
Abstract
This study aims to enhance active vibration control in a cantilever beam using macro fiber composite (MFC) actuators. To address the challenge of accurately modeling the complex hysteresis behavior of MFC actuators, an advanced hysteresis modeling technique is employed, integrating a non-symmetric Bouc–Wen model with an Auto-Regressive model with eXogenous inputs (ARX). The parameter estimation of this model is optimized using an adaptive mutation factor, and multiple mutation strategy differential evolution (AmFMMDE) algorithm. Additionally, a Variable Step Size Filtered-x Least Mean Square (VSS-FxLMS) algorithm with step size adaptation based on normalized error change is utilized for effective vibration control. This approach shows promising potential for practical engineering applications requiring precise and efficient active vibration control.
Keywords
Introduction
Vibration control plays a crucial role in various engineering applications, including aerospace, civil structures, and mechanical systems, as excessive vibrations can lead to structural damage, reduced performance, and increased energy consumption. Numerous methods exist for mitigating vibrations, including passive, active, and semi-active approaches.1–3 Passive vibration control techniques primarily aim to reduce vibrations through methods such as absorption or separation. However, these methods often yield suboptimal results.4–6 On the other hand, semi-active vibration control methods face certain limitations and necessitate sophisticated control algorithms.7–12 Active vibration control has become a prominent research area in recent years due to the rapid development of smart materials, sensing technology, and actuating technology. 13 It involves generating a counteracting force that opposes the direction of vibration in the main structure. This force is an integral component of the vibration suppression system, which operates using various algorithms.14–16 The algorithms enable precise manipulation and control of the structure’s vibrations. This method has gained significant attention due to their ability to actively mitigate vibrations in real-time.17,18 Active vibration control involves the use of actuators that exert forces to counteract the undesired vibrations, thereby improving the overall system performance. 19
One type of actuator commonly used in active vibration control is the macro fiber composite (MFC) actuator,20–22 which can effectively manipulate the structural dynamics of a cantilever beam and attenuate vibrations. MFC is a piezoelectric material consisting of oriented piezoelectric ceramic fibers uniformly dispersed in the polymer matrix which contain epoxy resin.
23
The upper and lower layers of the MFC are protected polyimide film with adhesive electrodes layer, as shown in Figure 1. However, the hysteresis behavior exhibited by MFC actuators poses a significant challenge in accurately modeling their dynamic response.
24
Hysteresis is a nonlinear phenomenon commonly observed in piezoelectric materials, where the relationship between the input excitation and the resulting output response depends not only on the current input but also on its history. Thus, to achieve precise control of vibration using MFC actuators, it is essential to develop an accurate hysteresis model that can capture the nonlinearity and rate-dependent behavior. MFC’s view. (a) Sample. (b) Schematic.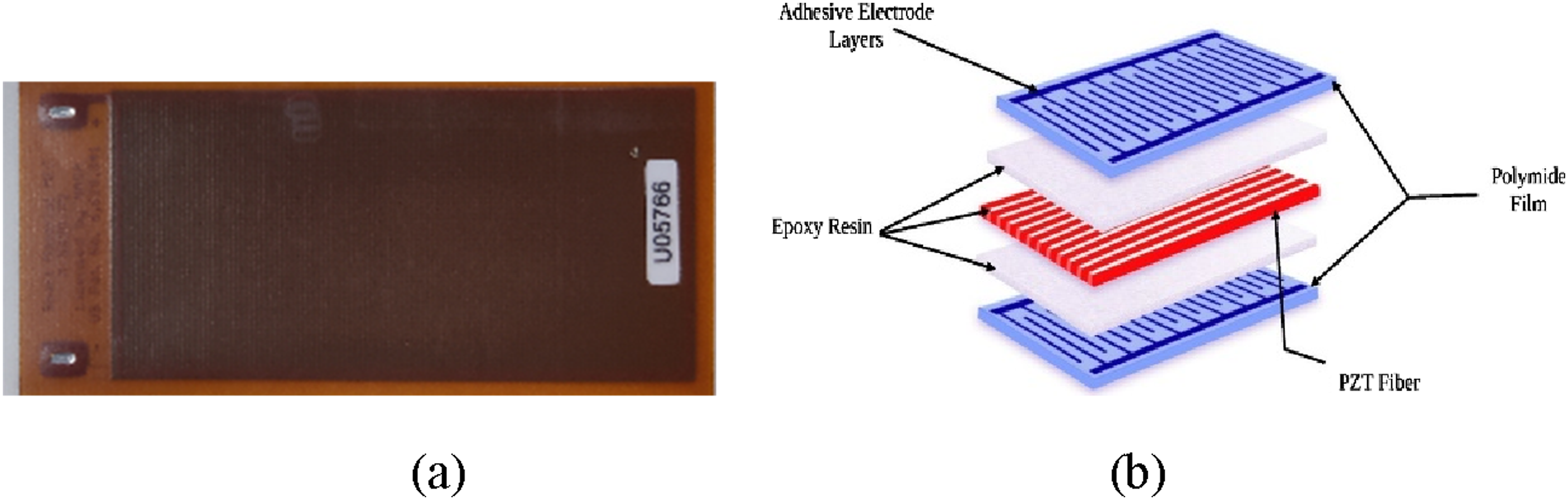
Various hysteresis models have been presented in recent years, 25 including the Bouc–Wen model,26,27 the Prandtl–Ishlinskii model,28–30 the Preisach model,31,32 and the Jiles–Atherton model.33,34 The Bouc–Wen model is a popular hysteresis model for describing the nonlinear behavior of many systems, including MFC actuators. 35 The Bouc–Wen model is a smooth hysteresis model that is able to describe the hysteretic behavior of the MFC’s using a set of differential equations. The model is a black-box model, meaning that it takes a set of experimental input-output data and adjusts its parameters so that the output of the model matches the experimental data.36,37 However, the Bouc–Wen model has some limitations, such as its inability to accurately describe the non-symmetric behavior of MFC actuators. To overcome the limitations of the Bouc–Wen model, the non-symmetric Bouc–Wen model was proposed. Zhiqiang Fu 38 proposed the asymmetric hysteresis characteristics of MFC actuator based on the sigmoid function. Jinqiang Gan 39 presented the non-symmetric Bouc–Wen model as the generalized Bouc–Wen Model by introducing relaxation functions in the classical Bouc–Wen model. By including an input bias and an asymmetric component into the classical Bouc–Wen model, Haichen Qin 40 suggested an asymmetric Bouc–Wen model.
In addition, since the hysteresis behavior in MFC actuator is not only nonlinear but also rate-dependent. To model this complex behavior accurately, a Hammerstein hysteresis model is proposed. It is a type of nonlinear system that consists of a static nonlinearity and a linear dynamical system connected in series. It is commonly used in system identification and has been applied to a wide variety of engineering problems. 41 Junhong Li 42 proposed a novel approach for modeling hysteresis nonlinearity using a combination of Hammerstein and Wiener models, referred to as the HWTD model. Kaiming Hu 43 proposed the rate dependent hysteresis behavior using Hammerstein model. A. Mohand Ousaid 44 expressed the Hammerstein model based hysteresis modeling of piezoelectric actuators and adaptive control based on the Extended Kalman Filter (EKF).
This study proposed a Hammerstein model combines a non-symmetric Bouc–Wen model, which captures the nonlinearity of the hysteresis, and an Auto-Regressive model with eXogenous inputs (ARX) model, which accounts for the rate-dependent behavior. This combination enables a more accurate representation of the hysteresis dynamics of the MFC actuators.
To make the model accurately describe the real hysteretic nonlinearity, it is necessary to identify the model parameters. To identify parameters of Bouc–Wen hysteresis models, many researchers improve the optimization algorithm to improve the algorithm performance. For instance, a modified firefly algorithm (MFA) proposed by M.A. Zaman, U. Sikder, 45 a novel genetic algorithm (nGA) presented by Birhan Abebaw Negash, 46 a new modified cuckoo search algorithm with dynamic discovery probability and step-size factor is proposed by Rosmazi Rosli, 47 the homotopy method in combination with gradient-based optimization algorithm expressed by R. Manikantan. 48 Gao Zhiyuan 49 proposed an ameliorated particle swarm optimization (APSO) algorithm. With the improvement of model, the number of parameters in the model increases, so the parameter identification becomes complicated. To estimate the model parameters effectively, an adaptive mutation factor and a multiple mutation strategy based differential evolution algorithm (AmFMMDE) are employed. The AmFMMDE algorithm optimizes the model parameters by iteratively adjusting the mutation factor and employing multiple mutation strategies to enhance the search capabilities.
An adaptive filter is a digital filter that can dynamically adjust its filter coefficients based on the input and output signals it receives. This adaptive nature allows the filter to continuously adapt and optimize its performance in real-time, making it well-suited for applications where the input signals or system characteristics may vary over time. The Filtered-x Least Mean Square (FxLMS) algorithm has gained popularity in adaptive filtering for vibration control due to several desirable features. 50 FxLMS algorithm is known for its adaptability, and robust, allowing it to track changes in the system dynamics and adjust the filter coefficients accordingly and ensures that the control system can effectively attenuate vibrations even in the presence of disturbances or uncertainties.16,51,52
The fixed step size used in FxLMS algorithm can lead to convergence issues, such as slow convergence or overshooting, especially in scenarios where the system dynamics change rapidly or exhibit non-stationary behavior. 53 To overcome this limitation, variable step size FxLMS (VSS-FxLMS) algorithm employs a variable step size technique. 54 By adapting the step size dynamically based on the observed error change, VSS-FxLMS achieves a balance between convergence speed and steady-state error. This adaptability in step size ensures a faster convergence rate while maintaining stability and accuracy during the adaptation process.
In this study, we introduce the VSS-FxLMS method with normalized error change step-size adaptation, which includes error signal history. The use of error history (the change in the error signal) rather than absolute error signal in step size adaptation enables resistance to fluctuating error magnitudes, adaptability to error dynamics, and reduced sensitivity to noise.
The main contribution of this paper is to propose a novel approach for active vibration control of a cantilever beam using MFC actuators, with Hammerstein model-based hysteresis modeling, parameter identification using AmFMMDE algorithm and VSS-FxLMS algorithm for control strategy design. Figure 2 shows the framework of our study which includes MFC’s hysteresis modeling, and active vibration control. Framework of modeling the MFC’s and vibration control.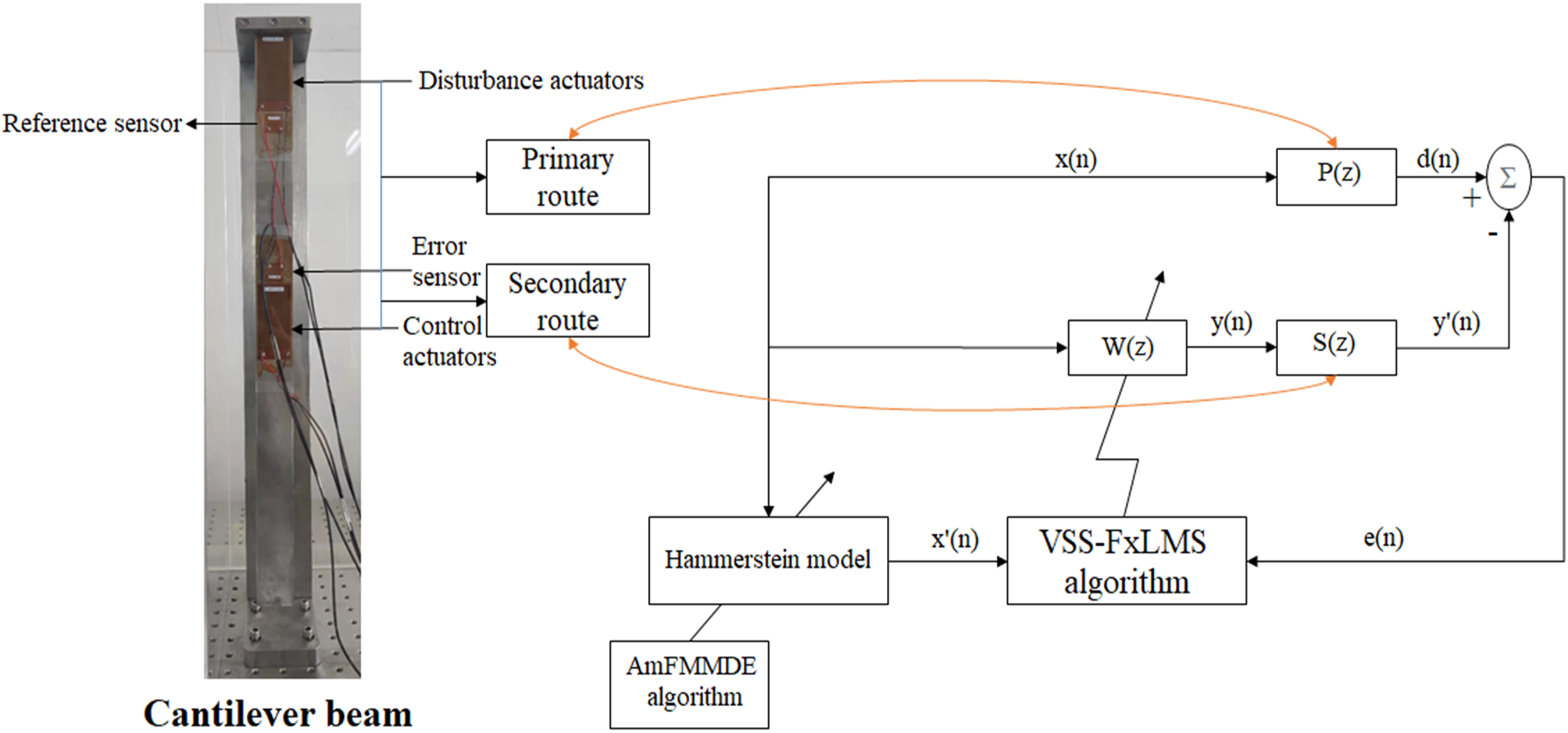
The proposed approach can effectively attenuate the vibrations of the cantilever beam, and outperforms conventional control strategies in terms of convergence rate and tracking accuracy. The proposed approach has the potential for practical applications in various engineering fields where active vibration control is needed.
Hysteresis modeling of MFC actuators
Bouc–Wen model in discrete form
The MFC actuators exhibit a hysteresis loop that can be modeled by the Bouc–Wen hysteresis model, which characterizes the relationship between the input voltage and the resulting displacement output. The standard Bouc–Wen model is as follows
55

