
Abstract
In this work, we analyze and investigate the mathematical modeling of a dynamical system connected to a piezoelectric device. Piezoelectric transducers are established as highly effective energy harvesting (EH) devices, often employed in real-world mechanical systems. The structure of the dynamical model contains a damped Duffing oscillator acting as the major component, which is connected to an unstretched pendulum and simultaneously to the piezoelectric harvester. To derive the governing equations of motion (EOM), Lagrange’s equations are applied based on the system’s generalized coordinates, in which they are analytically solved using the multiple scales (MS) perturbation method up to the second approximation. Moreover, the solutions achieved are compared with numerical ones to increase transparency and demonstrate the accuracy of the approximate solutions. In addition, comprehensive graphical representations have been produced to investigate the nonlinear stability of the modulation equations. Phase portraits, bifurcation diagrams, and Lyapunov spectra are displayed to depict various system behaviors, alongside Poincaré maps for deeper understanding. The various stability ranges are also explored and discussed. In conclusion, mechanical vibrations are transformed into electricity by the piezoelectric transducer connected to the dynamic model, which has widespread applications and includes crystal oscillators, medical ultrasound, gas igniters, and displacement transducers.
Keywords
Introduction
Over the past years, EH has become an increasingly prominent and influential concept. Harvesting unused natural energy sources has become increasingly important with rising energy demands. These sources can produce power from micro to milliwatts depending on conditions. The focus has been on micro-level EH for remote devices, which lowers costs. Once set up, these systems can generate power efficiently, similar to renewable sources. In Ref. 1, the piezoelectric EH systems’ mechanical and electronic aspects (PEHS) has been reviewed. While current technologies have potential, they still face issues with consistency and stability. The study assesses vibration-based PEHS and recommends optimization strategies to boost performance, addressing existing challenges and suggesting future improvements. Therefore, it explores a new EH system that transforms mechanical vibrations into electrical energy using piezoelectric sensors, managed by an Arduino Uno microcontroller, with the energy stored in a rechargeable battery for powering low-energy devices. To demonstrate the system’s effectiveness, a light bulb is used in the experimental setup, with the results confirming the potential of this method as a sustainable power source for low-power applications. 2 Growing interest in self-powered wearable electronics has been driven by the variety of options for powering portable devices. The development of flexible devices using piezoelectric transducers made from silicone rubber and multi-walled carbon nanotubes (MWCNTs) is examined in Ref. 3. It is shown that incorporating MWCNTs greatly enhances the voltage output under mechanical strain, with compressive samples performing better than tensile ones. Tests conducted during various human movements found that leg pressing generated the highest voltage output. These results suggest that such flexible devices have significant potential for powering portable electronics, offering a viable, battery-free alternative for smartwatches and calculators. In Ref. 4, the study addresses the global energy crisis with a system designed to generate non-traditional energy from human movement. It aims to convert the vibrations from footsteps into electricity using piezoelectric sensors arranged in series and embedded in tiles installed in crowded locations to harness foot traffic and convert it into power for charging mobile devices. Recent micro-electro-mechanical systems (MEMS) advancements have brought attention to wearable biomechanical EH devices. These devices can power wearable electronics and offer the potential for self-sustaining flexible technologies. This review examines three cores of biomechanical EH mechanisms: piezoelectric, electromagnetic, and electrostatic. It details how biomechanical energy is transformed into electricity and discusses the theoretical models applied to these processes. The features and applications of the devices and highlights of hybrid systems that combine different mechanisms for various functions, including power sources, sensors, and actuators, are summarized. It is explored in Ref. 5 future trends in biomechanical EH for wearable technology. A new vibration energy harvester, developed in Ref. 6, enhances frequency response by producing multiple peaks and broadening its operational range. This device features a spiral cantilever with tip magnets and a magneto-electric transducer connected through magnetic coupling. The design facilitates frequency tuning and reduces the spacing between frequency modes, boosting the efficiency of MEMS energy harvesters in converting mechanical vibrations into electrical energy.
The MEMS technology, particularly when combined with piezoelectric materials, benefits from the strengths of both fields, leading to innovative advancements with improved sensitivity, efficiency, and functionality across diverse applications. The following studies provide a comprehensive understanding of MEMS. In Ref. 7, the fractal theory is applied to examine the transition from pull-in instability to pull-in stability in Nano-MEMS, with a detailed analysis of the influencing factors and proposed new stability criteria. Research 8 explores the pull-in stability of fractal MEMS, offering insights to enhance the reliability and efficiency of MEMS devices. In Ref. 9, a new theoretical framework based on fractal theory is introduced to analyze pull-in stability in MEMS, developing mathematical models that offer a fresh perspective for designing and optimizing these systems. Additionally, 10 addresses the relationship between the inner topological structure of materials and their functional characteristics, particularly in the context of nanofibers.
In Ref. 11, the EH efficiency of mono-stable Duffing oscillators with piezoelectric coupling under white noise excitation is investigated. A higher-order averaging technique approximates the probability density functions for amplitude and phase, solving the Fokker-Planck-Kolmogorov equation. The mean-square electric voltage and output power are computed and validated using Monte Carlo simulations. The paper explores the impact of excitation intensity, damping, nonlinear stiffness, and resistance ratio on performance, showing that the higher-order averaging technique offers greater precision than conventional methods. Exploring advanced piezoelectric energy harvesters is crucial, mainly focusing on multi-stable designs and programmable equilibrium points, as discussed in Refs. 12 and 13. A new multi-stable piezoelectric energy harvester with magnetic interactions, which improves power generation at lower excitation levels, is examined. The study identifies five transition modes and three potential-well shapes by integrating geometric nonlinearity into mathematical modeling. Additionally, programmable nonlinear forces are introduced to address design complexities and optimize performance. Simulations and experiments confirm the viability of tri-stable and hepta-stable harvesters, showcasing their efficiency in powering sensor nodes across various voltage levels. The outcomes underline enhanced energy harvester performance achieved through advanced design and optimization strategies.
Analyzing the Lyapunov distribution pattern is essential for studying moving systems’ stability and chaotic dynamics. This method is especially significant for EH devices, where a deep understanding of the underlying dynamics can substantially affect their design and performance. A complex spatiotemporal dynamics and chaotic behavior of a Duffing-type mechanical system influenced by external forces are investigated in Ref. 14. A nonlinear wave equation with cubic nonlinearity models the system. By applying a perturbative approach, the study develops mathematical frameworks to analyze system behavior at multiple scales. Lyapunov exponents assess local, convective, and overall dynamics, revealing periodic, quasi-periodic, and chaotic responses to different stimuli. The research also introduces the notion of a “chaotic wave” to explain the spatial spread of chaos in heterogeneous environments, with its propagation velocity defined by convective Lyapunov exponents. In Ref. 15, a new approach is introduced for assessing the stability of first-degree stochastic polynomial systems under Risk-Sensitive optimal control based on Lyapunov’s stability theory. The stability is established using Lyapunov’s indirect method along with the dynamics of the Riccati gain equation. This approach ensures exponential stability for deterministic systems and enhances robustness for stochastic systems. Simulations confirm the robustness, effectiveness, and practicality of this method. One of the primary challenges in EH is optimizing device performance and efficiency under variable and unpredictable conditions. The Lyapunov distribution pattern can be employed to determine stable, periodic, and chaotic motion areas in these devices. The authors addressed this challenge by focusing on cooperative wireless communications with a decode-and-forward strategy involving an EH relay. The unpredictability of harvested energy and the wireless channel makes managing relay energy to improve communication performance challenging. By applying Lyapunov theory, they developed in Ref. 16 an optimization problem to minimize the long-term average symbol error rate while considering battery constraints.
It is essential to understand that sub-harmonic resonance occurs when a system’s response happens at a fraction of its natural frequency, while super-harmonic resonance is characterized by the response frequency being a multiple of the natural frequency. Both types of resonance can lead to unexpected and potentially damaging oscillations in nonlinear dynamic systems. The study 17 examines the nonlinear secondary resonance behavior of horizontal axis wind turbine blades under super-harmonic and sub-harmonic excitations using a 3DOF dynamic model that includes pre-twist effects. The MS method identifies nine distinct scenarios of secondary resonance, analyzing their amplitude-frequency and phase-frequency responses. Using the Hartman-Grobman theorem, the stability analysis identifies multiple saddle-node bifurcations. The study also assesses the impact of various factors, including damping, pre-twist, angular velocity, and excitation force amplitude, on the amplitude-frequency response and supports these results with a comparative analysis. In Ref. 18, a mono-stable Duffing energy harvester subjected to base excitation is explored for capturing vibrational energy through super-harmonic resonance. The averaging method provides approximate analytical solutions focusing on displacement, voltage responses, and peak amplitude. A detailed power flow analysis incorporates mechanical and electrical power, energy, and efficiency equations. Numerical simulations reveal that super- and sub-harmonic resonances can significantly enhance the performance of nonlinear piezoelectric energy harvesters across a broad frequency range, in contrast to linear systems restricted to a single frequency. In a time-delayed nonlinear oscillator, two stable periodic solutions arise after the loss of stability at equilibrium due to resonant Hopf bifurcations. These solutions, characterized by distinct amplitude and frequency components, can coexist depending on initial conditions. When the forcing frequency approaches half of the lower frequency of these solutions, two distinct families of super-harmonic resonances may develop, each showing unique dynamic behaviors. One family might vanish at a specific excitation level, leading to non-resonant responses, while the other can be maintained with adjustments to the forcing frequency. Time trajectories, phase portraits, and bifurcation diagrams are used to explore these dynamic behaviors. 19
Acknowledging the importance of the subsequent works is crucial, as they laid the groundwork for this study. Research, 20 for example, investigates a two DOF spring pendulum with a pivot following a Lissajous curve. The motion equations are established using Lagrange’s equations and solved with the MS technique, with findings compared to those from the fourth-order Runge-Kutta numerical method. An investigation into resonance and stability shows that the system remains stable across a diverse range of parameters, which is beneficial for mitigating potential issues in engineering contexts. The research focuses on a damped 2DOF auto-parametric dynamical system, using Lagrange’s equations and the MS to obtain approximate solutions. The study addresses internal and primary external resonances, streamlines the modulation equations, and assesses stability using the Routh-Hurwitz criteria. 21 The study in Ref. 22 analyzed the planar dynamics of a triple pendulum system with a 3DOF, which consists of two rigid double pendulums linked to an unstretched pendulum. The aim was to derive accurate analytical solutions and conduct a resonance analysis. Research 23 focused on the nonlinear stability of a damped spring pendulum with a 3DOF throughout its entire motion. In Ref. 24, the authors explored the damped behavior of a spring pendulum with a suspended point following a circular trajectory. Furthermore, 25 provided a comparative analysis of the effects of piezoelectric versus electromagnetic devices on a 2DOF spring pendulum with nonlinear damping.
Three notable studies thoroughly explore recent advancements in dynamical systems and vibrational analysis. In Ref. 26, the authors investigate the stability and behavior of a complex 4DOF system under resonant conditions, providing valuable insights into its dynamic stability and response. In Ref. 27, the effects of external torques and forces on vibrational dynamics are addressed, contributing to understanding how such forces influence system behavior. However, the study in Ref. 28 delves into the forced vibrations of a spring pendulum, shedding light on the complexities of planar motion under external forces. The MS approach is used to obtain the approximate results for the controlling EOM, which are verified using the algorithm of Runge-Kutta. Together, these studies advance our knowledge of dynamical systems and provide a deeper understanding of their vibrational characteristics.
This investigation focuses on a dynamic model integrated with a piezoelectric harvester that is designed to harness electrical energy from the vibrational motion of a system’s structure. The MS method was applied to obtain approximate solutions, extending through the second-order approximation. The analysis of external resonance conditions through various categorized resonance scenarios is explored. Modulation equations are formulated to investigate steady-state solutions and assess the stability of fixed points. The accuracy of the approximate results has been validated by comparing them with numerical outcomes. Time history numerical solutions were analyzed to evaluate the effects of various parameters, including both traditional and piezoelectric characteristics. Graphical representations illustrate the influence of excitation amplitudes and damping coefficients on output voltage and power. Bifurcation diagrams are presented, and different modes of system motion are clarified through the analysis of Lyapunov exponents and Poincaré maps. Comprehensive figures depict the nonlinear stability of the dynamic system. The results’ significance stems from its detailed analysis of vibrations in a 2DOF dynamic system that enhances electrical power extraction, particularly for practical uses involving piezoelectric devices. The significance of this work lies in our use of the multiple scales method to achieve second-order approximations despite the fact that most studies typically rely on numerical solutions. Our system’s complexity poses challenges in applying this method, yet our commitment to accuracy in solutions drives us to prioritize the employed techniques. Additionally, we conducted a thorough stability analysis using the Routh-Hurwitz method, a precise approach for determining system stability. This meticulous attention to detail, combined with the quality of the codes utilized to generate new visualizations, allows us to present the system we study in a novel and informative manner.
Description of the model
This investigation section details the 2DOF dynamical system studied, consisting of two linked segments. The initial part has a mass Dynamical system’s modeling.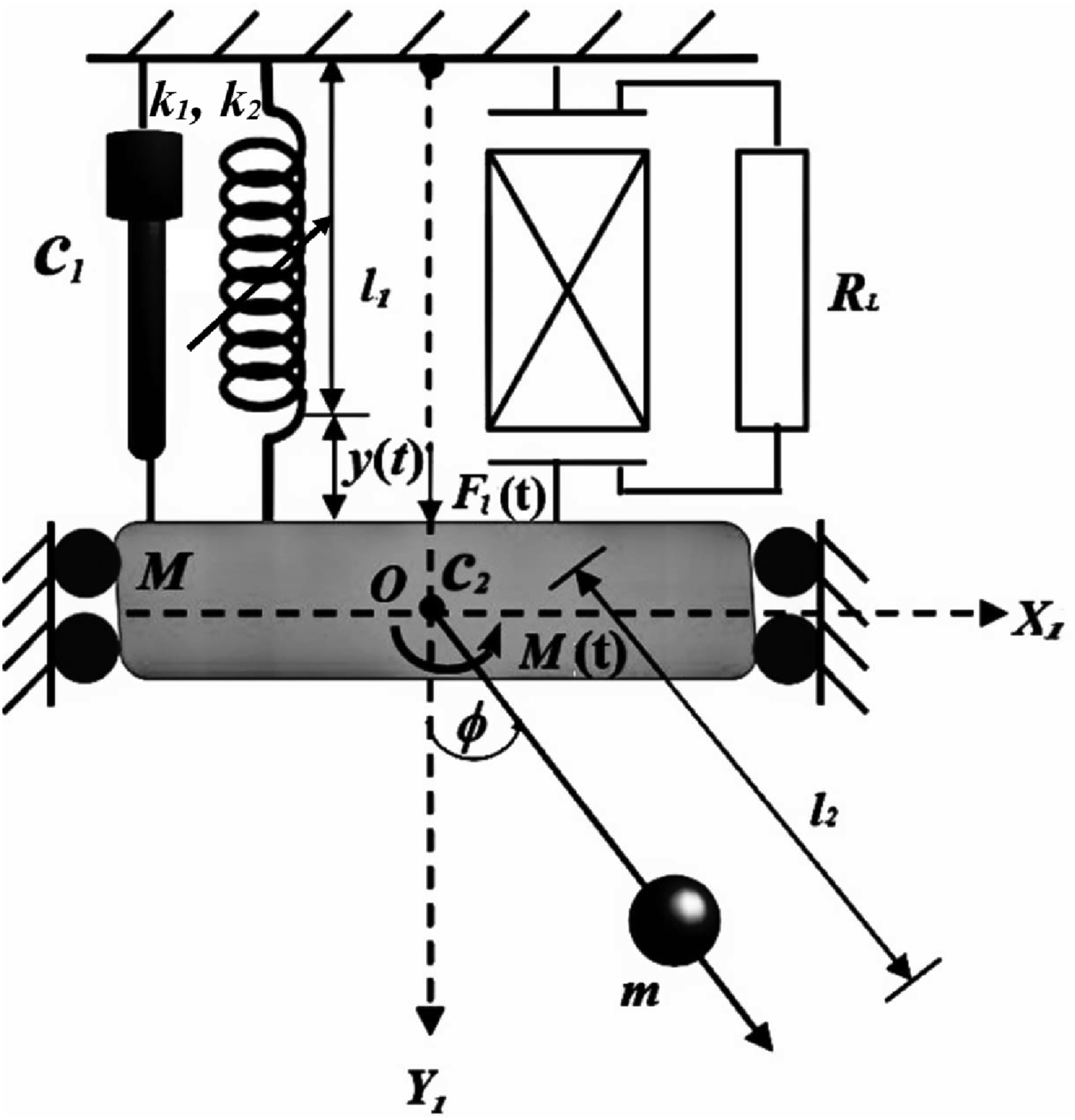
It’s essential to solve the dynamical system using the Lagrangian function, which has the formula

