
Abstract
It has been theoretically predicted that superior supplemental damping can be generated for a taut cable with an inertial mass damper. This paper extends previous studies to investigate the effect of the cable sag on the efficiency of an inertial mass damper. The general dynamic characteristics of an inclined sag cable with an inertial mass damper installed close to the cable end are theoretically investigated. The parametric analysis of the inertial mass and the damping coefficient of the inertial mass damper are conducted to evaluate the control performance of the cable with different sags. The results show that the inertial mass damper can alleviate the negative effect induced by the cable sag, and the cable sag can even increase modal damping ratios provided by the inertial mass damper. Sags of stay cables used in actual bridges only affect nearly symmetric vibrations of cables, while having little impact on nearly antisymmetric vibrations. The effect of cable sags will reduce the optimal damping coefficient and inertial mass of the inertial mass damper for the first symmetric mode of the cable.
Introduction
Cables, such as those used in cable-stayed bridges, are often susceptible to excessive vibrations due to their high flexibility and low inherent damping characteristics. 1 Large oscillations may reduce life spans of cables 2 and have detrimental effects on public confidence in the safety of bridges. Hence, mitigation of cable vibrations is critical. Transversely attached passive viscous dampers have been widely implemented in real applications. However, the supplemental damping induced by passive viscous dampers may be insufficient to eliminate vibrations effects of long-stay cables since the damper location is typically restricted to be close to the bridge deck for aesthetic and practical reasons.3–6
As a more efficient solution, semi-active control techniques have been proposed to provide superior damping to cables.7–15 Studies have shown that the negative stiffness of the semi-active damper can increase the damper motion and enhance its energy dissipation, thus improving the control performance of the damper.14,15 However, passive dampers are often preferred in full-scale applications due to their simplicity and reliability. In view of this, some efforts have also been attempted to seek innovative passive dampers with negative stiffness mechanism. 16 Theoretically and experimentally, passive negative stiffness dampers (NSDs), including the magnetic NSD 16 and the pre-stressed springs NSD,17,18 have been proved to be capable of providing supplemental damping to cables that is superior to traditional passive dampers.
As an emerging type of passive dampers, inertial mass dampers (IMDs) have attracted extensive attention from the community since their properties are similar to NSDs.19–25 Recently, the superior mitigation performance of typical IMDs, such as the viscous IMD21–23 and the tuned inerter damper,24,25 have been theoretically investigated and demonstrated through an ideal taut-cable model. However, the taut-cable model neglects the effects of cable sag and inclination that are known to have negative influence on the control performance of passive dampers.26–29 For example, Xu and Yu 29 illustrated that the first symmetric modal damping ratio of a 442.6-m-long stay cable with a passive viscous damper was reduced by about 38%, compared to that predicted by a taut-cable model without sag effect.
This paper extends the aforementioned works to evaluate the effects of cable sag on the control performance of an IMD. The dynamic characteristics of an inclined sag cable with an IMD installed close to the cable end are theoretically investigated with respect to various sags of a cable and different inertial masses of an IMD. The control performance of an IMD is seen to be better than a passive viscous damper for inclined sag cables in cable-stayed bridges. The negative effect induced by cable sag can be alleviated by the IMD, and the cable sag even helps to increase modal damping ratios of stay cables.
Formulation of the sag cable-IMD system
Taking into account the cable sag and the inclination, the equation of motion of the cable-IMD system shown in Figure 1 can be expressed as
28

