
Abstract
This work studies the nonlinear fractional dynamics of asymmetric harmonic oscillators. The classical description of the physical system is generalized using the principles of fractional variational analysis. As a system of two-coupled fractional differential equations with a quadratic nonlinear component, the fractional Euler–Lagrange equations of the motion of the corresponding system are obtained. The Adams–Bashforth predictor-corrector numerical approach is used to approximate the system’s outcomes, which are then simulated comparatively with respect to various model parameter values, including mass, linear and quadratic nonlinear stiffness, and the order of the fractional derivative. The simulations provided the possibility of investigating various dynamical behaviours within the same physical model that is generalized by the use of fractional operators.
Keywords
Introduction
The subject of nonlinear dynamics has a lengthy history deeply connected with mathematics and physics. It is recommended that interested readers to look at two important review papers.1,2 In Ref. 3, the author was the first who approach the problem of a nonlinear oscillator methodically, starting with the linear oscillator and looking at the impact of the stiffness nonlinearities with quadratic and cubic stiffness. In addition to taking damping into account, he emphasized the distinctions between linear and nonlinear oscillators for both forced and free vibration. 3
The asymmetric oscillator model is assumed to take the following form:

In literature, many efforts have been made to study nonlinear oscillators4–12 where advanced methods and numerical solutions are developed in Refs. 12–17. In Refs. 14–17, the generalized formulations for some interesting models of nonlinear dynamics are performed via the use of fractional variational analysis. The main principles of fractional variations of calculus are derived in Ref. 18 with applications to fractional optimal control problems (Refs. 18 and 19 and see the references therein). Most commonly analytical solutions are not probable to get for nonlinear differential equations due to the nonlinear terms (quadratic, cubic or even higher). Therefore, efficient numerical techniques are necessary to be performed to overcome this difficulty and to get an approximate result.
The dynamical models in the literature are commonly constructed based on integer-order derivative and integral operators which may cause large errors to be embedded into the system. The generalization of these operators to non-integer order, so-called fractional calculus, gives the advantage of reducing the error and contribution of memory to the evolvement of the dynamical systems (see Refs. 20 and 21 and more inside). Therefore, fractional calculus provides an important tool for the modelling of complex phenomena appearing naturally in diverse problems of science and engineering, see Refs. 22–27 and references therein for an overview of possible application areas. The range of numerical methods for the solutions of fractional models are reviewed in the book 28 and higher order ones are initiated in papers.29,30
Preliminaries
The dynamics of the physical system investigated throughout this manuscript are constructed based on the Caputo fractional derivative and integral operators whose definitions are briefly stated below.20,21
The Caputo fractional derivatives (CFDs) of order
The Caputo fractional integrals (CFIs) of order
In the next section, a one-dimensional asymmetric Harmonic oscillator (HO) with quadratic nonlinearity term is described initially in the classical sense. In the next section, the dynamics of the system are reconstructed using fractional derivative and integral operators for a generalization. In this direction, the fractional Euler–Lagrange equation of the regarding system is produced being a system of two-coupled fractional differential equations with a nonlinear term. The last is devoted to the numerical solutions and the comparative simulations obtained from the classical case and fractional case of the system. The effect of the model parameters such as mass, linear and quadratic nonlinear stiffness and order of the fractional derivative are investigated through these simulations. Finally, we close the paper with a conclusion.
The physical description of the system
Consider a one-dimensional asymmetric Harmonic oscillator (HO) with quadratic nonlinearity term. The classical Hamiltonian



Combining equations (3) and (4), we got the following classical Hamilton’s equation (CHE)

The classical Lagrangian

Now, to obtain the Classical Euler–Lagrange Equation (CELE) known also as equations of motion, substituting (6) into the formula

We note that equations (7) and (5) are identical. This means that CELE and CHE are identical to each other.
Generalization of the system dynamics using fractional operators
In this section, based on the descriptions of fractional-order differentiation and integration operators stated in Section 2, we start firstly by fractionalizing the classical Lagrangian of the system given in equation (6). In fractional form it reads:

Next, the fractional Euler–Lagrange equation (FELE) can be obtained by applying (8) into the equation

It is important to mention in deriving equation (9), we follow the formalism presented in Ref. 18 which enables us to derive the FELE’s. It is based on the fractional integration by parts formula.
Moreover, we aim to derive the fractional Hamilton’s equation (FHE) of motion. In this regard, we define the following generalized momenta


The fractional Hamiltonian, which is defined as

Now the fractional Hamilton’s equation (FHE) can be obtained as

It is clear that (13) and (9) are identical, and the FHE and the FELE are reduced to CELE as
Numerical scheme and simulation results
In this part, the numerical solution of the generalized one-dimensional asymmetric Harmonic oscillator (HO) with quadratic nonlinearity term is presented. The corresponding FELE given by equation (9) is solved approximately using the scheme so-called the fractional Adams–Bashforth–Moulton predictor-corrector method29,30 and simulations are performed concerning some important model parameters.
