
Abstract
In this paper, we aim to study the dynamical behaviour of the motion for a simple pendulum with a mass decreasing exponentially in time. To examine this interesting system, we firstly obtain the classical Lagrangian and the Euler-Lagrange equation of the motion accordingly. Later, the generalized Lagrangian is constructed via non-integer order derivative operators. The corresponding non-integer Euler-Lagrange equation is derived, and the calculated approximate results are simulated with respect to different non-integer orders. Simulation results show that the motion of the pendulum with time-dependent mass exhibits interesting dynamical behaviours, such as oscillatory and non-oscillatory motions, and the nature of the motion depends on the order of non-integer derivative; they also demonstrate that utilizing the fractional Lagrangian approach yields a model that is both valid and flexible, displaying various properties of the physical system under investigation. This approach provides a significant advantage in understanding complex phenomena, which cannot be achieved through classical Lagrangian methods. Indeed, the system characteristics, such as overshoot, settling time, and peak time, vary in the fractional case by changing the value of α. Also, the classical formulation is recovered by the corresponding fractional model when α tends to 1, while their output specifications are completely different. These successful achievements demonstrate diverse properties of physical systems, enhancing the adaptability and effectiveness of the proposed scheme for modelling complex dynamics.
Introduction
The simple pendulum is a basic example to analyze the periodic motion concepts. The Lagrange equations are commonly used to derive the nonlinear equations of motions of a simple pendulum and several other complex systems. They are often used to model systems, for example robot manipulators. In many engineering areas more advanced pendulum configurations take place such as rotary or inverted pendulums where you have several, multi-variable equations of motion.1,2 Then, there is always a need to develop methods in modelling and controlling such complex systems. In article, 1 flexible online adaptation strategies for the performance-index weights are presented to constitute a variable structure Linear-Quadratic-Integral controller for an under-actuated rotary pendulum system.
Simple pendulum-bob is one of the most important examples in classical mechanics. The simple pendulum can be studied as a free system (for example, no air resistance) or with a damping factor acting on it in which the differential equation of motion appeared is a nonlinear one. Many real-world nonlinear phenomena can be expressed by differential equations similar to that of a pendulum. These phenomena arise in several fields of technology and sciences, e.g., oscillations in small molecules, analysis of acoustic vibrations, Josephson junctions, electronic filters, oscillations of structures during earthquakes, and many others; see, for example, 2 and the references therein.
In literature many efforts have been paid on studying many kinds of pendulums with constant masses either analytically or numerically. For example one can refer to.3–5 The main idea that attracts our attention here is replacing the constant mass with a mass decreasing with time. It has been noticed that little attention have been paid on such idea. In 6 Rafał Kwiatkowski studied the dynamics of double pendulum system with variable mass. One can refer to the important results achieved in that work.
The differential equation for a free simple pendulum-bob is a second-order one which can be solved easily, and its solution contains sine and/or cosine depending on the initial conditions. On the other hand, many difficulties appear in solving nonlinear differential equations for the damped simple pendulum (depending on the form of damping effect). Due to this, numerous approximation schemes have to be used to obtain their solution. 7
Fractional differentiation is a generalization of classical calculus to any order (usually non-integer).8–10 Recently, fractional calculus has gained critical attention as a topic applied to many areas of engineering and sciences, such as biology, physics, fluid mechanics and so on.11–25 The benefit of using fractional operators rather than classical integer-order ones comes from the fact that the next state of a system depends not only on its current state but also on all of its historical states. This is why fractional calculus has become more common. The problem of obtaining the fractional-order Euler-Lagrange equations of motion have attracted many authors in both their theoretical and applied researches.16–25 For instance, the fractional Lagrangian was achieved in, 17 and the constrained fractional Hamiltonian were considered and discussed in. 14 The classical fields with fractional derivatives were examined in. 19 In, 20 the Hamiltonian formalism and the fractional Euler-Lagrange equations were employed to study the non-local behavior of a triple pendulum system. In, 23 Baleanu et al. explored the Hamiltonian of a two-electric pendulum as well as the fractional Lagrangian of a Pais-Uhlenbeck oscillator.
In this paper, we consider a simple pendulum with an exponentially decreasing mass in time. According to the best of our knowledge, this system has not been studied before either classically or fractionally. As the main contribution of this study, we conduct the generalized Lagrangian for the considered system via non-integer order derivative operators. The corresponding non-integer Euler-Lagrange equation is then derived, having the ability of displaying different characteristics of the physical system under consideration for various fractional orders. The rest of this manuscript is prepared as follows. In Section 2, some basic notions for the considered fractional-order operators are mentioned. In Section 3, the motion of the pendulum with a mass decreasing exponentially in time is described in both classical and fractional frameworks. A numerical method together with its associated simulations results is presented in Sections 4 and 5, respectively, and some concluding remarks are finally given in the last section.
Preliminaries
Below, we overview the definitions of the fractional derivatives that are used throughout this work in constructing the fractional Lagrangian (FL) and numerical simulations.
The right and the left Riemann-Liouville fractional integrals, respectively, have the following forms.9,10


