
Abstract
Tuned mass-high damping rubber damper (TM-HDR-D), as a high-efficiency damper, has great practical feasibility and good application prospect for cable vibration mitigation. To investigate the effect of TM-HDR-D on the cable dynamics, a refined model which considers the cable sag effect is established via complex modal method. Then, based on this model, the influence of cable sag and the stiffness, location, loss factor, and mass of the TM-HDR-D on the cable dynamics is systematically investigated. Meanwhile, the multi-mode damping effect of TM-HDR-D is also analyzed. Results show that TM-HDR-D can significantly increase the additional damping of the system. The cable sag only affects the first-order modal damping, and the effect of TM-HDR-D is significantly affected by its frequency, loss factor, and installation position. Improving the mass of the damper can improve the damping effect. Reasonable selection of damper tuning frequency can achieve multi-order modal damping enhancement.
Keywords
Introduction
Cable is composed of high-strength steel wire, which can withstand huge axial tension, and it has been widely used in the field of bridge engineering, such as the cable-stayed bridge, suspension bridge, and other types of cable-supported bridges. However, cables are extremely easy to be excited by environmental disturbances due to their light weight, high transverse flexibility, and low intrinsic damping.1–5 The long-term vibration of the cable may cause local fatigue damage, affecting the bridge safety and service life. Meanwhile, the large amplitude vibration of the cable can also cause a deep anxiety in the public. Therefore, it is necessary to control the vibration of the cables in the practical bridge engineering. Up to now, there are three types of countermeasures are frequently used for cable vibration mitigation in practice, including aerodynamic treatment of cable surfaces, installing dampers, and connecting cables via cross-ties.6–9 Among them, installing damper between the cable and bridge deck is the most commonly applied and effective measure in cable vibration control.
The purpose of installing the damper on the cable is to suppress the vibration by increasing the cable additional damping. In cable-stayed bridge engineering, many different types of dampers have been successfully used, such as oil damper,10,11 viscous-shear damper,7,12 high damping rubber (HDR) damper,13–15 friction damper,16,17 and magnetorheological (MR) damper.18–21 Although the damper performs a good vibration reduction effect, there are also many shortcomings in practical application. First of all, the installation of the damper generally requires a support, for this reason, the damper can only be installed near to the cable end. However, the damping contribution of the damper is proportional to its installation length; thus, the damper location limitation restricts the increase of the cable attainable damping.22–25 In additions, some damper defects occur after long-term use, for example, the oil damper has the problem of oil leakage, 26 and the friction damper causes the wear of friction plate.
Unlike the traditional cable mechanical dampers, the TMD-type dampers without damper support can be installed anywhere along the cable. 28 Meanwhile, since the installation position is not limited to the end of the cable, the additional damping provided by this kind damper will be greatly increased. In practice, tuned mass dampers (TMDs) were used in Øresund Bridge for the two longest cables vibration control. 27 Wu and Cai conducted a more in-depth study on the cable with a TMD-magnetorheological damper (TMD-MR) system.28–31 In their research, theoretical and experimental methods were used to explore the influence of TMD-MR on the dynamic characteristics of cable. Their study demonstrated the superiority of TMD for cable vibration control. Theory of a taut cable and a TMD-HDR damper system was explored in detail by Cu et al. 32 At the same time, they also carried out theoretical research on a taut cable with viscous damper and tuned mass damper system. 33 Di et al. conducted a full-scale cable test to study the reduction effect of the Stockbridge damper. 34 Recently, Di et al. proposed a strategy of using TMD to supplement the modal damping of the cable high-frequency vortex-induced vibration mode for suppressing this kind cable vibration. 35
In recent years, the span of cable-stayed bridges has continuously broken records, and the length of the cables is increasing as well, for example, the longest cable of Sutong Bridge is 577 m. 7 Due to the limitation of the damper installation height and the cable sag effect, the cable damper can no longer provide enough damping. 15 Therefore, in order to supplement the insufficiency of some order modal damping and overcome the limited installation of the damper support, the use of TMD-type damper control is a better choice. Moreover, considering the easy leakage of the actual liquid damper, the TM-HDR-D has a good application prospect. Therefore, on the basis of the previous research, the model of a cable with a TM-HDR-D system is established by considering cable sag via the complex modal method. Then, based on this model, the cable sag and the various parameters of the TM-HDR-D are analyzed in detail.
In this study, the model of the cable equipped with a TM-HDR-D is first established by taking cable sag into account. The influence of the cable sag effect as well as the parameters of TM-HDR-D on the cable modal damping is analyzed based on numerical solutions. Multi-mode damping effect of cable-TM-HDR-D system is also investigated. Finally, the paper concludes with a summary of this study.