Consider in general, the following nonlinear fractional differential equation of order



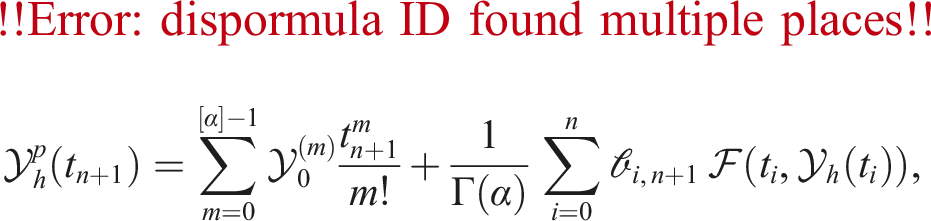
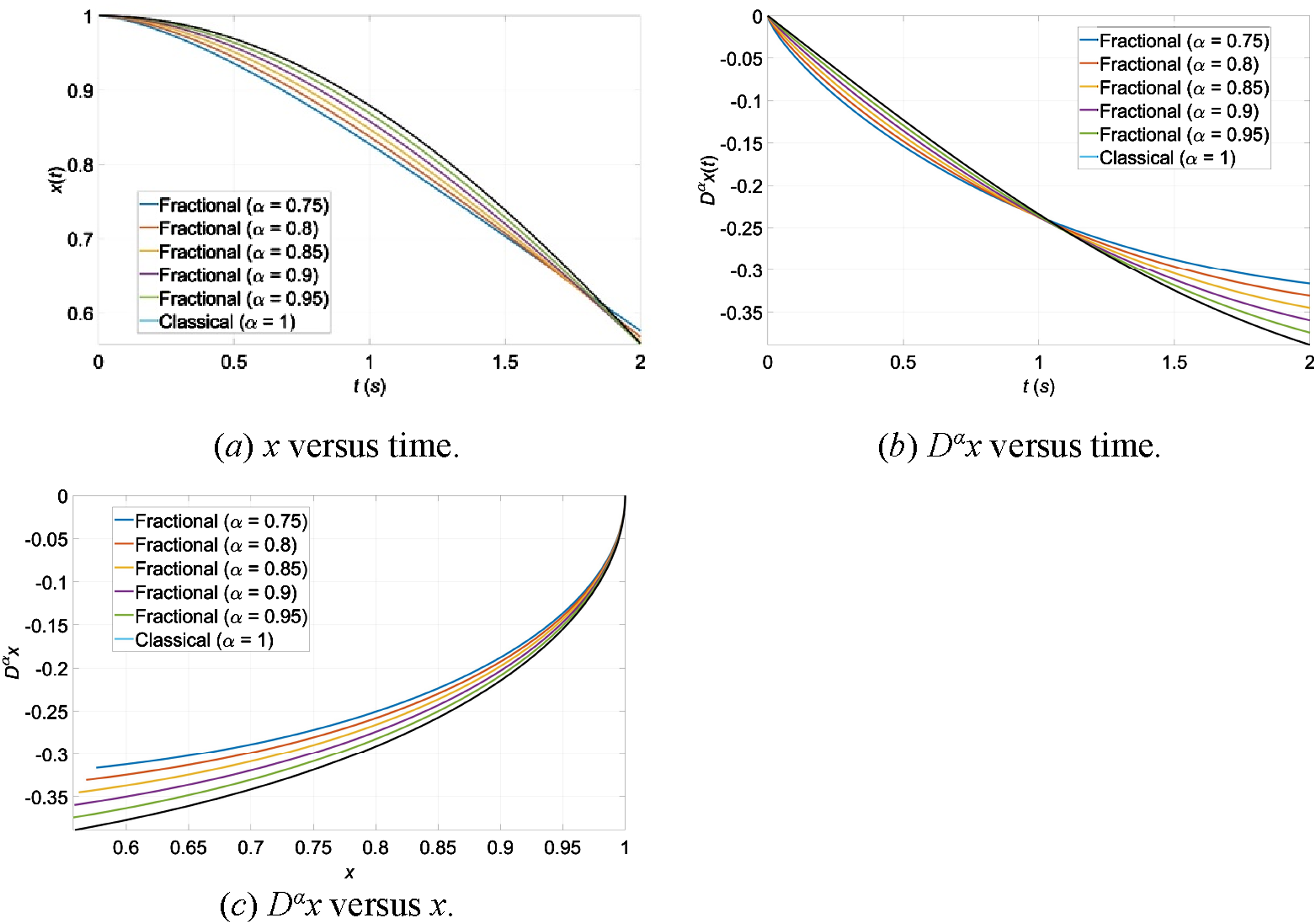
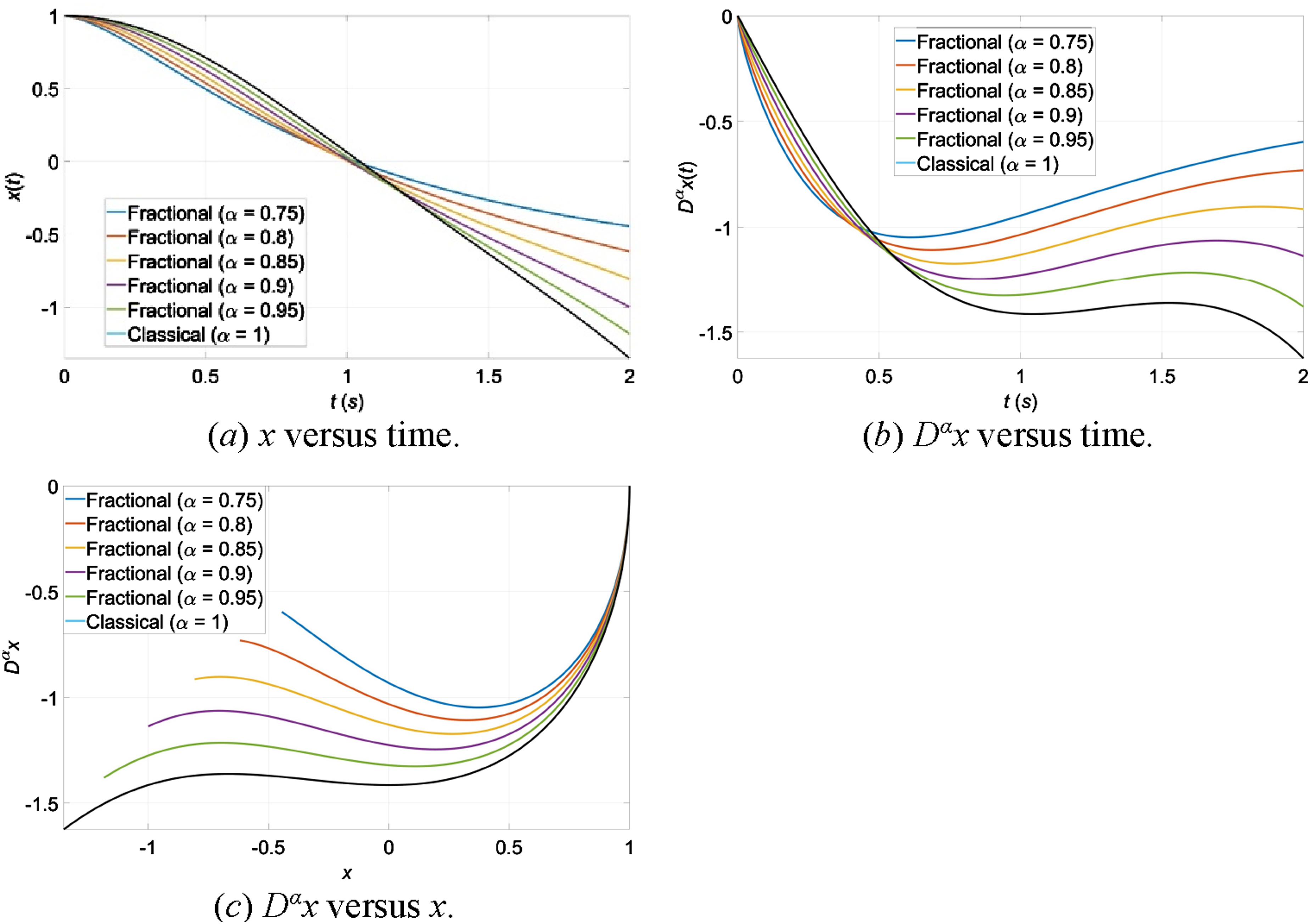
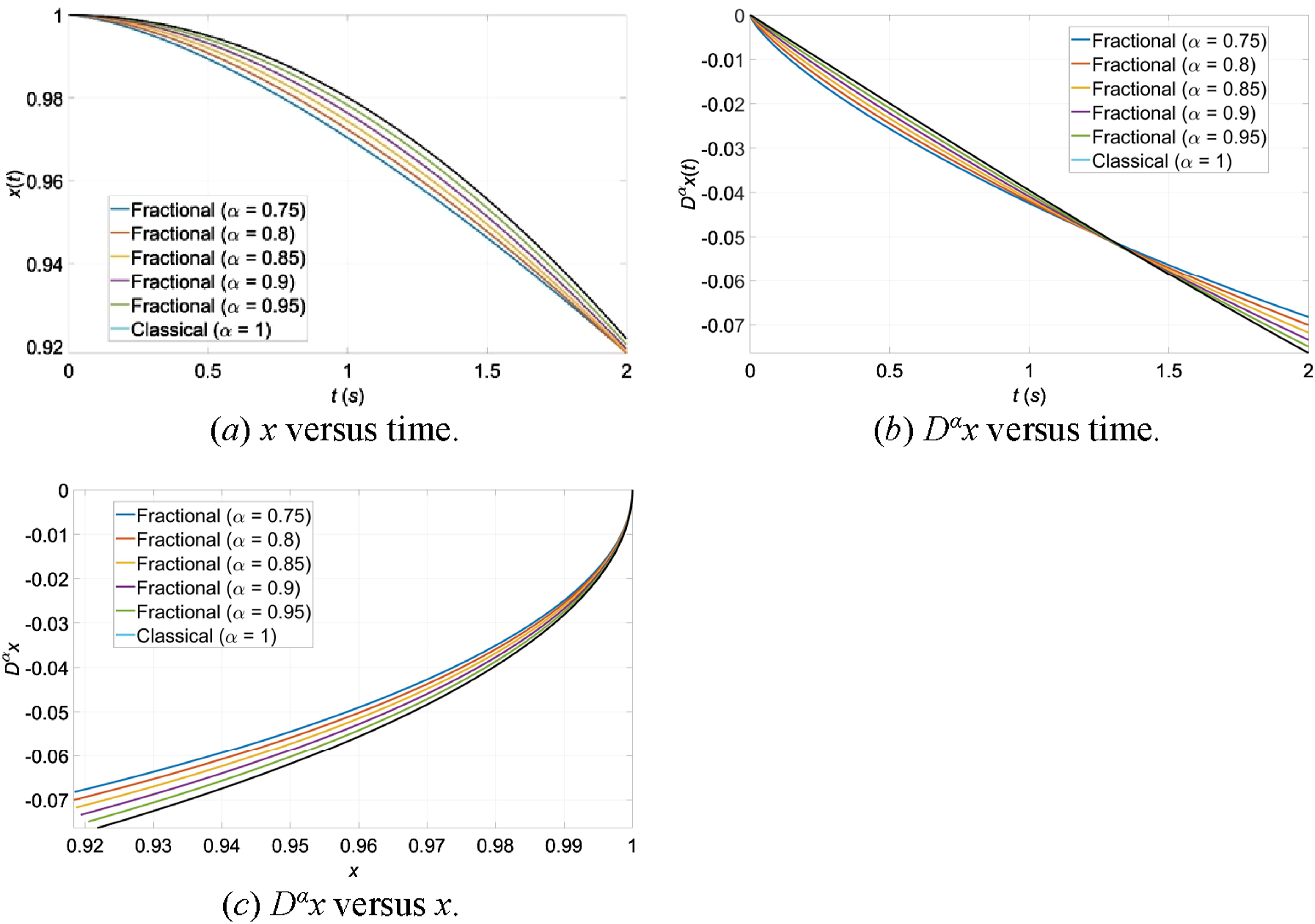