While the right and the left Riemann-Liouville fractional derivatives are correspondingly described as


Here,


Description of a pendulum with a mass decreasing exponentially
Below, we give a full description for the suggested pendulum which has a mass decreasing exponentially with time (Figure 1). More specifically, we assume that a spherical shell filled with, for example, sand is connected at the end of a rob which has the length b. Sand is also leaving through a hole such that the mass decreases exponentially with time as Suggested pendulum.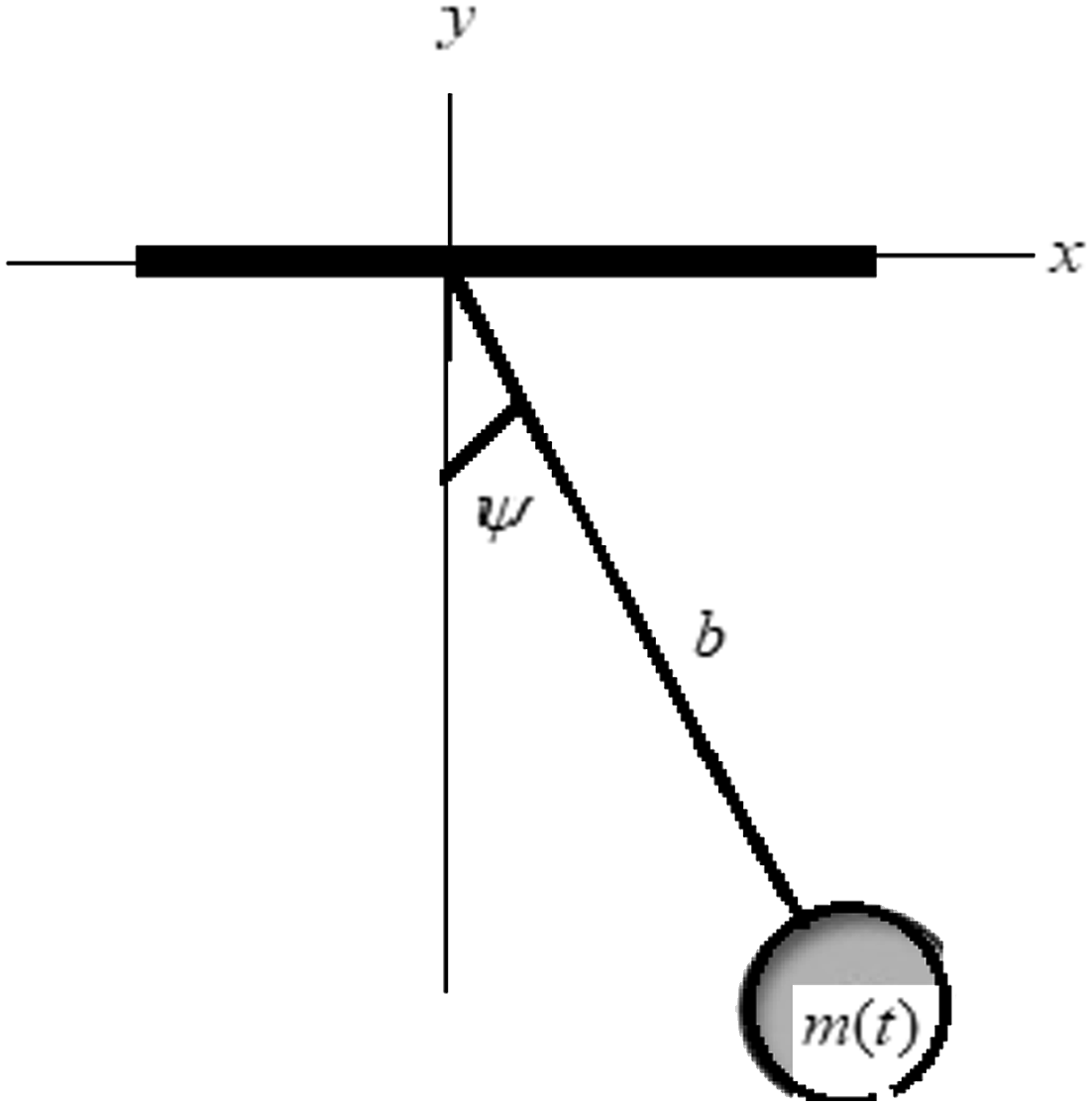