Taking into account the following explanations of the dimensionless parameters.
According to the applied force and moments, one can use Lagrange’s equation to determine the EOM besides the equation describing the behavior of the piezoelectric transducer, derived from its electrical circuit mechanism, in the below dimensionless form



In these equations,
Multiple scale technique
This section aims to provide approximate solutions for the EOM (3)–(5). The MS method is utilized to achieve these approximations with high degree of accuracy. Therefore, the amplitudes of the oscillations are expressed in terms of a small parameter, as shown below

The scales of time are symbolized as

The following operators are employed to convert the derivatives concerning the original time

It is essential to consider the parameter’s insignificance in equations (3)–(5) as outlined.

To formulate the following sets of partial differential equations (PDEs) in terms of powers of






These equations are solved sequentially, leading to the following expressions for the initial approximations of equations (10)–(12)





Therefore, the following are the second-order solutions



The unknown complex functions
Resonance investigation
The goal of this part is to identify resonance scenarios, derive modulation equations, and consider possible consequences. Such situations may occur in quadratic solutions when one or more denominators approach zero,30,31 leading to two types of resonance a. Attaining external primary resonance is feasible when b. Internal resonance occurs, once the criteria
As observed, the system oscillates at a frequency lower than 1, a phenomenon known as sub-harmonic resonance. Sub-harmonic resonance is crucial in designing and analyzing mechanical and electronic systems, as it occurs when a system exhibits vibratory responses at integer fractions of its fundamental resonant frequency.
Next, we will discuss the system using an external resonance case

Inserting (24) into the quadratic solutions (19) and (20) gives the solvability condition.

We can convert these conditions into polar form as follows: We construct a system of two nonlinear partial differential equations in terms of the functions, so

The approximate solutions
Noticing that the functions

Employing appropriately modified phases can transform the conditions necessary for the solvability of PDE (25) into standard conditions.

By separating the imaginary and real components and substituting equations (26)–(28) into equation (25), a corresponding system of four modulation equations can be readily derived.