Formulation of cable system with a tuned mass-high damping rubber damper (TM-HDR-D)
A shallow cable equipped with a TM-HDR-D is shown in Figure 1. The cable is fixed at two ends. A coordinate system is defined for cable with x starting from the left cable anchorage pointing rightwards along the cable, A shallow cable with a TM-HDR-D.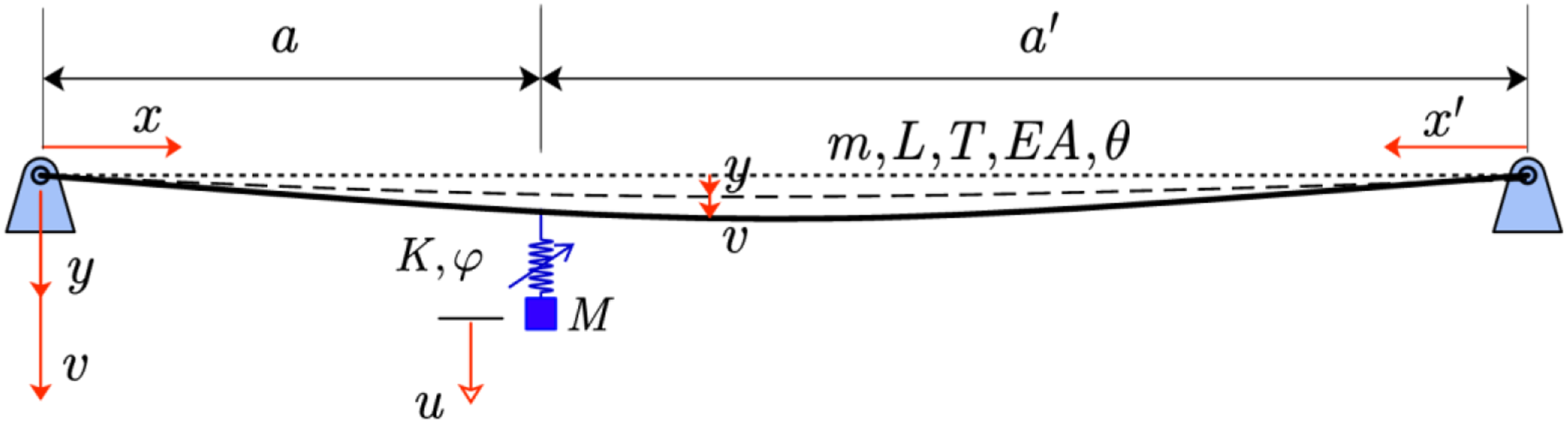
For the stay cable, its static state shape can be assumed to be a parabolic function

The governing equation of the cable-TM-HDR-D system motion can be expressed by the following partial differential equation, as
36

Under free vibration of cable, the displacement, cable additional horizontal tension and the damping force can be expressed as
36


The elastic deformation of cable under the action of additional horizontal tension has the following relationship

With

After introducing equation (6) into Equation (5), Equation (5) can be rewritten as

