
Abstract
As important bearing members of the suspension and arch bridges, flexible slings determine the bearing capacity and durability of bridges. Therefore, it is of great significance to study its dynamic characteristics for the design, operation, and maintenance of suspension and arch bridges. In this paper, first, based on the Euler beam model, the dynamic stiffness method (DSM) is used to systematically derive the solving formula of the frequency equation of the sling considering bending stiffness under any boundary conditions. Combined with the Wittrick-Williams (W-W) algorithm, an accurate method for calculating the vibration modal frequency of the sling is proposed, and a set of fine analysis theory suitable for the dynamic characteristics analysis of the sling is formed. Second, the accuracy of the calculation method and analysis theory is verified by the degradation of model parameters, literature method and finite element modeling. Finally, the comparison with the measured data of Mingzhou Bridge shows that the proposed analysis theory is feasible in practical engineering. The theoretical system provides a reference for further study of the dynamic characteristics of the sling and guides the design and monitoring of the actual engineering sling to a certain extent.
Keywords
Introduction
Bridge cables (stay cables and slings) are important components of the long-span bridges, which are widely used in modern engineering. With the increase of the slenderness ratio of cables, the transverse stiffness and internal damping decrease. Under the influence of wind load and moving load, it is easy to produce various types of vibration phenomena.1–4 The fatigue caused by cable vibration will cause the performance degradation of the high-strength steel wire, which will not only further reduce the bearing capacity and durability of cables 5 but also bring severe change to the safe operation and normal use of bridges, affect the driving comfort, and even bring visual panic to pedestrians. These problems are closed with the dynamic analysis of cable structure. For slings, the statistical analysis of the existing engineering cases shows that the average service life of bridge slings is only 10 years, 6 and the service life of some slings is even less than 10 years. As the cost of maintenance and replacement is huge, the dynamic characteristics analysis is far important beyond the static analysis. Therefore, dynamic analysis of slings has become a key problem in structural design, performance monitoring and maintenance during operation, and vibration control of such bridges. It also provides an important reference for bridge design, internal force distribution of the cable system during service period, and monitoring and evaluation of the bridge dynamic characteristics.
The existing dynamic analysis theory of the cable structures can be divided into analytical method, numerical method, and semi-analytical numerical method according to analysis methods and solution forms. The dynamic stiffness method adopted in the present paper is a semi-analytical numerical method. Based on the accurate vibration mode function of the system, this method obtains the closed frequency equation and dynamic equation and has a certain accuracy and efficiency. 7 Compared with the finite element method (FEM) commonly used in engineering, the dynamic stiffness method is not affected by the change of structural form, does not require different discretization divisions for structures with different parameters, and can also take into account the calculation accuracy and efficiency. Due to the physical characteristics and stress characteristics of slings, the Euler beam model is used to model the cable more in line with the real structure than other modeling methods.8,9