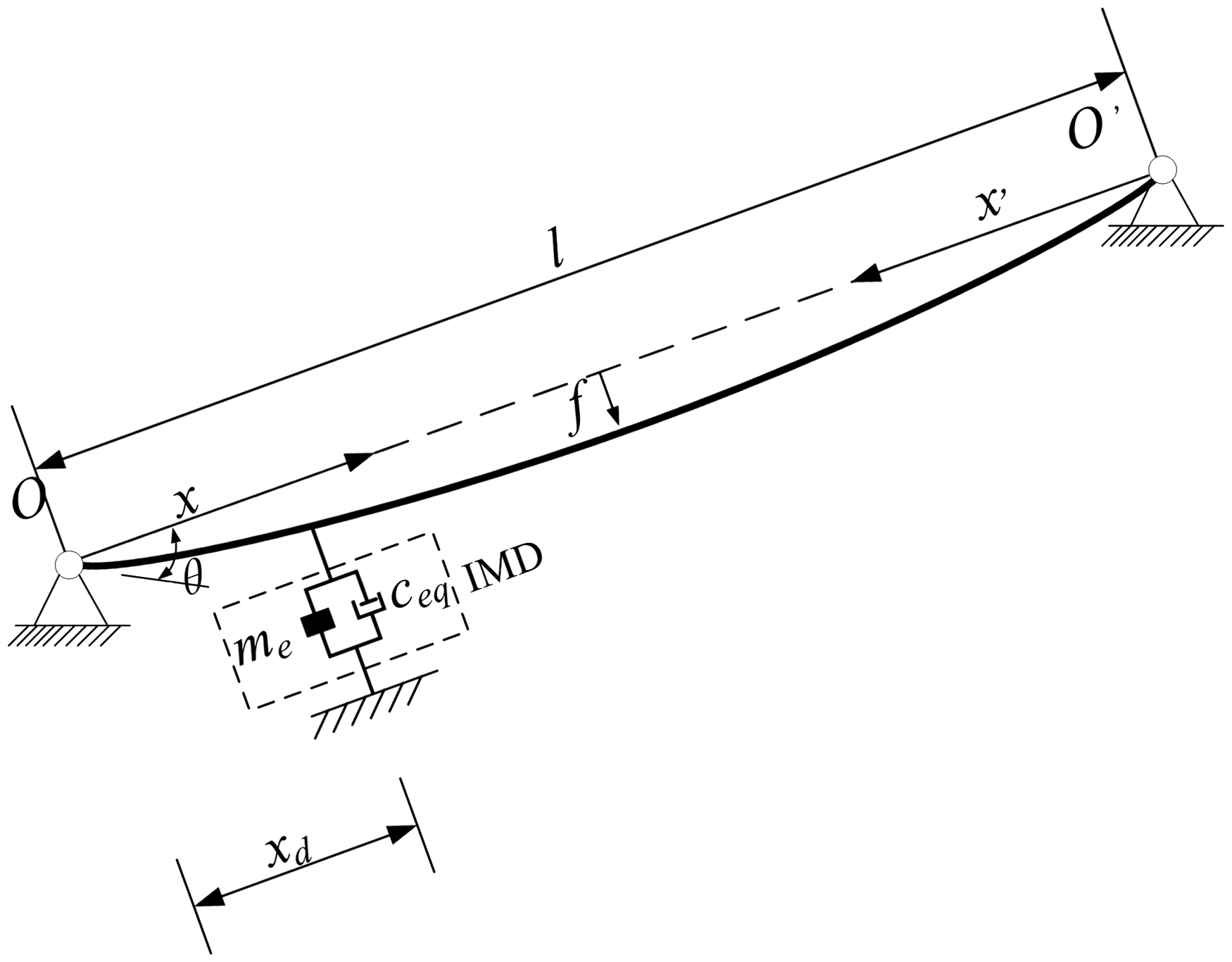
Inclined sag cable-IMD system. IMD: inertial mass damper.
T0 is the tension force along the chord OO’,
T is the additional tension force due to cable vibration,
y0(x, t) is static profile of the cable,
y(x, t) is the cable vibration around its static profile y0(x, t),
m is the cable mass per unit length,
δ(x-xd) specifying the location of the damper force at x=xd is the Dirac delta function, which is zero everywhere except at the x = xd, where it is infinity,
FIMD is the damper force of an IMD with the expression as
20

The additional tension force T of the cable can be expressed as
30


For flat-sag cables investigated in this study, sag f can be expressed as
30

Introducing sag-extensibility parameter λ
2
defined as
30


For free vibrations of the cable, the cable vibration, the additional cable tension force, and the IMD force can be respectively expressed as

By introducing the corresponding wave number β

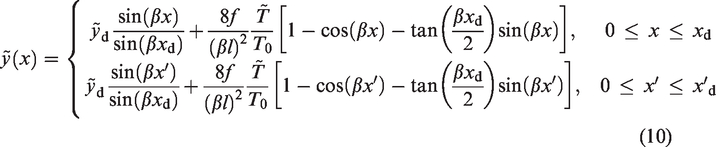
Substituting equation (10) into equation (3), we can obtain
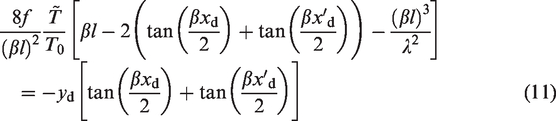
Substituting equation (10) into the force equilibrium condition at the IMD location


The wave numbers of free vibration are determined from the condition that the homogeneous equations (11) and (13) permit non-trivial solutions for

Nearly symmetric vibrations
The wave numbers in equation (14) have two sets of branches. One is for the nearly symmetric solutions and the other is for the nearly antisymmetric solutions. The nearly symmetric vibrations are associated with the second factor in equation (14). Dividing sin(βl/2) on both sides of equation (14) to remove the roots associated with the nearly antisymmetric modes, the wave numbers determinant equation of nearly symmetric vibrations is derived as
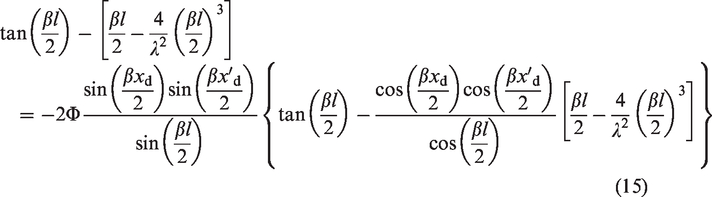

Using the trigonometric relation



Then, the equation solving for tan(βl/2) is derived as

The solution is obtained from equation (20) by substituting the most recent estimate of βl into the right-hand side of the equation and obtaining the updated value from the left-hand side of the equation. The iteration process starts from undamped wave numbers

The solution is found on the branch of the tangent function, where

On this basis, the iterative scheme is given by
After solving wave numbers βn, the eigen-frequency ωn can be calculated by equation (9). The eigen-frequency related to the modal damping ratio is expressed as
5