The internal force equilibrium at the point of TM-HDR-D can be written as

For the TM-HDR-D, its equilibrium equation is written as


Meanwhile, the damping force can be rewritten as

Using Equations (8) and (11), the characteristic equation of a shallow cable equipped with a TM-HDR-D is thus written as


Dynamic analysis of cable-TM-HDR-D system
To understand the effect of the TM-HDR-D on the cable vibration characteristics, the influence of cable sag and the stiffness, installation location, loss factor and mass of the TM-HDR-D on the cable dynamics is systematically investigates in this section.
Impact of cable sag effect
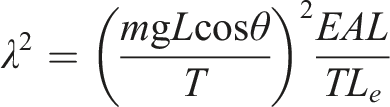
Figure 2 shows the effects of the cable sag on the first two modal damping ratios of the cable, where the curves correspond to the different installation positions of the TM-HDR-D. Note that, in the following analysis, the loss factor Modal damping ratio due to the influence of the cable sag (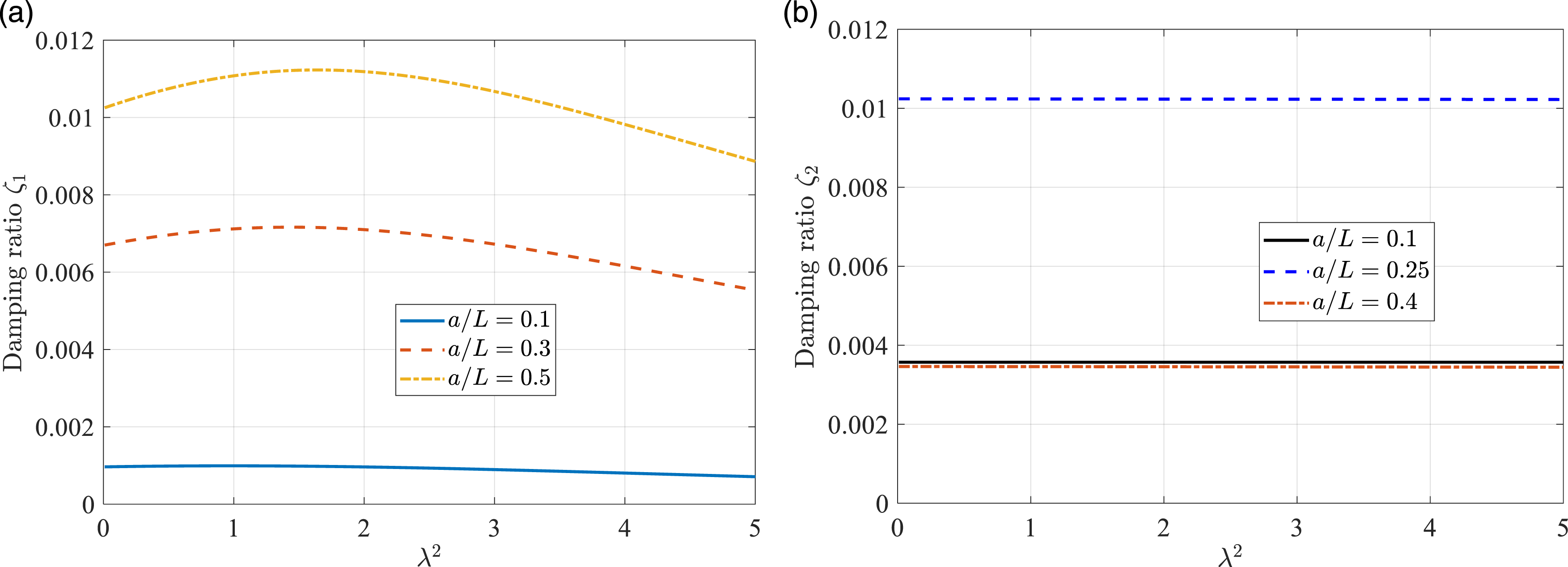
