
Abstract
Blade Tip Timing Technology (BTT) is a new type of blade vibration measurement method with non-contact measurement capabilities, which is associated with high efficiency and convenience. However, due to under-sampling feature of the BTT signal, the method can only measure part of the vibration information. Therefore, various BTT spectral reconstruction algorithms have been developed based on the under-sampling feature and sparsity of the blade vibration spectrum. Because of the harsh working environment of the blades, BTT signal typically contains high-level Gaussian noise in actual measurement, which significantly reduces frequency-domain sparsity and even aliases the vibration modals, resulting in a decrease in the performance of sparse reconstruction algorithms. In this paper, a multi-sequences BTT signal noise reduction method is proposed, which is based on sparse representation to suppress Gaussian noise. Through appropriately modifying the constraint in the ℓ0 optimization problem, the method filters out the noise elements in the sparse vector of the BTT signal. Then, denoising is completed by sparse inverse transformation. Finally, a global average-based singular value decomposition dictionary learning algorithm (GA-K-SVD) is proposed to generate an over-complete sparse dictionary which is adaptable to the original signal, to increase the effectiveness of GA-K-SVD. At last, simulation and experience are carried out to verify the performance optimization effect for sparse reconstruction algorithm and the effectiveness of proposed noise reduction method.
Keywords
Introduction
Rotor blades are the key components of compressors, turbines, and other aero-engine machinery. They usually work in high temperature, alternating aerodynamic pressure and high centrifugal force environments, each of which will reduce their fatigue life rapidly, and eventually lead to cracks or even blade fracture. In the case of serious engineering accidents,1,2 blade failures are mainly caused by high cycle fatigue damage, that is, resonance-based fatigue damage. Online measurements of the vibration state of blades can effectively prevent this risk and provide early warning of any damage caused by abnormal vibration. Recently, blade tip timing (BTT) technology is widely applied in the field of blade vibration online measurement, which is a non-contact blade vibration-based measurement technology. BTT can monitor all blades at the same time without contact, which performs better than traditional measurement methods like strain gauges. 3
The BTT technique records the actual time of arrival (TOA) of the blade tip by several probes mounted on a fixed casing. 4 Assuming that the blade is rigid (no vibration), TOA can be calculated from the rotation speed, blade angle, and probe installation angle, each of which can be expressed as functions of the expected TOA. When blades vibrate, there will be a time difference between actual TOA and expected TOA; this can be easily calculated to obtain the vibration displacement. Due to the sampling characteristics of BTT, each of the measurement probe can only collect one pulse signal per revolution, so the BTT signal is seriously under-sampled. 5
The under-sampling characteristics of BTT signals can be characterized by using compressed sensing theory during signal processing.6–10 Lin 11 first proposed a multi-coset BTT sampling model applying compressed sensing to transform the infinite dimensional sparse representation model into a finite dimensional multiple measurement vector (MMV) model. The Orthogonal Matching Pursuit (OMP) method 12 was then used to reconstruct the blade multi-modal vibration spectrum. Pan 13 proposed a sparse representation model for BTT signal based on a single measurement vector and used the Basis Pursuit Denoising (BPDN) 14 algorithm. MUSIC 15 is another class of blind spectral analysis methods which can be used in BTT spectrum reconstruction. Wang improves frequency identification effect of MUSIC by extending the batch length of the data set 16 and reduces the computational complexity by reducing the dimensionality of the noise subspace. 17
These sparse reconstruction algorithms are all implemented based on the sparsity of the blade vibration in the frequency spectrum, which have a high requirement on the quality and clarity of the original signal. Unfortunately, due to the harsh working environment of the aero-engine, the signal collected by BTT probes inevitably contains high-level Gaussian noise, 18 which greatly reduces the sparsity of the blade vibration spectrum. For sparse reconstruction algorithms, low sparsity leads to the reduction of accuracy and the increase of the computational complexity. For example, when the OMP method is dealing with noisy signals, to meet the requirements of iterative error, the number of iterations increases rapidly with the raise of noise intensity, which means great increase of the calculation time, and the high-level Gaussian noise terms will alias the frequency components of the blade vibration which is seriously aliased in BTT under-sampled stage, resulting in a serious decline in accuracy. Therefore, it is very necessary to preprocess the BTT signal. However, due to the under-sampling characteristics of the BTT signal, filters, or traditional filtering techniques, such as wavelet denoising 19 and empirical mode decomposition (EMD), 20 are very easy to mistakenly filter out the aliased blade vibration modals, which cannot be applied to BTT signal noise reduction. Therefore, new noise processing methods for BTT signals need to be developed. Cao 21 proposed two filtering methods for the BTT signal based on sampling aliasing frequency (SAFE) map, which can extract synchronous vibration and denoise the asynchronous vibration due to the clear distribution of different components in the SAFE map. Wang 18 proposed a robust sparse representation model based on Mixture of Gaussian (MoG) to reduce the impact of complex noise caused by speed fluctuation and casing vibration on the BTT sparse model. In this paper, we conduct noise reduction on BTT signals through sparse representation.
In the past decades, using of sparsity as the driving force of image and signal denoising has attracted a lot of research attention,22–26 and sparse signal reconstruction algorithms have been introduced to solve these image denoising problems. To simulate these poor fidelity images, the signals are sparsely represented as the product of a fixed dictionary and a sparse vector by solving a ℓ0 optimization problem. 27 Next, a suitable constraint condition is chosen for the ℓ0 problem, and the noise modals with smaller weights in the sparse vector are discarded. The image information modals with larger weights can be retained and the noise level is reduced. The image processing methods imply that BTT signals can be denoised in a similar way.
Inspired by compressed sensing and image denoising methods, this paper proposes a multi-probe and multi-modal BTT signal denoising method. Based on the non-sparse spectral characteristics of the noise signal and the sparse characteristics of the BTT signal spectrum, the sparse representation is used to separate noise and BTT signal components on a sparse basis, which achieve noise reduction effect. To obtain a sparser solution, we propose a Global-Average-based Singular Value Decomposition dictionary learning algorithm (GA-K-SVD) to optimize the denoising process. The Global Averaging method aims to reduce complexity of the computation by dividing the multi-channel BTT signal into multiple blocks, applying sparse representation denoising to the signal, and finally obtaining the denoised signal through global averaging. The dictionary learning algorithm can update the dictionary iteratively to approach the globally optimal solution that minimizes the block’s sparse representation error using a learning dictionary. GA-K-SVD algorithm can not only improve the clarity of the BTT signal but also improve the sparseness of the signal spectrum to allow sparse reconstruction algorithms have better performance in reconstruction of blade vibration signal.
BTT sampling principle
This section will explain the BTT sampling principle and prove the under-sampling characteristics of the BTT signal in the frequency domain, which provides a theoretical basis for applying sparse representation for BTT signal denoising.
Representation of blade tip displacement
As shown in Figure 1, an optical-fiber sensor is randomly or equidistantly embedded in the casing. The sensor will continuously emit light signals and receive light signals. When each blade passes the sensor, the blade tip will reflect from the light signal, and the sensor will receive the light signal and generate a pulse. Thus, there will be a time-delay offset between the pulses Blade tip timing sampling principle.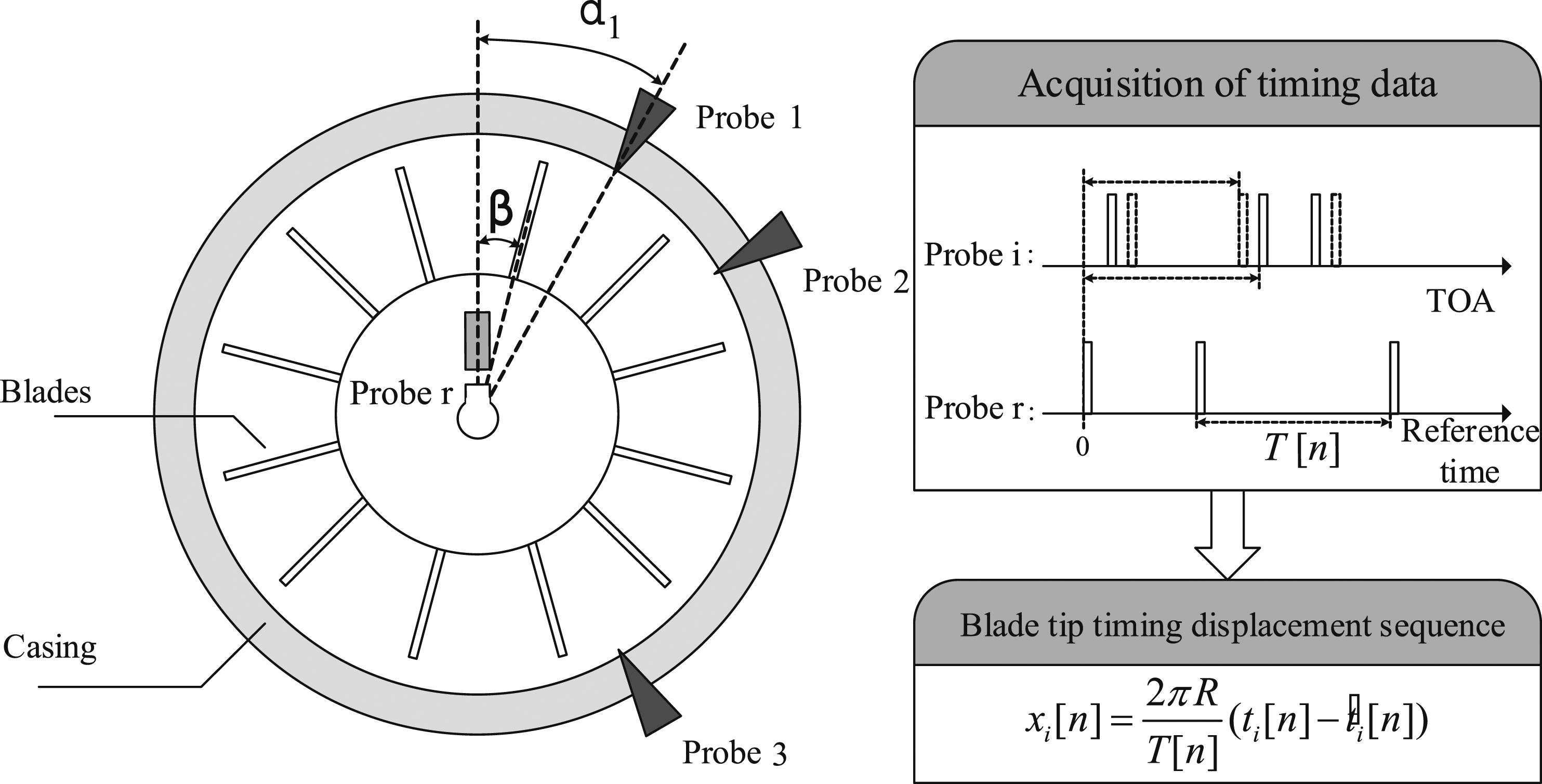