Therefore, the nth modal damping ratio

The normalized modal frequency

The damping coefficient

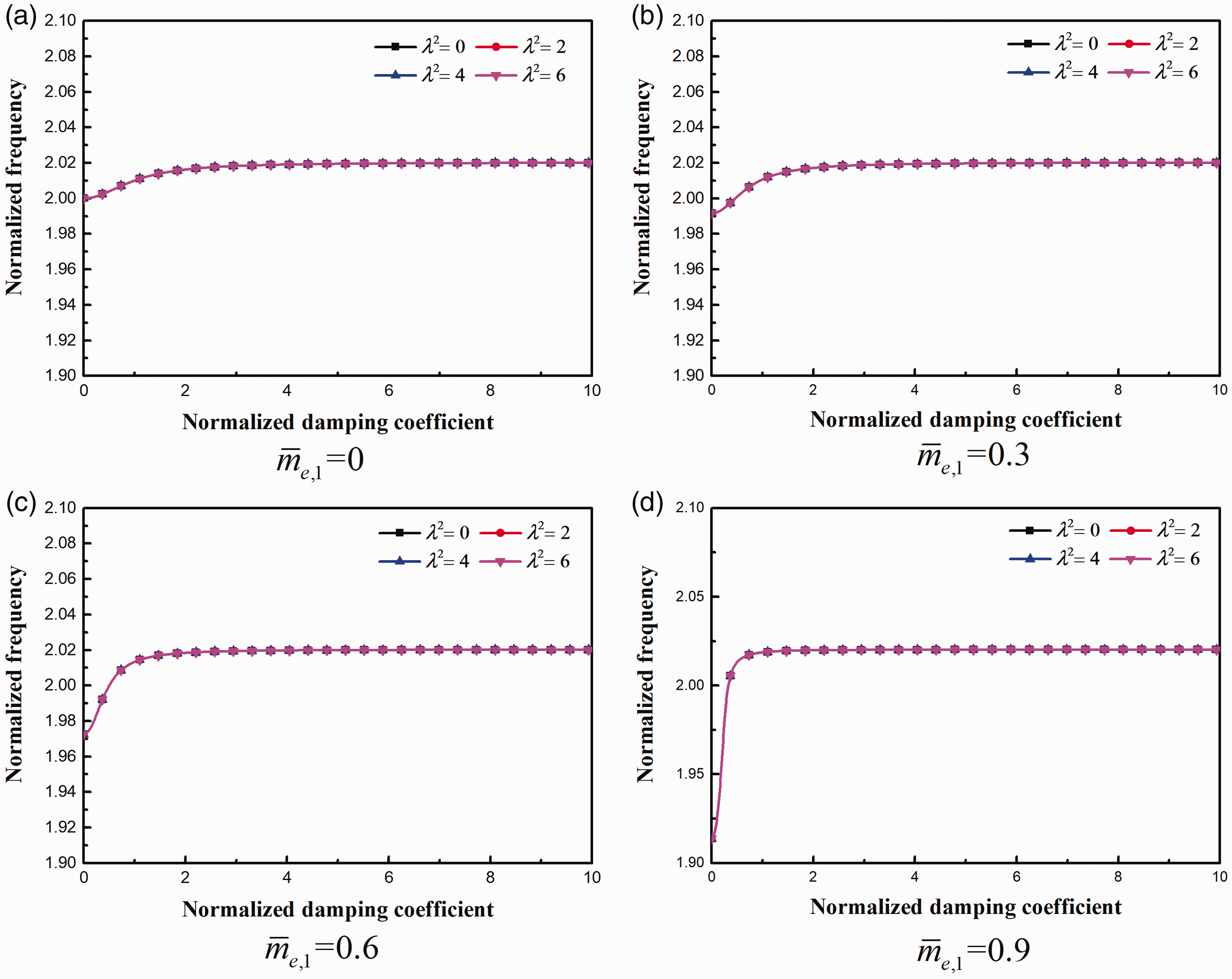
Figure 2 shows normalized frequency variations of the cable in the first symmetric mode with the increase of damping coefficient for various sags and inertial masses. The natural frequencies of the cable in the first symmetric mode increases with the increase of cable sag. As damping coefficient of the IMD increases, the cable frequencies vary slightly and eventually remain relatively constant over the range of xd/l. Generally, the inertial mass of the IMD can slightly decrease the frequency of the cable with/without sag. However, the IMD with the inertial mass shown in Figure 2(d) can increase the frequency of the cable with sag.
