
Abstract
The ride comfort is a key research area for the quality improvement of railway vehicles. Several control methods have been developed to improve the ride comfort, in which the semi-active control approach inherits the advantages of passive and active control approaches. However, the semi-active control may perform ineffectively in vibration attenuation when the carbody load changes. To address this issue, we proposed a novel hybrid control method that combines the skyhook (SH) and displacement velocity (DV) control methods to reduce vibrations of the carbody in the lateral direction under carbody load changes. First, a hybrid control model built in Matlab software was applied to a quarter railway vehicle model for a preliminary assessment of the ride comfort. Second, to provide a more comprehensive evaluation, the proposed model was applied to a whole railway vehicle model using co-simulation (Matlab-Simpack). In the quarter model, under the sinusoidal excitation, the hybrid control showed a lower acceleration by 48.5% and 42.8% when the carbody load reduced to a half and a quarter, respectively, compared to the passive control. This finding was confirmed with the whole model. Moreover, in the whole model, under the track irregular excitation, the hybrid control showed a lower acceleration by 26.6% and 17.4% when the carbody load reduced to a half and a quarter, respectively. Further, the proposed method showed an acceptable safety level, measured by the derailment coefficient (0.0743 at a half load and 0.089 at a quarter load). In conclusions, the proposed hybrid SH-DV control exhibits high robustness, adaptability, effectiveness, and acceptable safety level in response to variations in body load.
Introduction
Railway vehicles form the backbone of efficient transportation systems, serving to drive economic development, alleviate urban mobility challenges, and foster social connectivity. 1 The continuous expansion in operation speed and carbody’s load of the railway vehicle warrants the enhancement of the ride comfort and safety level. As a conventional approach, the passive control of the suspension system has been commonly used because of its robustness, simplicity, reliability, and cost-effectiveness in suppressing vibrations of the carbody derived from the rail track irregularities. However, this approach mainly utilizes a fixed damping coefficient, which might be ineffective when working within a wide range of vibration frequencies. 2 The drawbacks of passive control can be addressed with the active control approach,3–5 which has an excellent control performance and robustness in improving the ride comfort of the railway vehicle. However, this advanced approach also exists several limitations, such as high costs, high energy consumption, structural complexity, demanding maintenance requirements, and weight and space constraints. 6 As a potential alternative for the two methods mentioned above, the semi-active control suspension approach offers several advantages over passive suspension systems while mitigating some of the drawbacks of active suspension systems, including high cost-effectiveness, simple structures, high reliability, low energy consumption, and easy integration into existing infrastructure. 7 In previous studies, the semi-active control method has been applied in various suspension system of railway vehicles, such as electrorheological (ER) damper equipment by Hoseinzadeh et al., 8 hydraulic damper equipment by Ripamonti et al., 9 and magnetorheological (MR) damper equipment by Kim et al. 7 and Sharma et al. 10 Among the semi-active suspension systems, the magnetorheological damper (MRD) stands out as the most effective semi-active damper due to their ability to rapidly adjust damping force in response to changeable track conditions. In addition, the MRD provides a wide range of damping coefficients from soft to stiff damping under the change of external magnetic field. 11
Many semi-active control algorithms have been deployed to MR damper of railway vehicle suspension system to suppress undesirable vibrations, which can be divided into two main approaches. The first approach referred to as the singular control approach includes conventional control methods (e.g., skyhook (SH),
12
acceleration-driven-damper (ADD),
13
and displacement velocity (DV)
14
controls) and intelligent control methods (e.g., fuzzy logic control
15
and neural network16,17 controls). The conventional methods of singular control approach may work ineffectively in a wide range of vibration excitation frequencies. For instance, SH control is effective only at low frequencies, whereas ADD or DV can work well only at high frequencies. On the other hand, the intelligent control methods of singular control approach offer higher effectiveness in vibration isolation; however, they have several limitations, including high costs, and a requirement of extensive experimental data collection. The second approach involves the combination of various singular control methods, such as SH-DV,
14
SH-ADD,
18
and self-adjusting hybrid damping (SAHDC) control.
19
This approach not only inherits the strengths of singular control methods but also mitigates their individual weaknesses, that is, ability to work effectively in a wide range of vibration excitation frequency. However, the mixed control approach may show limited performance in vibration isolation under the carbody’s load changes. In this study, we pointed out this issue through simulation results of a mixed SH-DV control theory
14
applying into a quarter railway vehicle model when the carbody load reduces to a quarter of the full load as shown in Figure 1. Therein, the ride comfort of the carbody was evaluated using the transmissibility of carbody acceleration. Specifically, at low frequencies, the mixed SH-DV control method only reached approximately 70% of the asymptotic effectiveness that could be achieved with the SH control. In contrast, at high frequencies, this method achieved approximately 90% of the asymptotic effectiveness of DV control. The ineffectiveness of the mixed SH-DV control might be attributable to inaccurate transition point of control states under the carbody load changes. Transmissibility characteristic curves for several commonly used control methods at a quarter of the full carbody load.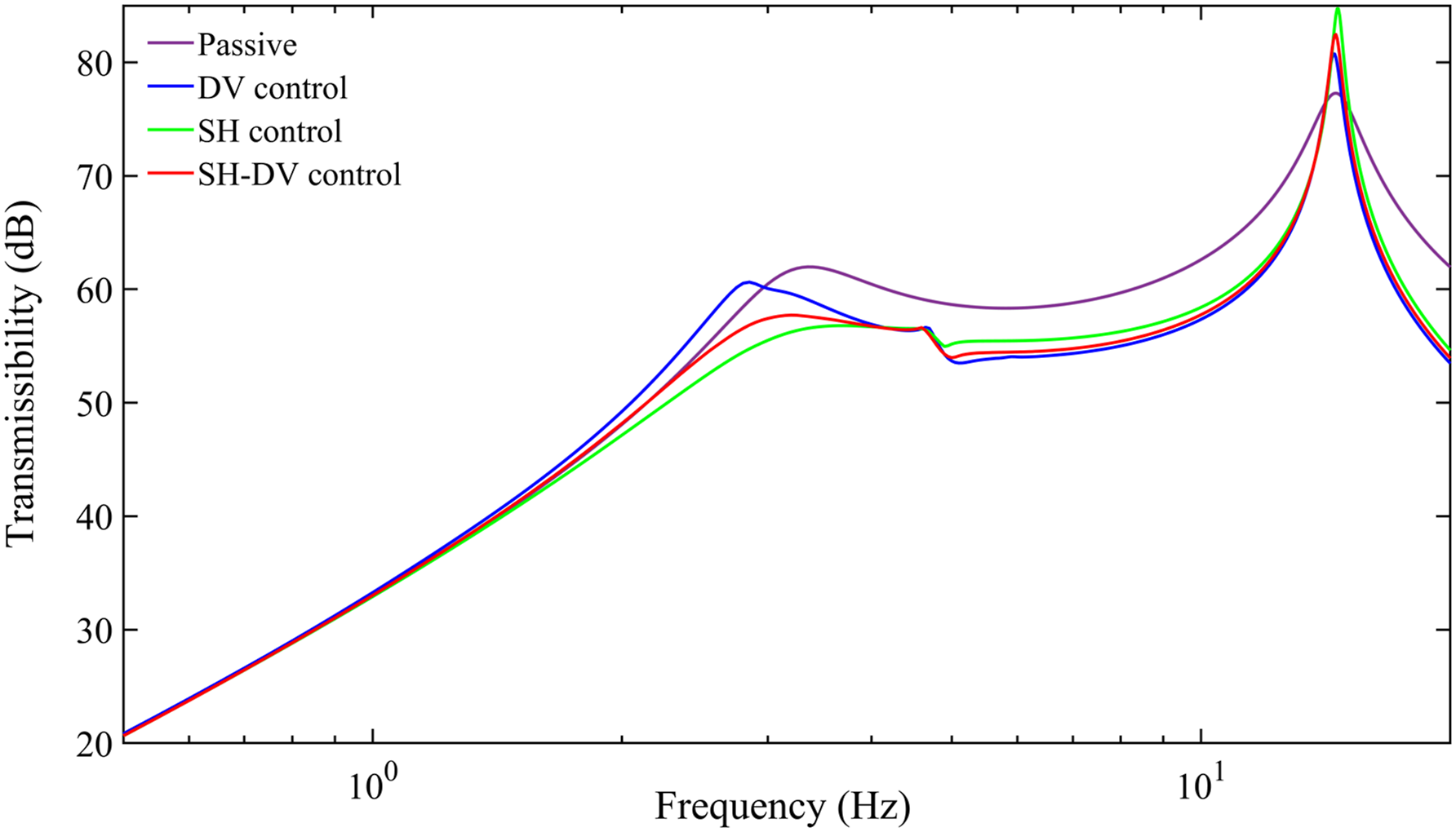
To overcome this limitation, we proposed a hybrid SH-DV control with two transition points of control states, corresponding to three control regions: SH for low frequencies, DV for high frequencies, and mixed SH + DV control for frequencies in response to the carbody load changes. This approach can adapt to a wide range of the carbody load changes while inheriting the advantages of individual control methods. The effectiveness of this proposed control in improving the ride comfort was verified using a whole railway vehicle model in Simpack in conjunction with a hybrid control model in Simulink (i.e., co-simulation).
Analysis railway vehicle model
Modeling
Two numerical models that represent real railway vehicles were employed to verify our proposed hybrid control theory at different carbody loads: (1) a quarter railway vehicle model and (2) a whole railway vehicle model. The ride comfort was evaluated preliminarily in the quarter model and more precisely in the whole model under the vibration excitation following a sinusoidal function. To be close to the real-world application, the track irregularity was also applied to the whole model and provided a more comprehensive evaluation of the ride comfort and the running safety level.
Quarter railway vehicle model
For ease of implementation, a quarter railway vehicle model was used to provide a primary evaluation of the proposed hybrid control method on the ability of vibration isolation, using Simulink/Matlab. A quarter model (often referred to as a static model) is a simple model that has been widely used in numerical simulation in transportable vehicle research. It includes primary and secondary lateral suspension systems, in which the former contains a spring and the latter consists of a spring and a damper. Yang et al.