The deviation of

Through equations (1) and (2), it can be seen that the sampling frequency of the BTT technology is equal to the product of the number of sensors and the rotation frequency. For the high-frequency vibration that rotating blades usually occur and the limit of sensor number, the BTT signal is usually under-sampled. Accurately reconstructing the blade vibration signal from BTT signal is also a key issue, but we won’t go into the details of signal reconstruction in this paper. The multi-channel BTT signal which has collected data from N revolutions can be represented as a multidimensional vector Y

Sparsity properties of BBT signals
The vibration of the blade is caused by broadband shock excitation, airflow shock, for example, under the influence of these exciting forces, the blade will generate multi-modal vibration, and its response can be simulated with a multi-degree-of-freedom model (MDOF) Blade vibration spectrum. Various narrow bands with bandwidth { B
i
} surround the dominant frequencies.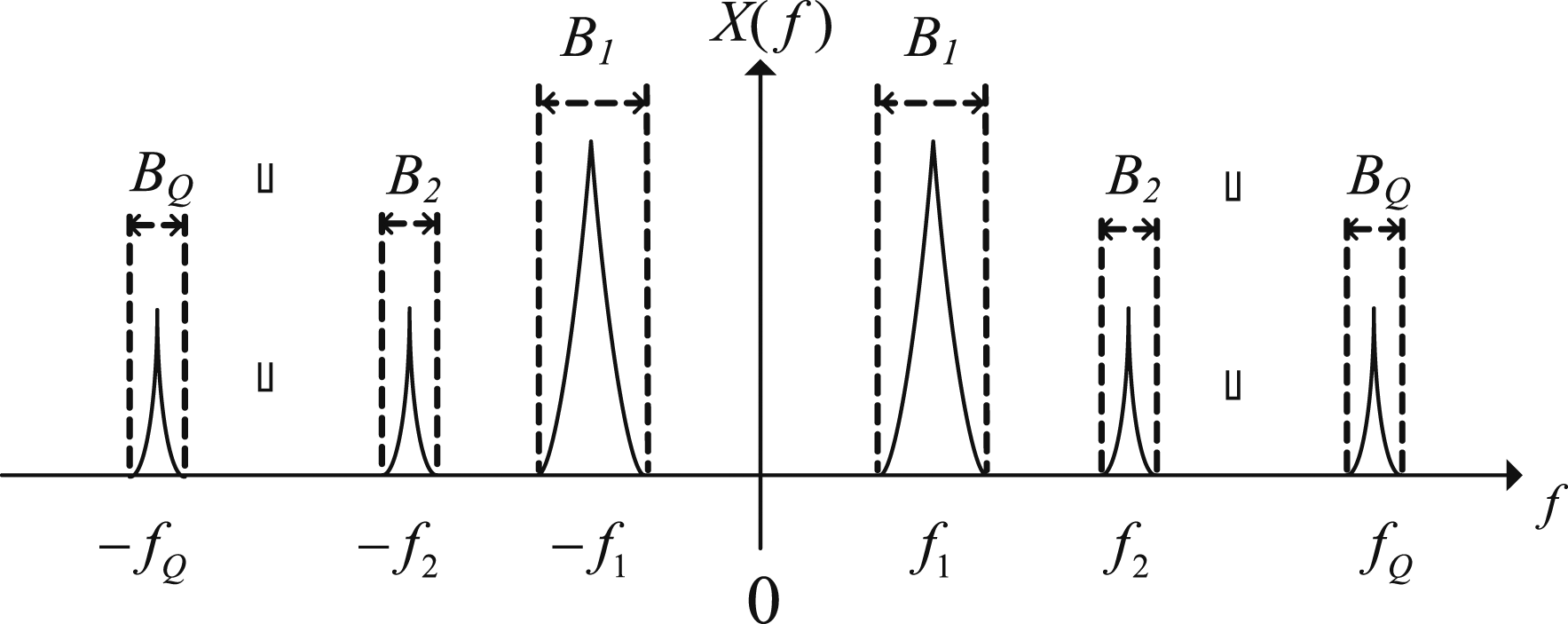

Compressed sensing
In compressed sensing theory, this property of the BTT signal means that the signal can be sparsely represented. Utilizing the sparsity of a signal x, sparse representation can represent x as a linear combination of few atoms of a sparse dictionary D, where atoms are the column vector of D. The vector α decides which atoms are used to represent the signal. Since only few atoms are selected, α is sparse. Therefore, the sparse representation process can be expressed as follows. (Figure 3). Sparse Representation Schematic, where the blank parts in x represent non-zero elements and the blank columns in D represent selected atoms.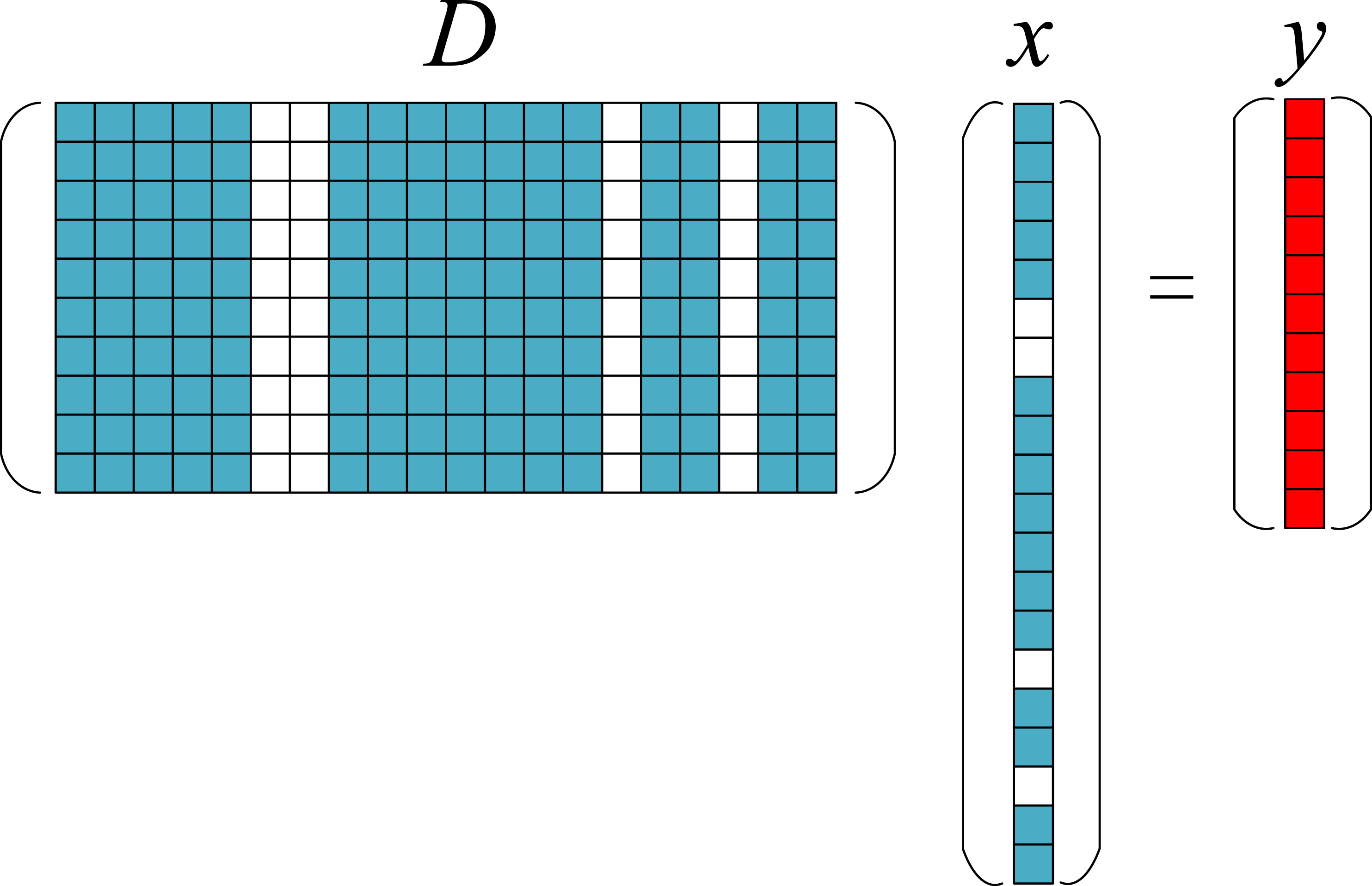

The unknown item, sparse vector α, can be obtained by solving the following ℓ0 problem:

BTT denoising principle
The sparsity of the BTT signal in the frequency spectrum means that it can be represented by a sparse vector via a Fourier-based dictionary. However, due to the harsh working environment of aero-engines, BTT signals usually contain high levels of (Gaussian) noise. The low autocorrelation of noise means that its sparsity in spectrum is very poor, as shown in Figure 4(b), to its corresponding sparse vector. The BTT signal spectrum energy is concentrated in several specific narrow frequency bands, while the energy of the additive Gaussian noise is scattered along every frequency. Therefore, the sparsity of the noisy BTT signal is greatly reduced, which seriously affects the accuracy of the sparse reconstruction algorithm. This provides us with new inspiration for BTT signal noise reduction preprocessing. (a) A sparse signal spectrum, only a few elements are not zero. (b) A Gaussian noise spectrum, which is not sparse, and the amplitudes are average.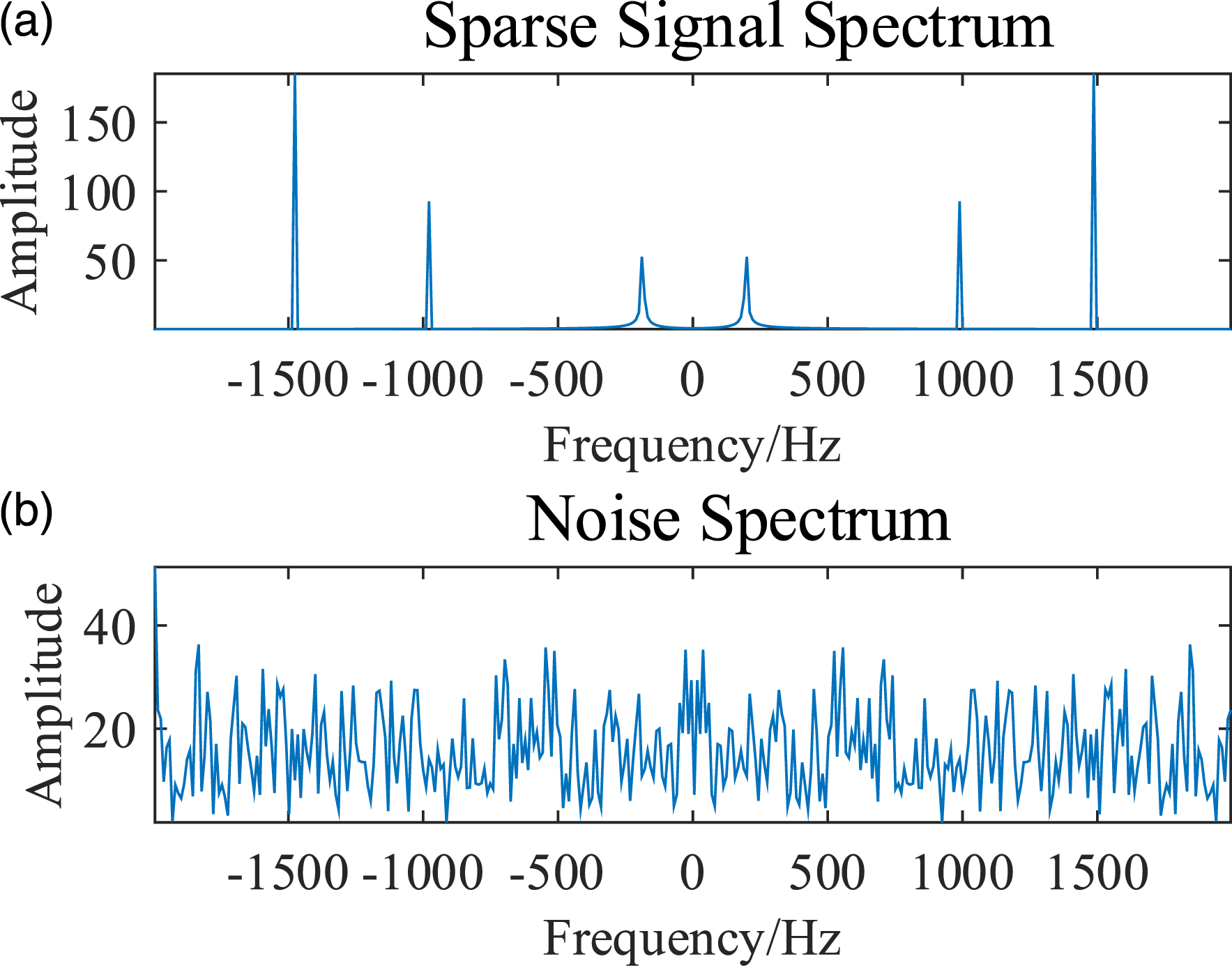
To describe the model of equation (6) more accurately, a bounded error should be allowed to replace the original constraints, which means that equation (6) can be written as

To facilitate the understanding of the follow-up content, the constraint term can be written as the penalty term

Combining this principle, we only need to solve the ℓ0 problem of equation (7) or equation (8), and then perform sparse inverse transformation on it, and then we can get the preprocessed signal with greatly reduced noise level.
GA-K-SVD algorithm
Based on the theory explained in Section 3, solving for sparse vectors is the key to BTT signal denoising. It is true that we can use traditional sparse reconstruction algorithms (OMP, BP, etc.,) and common fixed dictionaries for a simple noise reduction; however, such methods cannot meet the real-time and high-precision vibration monitoring requirements of the BTT technology. Therefore, we propose a Global Average-based K-SVD algorithm (GA-K-SVD) as a new BTT signal denoising method. Among them, the Global Average method can effectively reduce the complexity of computation without affecting the noise reduction effect, which is closer to real-time requirements; the improved K-SVD algorithm can obtain a sparse dictionary that can obtain a sparser solution and improve noise reduction effect and modal retention.
Global average method
The multiple BTT signals are integrated into an
Therefore, we propose a Global Averaging method to achieve a better balance in the abovementioned problems. The method uses a sliding block to divide the original signal matrix Y into signal patches y
j
, as shown in Figure 5. Figure 5 shows that an Schematic diagram of using sliding block to cut up signal patches. Each patch contains an 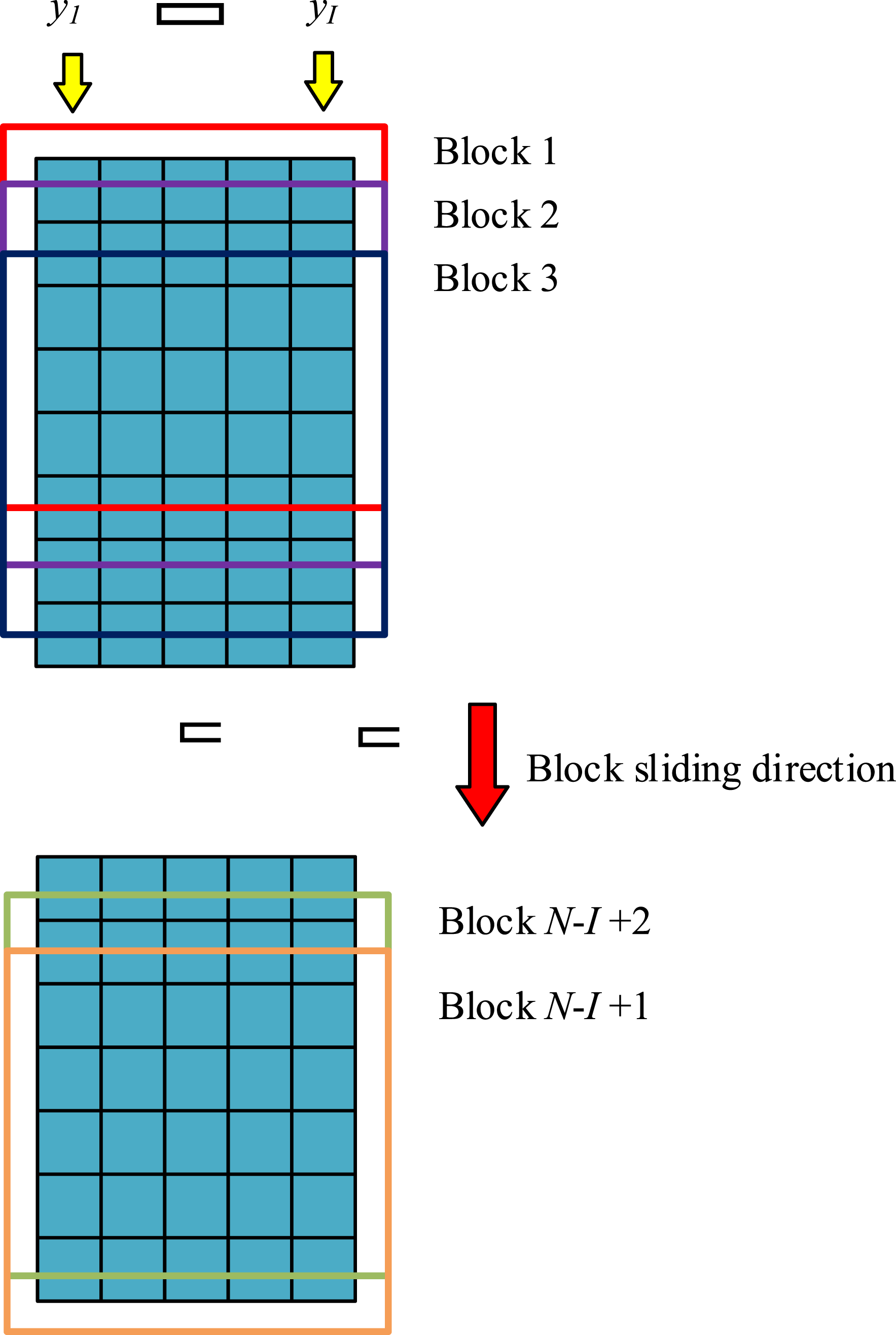

Where

Based on the principle of simplified processing, OMP algorithm is applied, which selects a most relevant atom in each iteration and stops when the residual


Equation (12) is meant to globally average denoised patches with some relaxation obtained by averaging the original noisy signal.
Improved K-SVD algorithm
Of course, if a sparser solution can be obtained, the screening of noise components will be easier, and the sparsity of sparse vector is closely related to the sparse dictionary. In previous work, there are many choices of sparse dictionaries, such as the DCT dictionary, 28 Fourier dictionary, and 29 Gabor dictionary. 30 These dictionaries are undoubtedly a convenient choice for sparse representation work, but for BTT signals, they are not optimal sparse dictionaries. When the structural matching between the dictionary and the signal is not ample enough, there will be a problem of low sparsity. Some studies have shown that the signal sparse representation using an over-complete sparse dictionary is more effective.31–33 An over-complete sparse dictionary signifies that the number of atoms in the dictionary is much larger than the length of the signal. An over-complete sparse dictionary can obtain a sparser vector, and the restored signal has a better structural feature matching degree with the original signal. There are many methods for constructing over-complete sparse dictionaries from orthogonal basis dictionaries, such as the fractional frequency method, 34 but we still have a better choice. After simply initializing an over-complete sparse dictionary, we train a better sparse dictionary with the improved K-SVD dictionary learning algorithm.
We will elaborate on the improved K-SVD algorithm in combination with Global Average method. The known quantity is multi-channel BTT signal Y, as shown in equation (3). Where y
i
represents the i-th BTT signal. Define x as the sparse vector corresponding to the training data Y, and the matrix D is the over-complete sparse dictionary that needs to be trained. Therefore, the process of dictionary learning can be expressed as an optimization problem:

