
Abstract
People use trains as a means of transportation to travel to various nearby and distant destinations, resulting in an increasing amount of time spent inside such vehicles. Consequently, railway transportation sectors are focusing significantly more on enhancing passengers’ demand and level of satisfaction, including but not limited to high-speed travel, safety, and riding comfort. This paper provides a state-of-the-art review of available solutions for reducing undesired vibrations that have a substantial impact on improving the critical velocity limits of trains, maintaining the quality of riding comfort, and resolving safety concerns. In this regard, the solutions proposed for train vibration control are divided into two main categories: direct and indirect solutions. The direct solutions are those methods that are applied directly to trains’ bodies or bogies to attenuate the undesired vibrations, for example, improving the suspension/damper system, implementing active/semi-active control strategies, or applying various carriage optimization design modifications. Indirect solutions, on the other hand, are those that could indirectly affect trains’ vibrations, for example, controlling vibrations in railway bridge structures during train passages. Since the identification of vibration characteristics is assumed to be the first step in choosing proper solutions, particularly for active or semi-active control implementations, this review has examined the literature pertinent to modal identification of trains and railway infrastructures. Additionally, despite the installation of dampers between the bogie and suspension, the train’s equation of motion, and consequently, the vibration control of the bogie, has relied on the sky-hook model for decades. The fundamental problem for systems whose control strategies are based on the sky-hook concept is that the ‘sky’ does not actually exist. A solution to solve the sky-hook logic issue is using tuned rotatory inertia dampers and active rotatory inertia drivers which is addressed in this paper as well. Finally, it is concluded that these three solutions – employing a suspension/damper system in the bogie, an elastic connection for the train’s under-chassis-suspended equipment, and a ballastless railway – can practically mitigate vibration and noise in a train.
Introduction
People utilize trains as a mode of transportation to travel to various nearby and distant destinations; hence they spend several hours inside these vehicles. In order to save time or rest during their travels, they additionally prefer to board a train with a higher speed and better ride comfort. Therefore, the railway transportation industry has always tried to achieve higher velocity, more riding comfort, and higher levels of safety. Moreover, such industries have continuously recorded vibrations inside and on the bodies of trains in terms of acceleration, velocity, displacement, and interior noise (sound) and have attempted to attenuate them using a variety of solutions.
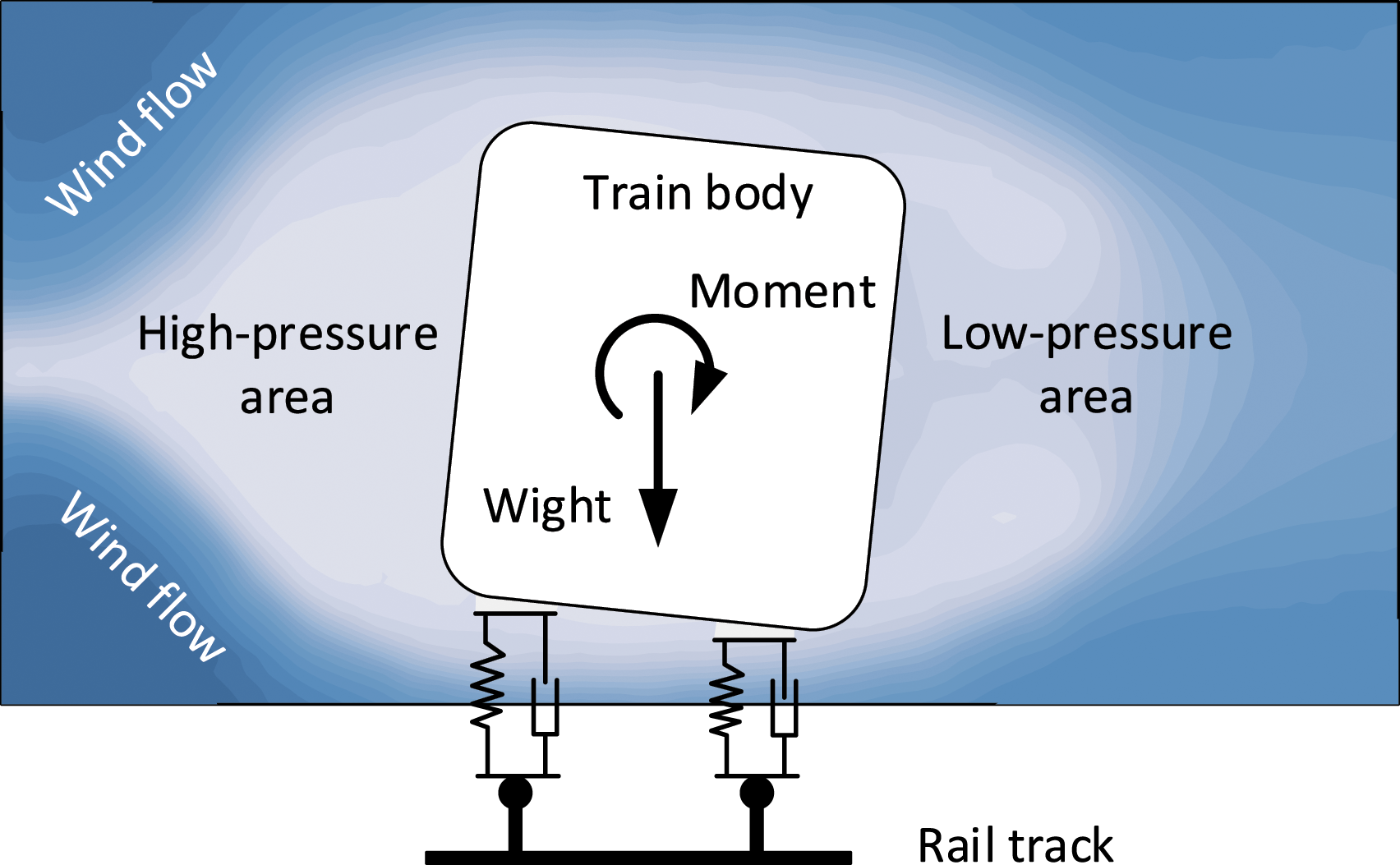
The relevant literature demonstrates that the unwanted train vibration causes various problems affecting the critical speed, ride comfort and safety of the high-speed train (HST). Some instances of these problems, along with their main causes and effects, are shown schematically in Figure 1. Figures 2 and 3 depict instances of the impact of wind and rail irregularities on a train. Passengers prevent the train from maintaining a certain mass distribution, even between stations. Therefore, passengers can be considered as a live load whose mass distribution can vary at any time in HSTs. Hence, due to the varying parameters associated with passengers, winds, and rail irregularities, the train’s dynamic behaviour is always subject to nonlinear uncertainties. In this respect, noises recorded using microphones near bogies or inside car bodies can merely have effects on ride comfort quality. The unwanted vibrations caused by rail irregularities and winds can decrease ride comfort quality, safety level and critical speed. Therefore, the primary concern of the examined literature is how to attenuate the undesirable train vibration. Main sources of train vibration, problems caused by these vibrations, and their impacts. A schematic depiction of the influence of wind on a train. A schematic depiction of the influence of rail irregularities on a train.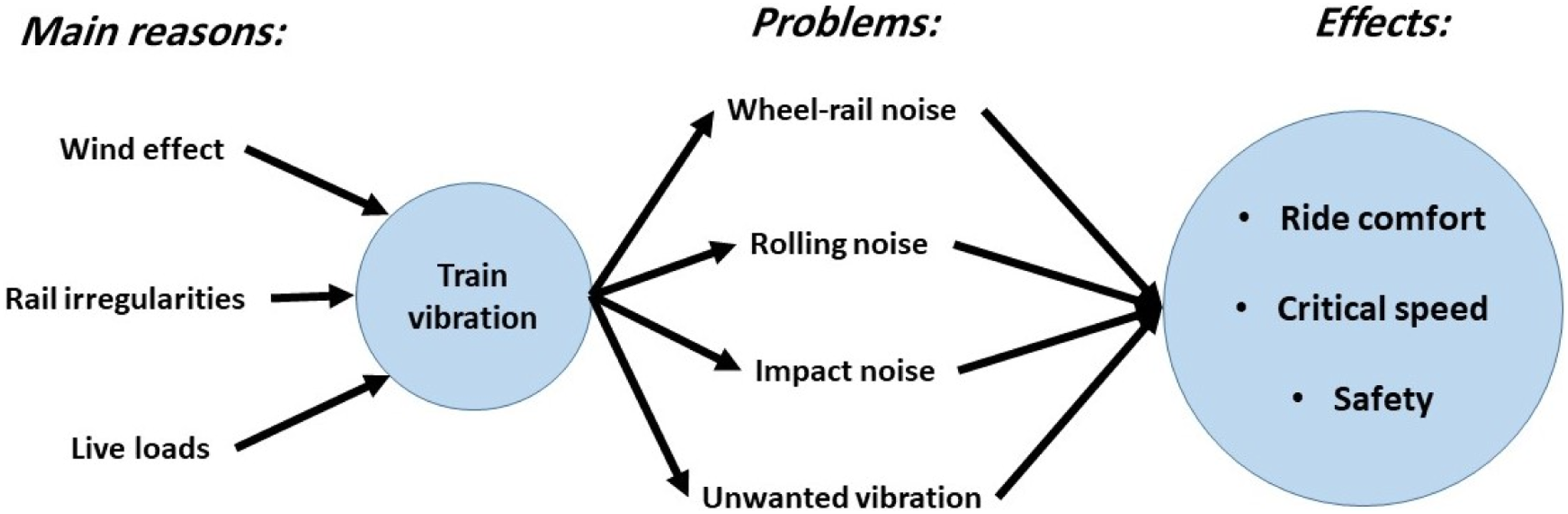

The main purpose of this review paper is to address available solutions around HST vibration control problems cited in the related literature as illustrated in Figure 4. To this end, solutions are generally divided into two main categories: direct and indirect solutions. The direct solutions are those directly applied to the train body (e.g. improving the suspension/damper system or even making changes in car body design). The indirect ones are those aimed at improving rail structures to reduce train vibrations by providing better situations in track and rail structures, such as improvements in ballastless track or using a proper damper in railway bridges. The emphasis is placed on train vibration suppression using suspension/damper systems. Since the identification of train vibration is the first step to choose a proper solution, the literature related to modal identification of train vibration was reviewed and addressed in the subsequent sub-section. It is of note that the authors had no claim of reviewing all related studies, and there were also missed ones, which were not accessible at the time of writing this paper. Solutions addressed in this paper to reduce trains’ vibrations.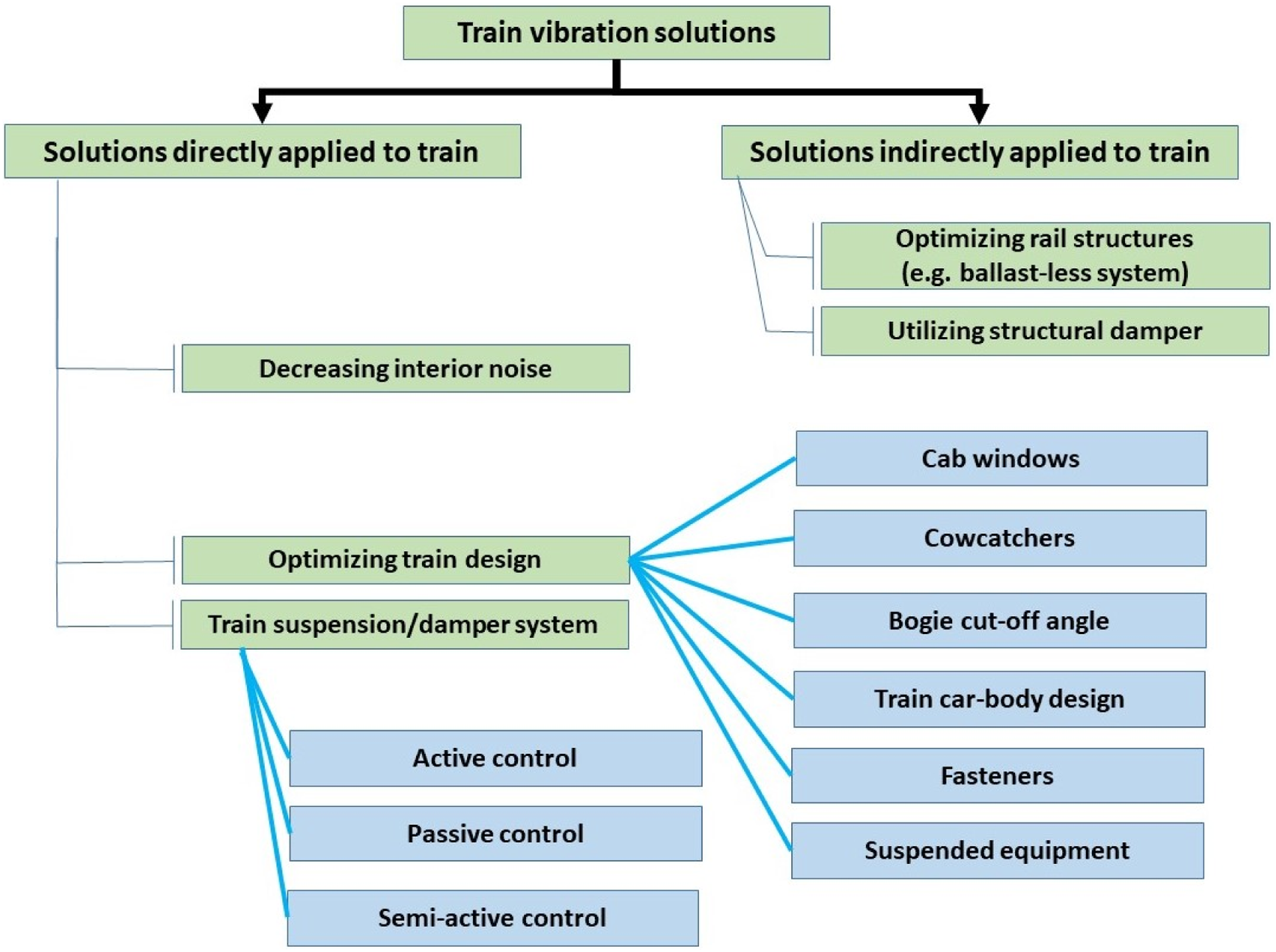