In Figure 2, we plot Eq. (1) for the following parameters The variation of 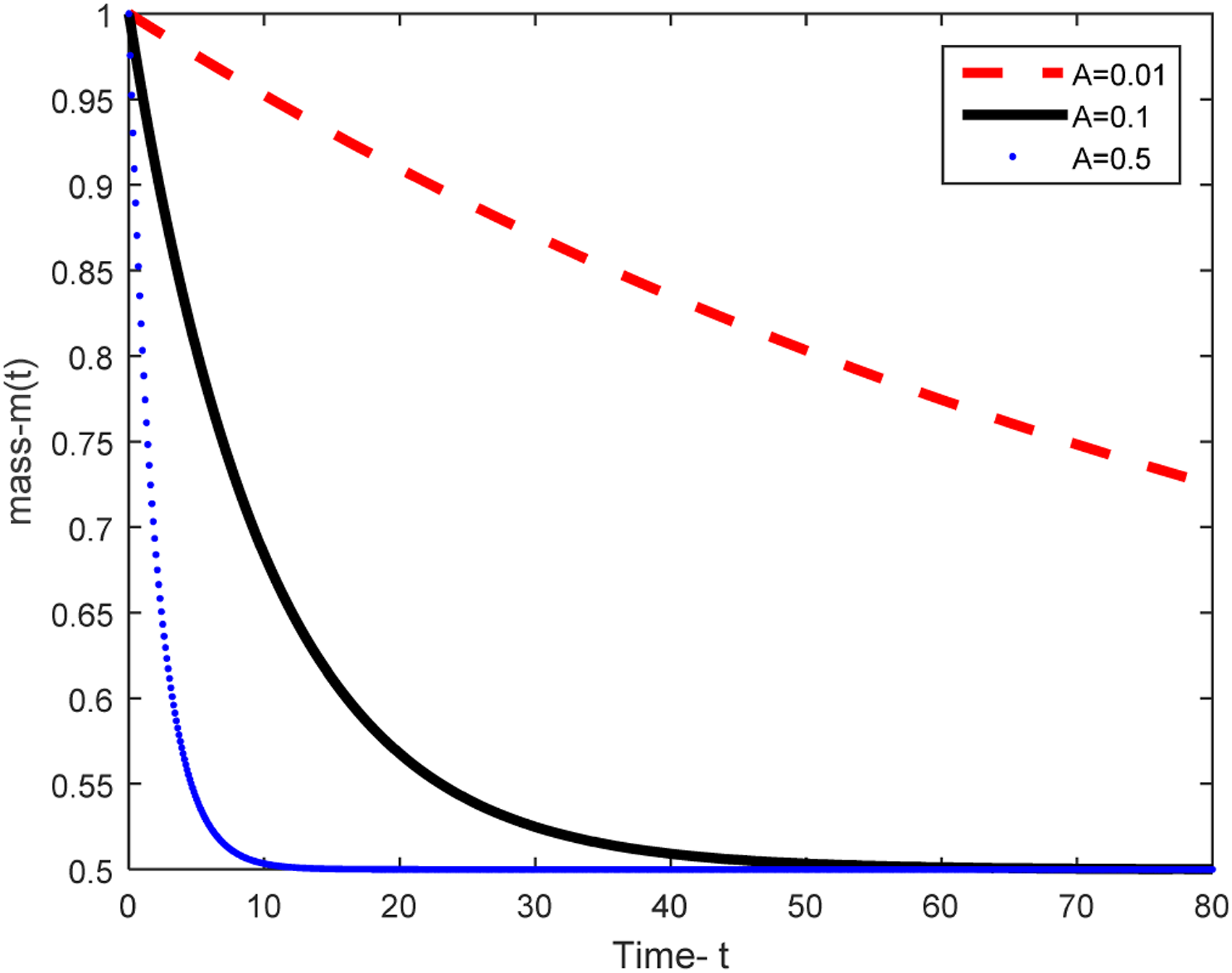
Firstly, we aim to derive the classical Lagrangian (CL) of the system which is defined as
26



Using polar forms with


According to Eqs. (1), (5), and (6), the CL can be written as


If we consider



The classical Hamiltonian (CH) is defined by

Finally, the CHE reads


Combining (19) and (20), one gets

For small oscillations, it is reduced to

We notice that Eqs. (21)-(22) are identical to the CELE given in Eqs. (15)-(16).
Fractional description of the system
In this section, we start by fractionalizing Eq. (13). To do so, the fractional Lagrangian (FL) reads

Upon substituting the FL given in (23) into the relation


To get the fractional Hamilton equation (FHE) of the motion, we introduce the two generalized momenta


