
Abstract
Nonlinear oscillations are ubiquitous in various fields of engineering and applied sciences. In engineering, vibration isolators such as absorbers and dampers have been used to reduce damages of most undesired vibrations to a structure or a system. One important class of dampers is the pendulum tuned mass damper. Since it is difficult to solve nonlinear oscillation equations analytically, it is highly demanded to design numerical methods that preserve as much as possible intrinsic properties of the original system. To this end, we propose a locally exact modified midpoint rule with a parameter ω by combining ideas of locally exact discretization and symplecticness. We prove that it is convergent of order two for any ω as its classical partner; however, its local error accuracy can be remarkably improved with a proper choice of ω. A numerical example is provided to highlight the accuracy and effectiveness of the new method. Finally, effective implementation of the new method is also discussed based on approximate analytical solution.
Introduction
Nonlinear oscillations are ubiquitous in various fields of engineering and applied sciences,
1
for example swinging pendulum, the beating of the human heart, business cycles in economics, etc. Study and simulation of nonlinear oscillation systems are important. In engineering, to reduce damages of most undesired vibrations to a structure or a system, vibration isolators such as absorbers and dampers have been used widely, for example the designer of the Taipei 101 building designed a 660-tonne steel pendulum that serves as a tuned mass damper (TMD) to withstand the typhoon winds and earthquake tremors that are common in the area east of Taiwan. In order to understand the behavior of a pendulum TMD in detail in practice, it is often needed to solve efficiently a mathematical modelling of nonlinear pendulum oscillation. Due to Newton’s second law, most motion of undamped oscillations in scientific and engineering applications are modeled by the second differential equation

It is well-known that it is difficult to obtain explicit solution for nonlinear equation (1) analytically, therefore, to find accurate enough numerical solution is desirable at proper cost with small step size. However, the dynamics of conventional numerical methods such as Runge-Kutta method, multi-step method, predictor-corrector method and others may not be as rich as that of its continuous counterparts.2,3 This type of inaccuracy cannot be improved by reducing the step size of numerical methods. Therefore, numerical methods that preserve as much as possible intrinsic properties of the original dynamical system for all step sizes or relatively big ones are highly demanded. Exponential method which exactly integrates the linearized equations for semilinear or nonlinear equations has received much attention over last few decades. 4 In this direction, some instances of this type of integrators are methods known as exponential fitting,5–7 exponential integrators,8,9 local linearization10,11 and locally exact modification of conventional numerical methods.12,13
By introducing
Recently, Cieśliński and Ratkiewicz 13 successfully present locally exact discrete gradient for equation (1), where locally exact modification means that the linearization of modified discrete gradient scheme around some point gives exact discretization of the linearization of equation (1) around the same point. Analysis and numerical experiments show that locally exact discrete gradient method has attractive advantage while retaining energy conserved. On the other hand, it is well-known that there exists no numerical method that can be simultaneously symplectic and energy-preserving, otherwise it is a time-transformation of the exact flow of Hamiltonian systems.17,18 Therefore, construction of symplectic algorithm is of great interest in numerical integration of Hamiltonian systems. In addition, by a backward error analysis, symplectic algorithm could exhibit bounded energy error for exponentially long times (see, e.g. Hairer et al. 19 ).
Motivated by the importance of symplecticness for Hamiltonian systems and the advantage of locally exact discretization suggested by Cieśliński and Ratkiewicz, 13 we hope to discuss to what extent and how locally exact discretization compete with symplectic scheme for the considered equation (1), and how locally exact modified symplectic scheme provides improved numerical simulation for nonlinear oscillation systems. To this end, our work here is to present locally exact symplectic algorithm. We take the implicit midpoint rule as an example and construct its locally exact modification while keeping symplectic condition simultaneously, aiming to provide better numerical simulation for nonlinear oscillation systems. Before we close this introduction, it is worth mentioning that apart from numerical methods for solving equation (1), recent semi-analytical methods that focus on frequency-amplitude estimation and active vibration control20–24 are interesting, which give approximate analytical solution of equation (1).
This paper is organized as follows. In section Preliminary, basic knowledge about numerical integration of Hamiltonian systems are briefly reviewed. In section Locally exact modified midpoint rule, the process to construct locally exact modified midpoint rule is proposed and convergence of this method is analyzed. In section Numerical Example, numerical experiment is presented to show that the proposed method possesses expected accuracy and better numerical simulation for simple pendulum equation. Finally, this paper ends with some concluding remarks and discussions.
Preliminary
For completeness, we firstly present some basic knowledge about Hamiltonian systems and their relevant numerical discretization methods, which could be found in several classical monographs, for example see literature.19,25–27
A d-dimensional autonomous Hamiltonian system consists of 2d first-order differential equations