The dynamic behavior of MFC actuators may be represented by a classical Bouc–Wen model, given by the following formulas
57
Bouc–Wen model symmetry.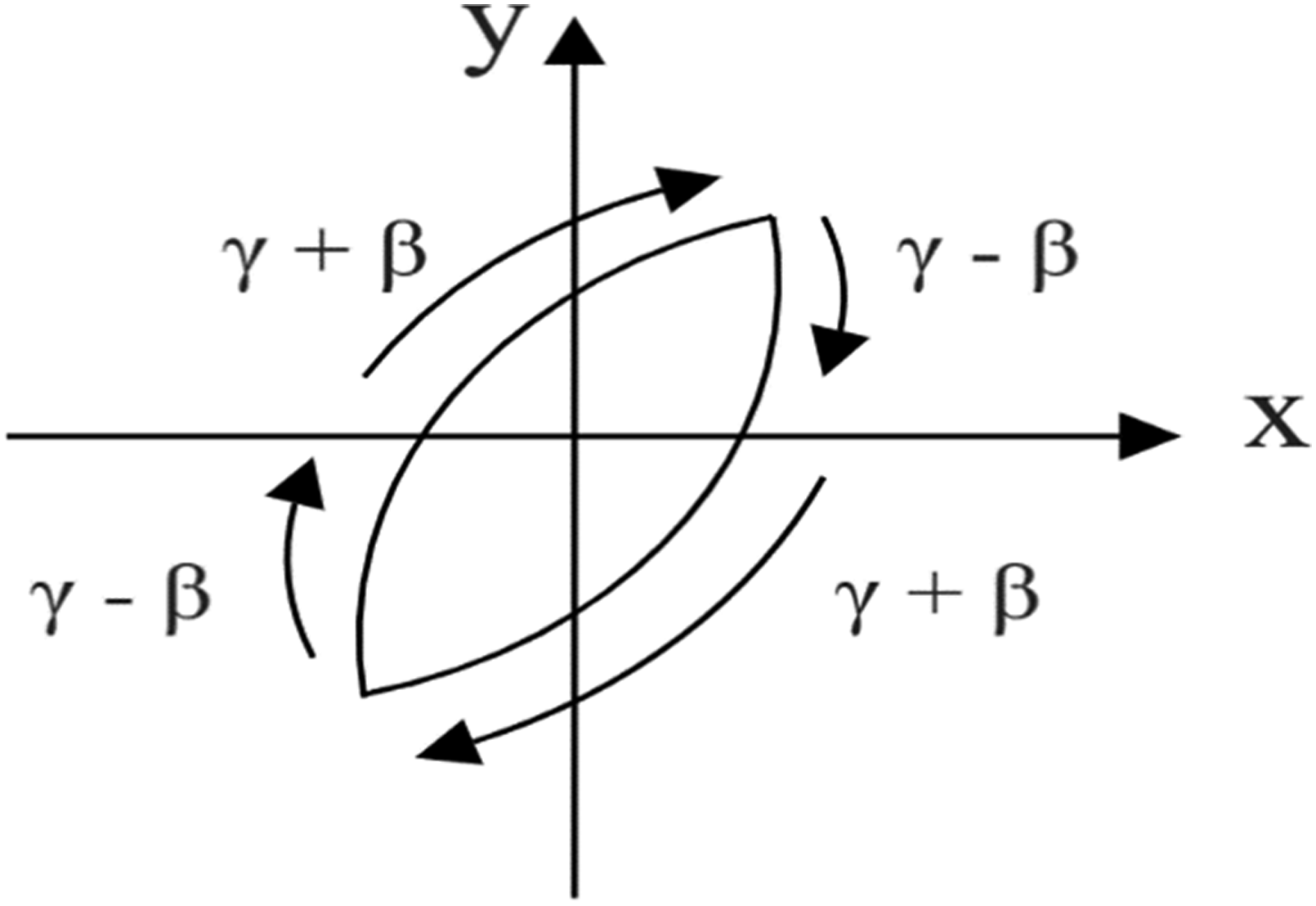