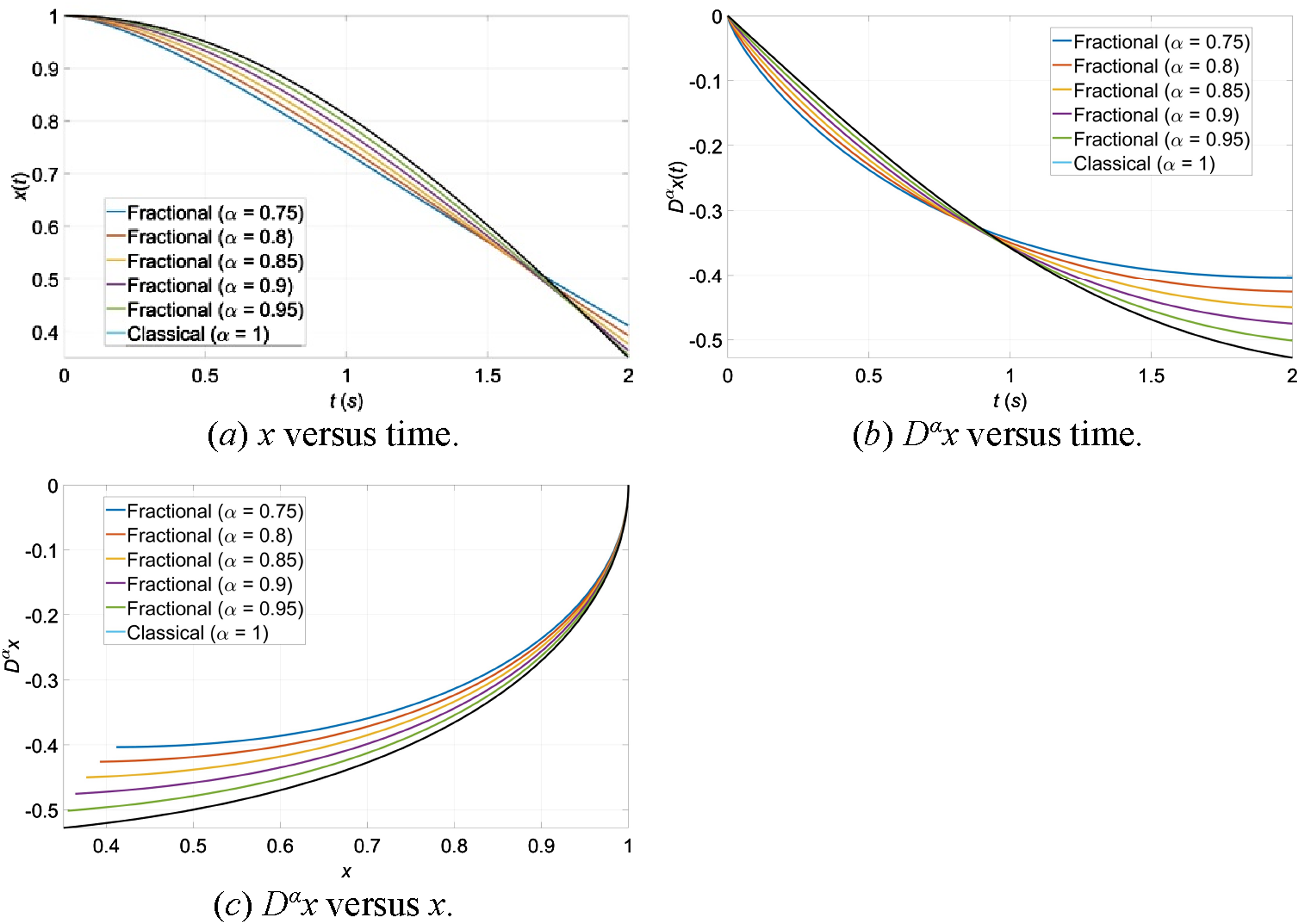
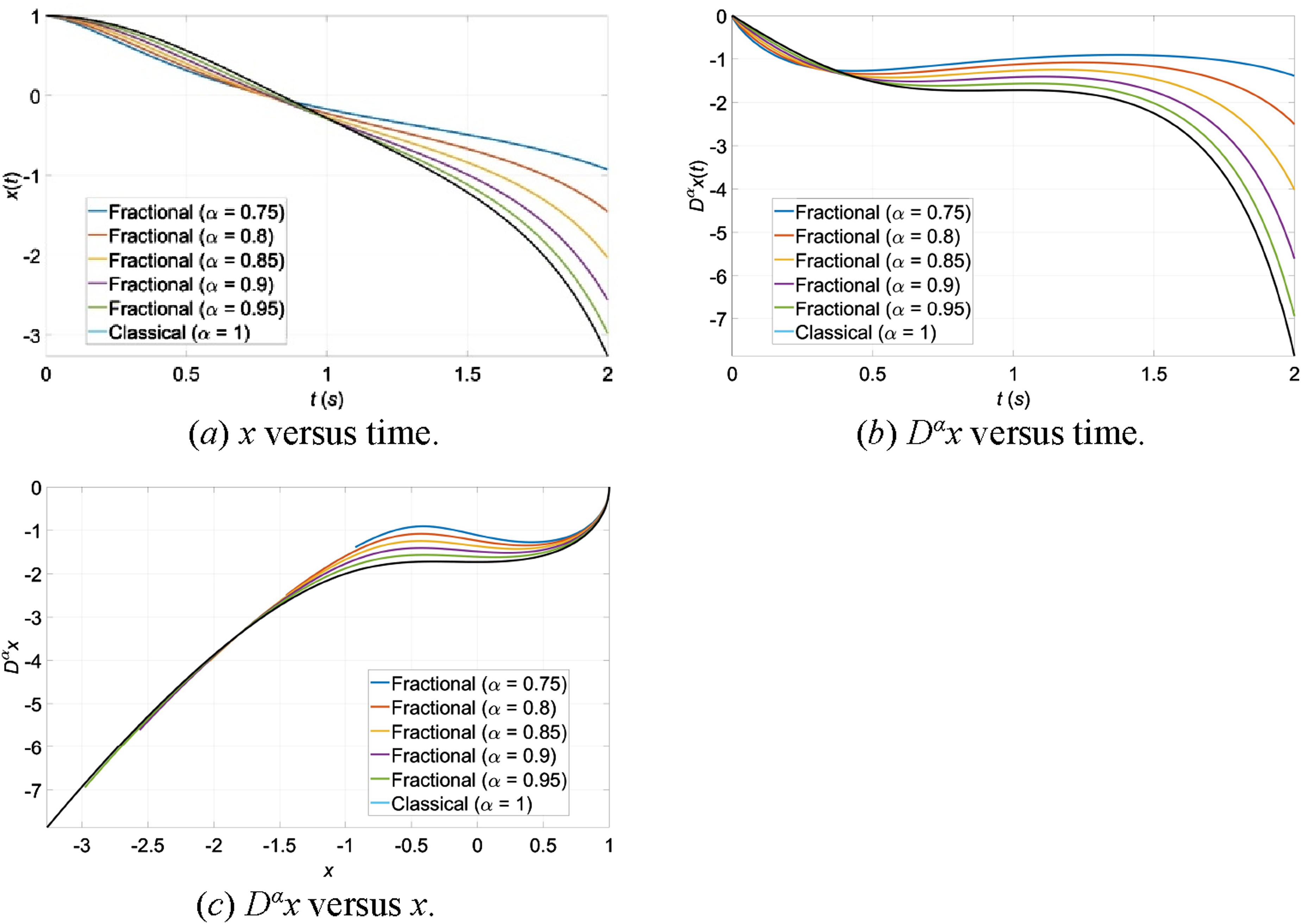
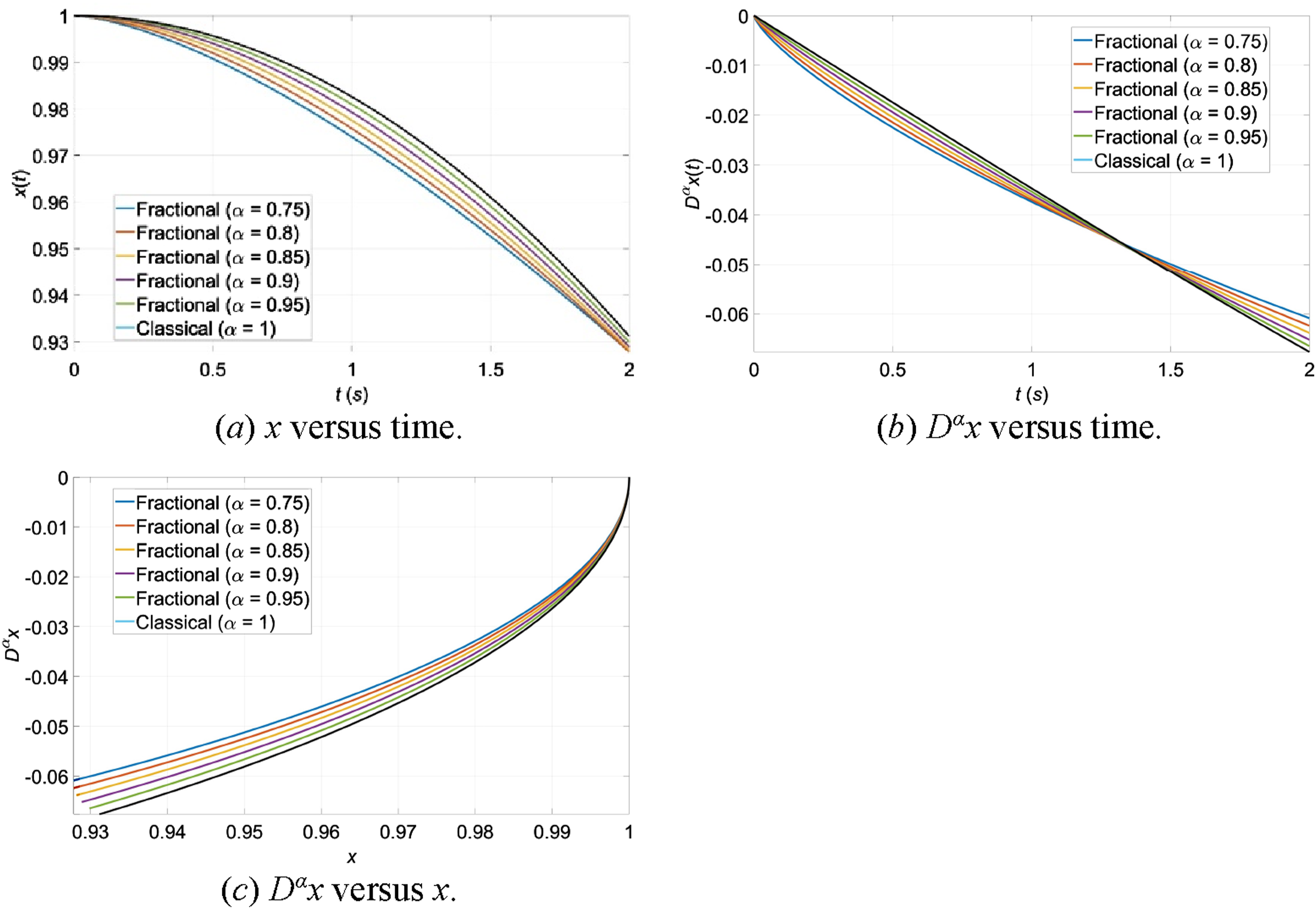
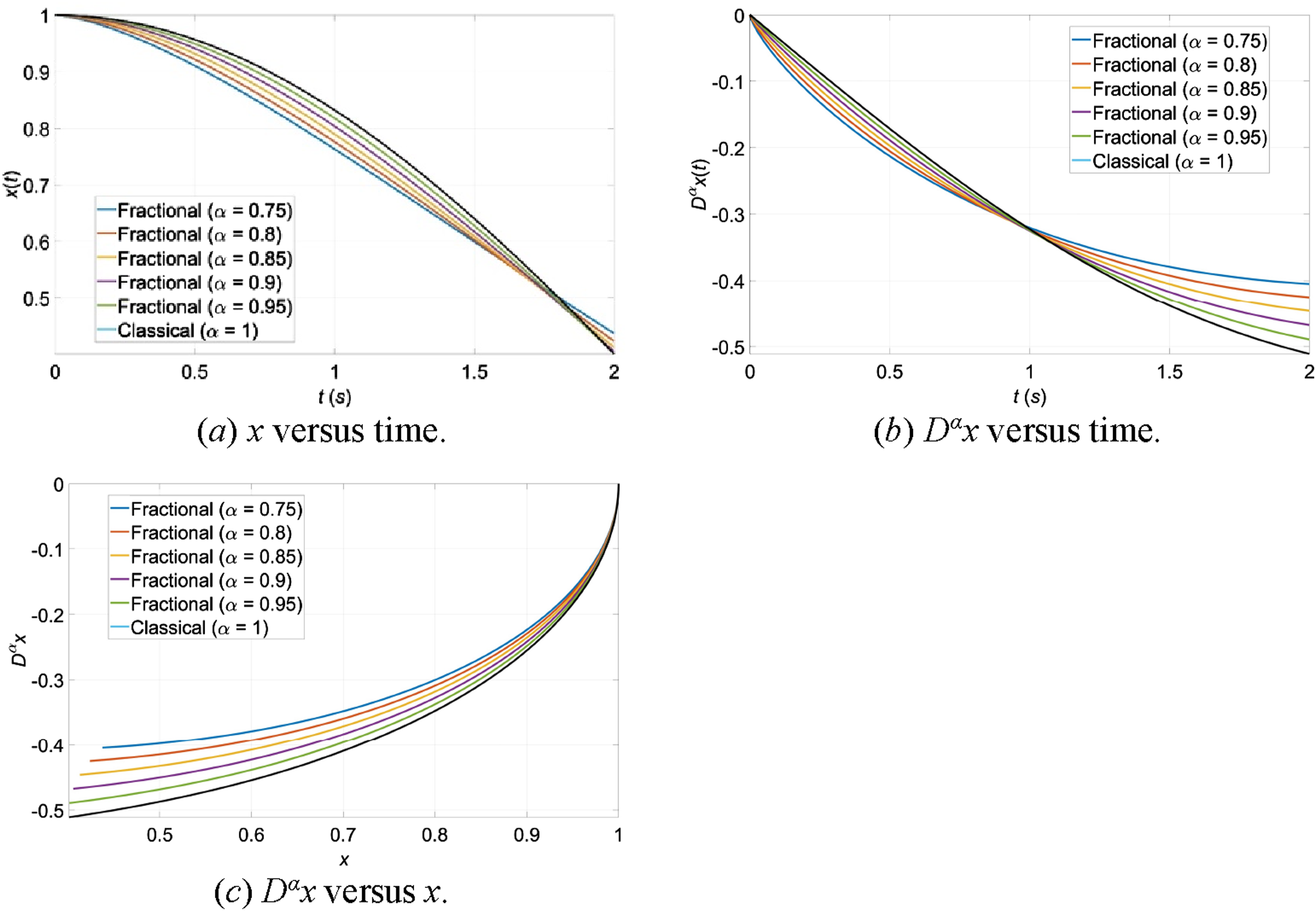
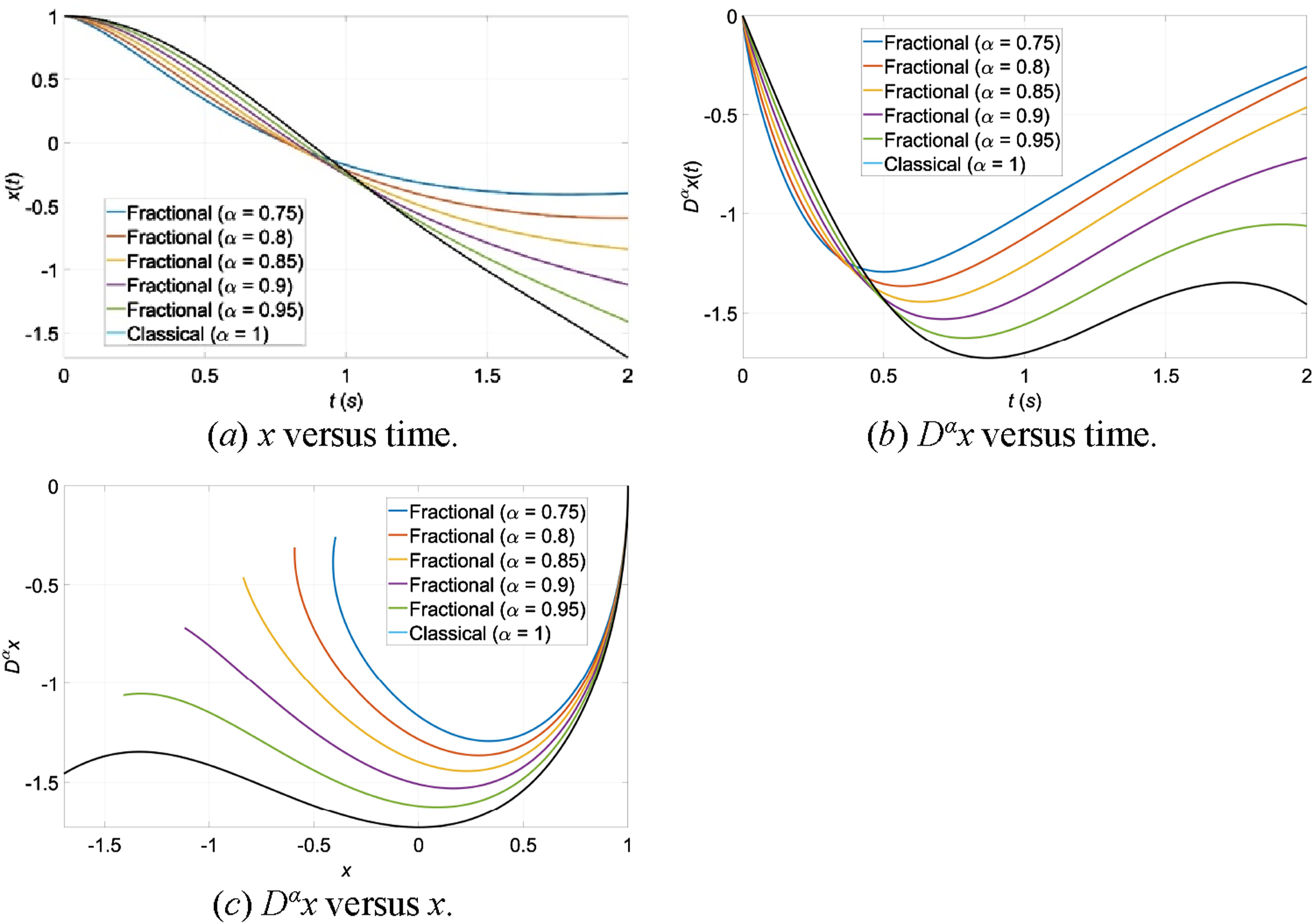
In the figures presented below, namely, Figures 1–9, the