The above system of modulation (29) can be solved numerically concerning the terms
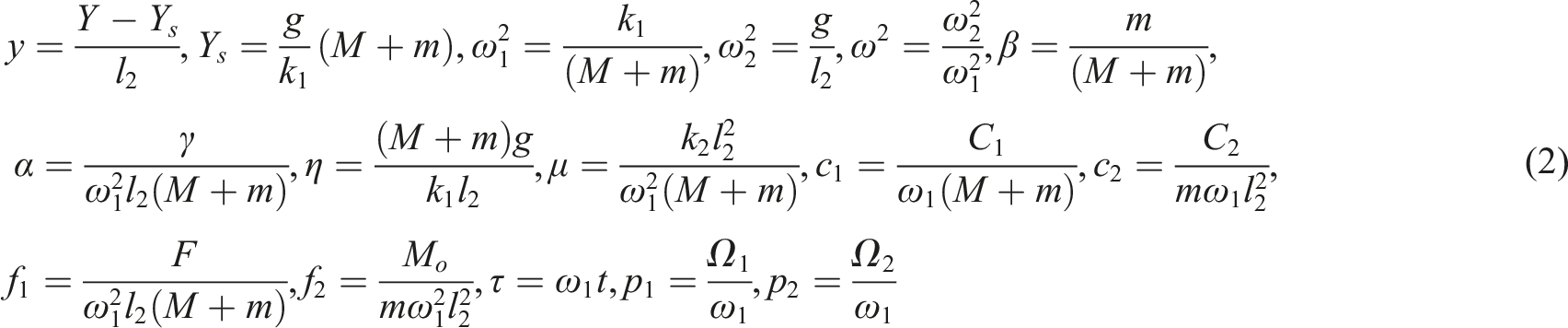
A graphical comparison is presented in Figure 2, showing the alignment between the numerical and approximate solutions, confirming the method’s accuracy. The figure is generated using these fixed parameters Presents the time histories comparing the approximate and numerical solutions at 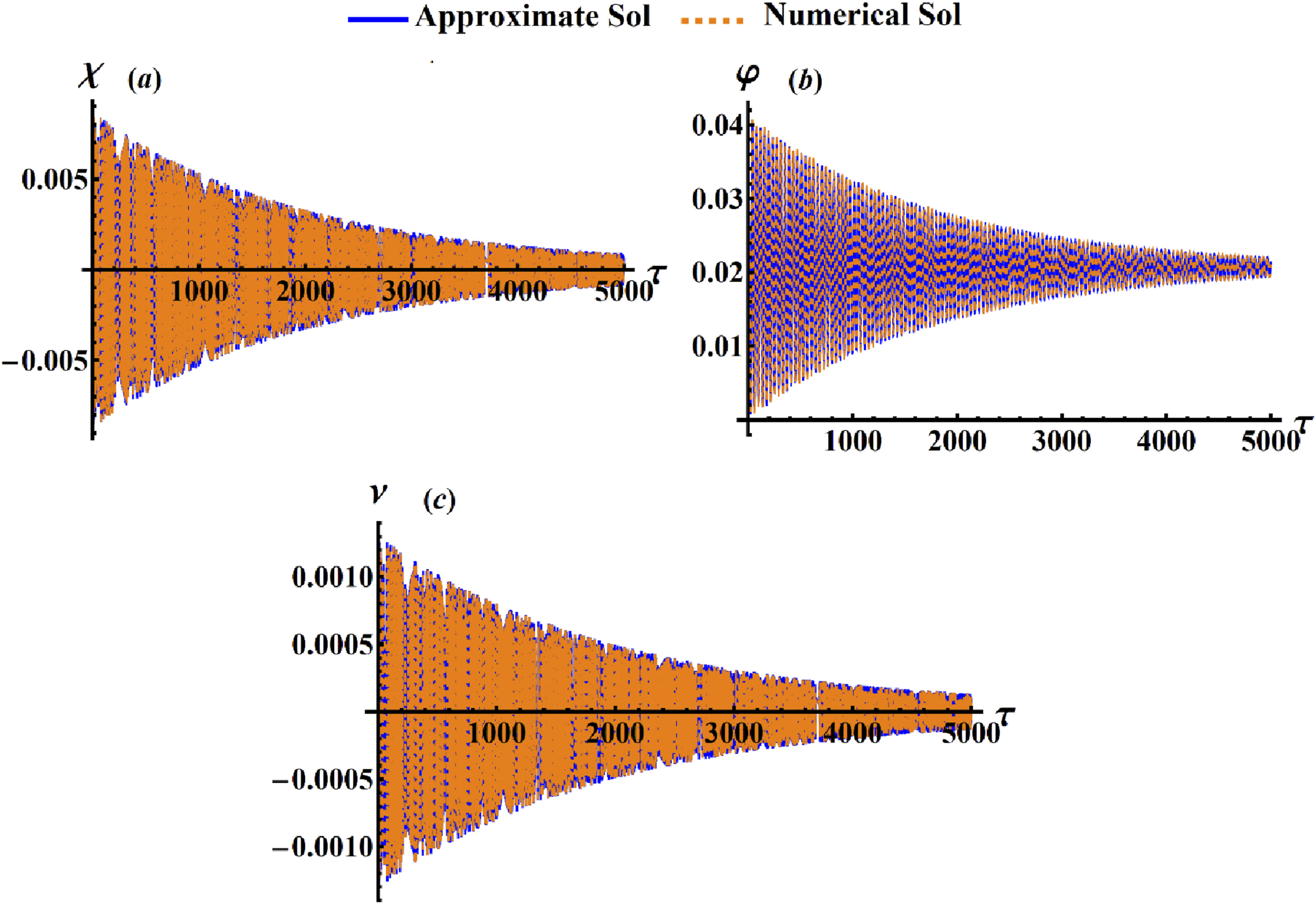