Issues directly related to train’s vibration control
Train design and modal identification
Identification of excitation loads as well as dynamic modal parameters of HSTs is of utmost importance and also critical for selecting proper solutions for train vibration suppression. In this regard, environmental conditions such as windy, snowy or rainy weather can directly influence train ride comfort quality, levels of safety, and operational performance. In this line, Baker 1 studied and reviewed the effects of still-wind and crosswind on different parts of HSTs. Although this author did not consider trains inside tunnels, he concluded that wind flows could make noises around trains, and an optimum train design could thus decrease such noises, especially in cab windows and cowcatchers. Sun et al. 2 also studied different designs of cab windows and cowcatchers and consequently suggested an optimum design to minimize noise induced by wind flows. Their suggested design merely provided numerical evidence. In this regard, Zhang et al. 3 shed light on the influence of bogie cutout angle on the aerodynamic performance of HSTs and proposed a new model that could reduce drag by 2.92%. Additionally, Wang et al. 4 numerically addressed the bogie effect on slipstream and wake in HSTs and proved that the bogie could cause turbulence, leading to oscillation. Moreover, the bogie cutouts forced airflow toward outlets of the bogie, which caused accumulated snow in snowy periods. Likewise, Wang et al. 5 examined this snow accumulation and pointed out that such accumulation on the top surface of bogies decreased following a rise in the running speed of HSTs, while the quality of snow packing on the main elements of bogies was significantly augmented. They also concluded that the bogie could have better performance when there is no snow. They also reiterated that the higher the speed, the more the snow accumulated on the bogie. However, increasing snow accumulation was limited to a velocity of 250 km/h. To improve the safety level of bogie, especially in rainy and snowy weather, Zhao et al. 6 correspondingly investigated the mechanism of wheel-polygonal wear of HSTs and found that braking in snowy or rainy weather could lead to wheel slide along rails. They further established an experimentally validated numerical model based on frictional self-excited vibration to analyse this sliding and reported that damping of fasteners could have a great effect on frictional self-excited vibration. Therefore, increased damping of the fasteners could effectively suppress wheel-polygonal wear.
The use of light vehicle bodies in HST has attracted wide attention over the past two decades because of their advantages in reducing transportation costs, increasing speed, and attenuating noise. However, due to the decrease in weight, their bending natural frequency is reduced to less than 10 Hz, resulting in an increase in the vertical vibration. Further discussions about the advantages and disadvantages of light vehicle bodies can be found in.7–12 To overcome the disadvantages of using lightweight materials in car bodies, the most practical solution is to employ effective suspension/dampers, as illustrated in Section 2.2. Moreover, changing the design and materials can also be a viable practical solution, especially if it increases the bending natural frequency by more than 10 Hz.
Reducing bogie vibration has been a considerable subject in designing bogies. For example, Liu and Jin 13 developed a three-dimensional (3D) numerical model of the bogie and studied the influence of material and structural parameters on the attenuation of bogie vibration at a high frequency (over 500 Hz). They then optimized the design of the numerically modelled bogie with some suggestions, such as changing stiffness in some parts. Besides, Zhai et al. 14 measured acceleration data from real HSTs, investigated vibration characteristics of the acceleration data of the car body, bogie frame, and axle for 2 months, and found that ballastless railway led to lower vibration and higher ride comfort quality. They also concluded that the natural frequency of suspension is about 1 Hz, and that it is about 10 Hz and 34 Hz for car body and wheel perimeter-induced forced vibration, respectively. Therefore, the car body can be dominated by low-frequency vibration.
Under-chassis-suspended equipment can potentially affect the natural frequency of the car’s body. Dumitriu
15
examined this effect on the vertical vibration behaviour of the HST car body. Gong et al.
16
also proposed a numerical method to consider the effect of such suspended equipment on the car body of HSTs and verified it using real data from such trains. Overall, they concluded that the suspended equipment could be effective and change the first natural frequency of HSTs. Later on, Sun et al.
17
compared the dynamic vibration absorber (DVA) theory and vibration isolation theory and concluded that under-chassis-suspended equipment designed based on DVA could have better effects on the car’s natural frequency. They also claimed that using DVA theory for designing the equipment raises the level of under-chassis-suspended equipment vibration. Separating the vertical and lateral stiffness of the under-chassis-suspended equipment, Sun et al.
18
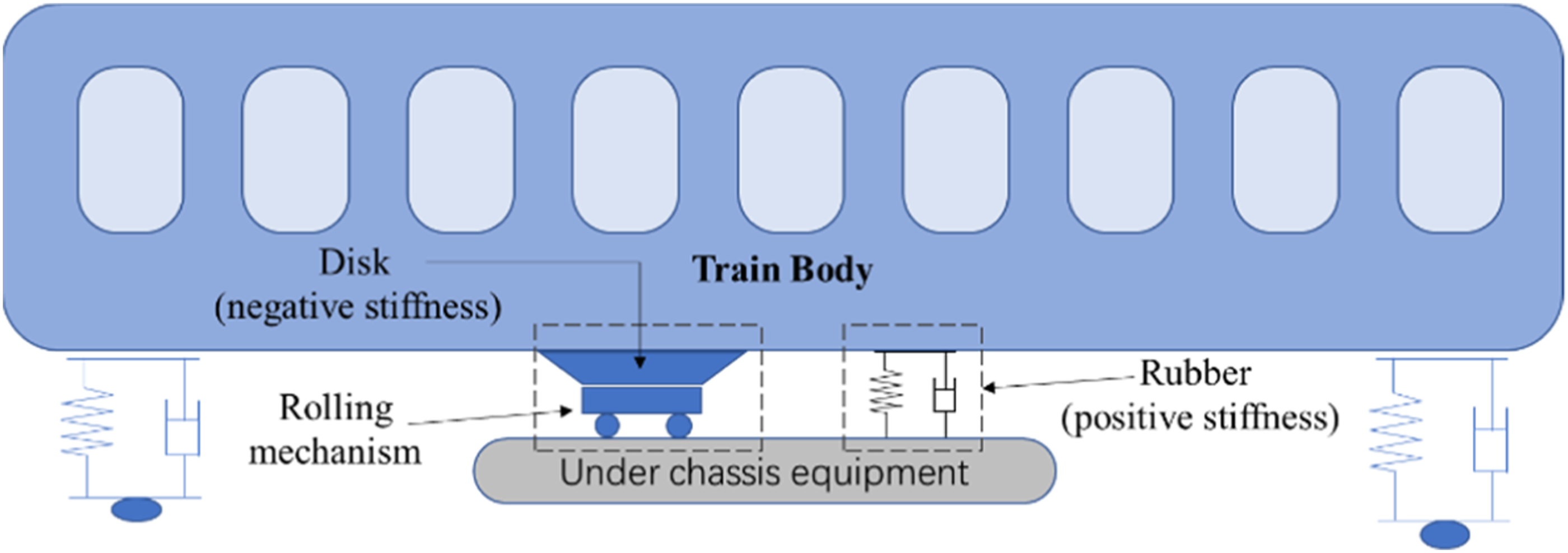
proposed a new vibration absorber based on the negative stiffness of a disk spring in parallel with the rubber component. They numerically confirmed that using the suggested vibration absorber could decrease the elastic vibration of the car body and increase the ride quality of the vehicle. According to Gong et al.