14
built a simplified quarter railway vehicle model (as shown in Figure 2) that ignores the node stiffness in the design of the control strategy due to the large value of the node stiffness and derived the model’s dynamic equations
14
to form equation (1). This paper used this simplified quarter model, given that it focused on impacting the damping coefficient only rather than the stiffness. The ride comfort was thus assumed to behave similarly for different values of suitable stiffness under the change of the damping coefficient. The proposed control method was then applied to the whole model to provide a more comprehensive and precise evaluation in terms of vibration attenuation ability and running safety level. The basic parameters of the passive lateral suspension system for the railway vehicle used in this study of equation (1) are provided in Table 1. Simplified quarter model of railway vehicle. Parameters of the quarter railway vehicle model.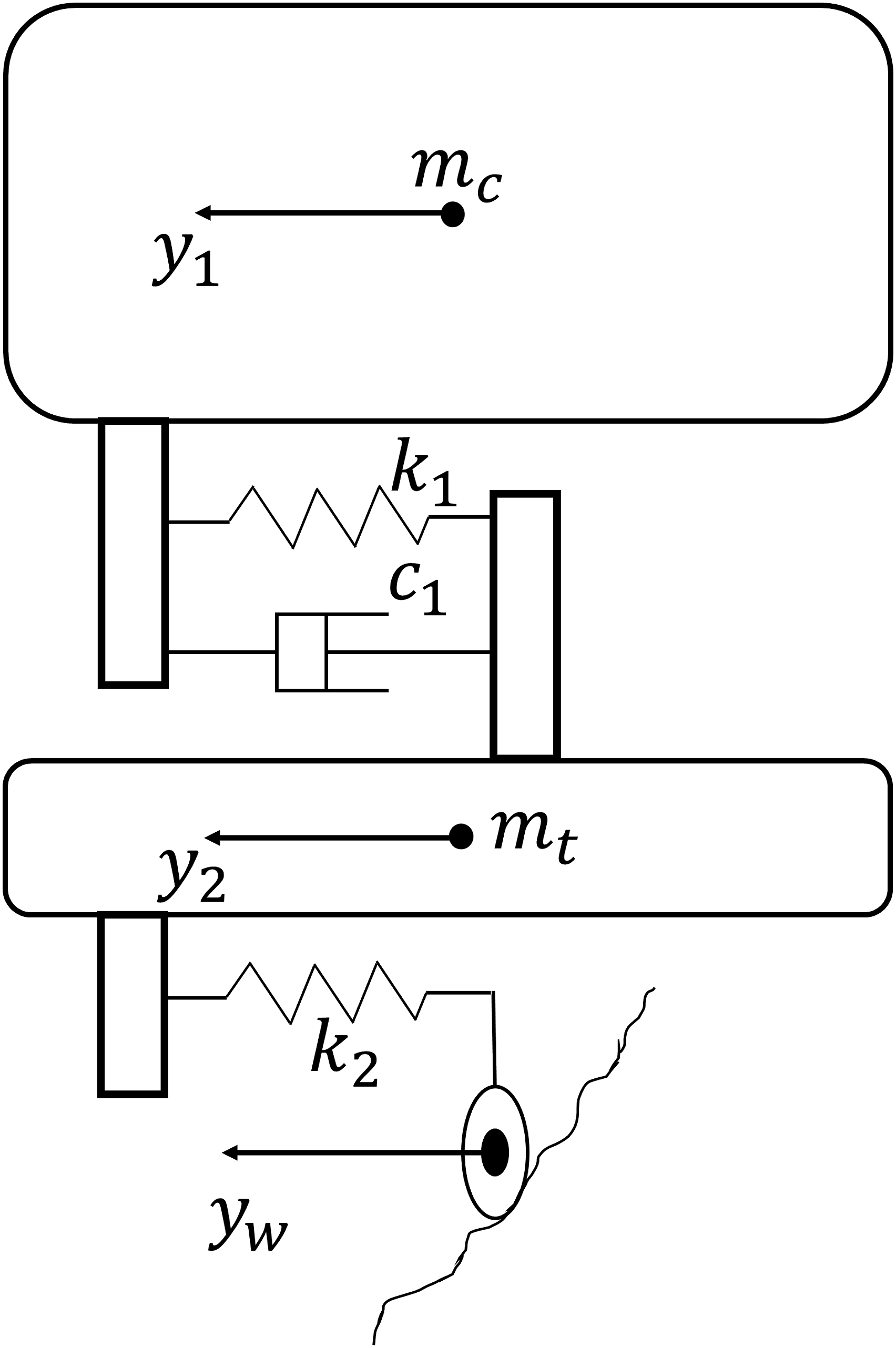


Whole railway vehicle model
Based on the preliminary results from the simplified quarter model, the hybrid control method was further evaluated in the whole railway vehicle model, which can reflect the impacts of vertical and longitude suspension systems, the running speed, and excitations in different directions (e.g., vertical, gauge, and roll excitations). This model (often referred to as a dynamic model) built in Simpack software has been used in many studies to replace the real railway vehicle, given that the simulation results from the whole railway vehicle are shown to be close to experimental results. Figure 3 shows the whole railway vehicle model, including one carbody, two bogies, and four wheelsets. They are connected by primary and secondary suspension systems, which consist of springs, air springs, rubbers, torsion bars, and dampers in the vertical, lateral, and longitude directions. Note that there are two lateral dampers: one connected between the front carbody and the front bogie, and the other connected between the back carbody and the back bogie. Each carbody, bogie frame, and wheelset in this model have six degrees of freedom (DOF) (surge, heave, sway, yaw, pitch, and roll motions), while each axle box rotating arm has one DOF (pitch), which are clearly explained in Ref. 18. The railway vehicle model on Simpack (a) full and (b) bogie.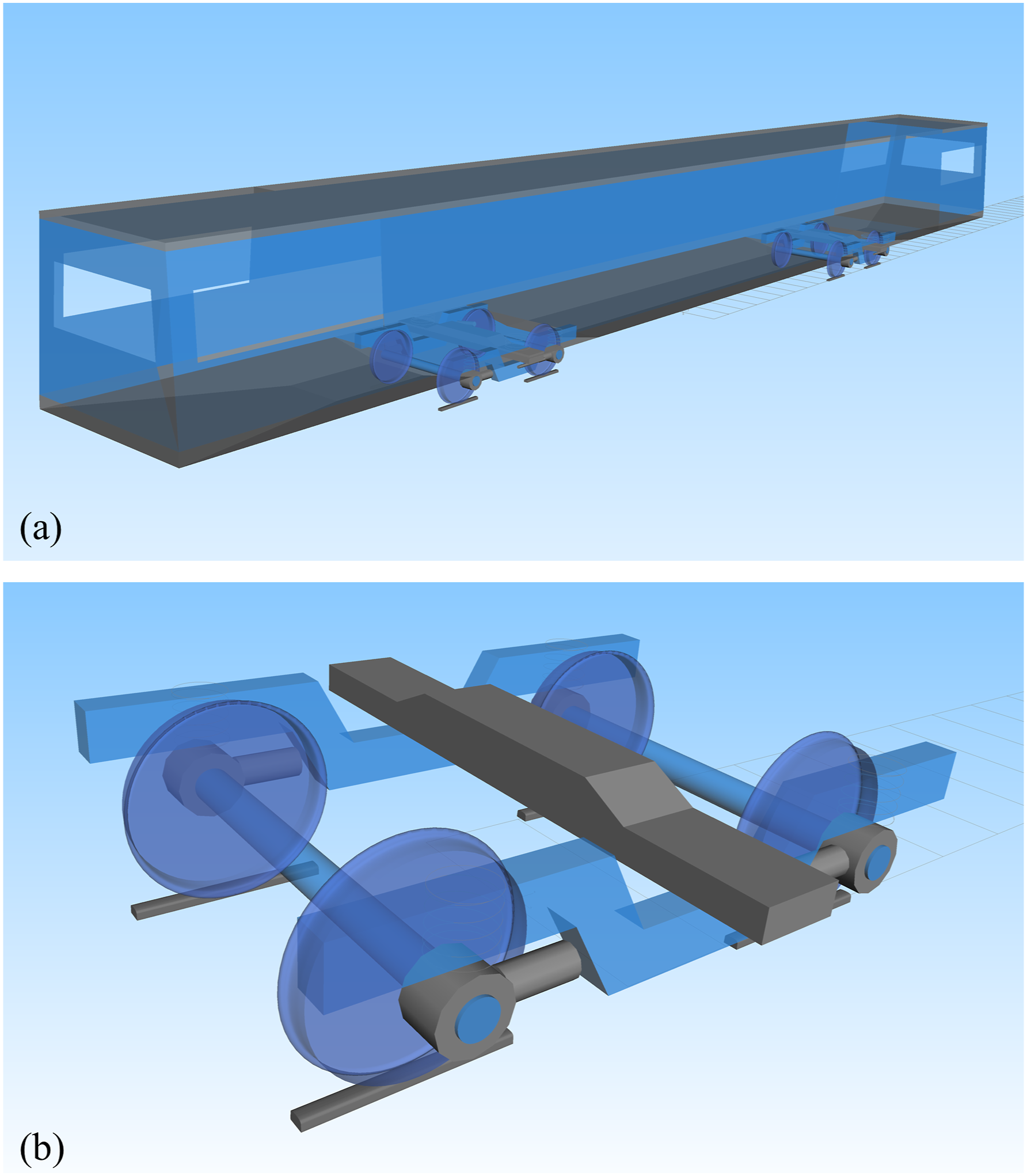
This dynamic model employed the UIC510-2 standard 20 to define the shape of the wheels, the UIC60 standard 21 to define the shape of the rails, and the UIC519 standard 22 as the basis for the connection between these two parts. In addition, the speed of the railway vehicle model was set at 80 km/h, based on the allowed speed at which it can be operated, 23 and the track was chosen as 5 km in length, which is the goal of this study, and it was assumed to be flat and straight.