Figure 2 illustrates the behavior of the dynamical model over
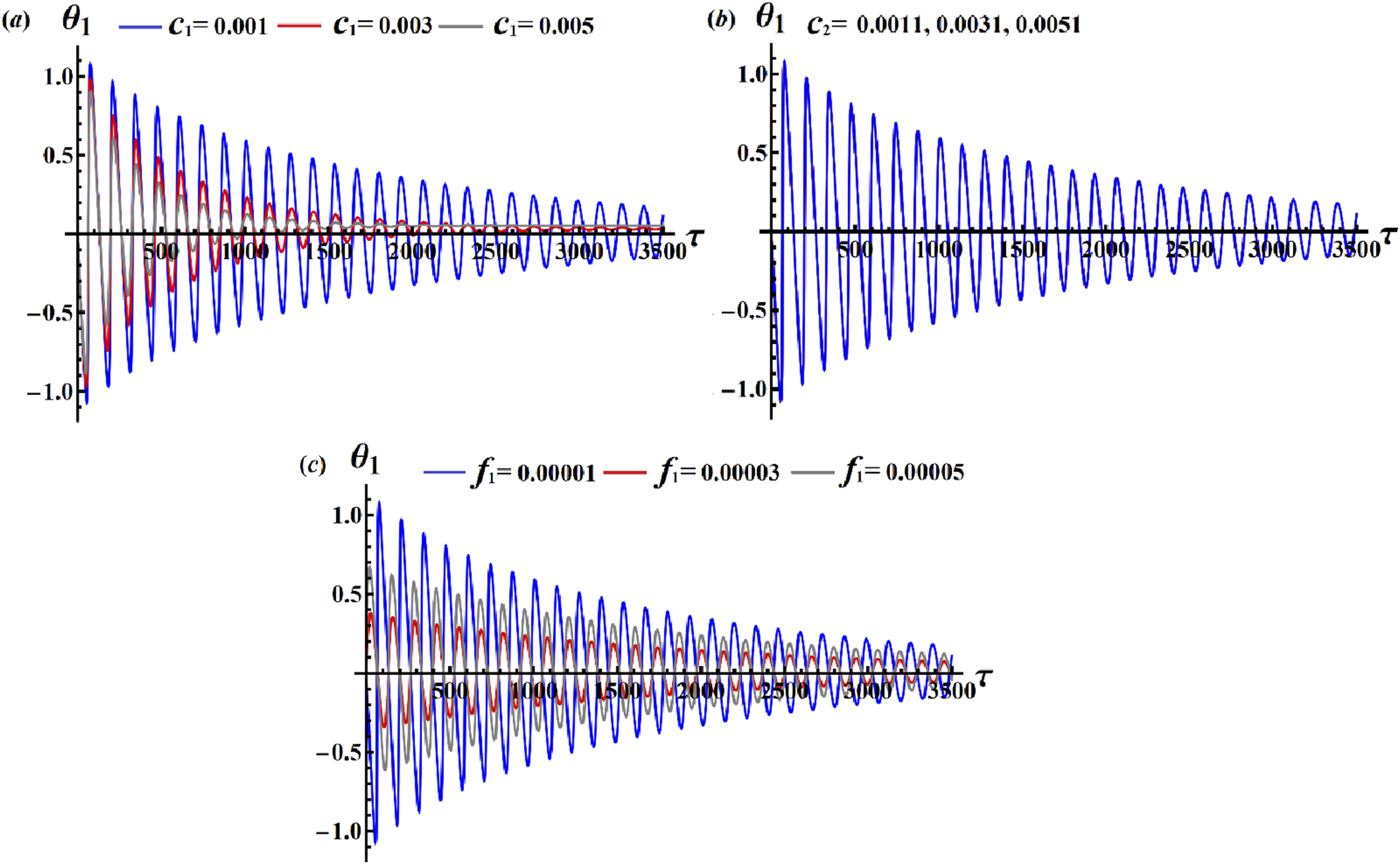
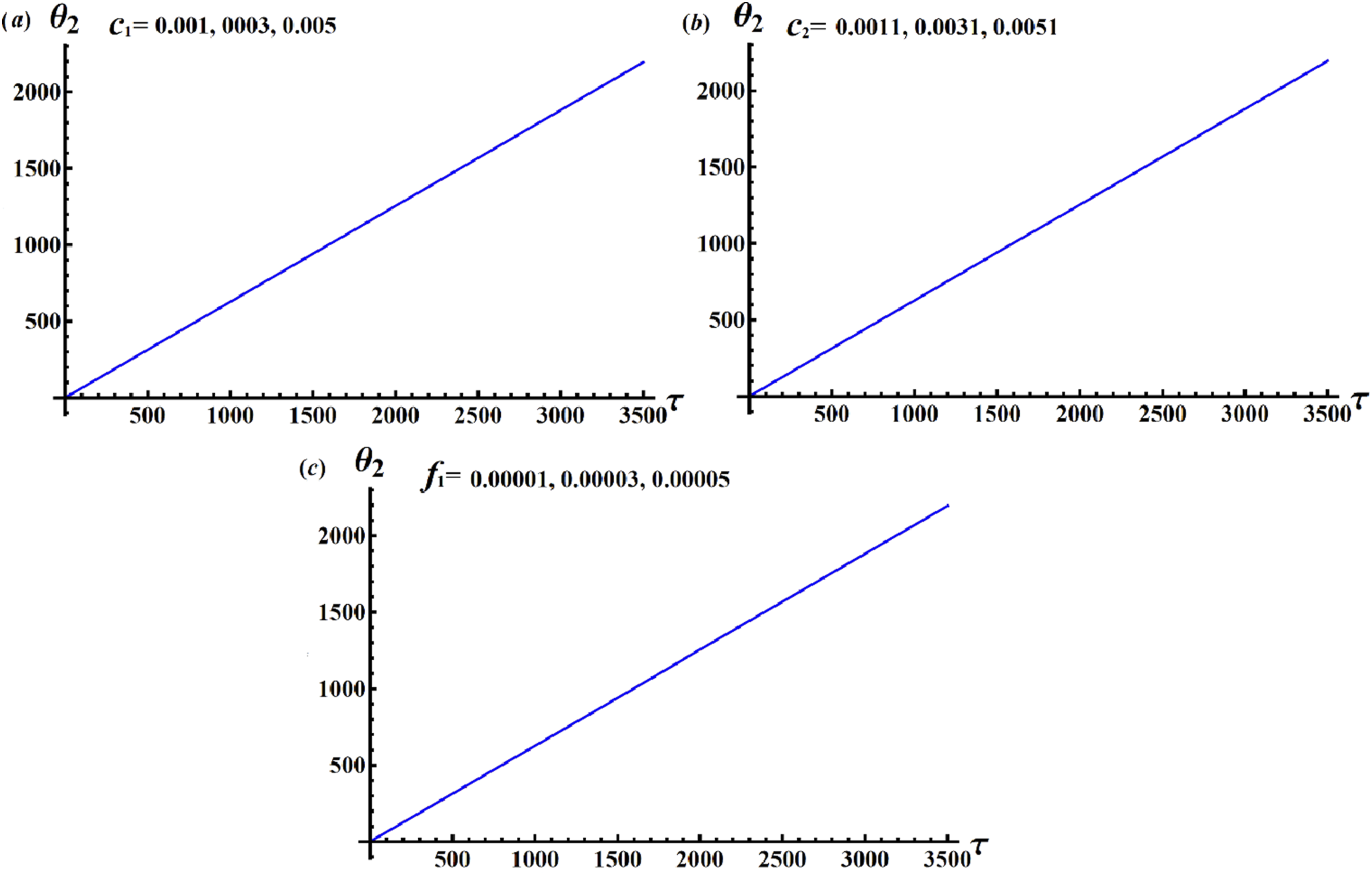
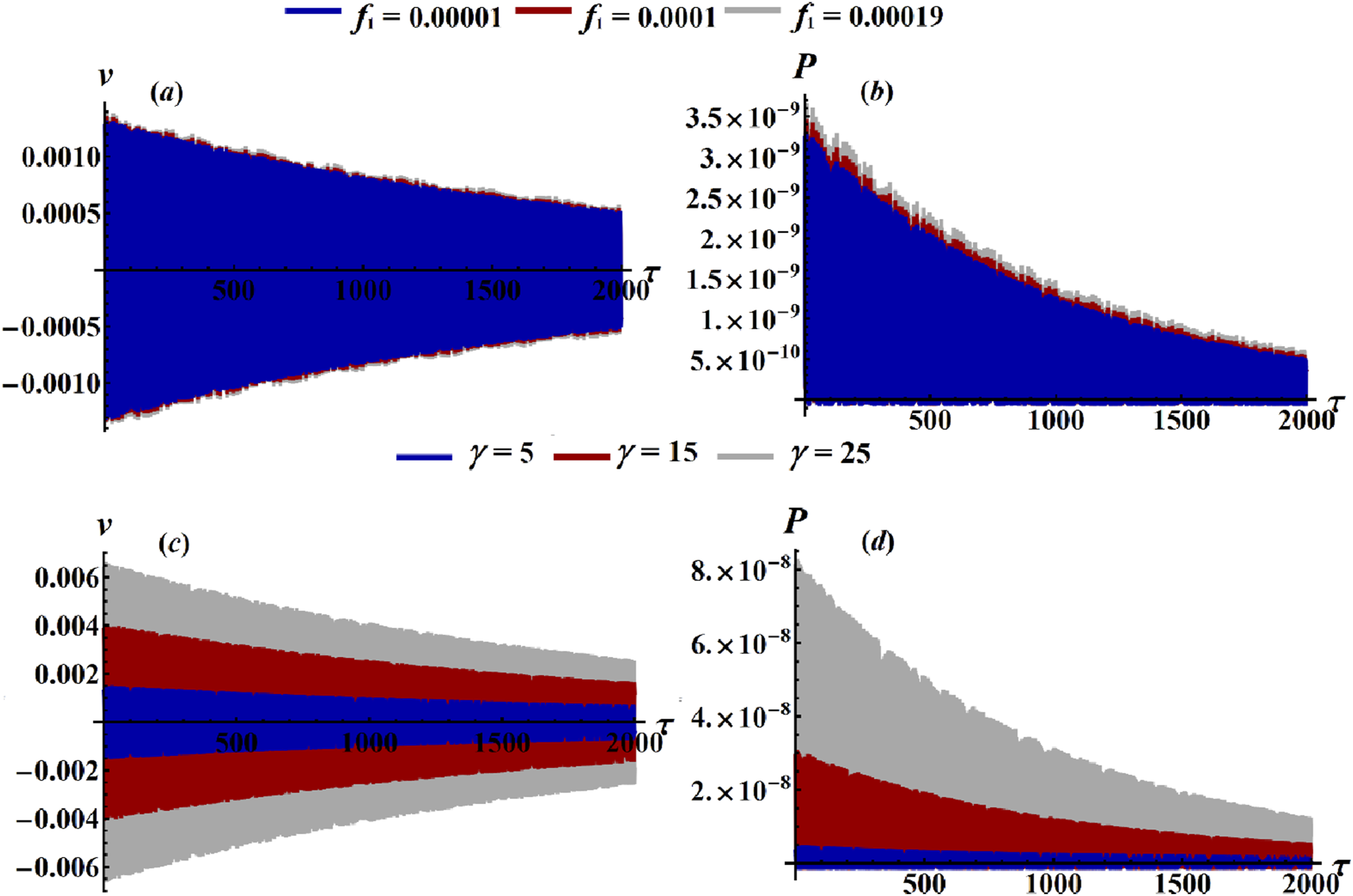
It is now pertinent to investigate the influence of parameters on the model over time. The analysis studied the effect of the basic parameters. It is observed that parameters Explores the behavior of the solutions of Examines the behavior of the solutions of Explore the solutions for Assess the solutions for Determine how changes in the curves of the plane Delve into how modifications in the curves of the plane 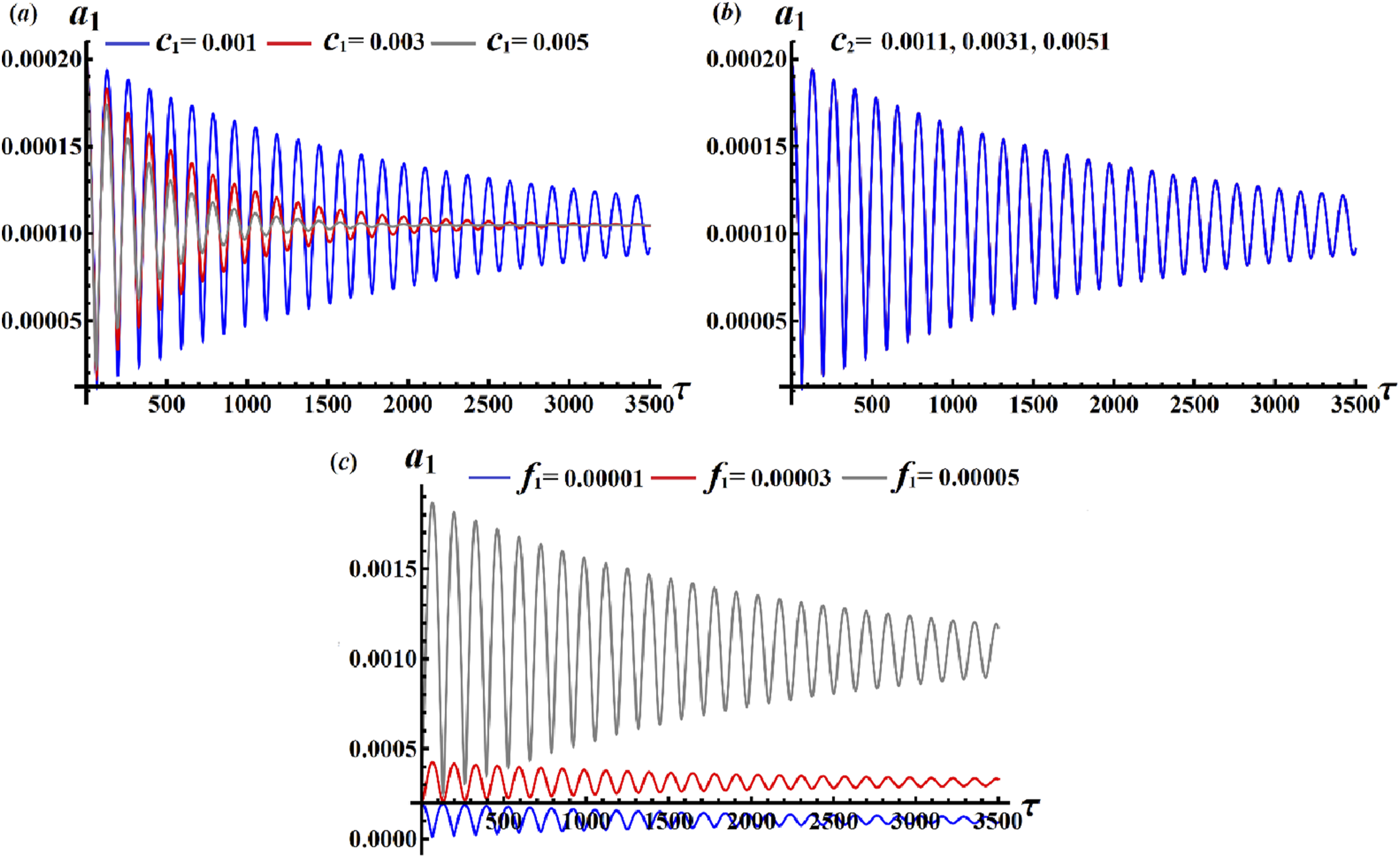
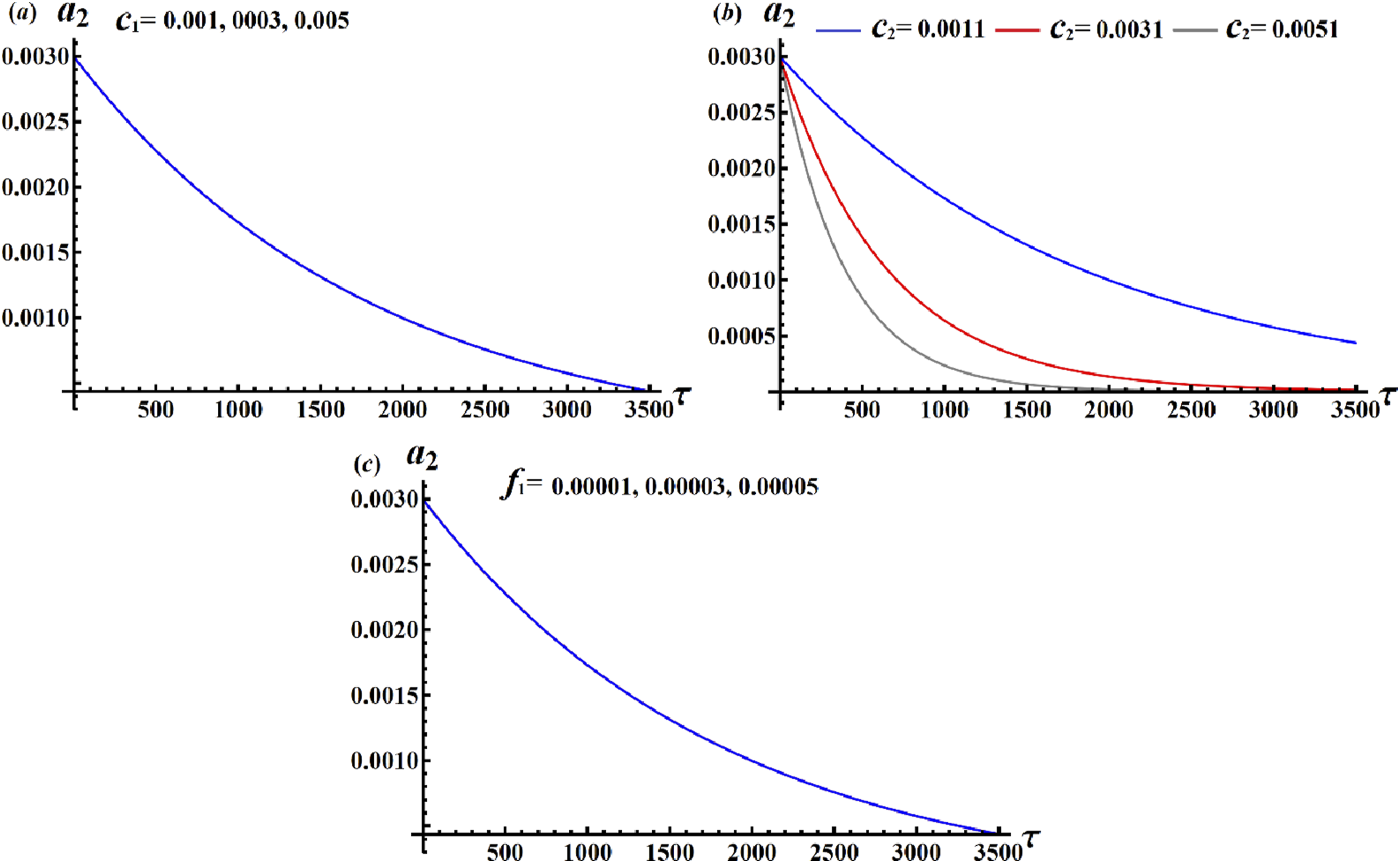
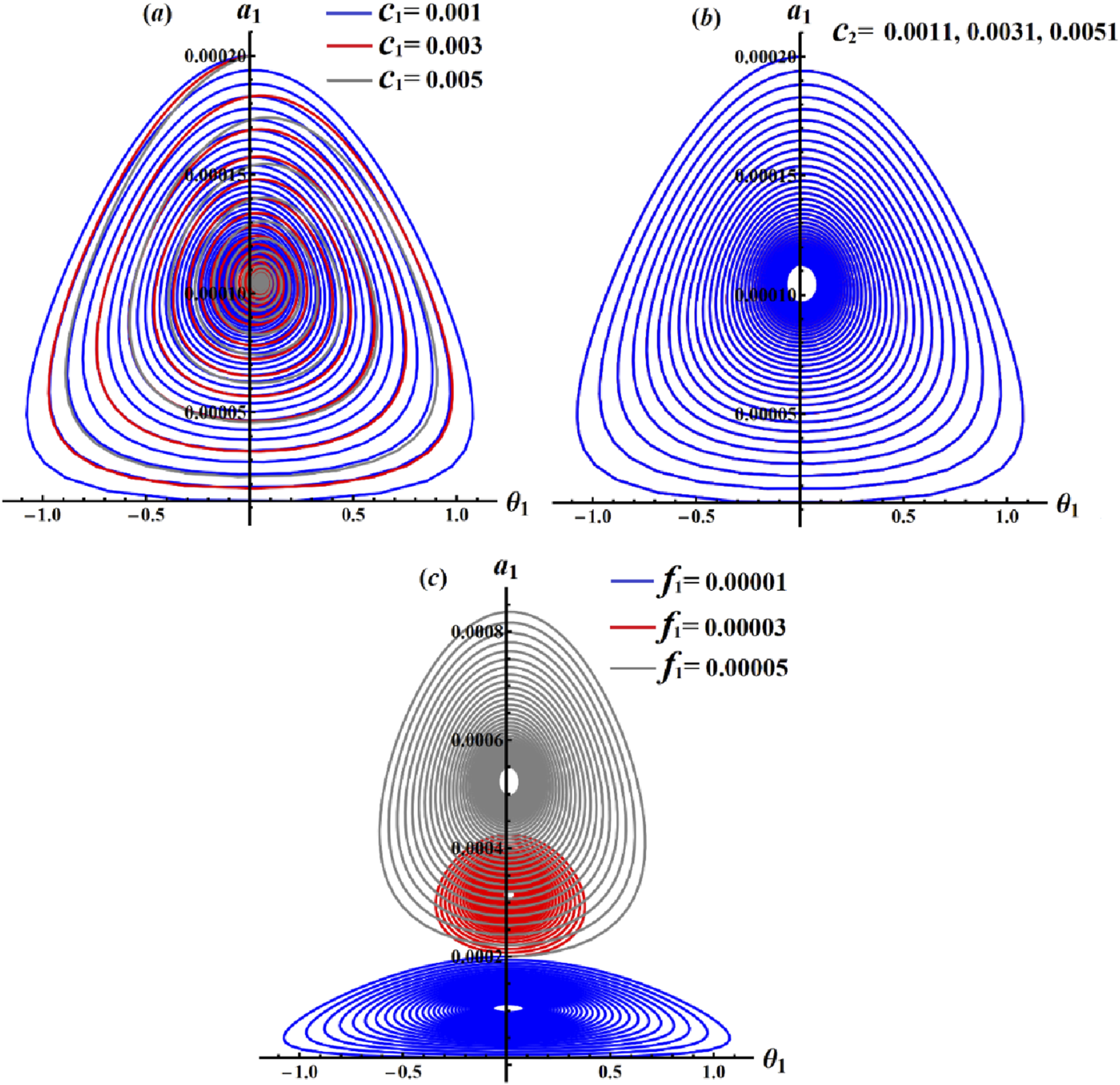
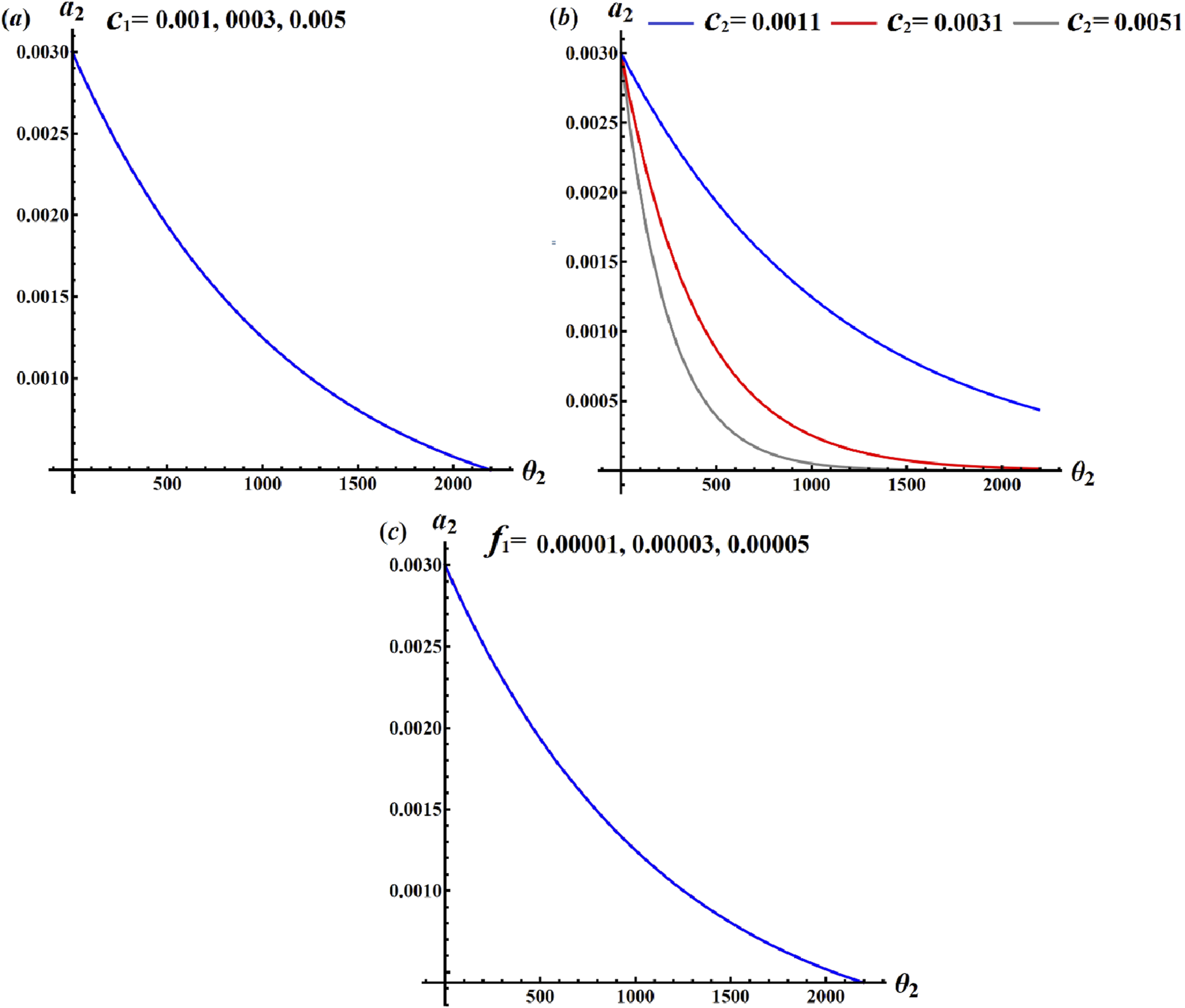
As shown in Figure 7, the spiral curves represent stability by displaying reduced deviation and maintaining a centered position, indicating that the system’s behavior remains consistent even with parameter variations. This suggests that the solutions in these regions are unlikely to undergo drastic changes, reflecting a stable condition. The convex curves in Figure 8 are stable because they exhibit smooth, predictable behavior with no sudden changes or oscillations. They consistently decrease as