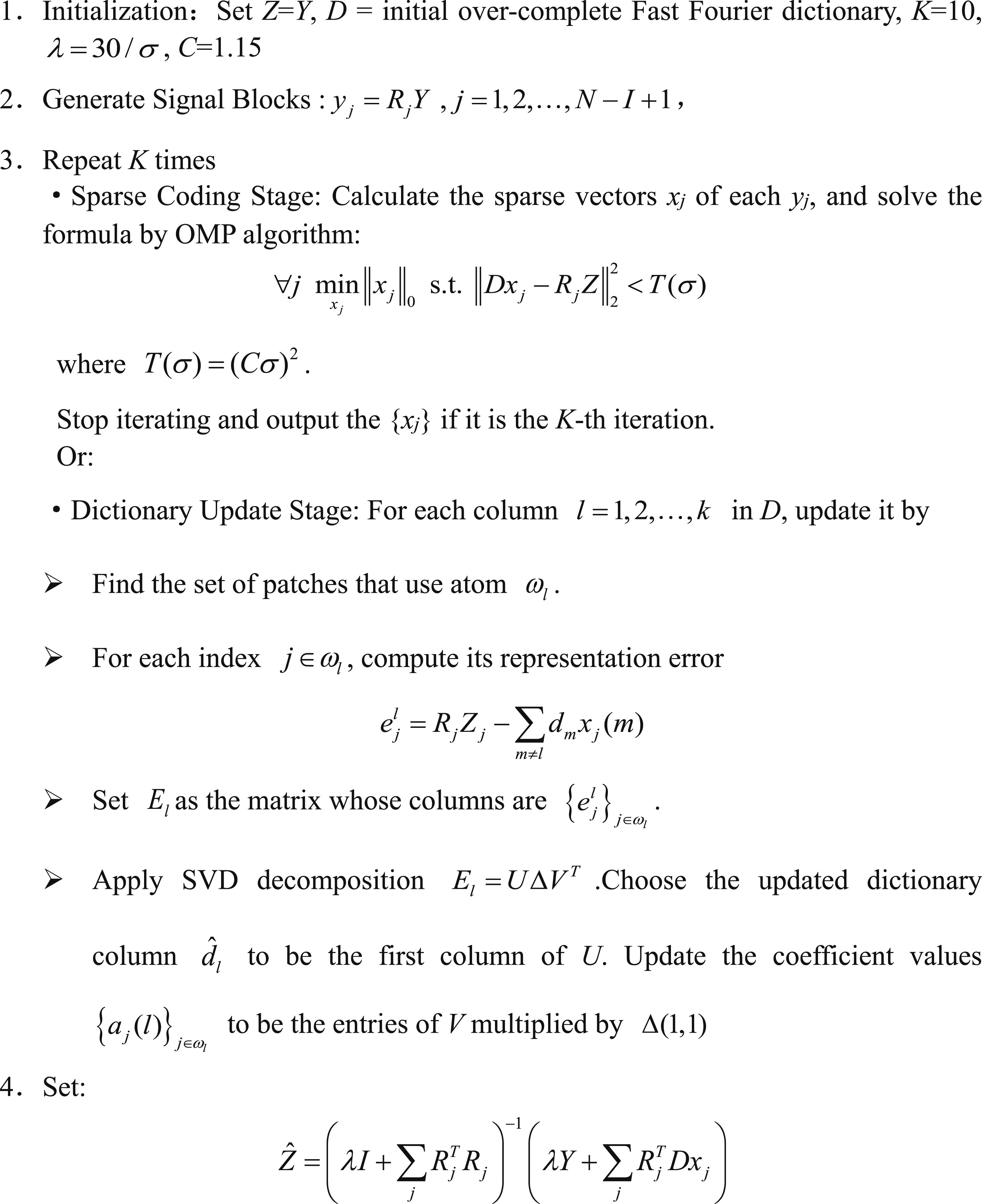
The improved K-SVD algorithm has three stages: Initialization, Sparse Coding, and Dictionary Updating.
Initialization
The first iteration requires an initialized redundant dictionary D and sparse vectors X. According to the sparse spectrum characteristic of BTT signal, we choose to construct the following over-complete sparse dictionary D based on the fast Fourier basis dictionary.

Sparse coding
Iterations start at this stage. According to the initial dictionary, the sparse vector of each training sample is solved via

The optimization problem is relatively easy since it is sufficient to use the traditional OMP algorithm to solve equation (15).
Dictionary updating
In the k-th step of iterative learning, the k-th row vector that is multiplied by the sparse vector

Define


In the iterative process, our goal is to find a {d
k
, x
k
} that will best approximate the residual, that is, minimize the error
Let

Applying singular value decomposition (SVD) to

The term d
k
is updated in the initial dictionary by decomposing to get the first column of U. The sparse representation coefficient
GA-K-SVD algorithm.