It can be seen from Figure 2, for the first mode, the effect of cable sag on the modal damping ratio is obvious, especially when the TM-HDR-D is installed at the middle of the cable span, that is,
Impact of frequency ratio (
) of TM-HDR-D
In this section, the effect of the frequency ratio ( Influence of frequency ratio 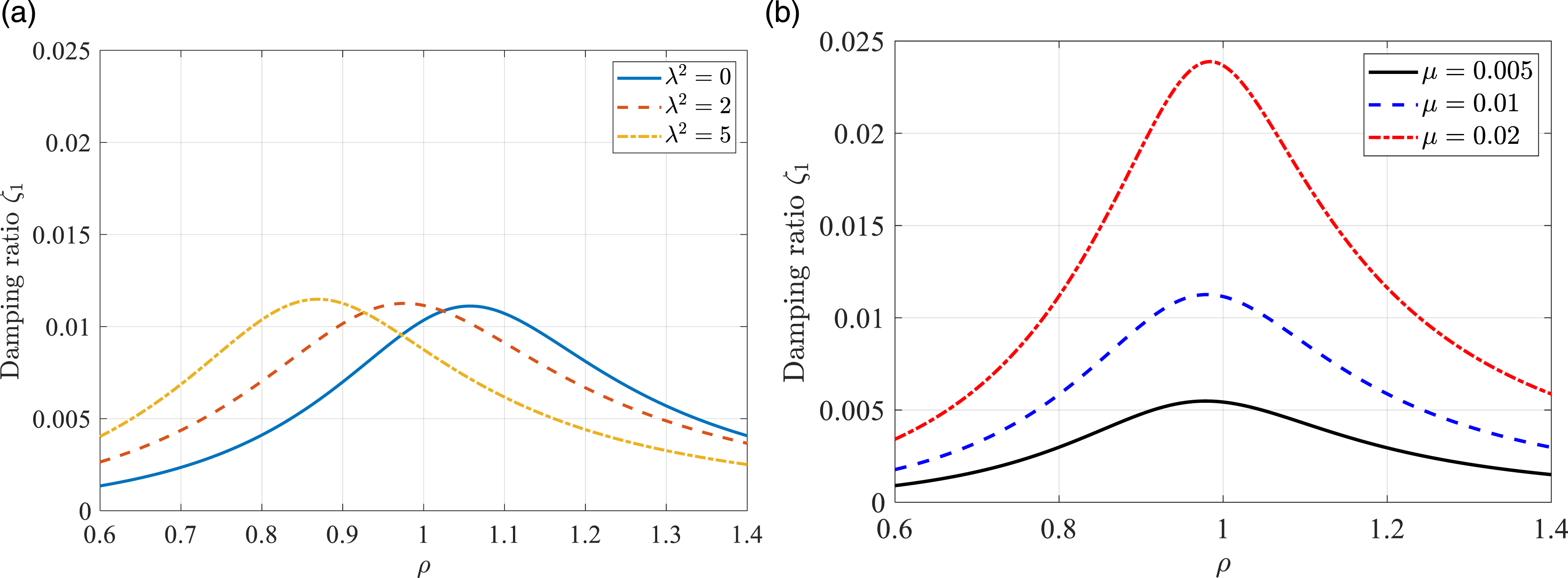
Figure 3 demonstrates that the TM-HDR-D is an absorber with high-frequency sensitivity, of which the damping effect is significantly reduced when the damper vibration frequency deviates from the optimal tuning frequency. For the first mode, cable sag reduces the optimal tuning frequency ratio, as illustrated in Figure 3(a). At the same time, this can also explain the phenomenon shown in Figure 2(a). Increasing the mass of the damper can significantly enhance the attainable modal damping ratio of the cable, and it is worth noting that the effect mass ratio