However, the hysteresis behavior of the MFC actuator, on the other hand is non-symmetric and rate-dependent. So, in order to enhance the model, many scholars in the literature focus on the modification of formula (3)’s with a more sophisticated mathematical form and a large number of factors. In this paper, we change formula (3) by substituting the non-hysteretic component



The modification offers several benefits. Firstly, the modification only affects the first section of the model, resulting in a relatively simple mathematical form. This simplification facilitates the implementation and analysis of the model. Secondly, by retaining the second section of the classical Bouc–Wen model, the modified model preserves its inherent advantages. The second section captures the complex dynamic behavior of the actuator, allowing for accurate representation of its response characteristics. Furthermore, the developed non-symmetric Bouc–Wen model is capable of characterizing non-symmetric hysteresis. This is particularly important for MFC actuators, as they often exhibit non-symmetric behavior due to various factors such as manufacturing imperfections or material anisotropy. The ability to accurately represent this non-symmetric behavior enhances the fidelity of the model and improves its applicability in practical control systems.
In order to utilize the non-symmetric Bouc–Wen model in digital control systems, it needs to be discretized. One common method for discretization is to employ the Laplace transform and bilinear transform. These mathematical techniques allow for the conversion of the continuous-time model to a discrete-time representation, which can be directly implemented in digital control systems. It is as follows



The given model depicts the non-symmetric behavior of MFC’s. Now, for rate-dependent behavior, we proposed the Hammerstein model, which combines a discrete-time non-symmetric Bouc–Wen model with a dynamic linear component represented by an ARX model. Figure 4 depicts the structure of the Hammerstein model. The input signal is first directed through a static nonlinearity block, which effectively captures MFC’s non-symmetric characteristics. Subsequently, the output from this block is fed into a linear dynamic system block to capture the rate-dependent behavior. In this study, we employ a second-order ARX model to represent the linear dynamics of the system. The mathematical expression for the second-order ARX model is as follows Proposed Hammerstein hysteresis model structure.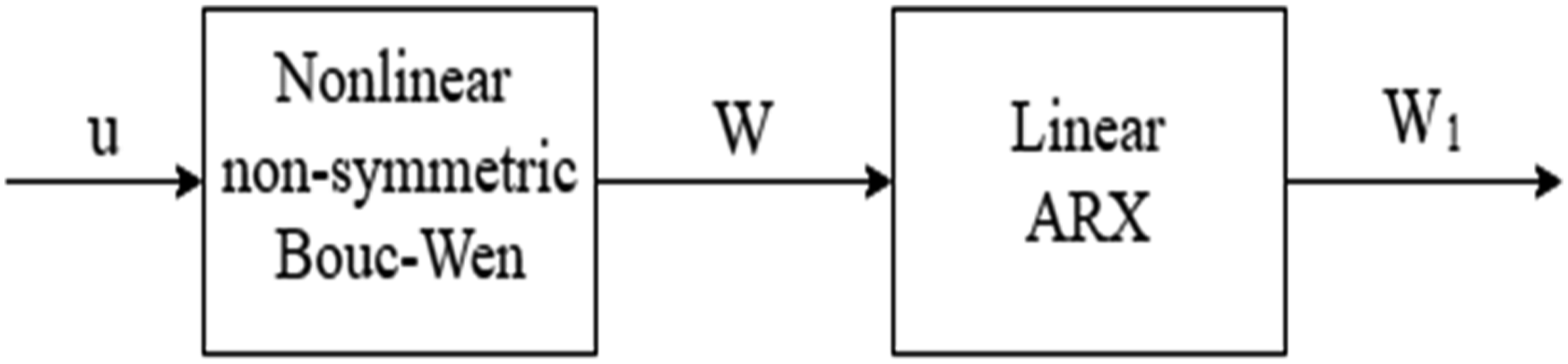


Figure 4 accurately describes the non-symmetric hysteresis and rate dependent behavior of MFC’s. Now we need to identify its parameters. For this purpose, we use differential evaluation algorithm based AmFMMDE algorithm as discussed below.
Parameter identification based on AmFMMDE algorithm
AmFMMDE algorithm
The fundamental Differential Evolution (DE) algorithm
58
consists of several key operators: initialization, mutation, crossover, and selection. These operators collectively aim to discover the global optimum. In the basic DE algorithm, the control parameters, namely mutation factor (
Regarding the initialization operator, generates an initial population of candidate solutions or target vectors. The population size, denoted a
To generate the initial population, one common approach is to use a uniform distribution. This involves randomly generating values within the solution space for each dimension of the target vectors. The solution space is defined by lower and upper bounds, denoted as
For each target vector
By utilizing this initialization process, a diverse population of candidate solutions is created, covering the solution space for each dimension. This provides a starting point for proposed AmFMMDE algorithm to explore and search for optimal solutions in the subsequent generations. Once initialized, the next steps in the AmFMMDE algorithm are mutation, crossover, and selection. These steps are performed iteratively to generate new candidate solutions for each generation.
Now in case of mutation operator, perturbs the elements of a target vector
The proposed AmFMMDE algorithm is outlined as follows

DE/best/1

DE/rand/1

DE/pbest/1

DE/neighbor/1

After the mutation step, the crossover operation is applied to combine the mutant vector with the current target vector to create a trial vector. The trial vector,

After the crossover operation, the selection operator is applied to determine which vectors will be retained in the population for the next generation. The selection process aims to preserve individuals with better fitness values, promoting the propagation of favorable traits and driving the search towards improved solutions. In the selection operator, each trial vector is compared with its corresponding target vector. If the trial vector exhibits better fitness, it replaces the target vector in the population. This selection criterion ensures that individuals with superior performance are favored and have a higher chance of being included in the next generation. We employ a greedy selection strategy to complete our AmFMMDE algorithm. This strategy involves comparing the fitness values of the target and trial vectors, expressed as

Parameters identification
As illustrated in Figure 5, the AmFMMDE technique may be used to estimate the 13 parameters in the Hammerstein model. For this purpose, the fitness function for the Hammerstein model to identify the parameters is as follows Identification of Hammerstein model parameters framework.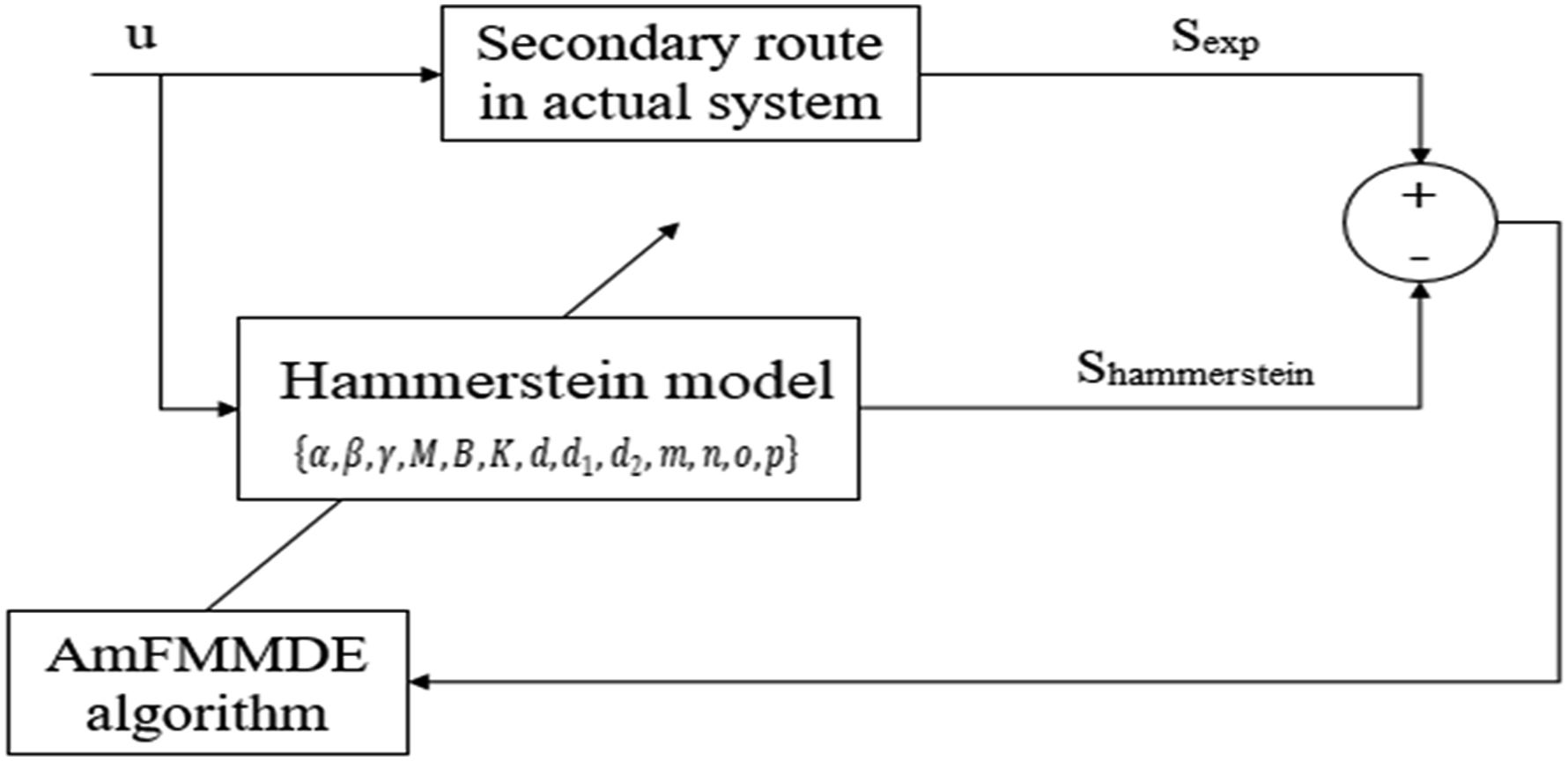

