
Abstract
Determining the cable force and other parameters of cables is important for condition assessment of cable-stayed structures. This study proposes a frequency characteristic equation of transverse dynamic stiffness for cables; this equation is suitable for measuring the vibrations to evaluate the primary factors that influence the accuracy of cable parameter identification. Further, a cable parameter identification method based on the particle swarm optimization algorithm is proposed. The method is suitable for a cable system of arbitrary length and with moderate sag especially when the measurement quality of the modal frequencies of cables is poor. Both numerical case studies and a cable vibration test proved that the proposed method can identify parameters with high accuracy for cables of any length and for cases requiring low-frequency measurement. Moreover, structural modal order information is not required. The extreme case is that only one order frequency can achieve highly accurate result in this way. The proposed method is suitable for parameter identification of short cables, hanger cables, and parallel strand cables, which are commonly applicable in engineering applications.
Keywords
Introduction
Cable structure is one of most crucial aspects of modern structures, especially those that are large. The main part of cable structures contains hanger cables for large-span roofs and hanger cables for bridges. Usually, certain cable parameters are important indices that represent the condition of the structures. There are several types of cables with various geometrical shapes, most of which exhibit less sag.1,2
For moderate sag cables, the vibration measurement methods used for parameter identification are relatively simple, common, easy to use, and cost effective. However, the identification quality is poor owing to the effects of boundary conditions, sag, and bending stiffness. 3 Generally, vibration produces adverse effects in structures. The commonly used method for controlling vibration is the attached damper system.4–6 The damper changes the vibration characteristics leading to a more complex cable system. Moreover, the existing vibration measurements can be applied only if the explicit formulation, which depicts the relationship between the fundamental frequency (or modal frequencies whose order is known) and the cable parameters, is known.4,7 For the vibration measurement schemes with ambient excitation, it is difficult to identify the fundamental frequency and the order of the higher mode frequencies owing to the absence of certain order frequencies in the spectrogram. The strain in polyethylene (PE) sheathed cables reduces its durability. Thus, to decrease the strain in PE jackets, the gap between the steel strands and the outer region of the PE jackets is filled with a layer of mechanically weak material such as factice. However, because of the existence of the mechanically weak layer, the spectrogram measured from the outer surface of the PE sheathing is distorted, which results in missing orders of the modal frequencies. This in turn reduces the precision of the cable parameter identification method of the vibration measurement scheme.8–10 Therefore, it is necessary to obtain a better parameter identification method for the type of cable with a mechanically weak layer.
As mentioned previously, the relationship between the modal frequencies and cable parameters forms the theoretical basis of conventional vibration measurement methods. The relationship can be expressed as an explicit equation for taut strings ignoring sag extensibility and bending stiffness, or an explicit equation considering bending stiffness for hinged taut cables. However, these types of equations will result in significant errors for a considerably common situation considering sag extensibility, bending stiffness, boundary conditions, etc.3,11 Several studies have attempted to reduce these errors. Two approaches are available for solving this problem. One approach is to establish a considerably precise tension–frequency relationship. Ni et al. 12 established a tension–frequency relationship formula considering the effect of sag and bending stiffness. Zui et al. 13 and Ren et al. 14 derived an empirical equation based on the classification of sag–span ratio and bending stiffness. Ricciardi and Saitta 15 proposed symmetric and antisymmetric dimensionless frequency formulae. Dan and Chen 16 obtained the solution for the zero root of this equation using the Newton's method and evaluated the appropriate tension force. The disadvantage of these approaches is their low identification accuracy when used for short cables and the difficulty in obtaining the real order of measured frequency.
The other approach is to convert it into a system identification problem or to adopt the optimization method. Geier et al. 17 and Kim and Park 18 have conducted studies using this approach. The authors adopted the same type of approach to solve the parameter identification problem for a cable–damper system in 2015. 19 In these studies, the order of the measured frequencies is necessary and should match the result of the finite element method analysis or theoretical analysis. Some other drawbacks are large calculating quantity, low efficiency, and unsuitability for real-time measurement, which limits its usage.
With respect to the previous efforts on studying transverse dynamic stiffness20–23 and considering multiple cable parameters, this study aims to establish an intelligent identification method for cable parameters without the frequency order and overcome the drawbacks mentioned earlier. Based on the theoretical derivation, some numerical cases are analyzed, and a cable vibration test is conducted to evaluate the cable force and the moment of inertia of the cables of different lengths.