Simulation

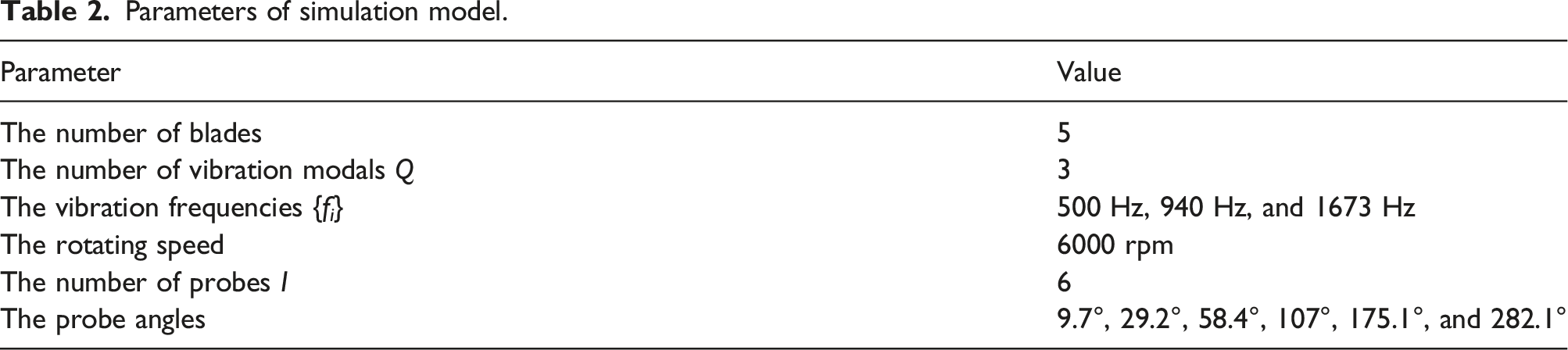
Parameters of simulation model.
(a) Blade vibration spectrum; (b) under-sampled BTT spectrum.
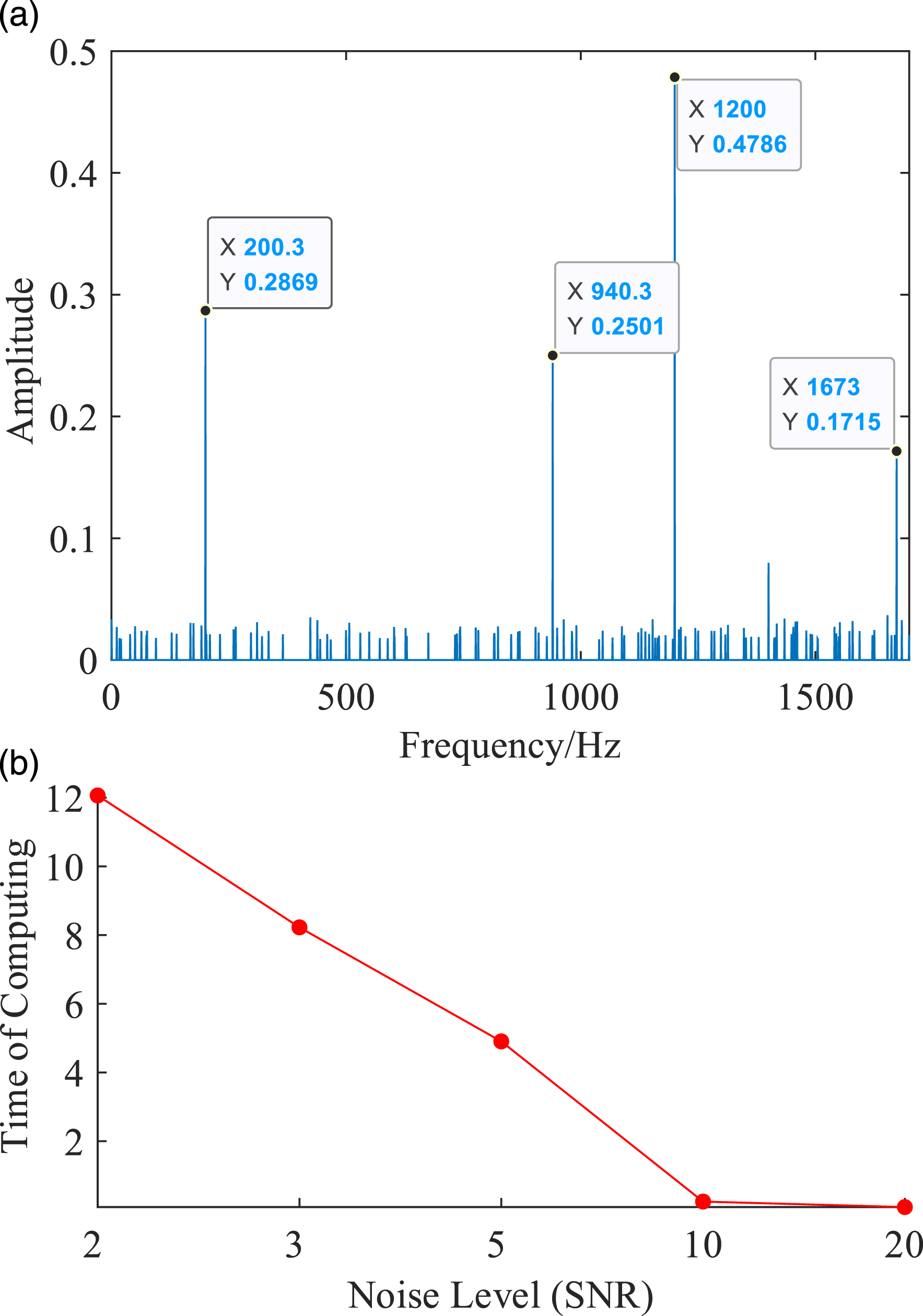
In the condition of non-noise, the spectral sparsity of blade vibration is excellent, and the sparse reconstruction algorithm can also reach the threshold after few iterations and completely reconstruct the signal spectrum, as shown in Figure 7. However, in the condition of noise, the reconstruction accuracy of the sparse reconstruction algorithm will decrease, and the number of iterations (calculation amount) will also increase greatly, as shown in Figure 8. It can be seen that the reconstruction result of the OMP algorithm has error modals, which leads to the failure of the reconstruction; and the lower the signal-to-noise ratio, the longer the calculation time of the OMP algorithm. Therefore, it is necessary to deal with the high level noise in the BTT signal. Then we will simulate the GA-K-SVD algorithm to verify its denoising performance and the improvement of the effect of the sparse reconstruction algorithm. (a) Blade vibration spectrum without noise; (b) under-sampled BTT signal without noise sampled by one of the probes; (c) reconstructed blade vibration spectrum by the OMP algorithm. (a) Reconstruction blade vibration spectrum by the OMP algorithm containing noise (SNR = 5); (b) time of computation in different noise levels.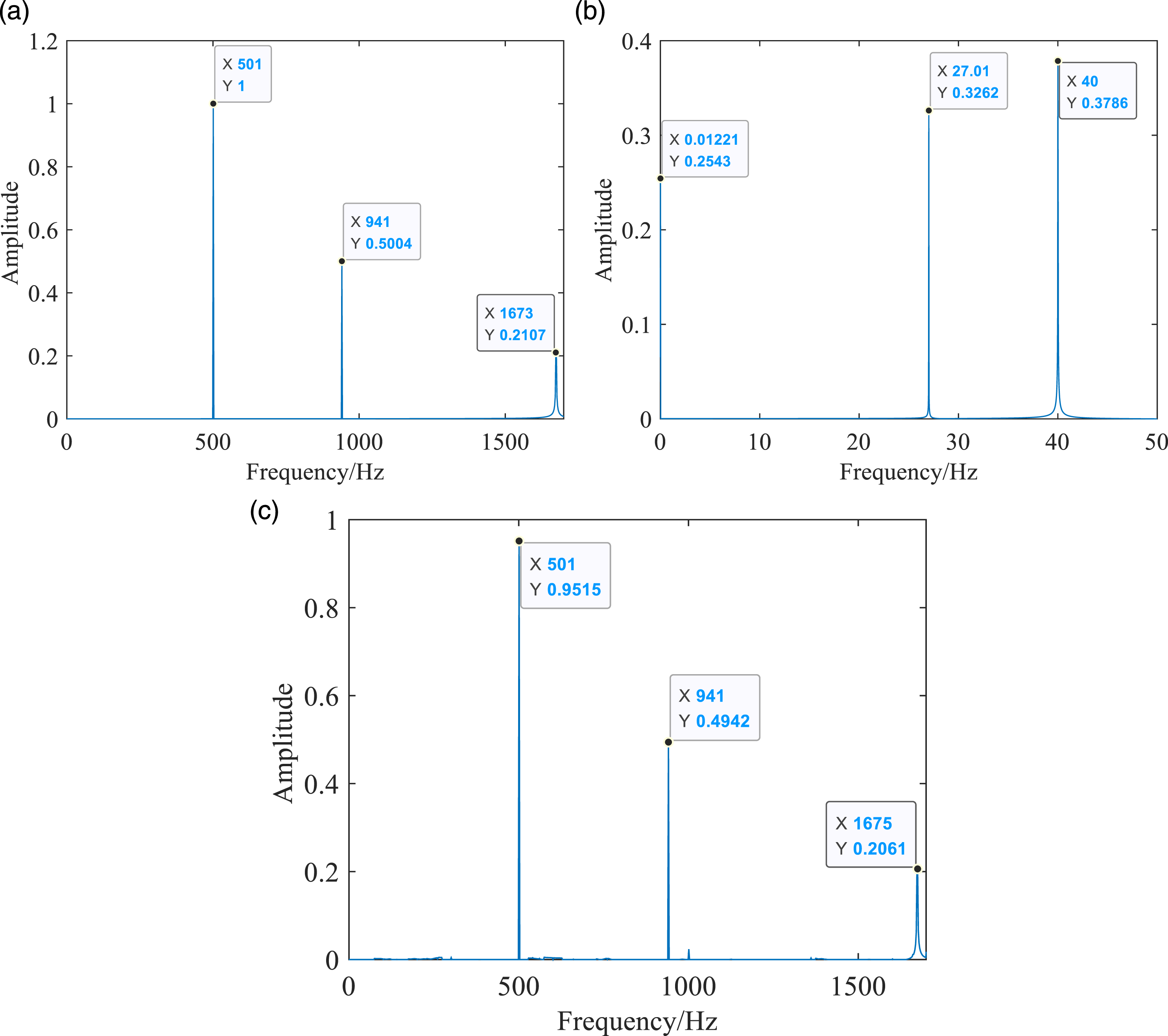
In the simulation, original BTT signal matrix Y is made up by I-columns of the BTT signal with length N = 1000. Gaussian noise is then added to Y, and the GA-K-SVD algorithm is applied for noise reduction. Firstly, signal needs to be split (see in Section 4.1). If the number of probe is 6, a 6×6 sliding window is set. As shown in Figure 5, the process of signal division starts from the first column of Y, and Y is divided into N+1-I blocks expressed as a set (a)The initialization Fourier dictionary; (b) trained sparse dictionary.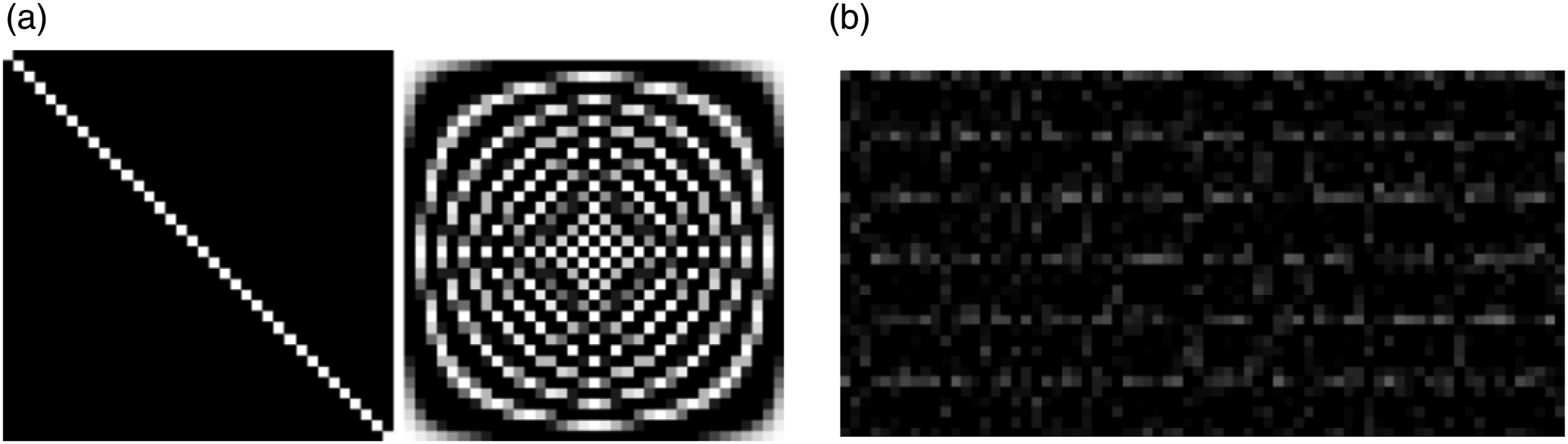
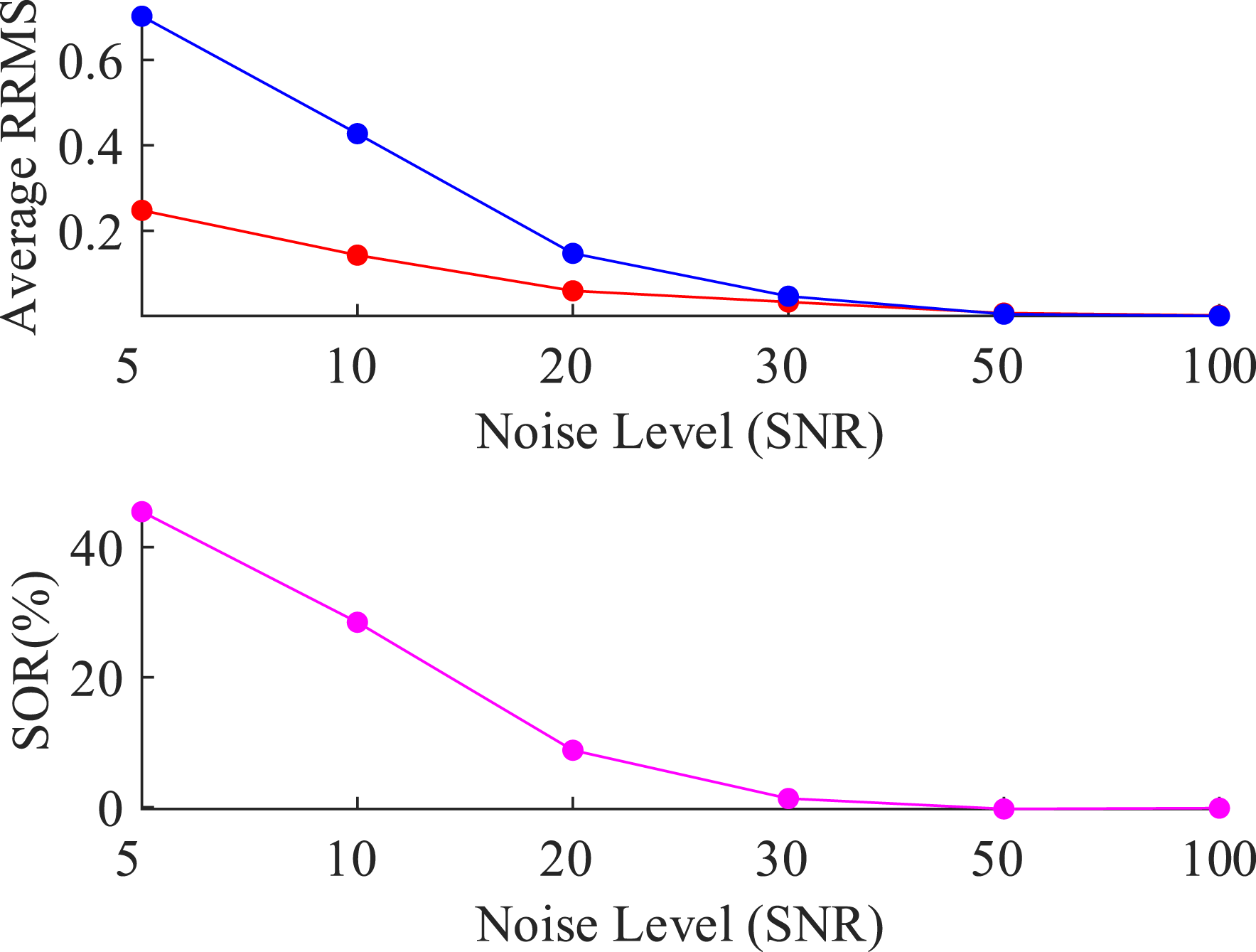
To evaluate the performance of different reconstruction algorithms, two metrics are defined. The first is the Relative Root Mean Square (RRMS), defined as follows.
The second is the Signal Optimization Rate (SOR), defined as follows.
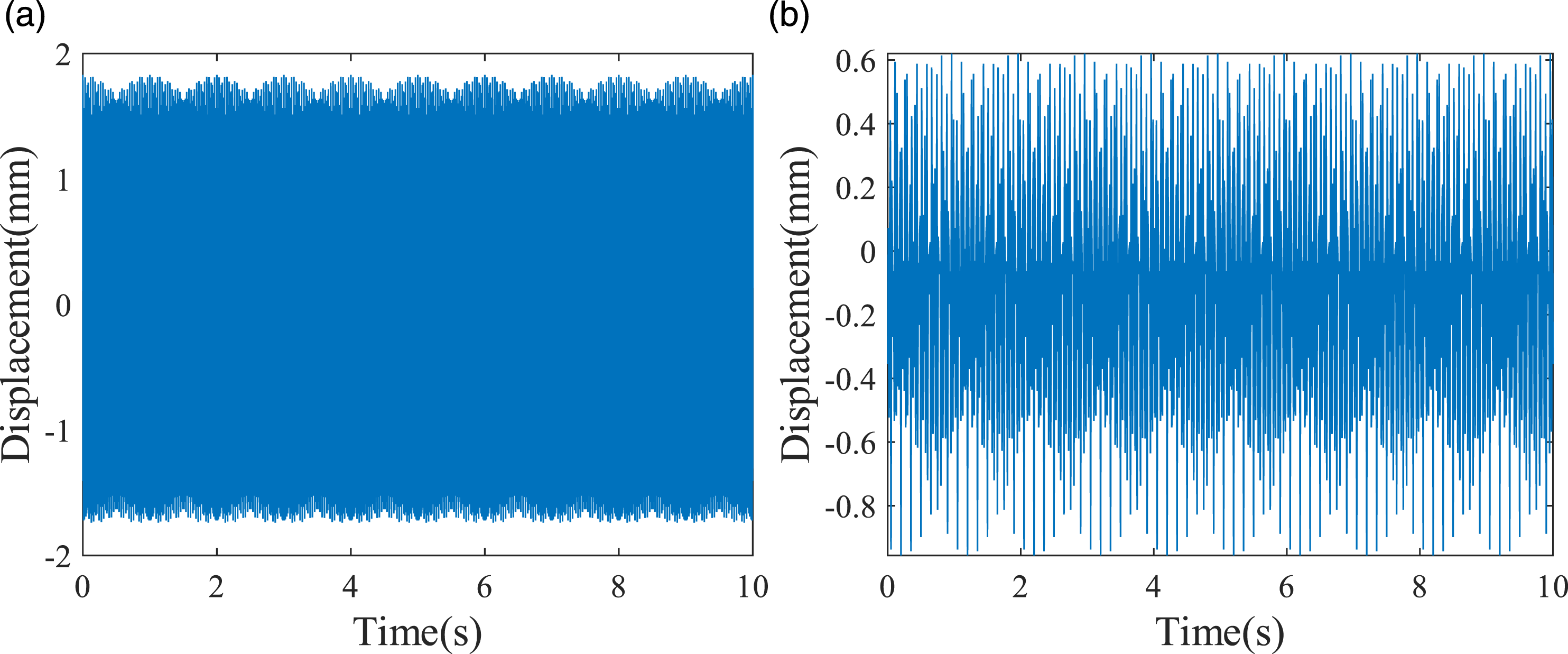