In 2007, Joseph 10 gave a set of frequency equations to describe the cable system with transverse viscous dampers, which can deal with hinged and rigid boundary, but this model ignored the influence of the sag and inclination. Furthermore, Dan et al. 11 gave a closed-form solution of transverse dynamic stiffness for Euler beam with small sag and studied the variation of transverse dynamic stiffness in space and frequency domain. Subsequently, Dan 12 further gave a unified characteristic frequency equation of the structure and its numerical solution under the joint influence of the lateral force element and the sag effect. At the same time, based on the PSO optimization algorithm, a multi-level and multi-parameter identification algorithm suitable for the cable was given. 13 In addition, based on the Euler beam theory, Han and Dan 14 adopted the distributed spring-connected double beam system model to simulate the composite cable, which derived the dynamic stiffness matrix of the model, and studied the influence of parameters such as sag, stiffness of spring connection layer, and bending stiffness ratio of the double beam on the modal frequency of the system. At present, the research on bridge slings is based on the research theory of stay cables, and previous studies also ignored the influence of the bending stiffness of the slings. However, the influence of the bending stiffness of slings on the dynamic behavior and characteristics of the slings cannot be ignored. 15 In order to obtain an accurate analytical expression and solution method of the dynamic characteristics of slings, further discussion is needed.
In view of this, the present paper will mainly study the dynamic characteristics of the sling considering the bending stiffness, and give a solution system for dynamic characteristics for the single sling. This study is mainly divided into three aspects. First, based on the Euler beam model, the modal frequency expression of the single sling under arbitrary boundary conditions is derived and solved by using the dynamic stiffness method. Second, the W-W algorithm is applied to calculate the sling frequency, and the modal frequency equation of the single sling can be solved accurately by programming. Finally, the accuracy of the solution system in this study is verified by comparing the theoretical analytical solution with model solution of simplified parameters, and contrasting between the present method and the method in literature, as well as the comparison with finite element modeling analysis so that this theoretical method can be better applied to engineering practice.
Basic equation of the sling
Basic assumptions and differential equation of vibration control
A single sling is taken as the analysis object, and its simplified model is shown in Figure 1. Analysis model of single sling.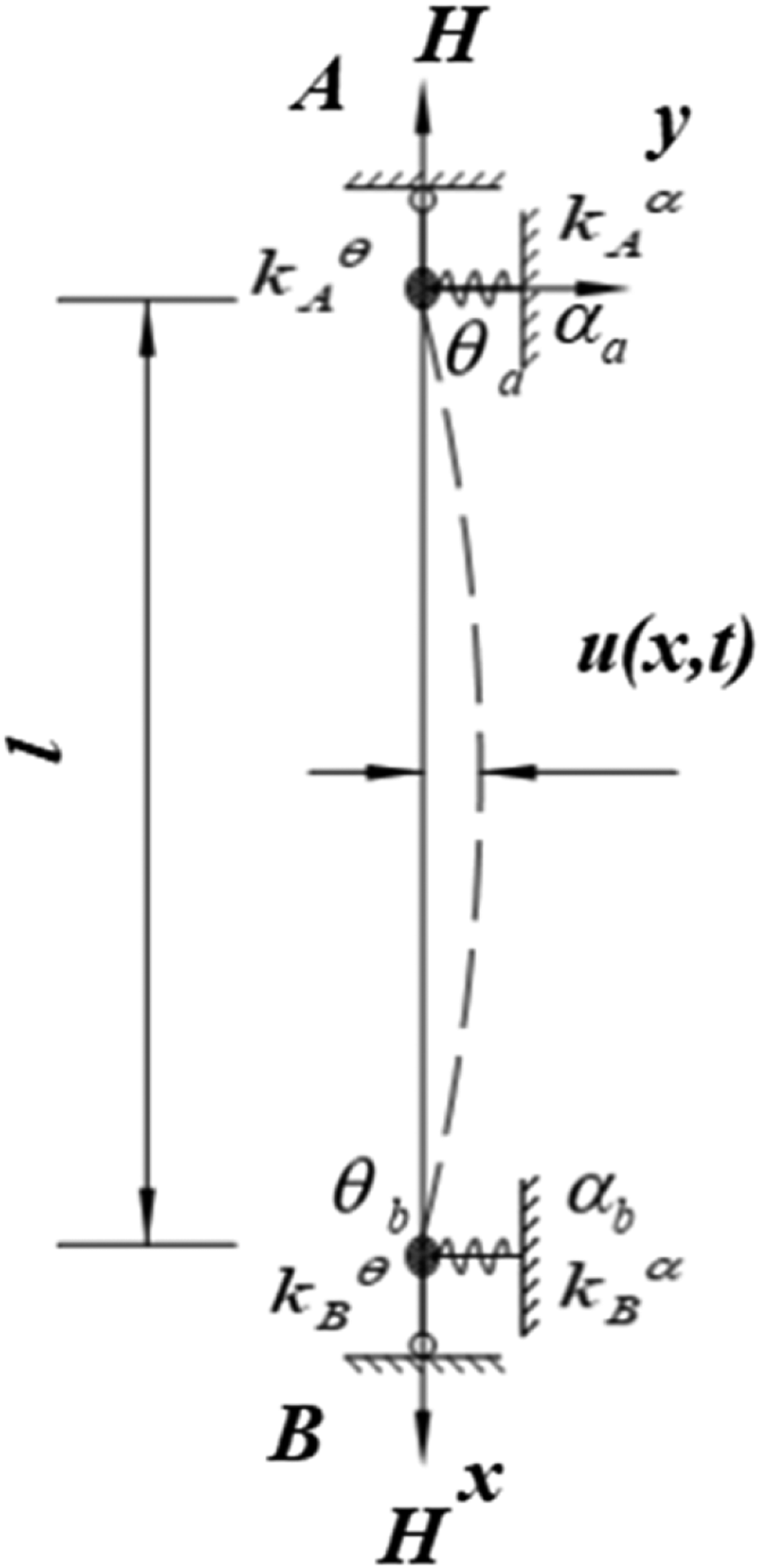
In order to study the vibration of the single sling shown in Figure 1, the following reasonable assumptions need to be made: a. the material property of sling is linear elasticity and the sling is always within the range of linear elasticity during the vibration; b. the strain of the sling is small, and its section size does not change all the time; c. the change of the internal tension along the length of the sling is not considered; d. the sling only vibrates in the transverse plane, and its vertical axial vibration is ignored; e. the bending stiffness of the sling is considered.
Based on the above basic assumptions, the differential equation for vibration control of the transverse load-free vertical sling considering its bending stiffness in the case of no damping is obtained as follows,
16
the equation can also be established by variational theory.
17

