
Abstract
This paper proposes a novel control framework for magnetorheological (MR) seat suspension systems by integrating the Projection-Iterative-Methods-based Optimizer (PIMO) with Active Disturbance Rejection Control (ADRC). A nonlinear three-degree-of-freedom MR seat model incorporating an improved Bouc-Wen damper representation is developed. The proposed PIMO-ADRC framework utilizes PIMO to perform global optimization of ADRC parameters, enabling adaptive damping force control under dynamic road disturbances. Comparative simulation studies were conducted under ISO Class D road excitation at speeds of 1 m/s and 2 m/s. Results show that the proposed method reduces the root-mean-square (RMS) vertical acceleration of the seat to 0.510 m/s 2 at 1 m/s and 0.553 m/s 2 at 2 m/s, achieving reductions of 17.5% and 23.3%, respectively, compared to ANFIS-ADRC, and 32.1% and 39.4% compared to conventional ADRC. Furthermore, the dynamic displacement of the suspension is also minimized while maintaining robust stability under shock inputs. The PIMO-ADRC system exhibits strong adaptability, enhanced vibration attenuation, and faster convergence without manual tuning, making it a highly effective solution for semi-active suspension systems in agricultural vehicles. Moreover, the elimination of manual gain tuning by the PIMO optimizer enhances controller adaptability and practical applicability for agricultural vehicles exposed to long-term vibration environments.
Introduction
Drivers of agricultural vehicles (e.g., farm trucks, utility vehicles, and specialized agricultural machinery) are exposed to prolonged vibrations due to uneven terrain. These vibrations pose significant health risks, leading to reduced alertness, fatigue, and impaired driving performance. Moreover, long-term exposure to vibration has been associated with various health issues, including lower back pain, spinal discomfort, and other musculoskeletal disorders.1–4 To mitigate the risks posed by prolonged vibration exposure, various seat suspension systems have been developed, including passive suspensions,5,6 semi-active suspensions,7,8 and active suspensions.9–11 However, active suspensions are limited in agricultural applications due to their complexity and high cost, which conflict with the cost-sensitive nature of agricultural vehicle design. As a result, passive and semi-active seat suspension systems remain the predominant approaches. Passive seat suspension systems are well known for their simplicity and reliability and have historically dominated the seat suspension market. However, they lack adaptability to varying road conditions and complex disturbances, particularly in off-road and specialized agricultural vehicles, limiting their effectiveness in enhancing ride comfort and safety. Semi-active seat suspension systems have emerged as a promising alternative, striking a balance between the simplicity of passive systems and the adaptability of active systems.12,13
MR dampers, as a core component of semi-active control systems, exhibit significant potential in seat vibration isolation and human body vibration attenuation applications. Notably, with increasing demand for enhanced seating comfort, the importance of ride comfort and safety—closely linked to seat suspension systems—has become more prominent.14,15 These systems employ intelligent control strategies to adjust damping force in real time according to driving conditions, thereby enhancing ride comfort and handling stability without the high energy demands of active suspensions. However, in shear mode, the damping force–velocity curve of MR dampers exhibits asymmetric hysteresis. This nonlinear hysteretic behavior results in response lag when traditional control methods (e.g., sliding mode control, fuzzy control, and adaptive control) are employed. Although advanced control methods such as ADRC can partially compensate for disturbances and response delays, their fixed parameters hinder optimal disturbance rejection performance.16,17 Therefore, dynamically optimizing key controller parameters remains a critical bottleneck in enhancing the vibration damping performance of MR dampers.
In recent years, various intelligent optimization algorithms have been introduced into semi-active suspension control systems to enhance adaptability and control accuracy. Swarm-based algorithms such as Particle Swarm Optimization (PSO), 18 Genetic Algorithm (GA), 19 and Crow Search Algorithm (CSA) 20 have been widely used for MR damper modeling and controller tuning due to their simplicity and global search capability. Several enhanced metaheuristics have been developed to overcome premature convergence and improve robustness. For instance, Li et al. 21 employed an Extended African Vulture Optimization Algorithm (EAVOA) to optimize suspension parameters under stochastic road conditions, achieving faster convergence and smoother damping response. Zhan et al. 22 proposed a proximal policy optimization algorithm integrated with neural ordinary differential equations (PPO-NODE) to address strong nonlinearities and time-varying characteristics in MR semi-active suspensions. These studies highlight the growing trend of coupling evolutionary optimization with adaptive control to improve vibration attenuation.
However, most of these algorithms focus primarily on improving convergence characteristics or controller parameter optimization, while their integration with ADRC remains limited. Existing ADRC-enhancement approaches such as ANFIS-ADRC 23 and Fuzzy-ADRC 24 still rely on fixed parameter structures or manual tuning, restricting their adaptability under varying road excitations and uncertain system dynamics.