Cable frequency characteristic equation formulated using transverse dynamic stiffness
To obtain a vibration measurement scheme for an inclined cable, as shown in Figure 1, the inclined cable is clamped at ends A and B, with an accelerometer attached transversely at point C. The angle of cable inclination is
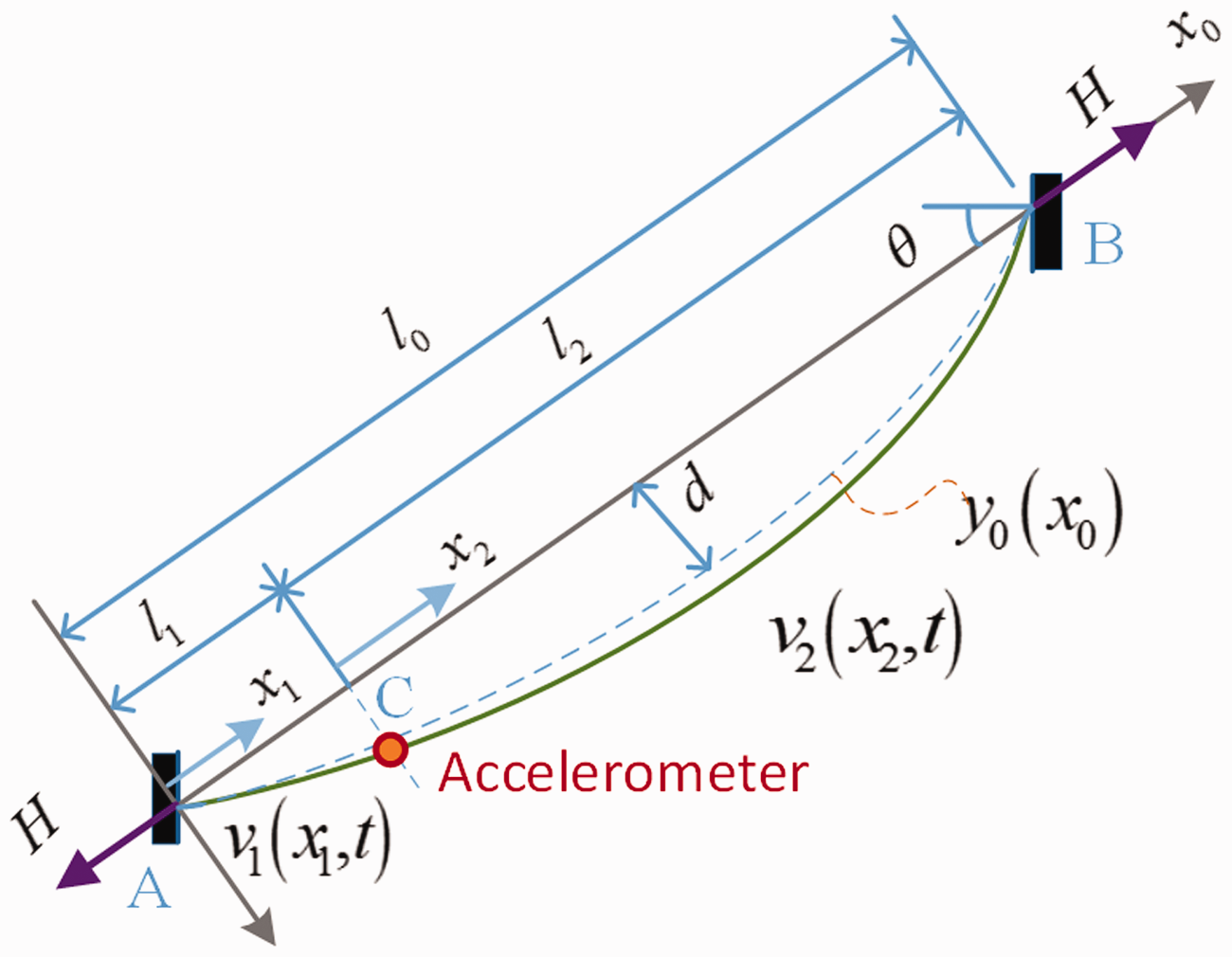
Vibration measurement scheme for inclined cable.
The accelerometer divides the cable into two parts, whose vibrations can be expressed using the following equation of motion separately



In equation (3), vectors

The global dynamic stiffness matrix

Here,

If the cable is fixed at both two ends, the vector for the displacement amplitude can be written as

Assuming that no additional transverse force is applied at the position of the accelerometer, the vector for the node force amplitude can be expressed as

As a result, the global stiffness matrix of the cable reduces to a 2 × 2 matrix, and the equilibrium equation for the free vibration of the cable becomes

Derived from equation (5), the following equation is valid only if the cable undergoes free vibration. Because if the displacement amplitude a(0) is not zero, the value of the determinant of (

Here, the collection of the cable parameters is
Equation (6) is the frequency characteristic equation based on the transverse dynamic stiffness of the cable. If the natural frequency is known, the parameter
Parameter identification model based on particle swarm optimization (PSO) intelligent optimization algorithm
Optimization model
In practice, parameters
According to the derivation,
20
it is difficult to solve equation (6), because


It can be observed from equations (7) and (8) that the parameter
PSO-based solution
Similar to the frequency characteristic equation of the cable observed in this study, the objective function
Apart from the common PSO algorithm, some modified PSO algorithms demonstrate different performance. To obtain the most suitable algorithm for the cable parameter identification, we study the performances of four PSO algorithms—common type, Trelea type 1, Trelea type 2, and Clerc’s type 1. 19
The basic formulations of the four PSO algorithms are the same, as shown in equation (9). However, the difference lies in the values of

Parameter values of four PSO algorithms.
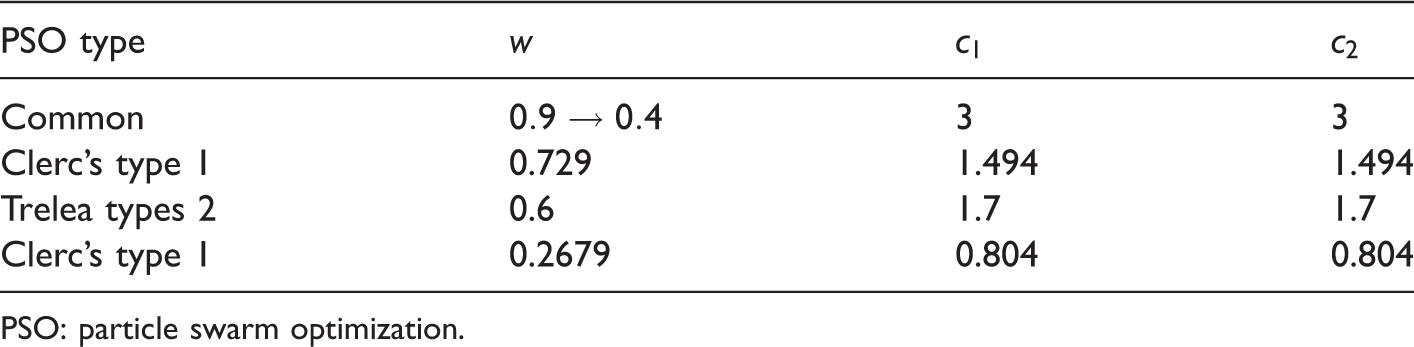
PSO: particle swarm optimization.