Then the fractional Hamiltonian (FH) reads


We can now derive the FHE as

Again, for small oscillations, i.e., when

Equation (30) is accurately the same as Eq. (25). It is worth to mention that Eqs. (25) and (30) also go to Eq. (15) as
Numerical scheme
In the following, we introduce a numerical technique to solve the FHE (30). In this definition of the state, it is supposed that

Using the RL fractional-order integral operators (1)-(2), the following equations are then achieved

Now, we suppose that there exist equidistant nodes with step size



The equations 33 and 34 can be presented as the following compact form



Simulation results and discussion
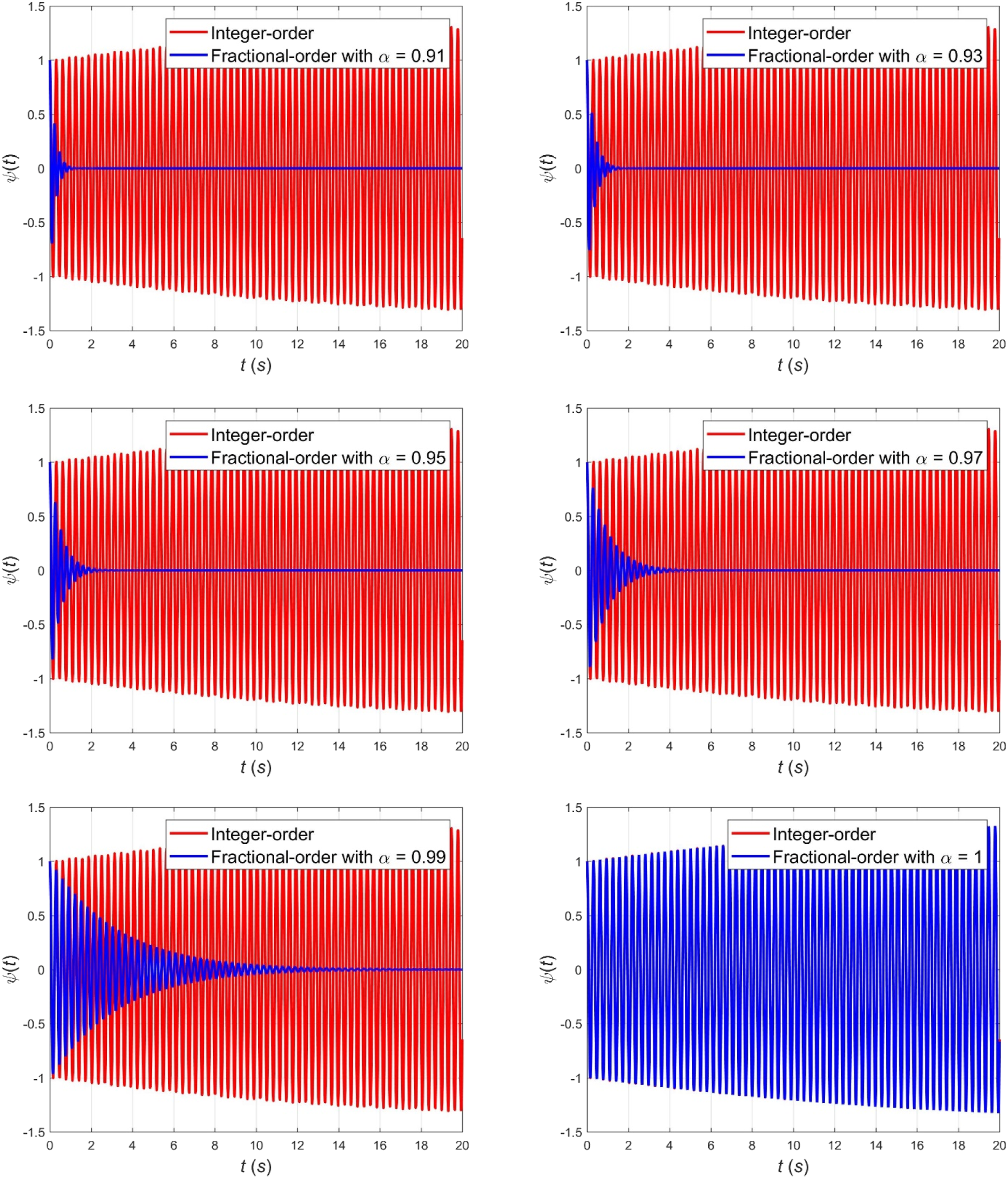
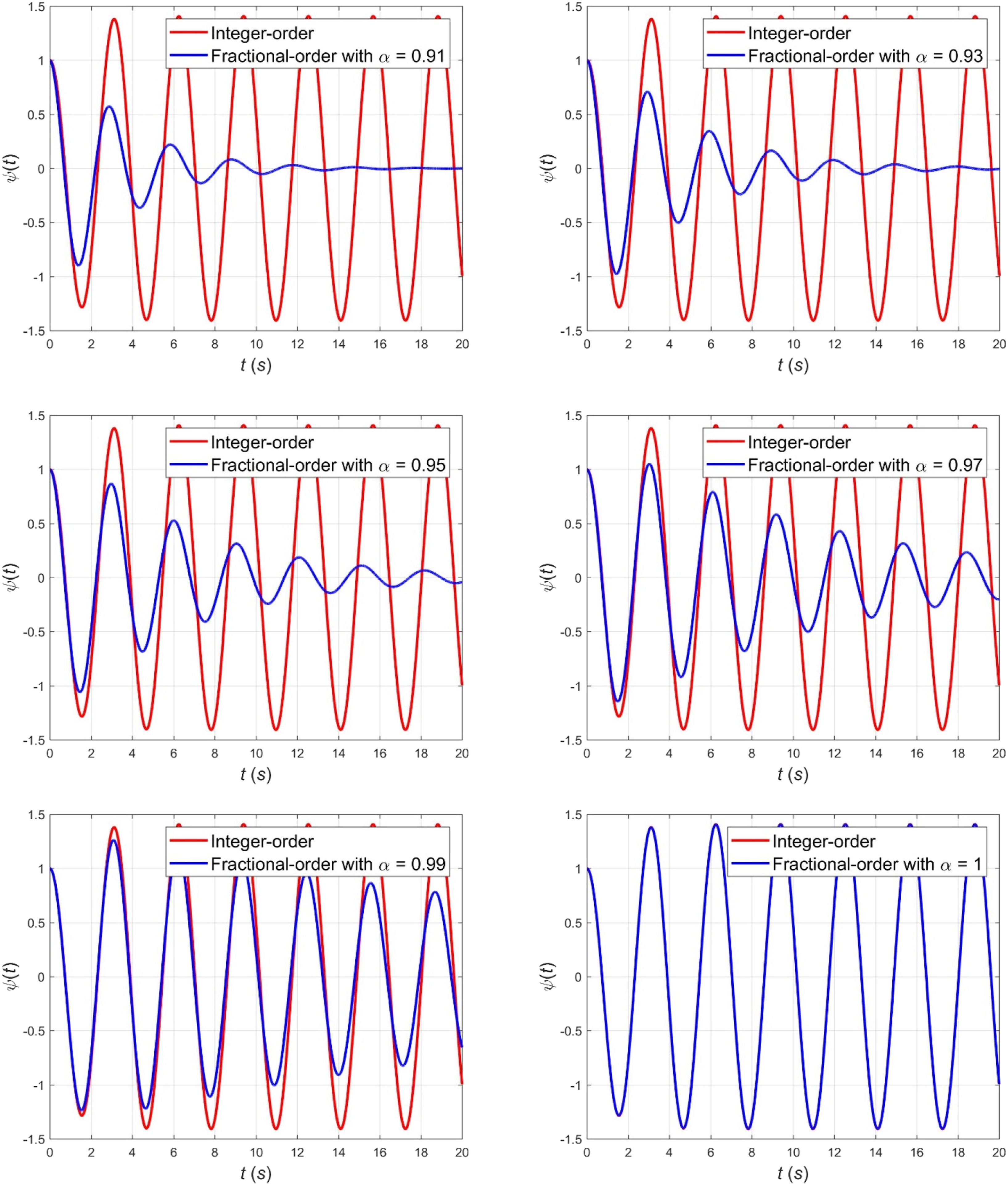
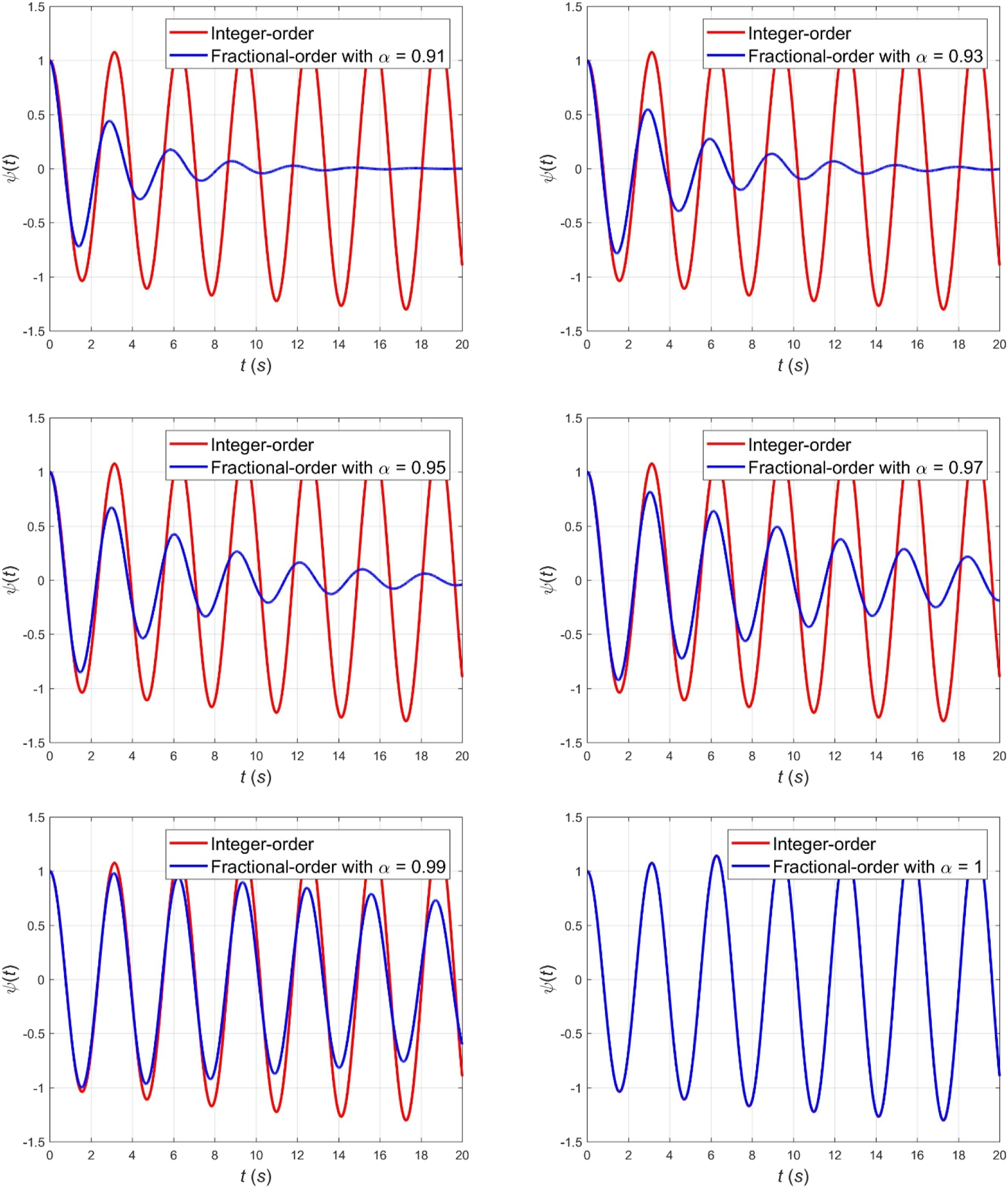
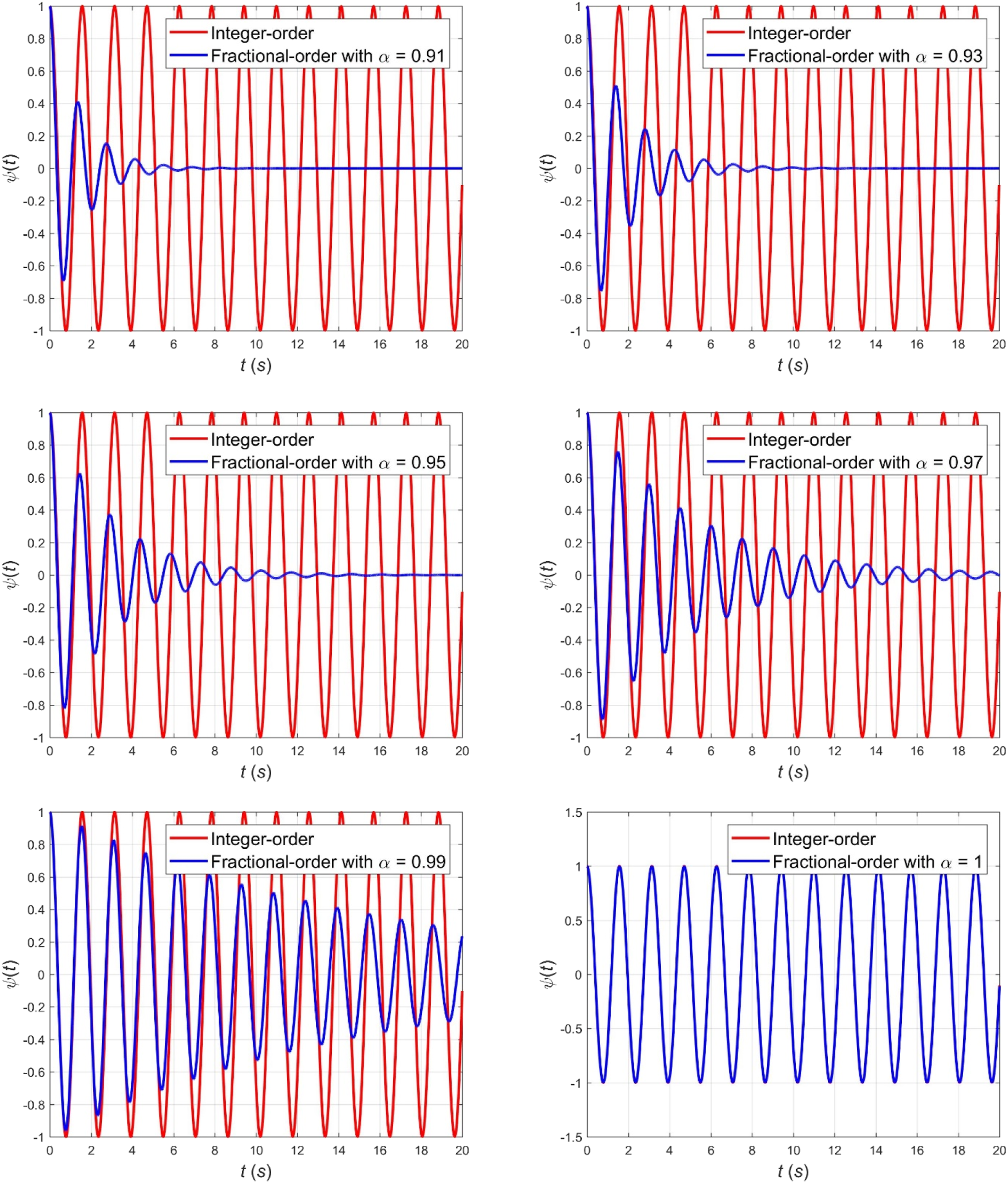
In this part, the numerical scheme in Section 4 is employed to simulate the classical and fractional description of the pendulum studied in this