Although significant progress has been made in integrating intelligent optimization algorithms with control strategies for seat suspensions, most research has focused either on improving conventional control algorithms or combining them with swarm-based optimizers for intelligent multimodal damping control. To the best of our knowledge, very few studies have explored the real-time optimization of controller output signals in conjunction with dynamic damping control strategies to suppress seat suspension vibrations and enhance driver comfort. This study is dedicated to addressing this research gap and contributes to the field in several key aspects. (1) A novel PIMO-ADRC control framework is developed for MR seat suspension systems, in which the PIMO dynamically tunes the parameters of ADRC, achieving real-time adaptive vibration suppression without manual gain adjustment. (2) A nonlinear 3-DOF seat suspension model incorporating an improved Bouc-Wen MR damper is established, and a composite performance index—combining seat acceleration, suspension deflection, and control effort—is formulated to guide multi-objective controller optimization under realistic road excitations. (3) Extensive simulation studies under ISO Class D road conditions demonstrate that the proposed method outperforms traditional ADRC and ANFIS-ADRC controllers, achieving up to 39.4% reduction in RMS seat acceleration and enhanced robustness against dynamic disturbances at varying speeds.
In contrast, the present study introduces a PIMO that adaptively adjusts the ADRC parameters in real time without manual intervention. The PIMO framework maintains constraint feasibility during iteration and enables stable convergence even in strongly nonlinear MR damper systems. This hybrid design allows the ADRC to achieve automatic parameter adaptation and disturbance rejection under multi-condition agricultural vehicle environments.
Dynamic model of the semi-active seat suspension
Tractor seat suspension model
Figure 1 illustrates a three-degree-of-freedom (3-DOF) lumped-parameter model designed to characterize the dynamic behavior of the seat suspension system equipped with a MR damper. In this model, 3-DOF “human-seat” model.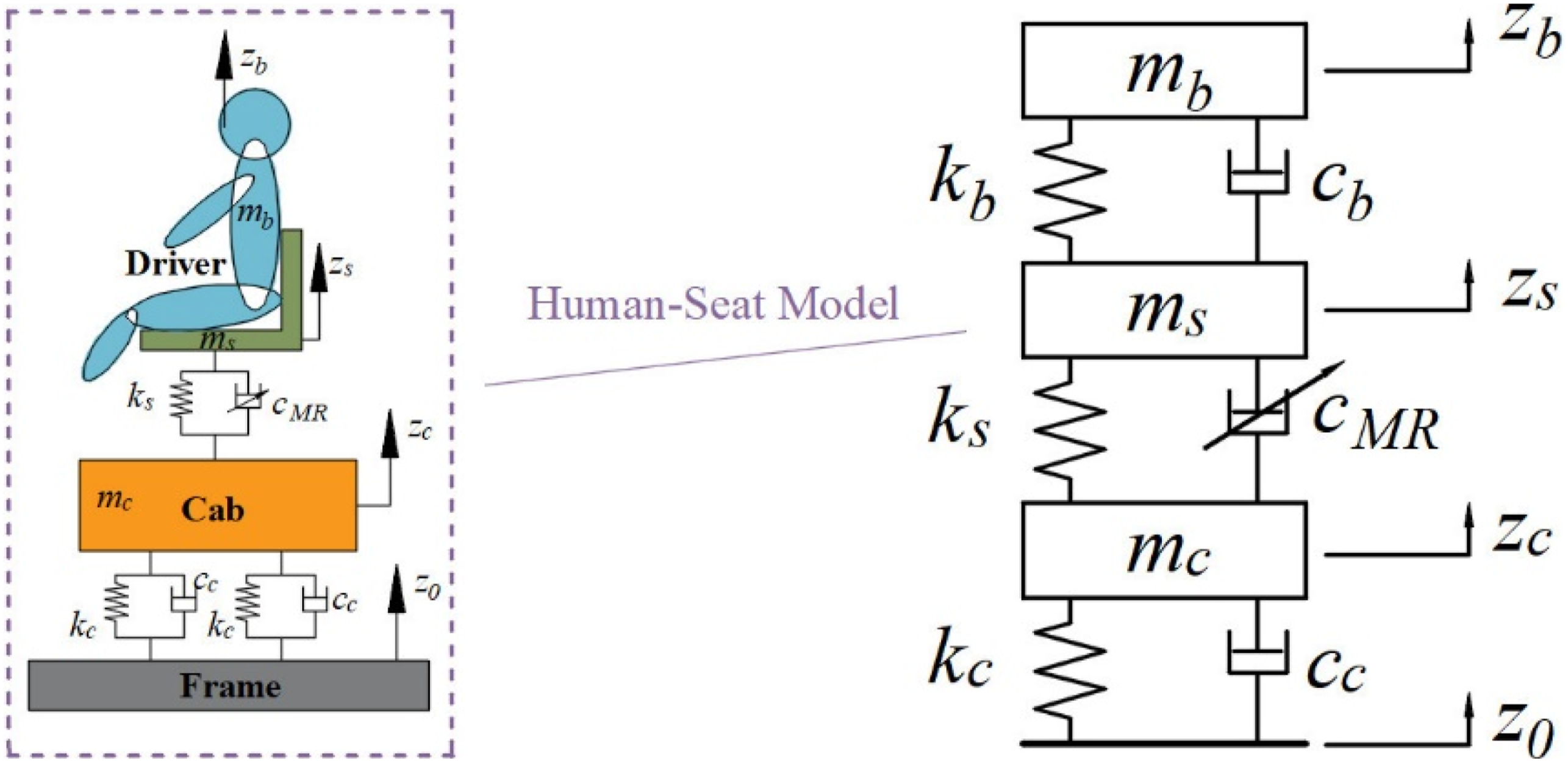
Based on Newtonian mechanics, the dynamic equations governing the 3-DOF seat suspension system are formulated as follows inequation (1):

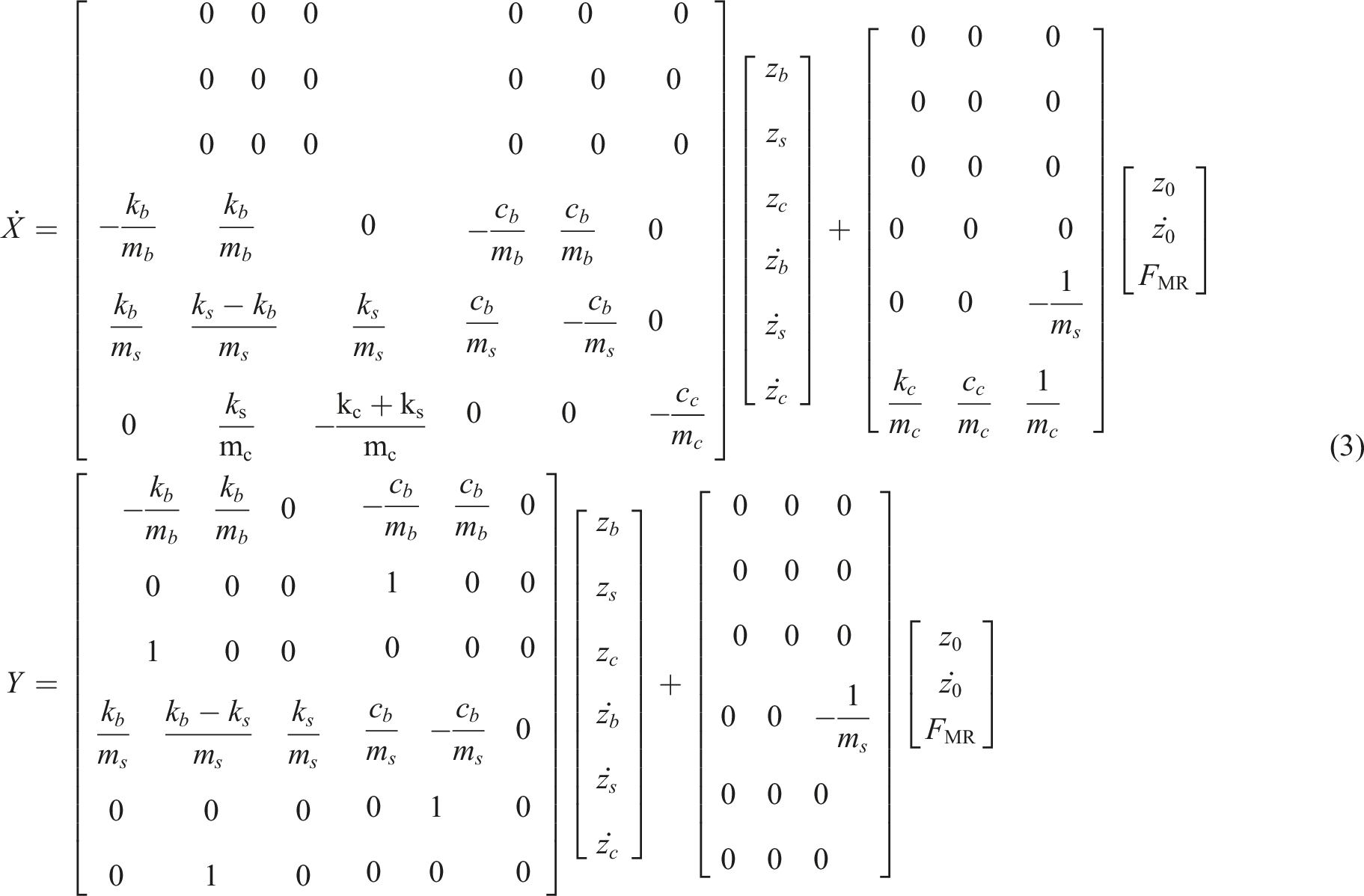
To facilitate controller design and system simulation, the equations of motion are converted into a state-space representation, as shown in equation (2):