Impact of location (
) of TM-HDR-D
This section investigates the impact of the TM-HDR-D installation location on the cable modal damping ratio. Figure 4 shows the relationship between the installation position ( Influence of location 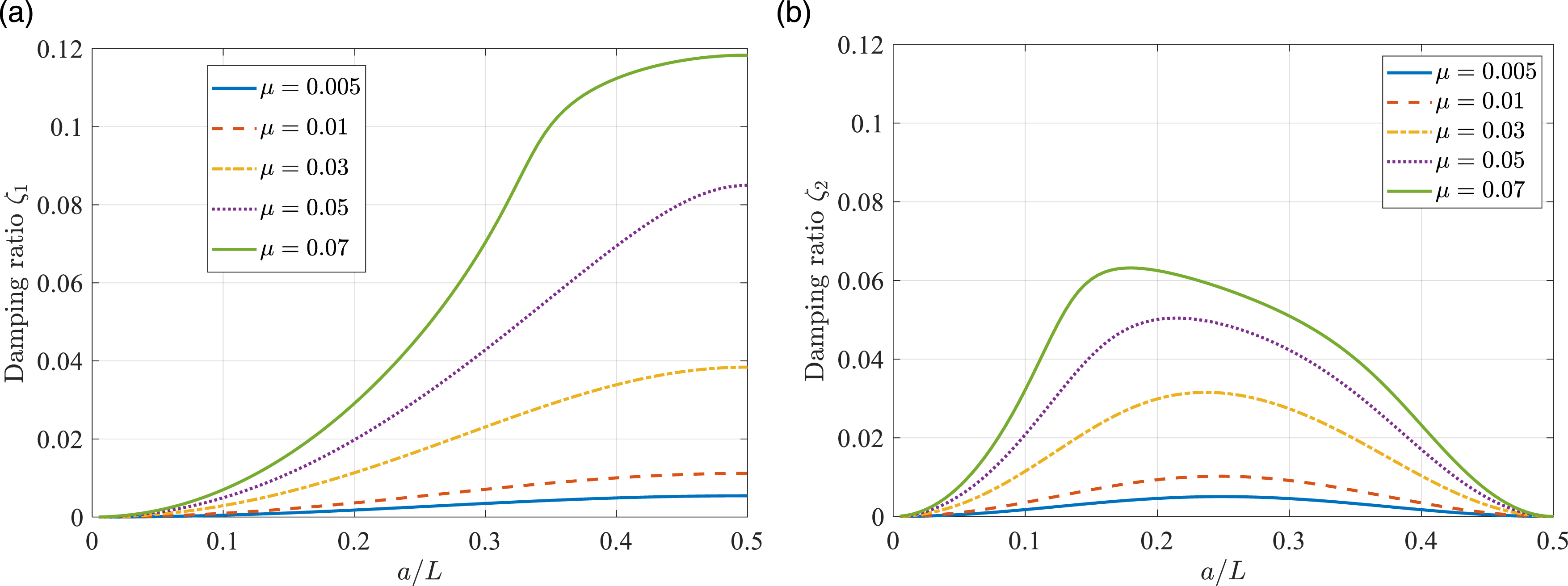
For the first mode, the closer the TM-HDR-D is installed to the midpoint of the cable, that is,
Impact of loss factor (
) of TM-HDR-D
The influence of loss factor Influence of loss factor 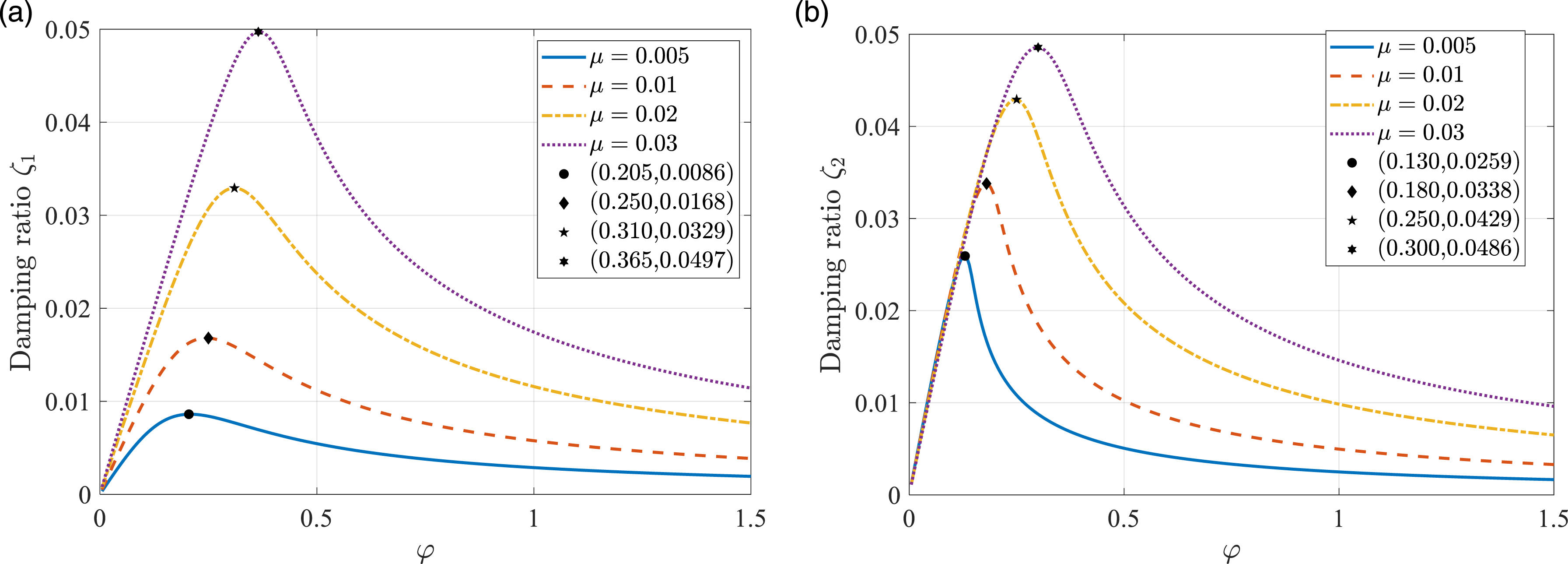
From Figure 5(a), it can be seen that there is a peak point in the damping curve, in other words, an optimal value of the loss factor can make the modal damping ratio reach the maximum value. As the TM-HDR-D mass increases, the optimal loss factor increases to a certain extent, for example, when mass ratio
Impact of mass (
) of TM-HDR-D