The proposed AmFMMDE algorithm accurately identify the parameters of the Hammerstein model which indicate the efficient hysteretic modeling. Figure 6 shows the flowchart of our proposed algorithm. Flowchart of AmFMMDE algorithm.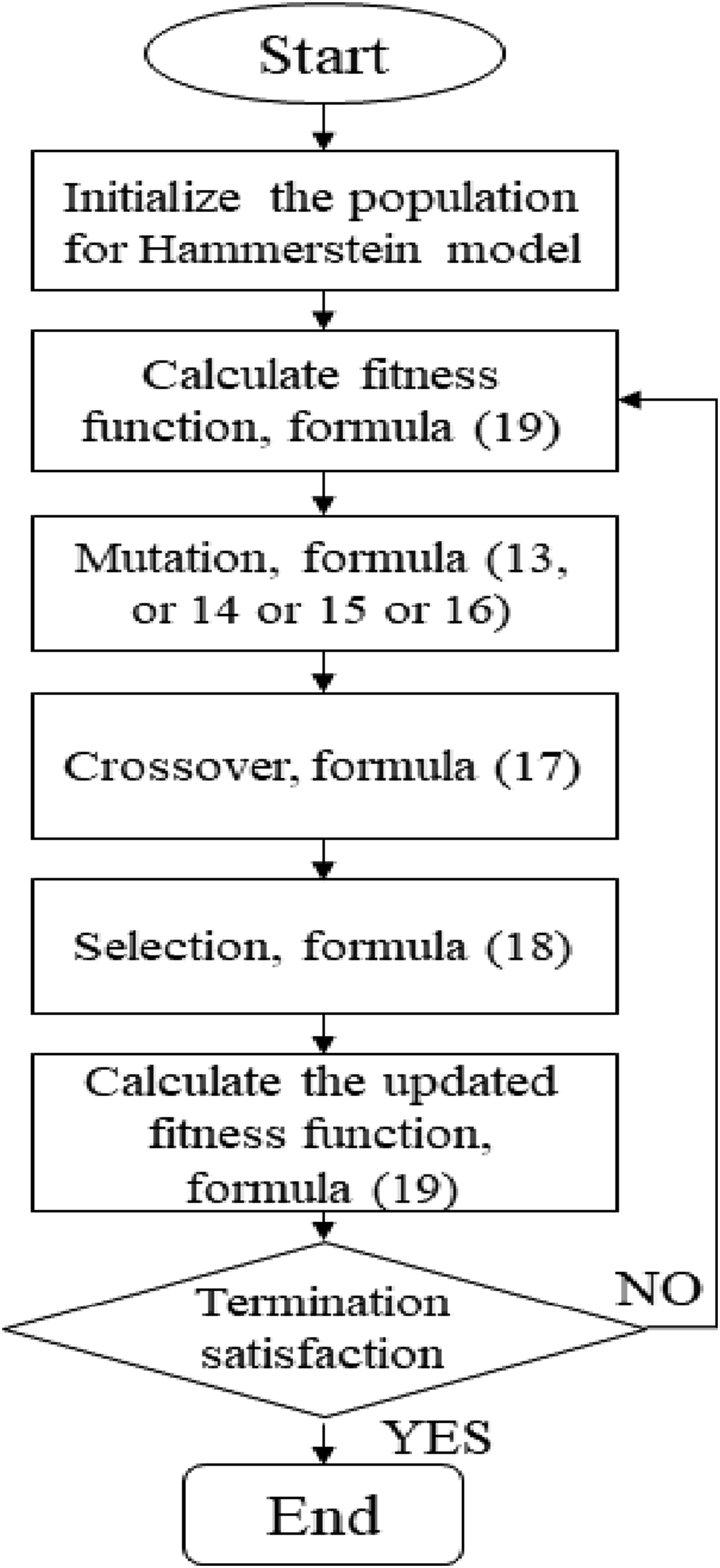
Vibration control experiment
FxLMS algorithm
The FxLMS algorithm is an effective and commonly used for vibration control mechanism. It operates based on a block diagram structure, as illustrated in Figure 7. The algorithm takes into account various components and signals to achieve effective control. In this diagram, FxLMS algorithm schematic.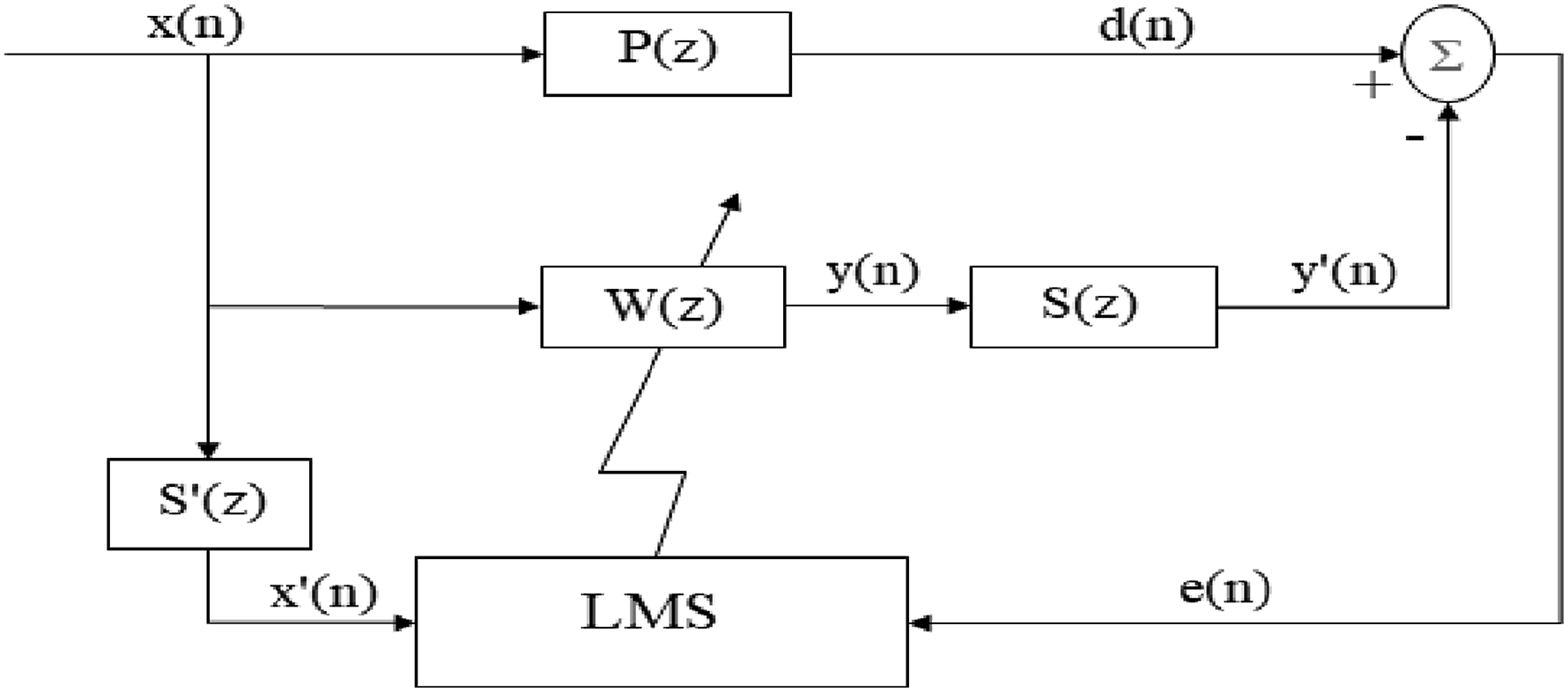


The adaptive procedure of FxLMS algorithm describes as follows
Filtered reference signal

The estimated output of the system expressed as

This estimated output represents the system’s response based on the current weight configuration. In the next, processed output signal

The error signal quantifies the discrepancy between the desired response and the estimated response of the system. Mathematically can be expressed as


The step size, a crucial parameter in the FxLMS algorithm, influences the rate of convergence and the magnitude of the steady-state error. A larger step size can lead to faster convergence but may result in overshooting and instability. On the other hand, a smaller step size can enhance stability but may lead to slow convergence and difficulty in tracking dynamic changes in the system. 61 To address this issue, an enhanced approach called the Variable Step Size Filtered-x Least Mean Square (VSS-FxLMS) algorithm has been introduced.
VSS-FxLMS algorithm
The VSS-FxLMS algorithm is a mechanism for dynamically adjusting the step size throughout the algorithm’s convergence phase. This paper suggested a VSS-FxLMS algorithm with a step size adaptation mechanism that modifies the step size dynamically based on the normalized error change, as follows