approximate solution of the FELE in equation (9) is obtained within the initial conditions Dynamical behaviours for Dynamical behaviours for Dynamical behaviours for Dynamical behaviours for Dynamical behaviours for Dynamical behaviours for Dynamical behaviours for Dynamical behaviours for Dynamical behaviours for 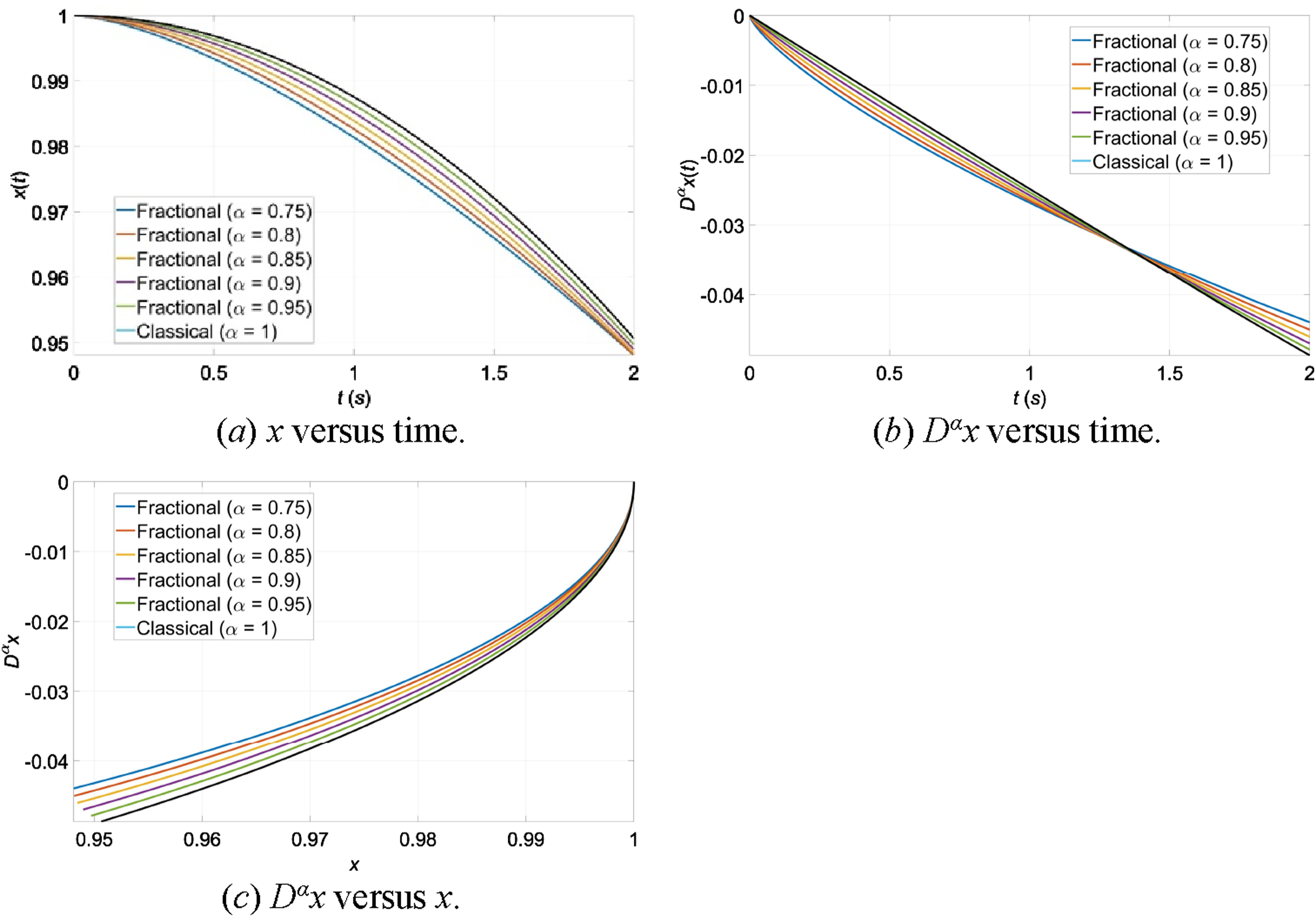
Case 1:
Case 2:
Case 3:
Figures 1 through 9 display the numerical results of the discretized FELE via equally spaced meshing. These figures demonstrate how the fractional order has a major impact on the behavior of fractional Euler–Lagrange equations. All figures have been generated on a 64-bit computer equipped with a 12th Gen Intel(R) Core(TM) i7-1255U processor and 16 GB of RAM, using MATLAB (R2023b) for code implementation.
The figures above show that, as predicted, the fractional solution converges to the classical case as
Conclusion
This paper studies the generalized asymmetric harmonic oscillator with quadratic nonlinearity based on fractional variational principles. Here, the Caputo definition is used for fractional integration and differentiation operators. The values of the order of the Caputo fractional derivatives are considered as the cases
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.