19
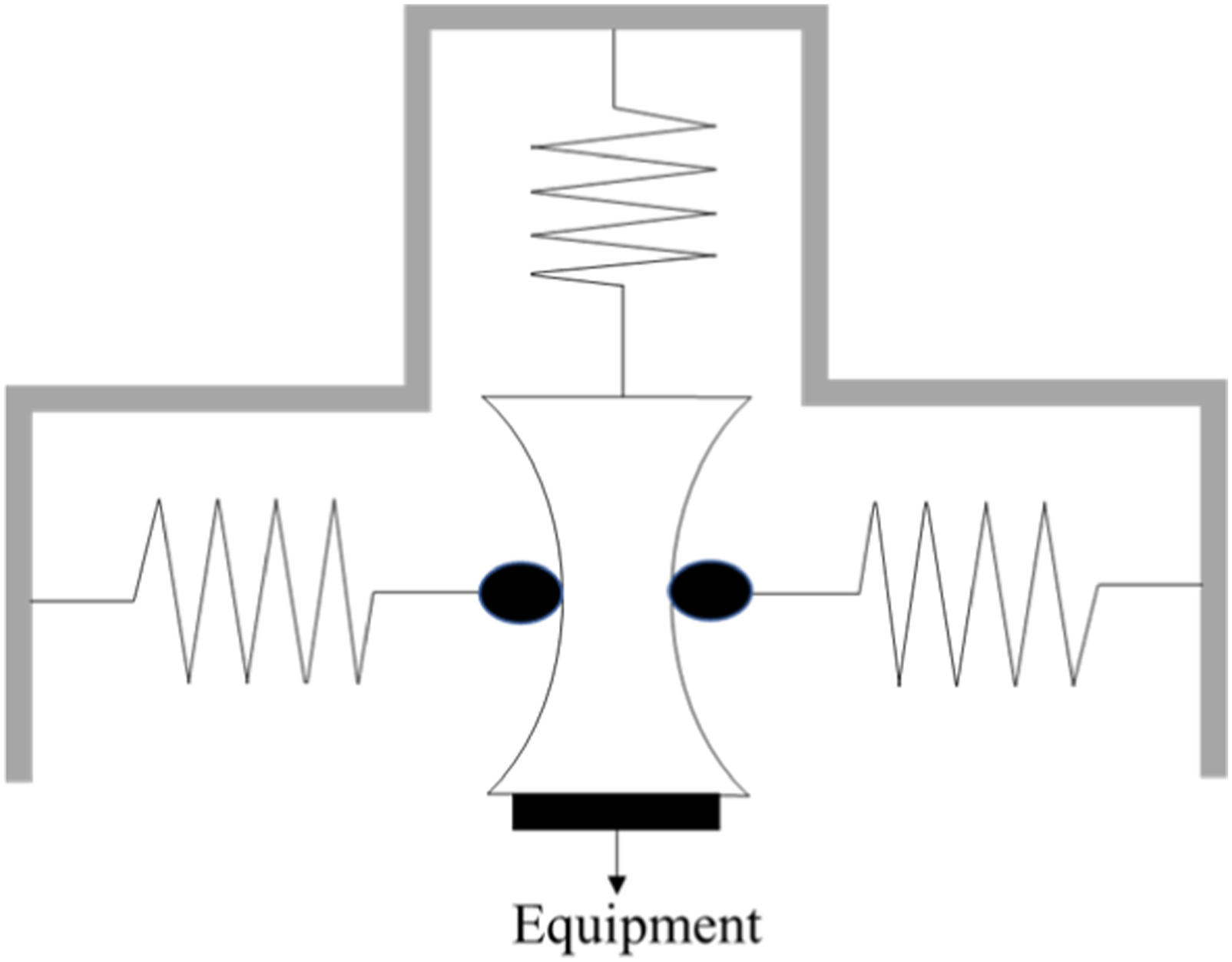
the previous type of connection between on-board and suspended equipment was rigid, so they proposed a new connection for this equipment using spring and rubber. The mechanism of the rubber component proposed in18,19 is depicted in Figure 5. Their proposed connection could correspondingly work as a DVA to reduce vibration and increase ride comfort quality. They additionally provided numerical evidence for their connection. Based on DVA and dynamic unbalance theories, Wang et al.
20
established a mathematical model of a car body with under-frame-suspended equipment and validated it using experimental data to examine the effects of suspended equipment on car body vibration. They further demonstrated that decreasing the mass of suspended equipment and adopting elastic connections could decrease car body vibration and augment ride quality. Moreover, Sun et al.
21
developed a new connection for under-chassis-suspended equipment and termed it a high static and low dynamic stiffness isolator, as depicted in Figure 6. They also employed a negative stiffness unit and a positive linear stiffness spring in parallel to create this connection and quantitatively demonstrated how the given connection could improve ride comfort and reduce acceleration vibration. It should be noted that there is not much variation in static deflection between various connections. The decoupling optimization design method has also received considerable interest in designing car body equipment. In this regard, Xia et al.
22
employed two different types of decoupling optimization methods, that is, forward and inverse methods, and shed light on vibration problems of under-chassis-suspended equipment. To evaluate the natural frequency of this equipment, they utilized DVA and discovered that the eccentricity of this equipment could have adverse effects on ride quality. The new vibration isolator proposed by Sun et al.
21
It is proved that the pitching motion of the car body can provide vertical abnormal vibration at around 8 Hz. For example, Wang et al. 23 developed a DVA, installed it in different places of a train, and reduced abnormal vibration due to pitching of the car body. They also tested their DVA in a real HST experimentally.
A high-speed railway pantograph-catenary system and its contact similarly attracted researchers’ attention. In this regard, Li et al. 24 numerically studied the effects of different yaw angles on the unsteady aerodynamic performance of a pantograph in an HST under crosswind and verified their numerical model using a wind tunnel test. They also demonstrated that having more yaw angles could lead to more flow field asymmetry and vortex intensity near the pantograph, consequently decreasing the aerodynamic performance of the pantograph.
In another study, Wang et al. 25 developed a numerical model of vehicle-track interaction, considering the traction drive system and axle box bearing. To this end, they employed their model to assess train vibration on axle box bearing performance. As a result, they numerically confirmed that the axle box bearing could receive a significant influence from the traction drive system as well as track irregularities. Additionally, Wang et al. 26 proposed an experimentally-based 3D numerical model and studied the effects of vibration and temperature on the axle box bearing of a high-speed bearing. They finally pointed out that the temperature of the axle box bearing of the motor car was higher than that of the trailer one.
To study the torsional vibration of HSTs, Xu et al. 27 established a simplified torsional vibration model with three degrees of freedom and further considered the elasticity of the wheelset. Finally, they stated that if the resistance moments could positively work on the system, it would receive energy and thus the system response would have the self-excited vibration. However, there was no experimental evidence available in their work. Bokaeian et al. 28 investigated the simultaneous effect of torsional and bending flexural vibration of the car body on the ride quality. They further highlighted that the influence of the first bending flexural mode of the car body was much higher than the second bending flexural mode at the car body floor. Concerning the car body wall, the effect of torsional flexural modes could increase, and ride comfort quality index near wall could show higher values. They ultimately concluded that rail irregularities in the right rail are different from those in the left one. Therefore, the vertical acceleration level of the train could be more dependent on the correlation between irregularities of the right and the left rails. They also verified their numerical model through experimental measurements of Shinkansen HSTs.
Ferreira and López-Pita 29 proposed a numerical model to consider the effect of the circulation of trains at a high speed (>300 km/h) on track vibration. Their proposed method was able to assess track vibration and track settlement evolution due to millions of train passages measured via experimental measurement of real HSTs.
If a railway vehicle encounters modal damping abnormal vibration (MDAV), it can seriously influence the operational safety and ride comfort quality of the vehicle. It was reported that MDAV could occasionally occur in vehicles. In this respect, Xia et al. 30 numerically investigated the mechanism of MDAV using a continuous modal tracking method based on the Lagrange cubic spline and proposed an MDAV occurrence criterion to predict MDAV in a railway vehicle.
Train suspension/damper system
It is virtually unattainable to have absolutely no vibration in HSTs. Therefore, vibration in such vehicles must be controlled and mitigated via suspension/damper systems with a proper controller. Generally, a suspension/damper system can be numerically modelled as single-deck, Maxwell, or double-deck models, as shown in Figure 7. Numerical models of suspension/damper for trains. (a) Single-deck model. (b) Maxwell model. (c) Double-deck model.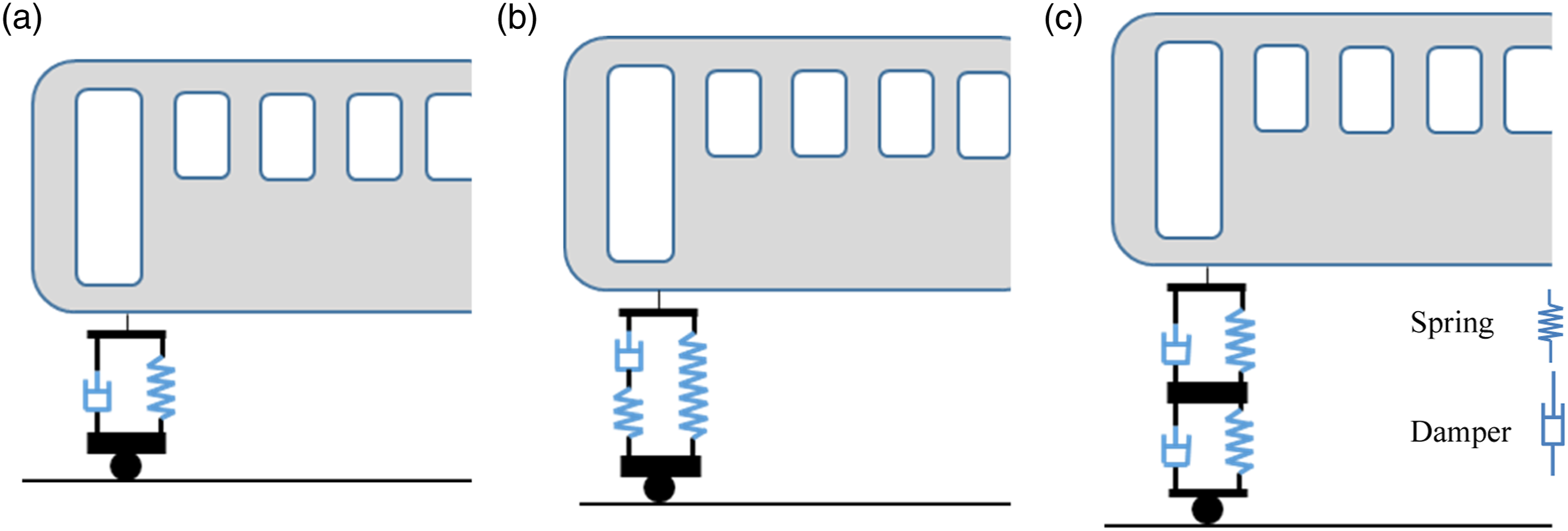
The strategies used to implement the suspension systems are typically divided into passive, semi-active, and active ones. A passive vibration control system consists of uncontrolled elements such as springs and dampers to dissipate energy. They are very simple, easy, and effective near resonance frequency. However, they show poor performance far from the resonance frequency. Besides, controlled suspension systems do not have this limitation and make use of an external power supplier to provide better performance and energy dissipation compared with passive ones. Therefore, the controlled (or active or smart) suspensions are more costly.
