-channel AANC system for broad band noise
In this case, the reference signal is a broadband signal obtained by filtering a zero-mean white Gaussian noise with bandpass filter having pass-band 100–400 Hz. The variance of the reference signal is adjusted to 2. A zero-mean white Gaussian noise of variance 1 is used for the secondary path modeling. The sampling frequency is 1 kHz. The simulation parameters for all methods are set as described in Table 4.
Simulation parameters for the four methods.

SPM: secondary path modeling.
Similar to the Case 1, the proposed method has better performance than the competing methods in dealing with broad band noise. The variation charts of the step sizes are shown in Figure 6(a). The proposed VSS strategy enables every OSPM filter to have a unique step size, matched with the proposed ANPS strategy, leading to a high noise reduction performance in dealing with the broadband noise. The mean-squared error
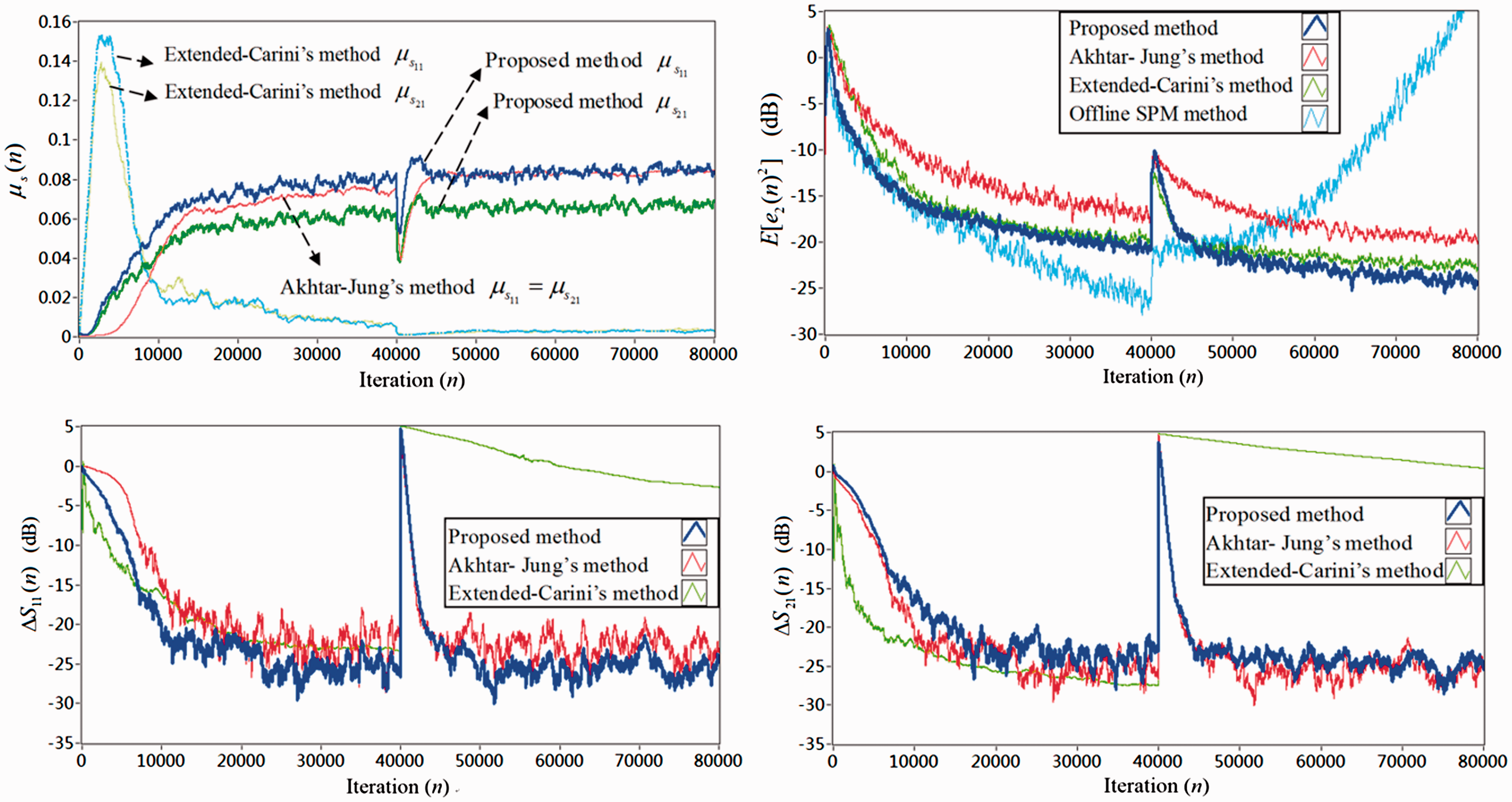
Simulation results in Case 2. (a) Step size
The relative modeling error ΔS11(n) and ΔS21(n) are shown in Figure 6(c) and (d). All these methods can reduce the modeling error to a lower steady level at reasonably faster convergence rate before the acoustic path change. However, after the change, the ability to re-model secondary paths is limited in extended-Carini’s method.
Case 3: 1 × 2 × 3 multi-channel AANC system
Akhtar–Jung’s method only works if the numbers of secondary sources and error sensors of multi-channel AANC system are same, while the extended-Carini’s method and the proposed method have no such limitation. In this case, numbers of secondary sources and error sensors are set to not equal to demonstrate the advantage of proposed method for multi-channel AANC system. The simulation parameters are set to the same as in Case 1.