Chaotic motion
This section will investigate chaotic motion, which refers to irregular and unpredictable behavior in systems highly sensitive to their initial conditions. Despite being deterministic, meaning the system’s future behavior is entirely determined by its initial state, predicting this behavior in practice is nearly impossible. Unlike random motion, chaotic motion is governed by deterministic rules. On the other hand, quasi-periodic motion lacks periodicity and randomness but still exhibits a certain degree of regularity and order. Such motion occurs when a system exhibits two or more frequencies that are not rationally related, producing a pattern that does not repeat.
Our dynamical system demonstrates the two types of motion previously discussed.
32
We will present the Lyapunov (Lya) spectrums of Diagrams of bifurcation for the solutions 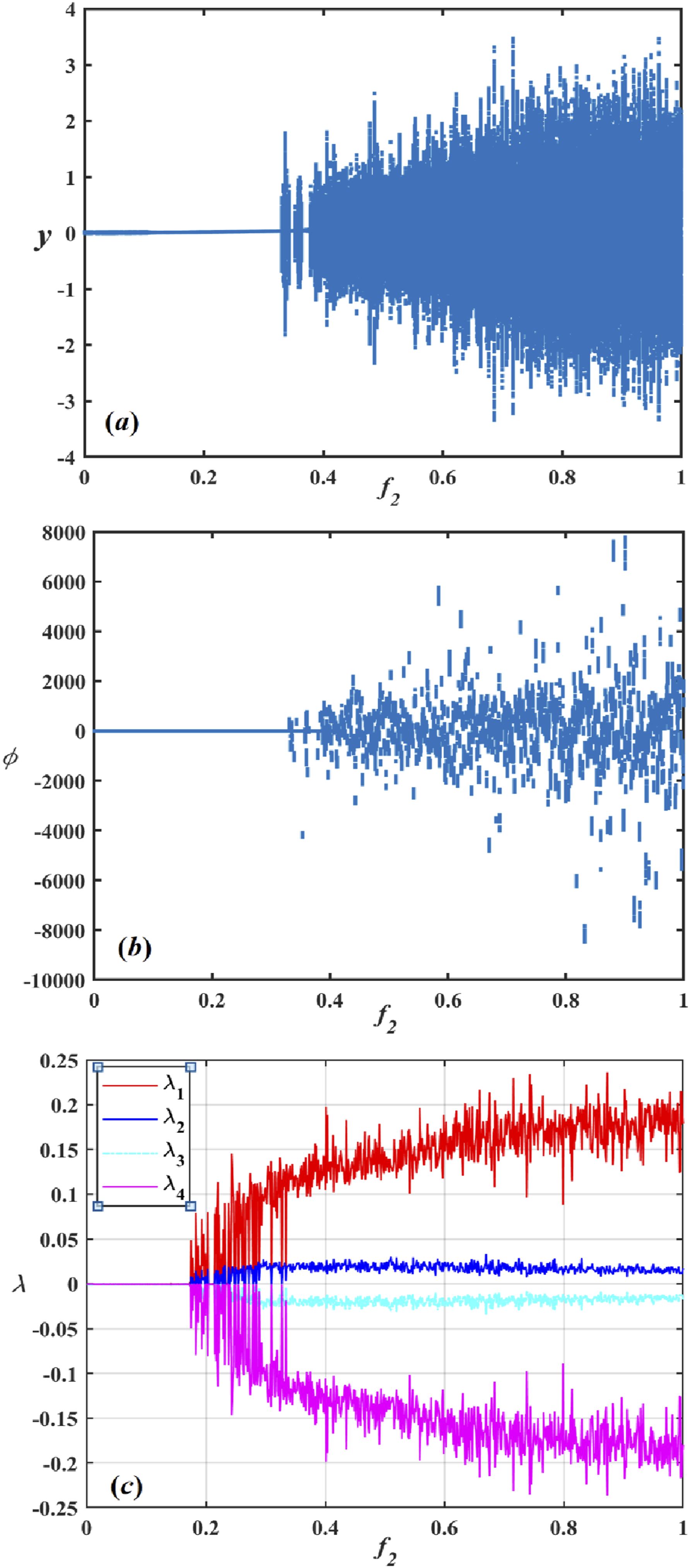
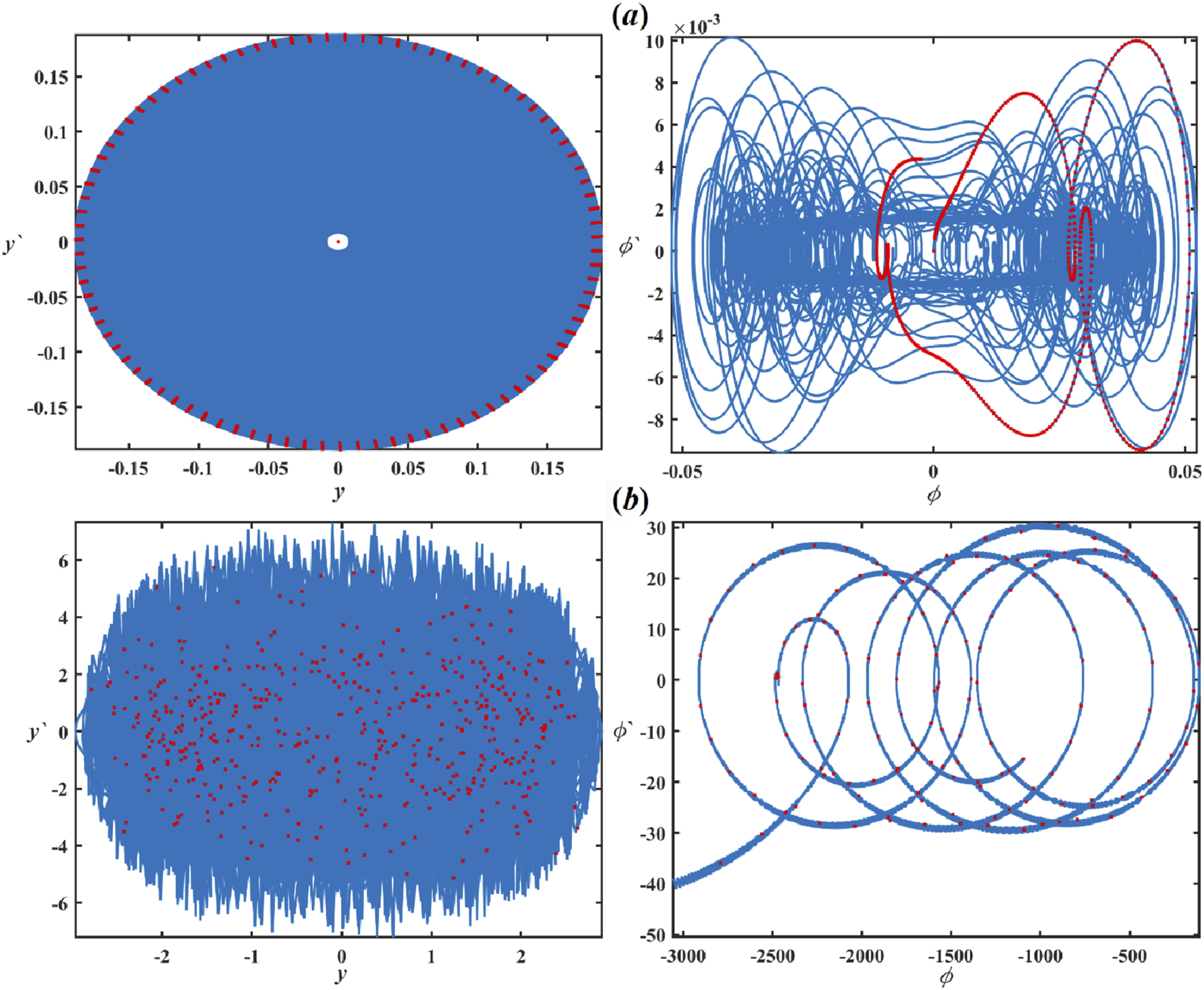
The Poincaré maps dots and phase portraits are depicted in Figures 10(a) and (b), as red dots and blue curves. In Figure 10(a), we chose a value of Poincaré maps and phase portraits for the variables 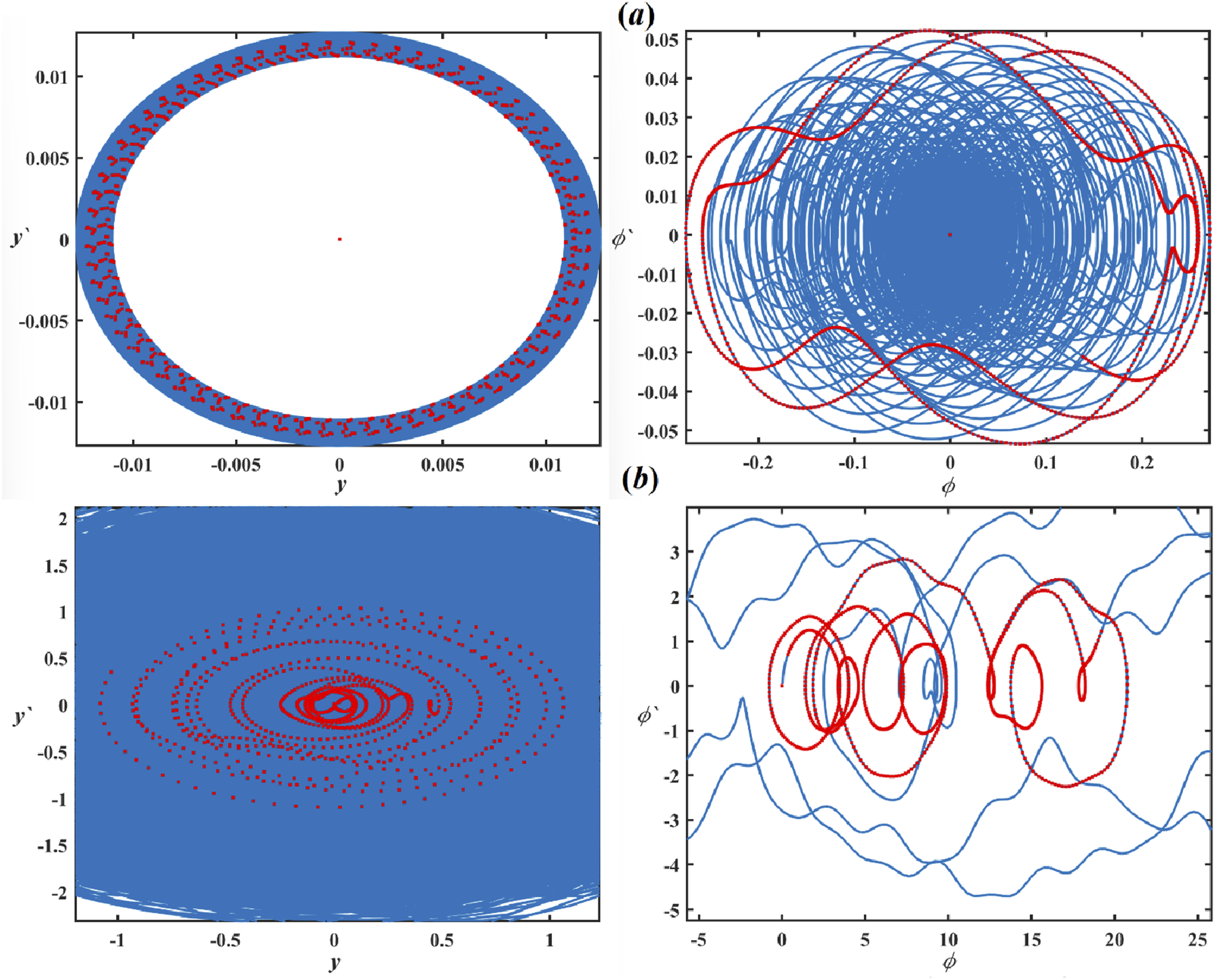