Simulation condition setting
Sinusoidal function excitation
In this paper, a straight track line was used to evaluate the dynamic simulation of the train. Firstly, the sinusoidal function vibration excitation is used as the input signal for the simplified quarter and whole railway vehicle models, in which, the amplitude of vibration excitation is 0.005 m, the frequency range of the simulation is from 0.1 to 20 Hz, the simulation time is 50 s, and the step size is 0.001 s. 24
Track irregularity
Secondly, the track irregularity is also used as the input signal for the whole railway vehicle to comprehensively evaluate the vibration attenuation effectiveness of the hybrid control, which is represented by the German low-interference track irregularity. The track irregularities are featured by their power spectral densities (PSDs), which are defined using the measured data and thus reflect real-world conditions of the vibration excitation source. There are four main types of irregularities, including vertical irregularity, lateral alignment irregularity, cross-level irregularity, and gauge irregularity, which are referred to as track geometry irregularities and estimated by equations (2)–(5), respectively
18
:



Based on the standard of German low-interference track irregularities,
14
the lateral irregularities are presented in Figure 4 for the input signal of the numerical simulation problem. Track lateral irregularity with German low-interference track irregularity.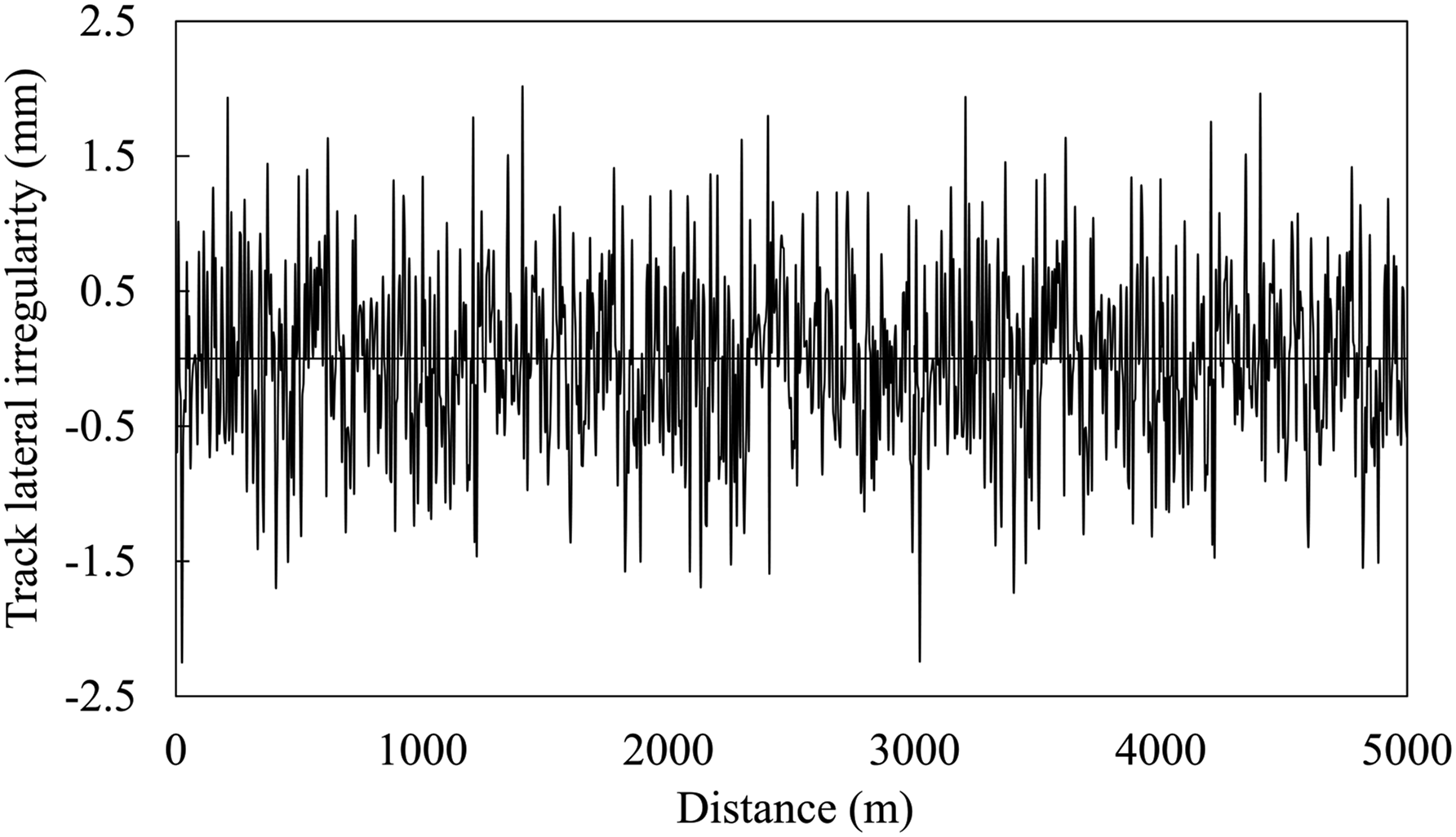
Evaluation of railway vehicle model
For the quarter model, a preliminary result of the ride comfort evaluation was measured in the acceleration index, whereas for the whole model, a more comprehensive evaluation of the proposed control theory was made with three indicators: acceleration, Sperling, and derailment.
Ride comfort
The evaluation of the ride comfort through the acceleration of the carbody is a simple well-known method; however, to evaluate more accurately the ride comfort, not only the acceleration value but also the acceleration frequency (i.e., Sperling index) of the carbody should be considered. Therefore, in this paper, the amplitude of the carbody’s acceleration and the Sperling index of the passenger for railway vehicle were measured in the whole model.
The Sperling index was determined based on the standard of the China Railway GB/T5599-2019,
14
which is shown in equation (6).

According to Ref. 14, a Sperling index of less than 2.5 is considered a standard for the ride comfort of the carbody in train operation.
Running safety
The derailment phenomenon is a serious issue in railway safety, possibly caused by various factors, such as the curve radius, track irregularities, the friction coefficient between the wheel and rail, the train speed, and so on. In this paper, the derailment coefficient is considered to evaluate the train safety level when applying the proposed hybrid control theory. This index has been described and analyzed carefully in previous studies, especially in Japan, for example, Takai et al.
25
and Ishida et al.
26
The derailment coefficient can be determined using “Nadal’s equation” (equation (8)), which is commonly used to calculate the margin against the flange-climb derailment quantitatively.
26


A derailment coefficient of 1.0 or less was chosen as the standard running safety level, following Ref. 25.
New hybrid control strategy
Defining natural frequency range of carbody as changing carbody weight
The carbody weight is defined as a total of the carbody self-load (i.e., idle) and passenger load, which is undoubtedly changeable between idle and the full load due to changes in the number of passengers at different stop stations. According to Ref. 27, the weight ratio of the full carbody load to the idle load
Equation (10) was used to determine the carbody’s natural angular frequency 
During operation, the frequency of the carbody’s vibration excitation changes from low to high under the track irregularities. Besides, the carbody’s natural frequency also changes from
Analysis of mixed SH-DV control
To demonstrate the ineffectiveness of the conventional mixed control approaches under a change in the carbody load, an example analyzing for the mixed SH-DV control is presented. In the mixed SH-DV control strategy, the excitation vibration frequency of the carbody is estimated by the acceleration and velocity function (equation (11)) and compared with the conversion coefficient c to determine the conversion status to SH or DV control.
14
Therein, c is the intersection point between SH control and DV control, defined as 
The SH and DV control strategy are implemented through determining the damping coefficients 

Figure 5 compares the carbody acceleration transmissibility at the full and quarter carbody loads. Figure 5(a) shows the improvement of the ride comfort at full load of the carbody load. The mixed SH-DV control method obtained 90% of the asymptotic effectiveness of SH and DV control. As the carbody load changed to a quarter load (Figure 5(b)), the mixed SH-DV control seemed to be less effective, approximated by 70% of the asymptotic effectiveness of SH control at low frequency and 90% of asymptotic effectiveness of DV control at high frequency. That might be due to incorrect transition point of the control state Performance of SH-DV control with fixed conversion coefficient c at two conditions of the carbody load: (a) full (b) a quarter.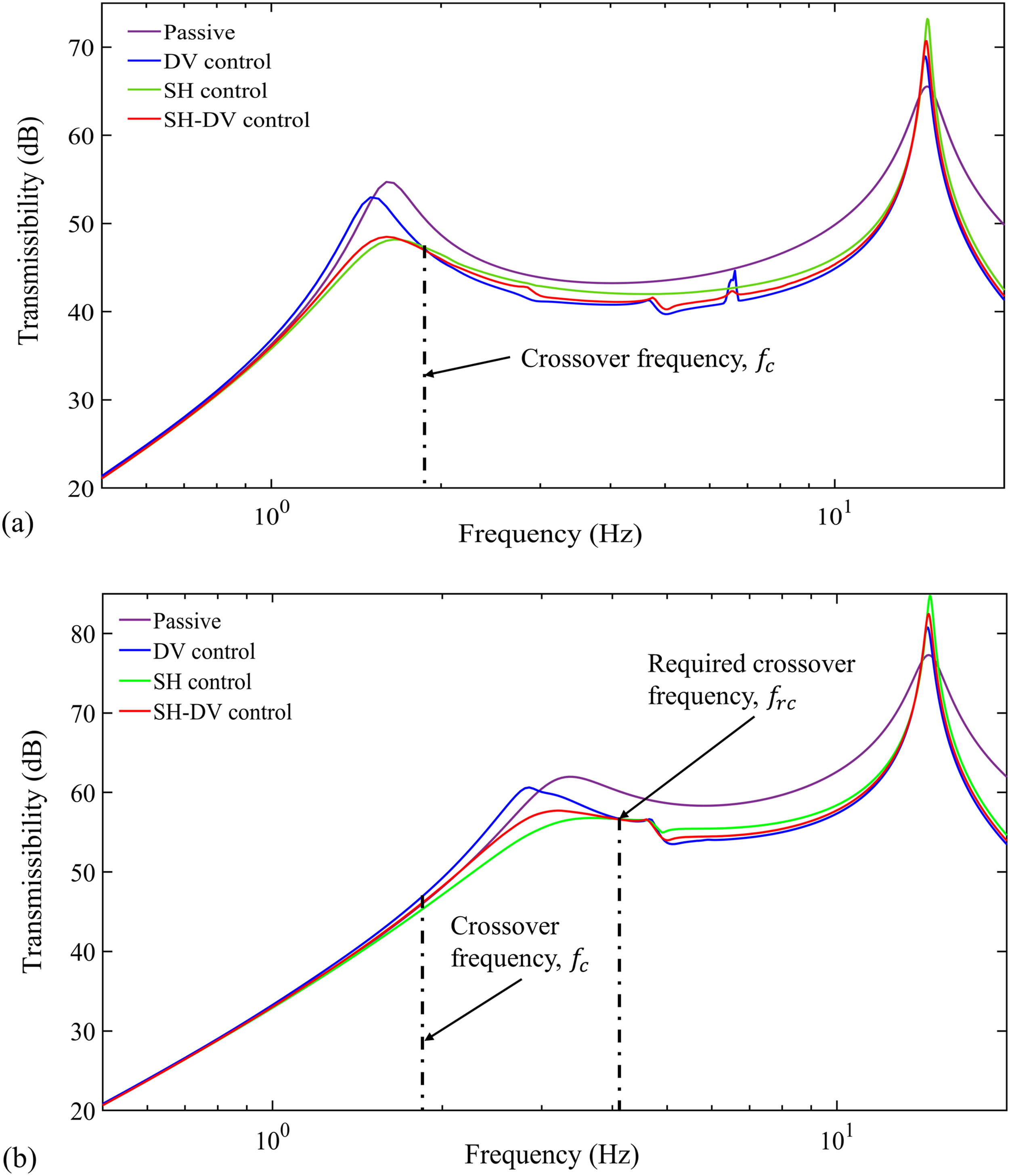
Proposed hybrid control
To overcome the drawbacks of the conventional mixed control approaches under the carbody load changes, a new hybrid SH-DV control strategy was proposed, adaptable to three specific regions of vibration excitation frequency by corresponding controls: (I) low frequency, using the SH control; (II) ineffective frequency, using the SH and DV control simultaneously; and (III) high frequency, using the DV control.