The flow

A desirable property of a numerical method defined by

The well-known approaches to construct symplectic method include generating function theory, 28 variational method,29,30 the class of Runge-Kutta (RK) method (including partitioned Runge-Kutta method and Runge-Kutta-Nyström method), splitting and composition method. In this paper, we mainly focus on RK method.
An s-stage RK method for solving (2) with the initial condition
A characteristic for an RK method is symplectic if its coefficients satisfy

Classical midpoint rule is a one-stage RK method with Butcher tabular
It is easy to verify that the coefficients in (8) satisfy that of equation (7), therefore, the midpoint rule is a symplectic method.
In fact, if we adjust the coefficients in (8) by

In the next section we will determine the parameter a in (9) by forcing this method solves exactly the linearized equation of (1). We call it locally exact modified midpoint rule.
Locally exact modified midpoint rule
Now we are in the position to present our locally exact modified midpoint rule in the following steps.

By introducing

The exact solutions of equation (11) with initial conditions

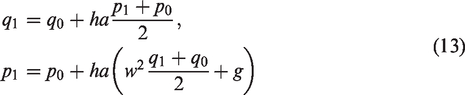
Therefore, we get





Secondly, we expand numerical solutions q1, p1 at (q0, p0) in the following


Using the approximation


Subtracting equations (21) and (22) from equations (17) and (18), we arrive at
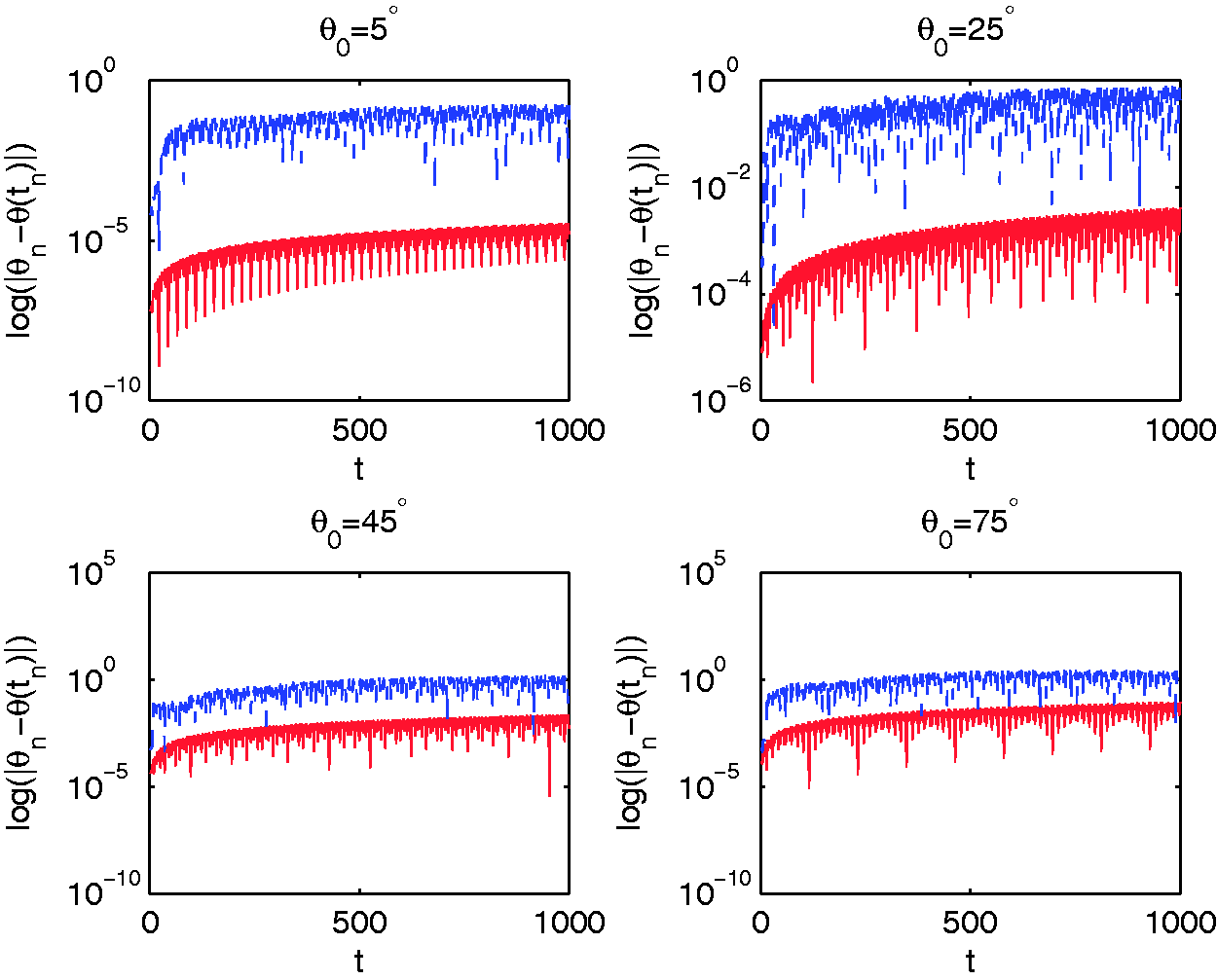
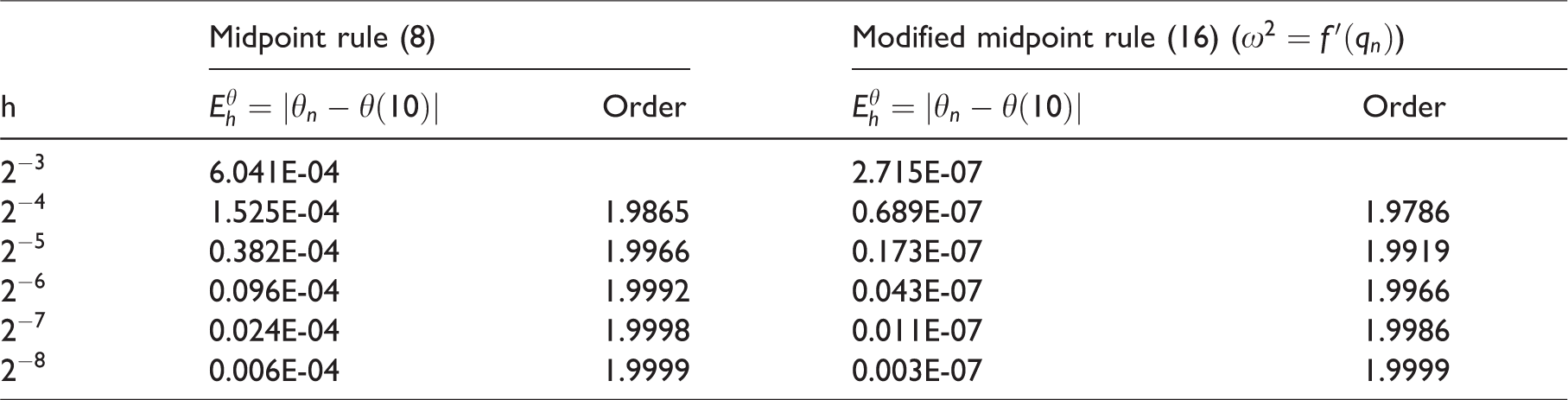
Therefore, it suggests that the accuracy of modified midpoint rule is the second order for any In this section, we compare our modified midpoint rule with classical midpoint rule to show that the new modified midpoint rule possesses expected accuracy of the second order (see Table 1), but produces smaller global errors than classical midpoint rule (see Figure 1). Global errors of θn by modified midpoint rule (16) with red line and classical midpoint rule by blue line for Global errors To this end, we take one of the most popular nonlinear oscillation systems—simple pendulum—as an example, which is written as