In the second scenario, Figure 11(a)–(c) illustrate a quasi-periodic sequence within the range Diagrams of bifurcation in (a) and (b) for Poincaré maps and phase portraits for the variables 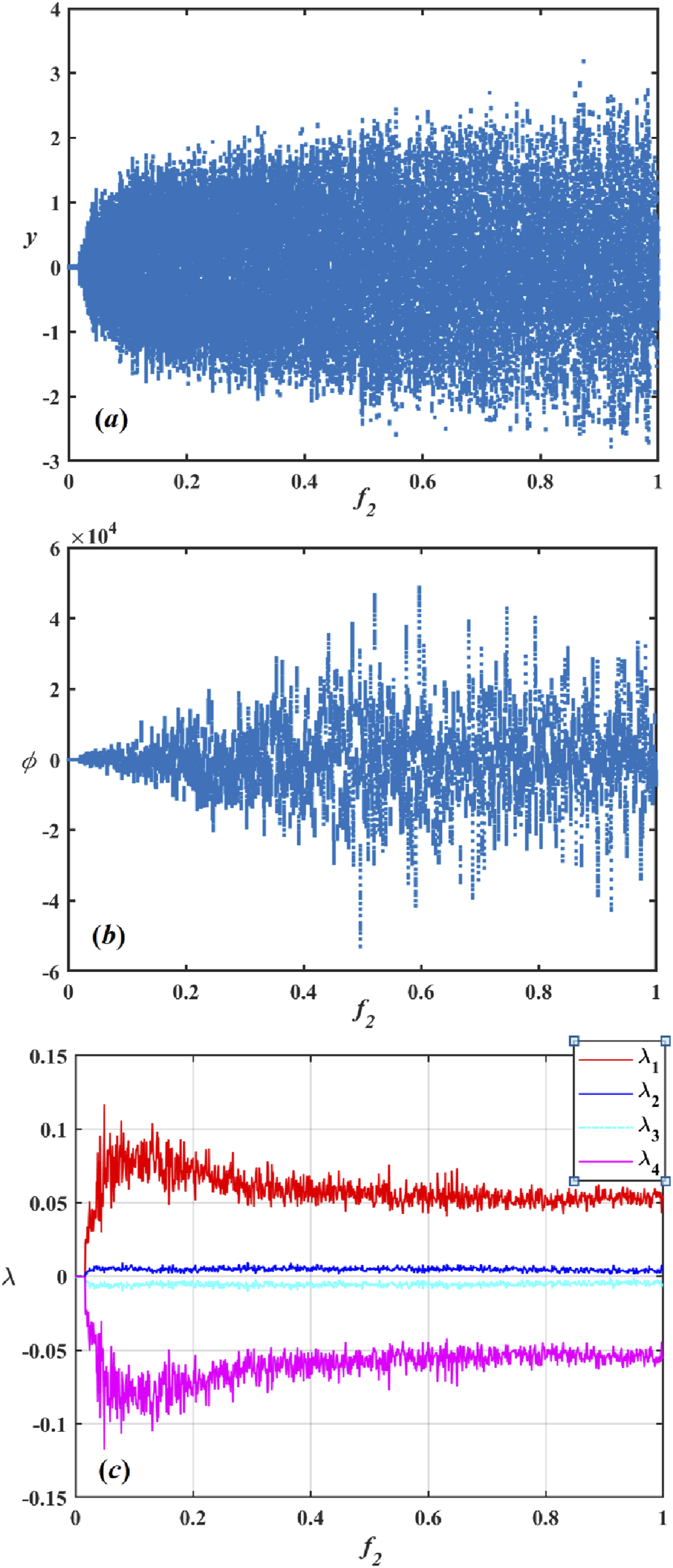
In Figures 9 and 10, positive values were selected for
The piezoelectric harvester
In this section, we include a piezoelectric harvester in our previously stated dynamical model, intending to capitalize on the advantage of generating electricity. The piezoelectric effect is the fundamental concept of a piezoelectric transducer. According to this phenomenon, mechanical stress or forces applied to quartz crystals cause electrical charges to form on their surfaces. The rate at which charge is created is directly related to the change in mechanical stress applied to the piezoelectric material. As a result, higher stress levels cause an increase in voltage output. As a result of integrating the dynamical model with the piezoelectric device, we successfully transferred mechanical energy to electrical energy.
The electrical energy produced by the EH device can potentially convert environmental vibrations, such as those from footsteps, traffic, or wind, into electricity via piezoelectric materials. This energy could then be stored or used to charge devices, providing