This hybrid approach ensures each control reaching its effective point in the suitable frequency region (I) and (III), while the use of the two control methods simultaneously can improve the performance under the carbody load changes (region (II)). The separation of different control areas with linear transition of control states helps to reduce the sensitivity at the control state transition points. The hybrid control strategy is clearly explained in Figure 6. Contribution coefficients under the body’s vibration frequency.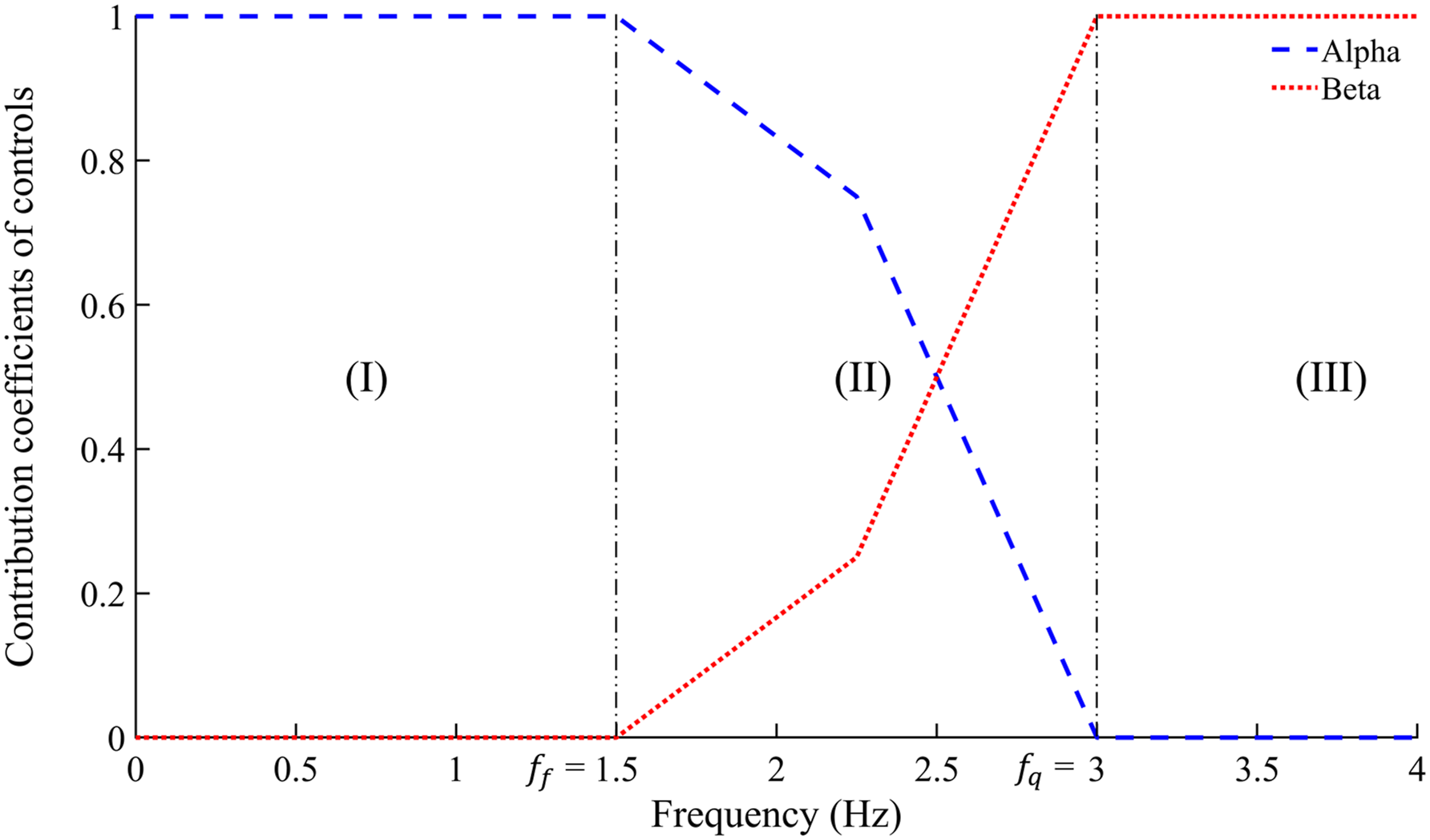
Figure 6 presents the contributions of each control type across the excitation frequency range, in which α and β are the contribution coefficients of the SH and DV control methods, respectively. The control state is converted to the SH control system when α = 1 (or β = 0) and to the DV control system when β = 1 (or α = 0). When the vibration frequency region of the carbody coincides with the natural frequency region of the body, that is, 0 < α < 1 (or 1 > β > 0), the SH and DV control systems are simultaneously active, in which the influence intensity of each control method depends on the contribution coefficients (α, β). In Figure 6, the contribution of each control type appears linear across the vibration frequency band (
Equation (14) explains the contributions made by either the SH or DV control individually or the dual SH + DV control. Therein, 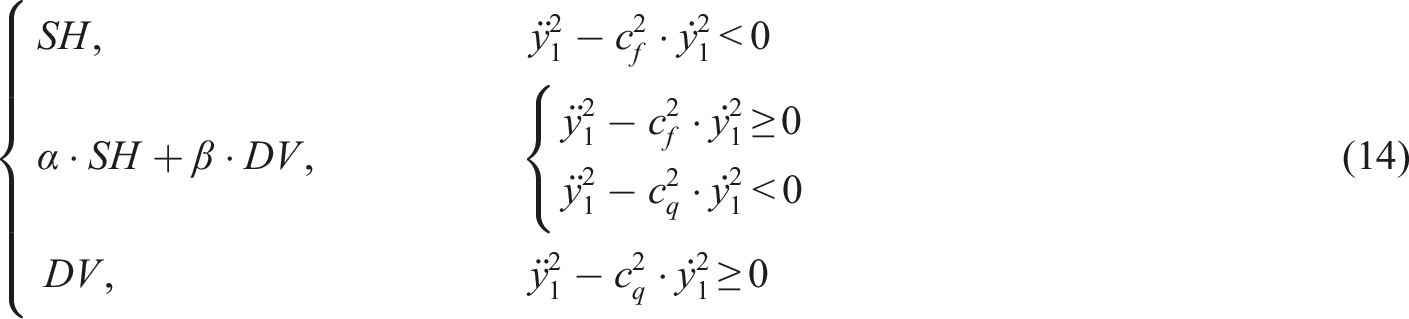
Furthermore, equation (15) defines the influence intensity of each control type by establishing values α and β. α and β are constant when the carbody’s vibration frequency is outside of the range [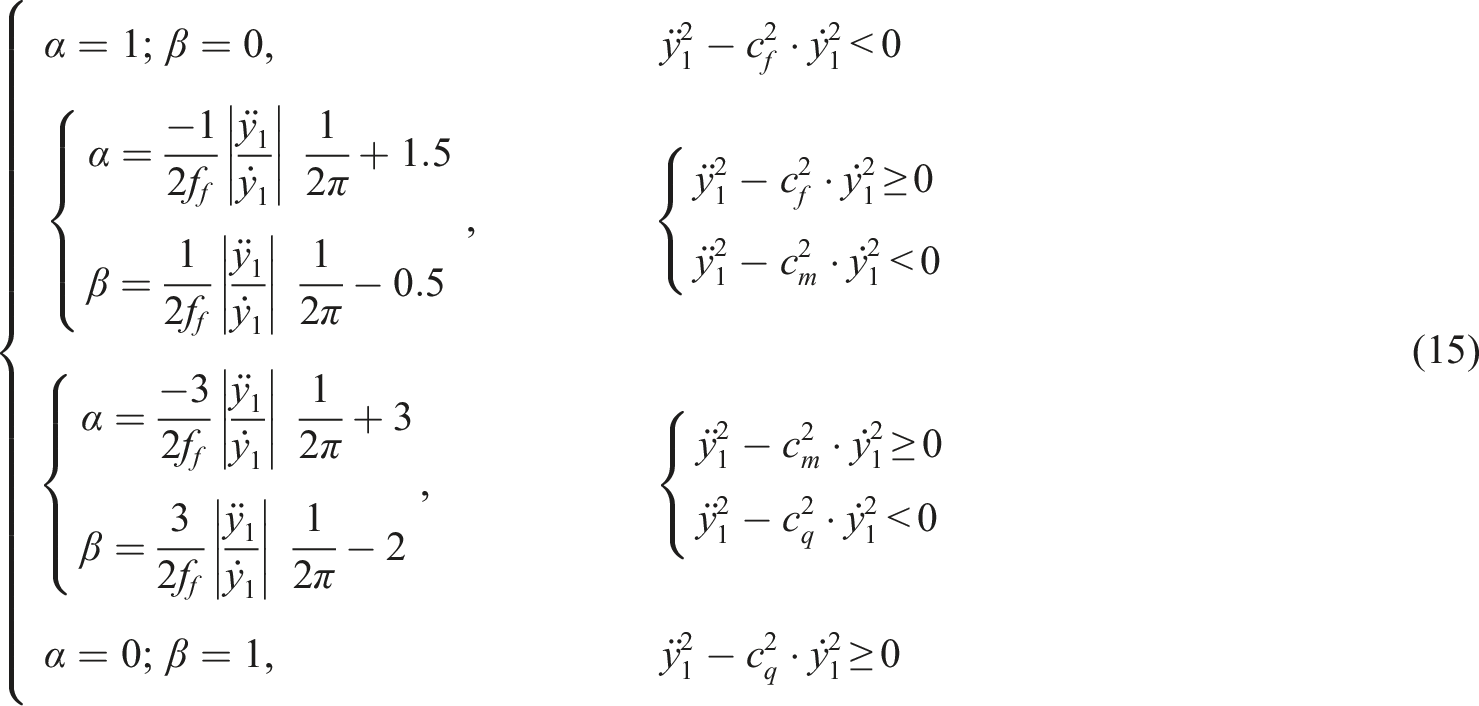
Co-simulation model
Simpack can generate a complex railway vehicle model; however, it is not a tool for control design. To overcome this limitation, Simpack and Simulink nonlinear models can be simultaneously simulated using the SIMAT (abbreviation by Simpack and Matlab) co-simulation interface, in which Simpack solves the mechanical system while Matlab/Simulink solves the control loop. For instance, Chen et al. 29 established a combination of a vehicle model on Simpack and a control model on Matlab/Simulink. In addition, other co-simulation methods have also been developed, such as VI-Rail and Matlab/Simulink 18 and UM and Matlab/Simulink. 24