paper. To this end, we take into account five various cases for coefficients and parameters: ω0 = 20 (rad/s) and A = 1; ω0 = 20 (rad/s) and A = 0.1; ω0 = 2 (rad/s) and A = 1; ω0 = 2 (rad/s) and A = 0.1; ω0 = 4 (rad/s) and A = 0. Also, we set the initial conditions as ψ(0) = 1 (rad) and dψ/dt (0) = 0 (rad/s). Simulation results for these five special cases are depicted in Figures 3–7. From these figures, it is apparent that the behavior of the fractional description regarding the considered pendulum varies by changing the parameter α. More to the point, the system characteristics like overshoot and settling time highly depend on the value of α; more precisely, these performance specifications increase as α increases. Also, a slight increase occurs in the peak time by increasing the value of α. However, no significant changes appear in the damped frequency in this regard. Additionally, as expected, the classical model of the pendulum is recovered by the corresponding fractional-order one when α tends to 1, while their output properties are totally different; for instance, the integer-order model behaves like an undamped system in some cases while the fractional-order one presents an underdamped response. This achievement indicates that a flexible and valid model is provided by the fractional Lagrangian approach, and the aforesaid model has the ability of displaying different characteristics of the physical system under consideration. This is a significant advantage of the fractional Lagrangian approach over its corresponding classical counterpart, a superiority which is helpful to better comprehend complex dynamics. Dynamical behaviours of ψ(t) by classical and fractional Euler-Lagrange equations (ω0 = 20 and A = 1). Dynamical behaviours of ψ(t) by classical and fractional Euler-Lagrange equations (ω0 = 20 and A = 0.1). Dynamical behaviours of ψ(t) by classical and fractional Euler-Lagrange equations (ω0 = 2 and A = 