a sustainable and renewable power source. Consequently, piezoelectric panels could be strategically placed on surfaces such as floors, sidewalks, or highways to capture kinetic energy from pedestrians or vehicles.
The piezoelectric transducer was incorporated into our dynamical model and subjected to a resistance Time series of Behaviors of 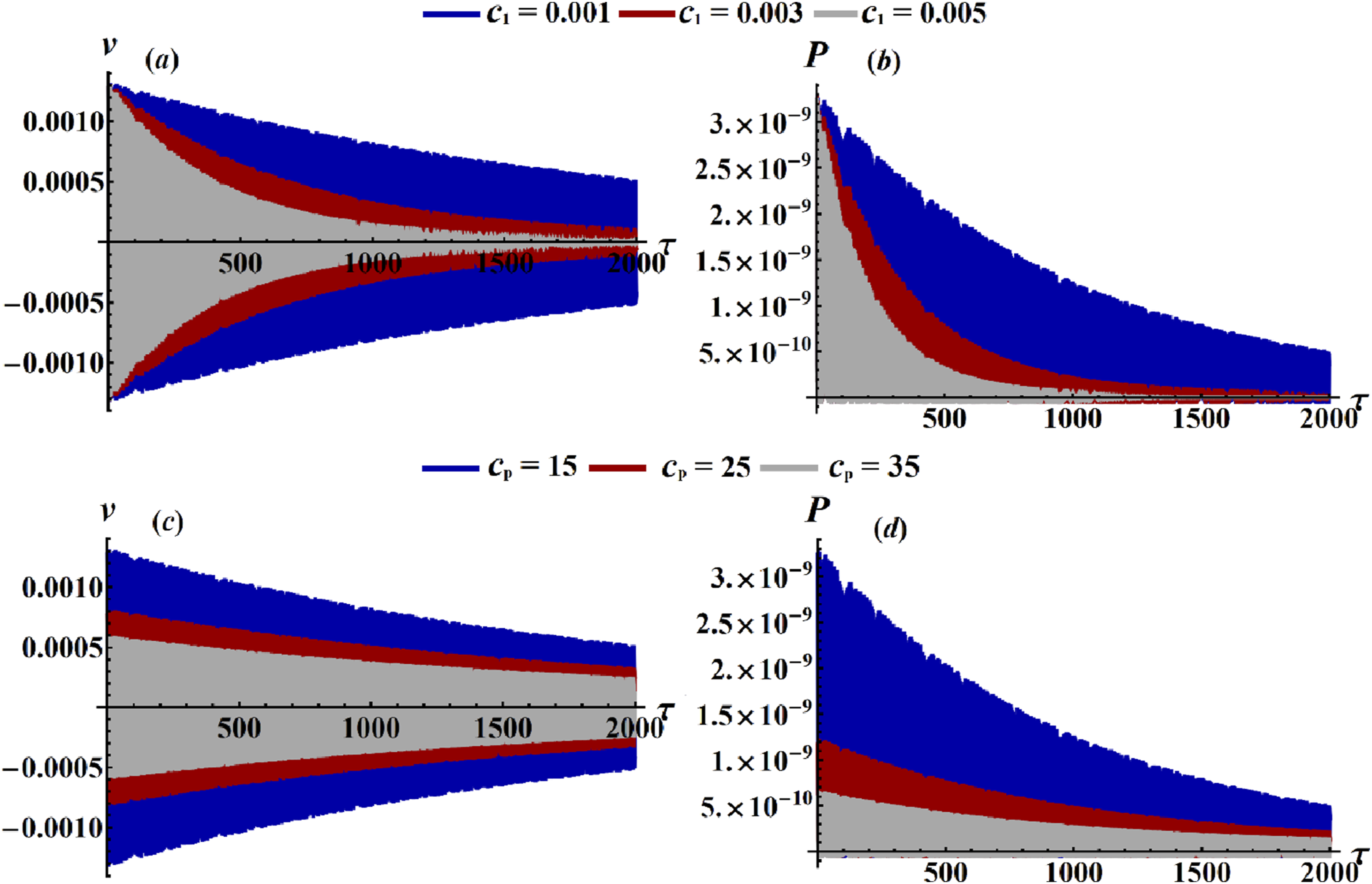
Stability analysis
This section examines the fluctuations in the obtained solutions and conducts a stability analysis in the steady-state regime. As the system’s damping suppresses transient phenomena, steady-state vibrations become more prominent, as indicated in Ref. 33. To enable this analysis, equation (29) was reformulated from a set of ordinary differential equations into a system of four algebraic equations based on the assumption that the time derivatives of the amplitudes and phases were zero, signifying that the system had attained a steady-state condition.
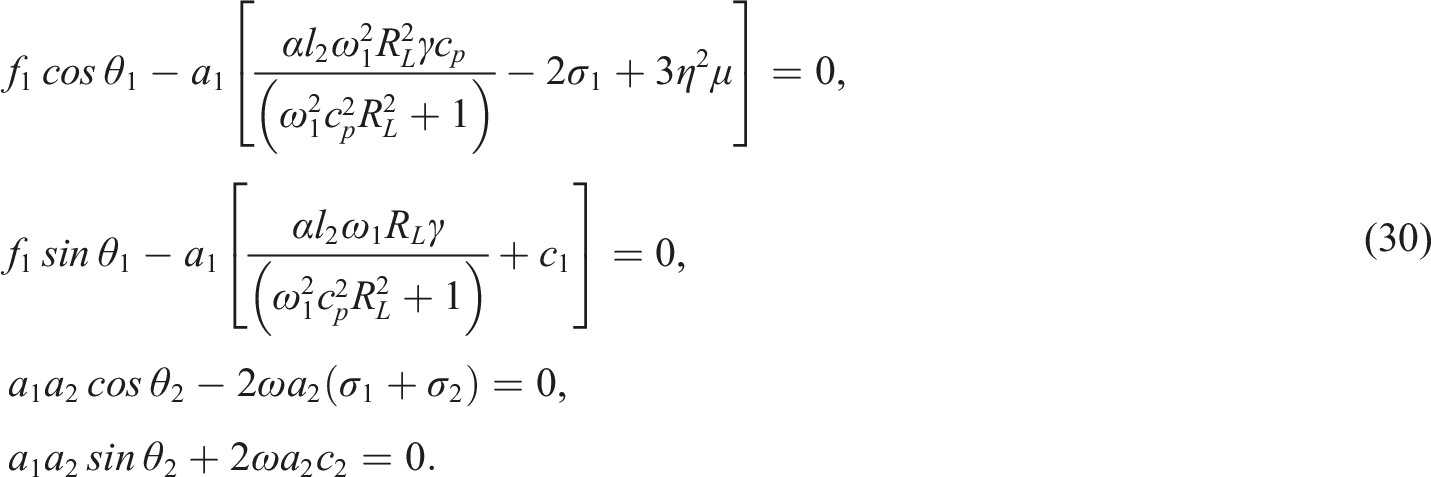
Further examination of this system indicates that by eliminating the phase variables, a resulting set of nonlinear algebraic equations governing the amplitudes and frequencies can be derived. These equations are obtained from equation (30).