Suspension/damper system with an active controller
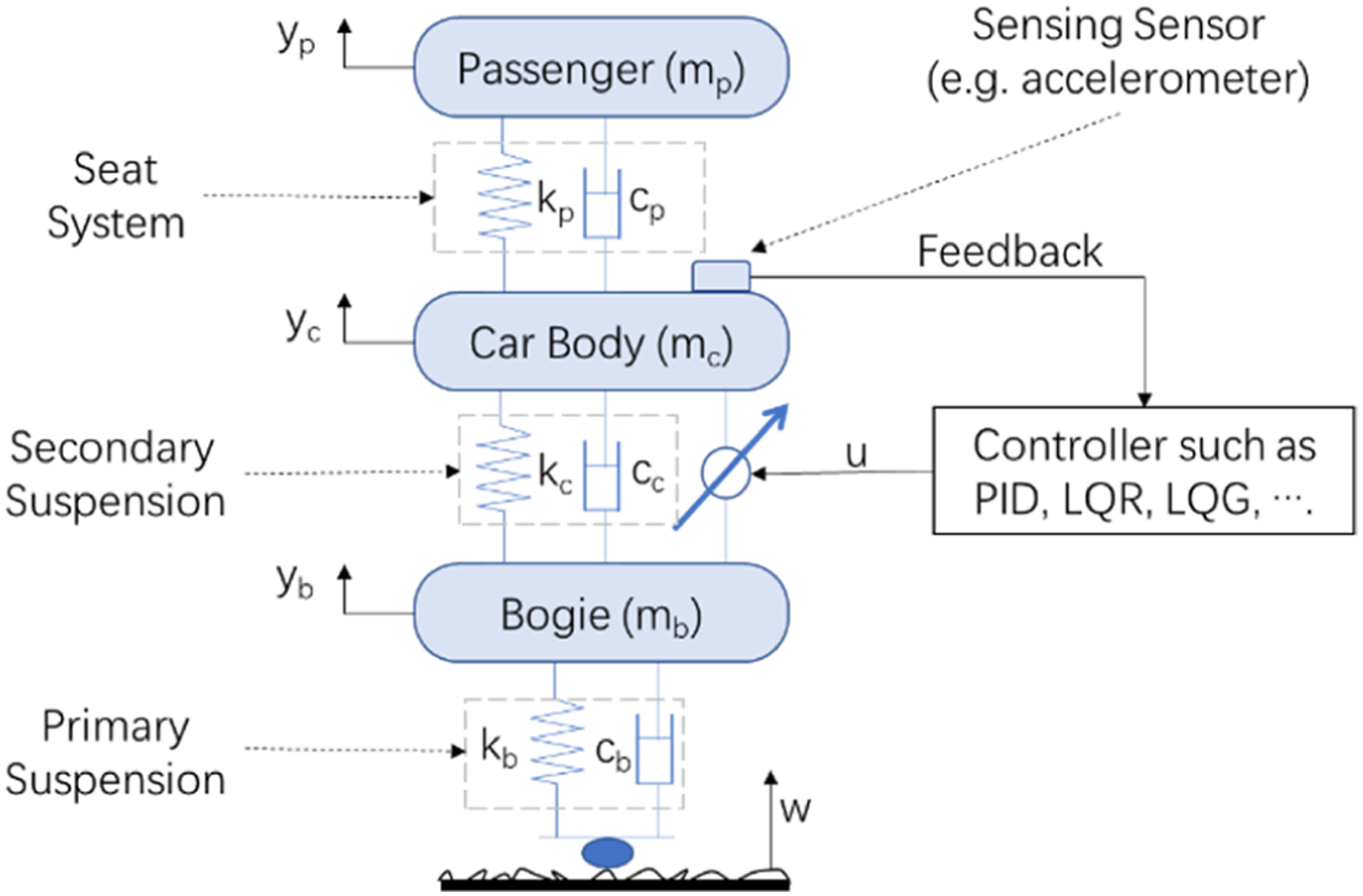
The mass of HSTs is not unique and can be hardly estimated using linear models. Because of the passengers, HSTs do not have a certain mass distribution even during travels between stations. These passengers can be thus considered as live loads that can make changes in the mass distribution along with HSTs at any time. Hence, due to changing parameters associated with passengers and winds, the sprung mass of a train always varies, leading to nonlinear uncertainty. In general, an active suspension system usually needs three main items: (1) control strategy and ability to adapt to noise, (2) system response delay and (3) uncertainty of model used to describe active suspension system and external disturbance. Typical control strategies used in different suspensions system, as shown in the Figure 8, can be also established based on sky-hook and ground-hook theories. System response delay is a parameter that shows how much delay is required for vibration analysis, which is normally taken around 10 milliseconds. Figure 9 depicts a schematic representation of the controller system’s application to secondary suspension, as discussed in numerous literatures such as.
31
Figure 9 can also be depicted in a different way using the transfer functions, as illustrated in Figure 10.
32
Control strategy for double-deck suspension (assuming the control strategy applied to the secondary suspension): (a) double-deck conventional suspension for train, (b) ideal ground-hook strategy for train suspension control and (c) ideal sky-hook strategy for train suspension control. Schematic representation of controller system implemented on the secondary suspension system. Schematic representation of controller system implemented on the secondary suspension system based on transfer functions 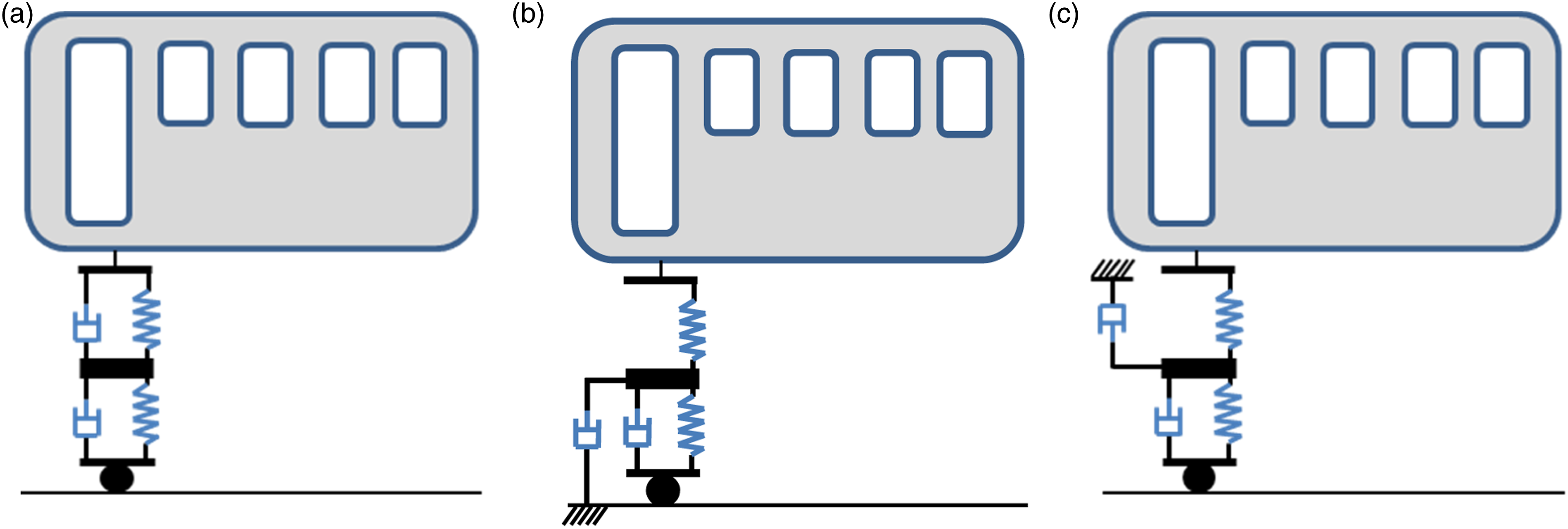
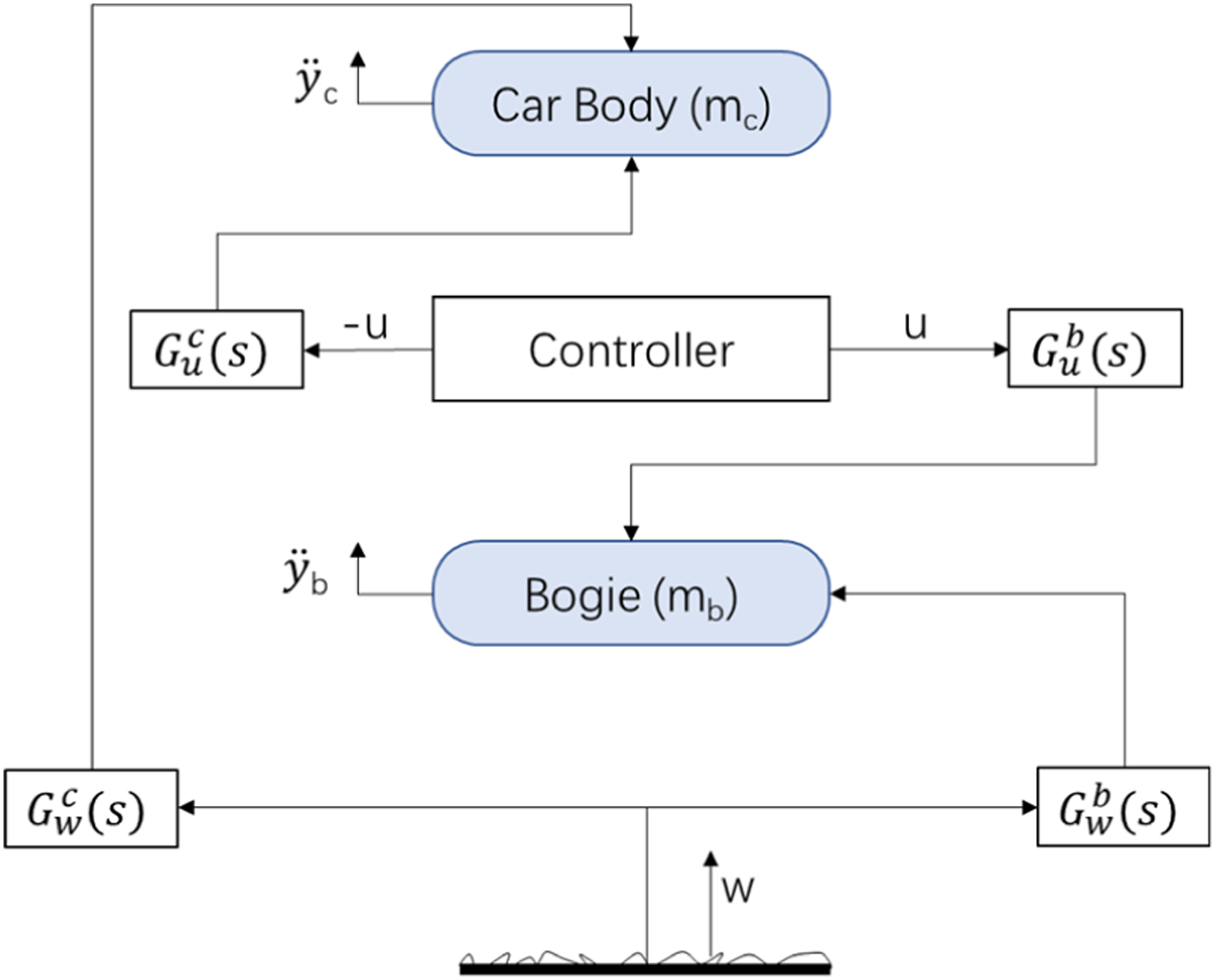
Despite the ultimate installation of dampers between the bogie and suspension, the train’s equation of motion and, consequently, the vibration control of the bogie have relied on the ‘sky-hook’ paradigm for many years. In practice, however, there is no ‘sky’, and the ‘sky-hook’ is merely an imagined ‘rigid ceiling’ for the damper, as illustrated in Figure 8(c), which was assumed to ‘absorb’ the re-action force. However, the mass of the train body or bogie is limited and not infinite; therefore, the rigid re-action base (‘sky’) cannot be sustained. Due to the theoretical barrier of such a model in this area, questions regarding the actual effectiveness of dampers have existed for decades. According to the authors’ experience, although the sky-hook control strategy is widely utilized for vibration control of trains, its control logic suffers from an inherent defect. In fact, since the ‘sky’ does not exist in reality, the interaction force has never existed. However, practically all available literature disregards this critical insight. The control effect has been demonstrated in the literature, but the real mechanism has not been addressed. In the ground-hook theory, it is possible to consider the ground as a solid support. However, it is unacceptable to consider the carbody to be a solid support, particularly when the objective is to control the carbody vibration. This is a significant limitation and challenge for the train industry.