This paper aims to study the dynamic characteristics of vertical slings considering bending stiffness. Since the slings themselves are vertical and the transverse vibration of the slings is within a small range, the influence of the static configuration and the sag of the slings on the transverse vibration of the slings can be ignored, while the slings of specially designed arch bridges and suspension bridges need to be studied separately. Based on this, this paper will no longer consider the nonlinear term of the additional sling force, and equation (1) can be further simplified as follows

Frequency equation of the sling system
Based on the dynamic stiffness method (DSM),
18
the transverse displacement function of the sling is assumed.

Substituting equation (3) into equation (2) and the following equation can be obtained:

Introducing dimensionless parameters, ξ = x/l,

Thus, the general solution of equation (5) can be expressed as:


According to the relationship between the nodal force and the displacement function, the nodal displacement of the system represented by the vibration mode function can be obtained.

The relationship between the nodal forces and displacements of the sling is:

Taking into account the differences in symbolic conventions, the forces and bending moments at both ends of the sling are expressed as:

Combined with the vibration function expressions equation (7) and the constant vector, the following equation can be obtained:

Thus, the dynamic stiffness matrix is:

From the boundary conditions of the sling and further matrix transformation, we can get:
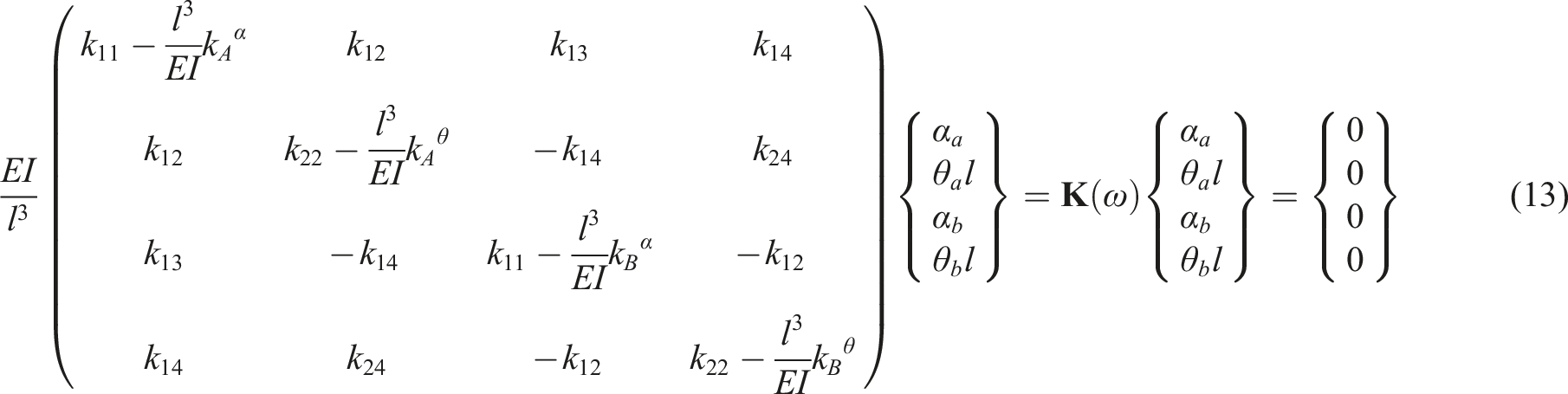
After obtaining the dynamic stiffness matrix of the system, the modal frequencies of the system can usually be solved from the following frequency equation.

Finally, the value satisfying the frequency equation (14) above is exactly the modal frequency of the system.
Solution process of dynamic characteristics
Generally, the frequency equation (14) is a complex transcendental equation. Due to the large amount of calculation work, the Wittrick-Williams (W-W) algorithm
19
is selected to calculate the frequency of the sling. The W-W algorithm was developed in the context of structural mechanics using terminology intended to be friendly to structural engineers rather than mathematicians and is commonly used to analyze structural free vibration, buckling problems, and wave conduction problems. Since the W-W method is widely used, the application and improvement of this method has become a hot topic in structural dynamic stiffness method.
20
Recently, some scholars have used Wittrick-Williams algorithm to calculate the natural frequencies of orthotropic plates under different boundary conditions, aspect ratios, thickness ratios and modulus ratios.
21
The W-W algorithm is not directly used for frequency calculation but used to obtain the number of modal frequencies of the structure less than the trial frequency ω* by counting, so as to determine the upper and lower bounds of any order frequency. Finally, the frequency solution with any accuracy can be obtained by combining the dichotomy or Newton method. Because this method can make the dynamic stiffness matrix keep the Sturm sequence characteristics, and ensure that no root is omitted in the solving process of the equation. Its stability and correctness have been proved theoretically, which is an advantage compared with most analytical methods and approximate solutions, promoting the development and engineering application of DSM The key step in applying W-W algorithm to calculate the structural modal frequency is to determine J, the modal frequency count of the structure, which represents the number of the modal frequencies of structure less than ω*, which is shown in the following equation.

In this paper, the indirect method will be used to solve the fixed-end frequency count J0. First, the boundary conditions of the original structure are changed to obtain the “intermediate structure” which is different from the fixed-end structure. The dynamic stiffness matrix

After calculating the fixed-end frequency count of the structure

Then, the i-th modal frequency of the structure ω
l
satisfies
Therefore, using the above theoretical method, the frequency equation of the sling can be solved accurately by programming, and the modal frequency of the sling can be obtained.
Method validation
Demonstration of parametric degradation model
Expression of the theoretical model
At present, there is an analytical formula of beam theory (BT) considering the bending stiffness, which gives the numerical analytical expressions of the relationship between the cable force and frequency under free vibration when the boundary of the sling is simply supported,
15
as follows:

When bending stiffness of the sling is not considered, equation (18) can be simplified as:

In order to verify the accuracy of the analysis method for dynamic characteristics of the sling in this paper, the present theoretical analysis model is simplified synchronously with the above ideal model, that is, when the boundary condition of the sling is simply supported, the bending stiffness of the sling is considered accordingly, and the frequency equation is simplified as:

The calculation verification
The sling parameters.