Improved Bouc-Wen model for MR dampers
Accurate mathematical modeling of MR dampers is essential for ensuring realistic system dynamics simulations. The Bouc-Wen model is widely adopted for its ability to characterize the nonlinear hysteresis behavior of MR dampers, particularly the relationship between relative displacement, velocity, and damping force. Thus, it has gained widespread application. While the conventional Bouc-Wen model comprises a spring, a viscous damper, and a hysteresis element arranged in parallel, an improved version introduces an additional spring and damper to enhance modeling accuracy and flexibility. In this study, the improved Bouc-Wen model is employed to represent the forward dynamic behavior of the MR damper, capturing its nonlinear and rate-dependent response characteristics, and its structure is shown in Figure 2. Schematic of the improved Bouc-Wen model structure.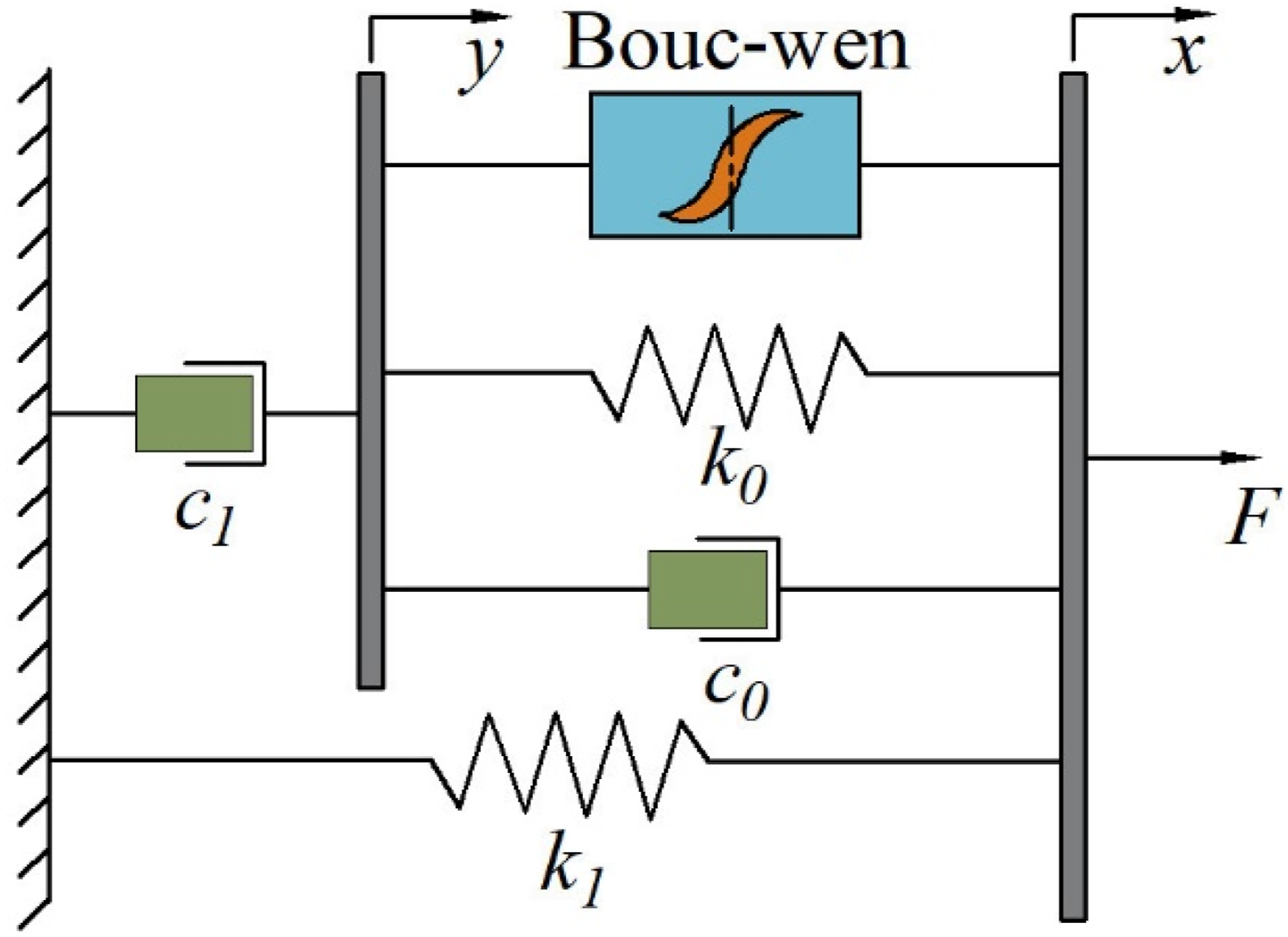
Experimental tests were performed using an electro-hydraulic servo fatigue testing system to evaluate the force–velocity and force–displacement characteristics of the MR damper, as shown in Figure 3. Damping characteristic test of the MR damper.