Nguyen and Nguyen 33 experimentally built an active suspension system consisting of an adaptive neuro-fuzzy inference system (ANFIS), sliding mode control, an uncertainty observer, and a magneto-rheological (MR) damper used in the controller. Based on the dynamic response of their suspension, the active control force was determined, followed by estimating the impact of the uncertainty load of the system. In the case that the rate of time variance of the uncertainty is fast, their proposed method loses its accuracy. Nguyen and Seo 34 further enhanced the accuracy of a numerical MR damper model and predicted the track profile status. They also suggested a novel way to establish ANFIS and to improve the performance of the active MR damper.
Zhu et al. 35 briefly introduced some active vibration control methods such as proportional-integral-derivative (PID), positive position feedback, repetitive, and resonant controls, and then unified them as an internal modal (IM)-based form to develop an IM-based resonant controller. They further designed a low-cost active suspension with an IM-based resonant controller to improve the ride quality of HSTs. Their proposed controller only needs acceleration feedback. They numerically proved the efficiency of their active lateral damper system. Hassan et al. 36 addressed advanced PID studies for tilt control based on a published doctoral thesis. Yao et al. 37 compared three different frame vibration control configurations and studied a multi-objective optimal design. They also analysed time delay in active vibration control and pointed out that time delay could be harmful to the stability of the bogie for more than 10 milliseconds. Zhang et al. 38 numerically shed light on the optimal placement of an active damper in the high-speed power bogie of a train. They further considered that the actuator output force could act on the frame between the frame and the motor, and on the motor, respectively. The results of their numerical simulation demonstrated that case one was more effective at a speed of about 500 km/h.
Likewise, Graa et al. 31 modelled different controllers of rail vehicle suspensions. For this purpose, they presented an analytical model of a quarter-rail vehicle with a passenger seat and active-passive suspension. The model had three different controllers, namely, PID Ziegler and Nichols (ZN), linear quadratic regulator (LQR), and PID-LQR. They also evaluated ride comfort quality based on passenger displacement, acceleration, and frequency as a response to two types of rail imperfection excitations. They finally reported the PID-LQR controller as the best active suspension one. Moreover, Hassan and Zolotas 39 addressed the design of a PID-type tilt controller based on the fractional-order method for active suspension systems of HSTs. These researchers numerically verified that the fractional-order–based control strategies needed neither disturbance feed-forward nor estimator.
To improve ride comfort quality and hunting stability, Zhu et al. 32 proposed an active control for the primary and secondary suspension of HSTs using linear-quadratic-Gaussian (LQG) control theory. In this way, they analysed the spectrum of the open-loop system, configured their proposed active LQG controller, and then confirmed that it could reduce vibration due to random and periodic track irregularities. They further mentioned that better ride quality and hunting stability were hardly achieved at the same time, and thus they simultaneously used secondary and primary suspension controls. Zheng et al. 40 utilized a decentralized control combined of active structural damping and active suspension design via LQG and modal control through sky-hook damping, respectively. Afterwards, they utilized piezoelectric actuators and appropriate sensors in their suspension system and proved that their decentralized control could effectively reduce vibration of both flexible and rigid modes. Türkay and Leblebici 41 numerically investigated the effects of random rail input on HSTs and minimized vertical and pitch acceleration of the rail vehicle using an active suspension based on LQG control. These researchers predicted a temporal correlation between the front and rear wheels using a second-order Pade filter and underlined that the use of the Kalman filter could enhance suspension performance.
Combining adaptive and dynamic matrix control algorithms, Li et al. 42 proposed an active control strategy for a new-type intelligent giant magnetostrictive actuator to increase the safety level and ride comfort quality of HSTs under strong crosswind conditions. They further employed numerical simulation to verify the effectiveness of the proposed control strategy.
Besides, Yue et al. 43 suggested a simplified active lateral vibration control in which an active-controlled force was applied to the front and rear frames of the bogie. Their simplified active controller also needs lateral displacement and yaw angle as well as their first derivatives of the frame. Simulation and experimental results accordingly supported their proposed active lateral controller. To control the excessive lateral and roll motions of HSTs, Li et al. 44 proposed an active suspension method and verified it numerically. The given method could attenuate lateral and roll motions with no need for precise suspension and system model details. Also, this method was not sensitive to uncertainties and different operational conditions.
To improve bogie hunting stability, Yao et al.
45
investigated the use of two additional oscillators with an active controller to manage the lateral vibration of HSTs. The actuator output used in their oscillators was thus calculated based on linear state negative feedback of the states of two additional oscillators installed inside the bogie. They further considered time delay in their proposed oscillators and numerically demonstrated that their proposed approach could effectively reduce structural vibration if the time delay is less than 10 milliseconds. In another study, Yao et al.
46
replaced the damper in the suspension system with an actuator and some other components such as hanging rods and a rubber joint. In this way, they proposed active control of the lateral suspension to have a hold over the actuator. Next, these authors numerically proved that the new active suspension system could significantly decrease the lateral vibration of the locomotive. The bogie with two oscillators, considered in these works, is depicted in Figure 11.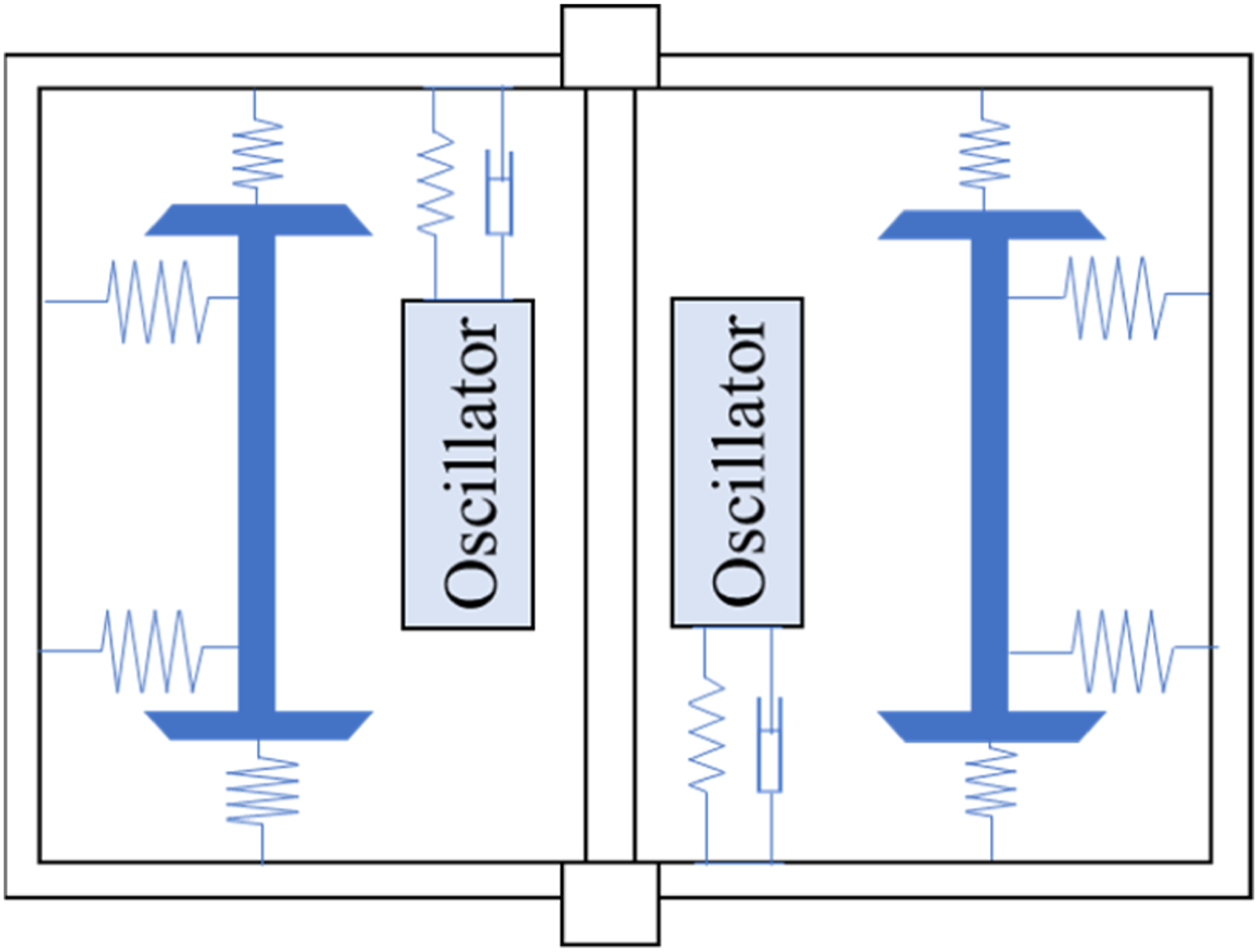
Contact quality in pantograph-catenary interaction is of great importance in HSTs. In this respect, Wang 47 established a simplified numerical model to simulate the pantograph-catenary contact in terms of the vibration provided either in the contact of pantograph-catenary or locomotive and further analysed this model in the frequency domain. He also utilized active control to optimize the contact force in the pantograph-catenary system. In another study, Song et al. 48 suggested a control strategy based on sliding mode control with a proportional-derivative (PD) sliding surface in HSTs with a pantograph-catenary system subjected to a strong stochastic wind field. Their proposed strategy was also supported by extensive numerical verification.