In this study, a co-simulation SIMAT model was constructed (Figure 7), merging the railway vehicle model on Simpack with the hybrid control model on Simulink/Matlab. This co-simulation interface used the IPC (interface for coupling Simpack and Simulink) with a sampling period of 0.001 s and a simulation time of 50 s. The input for Simpack (i.e., the output of Simulink) was the control force for the front and back lateral dampers, whereas the output of Simpack (i.e., the input for Simulink) included the model’s displacement, velocity, and acceleration. The hybrid control model contained the SH and DV controls. It utilized the control signal (the acceleration and velocity of the body) to enable the control type, and then used the displacement, velocity, and acceleration magnitudes of the body and bogie to establish values for the front and back lateral damper forces. The co-simulation of the whole railway vehicle model.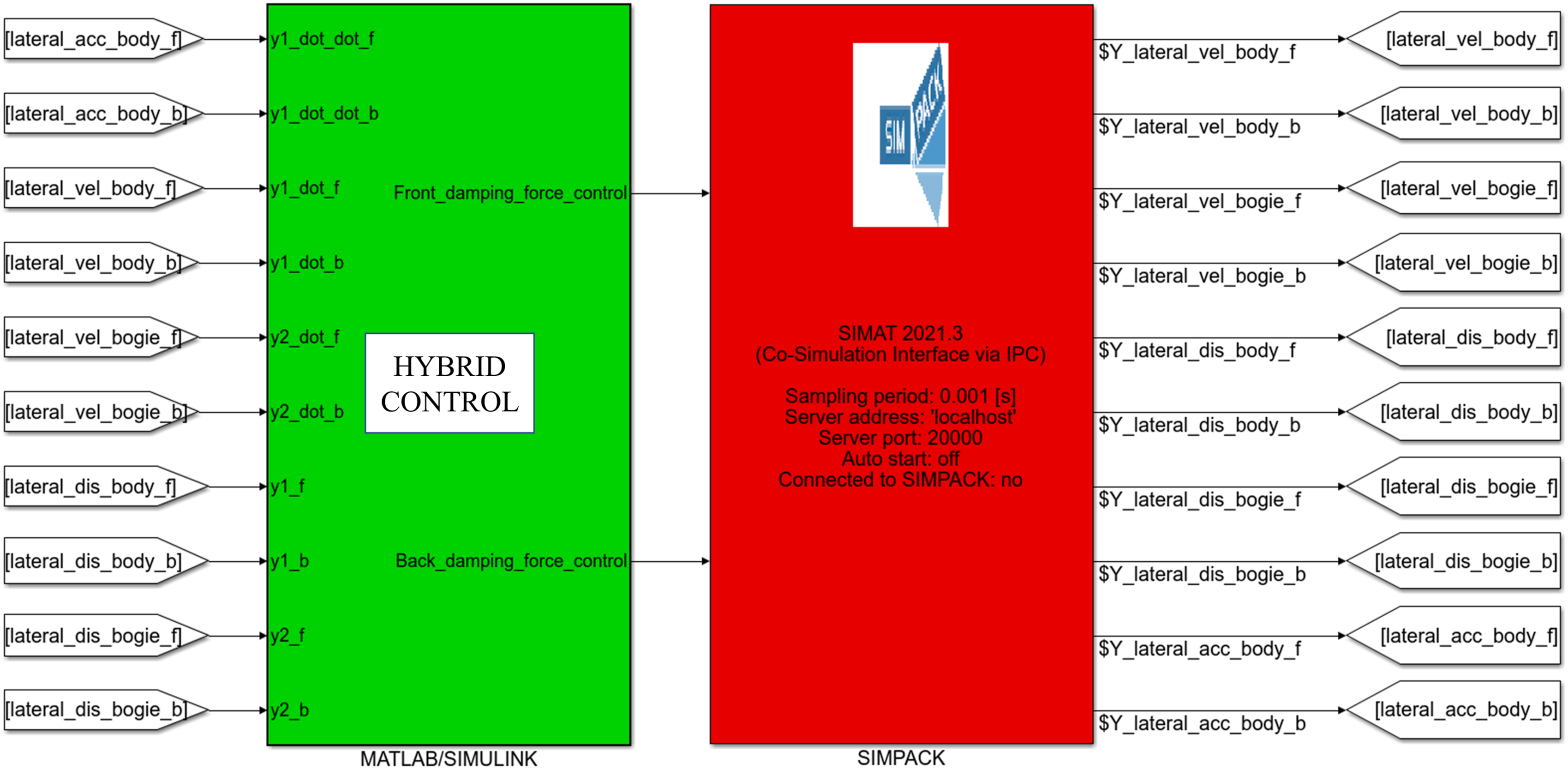
Results and discussion
We assessed the performance of the proposed hybrid control theory in comparison with two other relevant control methods: passive and mixed SH-DV controls, as follows:
Quarter railway vehicle model
Figure 8 shows preliminary results of the proposed control theory for the ride comfort measured by acceleration in the quarter railway vehicle model at different carbody loads (full, a half, and a quarter loads). Overall, the three control methods degraded the performance of the vibration attenuation as the carbody load decreased. However, in all examined scenarios of the carbody load, the hybrid control presented the highest performance compared with the passive and mixed SH-DV controls. Specifically, at full load (Figure 8(a)), the hybrid control had the same effectiveness as the SH-DV control and was better than the passive control. Specifically, the acceleration of the hybrid control was 52.2% lower than that observed in the passive control at the resonant frequency of 1.55 Hz. At half the full body load (Figure 8(b)), the hybrid control showed better performance than the two other control types. Specifically, the acceleration of the hybrid control was 4% lower than that of the SH-DV