1). Dynamical behaviours of ψ(t) by classical and fractional Euler-Lagrange equations (ω0 = 2 and A = 0.1). Dynamical behaviours of ψ(t) by classical and fractional Euler-Lagrange equations (ω0 = 4 and A = 0).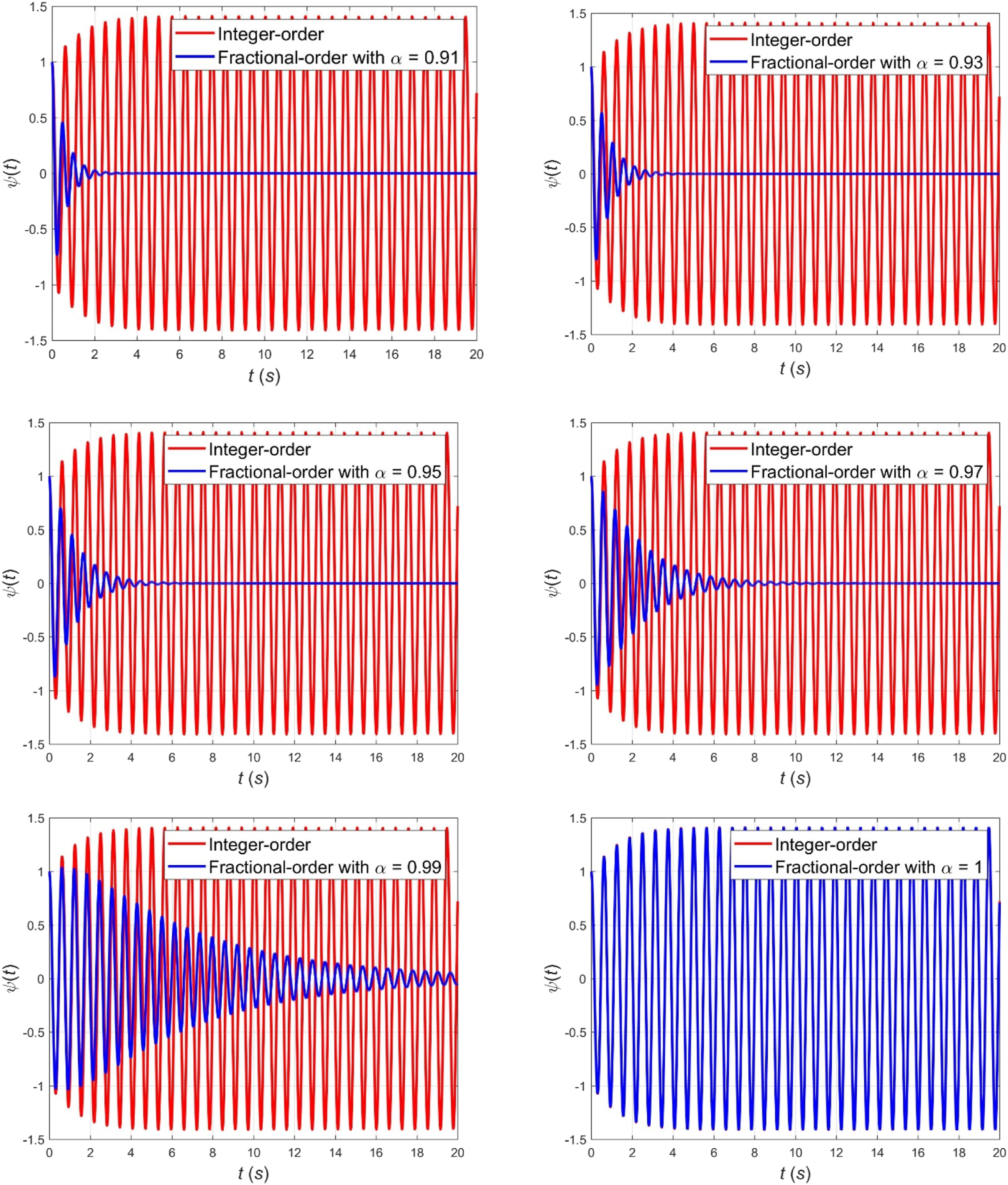
Conclusions
A simple pendulum-bob system with time varying mass was considered in this paper. The classical and the fractional Euler-Lagrange equations of the system were obtained. The approximate solutions of the system are then simulated by several plots in comparison with the classical and fractional frameworks. Simulation results indicated that the behavior of the fractional description regarding the considered pendulum varies by changing the parameter α, which gives the possibility to capture different dynamics of the system. Also, the classical model of the pendulum was recovered when α goes to 1, meaning that the FELE solution approaches to the CELE response. This accomplishment demonstrates that the fractional Lagrangian approach provides a flexible and reliable model capable of exhibiting different aspects of the physical system under study, a fact which is a significant advantage of the fractional Lagrangian method over the classical one, making it easier to understand complicated dynamics.
For future work, one can consider spring pendulum with mass decreasing with time and also a double pendulum with masses changing with time can be considered classically or fractionally.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by Palestine Technical University Kadoorie; Scientific research fund 2023. This work is partially supported by The Scientific and Technological Council of Türkiye (TUBITAK) Reasearch.
Appendix
Table of nomenclature.
Nomenclature
Meaning
(alpha)
Fractional order
m(t)
Time depending mass
A
parameter (no unit)
b
Length of pendulum
g
Acceleration of gravity
Ug
Potential energy
T
Kinetic energy
pendulum angular position
Angular frequency
P
Linear momentum