Qazizadeh et al. 49 developed an active vertical damper for secondary suspension using hydraulic actuators in which the sky-hook method was used as an active controller of their damper. The results of their experimental tests also demonstrated that this active damper could significantly enhance the ride comfort quality of HSTs. Ziyaeifar 50 further provided a mathematical solution to study different types of dampers for train vibration control. The given solution can consider either active or passive dampers for the train or a tuned mass damper for the bridge. As a result, it was proved that the active damper could be effective for pitching angle and vertical vibration suppression. Moreover, different types of semi-active damper models (i.e. sky-hook and ground-hook) were discussed for this purpose.
Delayed Resonators (DRs) are another group of approaches in the field of active control dampers that mainly deal with car body vibrations. A DR consists of a mass-spring-damper system at a special frequency, controlled based on delayed feedback. In real practice, DR is very easy to construct and its controller is also assumed to be very simple to implement. In this regard, Eris et al. 51 modified classical DR by adding a control parameter and numerically proved that the new DR could minimize car body vibration in a better manner. Later on, Eris and Ergenc 52 experimentally made an active car body vibration suppression in which a multiple-delay DR could work as a damper. Speed feedback and delayed position feedback were simultaneously used in their modified DR. According to their experimental results, their modified DR attenuated car body vibration with a simple delay scheduling method.
Assuming that the previous information of oncoming disturbance is available, Ulum et al. 53 employed model predictive control (MPC) and proposed an active suspension system control for light rail vehicles. He numerically demonstrated that the suggested active control could enhance the ride comfort quality and safety levels of rail vehicles.
Moreover, Lin et al. 54 utilized Richard Bellman’s principle of optimality for a zero-sum (ZS) game and the Razumikhin theorem and then converted a general robust control problem into an optimal one. Subsequently, they suggested an optimal vibration control strategy for active suspensions of light rail vehicles. They also conducted extensive numerical simulations to prove that the proposed active suspension system could efficiently suppress car body vibration and enhance ride comfort quality.
In addition to the aforementioned literature, a new approach was recently proposed in55–57 that utilizes Tuned Rotatory Inertia Dampers (TRID) and Active Rotatory Inertia Drivers (ARID) to control the rotational kinetics or dynamics of a system with rotational motion or vibrations, as depicted in Figure 12. It necessitates no ‘reaction wall (sky-hook theory)’. It utilizes the relative rotation between the added control system and the target structure. Due to the inertia effect, the control torque or moment can be generated and applied directly to the train’s body or bogie without any additional apparatus. Further details about the TRID and ARID can be found in.58,59 The ARID system for controlling the rolling dynamics of the HST’s bogie has received patents from China, the United States, Japan, Korea, Canada, Australia and Europe. The simplified model of ARID proposed by Zhang and Wang.
55
(a) The location of the ARID system on the train body (b) Configuration of the ARID system.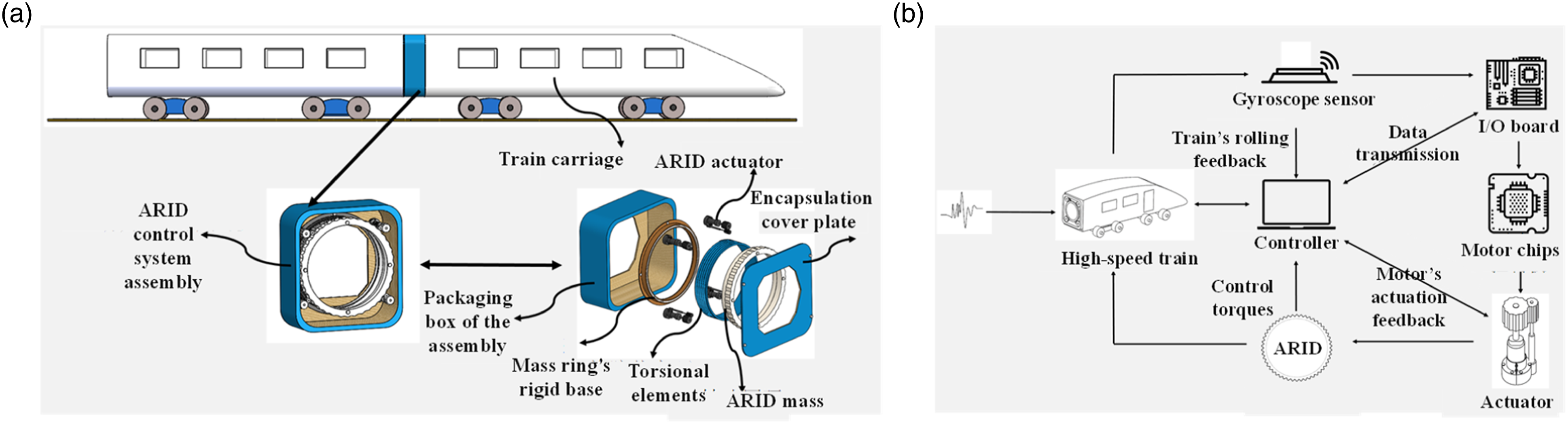
Suspension/damper system with non-active controller
Although active suspension/damper systems show very interesting performance in HSTs, non-active suspension/damper systems are still used because of their simplicity in design, manufacturing, implementation, and cost. Therefore, the authors believe that non-active suspension/damper systems can still be employed in many HSTs and should be addressed in this review as well. In this regard, Liao and Wang 60 theoretically demonstrated that utilizing MR dampers inside semi-active secondary suspension systems could increase ride comfort quality inside the trains. They additionally employed an LQG algorithm that uses the acceleration feedback and works as a system controller. In this controller, the Kalman estimator estimates the state of variables from measured acceleration. To optimize the MR damper performance, a damper controller was proposed to control voltage and to produce optimal damping force. They correspondingly compared the damper with a conventional passive suspension system using viscous dampers without any MR damper. It should be noted that MR fluid shows viscoelastic plastic behaviour and leads to three nonlinear characteristics in the MR damper: (1) nonlinear hysteresis phenomenon, (2) nonlinear roll-off as velocity approaches zero and (3) a variant of hysteresis width in terms of excitation frequency, displacement, and input current. Li et al. 61 proposed a viscoelastic plastic method to accurately model these nonlinear properties and to estimate MR damper responses. In their work, they measured force–velocity, force–displacement, and force–time data from a dynamic test of a semi-active MR damper. The accuracy of their method was also proved experimentally.
Guo et al. 62 proposed a new strategy for a semi-active controller based on sky-hook theory and numerically proved that this new strategy is able to effectively decrease the derailment coefficient and increase the train safety level. Likewise, Kim et al. 63 experimentally compared the ride quality of rail vehicles with both passive and semi-active MR dampers. To this end, they first analysed vibration recorded from a real train with passive dampers to identify semi-active MR damper parameters. Then, they manufactured semi-active MR dampers and replaced them with passive ones. The analysis of the data obtained from the train with semi-active MR dampers showed a 29% improvement in ride comfort quality. They further used a sky-hook controller for their semi-active MR damper.
The vehicle steering issue can also be solved using an active damper. However, the implementation of an active damper is not easy due to the need for a higher number of actuators. In this respect, Wei et al. 64 installed four semi-active MR fluid dampers on the primary suspension of each bogie to control the lateral movement of the suspension system. For this purpose, they proposed two strategies to control their semi-active MR dampers. Accordingly, the first suggested strategy could work better, and it only needs the angular velocity of the bogie and wheelsets. It could also efficiently reduce derailment risk. Oh et al. 65 installed a semi-active MR damper in the lateral direction in a way that it could connect the car body to the bogie. They also experimentally proved that using a sky-hook controller associated with an extended Kalman filter could enhance ride quality significantly. Sharma and Kumar 66 further utilized experimental data of vertical, pitch, and roll motions of the car body and bogies with a passive system to develop an equation based on reality and proposed a semi-active MR damper for a secondary vertical suspension system. They additionally established their equations based on real tests and verified their suggested semi-active MR damper using a numerical model. Having vertical and pitch motions on one side and a deformable mode shape of the car body on the other side might require the high performance of suspension dampers at low frequency and low force at high frequency. To meet this need, Ripamonti and Chiarabaglio 67 attempted to modify a damper by installing a servo-valve between the chambers of a damper. Using this modification, they proposed a semi-active damper with three different controller strategies and verified it experimentally.
Nguyen et al. 68 developed a new controller based on an optimal fuzzy disturbance observer-enhanced sliding mode for a semi-active MR damper in which the controller could decrease the effect of uncertainty and disturbance. They also made a small experimental model to support their proposed controller.