The parameters in equation (6) can be determined using the values listed in Table 2, and one of the modal frequencies can be obtained as 5.586 Hz using the calculation method observed in Dan et al.
21
This modal frequency is regarded as the known frequency
Cable parameters.

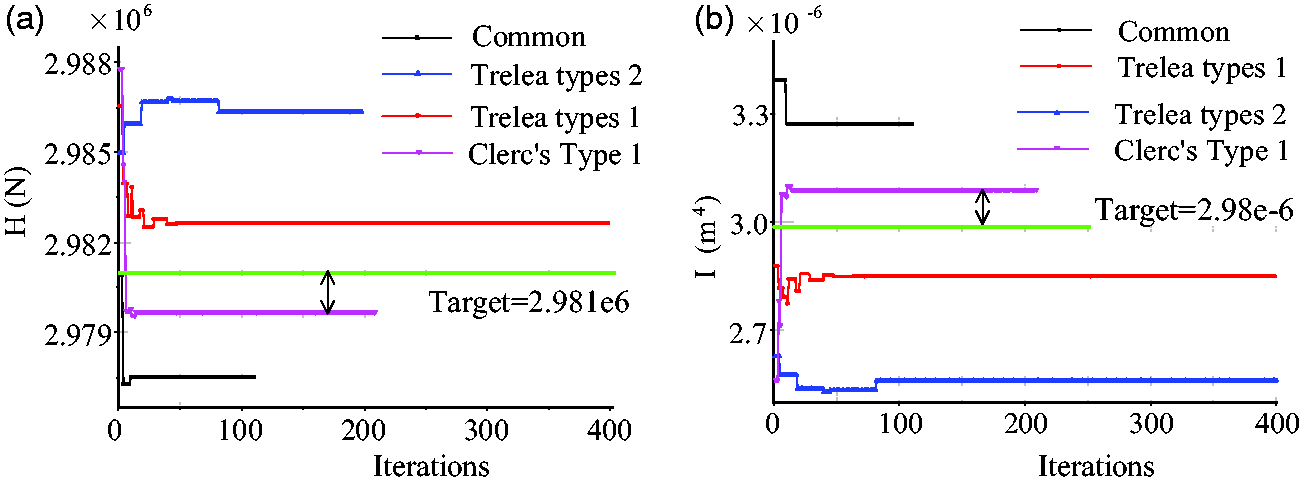
Convergence process of four PSO algorithms. (a) Tension force and (b) inertia moment.
As PSO is a random search algorithm, it is necessary to validate its error and stability. Considering the numerical model mentioned previously as an example, 100 independent identification processes are conducted using Clerc’s type 1 PSO optimal algorithm; two relative error scatter plots of the identification results are obtained, as shown in Figure 3. The relative error is defined as follows

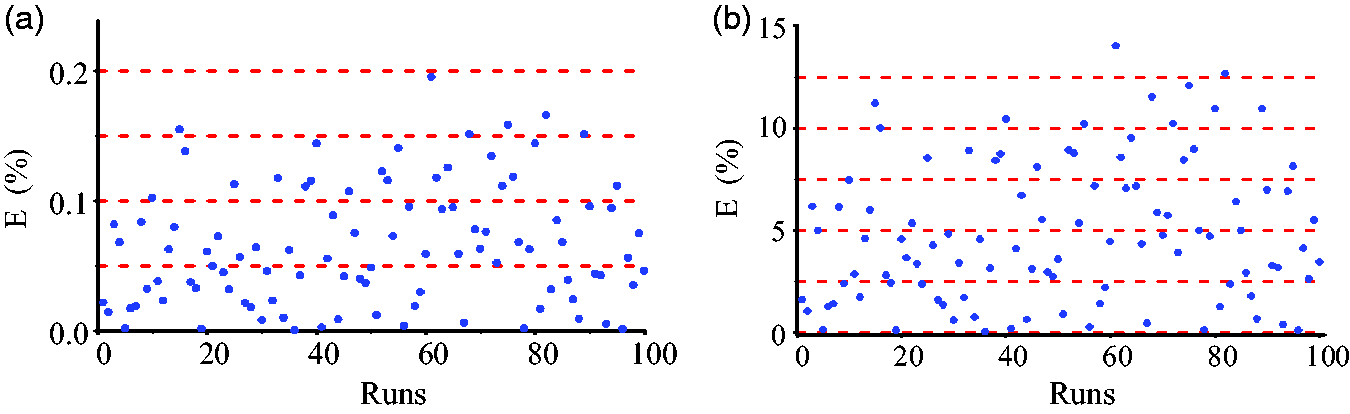
Scatter plot of identification error using Clerc’s type 1 PSO algorithm. (a) H and (b) I.