The simulation results are shown in Figure 7(a) to (d), every OSPM filter has its own exclusive VSS strategy using the proposed method and the extended-Carini’s method. However, with the extended-Carini’s method, the convergence of the OSPM filters is slower, and the relative modeling errors of different OSPM filters are larger after the acoustic paths change comparing with the proposed method. Both the proposed method and the extended-Carini’s method have a high noise reduction performance even though the number of secondary sources and error sensors is not equal. But the proposed method performs better than the extended-Carini’s method at much reduced computational cost.
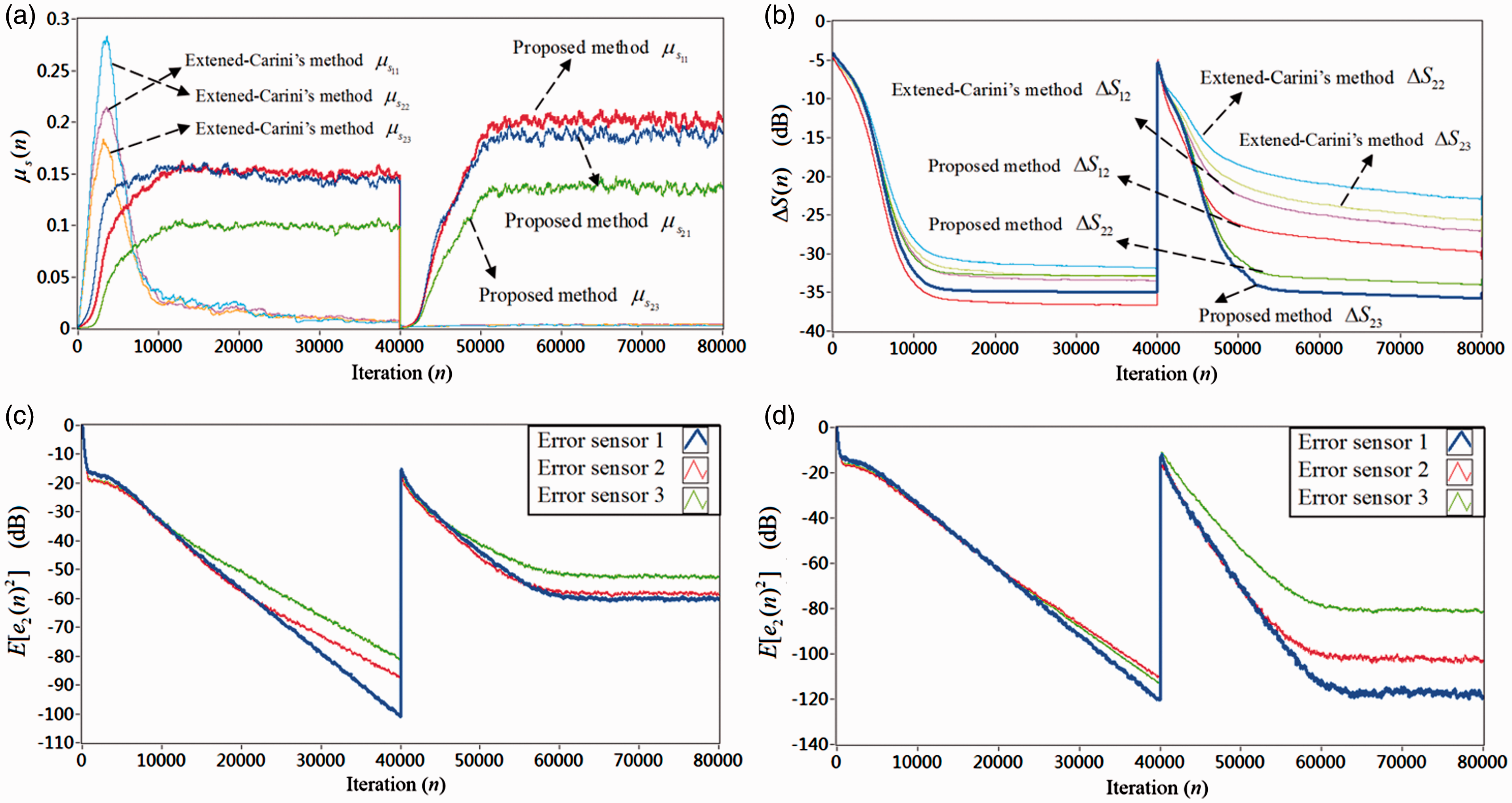
Simulation results in Case 3. (a) Step size
Conclusions
This paper proposes simplified and effective VSS strategy and ANPS strategy for multi-channel AANC system with OSPM method. Through a novel indirect error signal, the proposed method can guarantee every OSPM filter has its own exclusive VSS strategy and every injected noise has its own exclusive ANPS strategy, which can improve the adaptive performance of multi-channel AANC system.
Furthermore, the proposed method breaks up the limitation of Akhtar–Jung’s OSPM method that the number of secondary sources and error sensors must be equal and simplifies the complexity of multi-channel AANC system. Computer simulations show that the proposed method gives better noise reduction performance and secondary path modeling accuracy at a somewhat faster convergence rate comparing with the existing methods.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/ or publication of this article: This project is supported by the National Natural Science Foundation of China (No. 51605127), the Fundamental Research Funds for the Central Universities (No. 107-4115103040, PA2018GDQT0008).