In this section, the influence of TM-HDR-D mass on its modal damping effect is analyzed. Figure 6 plots the modal damping ratio with respect to the mass ratio Influence of mass 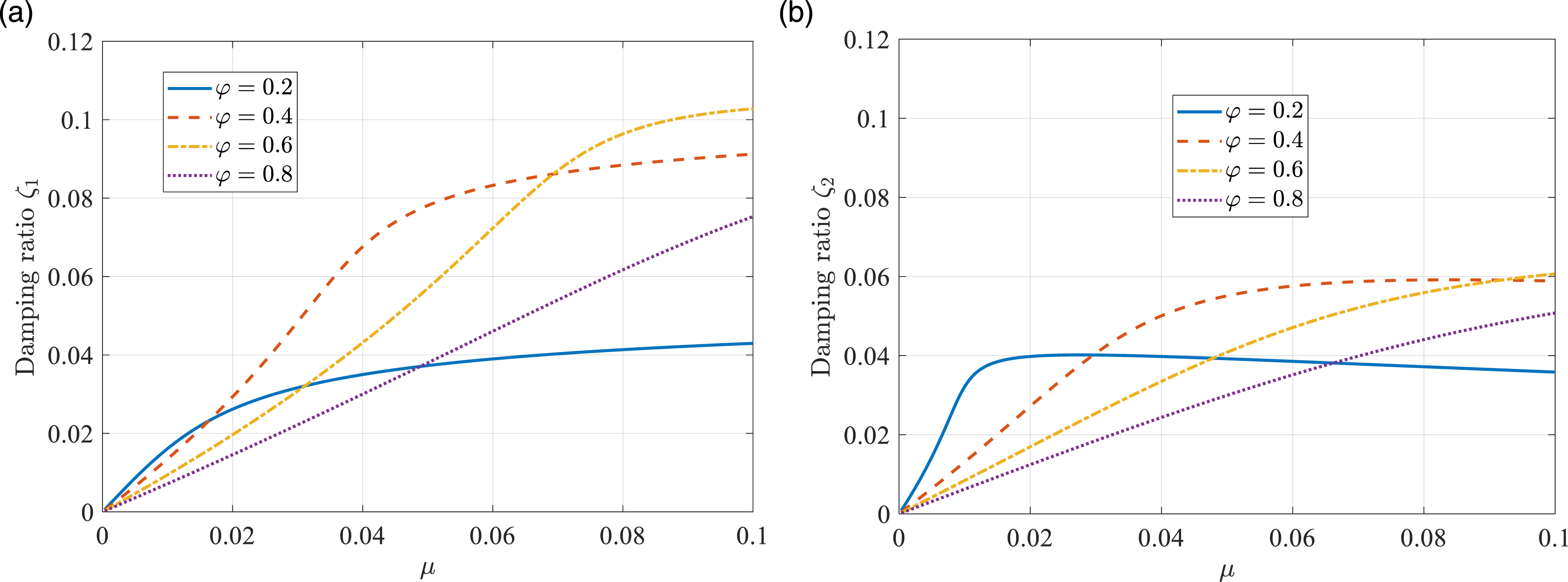
As depicted in Figure 6, the damping curve increases first and then tends to be stable. For the first mode, as shown in Figure 6(a), the damping curve with the smallest loss factor (
Multi-mode damping effect of cable-TM-HDR-D system
Design of TM-HDR-D
As demonstrated in previous studies, TMD or other tuned-type dampers have a high sensitivity to frequency, and this section thus discusses the damping effectiveness of TM-HDR-D in multiple modes. In the following analysis, the cable sag is Influence of frequency ratio Influence of frequency ratio 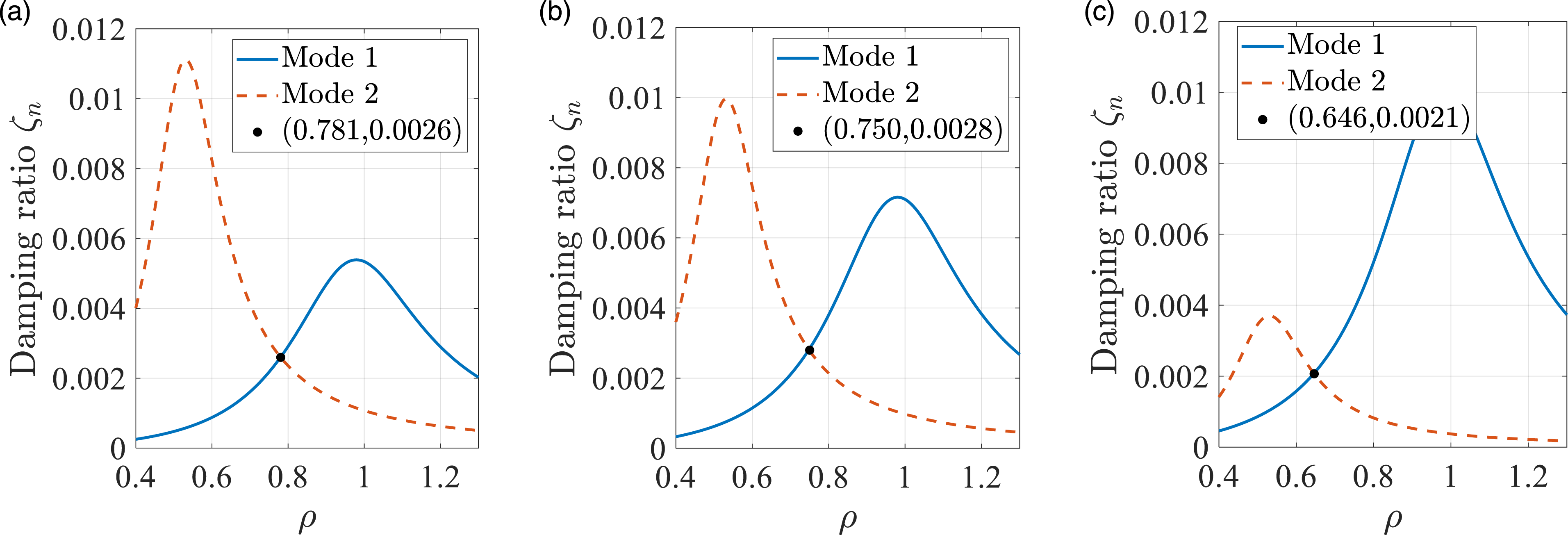
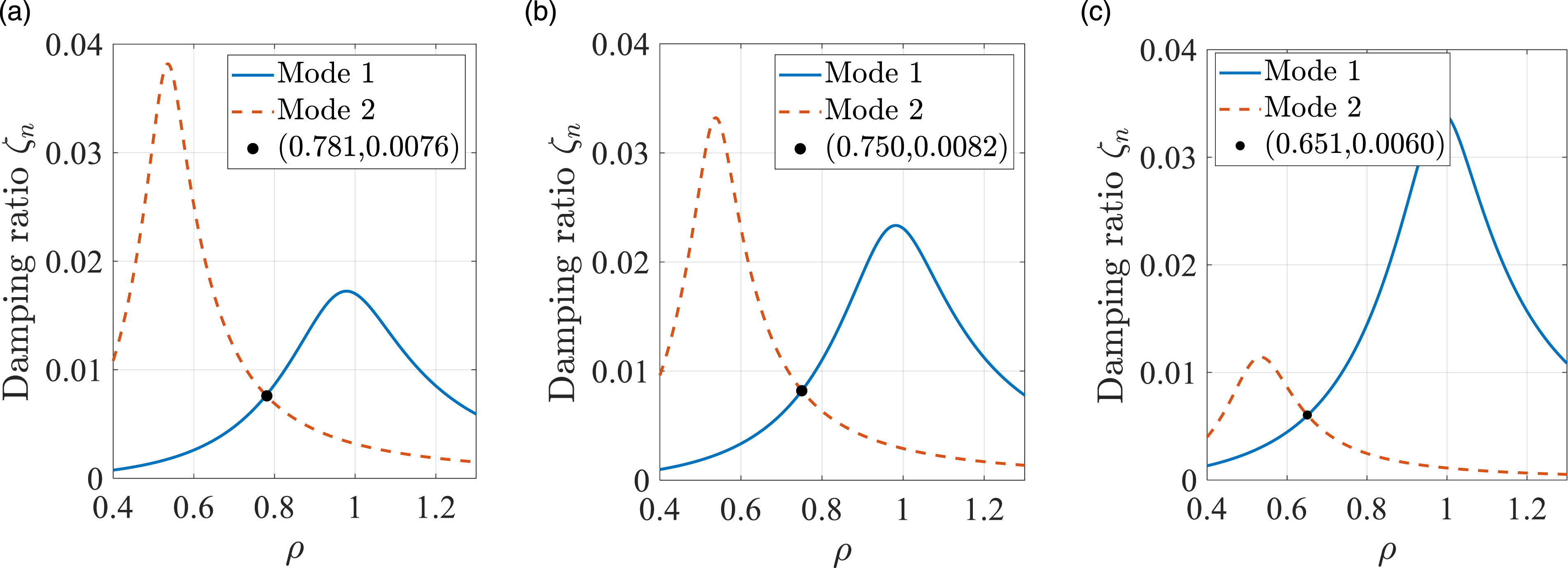
It can be found from the Figure 7 that the first modal damping curve reaches its peak when
Comparison of effects of different dampers
Parameters of cable for present study.