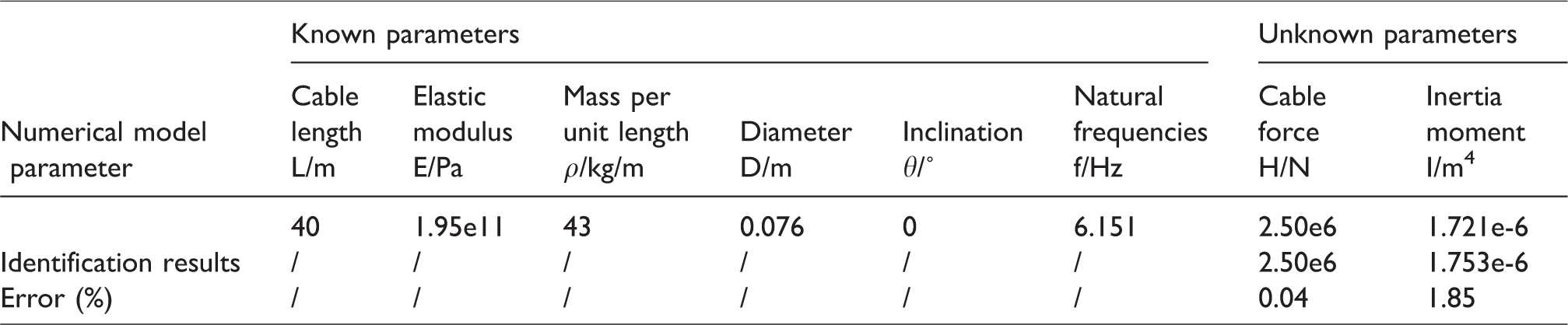
Parameters and identification results for short cables.
Here,
Observed from Figure 3, it is evident that Clerc’s type 1 algorithm can identify the tension force and the moment of inertia simultaneously. The precision of measurement of the tension force is high, and the highest relative error is under 0.2%; the average relative error is 0.065%, which implies that the method has satisfactory stability for tension force identification. Conversely, the relative error and discreteness in the moment of inertia are both relatively high. The highest relative error reaches 14%, and the average reaches 4.84%. Note that there are only 11% identified values, which are higher than 10%; hence, the identification quality of the moment of inertia is still acceptable for certain cases of engineering projects.
Numerical case study of cable parameter identification
The length of the cable evidently influences the identification precision for the stated identification methods. Generally, for short cables of less than 40 m, the identification quality is relatively poor than that for long cables owing to the effect of boundary condition and bending stiffness. In this section, first the quality of the identification method proposed in this study is investigated for different lengths of the cables. Subsequently, a comparison is made between this approach and the formulation methods in the vibration measurement test.
The numerical test procedure is as follows
calculate the frequencies of the given cables using the method in Dan et al.;
20
submit any three order frequencies and known cable parameters to propose the parameter identification model; staring the PSO algorithm and the identification results obtained.
Comparison of quality of identification results for short, medium, and long cables
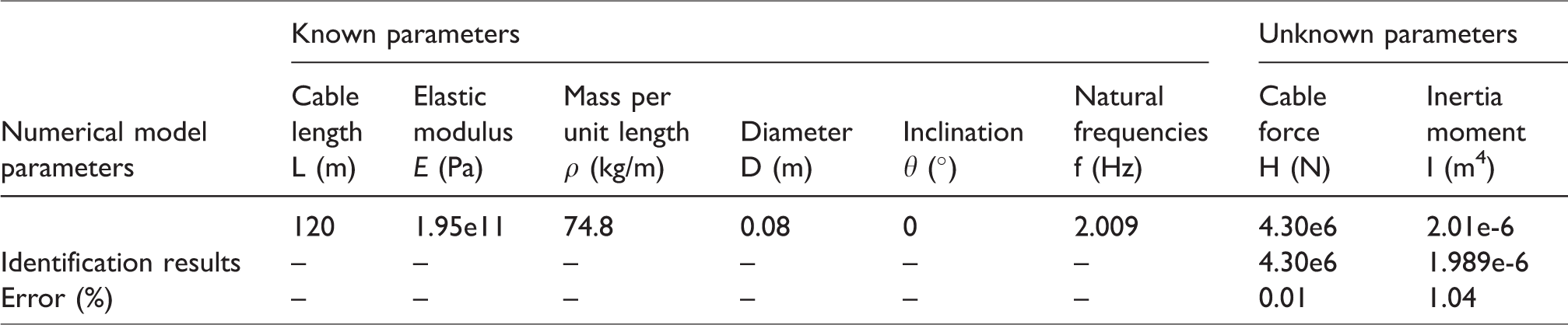
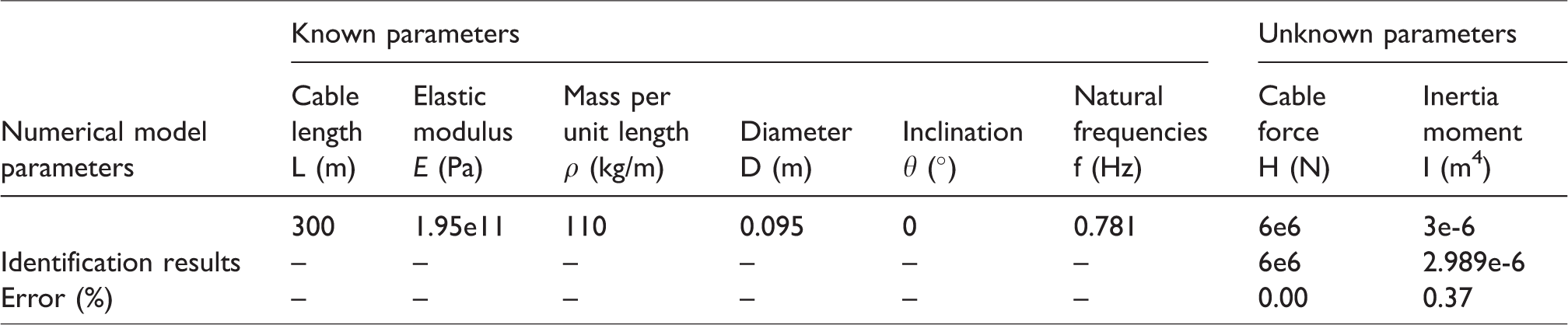
First, the applicability of the proposed approach for different lengths of the cables is studied. The range of parameters to be identified is set as follows: the cable force in [0.8H0, 1.2H0] and the moment of inertia in [0.88I0, 1.12I0]. The identified parameters of the three cables of different lengths are listed in Tables 4 to 6.