The objective function of the active control system, mathematically present as

Experimental verification and results
Experimental setup
The experimental setup for the cantilever beam consisted of several components, namely the cantilever beam equipped with MFC actuators, charge amplifier, power amplifier, Host PC, and Target PC. This configuration is depicted in Figure 8. Experimental platform of active vibration control.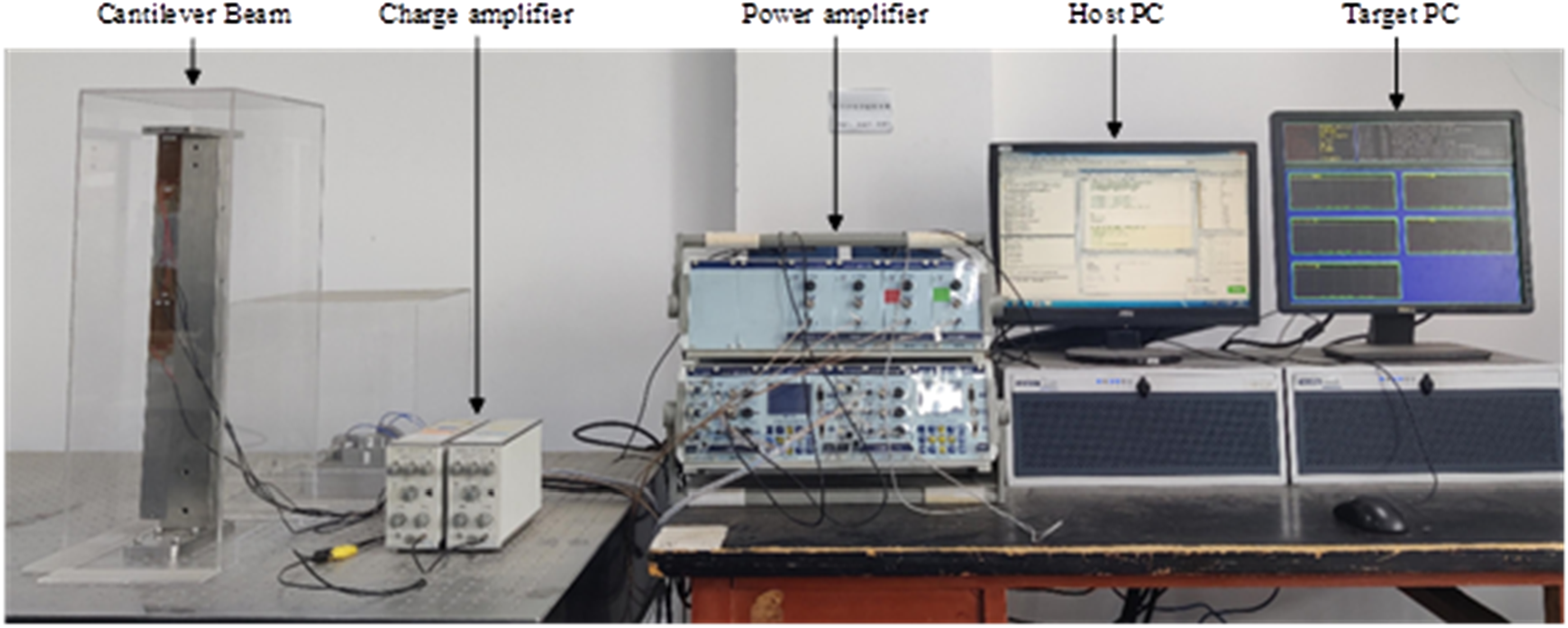
MFC’s parameters.