To visually demonstrate the noise reduction results of GA-K-SVD, Figure 10(c)–(e) shows the signal before and after denoising, and Figure 11 shows the average RRSM and SOR before and after denoising in different noise levels. The improvement effect of the GA-K-SVD algorithm on high-noise level signals is significant, but for low-noise level signals, the algorithm has little effect (of course, the significance of preprocessing low-noise signals is low). (a) Simulated under-sampled BTT signal without noise; (b) simulated under-sampled BTT frequency spectrum; (c) simulated noisy under-sampled BTT signal (SNR = 5); (d) simulated noisy under-sampled BTT frequency spectrum (SNR = 5); (e) simulated under-sampled BTT signal after denoising through the GA-K-SVD algorithm; (f) simulated under-sampled BTT frequency spectrum after denoising through the GA-K-SVD algorithm. RRMS of different noise levels.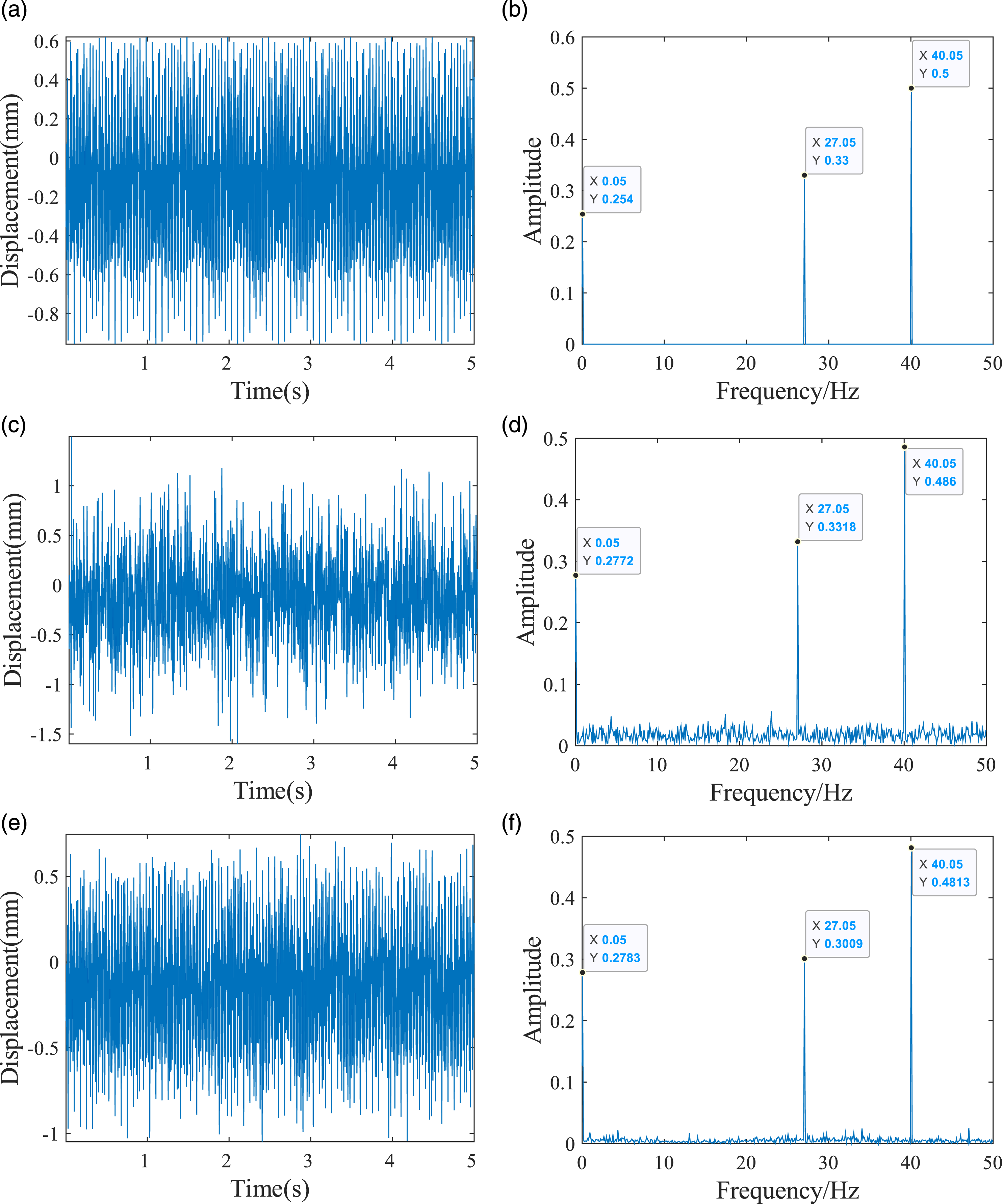
We perform a Fourier transform on the original BTT signal, noisy BTT signal, and denoised BTT signal to observe the spectrums, shown in Figure 10(b), (d), and (f). The vibration modals of the BTT signal are completely preserved after applying the sparse representation transformation, and only the amplitude of each main frequency changes slightly. This shows that the GA-K-SVD algorithm can retain most of the vibration modal information of the blade while reducing the noise level, which is important for the reconstruction of BTT signals or the identification of vibration parameters. Then, we performed sparse reconstruction using the denoised BTT signal, as shown in Figure 12. Compared to Figure 7(c) and Figure 8(a), the optimized signal can correctly reconstruct all modals of the blade vibration in 0.116 s, and the efficiency and the reconstruction accuracy have been greatly improved. Therefore, the GA-K-SVD algorithm is also of great significance to the sparse reconstruction of BTT signal. Spectrum reconstruction result through OMP after applying the GA-K-SVD algorithm.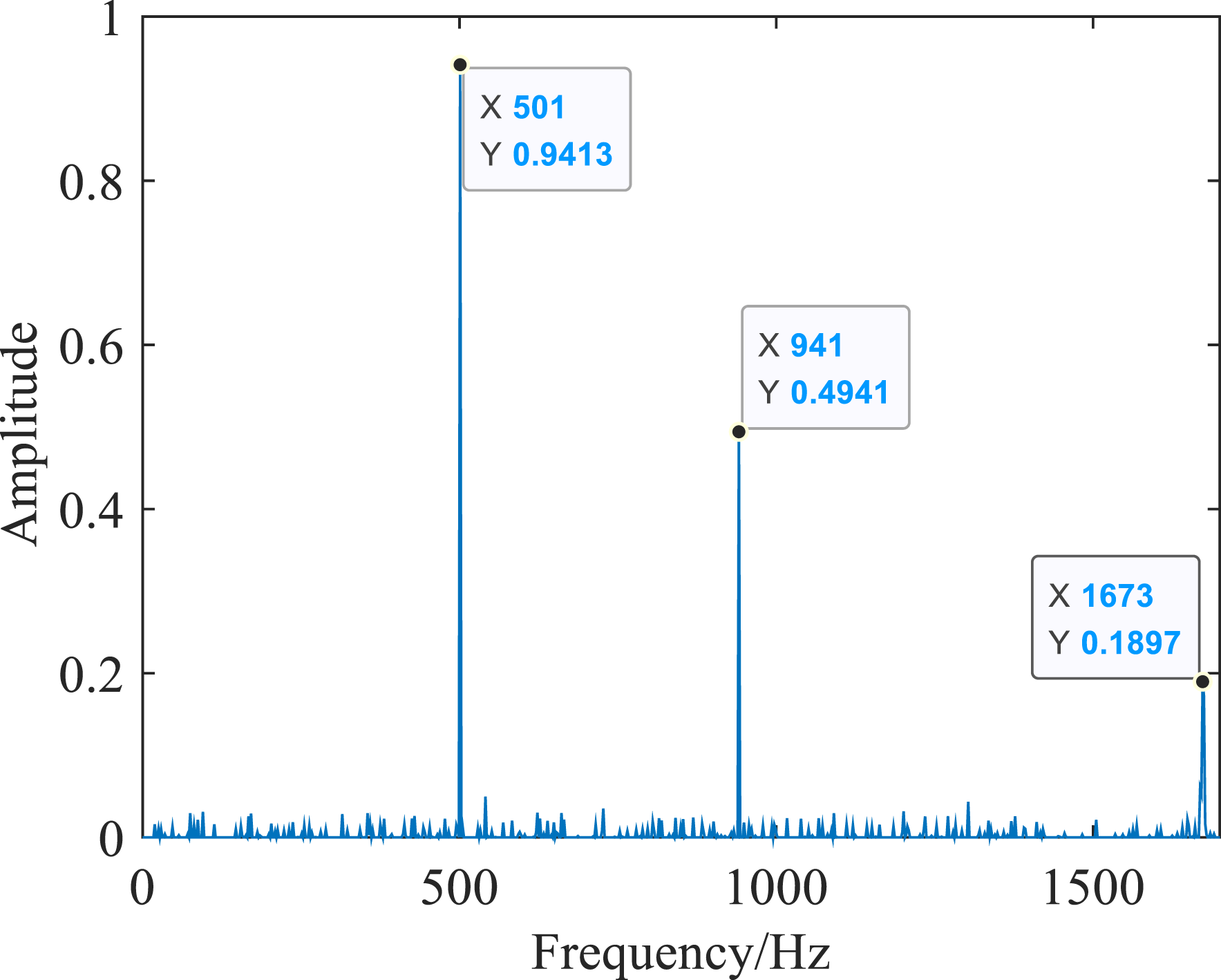
The selection of the Effect of σ parameter on noise reduction performance of the GA-K-SVD algorithm.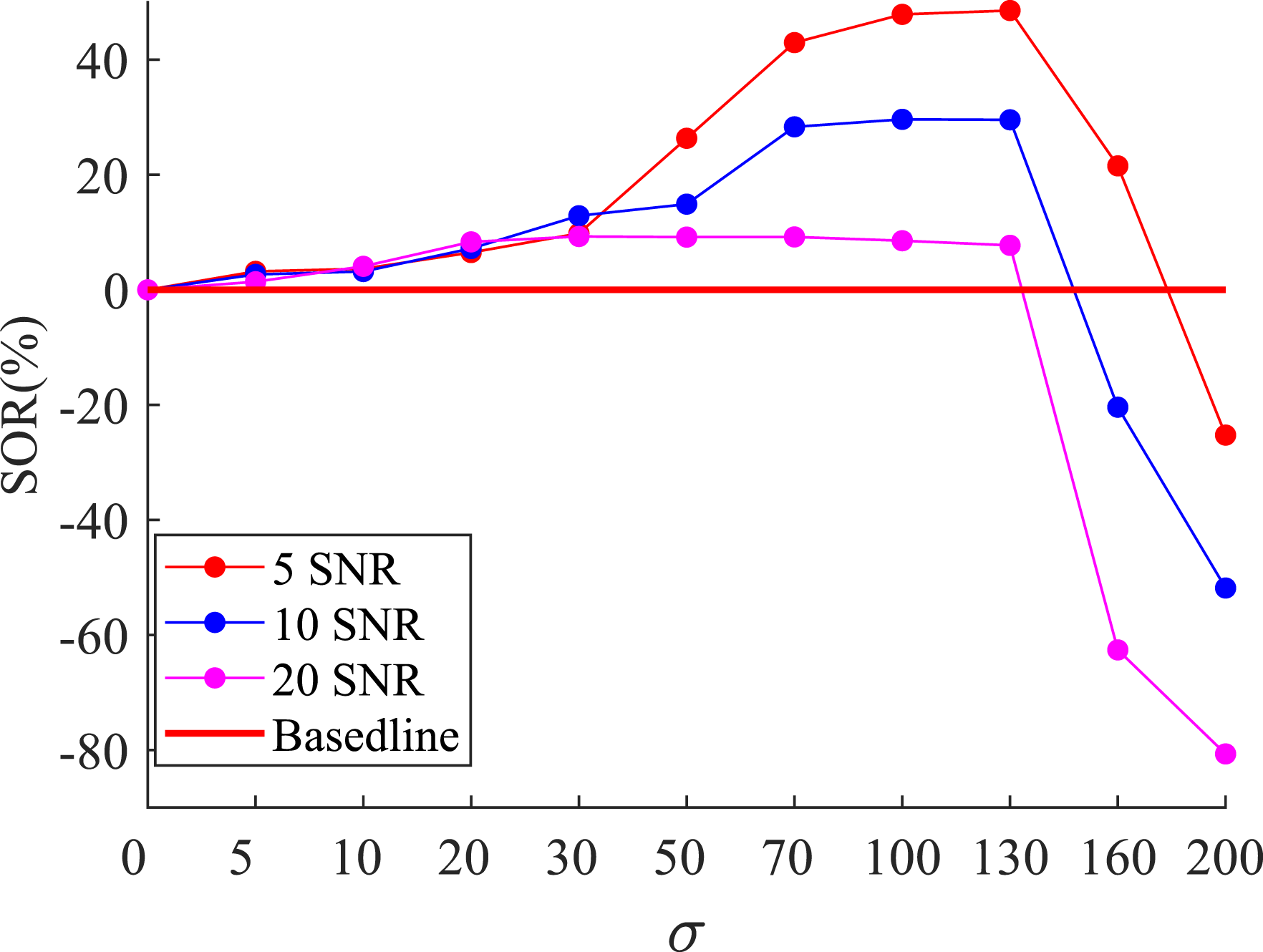
Experience