Parameters and identification results for medium cables.
Parameters and identification results for long cables.
First three order frequencies and cable force identification results for the three methods.
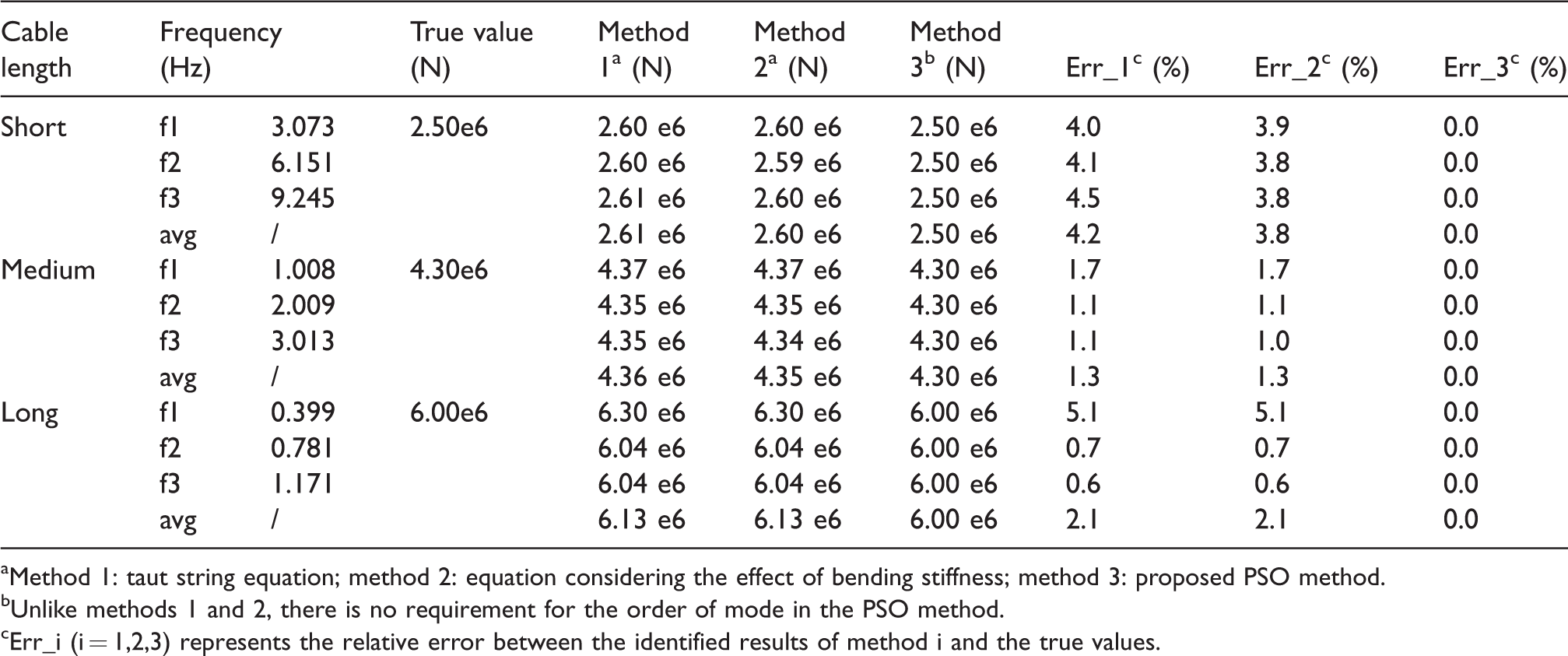
aMethod 1: taut string equation; method 2: equation considering the effect of bending stiffness; method 3: proposed PSO method.
bUnlike methods 1 and 2, there is no requirement for the order of mode in the PSO method.
cErr_i (i = 1,2,3) represents the relative error between the identified results of method i and the true values.
It can be observed from Tables 3 to 6 that the identification quality of the cable force is relatively satisfactory and the relative errors are 0.04, 0.01%, and approximately 0. However, the relative error in the moment of inertia is considerably higher than that of the cable force and decreases with the increase in the cable length. The maximum value is 1.85%, which is sufficient for practical engineering applications. Altogether, it can be concluded that the method is suitable for all cables of different lengths.
Comparison between the taut string equation and the equation considering the effect of bending stiffness
We compare the parameter identification error of the three typical lengths of the cables proposed in this study with respect to the taut string equation and the equation considering the effect of bending stiffness. The two equations are expressed as equations (11) and (12), respectively
3


The first three order frequencies are used to evaluate the cable force using these three methods, and their average values are regarded as the final results. While applying the proposed method, the cable force is considered as the only parameter that requires to be identified, and other parameters are substituted as true values. The frequencies and identification results are listed in Table 6.
It can be observed from Table 6 that the cable force identification errors in methods 1 and 2 are higher than that of method 3, especially for short cables. Moreover, the errors in methods 1 and 2 attain maximum values of 4.0 and 3.8%, respectively. However, the errors in the medium and long cables are relatively low. The result of the analysis obtained using the second- and third-order frequencies is better than that obtained using the fundamental frequency, and the difference in the result for the long cables is approximately 4.4%. The results also indicate that the error in determining the cable force using the first two methods increases with the decrease in the cable length, and the order of modes is not only necessary for the identification, but also demonstrates considerable influence on the identification error, especially for the long cables.
The proposed method in this study exhibits the highest precision among the three methods, and the errors in all the cables are exceedingly low (near to zero). A notable difference of the proposed method compared with the first two methods is that it does not require the order of frequencies. This proves that the proposed method exhibits satisfactory identification quality regarding cable force parameters.