Furthermore, Figure 9 illustrates a comprehensive schematic diagram of the experimental setup, presenting the framework of the platform in detail. The diagram provides a visual representation of the components and their interconnections, allowing for a clear understanding of the experimental configuration. It showcases the arrangement of various elements and their respective connections. In addition, from the Figure 2, the primary path is the transfer function between the MFC disturbance actuator and the error sensor, and the secondary path is the transfer function between the MFC control actuator and the error sensor. Experimental platform schematic.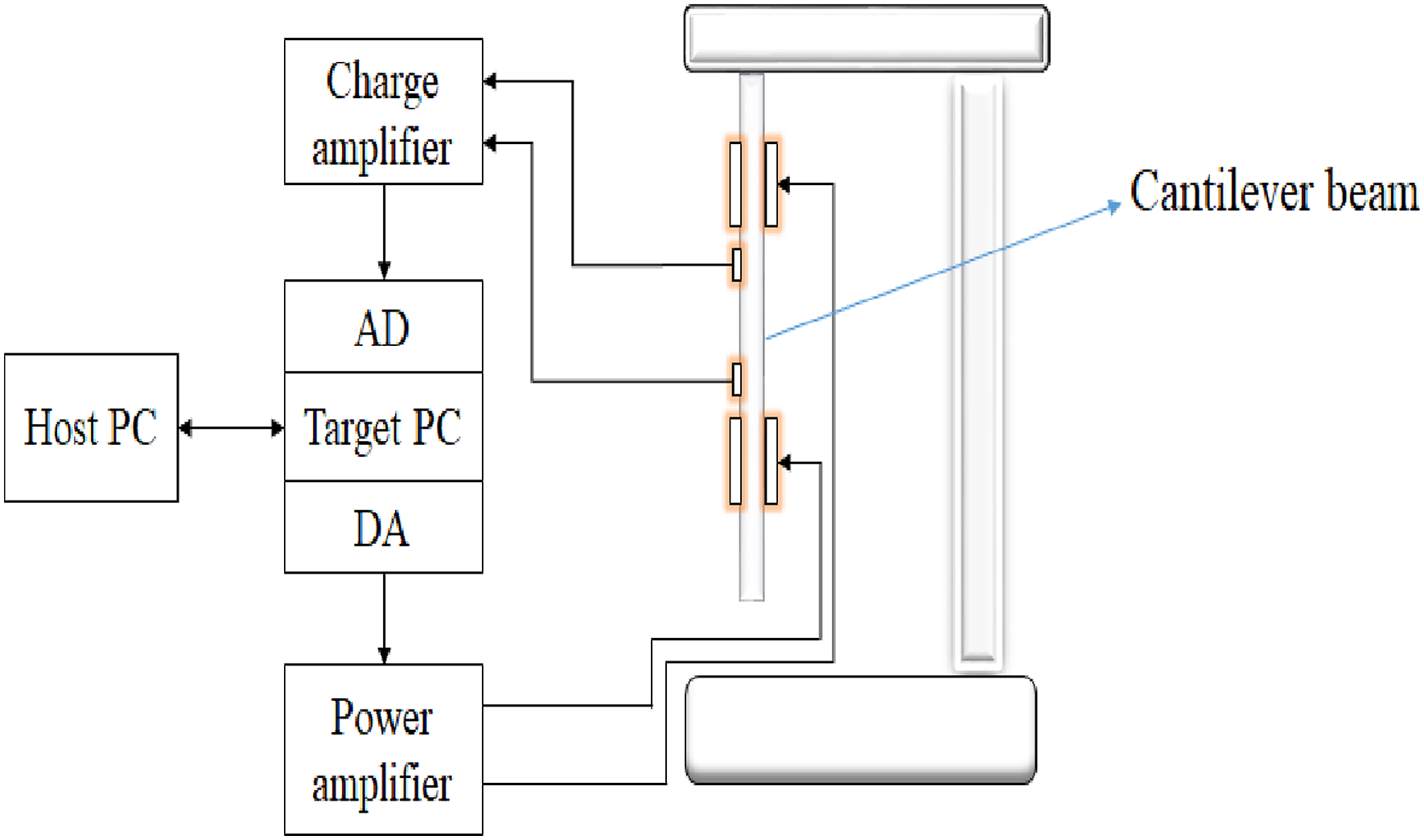
Results
Hammerstein model identification
Model identification is based on the collected input/output data from the secondary path of the experimental platform. To obtain this data, a sinusoidal signal
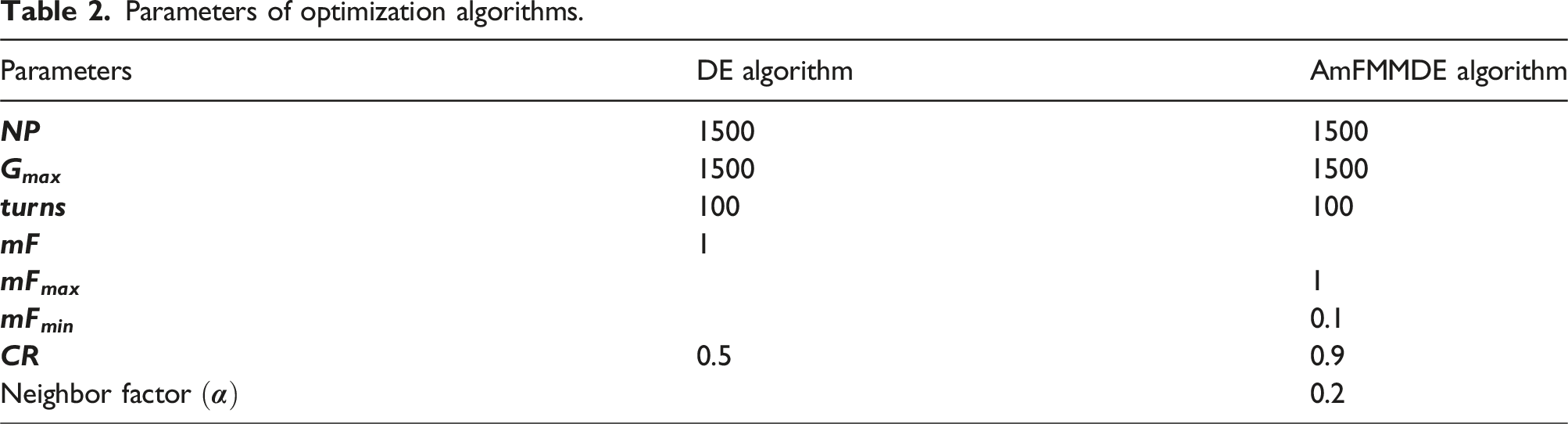
Parameters of optimization algorithms.
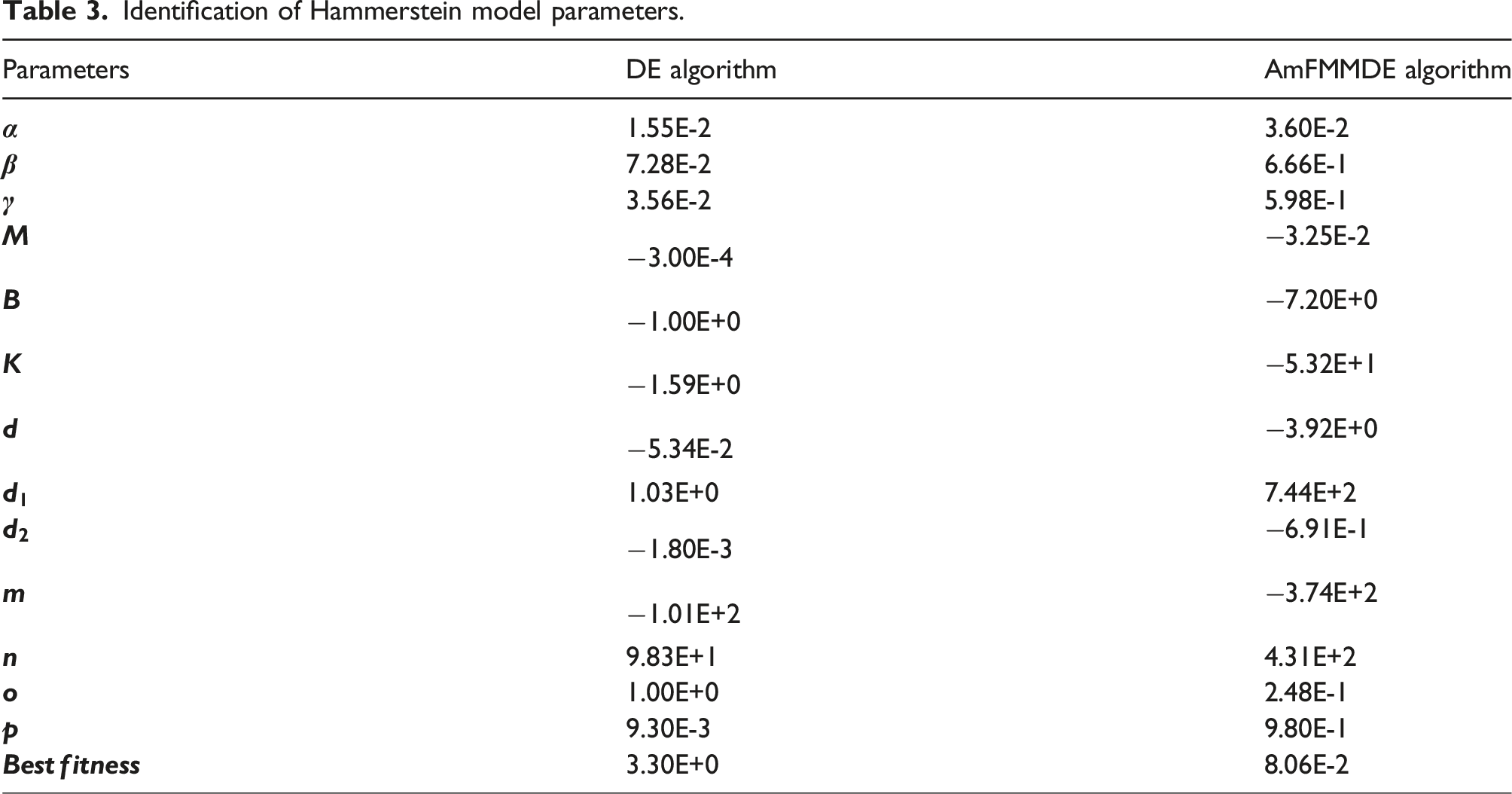
Identification of Hammerstein model parameters.
Additionally, a comprehensive analysis of the convergence rates of the fitness function for the DE and AmFMMDE algorithms is presented in Figure 10. This analysis offers valuable insights into the performance of these algorithms in terms of their ability to achieve significantly lower fitness function values with varying convergence speed. Comparison of fitness value.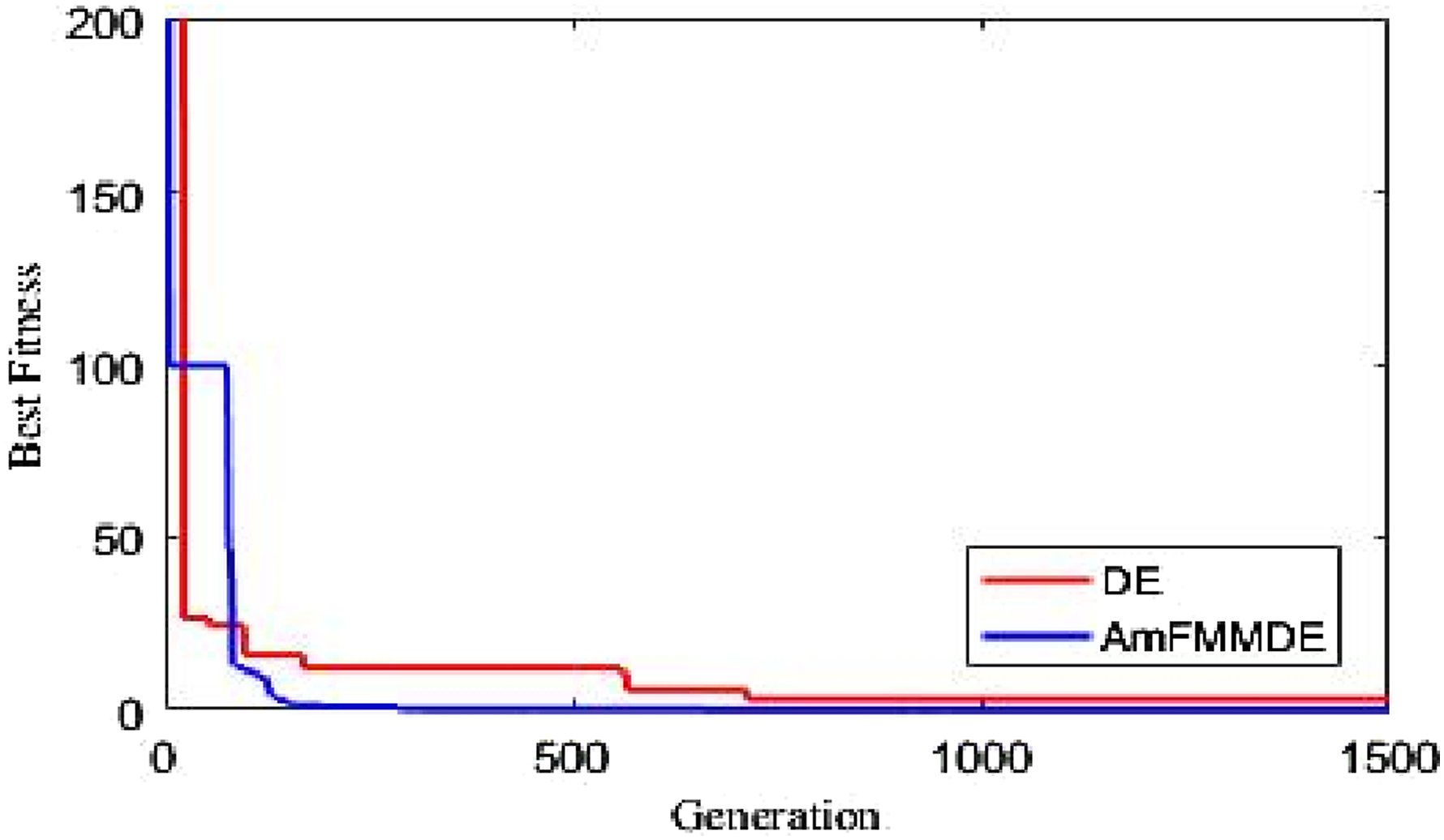
The results clearly demonstrate the iterative progression of the fitness function values, highlighting the efficiency and effectiveness of each algorithm in reaching optimal solutions. The AmFMMDE algorithm, in particular, demonstrates a more rapid convergence to lower fitness function values compared to the DE algorithm and hybrid jaya algorithm, 62 indicating its superior capability in model identification task.
Figure 11 presents a visual comparison between the actual experimental data and the predicted output data for the Hammerstein model, utilizing both the proposed AmFMMDE algorithm and the traditional DE algorithm. The accuracy of the model is assessed by how closely the predicted data matches the actual experimental data. The comparison shows that the output predicted by the AmFMMDE algorithm closely matches the experimental results, demonstrating a high degree of accuracy in parameter identification for the secondary path. Comparison of output displacement curve.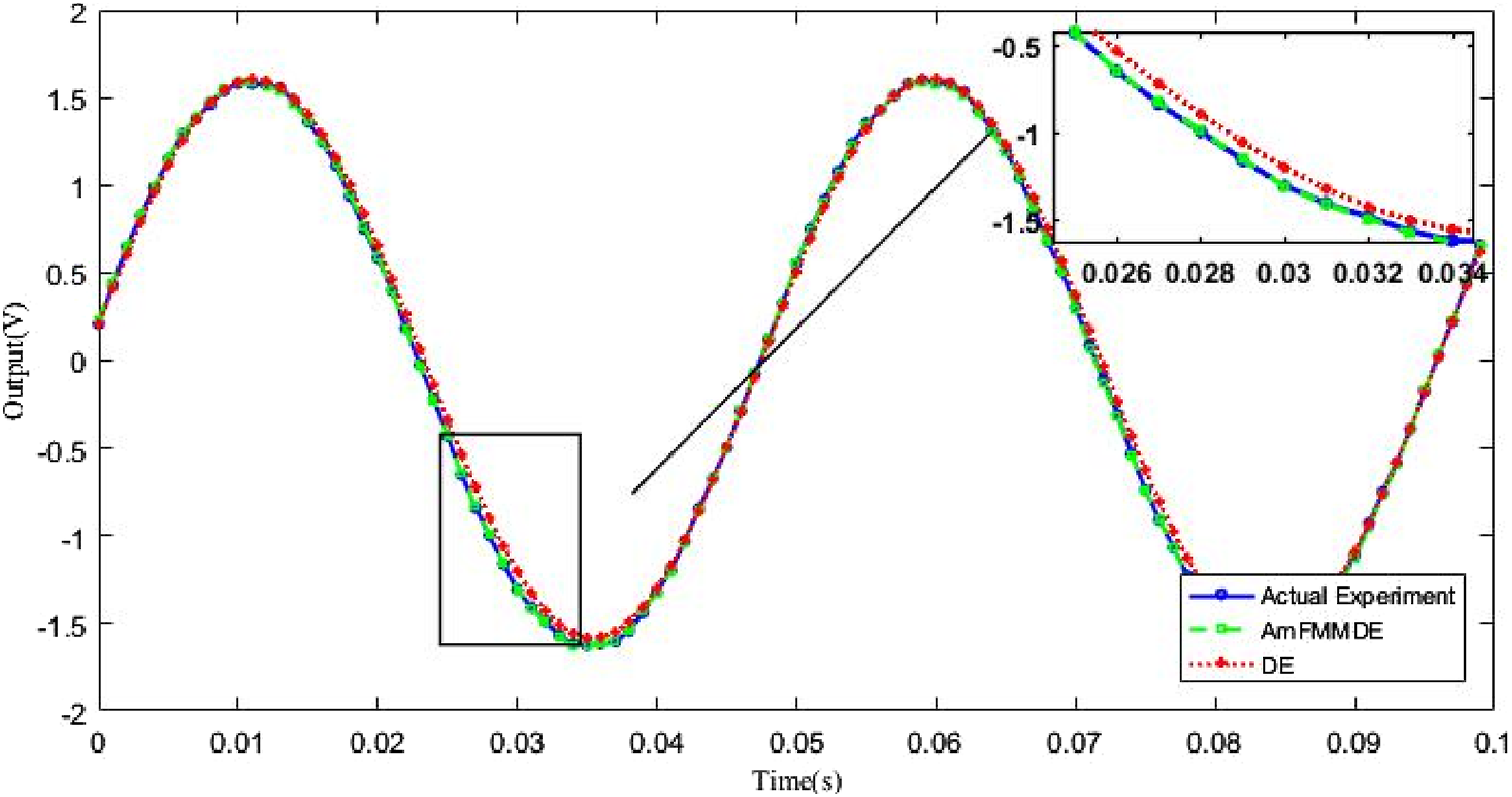
Vibration control experimentation
For the control experimentation, this study employs the FxLMS algorithm alongside the proposed VSS-FxLMS algorithm. These algorithms are tested on an experimental platform designed for active vibration control of a smart cantilever beam. The control system is configured with a sampling frequency of 1000 Hz, and each experiment is conducted over a 60-s period.
The comparison of these algorithms focuses on their effectiveness in mitigating vibration. The disturbance signal applied is a sinusoidal waveform with an amplitude of 3V and a frequency of 20.61 Hz, which corresponds to the second-order natural frequency of the cantilever beam. The step size
To assess the performance of the FxLMS and VSS-FxLMS algorithms, we used two key error metrics: Root Mean Squared Error (RMSE) and Mean Absolute Error (MAE). These metrics are crucial for evaluating the tracking accuracy of control algorithms in vibration control applications.
Comparison of error metrics of control algorithms.