We use BTT data obtained in a test rig of a certain type of aero-engine to further verify GA-K-SVD. In this experiment, the rotational speed was 3600 rpm, and five blades are installed evenly on the rotor. Five BTT sensors are installed on the casing unevenly, and their installation angles are {0°, 42.2°, 109°, 130.2°, 322.8°}. The experiment carried out a long-term test. For the No. 2 blade, 5-channel time pulsed signals were collected by each BTT probe, and the vibration displacement of the No. 2 blade was calculated according to equation (2). The test data is shown in Figure 14(a) with a length of 1000. (a) Experiment signal with Gaussian noise; (b) denoised experiment signal by GA-K-SVD.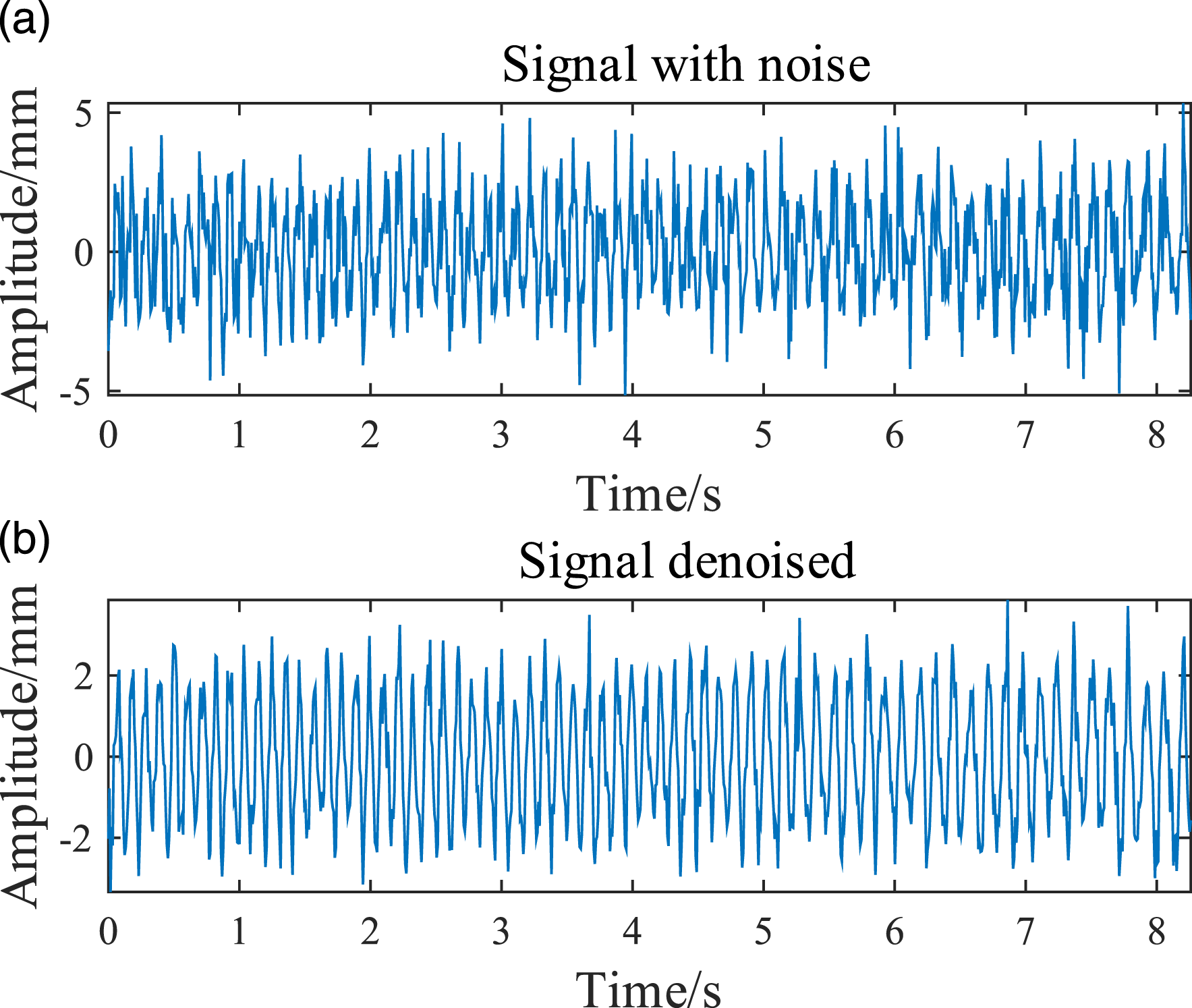
Reconstruction results of blade modals.
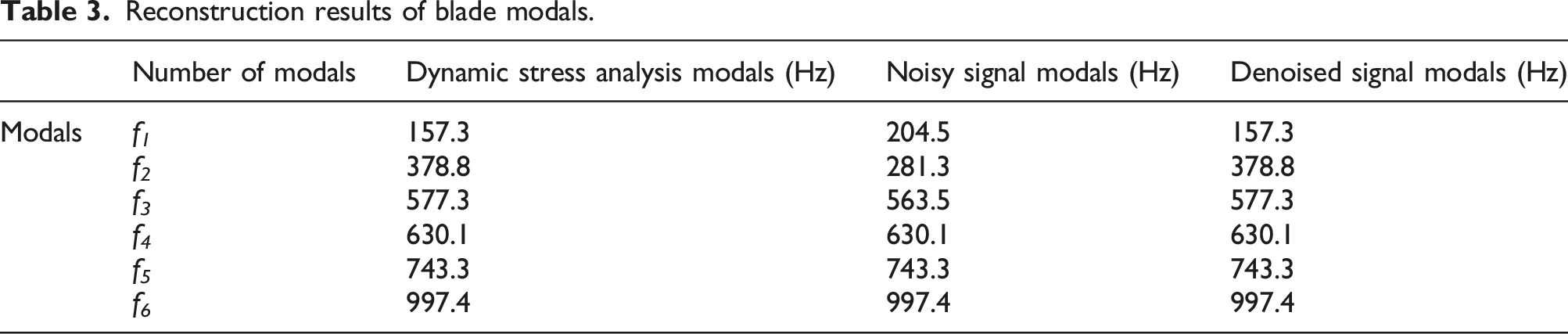
The data preprocessed by GA-K-SVD is shown in Figure 14(b); the block size is 5×5, the dictionary size is 25×50, and σ = 100. Figure 15 shows the results of the OMP reconstruction of the noise-containing signal and the noise-reduced signal, where the modals under 100 Hz are probably caused by vibration of rotor, casing, and probes. It can be seen that the aliased modals of the BTT signal are preserved intact after denoising process. As shown in Figure 15(a), in the case of no denoising, the modal identifications at 157.3 Hz, 378.8 Hz, and 577 Hz have frequency deviation errors. As shown in Figure 15(b), the spectral reconstruction of the preprocessed data using GA-K-SVD can retain all aliased modals, while the preprocessing algorithm greatly reduces the number of iterations for the OMP algorithm to find the most relevant column. Meanwhile, the processing time is shortened from 17.81 s to 7.00 s, while GA-K-SVD only takes 2.07 s to complete the denoising. This verifies the preprocessing method proposed in this paper. (a) Reconstructed experiment blade vibration spectrum from noisy BTT signal; (b) reconstructed experiment blade vibration spectrum from denoised BTT signal.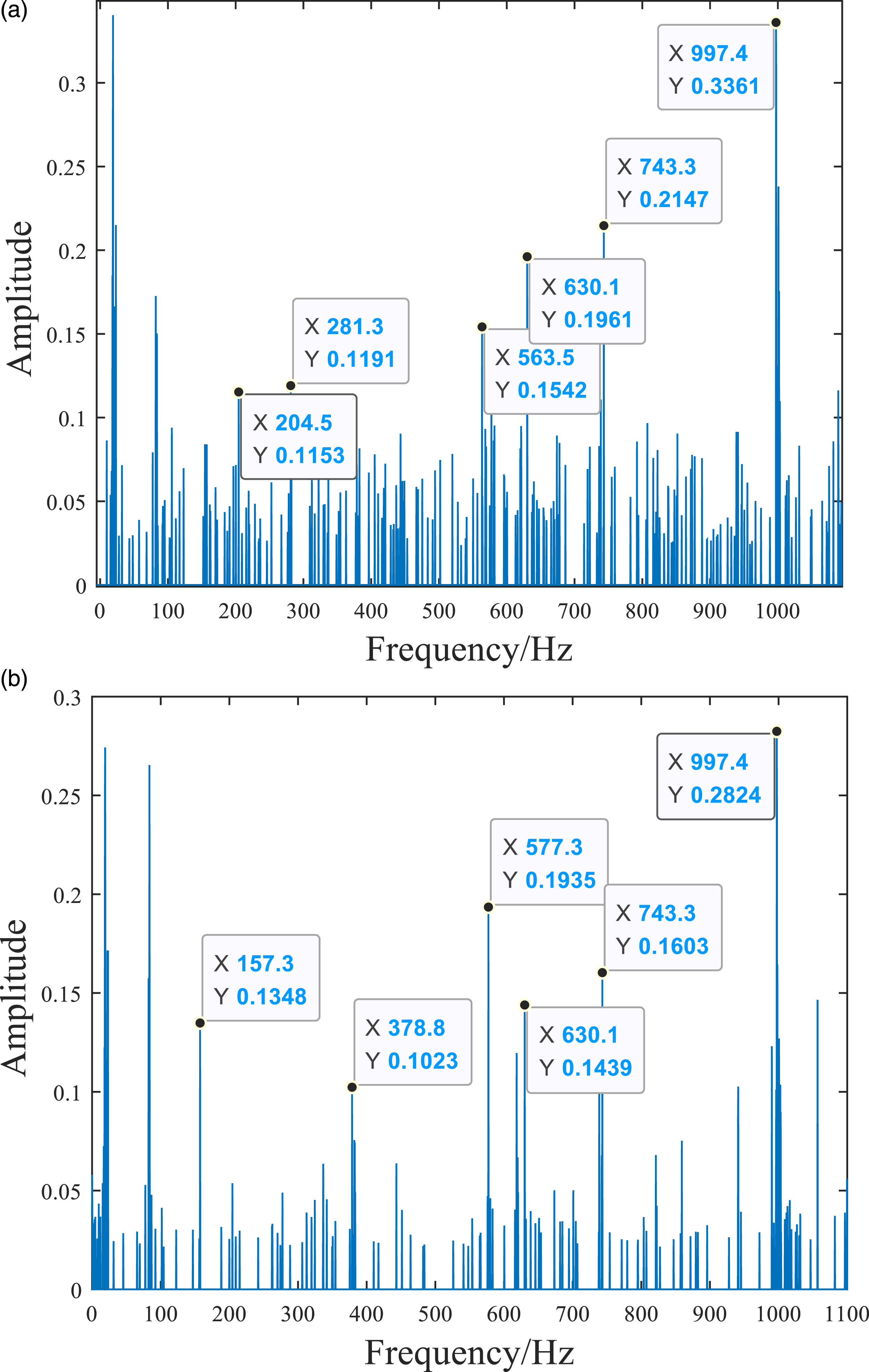
Conclusion
This work proposes a novel method for denoising BTT signals with high noise level based on sparse representation. The method reduces Gaussian noise by creating sparse representations that can filter out noise components. The proposed algorithm GA-K-SVD can reduce noise in under-sampled BTT signals while preserving blade vibration modals. Simulations and experiments were performed to validate GA-K-SVD. The key procedures and results are summarized as follows: (1) A novel noise reduction method based on sparse representation for BTT signals is proposed. Leveraging the sparsity of the BTT signal in the frequency spectrum, the main modals of the vibration are found via a sparse representation