Verification via practical cable vibration test
To further verify the validity and applicability of the proposed method, two cable vibration tests (Figure 4), as observed in Li et al.,
24
are used to identify the cable force and the moment of inertia. The experimental cables are
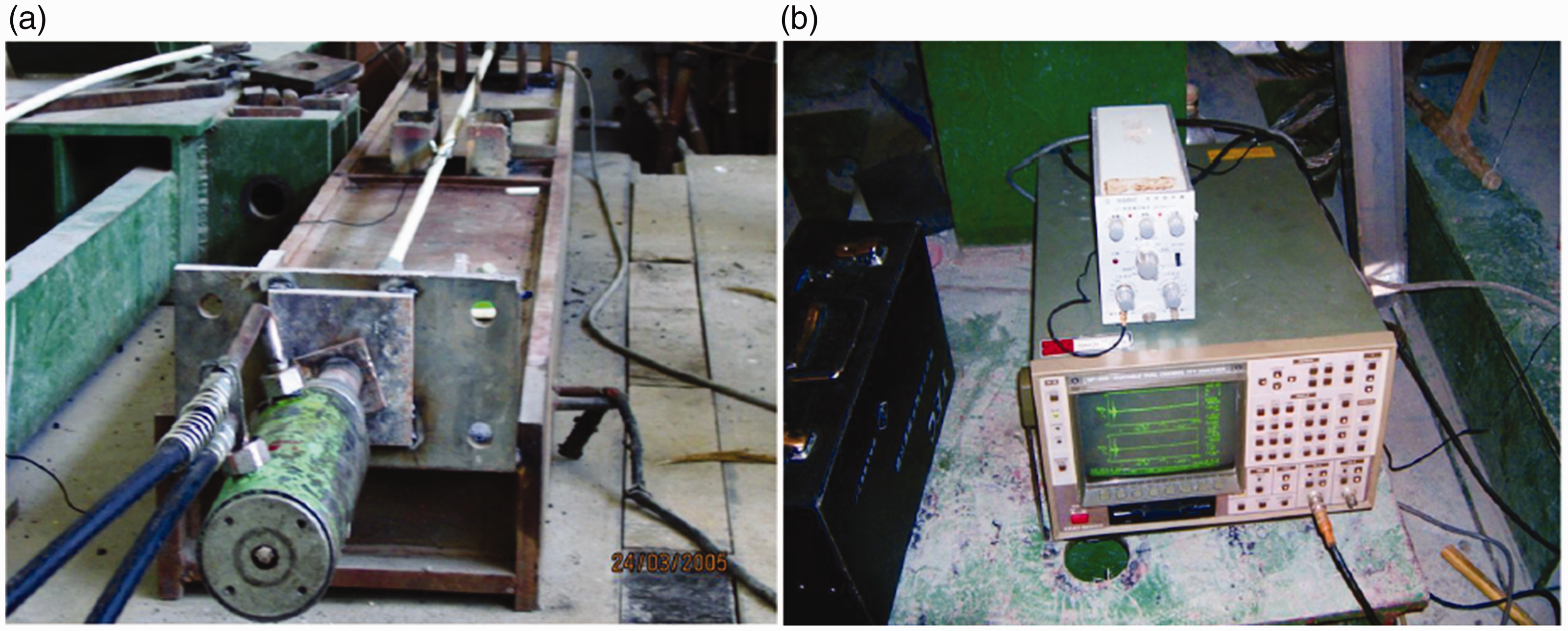
Vibration tests photos of two cables. (a) The test cable and (b) data acquisition equipment.
The experimental procedure is as follows:
24
Use the center hole jack to stretch the steel cable. The tension of the jack is controlled by the precalibrated oil pressure gauge reading. Meanwhile, the strain gauge pressure sensor and strain gauge are used to measure the tension of the cable directly. The loading requirement is realized by controlling the change of tension value applied to the cable. In order to ensure the acquisition of obvious low-order vibration signals, the accelerometer is installed with a clamp at about 3/8 cable’s strength from the cable end. Due to the large damping of test components, it is difficult to distinguish the peak value of the spectrum only by the random vibration of the environment. Therefore, in the experiment, the method of tapping the cable body was used for artificial excitation. After the signal collected by the accelerometer passes through the charge amplifier, it is passed to the signal analyzer, and the measured acceleration time curve and spectrum diagram are displayed on the screen.
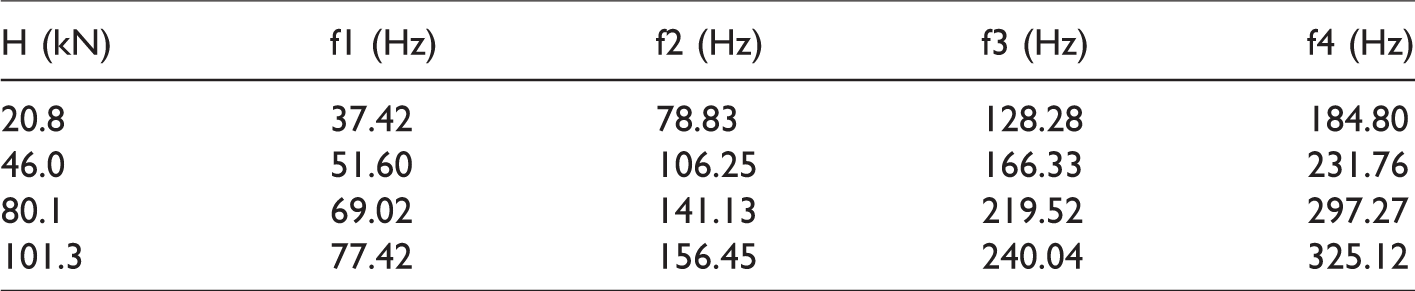
The parameters of the test cable are listed in Table 7, and the measured frequencies of the four test conditions with different tension force
Parameters of test cable.