Global errors From the third and fifth columns of Table 1, it is clearly seen that both classical midpoint rule and the modified midpoint rule possess the expected second order of convergence. Furthermore, the second and fourth columns of Table 1 show that modified midpoint rule obviously produces smaller errors than classical midpoint rule. Next, Figure 1 shows global errors for Numerical example



Conclusions and discussions
Exact discretization of linear differential equations is natural and have the very attractive property of leading to exact approximate solution. Symplectic algorithms are widely recognized for the numerical integration of Hamiltonian systems. In this paper, by combining these two effective ideas, we derive a locally exact modified midpoint rule (16) for the conservative nonlinear oscillation systems (1). We show that the modified midpoint rule (16) with any ω always has the second-order convergence. Particularly, if
In order to implement the modified midpoint rule, one needs to determine a functional parameter 
Last but not least, it is noted that there are some interesting issues related to this work which will be further considered.
In this paper, we consider efficient numerical computation of undamped nonlinear oscillation systems. It would be interesting to consider the damped case in the same spirit of this paper. The modified midpoint rule is an implicit numerical method as the classical one. Since the problem we consider are separable Hamiltonian systems, it will be interesting to consider modification of explicit symplectic methods, such as Stömer-Verlet method.
Footnotes
Acknowledgements
The author thanks the anonymous referees and the Editor for their valuable comments and suggestions. Part of the work was done when the author was visiting the State Key Laboratory of Scientific and Engineering Computing, the Academy of Mathematics and Systems Science of the Chinese Academy of Sciences. The author thanks this institute for its support and hospitality.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (No. 11761033).