Frequency values of each sling.
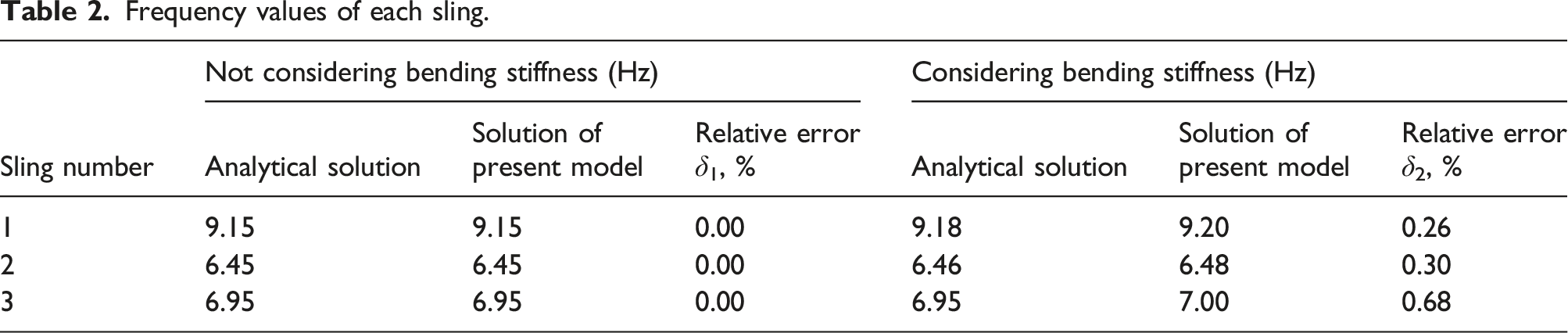
From the calculation results and error analysis in Table 2, it can be seen that the frequency results calculated by the specific analytical expressions are very close to the frequency values calculated by the method in the present paper under the theoretical model. When the bending stiffness of the sling is not considered, the theoretical result is completely consistent with the calculation value in this paper. When considering the bending stiffness of the sling, there is a slight deviation between the calculated value and the theoretical value, but the maximum relative error is only 0.68%. Therefore, by comparing the calculation results of the present theory and the theoretical formula after parameters degradation, it is not difficult to conclude that there is the error can be ignored between them. That is to say, it is feasible and accurate to calculate the frequency of the sling by using the present method.
Finite element method verification
In order to further verify the accuracy of the method proposed in this paper, the analysis process of the elastic boundary beam considering the beam axial force in the reference
23
is used to verify the present method. The frequency of the sling under the boundary conditions in this paper is calculated by using the frequency calculation formula (9) obtained by finite element method in the literature. In the transverse boundary conditions, it is assumed that the displacement stiffness of the transverse supports at both ends Finite element analysis model.
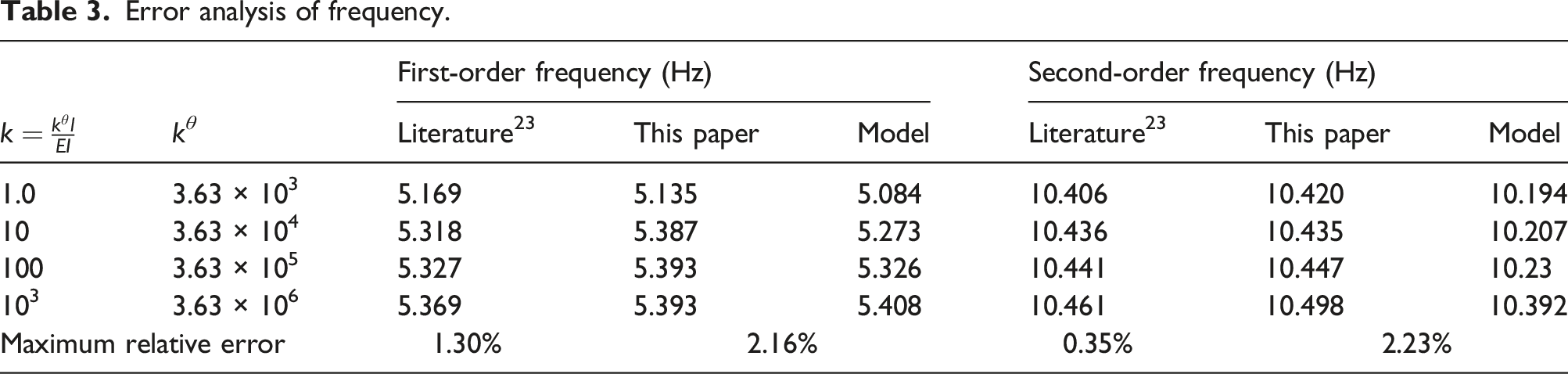
Error analysis of frequency.
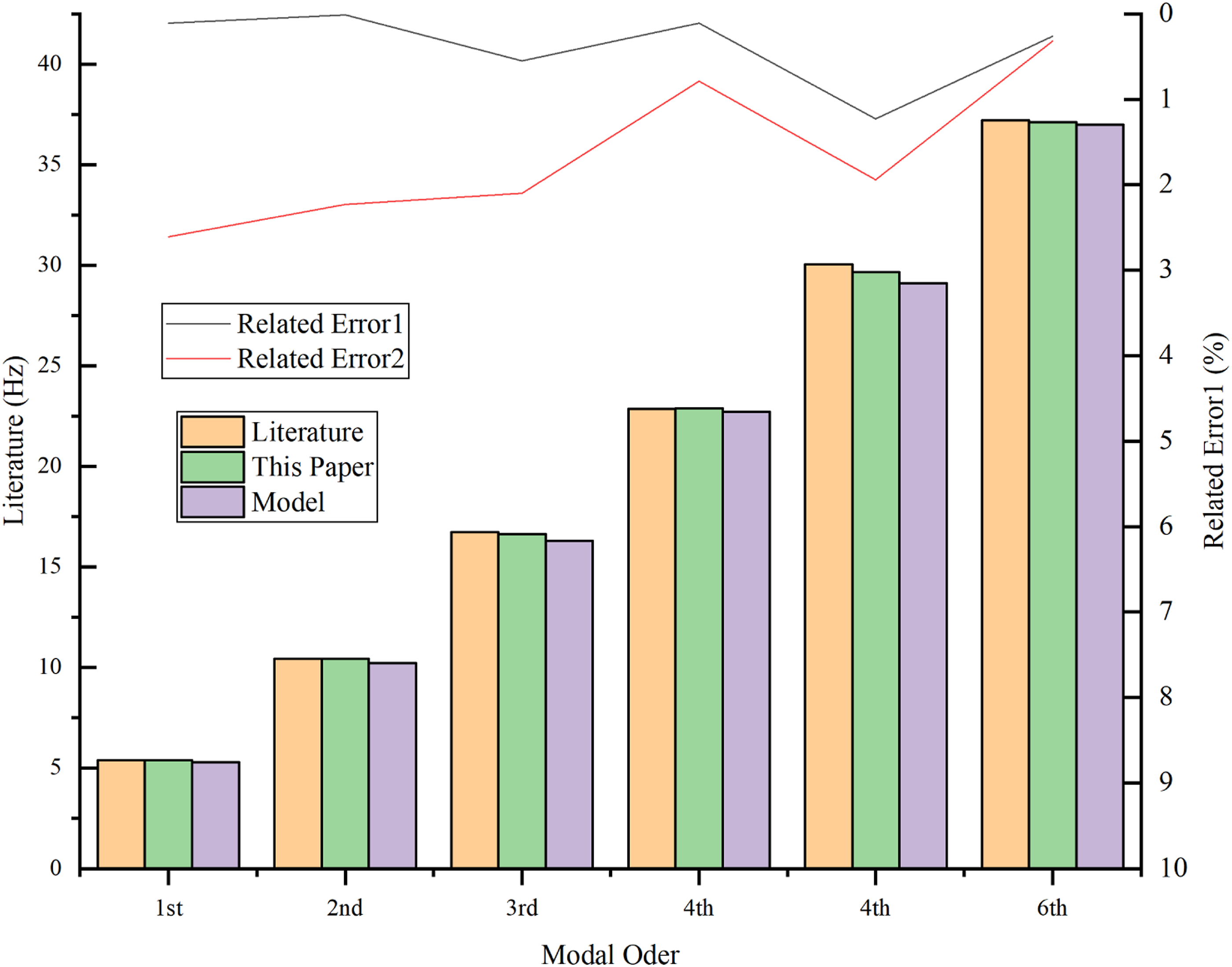