The improved Bouc-Wen model can effectively fit the relationship between the output damping force of the MR damper and the relative displacement and velocity of the piston. The damping force is expressed as follows:

The improved Bouc-Wen model is built in Simulink, and the constructed model can be obtained from equation (4) as shown in Figure 4. Simulation model of the improved Bouc-Wen model.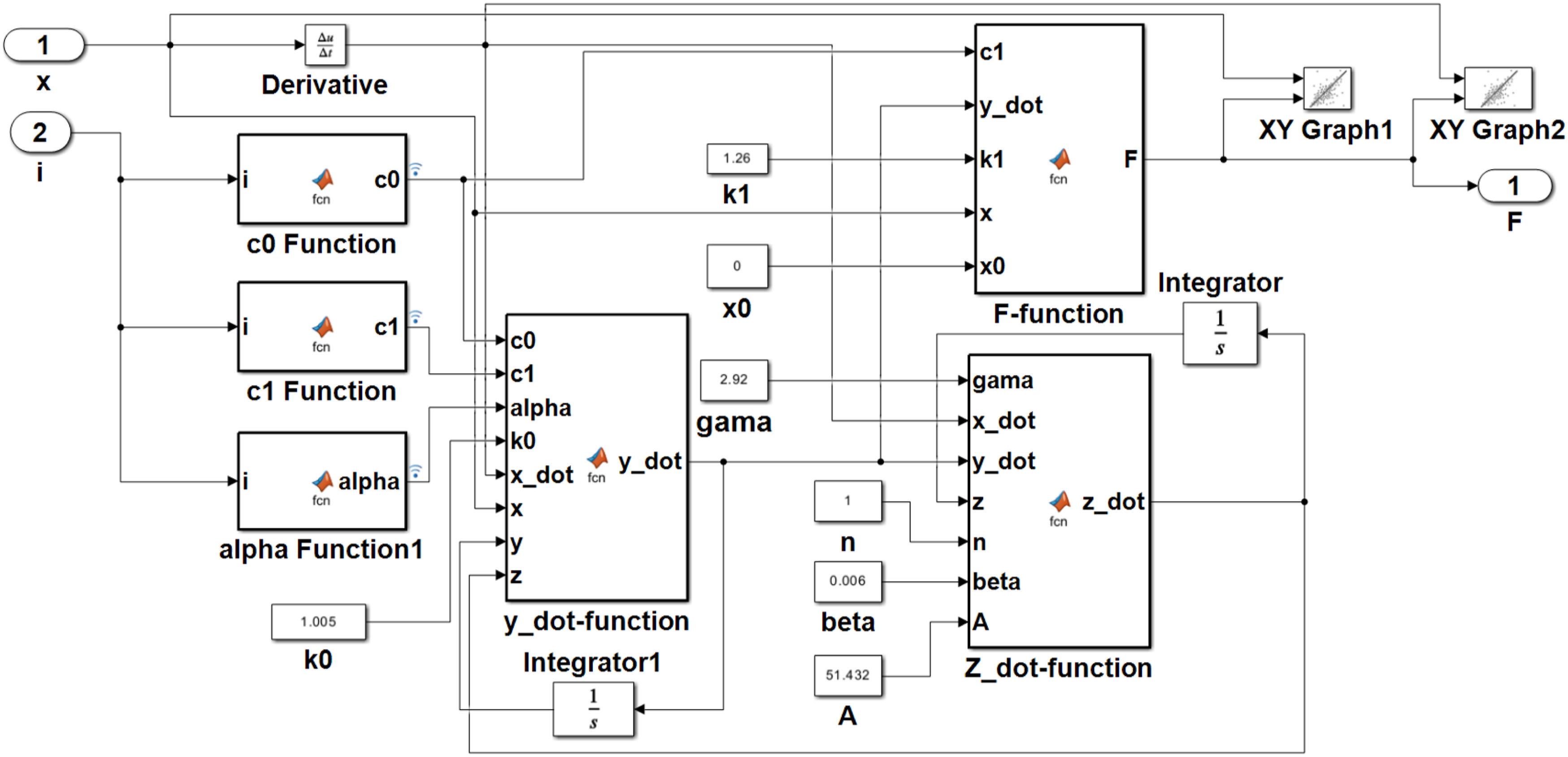
The improved Bouc-Wen model incorporates eight unknown parameters. While conventional identification methods such as Genetic Algorithms and least squares exist, they often entail computationally intensive procedures. Consequently, this study employs the Simulink Design Optimization toolbox for parameter identification. Measured piston relative displacement, velocity, and current serve as model inputs, with damping force designated as the output. Model predictions are subsequently compared against experimental results.
Improved Bouc-Wen model parameters.