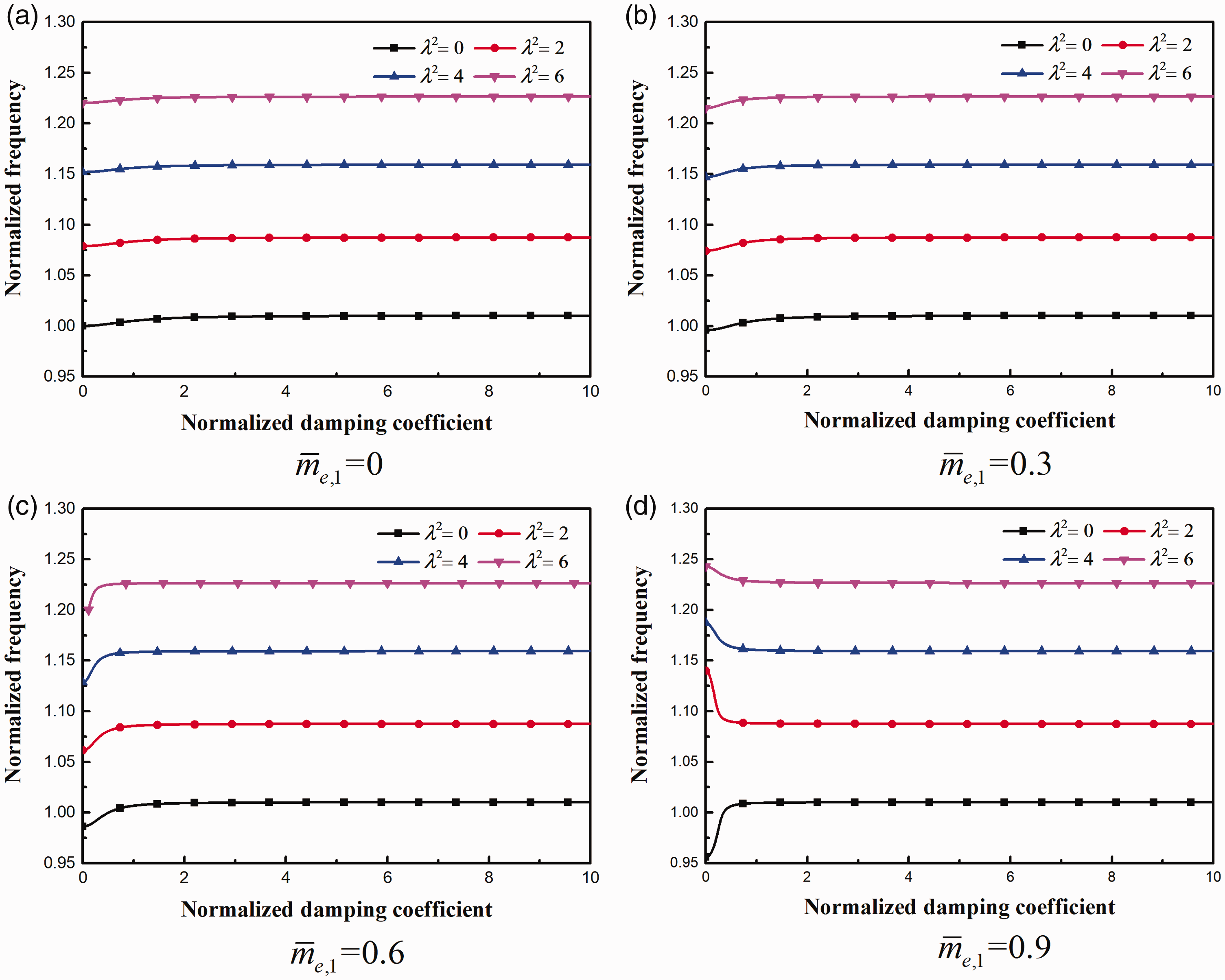
Variations of the normalized natural frequencies in the first nearly symmetric mode with the increase of damping coefficient for various cable sags and inertial masses (xd/l = 0.01).
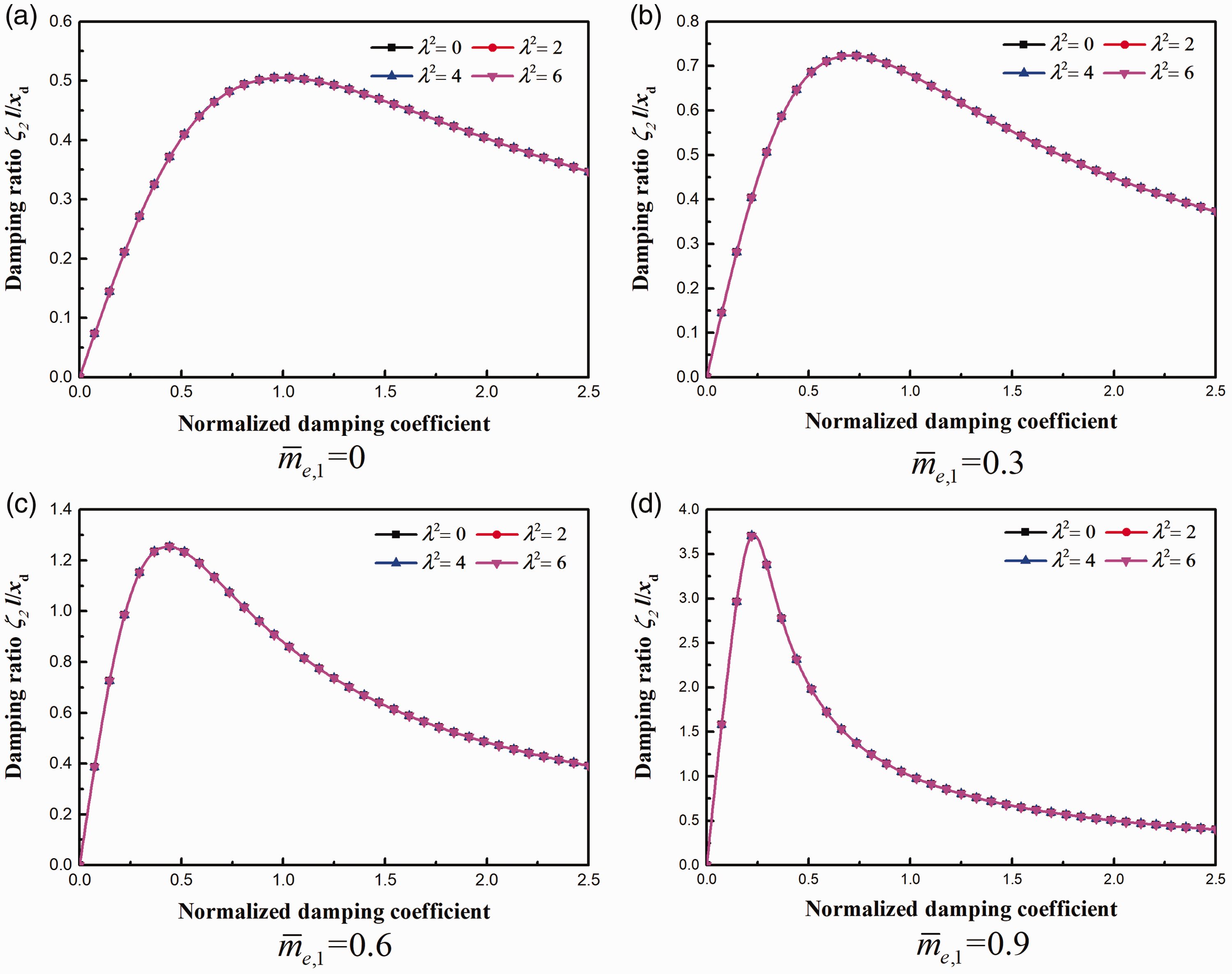
Figure 3 presents modal damping ratios of the cable in the first symmetric mode with the increase of damping coefficient for various sags and inertial masses. The peak of each curve in Figure 3 suggests the optimal modal damping ratio of the cable and corresponding damping coefficient of the IMD. As the cable sag or the inertial mass of the IMD increases, the optimal damping