A Maglev actuator can provide large forces without contacting structures. However, there is a nonlinear behaviour in the load provided by a Maglev actuator that should be controlled. The strategy to manage this nonlinear behaviour is using a linearization process that involves a margin of error. In this line, An et al. 69 came up with an idea to control nonlinearity without linearization. Using a radial basis function network as a controller, they numerically and experimentally proved that the proposed algorithm could effectively decrease the energy of periodic vibration. Track-induced self-excited vibration was also introduced as an important problem in electromagnetic suspension Maglev systems. In this context, Zhou et al. 70 utilized the harmonic balance method and illustrated that the given problem generally occurred at a specified amplitude and frequency. To eliminate this problem at the levitation gap of the Maglev system, they further employed an improved least mean square cancellation algorithm with phase correction. Subsequently, they numerically and experimentally demonstrated that the given algorithm could either estimate the frequency accurately or suppress the self-excited vibration effectively. Later on, Zhou et al. 71 proposed a levitation model based on the urban Maglev train. To suppress the vibration of the rear levitation gap in a levitation module, they accordingly suggested an adaptive vibration control scheme, comprised of a pair of mirror finite impulse response (FIR) filters and an adaptation mechanism. To generate a compensation signal for the rear levitation unit, the scheme of their levitation module could also use the front one. The results of their proposed levitation module thus indicated that the adaptive vibration control method could efficiently reduce the vibration of the rear levitation gap in all these situations.
Zhu et al. 72 developed a numerical model of a metro vehicle to examine how DVA suppresses the vibration of floating slab trucks. To this end, they first determined the optimum place for installing the DVA and then identified the optimum mass, stiffness, and damping coefficients. It was numerically confirmed that the proposed DVA could effectively suppress the low-frequency vibrations of floating slab tracks.
Yuan et al. 73 proposed an adaptive PD method to control suspension and to decrease lateral motion and derailment risk and consequently validated it using an analytical approach. Dumitriu 74 further proposed a new passive approach in which two anti-bending bars were attached to the longitudinal beams of a car body under-frame. The proposed passive approach confirmed that the anti-bending bars could increase the natural frequency of the car body and lead to better ride comfort. The proposed passive approach was also numerically verified. In another study, Ding 75 established a numerical model and advocated using a longitudinal shock absorber to suppress the vertical vibration of the middle part of a car body.
There are three-angle motions for a train, namely, yaw, roll and pitch. These motions can be mainly controlled and attenuated through dampers. To attenuate the yaw motion, Huang and Zeng 76 proposed a yaw damper, sensitive to small harmonic movements between 0.5 and 2 mm, and validated it experimentally. They also offered a mathematical model for their yaw damper and proved that the percentage of the entrapped air in oil, rubber attachment stiffness, and leakage flow could have a significant effect on the dynamic behaviour of the yaw damper. However, they did not consider the temperature in their assumptions.
Shi et al. 77 found that vibration suppression using re-centring negative stiffness dampers with a semi-active controller could have more benefits than active ones. They thus considered the damper made of a passive magnetic negative stiffness spring and a semi-active positioning shaft for re-centring function. They also numerically demonstrated their proposed negative stiffness damper. In the related literature review, Shi et al. 77 were found as the only researchers who believed that their semi-active controller could work better than an active one. Other researchers working on non-active suspension/damper systems did not compare their proposed controller with active ones, probably because they thought an active suspension/damper system could surely work better than a non-active one.
Although it has been evidenced that a suspension/damper system can effectively reduce unwanted vibrations and increase the safety levels and ride comfort quality of HSTs, damage to such a system can also lead to serious problems and affect the operational performance of HSTs. In this context, there are two approaches for the health monitoring of suspension/damper systems of HSTs. The first one is to detect the damage inside the system, and the second one is to adapt the controller to the damage, so the damper can still be used in such conditions. Investigating the details of these two categories is beyond the scope of this paper, and therefore, they are not addressed in this review. Readers can find more details of suspension/damper health monitoring in.78–83 Moreover, the damage to HSTs is another problem with serious effects on train performance. Because trains can be checked using visual inspection, the literature on health monitoring of HSTs is almost focused on bogies. Notably, there are limited studies on this issue compared with other parts of HSTs, such as those addressed in.84–86
Interior noise
The use of trains for a long period makes the railway industry pay attention to the sound quality inside such vehicles. For example, Soeta and Shimokura 87 studied the effects of wheel-rail friction, motors, and tires on the interior noise of trains. They further considered several parameters for interior noises and divided different noises into various categories based on their frequencies. Finally, they concluded that using advanced technologies to reduce vibrations, such as dampers, could decrease interior noise as well. Later on, Fan et al. 88 conducted a similar study and statistically analysed sound intensity near floors and windows. Accordingly, they divided potential sources of noise into three categories: interior sources such as ventilation and air conditioning systems; exterior sources (such as wheel-rails, brakes and compressor); and vibrating car bodies. They ultimately concluded that sound intensity levels were higher near the floor than near the windows.
HST interior noise at low, medium, and high frequencies can be simulated by finite element analysis (FEA) or boundary element analysis (BEA), hybrid finite element analysis-statistical energy analysis (FEA-SEA), and statistical energy analysis (SEA), respectively. In this regard, Zheng et al. 89 proposed a new method named statistical acoustic energy flow (SAEF) that could simulate full-spectrum HST interior noise. In the SAEF model, the corresponding multi-physical-field coupling excitations were fully considered and coupled to excite the interior noise. The interior noise attenuated by the sound insulation panels of the carriage was then simulated through modelling of inflow acoustic energy from exterior excitations into interior acoustic cavities. Zhang et al. 90 accordingly employed SEA and contribution analysis of the interior noise of HSTs and concluded that the key factors for interior noise were sidewall vibration, bogie area noise, and floor sound transmission loss. In another study, Noh 91 merely employed contribution analysis, studied the interior noise of HSTs using accelerometers and microphones, and mentioned that wheel noise could be the main contributor to interior noise. This means that the rolling noise could have more influence than the aerodynamic noise aboard HSTs.
In another work, Zheng et al. 92 employed energy FEA and analysed the interior noise responses of extruded structures in HSTs. They accordingly decomposed different sources of interior noise and concluded that damping wheels and DVA could have a great effect on interior noise reduction. Dai et al. 93 proposed a new method named statistical vibration and acoustic energy flow to predict the full spectrum of interior noise in low, medium, and high frequencies. Compared with the experimental data, they demonstrated that their proposed method could accurately predict the interior noise.
The train-wheel squeal noise was considered by Marjani and Younesian 94 who analysed the model of a wheel, rail, and foundation in the frequency domain. They thus utilized a piezoelectric patch to reduce noise in the train-wheel squeal. Also, Qian et al. 95 proposed a method to predict vibration and noise inside HSTs based on nonlinear autoregressive exogenous (NARX) NN and multi-body dynamic models. Finally, they experimentally verified their proposed method.
Issues indirectly related to train vibration control
It is well proven that structures under railways, such as the ballastless railway, can significantly reduce train vibration. Understanding the distribution and magnitude of vibration of railway structures is thus of utmost importance. This vibration can be transferred to a train due to train-track interactions. Any efforts to control or decrease railway structure vibration can thus lead to mitigated vibration and enhanced ride comfort quality. Hence, in this section, the literature on understanding railway structural dynamics and vibration control of ballastless track and railway bridges was addressed.
Railway structural identification
The velocity of HSTs is the most critical parameter in determining the amplitude of train-induced dynamic load on trains and railway structures. The interest of train companies in higher speeds and more train safety thus dwindles as velocity increases. The railway track is one of the most important factors in determining the critical speed of a train. Therefore, the critical speed on a ballasted track was extensively studied. However, there is a lack of investigation into the critical speed of a train on a ballastless track. In this regard, Hu et al. 96 numerically simulated a train on a ballastless track and examined the dynamic responses of the ballastless track following HST passages. They further pointed out that the critical speed was higher than the Rayleigh wave velocity of the underlying soil and closer to the Rayleigh wave velocity of the subgrade. It was also highlighted that the subgrade thickness did not affect critical speed, but it could control track displacement. Finally, they concluded that having an embankment could improve critical speed while it could decrease the inhomogeneity of transverse distribution and amplitude of vertical stress at the ground surface.
Chen et al. 97 experimentally built a full-scale model of the ballastless track-subgrade system to study the effect of the speed of trains on the dynamic strain of the slab and the dynamic earth pressure of the subgrade. They also proposed a relationship between dynamic load magnification factor and train velocity. Finally, they mentioned that the Chinese high-speed railway standard underestimated this factor. Bian et al. 98 further built a full-scale of the ballastless system and explained similar ideas based on their model. In this line, Connolly et al. 99 measured vibration on the ground under the passages of HSTs. They thus found that vertical vibration near the railway was higher, while horizontal vibration far from the railway had the same amplitude as the vertical vibration or was even the prominent component. In line with these studies, Feng et al. 100 measured vibration at the embankment, culvert, viaduct, and transition section and almost pointed out the same results as shown in Ref.99. However, they demonstrated that longitudinal vibration was dominant in the near field in both the viaduct and culvert. They also highlighted that horizontal vibration was important in most situations and could not be neglected.
In this line, Bian et al. 101 developed a 2.5-dimensional FEM to investigate vibration responses of railways following passages of HSTs and found that track irregularities of smaller wavelengths induced higher vibration frequencies and significantly higher vibration responses from the track and the ground compared with track irregularities of longer wavelengths. However, low-frequency vibrations induced by the latter propagate to a longer distance compared with the former. The critical velocity of the ballastless slab track-ground system was thus greater than the Rayleigh wave velocity of the soft layer of the sub-soil. Whenever train speed is lower than the critical velocity, irregularity affects vibrations of the track and the surrounding ground considerably. In this regard, Shi et al. 102 proposed a theoretical solution to evaluate HST-induced vibration of saturated soil under an evaluated bridge. They thus proved that the first natural frequency of the girder beam with elastic bearing and the first natural frequency of pier beam supported by pile foundation could be the two important modal parameters of the superstructure dominating the ground displacement response. Moreover, Fang et al. 103 employed an artificial NN and proposed a numerical model to predict the acceleration vibration level in the railway foundation under passing HSTs. They similarly used a numerical model and experimental data to train the artificial NN. Their proposed method could accurately predict the acceleration vibration level in the railway foundation. In line with these studies, Zhu et al. 104 numerically modelled a full scale of a high-speed railway station and studied its behaviour under passing HSTs. They numerically proved that the vibrations induced by train passages were predominately vertical and vibration was decreased regardless of train passage speed.