In the design, the first two cable modes are considered for optimizing of the dampers. In the following discussion, assume that the viscous damper or HDR damper is installed at 0.02 L. For the viscous damper, the optimal damping coefficient is 335 kN.s/m. For HDR damper, when the loss factor ( Comparison of damping effects of different vibration reduction measures.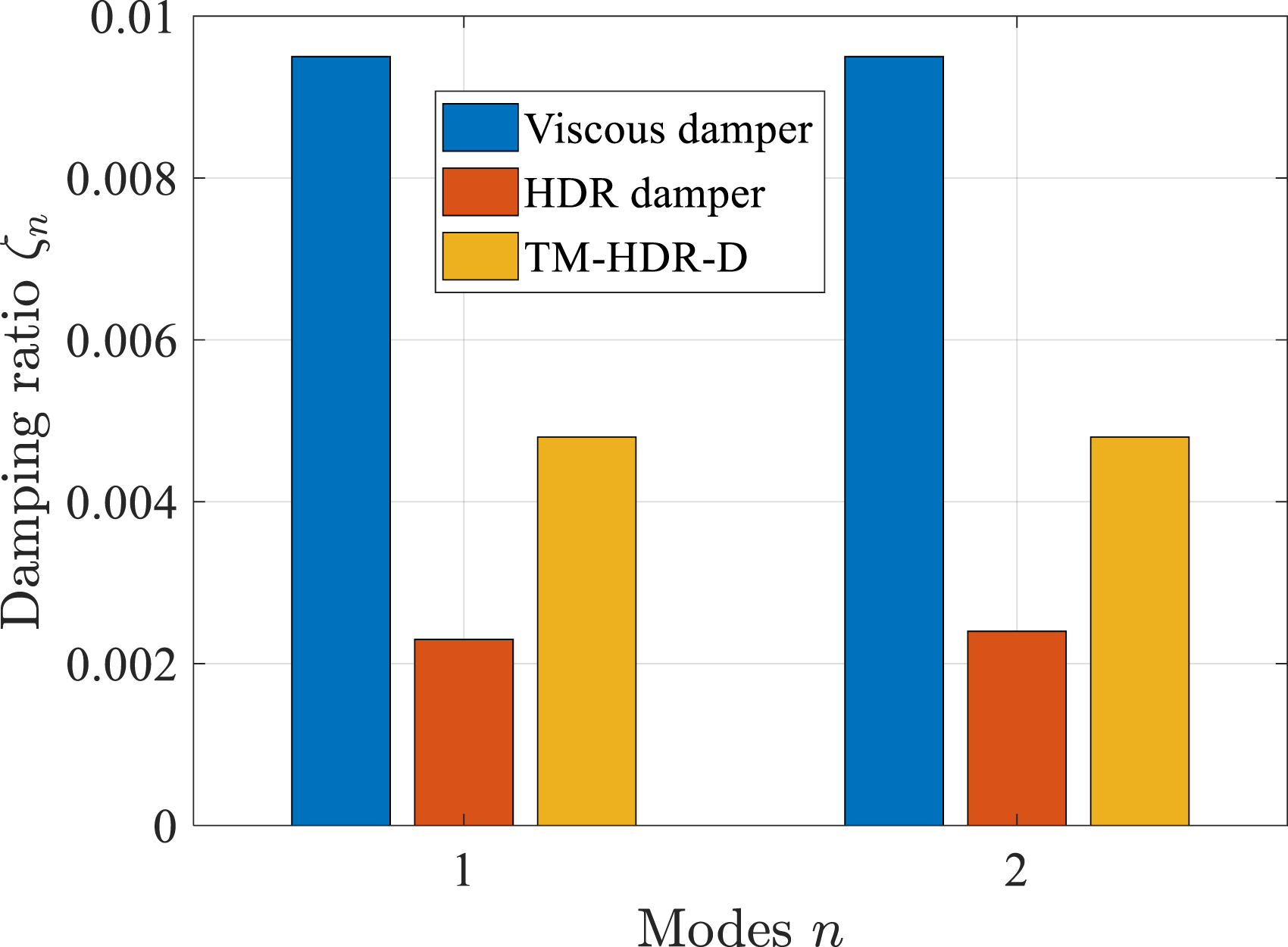
From Figure 9, it can be seen that, only from the perspective of lifting cable modal damping, the effect of TM-HDR-D is between the HDR damper and the viscous damper. The main reason is that TM-HDR-D is relatively sensitive to frequency, and the use of multiple TM-HDR-Ds can further improve its damping effect. However, in practical engineering, the installation of viscous dampers requires supports, and there is a problem of damping fluid leakage. Therefore, using TM-HDR-Ds or using TM-HDR-Ds and cable-end damper to control cable vibration in practical engineering has great advantages. In additions, Figure 10 shows the cable with a TM-HDR-D system mode shapes of the first two modes. It can be seen that the mode shapes did not change significantly after adding TM-HDR-D, due to the relatively small installation quality of TM-HDR-D. Mode shapes of cable system with (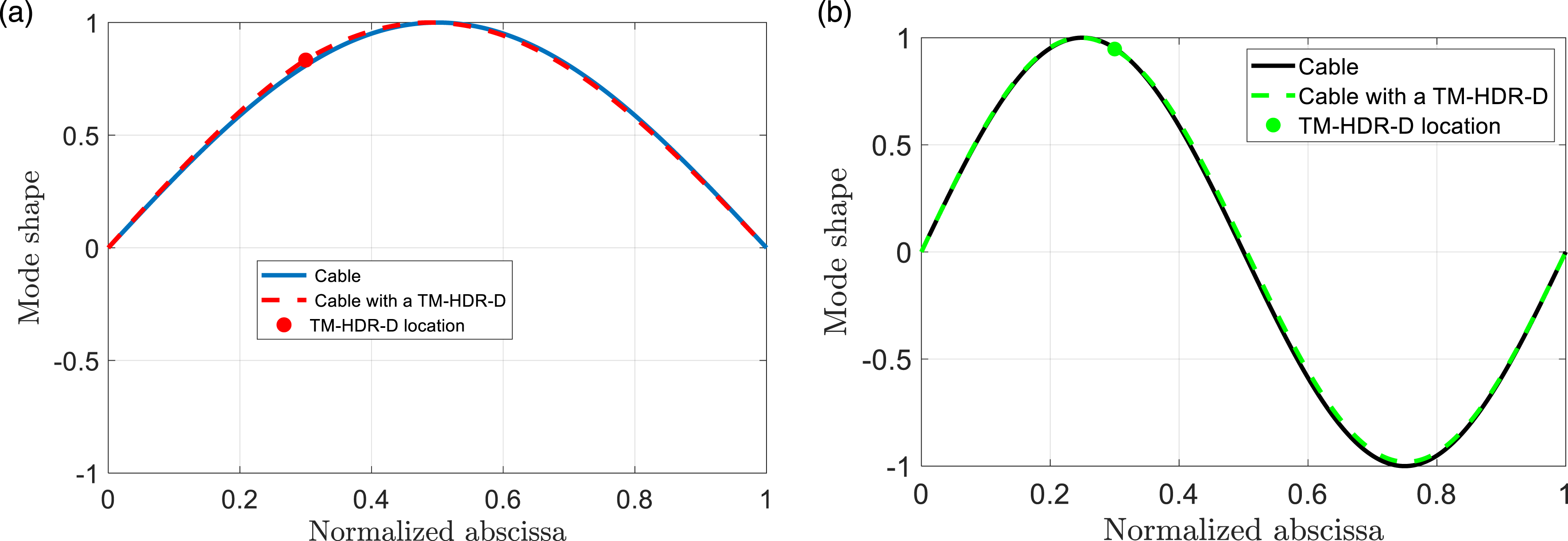
Conclusions
In this paper, a shallow cable with a TM-HDR-D system was studied in detail. Firstly, the refined model by taking the sag effect into account was established using the complex modal method. Then, the critical parameters of the system, including cable sag and the stiffness, installation location, loss factor and mass of the TM-HDR-D, are studied based