model. By removing small modals in the sparse vector that are close to zero and performing a sparse inverse transformation on the optimized sparse vector, we can obtain a denoised BTT signal. (2) The Global Average method is proposed to improve denoising efficiency. An oversized sparse dictionary created by the large length of the BTT signal will decrease the denoising speed, while a small-sized sparse dictionary leads to the loss of the modals. To solve this problem, the method represents the large multi-channel BTT signal with a small sparse dictionary by splitting BTT signal into blocks with a sliding window. Finally, Global Average method splices each noise-reduced signal blocks together and eliminates overlaps to complete signal reconstruction and noise reduction. As an important part of GA-K-SVD, it is of great significance to improve the efficiency of the proposed algorithm. (3) An over-complete sparse dictionary is built based on the improved K-SVD algorithm to increase the denoising effect. When applying a fixed Fourier-based dictionary, the sparsity of sparse vectors is not ideal and the aliased modals can be lost for aero-engine blades with diverse vibration modalities. Instead, the improved K-SVD algorithm can obtain an over-complete sparse dictionary with a better structural feature matching degree of the original signal. Main modals can be easily distinguished from small modals when sparse vectors of the signal blocks are found. Combining the Global Average method and the improved K-SVD algorithm, the efficient noise reduction of BTT signal can be realized. (4) Simulation and experiment show that the GA-K-SVD algorithm has a great denoising effect on the high noise level of the BTT signal; it can preserve the aliased modals as well. Besides, by applying the GA-K-SVD algorithm, the efficiency and the reconstruction accuracy of a reconstruction algorithm, such as OMP, can be greatly improved for high-level noise scenarios.
Supplemental Material
Supplemental Material - A novel method for noise reduction of blade tip timing signals based on sparse representation and dictionary learning
Supplemental Material for A novel method for noise reduction of blade tip timing signals based on sparse representation and dictionary learning by Hua Zheng, Guanyu Fang, Shiqiang Duan, and Hang Li in Journal of Low Frequency Noise, Vibration, and Active Control.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.