Frequency and error analysis.
From the calculation results and error analysis in Table 3 and Figure 3, it can be seen that the maximum relative error is less than 1.3% when the frequency values of each order under different boundary conditions are calculated by using the existing method in literature and the theory in this paper. Similarly, the sling frequency values obtained by modeling and analysis with finite element software are not much different from the frequency values calculated in this paper. The error analysis shows that the frequency calculated by the present method is very close to the results calculated by the method in literature. That is to say, on the premise that the accuracy of the calculation method in the literature is verified, the modal frequencies of the sling under various boundary conditions can be accurately calculated by the proposed method. At the same time, the use of finite element software analysis will further obtain the verification of the paper’s methods, which greatly verifies the accuracy of the theoretical analysis and calculation method in this paper, and provides accurate theoretical basis for the further application of actual bridge. Moreover, it can be seen from Figure 3 that with the increase of modal order, the relative error does not increase but tends to decrease to be stable, which explains the stability of this method in calculating the dynamic characteristics of slings to a certain extent.
Application in real bridges
In order to apply the proposed method to real bridges, this paper compares the data of actual bridge with the calculation results of the method in this paper, and then determines the practical feasibility of the present method. In the calculation using the method of this paper, the boundary condition determination method in the reference
23
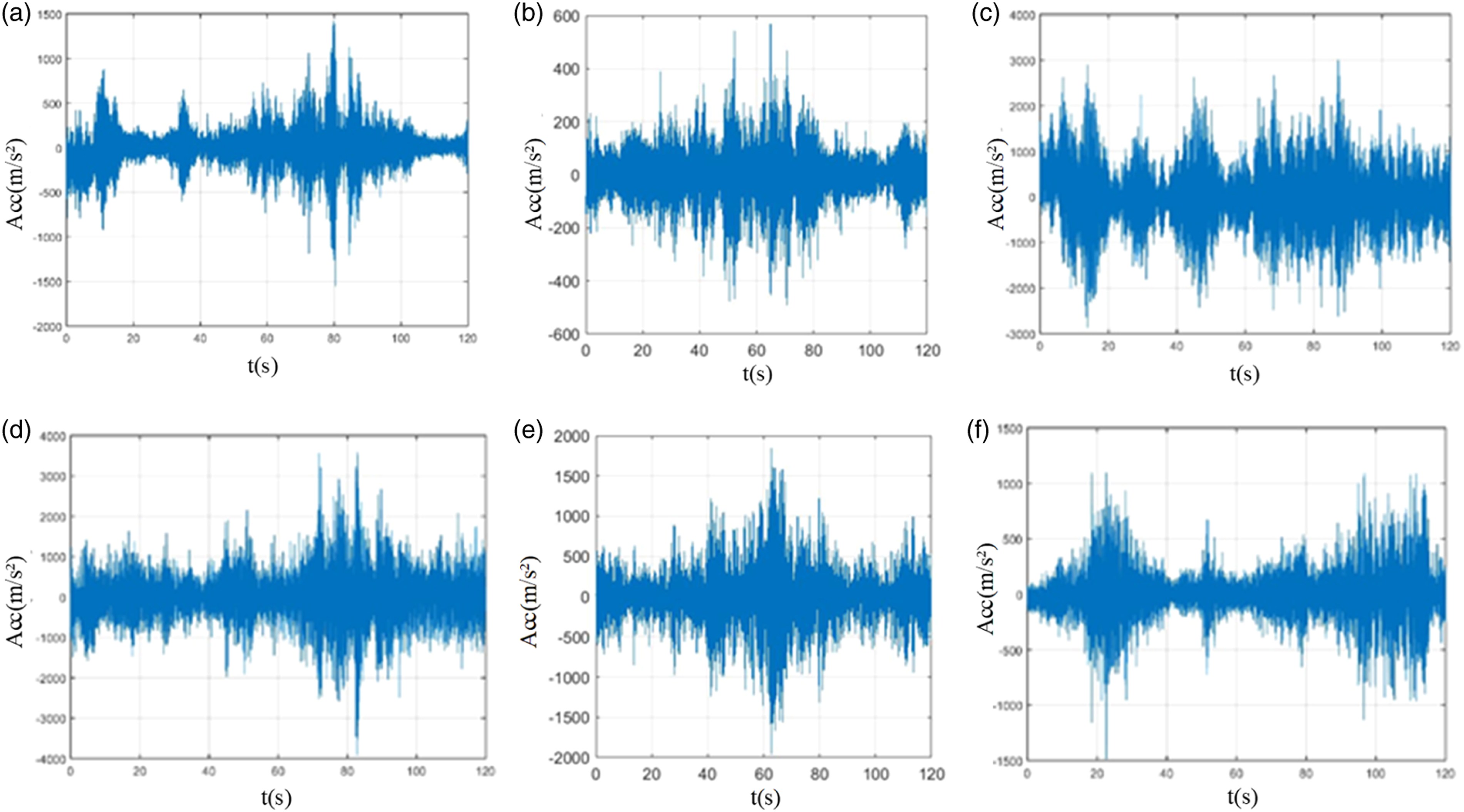
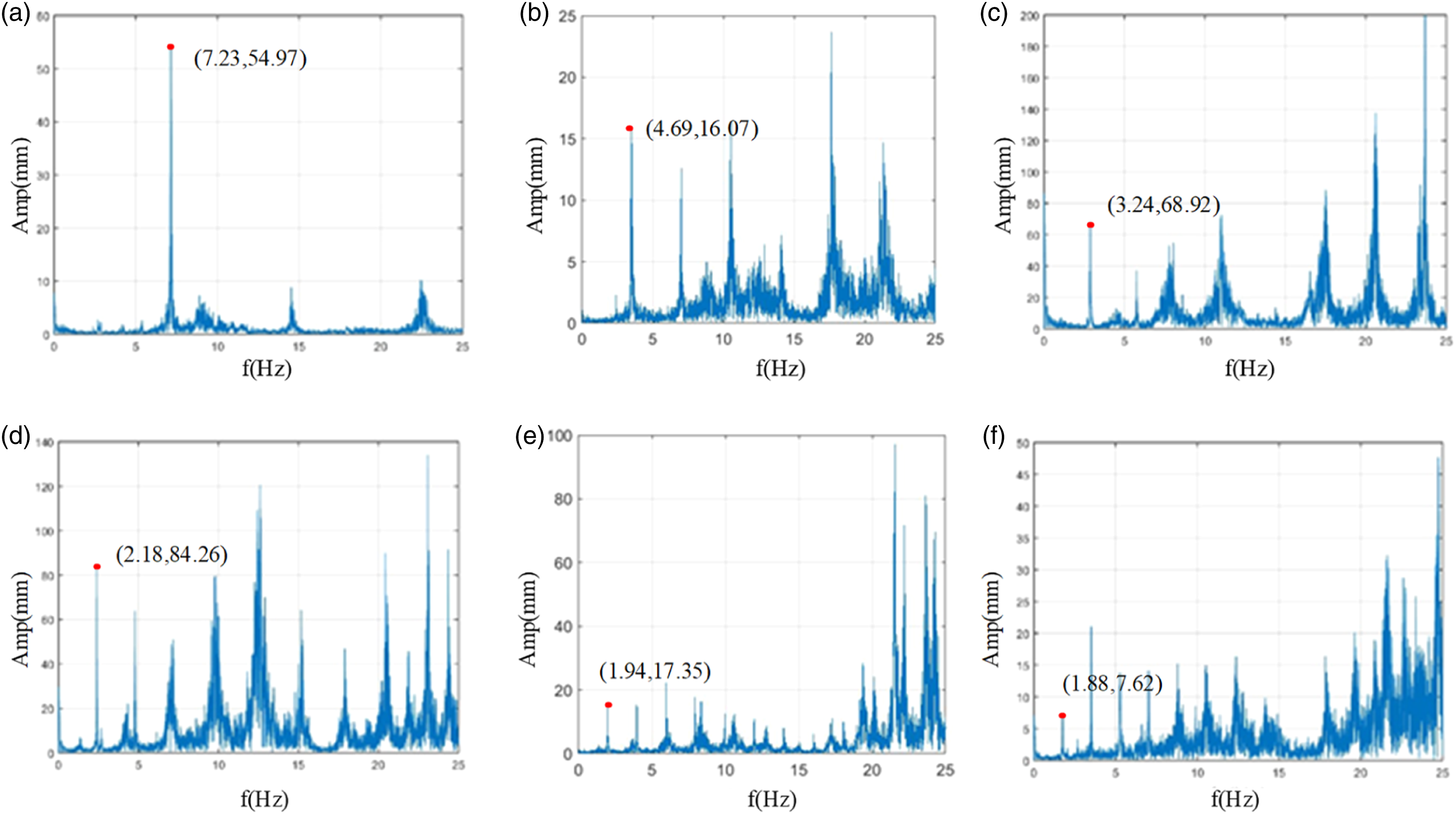
is applied to the determination of the sling boundary condition in this paper. Take the actual measured slings of Mingzhou Bridge in Ningbo, an existing project of our research group, as an example, as shown in Figure 4. Six representative slings D1b, D2a, D5a, D10b, D15a, and D19b on the bridge are selected to compare their measured data with the calculated data using the present model, the calculation and error analysis results are shown in Table 4, in which “Measured values” is the measured first natural frequency of the sling, and “Calculated values” is the first natural frequency of the corresponding sling calculated by the analysis method in this paper. The actual measured data of the slings were obtained by arranging acceleration sensors on each sling, and the time duration of the sling monitoring data analysis was selected as 2 min with a sampling frequency of 50 Hz, and the acceleration signal of each sling was obtained as shown in Figure 5. The Fast Fourier Transformation (FFT) was used to transform the acceleration signal to obtain the measured sling frequency, and the measured spectrum of each sling was included in Figure 6. Mingzhou Bridge (a) Live picture (b) Semi-elevation view. Data analysis of Mingzhou Bridge. Acceleration signal diagram of each sling (a) D1b Acceleration signal (b) D2a Acceleration signal (c) D5a Acceleration signal (d) D10b Acceleration signal (e) D15a Acceleration signal (f) D19b Acceleration signal. Spectrum of each sling (a) D1b Spectrum (b) D2a Spectrum (c) D5a Spectrum (d) D10b Spectrum (e) D15a Spectrum (f) D19b Spectrum.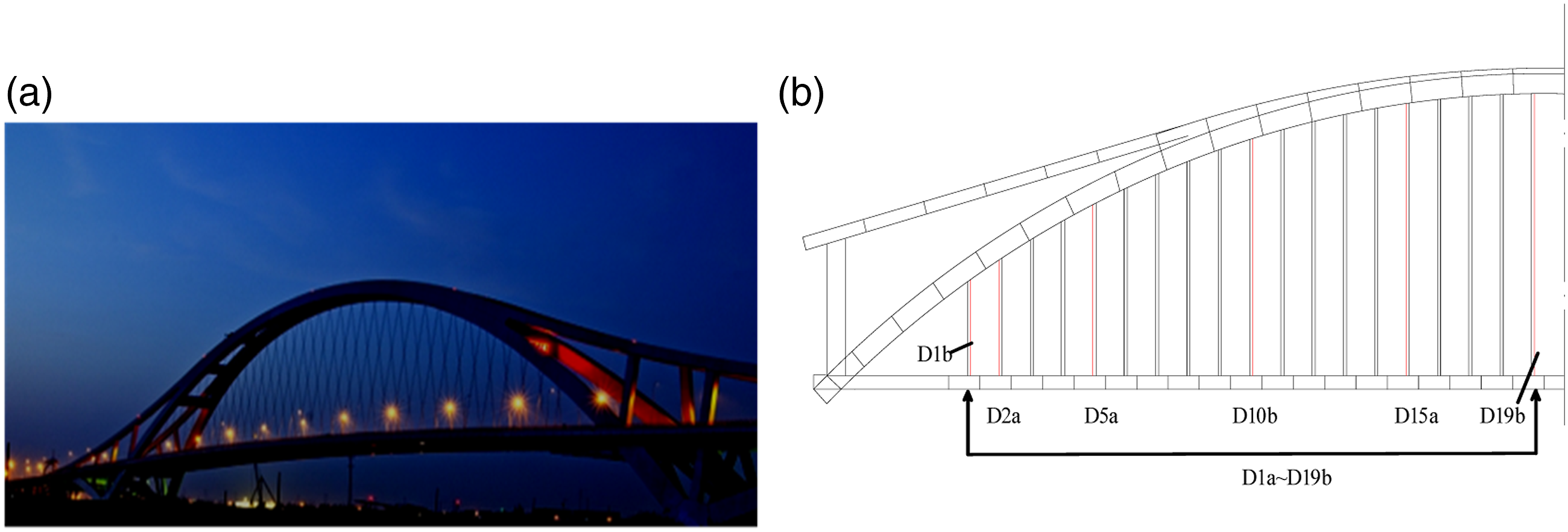