on numerical solutions. Meanwhile, the damping effect of the TM-HDR-D on the first two modes of the cable is analyzed as well. The following conclusions can be drawn: (1) The cable sag only has a considerable influence on the first-order modal damping, and changes the damping effect of the TM-HDR-D mainly caused by changing the tuning frequency ratio (2) TM-HDR-D has a high-frequency sensitivity, and the sag will reduce the first-order tuning frequency ratio while the mass has little effect on the optimal frequency ratio; the modal damping is better when the TM-HDR-D is located at the place where the amplitude of the corresponding mode is larger; the modal damping is relatively sensitive to the loss factor of the TM-HDR-D, especially in the second cable mode; for a TM-HDR-D with a certain loss factor, there is the most suitable installation mass. (3) Due to the sensitivity of the TM-HDR-D to frequency, a single damper cannot achieve optimal damping for all concerned cable modes. However, it is possible for the modal damping of each mode to reach the target level by selecting the appropriate tuning frequency
Footnotes
Author Contributions
Z.Z. carried out the studies, participated in the derivation and drafted the manuscript. P.L. conceived of the study, and participated in its design and coordination and helped to draft the manuscript. C.L. carried out the numerical solution and participated in the design of the study. All authors read and approved the final manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data Availability Statement
All data, models, and codes to support the findings of this study are available from the corresponding author upon request.