a
Measured natural frequency of test cable.
The measured frequencies are used to identify the two parameters using the proposed method. Moreover, the taut string equation and the equation considering the effect of bending stiffness are used to calculate the cable force. As the first two methods are deterministic algorithms, while the proposed method is not, we consider the measured frequencies to identify the cable force for all the three methods, and set the average cable force, identified by all the measured frequencies, as the final representative identification result.
Unlike the previous numerical case, the moment of inertia of the real cable cannot be exactly determined. An estimation approach for the moment of inertia is to select the moment of inertia of the equivalent circular cylinder, whose area is equal to the sum of the areas of steel strands, as a reference value, denoted using I0. The moment of inertia of the real cable I0 is lower than I0, which can be determined within the range of 0.3I0–0.7I0. 15 For method 2, the representative value for the bending stiffness is set as 0.5I0. The search range of the moment of inertia for the proposed method is between [0.2I0, 0.7I0], and the search range of the cable force is between [0.8H0,1.2 H0], where H0 is the actual tension force in the test.
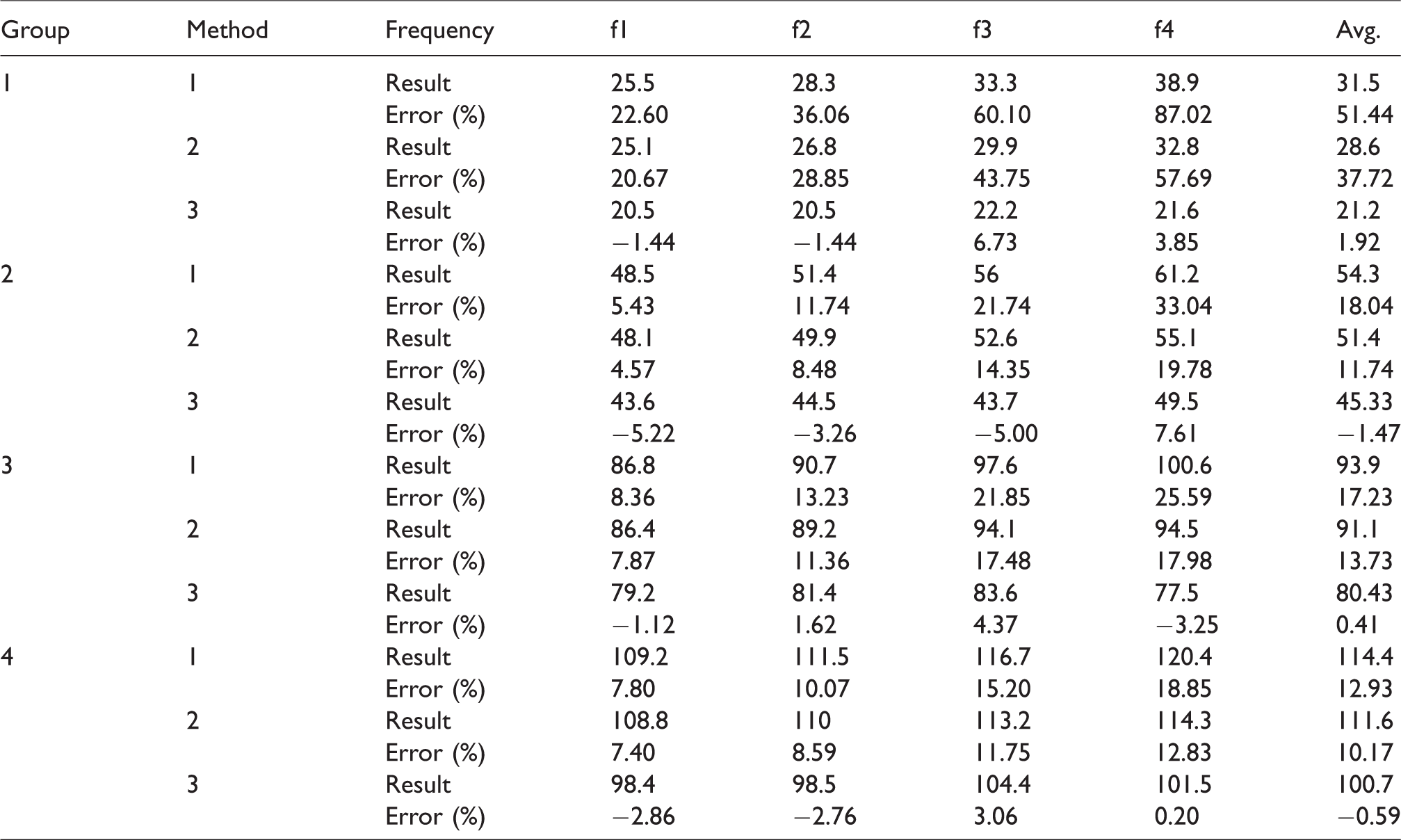
The cable force identification results are determined via four measured frequencies of the four test conditions, which are listed in Table 9. The average values of the cable force and the moment of inertia are listed in Table 10.
Cable identification result of four frequencies.