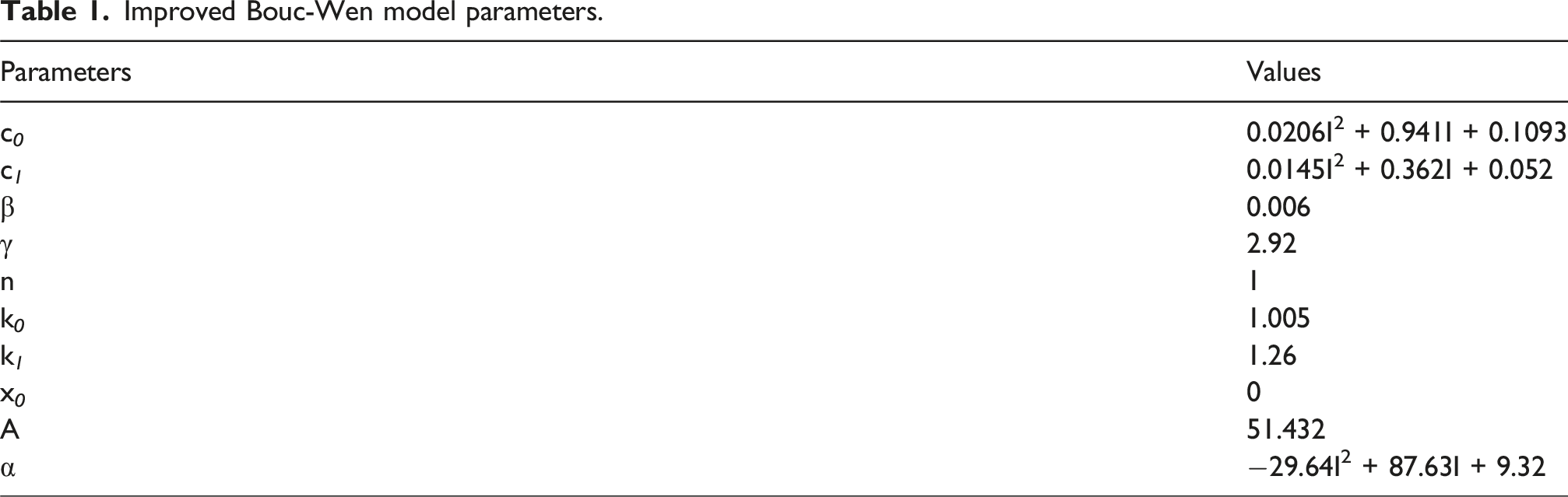
The parameter identification results were systematically validated through comparative analysis with experimental data acquired under 2 Hz excitation with 15 mm amplitude, as illustrated in Figure 5. Comparison between model simulations and experimental data for MR damper characteristics under 2 Hz excitation.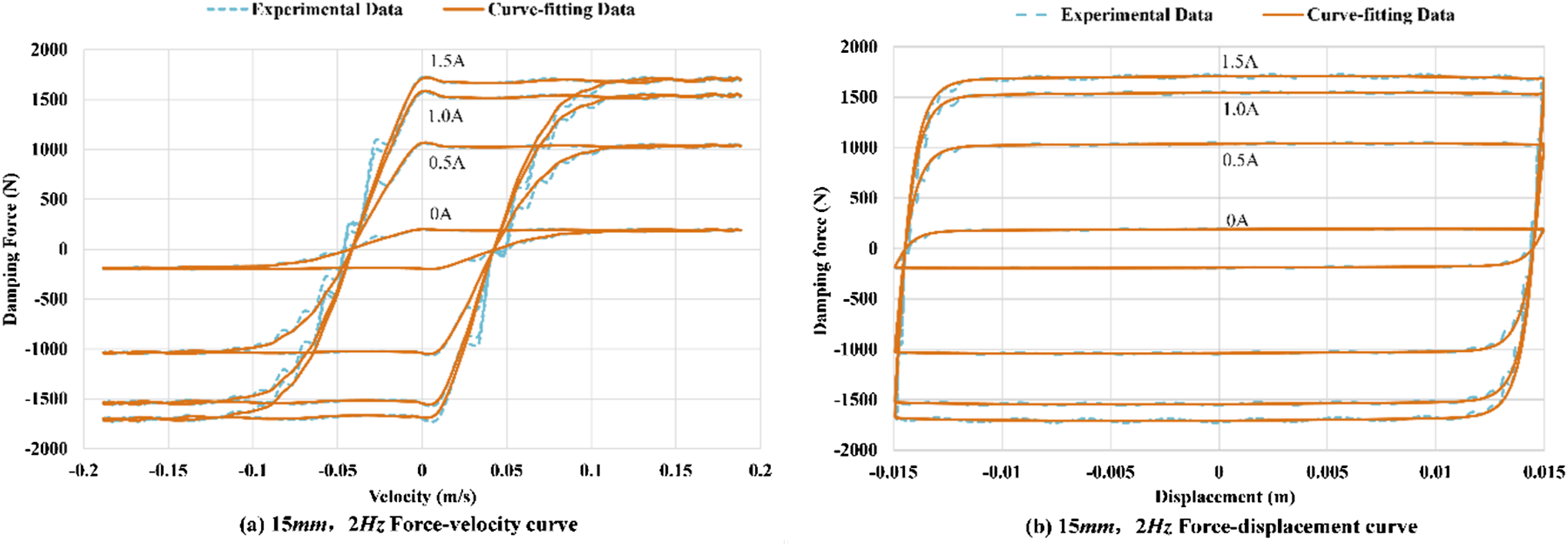
Figure 5 illustrates the comparison between the experimental results (solid line) and the model predictions (dashed line). From the above figure, it can be intuitively seen that the curve obtained from the parameter fitting using the improved Bouc-Wen model applied Simulink parameter identification is basically consistent with the curve obtained from the damper characteristic test, and the fitting effect is good.
Design of PIMO
The PIMO combines population-based stochastic search with projection operators to ensure feasibility and accelerate convergence. Unlike conventional metaheuristics that may violate constraints or stagnate in local optima, PIMO continuously projects candidate solutions onto the feasible region, thereby maintaining validity during optimization. The detailed algorithmic principles are reported by Yu et al. (2025) 25 and are not repeated here. Instead, this section highlights the operators most relevant to our PIMO-ADRC framework.