Considering that the functions

Lyapunov’s theory establishes that a necessary condition for asymptotic stability is that all eigenvalues must have negative real components. When this criterion is satisfied, the fixed point that converges to the steady-state solution demonstrates asymptotic stability. To evaluate the stability of these fixed points, we will use the resonance curves derived from equation (31).
The Routh-Hurwitz criteria, which delineate the essential and sufficient conditions for solutions at steady-state, can be articulated as follows

In our analysis, red points indicate stable fixed points, while black points denote unstable ones. In Figure 15(a) and (b), we notice that in Resonance curves of 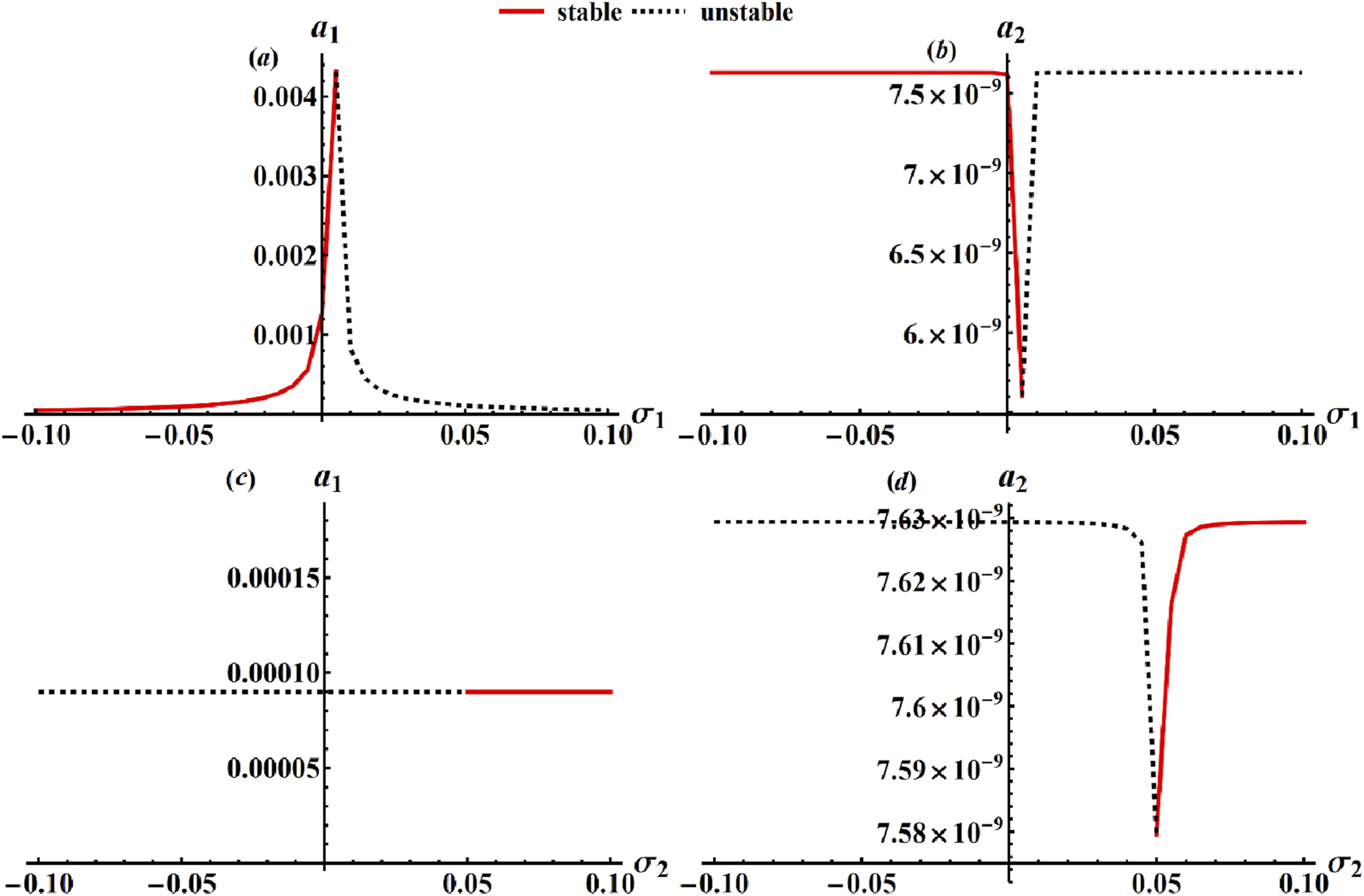
On the other hand, as we see
Conclusion
A 2DOF system was studied, consisting of a damped Duffing oscillator as the primary element and coupled with an unstretched pendulum. Additionally, a piezoelectric transducer was incorporated into the dynamic system. The governing equations were derived using Lagrange’s equation and solved asymptotically through the MS, yielding solutions accurate up to the second-order approximation. Solvability conditions and modulation equations were determined for various primary external resonance cases. Stability and instability regions were identified and analyzed through corresponding plots. The accuracy of the asymptotic solutions was verified by comparing them with numerical results. The time histories numerical solutions were analyzed to evaluate the effects of different parameters, including both conventional and piezoelectric parameters, on the system’s behavior. The system exhibited two distinct types of motion: quasi-periodic and chaotic, which were illustrated and analyzed using bifurcation diagrams, Poincaré maps, and Lyapunov spectra. The influence of varying detuning parameters on the ranges of quasi-periodic and chaotic behaviors was also explored. Additionally, the effects of varying parameters such as excitation amplitude, coupling coefficient, capacitance, and damping coefficient on output voltage and power were visually demonstrated. Resonance response curves were used to depict the system’s stability and to identify stable and unstable fixed points. The piezoelectric transducer was shown to have various applications, including gas igniters, displacement transducers, medical ultrasound devices, and crystal oscillators, smart roads like the Piezoelectric Energy Harvesting Road in the Netherlands harness energy from vehicle vibrations, while buildings in Hong Kong capture energy from wind and human activity. In healthcare, piezoelectric transducers are essential for ultrasound imaging, providing high-resolution internal images. These devices also facilitate active vibration control in aircraft, exemplified by NASA’s Adaptive Wing Technology, and enable precise movements in robotic grippers. Additionally, wearable health monitors use piezoelectric sensors for real-time physiological tracking, and smart fabrics generate electricity from body movements. Furthermore, piezoelectric sensors enhance earthquake detection in the USGS Seismic Network and provide tactile sensations in haptic feedback devices. Overall, these diverse applications highlight the significant impact of piezoelectric technology.
Footnotes
Author contributions
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
All data generated or analyzed during this study are included in this published article.
Appendix