Final cable identification result.a,b,c
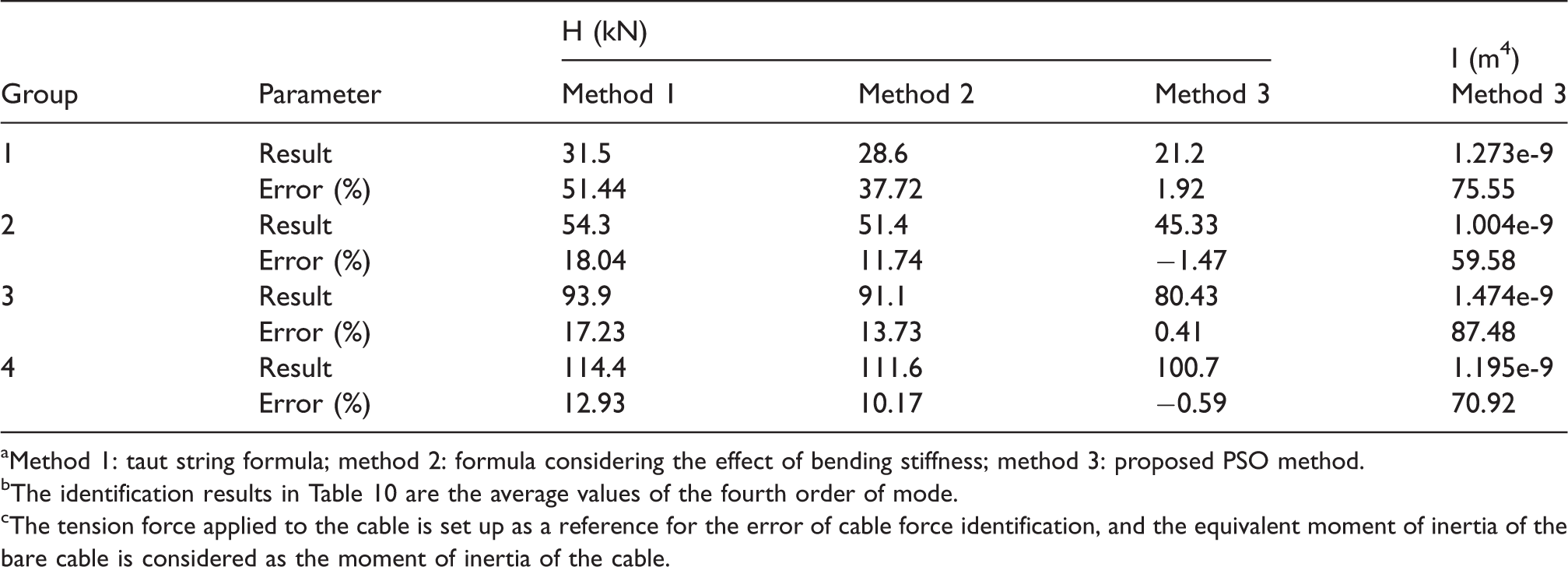
aMethod 1: taut string formula; method 2: formula considering the effect of bending stiffness; method 3: proposed PSO method.
bThe identification results in Table 10 are the average values of the fourth order of mode.
cThe tension force applied to the cable is set up as a reference for the error of cable force identification, and the equivalent moment of inertia of the bare cable is considered as the moment of inertia of the cable.
It can be observed from Tables 9 and 10 that the cable force identification of the first two methods is related to the frequency order of the mode and the cable tension level. In general, their errors are relatively high, and even the minimum error obtained owing to the identification of the first order of frequencies exhibits a considerable value of 4.57%. With the increase in the order of mode, the error increases rapidly to an unacceptable level in practice. In the real vibration test of the cable, both the fundamental frequency and the order of higher frequencies cannot be easily determined by the measured acceleration data; certain alternative method to estimate the fundamental frequencies or the orders of higher frequencies will induce additional error with respect to identification. Therefore, the performance of the first two equation-like methods is not satisfactory, especially in the case of short cables, which is exceedingly affected by the boundary condition and the bending stiffness.
However, the proposed method in this study exhibits a better performance for low and higher orders of modes. The error is within the acceptable range of engineering requirements and the identification error is independent of the frequency order. Moreover, if the mean of the parameters identified via the different frequencies is considered as the final representative value, the error can be decreased to 2%. The result reflects the fact that the average operation can reduce the error significantly for the PSO optimal algorithm.
For the identification of the moment of inertia, the error in this method is higher than that of Dan and Chen, 16 while it is in accordance with the conclusion, in the same study, that the error changes with the cable force. However, as there is no standard explanation, we are unsure regarding the value that is relatively near to the real value. Further experimental studies for the moment of inertia identification are required.
Conclusions
The vibration method is a set of cable force detection methods that are supposed to be easy to use, low cost, and widely applicable to most cable-like structures. Due to the aforementioned factors, the quality of the cable force identification using the present methods is not satisfactory for practical use owing to its low precision and unneglectable errors. In certain exceptional cases, if not most, these methods are no longer applicable when the quality of the spectrum measured based on the cable vibration test is exceedingly poor.
To solve these problems, this study proposed a so-called PSO-based intelligent parameter identification technique. The primary characteristic of this intelligent optimal algorithm is the objective function, which is based on the frequency characteristic equation in the form of transverse dynamic stiffness. The frequency characteristic equation is a closed-form function, which considers the boundary conditions, bending stiffness, cable inclination, and sag. However, the order of mode, theoretically, is suitable for any length and any type of cables, especially for the parallel steel strands cable, whose mode frequencies and the corresponding mode orders are difficult to be determined.
The numerical case studies and the cable vibration test prove that the proposed method exhibits a high identification precision for tension force and an acceptable identification precision for moment of inertia for cables of any length. Compared to the existing methods, it possesses higher precision and lower requirements for frequency measurement. Moreover, the order of mode is not required, and there is no necessity to match the measured frequencies with the frequency calculated using the numerical model, e.g. FEM. Considering that the frequencies are the real mode frequencies of the cable, the quality of the identification result is relatively high, which is an exceptional feature of the proposed method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is funded by National Natural Science Foundation of China (51878490, 51508405), Science and Technology Commission of Shanghai Municipality (18DZ1201203, 17DZ1204300), and the Fundamental Research Funds for the Central Universities.