coefficient of the IMD decreases, substantially. For passive viscous damper shown in Figure 3(a) and the IMD with small inertial mass shown in Figure 3(b), the cable sag generally lowers the optimal modal damping ratios. However, the achievable optimal modal damping ratios begin to increase with the increase of cable sag when medium inertial mass shown in Figure 3(c) is adopted.
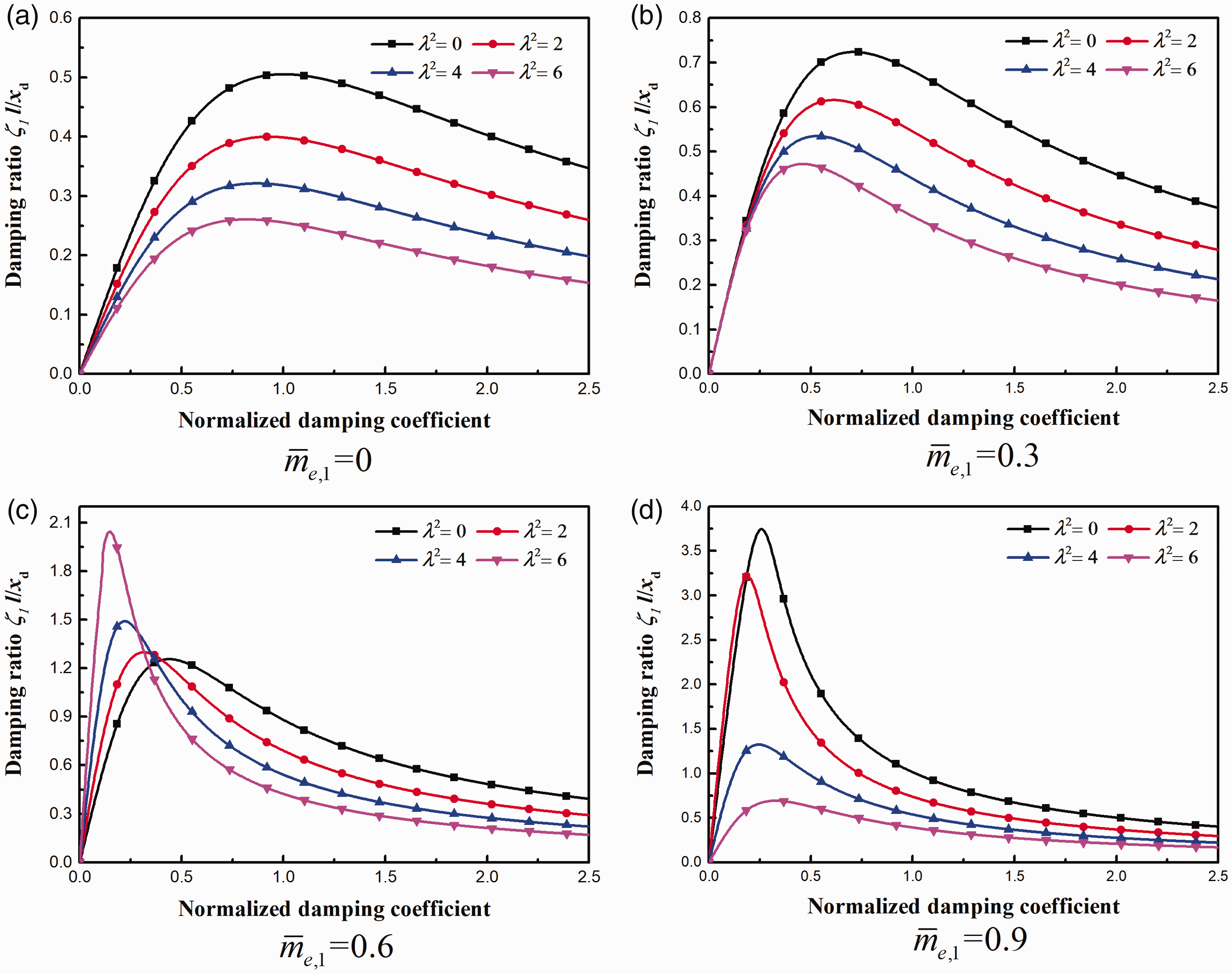
The normalized modal damping ratios of a sag cable in the first nearly symmetric mode with the increase of damping coefficient for various cable sags and inertial masses (xd/l = 0.01).
The negative stiffness k of the IMD corresponding to the nth mode of the cable can be expressed as