control and 48.5% lower than that of the passive control at the resonance frequency of 2.2 Hz. Especially at a quarter of full body load (Figure 8(c)), the hybrid control showed significantly higher effectiveness with a 10.3% lower acceleration than the SH-DV control at the frequency of 2.9 Hz and a 42.8% lower acceleration than the passive control at the resonance frequency of 3.25 Hz. The acceleration of the carbody with the passive, SH-DV, and hybrid controls at (a) a full load, (b) a half of full load, and (c) a quarter of full load of the carbody.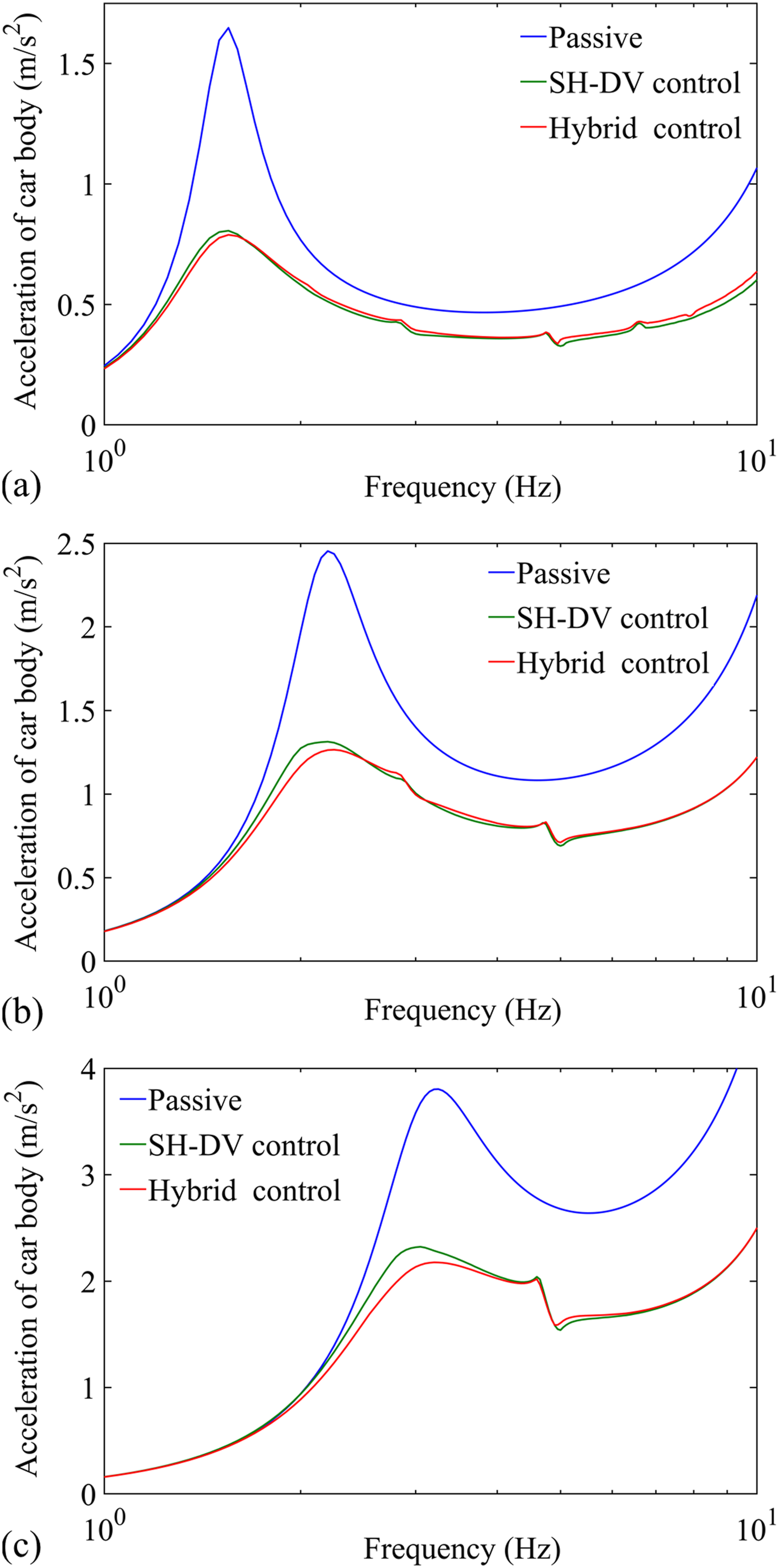
Whole railway vehicle model under a sinusoidally-formulated track excitation
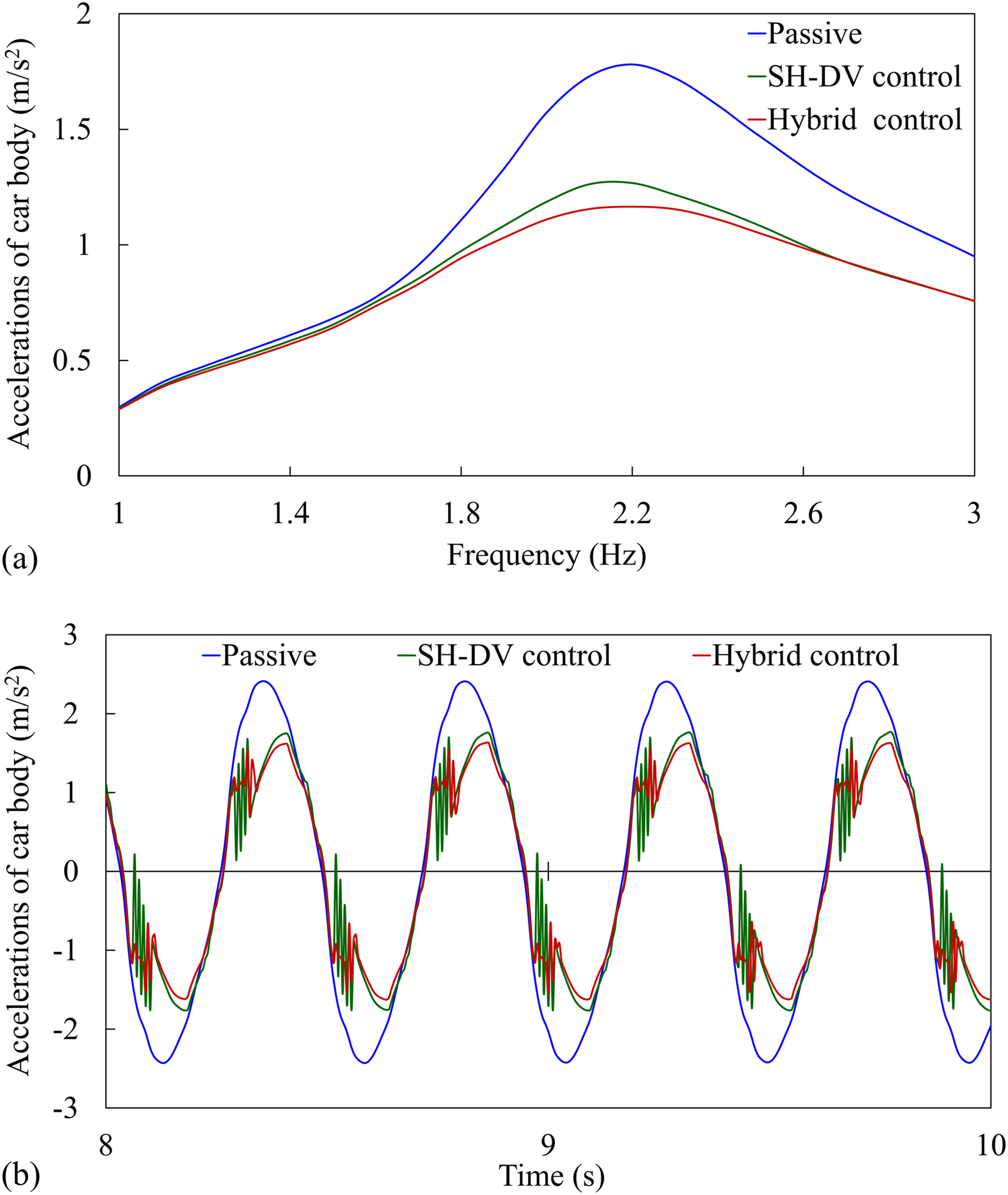
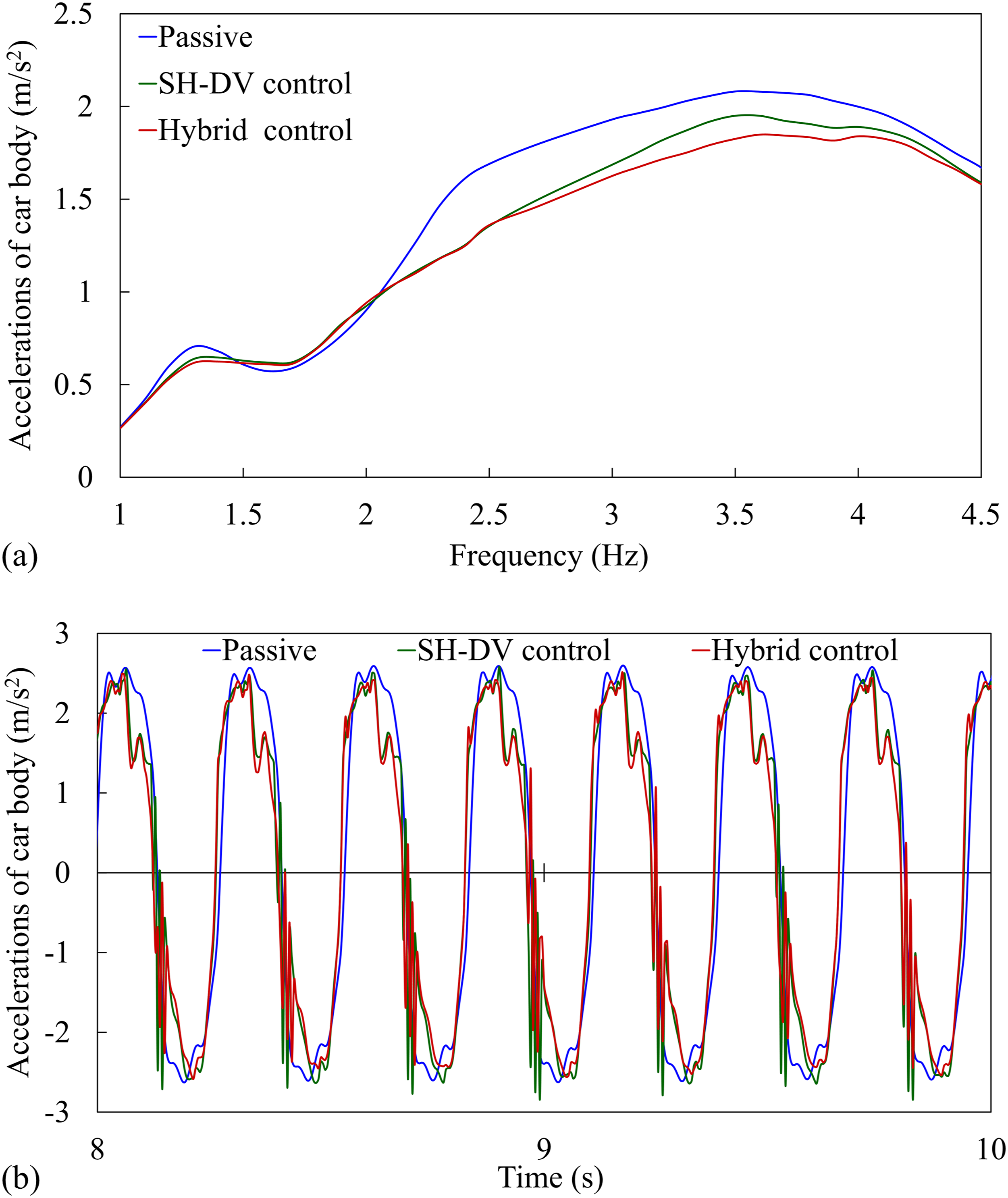
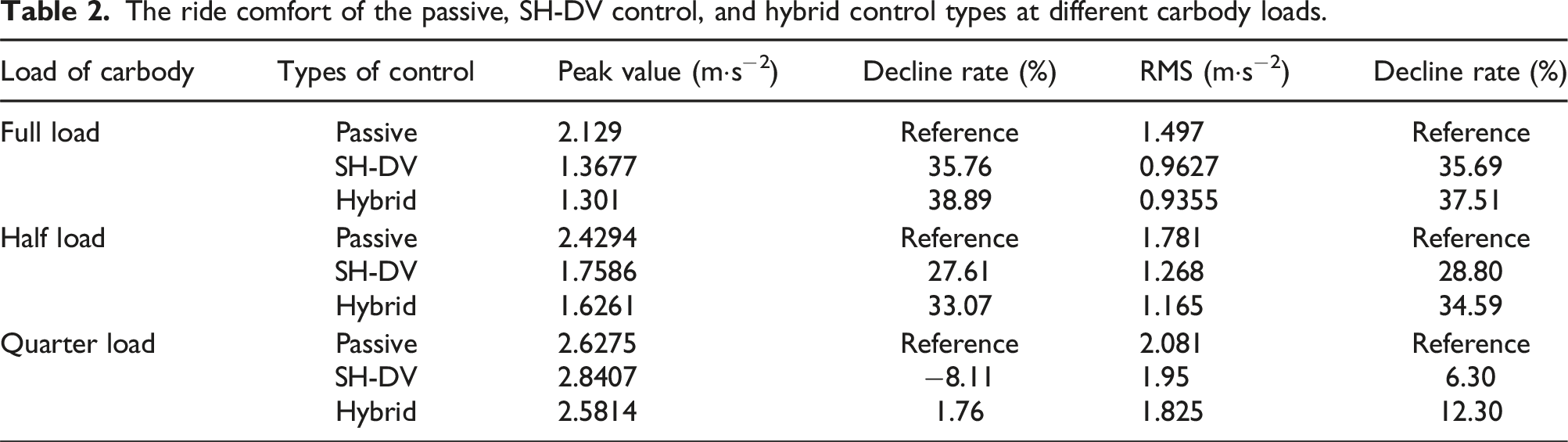
The ride comfort was assessed using acceleration index under a sinusoidally-formulated excitation track in the whole railway vehicle model at different carbody loads, as shown in Figures 9–11. Table 2 summarizes the peak and root mean squares (RMS) of the acceleration of the carbody for those scenarios of carbody loads. The acceleration of the carbody produced by the three methods in the whole model showed similar characteristics to those in the quarter model. The hybrid control presented the best ability in vibration isolation as the carbody load decreased from the full to a quarter condition. Specifically, based on the peak value of the acceleration index, the hybrid method significantly reduced the acceleration of the carbody by 38.89% and 33.07% at the full and a half of the carbody load, respectively, and slightly reduced the acceleration by 1.76% at a quarter of the carbody load, compared with the passive control. These reductions were relatively higher than those of the mixed SH-DV control (35.76%, 27.61%, and −8.11%, respectively). Given that the peak point of acceleration index might be affected by the jerk phenomenon, the RMS was also provided to compare the acceleration of the three methods in terms of overall performance over time. Those findings were also observed in the results based on the RMS of acceleration. Especially, the hybrid method significantly reduced the acceleration of the carbody by 12.30% of the acceleration at a quarter carbody