In addition, the performance of the VSS-FxLMS algorithm is evaluated by examining the effect of different constant Comparison of error metrics for different 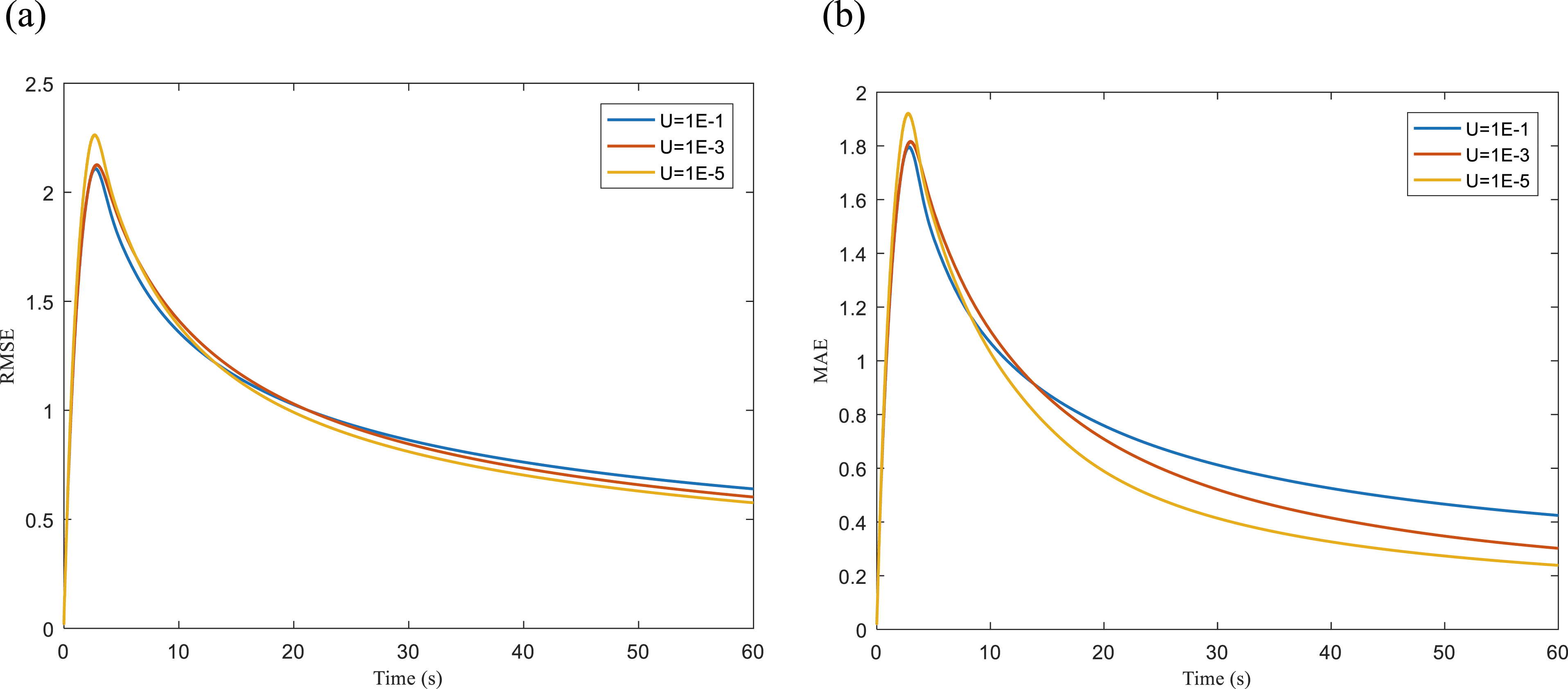
To assess the vibration suppression performance in a more scientific and effective manner, a quantitative evaluation index is introduced by the following formula (31)
Vibration suppression efficiency comparison.