and the optimal negative stiffness

Equations (28) and (29) indicate that the frequency increment due to the sag will decrease the optimal inertial mass of the IMD or increase the negative stiffness for a given inertial mass.
In addition, when the IMD uses the inertial mass shown in Figure 3(d), the cable sag can make the negative stiffness induced by the inertial mass exceed the optimum value, causing the supplemental modal damping ratio of the cable to decrease. It implies that the optimal inertial mass of an IMD for a sag cable is smaller than that for a taut cable.
The effects of cable sag on the control performance of an IMD can be clearly seen in Figure 4, which gives the variations of the maximum modal damping ratios of a sag cable in the first nearly symmetric mode with the increase of cable sag. As expected, the IMD can provide more damping to the cable than a passive viscous damper. For the IMD with small inertial mass (
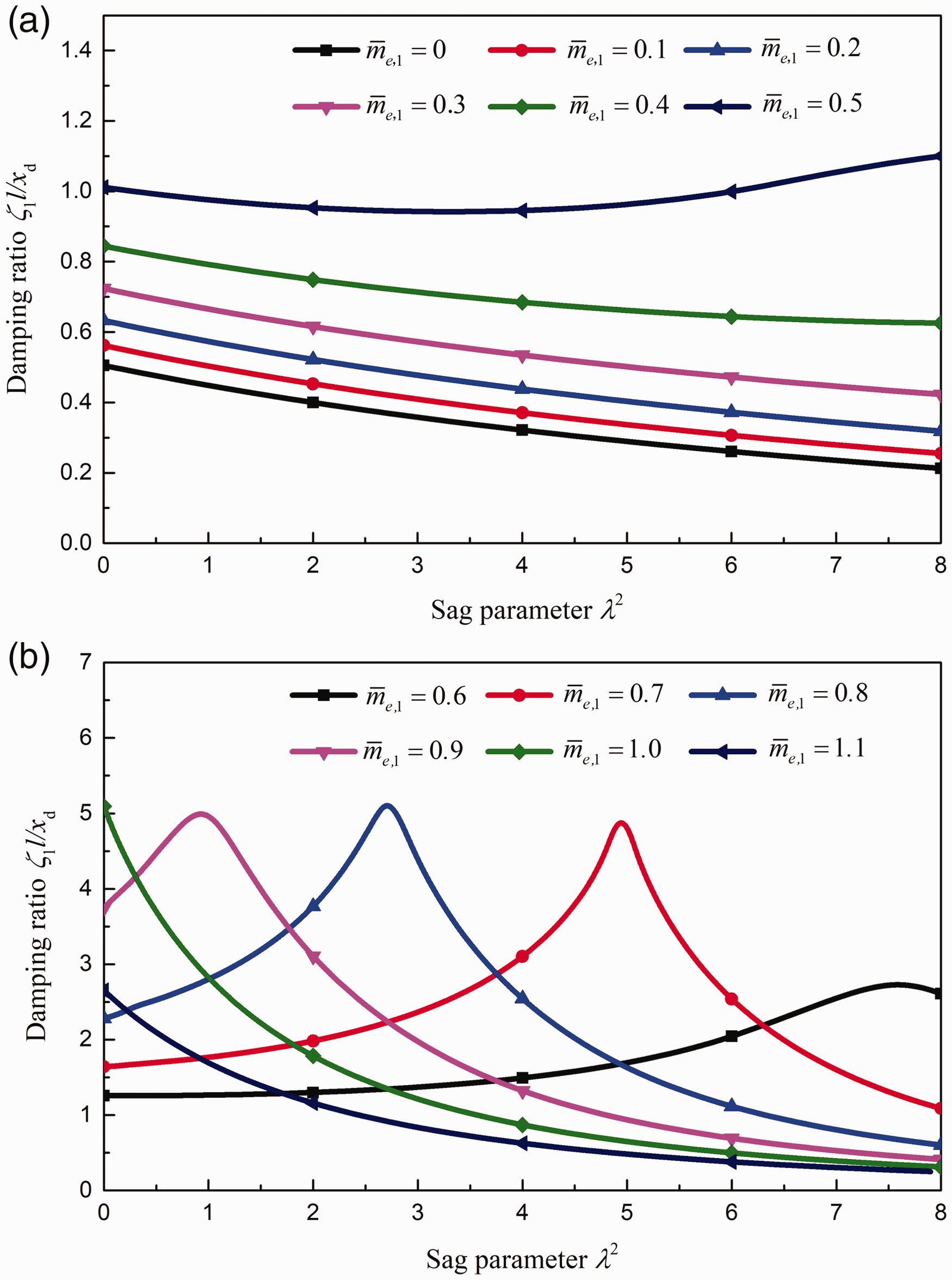
The maximum modal damping ratios of a sag cable in the first nearly symmetric mode with the increase of cable sag for various inertial masses (xd/l = 0.01).