load, suggesting that the hybrid control showed the best overall performance over time. The acceleration of the carbody at a full load with (a) root mean square of acceleration in frequency domain and (b) absolute of acceleration at 1.6 Hz in time domain. Acceleration of carbody at a half of full load with (a) RMS of acceleration in frequency domain and (b) absolute acceleration at 2.2 Hz in time domain. Acceleration of carbody at quarter load with (a) RMS acceleration in frequency domain and (b) absolute acceleration at 3.5 Hz in time domain. The ride comfort of the passive, SH-DV control, and hybrid control types at different carbody loads.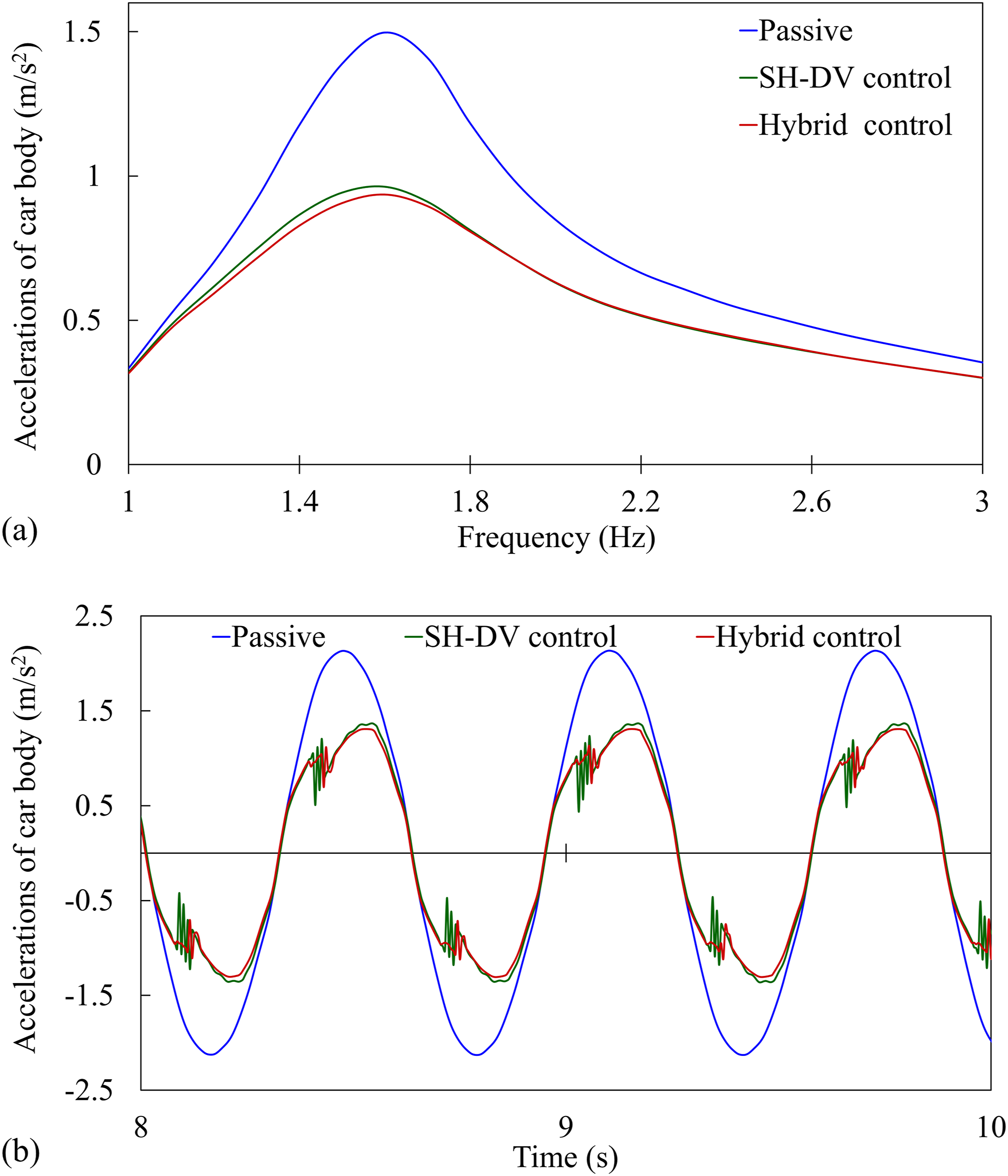
Whole railway vehicle model under the track irregularities
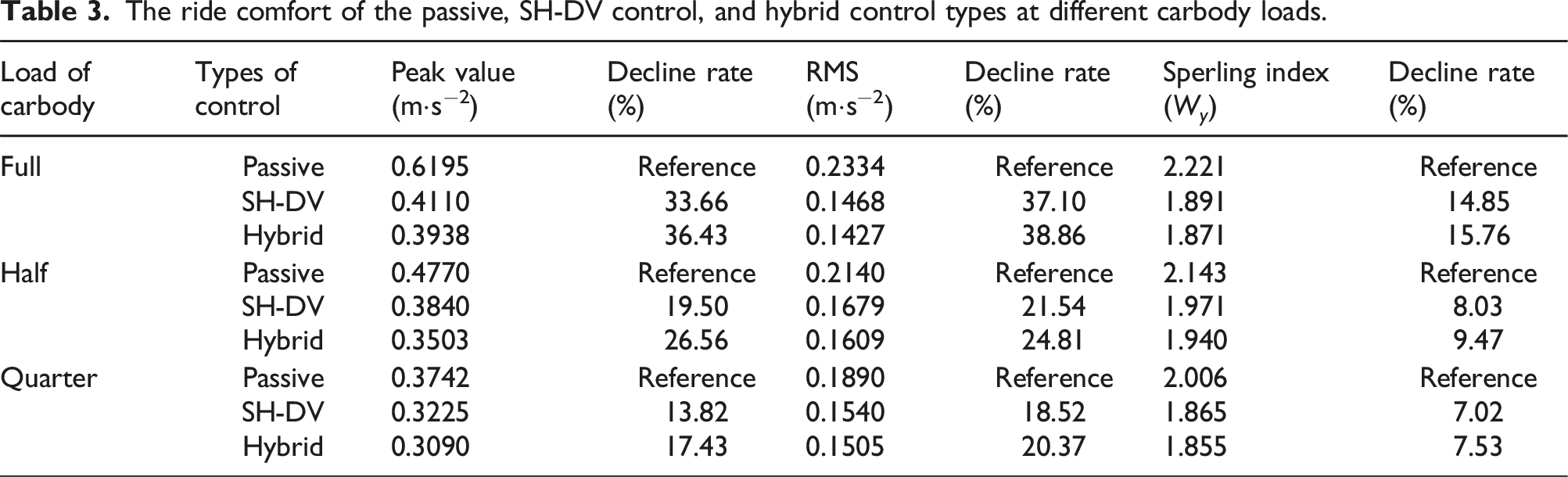
Finally, the performance of the proposed control method was evaluated more comprehensively with regard to the ride comfort of the carbody and the running safety of the train in the whole railway vehicle model under the track irregularity condition. The ride comfort of the carbody was assessed with the acceleration and Sperling indices, as shown in Figure 12 and Table 3. The results for the ride comfort of the carbody under the track irregularity condition were consistent with those under the sine-formulated vibration excitation of the track. For instance, with a quarter of the full carbody load, the hybrid control showed a lower peak value of acceleration by 17.43% relative to the passive control, which was higher than the decline rate of the SH-DV control (13.82%). The decline rates based on RMS were relatively close to those based on the peak value in all scenarios of the carbody load. Regarding the Sperling index, all three methods generated an acceptable value of Sperling index (<2.5). In particular, the mixed SH-DV and hybrid methods showed a lower Sperling index, which is favorable, than that of the passive method. The acceleration of carbody of three control types at different load conditions: (a) full, (b) half, and (c) quarter. The ride comfort of the passive, SH-DV control, and hybrid control types at different carbody loads.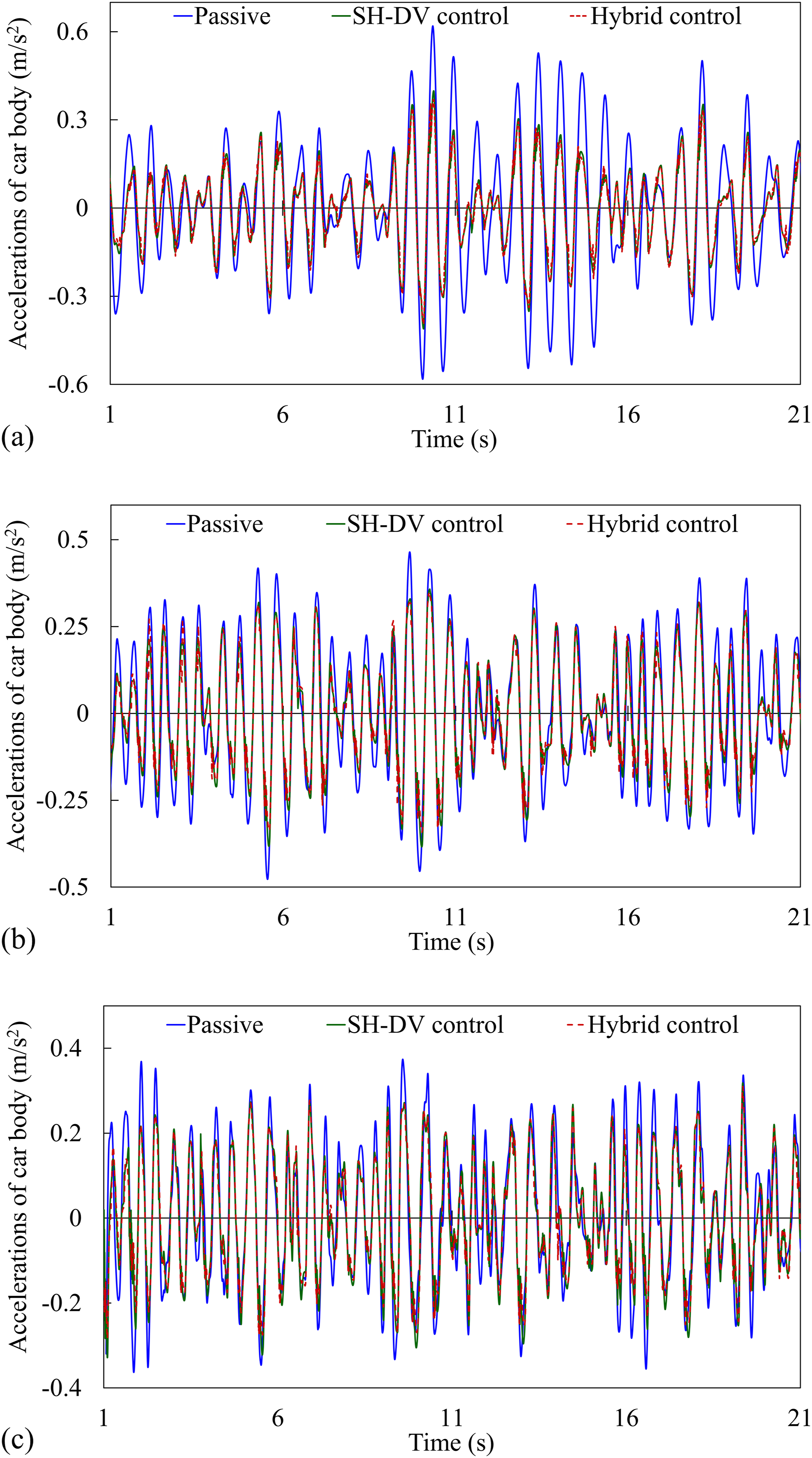
The running safety of passive, SH-DV, and hybrid control types at different carbody loads.