Figure 6 summarizes the execution procedure of PIMO, where four projection-based operators are sequentially employed in each iteration. The corresponding mathematical expressions are selectively retained to emphasize the operators directly integrated with ADRC parameter tuning. • Residual-guided projection (RGP): This operator uses squared residuals to guide projections toward feasible solutions with smaller errors, as expressed in Equation (5). • Gradient-based projection update: By incorporating Jacobian information, projection updates achieve higher accuracy, as shown in Equation (6). • Double random projection (DRP): Stochastic projections based on two randomly selected individuals enhance exploration. Its update rules are given in equations (7)–(9). • Weighted random projection update (WRPU): Candidate positions are refined by weighted combinations of previous projections (equations (10) and (11)). • Lévy flight-guided projection (LFGP): Occasional long-distance jumps diversify the search and prevent premature convergence, as formulated in equation (12). Flowchart of the PIMO.








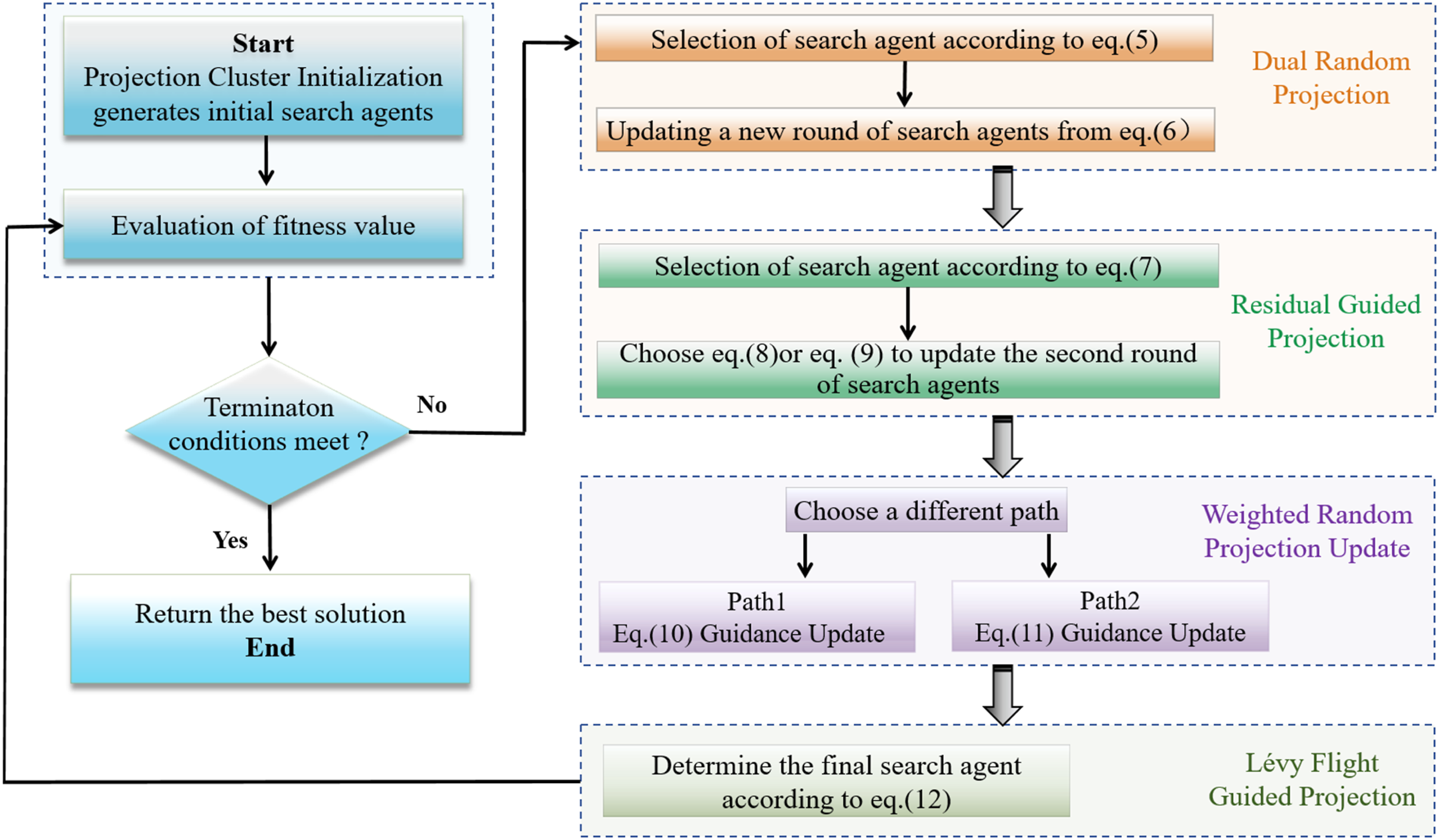
Together, these projection-based mechanisms enable PIMO to maintain both feasibility and diversity, while efficiently converging toward optimal ADRC parameter settings. By embedding the ADRC design equations (equations (5)–(12)) into the flow shown in Figure 6, the optimizer directly links controller performance indices with parameter updates. This integration ensures that PIMO not only respects system constraints but also accelerates the search for robust ADRC gains in the MR seat suspension system.