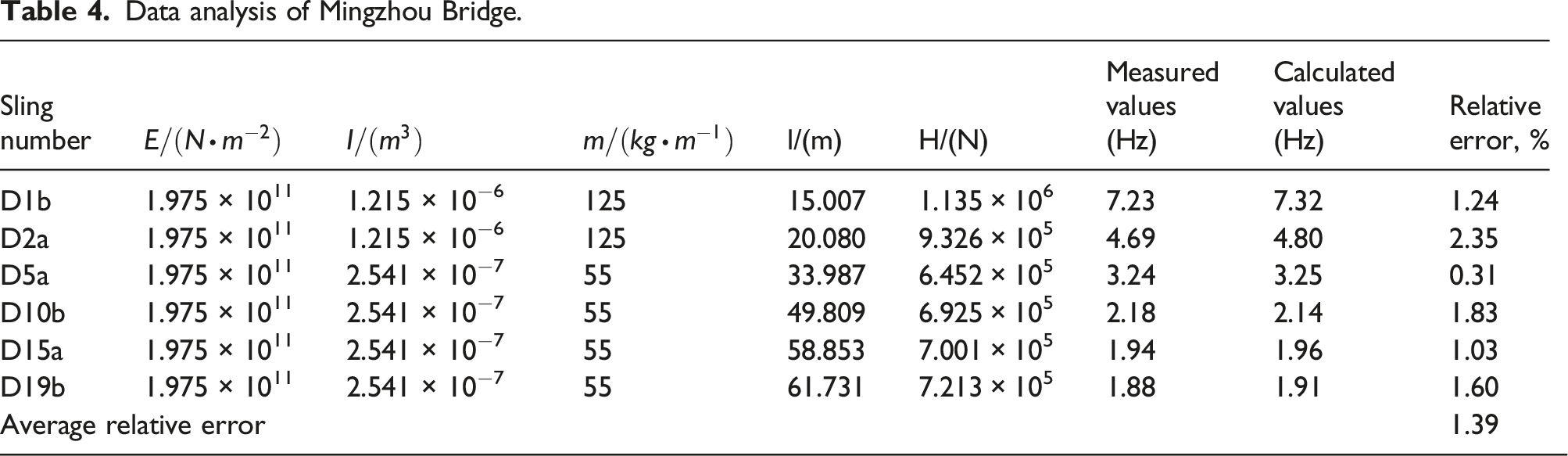
It is easy to obtain from the above table that the average relative error between the frequency value of the real bridge sling calculated by the proposed method in this paper and the measured frequency value of the sling is only 1.39%. The error value which exceeds the average relative error is selected in the table, and it is shown that the maximum relative error does not exceed 2.35%. The main cause of the error is the judgment of the sling boundary conditions, but the relative error is still small and can be ignored. The analysis results show that the proposed method can accurately calculate the modal frequency of the real bridge sling, and it is feasible to apply this method to the frequency calculation of the actual bridge sling. In the actual bridge engineering, the modal frequency of the actual bridge sling can be calculated based on the proposed method in this paper, which can not only save a lot of costs but also provide a new and accurate idea for the monitoring of the actual bridge during operation period.
Conclusions
By comparing the calculated results of the present model with existing theoretical methods, it is verified that the method for calculating the dynamic characteristics of the sling in this paper has a certain accuracy. In the process of error analysis between the measured frequency of the sling and the calculated value of the present method in this paper, the feasibility of the analysis and solution for the sling in the practical application of engineering is determined. The two main conclusions are as follows: 1) the dynamic stiffness method adopted in this paper is an efficient, accurate and stable structural dynamic analysis method, and the W-W algorithm can obtain the accurate solution of the system frequency equation; 2) the influence of the bending stiffness of the structure itself on the dynamic characteristics cannot be ignored. On this basis, the bending stiffness of the sling is considered in this paper.
Through analysis and calculation, this paper develops a set of refined structural dynamic characteristics analysis system which is suitable for sling system, and the accuracy of this method is verified by accurate analytical expressions and various analysis methods, which provides a theoretical basis for further promoting the study of sling dynamic characteristics. The application of this method to the solution of the actual bridge slings can provide a new and accurate idea for the monitoring of the real bridge during the operation period to a certain extent. In engineering practice, different parameters of slings have different effects on their dynamic characteristics. This paper provides an accurate analysis method for analyzing the dynamic characteristics of slings with different parameters. Due to space limitation, this paper does not discuss in detail the specific influence of each parameter of the sling on its dynamic characteristics. In the future, we will use this method to further discuss the specific influence of the various parameters of the slings in another part of the work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Xinjiang University Tianshan Scholar Distinguished Professor Research Start-up Fund [grant numbers 620312327].
Appendix