By incorporating the variable step size mechanism, the VSS-FxLMS algorithm offers improved adaptability and robustness compared to traditional fixed step size, FxLMS algorithm. It enables the algorithm to dynamically adapt to changing conditions, leading to enhanced convergence performance and better overall system control. Figure 13 shows the step size variation over time of our proposed VSS-FxLMS algorithm. Figure 14 presents a comparative analysis of the residual errors obtained from the proposed VSS-FxLMS algorithm and the FxLMS algorithm. Variable step size variation. Convergence curves of control algorithms.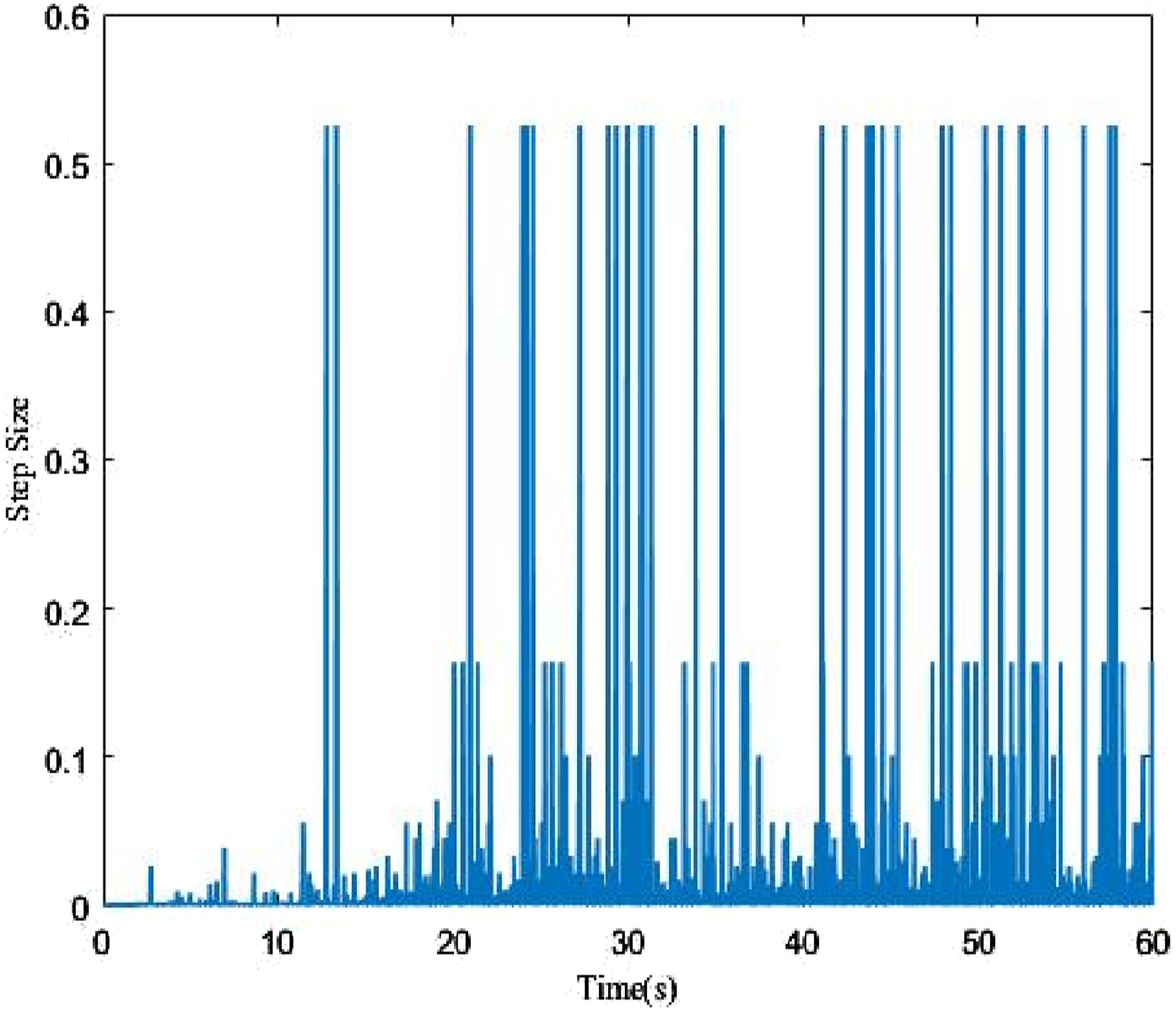
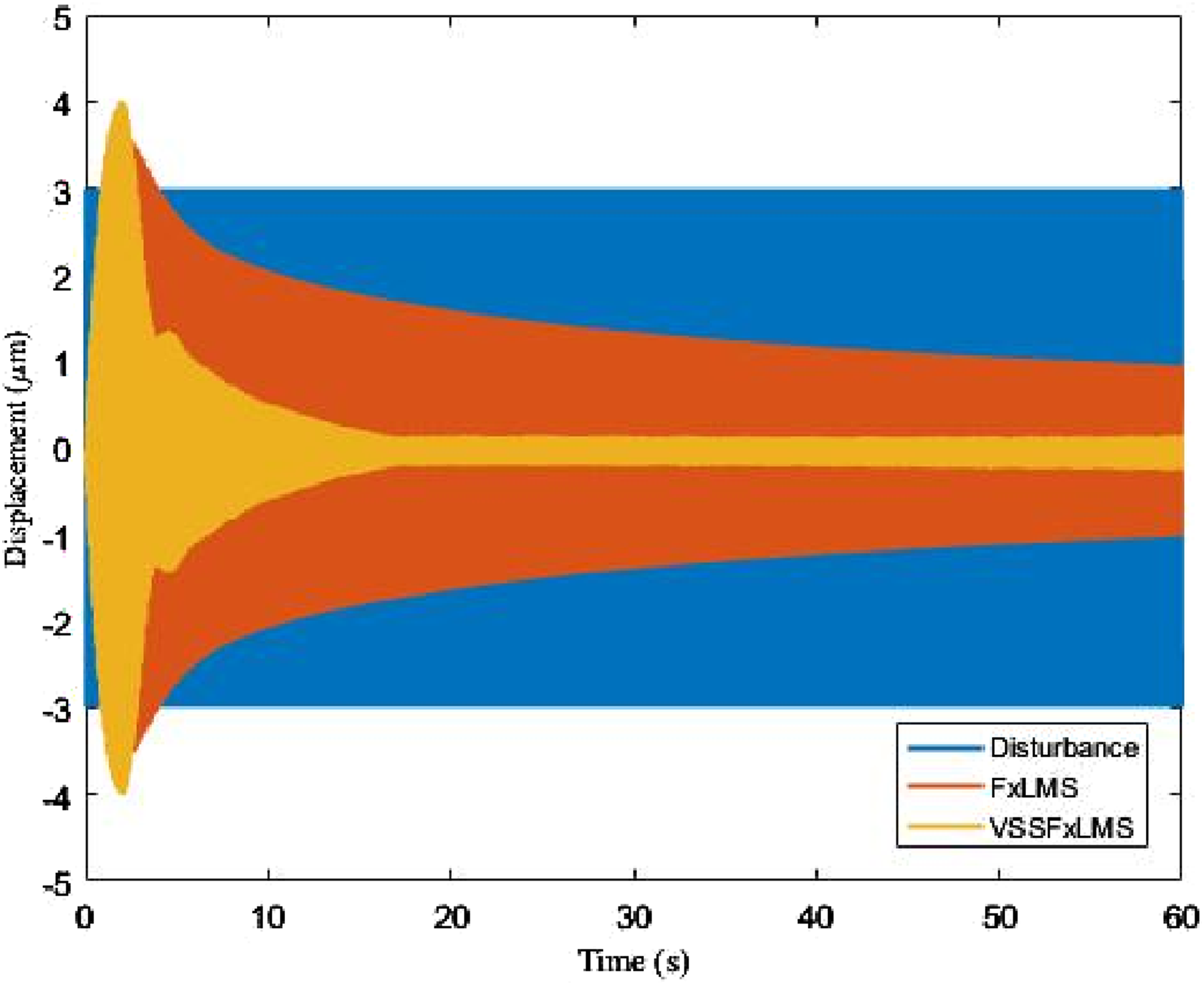
Figurer 14 clearly shows the performance of the control algorithms. It can be seen that the VSS-FxLMS algorithm exhibits significantly faster convergence, quickly reaching a state of equilibrium with minimal residual error. On the other hand, the FxLMS algorithm demonstrates a comparatively slower convergence rate and a relatively higher steady-state error. This visual representation highlights the superior performance of the VSS-FxLMS algorithm in terms of both convergence speed and steady-state error reduction.
Conclusion
This study makes a significant contribution to the field of active vibration control of cantilever beam using MFC actuators. A Hammerstein model, incorporating a non-symmetric Bouc–Wen model, is employed to accurately capture the hysteresis nonlinearity and rate-dependent behavior of these actuators. To ensure precise and reliable system modeling, an enhanced differential evolution algorithm (AmFMMDE) with an adaptive mutation factor and multiple mutation strategies is proposed for the efficient identification of the Hammerstein model parameters. Additionally, the VSS-FxLMS algorithm is implemented to effectively suppress vibrations. By dynamically adjusting the step size based on normalized error changes, this algorithm achieves improved convergence speed and control performance. This adaptive approach ensures optimal control adjustments, maintaining system stability and minimizing steady-state error.
Future directions
Future research will focus on optimizing the parameter identification process and exploring advanced control algorithms to enhance the robustness of the vibration control system. Additionally, experimental validation with various signal types, including broadband signals, will be conducted. Furthermore, the structural dynamic properties of the cantilever beam under different excitation signals will be studied. By continuously advancing active vibration control techniques, we can unlock new possibilities for achieving superior system performance, ensuring safer and more reliable operations in various domains.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (Grant Nos. 52175101, 61503232).