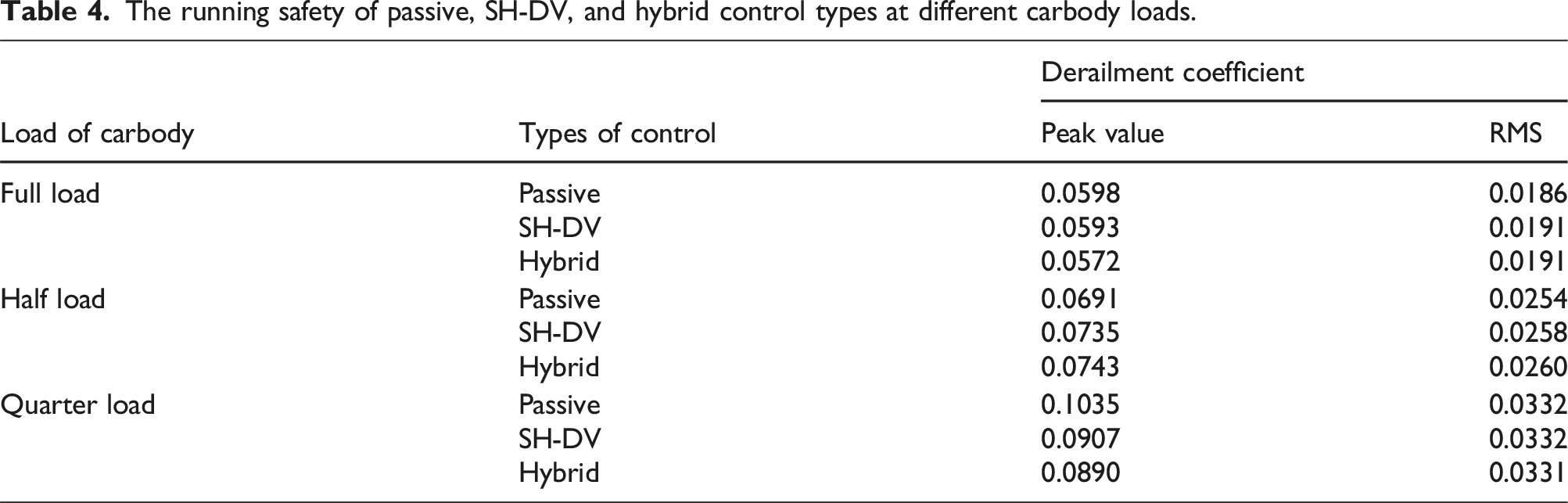
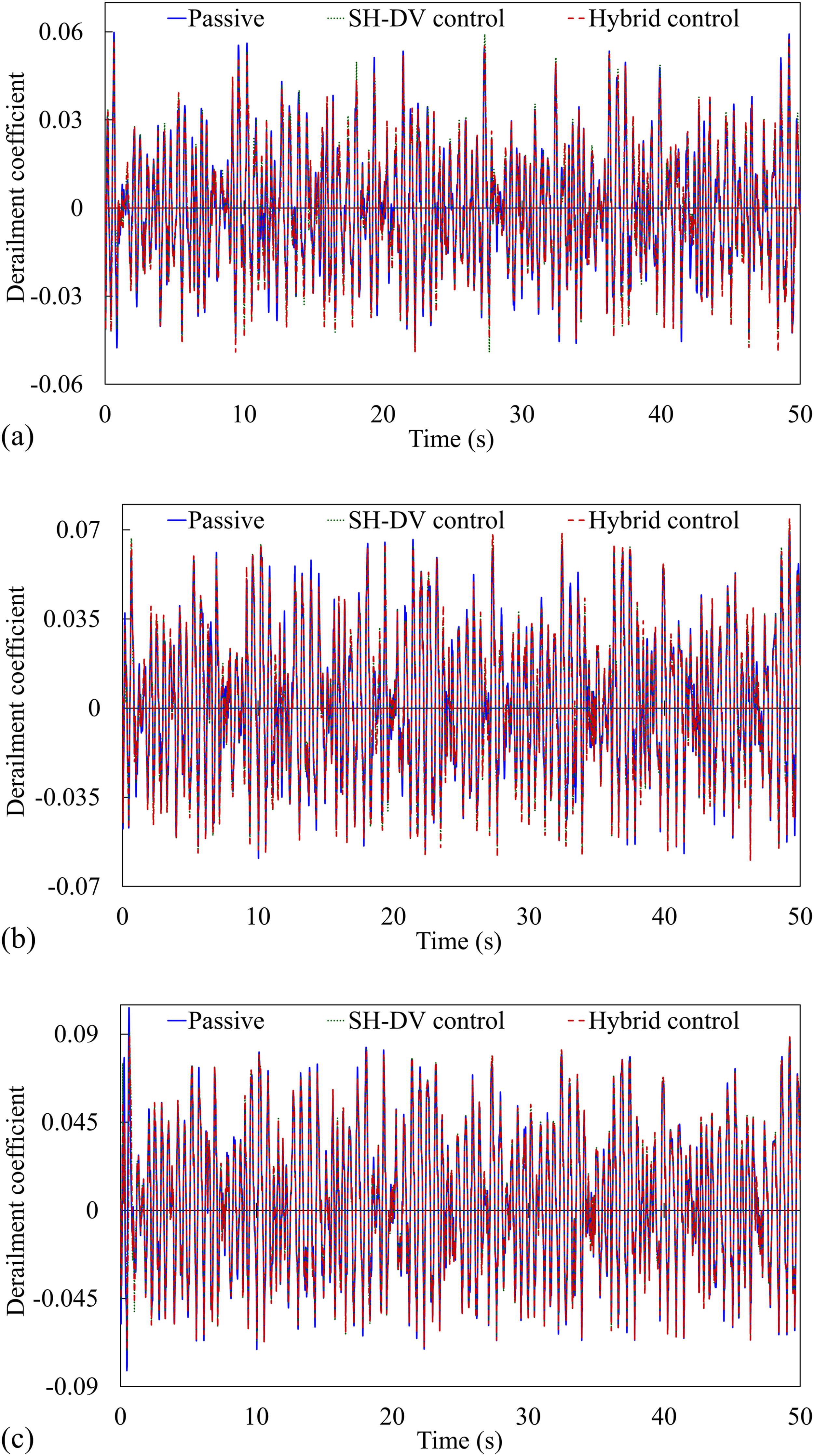
The derailment coefficients of different control types at (a) full, (b) half, and (c) quarter load of the carbody load.
The outperformance of the hybrid control over the passive and SH-DV control methods might be explained as follows: The proposed control method uses two crossover frequency points where the control algorithm converts between SH and DV control methods. As a result, it forms three regions for converting the control methods: SH, SH + DV, and DV controls, in which the SH control takes the role at a full carbody load, the DV control works most effectively at a quarter or less than a quarter load, and the SH + DV control is responsible for the case of the carbody load changes (e.g., reduce from the full to a half or a quarter load as shown in this study). Therefore, the proposed hybrid control method can adapt in response to carbody load changes and take advantage of individual control methods in their optimal conditions.
Conclusion
In this paper, we proposed a hybrid control, including SH and DV control with two transition points of control states. This control is applied to MR damper of the secondary lateral suspension system of the train. This control is demonstrated for its effectiveness in suppressing the vibration of the train body under the wide change of the car body load through numerical simulation analysis. Firstly, under the track irregularity condition, the proposed method significantly improved ride comfort with a reduction in the acceleration and Sperling indices of the carbody. In particular, the hybrid control reduced the acceleration of the carbody by 36.43%, 26.56%, and 17.43% with the carbody at full, half, and quarter loads, respectively, compared to the passive control. In terms of the Sperling index, the relative decline rate was 15.76%, 9.47%, and 7.53%, respectively. Secondly, in the whole dynamic model, the hybrid control not only has good ride comfort but also ensures the running safety of the train, similar to the mixed SH-DV control and much better than passive control. This study allows for the expansion of the running train load, which promotes economic effectiveness in the transportation field. However, as a limitation, our results have yet been verified in an experiment. Although simulative results demonstrated the effectiveness of the hybrid control, this study has yet covered some important scenarios in the real world, such as slope and curve tracks, time delay of the control system, the impacts of bad weather conditions, and wheel-rail pair wear. Those scenarios will be considered in our future research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was financially supported by Ministry of Science and Technology, Taiwan (Project Number: MOST 111-2221-E-027-125).