The effect of cable sag on the efficiency of the IMD can be explained by comparing mode shapes of the cable. Figure 5 shows mode shapes in the first nearly symmetric mode of a sag cable with an IMD based on the equations (11) and (13). The amplitude of the mode shape at the damper location reflects the motion amplitude of the damper. Increasing this value can effectively enhance the energy dissipation of the damper and thus achieve superior control performance. 16 As can be seen in Figure 5(a) and (b), the amplitude of the mode shape at the damper location decreases with the increase of the cable sag, which indicates that the modal damping ratio provided by the damper decreases with the increase of the cable sag. As for the IMD with medium inertial mass shown in Figure 5(c), the cable sag can increase the mode-shape amplitude at the damper location and provide more damping to the cable. However, when the inertial mass of the IMD is adopted as shown in Figure 5(d), the mode-shape amplitude at the damper location may decrease with the increase of cable sag. As a result, mitigation performance of the cable with the IMD begins to reduce.
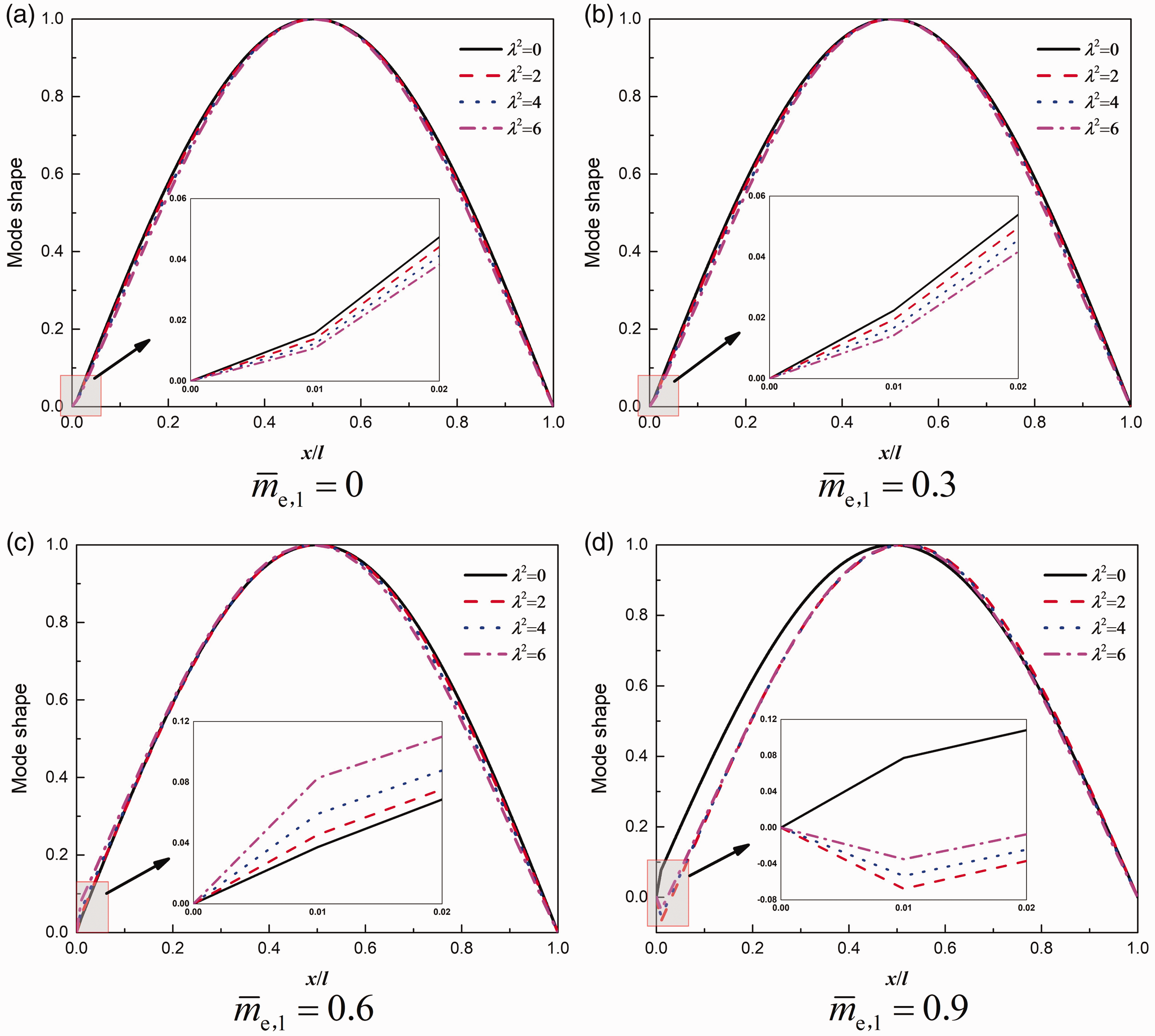
The mode shapes of a sag cable with an IMD in the first symmetric mode (xd/l = 0.01). IMD: inertial mass damper.
Nearly antisymmetric vibrations
By dividing cos(βl/2) on both sides of equation (14), the wave numbers determinant equation of nearly antisymmetric vibrations is derived as