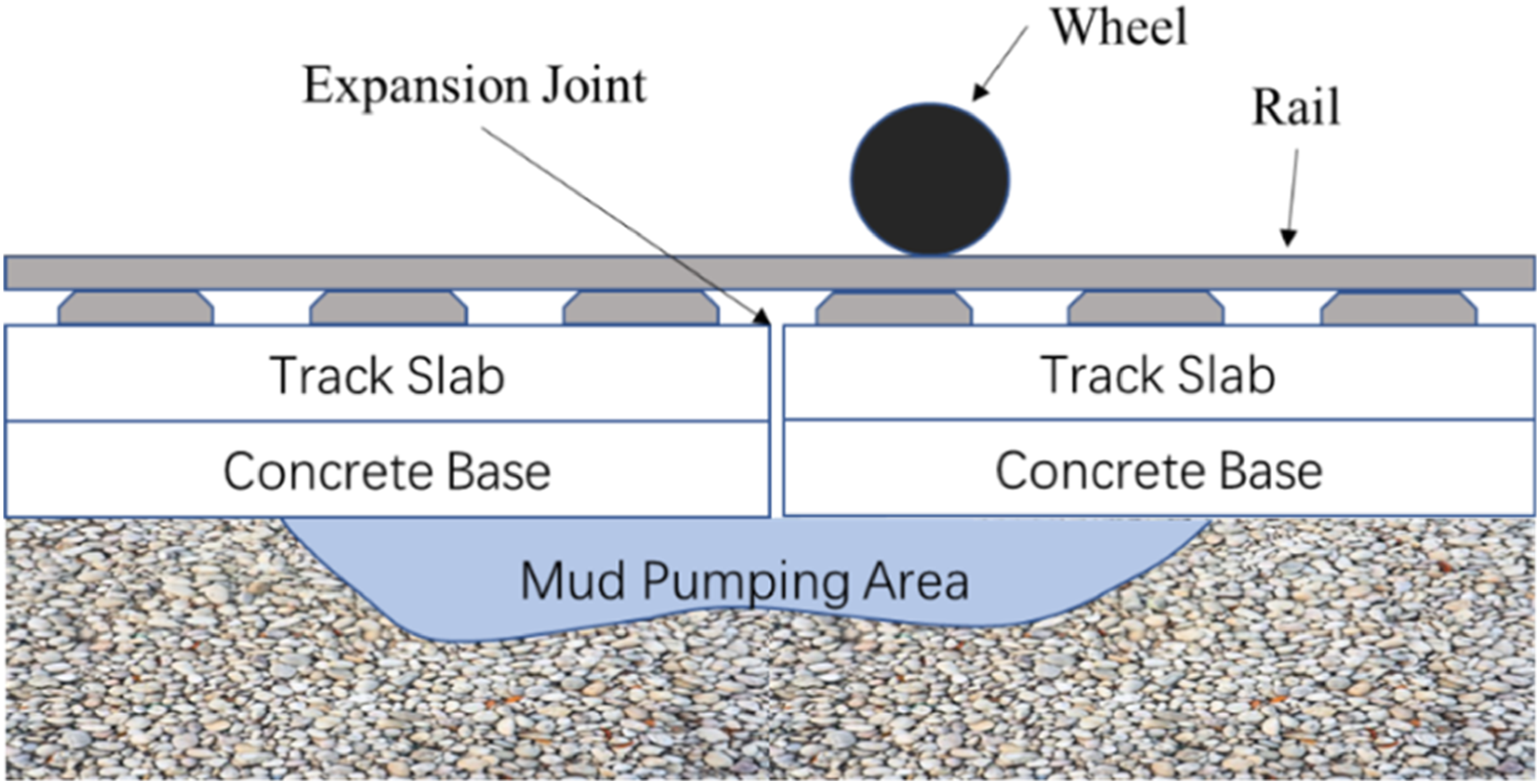
It is of note that mud pumping is a problem that usually occurs in the subgrade bed near the expansion joint of the concrete base, as depicted in Figure 13. It is also harmful due to squeezing a large number of fine particles out of the subgrade bed. Huang et al.
105
found that the vertical acceleration of the concrete base could be about twice as high once the mud-pumping problem occurred and proposed a practical solution to deal with this problem and control the acceleration and displacement of the concrete base. The potential mud-pumping problem in the subgrade bed near the expansion joint (a longitudinal profile view).
105
Moreover, Cao et al. 106 studied water pressure in ballastless track cracks under HSTs and pointed out that in rich-rain and poor-drainage places, there was a possibility of having water damage in the interlamination of the ballastless track. They further established a numerical model based on fluid-structure interaction theory and explained hydrodynamic changes in different crack characteristics under different trainloads.
The experimental measurement of the bridge under a moving load shows a constant component with another alternating component in the range of 0–6 Hz. Accordingly, Garinei and Risitano 107 numerically modelled a simply supported beam under different combinations of moving loads to study deflection in small- and medium-span bridges. They also concluded that it was necessary to attenuate alternating components induced by the axles of the train by using a shock absorber in the suspension system for a train-track system.
Moreover, it has been found that the flexural wave modes of the ballastless track are correlated with rail axial force. In this respect, Yi et al. 108 provided a numerical model based on the wave final element method and in situ results to prove this correlation between rail axial force and flexural modes of ballastless track. They also explained the effect of temperature variations on their results in detail. Moreover, the wheel-rail interaction induces dynamic actions to support track structure in a wide range of frequency spectra and amplitudes and also provides noise and vibrations. Railway noise is thus generated in various forms and spectra, including undesirable railway sound and vibration, including rolling noise, impact noise, curve noise, mechanical noise, airborne noise, wheel-rail noise, as well as structure- and ground-borne noises. In this line, Kaewunruen and Remennikov 109 reviewed recent studies on railway track vibration isolation in Australia. In 2015, the Chinese government also implemented an elastic rubber mat on the vehicle-track-bridge-ground system of the Chengdu-Dujiangyan high-speed railway system to decrease vibration and noise due to passing trains. Zhao and Ping 110 also investigated the effects of this rubber mass on vibration and noise reduction and concluded that the mat could still reduce the noise, increase the vibration of components upon the mat, and attenuate the vibration of components below it. They also mentioned that ageing could increase the stiffness of the mat and decrease its efficiency. Due to passing HSTs, a wind load is produced that is sometimes not negligible. Rocchi et al. 111 experimentally investigated the effects of HST passages on people and other structures. Meta-barrier is a new isolator technique for the floating slab track of HSTs. For example, Zhao et al. 112 established a numerical model and studied the effect of meta-barriers in reducing vibration due to train passages. They further declared that an optimized meta-barrier could reduce the acceleration vibration level by more than 9 dB over the steel-spring vibration isolator.
Bridge dampers
The performance of railway bridges should be monitored as well. Their possible structural damage or their dynamic behavior need be determined to ensure that they don't have bad effect on the passage of HSTs.113, 114 Bridges are flexible structures that receive dangerously unwanted vibration due to the passage of HSTs. This vibration can also be transferred to the train due to train-bridge interaction, especially at a critical speed. Therefore, using dampers in bridge structures is the most practical solution to simultaneously improve the safety of bridges and trains.
Wang et al. 115 studied the application of tuned mass damper (TMD) on a steel truss bridge, built a numerical model of a real bridge and considered trainloads on it, even in terms of two opposite simultaneous trainloads. They further pointed out that increasing either mass or damping of TMD could lead to better vibration attenuation. Lin et al. 116 also utilized a multiple TMD system (instead of a single TMD) installed inside the bridge to change modal parameters and avoid resonance. They thus numerically proved that the given system could significantly attenuate bridge vibration during passing HSTs. Pisal and Jangid 117 also numerically investigated the application of different arrangements of multiple tuned mass friction dampers on the vibration suppression of bridges subjected to train load. They further considered the bridge as a simply supported Euler-Bernoulli beam and the train as a series of moving forces. Later on, Kahya and Araz 118 numerically proved that using a series of multiple TMDs was more effective than using one multiple TMD to reduce bridge vibration. Also, Yin et al. 119 proposed that a pounding TMD could consist of a TMD and a viscoelastic layer covered by a delimiter for impact energy dissipation. Compared to a conventional TMD, they demonstrated numerically that this pounding TMD could reduce vibrations more effectively, and that this reduction could be optimized using multiple pounding TMDs.
Muhammad et al. 120 also performed a valuable review of MR fluids and their applications in the vibration control of different structures and machines. It is of note that the performance of the Maglev system also suffers from self-excited vibration occurring between the stationary electromagnetic suspension Maglev system and the girder. In this respect, Zhou et al. 121 described the principle of this vibration and numerically proved that utilizing a virtual TMD could suppress this vibration. They pointed out that there is a time-delay problem with such a system, and thus they employed a time-delay controller to stabilize the proposed system.
The electromagnet suspension (EMS) Maglev train also uses controlled electromagnetic forces to achieve suspension; thus, self-excited vibration may occur due to the flexibility of the track. The harmonic balance method was utilized to study self-excited vibration and found that the amplitude of the vibration depends on the voltage of the power supplier. 122 Therefore, a vibration amplitude control method using a PI controller was proposed and its effectiveness was numerically validated. 122
Rådeström et al. 123 reduced the vibration of a railway bridge using a fluid viscous damper (FVD) to an acceptable level of Eurocode. To this end, they assumed that the damper could not change the mode shape of the bridge. The results were proved numerically. Lu and Li 124 further investigated longitudinal resonance and vibration in a cable-stayed bridge numerically, proposed a formula to estimate the longitudinal resonant speed of the cable-stayed bridge, and utilized an FVD to control and suppress this vibration.
Conclusion
To identify solutions for enhancing ride comfort quality, increasing critical velocity, and reducing interior noise in HSTs, the literature pertaining to vibration control of HSTs were reviewed and discussed in this paper. All the studies in this field were classified into two main categories: direct and indirect solutions. Each one of these two major approaches contained various sub-categories. All the studies in the reviewed literature were placed in these sub-categories, and their achievements and methodologies were explained briefly. The findings revealed that an emphasis was placed on train vibration control using suspension/damper systems. To find a proper practical solution for HST vibration control, understanding the dynamic behaviour of train and railway structures was of utmost importance. It was also discussed that the train’s equation of motion has relied on the sky-hook model for many years. Since the ‘sky’ does not exist in practice, the rigid reaction base (‘sky’) cannot be sustained; this presents the main challenge for active control strategies that use sky-hook. A solution to the sky-hook logic problem was also addressed properly using ARID.
Based on the results of this review, the most practical solutions to increase critical velocity, enhance ride comfort quality and decrease interior noise in HSTs are as follows: • Employing active suspension/damper systems in HST bogies to mitigate train vibration. • Using elastic connection for under-chassis-suspended equipment of HSTs to decrease the effect of this equipment on the vibration of the car body and having a proper design could attenuate the weight and eccentricity of this equipment. • Implementing ballastless railway. • Employing dampers in railway bridge to control bridge vibration
In the continuing of research in the field of railway vibration control, it appears that further research on active control systems using ARID can produce tangible results. Further research is being conducted by the authors in this topic.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is financially supported by the Ministry of Science and Technology of China (Grant No. 2019YFE0112400) and the Department of Science and Technology of Shandong Province (Grant No. 2021CXGC011204).