The solution is obtained from equation (30) by substituting the most recent estimate of βl into the right-hand side and then using the equation to calculate an improved value. The iteration process is started from the undamped wave numbers27,28

The solution is found on the branch of the tangent function, where

On this basis, the iterative scheme is given by

After solving the wave numbers βn, the modal damping ratio can be easily obtained according to equation (25).
The variations of normalized natural frequencies, modal damping ratios, and mode shapes of the cable in the first antisymmetric mode with the increase of normalized damping coefficients of the IMD are shown in Figures 6 to 8, respectively. Unlike the results in the first symmetric mode, frequencies, damping ratios and mode shapes of the cable in the first antisymmetric mode are hardly affected by the cable sag. This is consistent with previous studies on the effect of the sag on dynamic characteristics of a cable with a passive viscous damper.26,27 The modal damping ratios and the displacement amplitude of the damper both increase with the increase of the inertial mass of the IMD. The maximum modal damping ratios in the first antisymmetric mode induced by the IMD are equal to those predicted by a taut-cable model without sag effect.
Variations of the normalized natural frequencies in the first antisymmetric mode with the increase of damping coefficient for various cable sags and inertial masses (xd/l = 0.01).
The normalized modal damping ratio of a sag cable in the first antisymmetric mode with the increase of damping coefficient various cable sags and inertial masses (xd/l = 0.01).
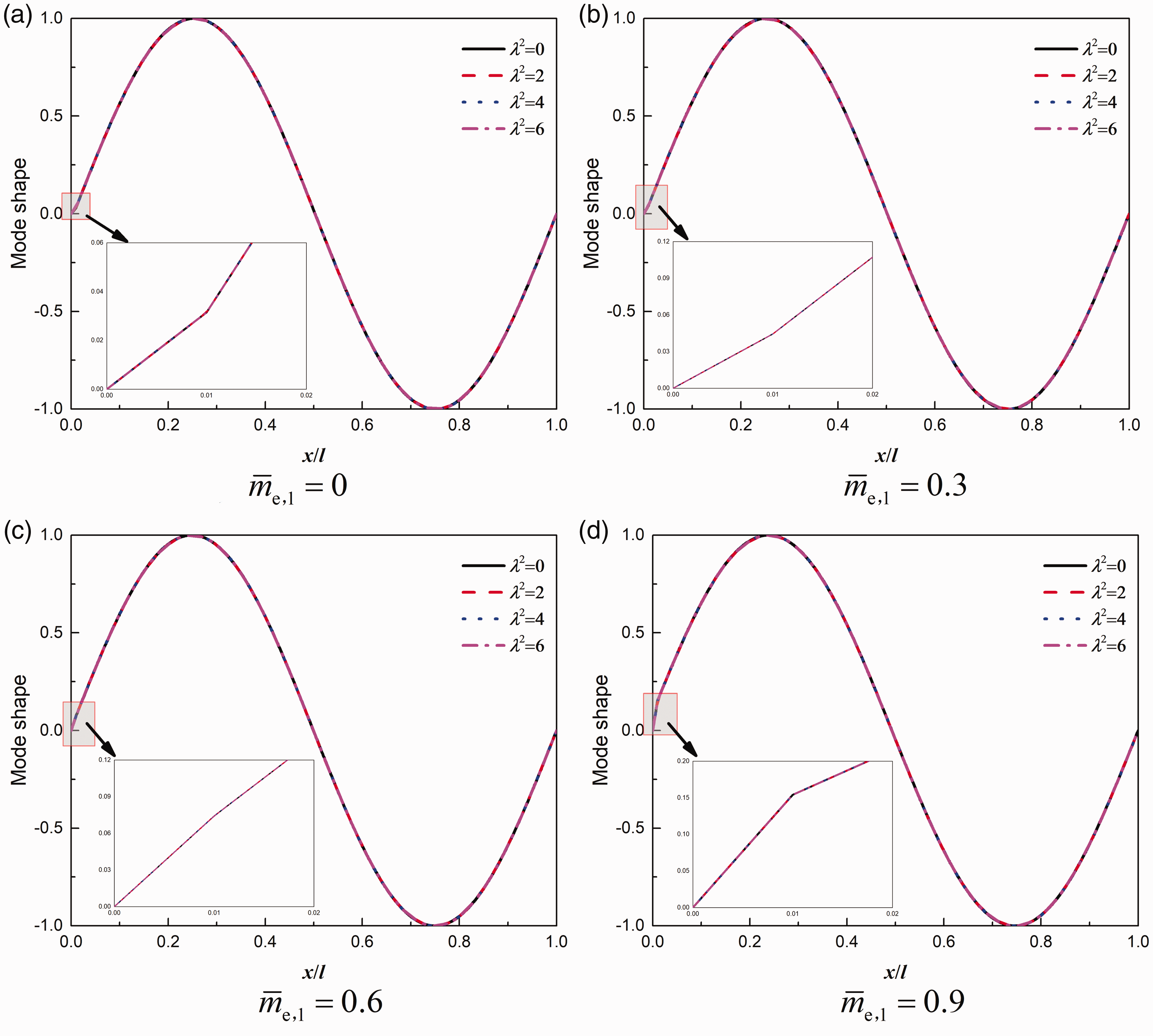
The mode shapes of a sag cable with an IMD in the first antisymmetric mode (xd/l = 0.01). IMD: inertial mass damper.
Conclusions
This study investigates dynamic characteristics of an inclined sag cable with an IMD installed close to the cable end. Parametric analyses are conducted to evaluate the effects of cable sag on the mitigation efficiency of the IMD. The main conclusions of this study are summarized as follows:
The sag increases the nearly symmetric vibration frequencies of a cable, and decreases the optimal damping coefficients and the inertial mass of the IMD. Similar to a cable with a passive viscous damper, the cable sag has little effect on frequencies, modal damping ratios, and mode shapes of nearly antisymmetric modes of the cable with the IMD. For a cable with a passive viscous damper, cable sag will decrease the modal displacement amplitude of the cable at the location of the damper. However, medium inertial mass of the IMD helps to amplify the modal displacement amplitude of the cable at the location of the IMD, which indicates that the IMD may alleviate the negative effect induced by the cable sag. When the benefits brought by the inertial mass are more than the negative effects induced by the cable sag, cable sag can even help to increase modal damping ratios of the cable.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The National Natural Science Foundation of China (Grant No. 51308214 and 51778228) and National Basic Research Program of China (973 Program) (Grant No. 2015CB057702).