Integrated PIMO-ADRC framework for MR seat suspension
ADRC controller design
ADRC is a robust control framework pioneered by J. Han,
26
designed to handle system uncertainties and external disturbances in real time. Unlike classical PID control, which requires an accurate model or disturbance assumptions, ADRC actively estimates and eliminates disturbances during operation. The standard ADRC architecture consists of three main components
27
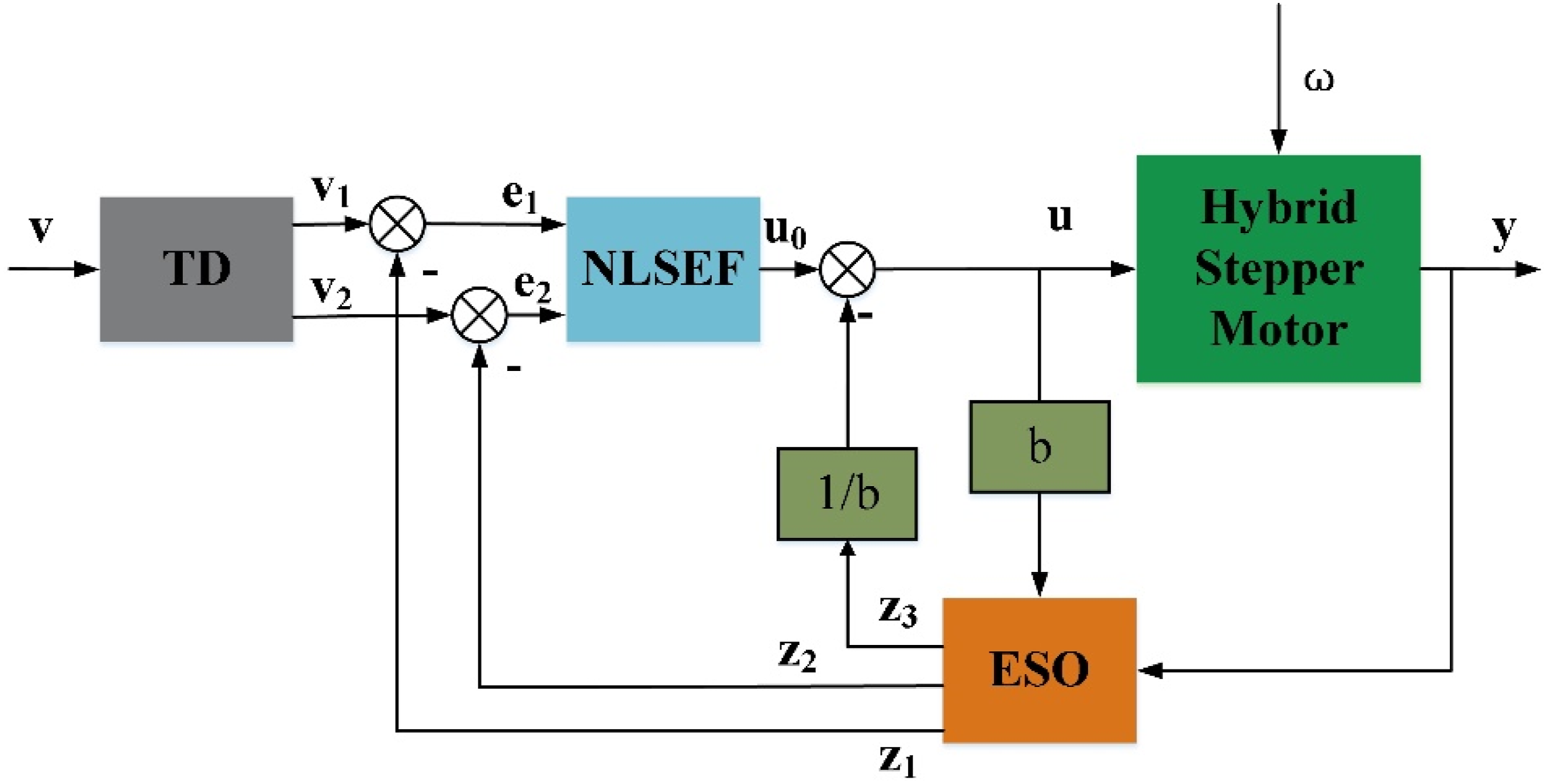
(as shown in Figure 7): the Tracking differentiator (TD), the extended state observer (ESO), and the nonlinear state error feedback (NLSEF) control law. • TD: It processes the reference input (desired trajectory or setpoint) to generate smooth reference values and their derivatives. Essentially, TD is a special dynamic filter that ensures the desired signal v and its first derivative • ESO: ESO is a state observer that adds an extra state variable to estimate the total disturbance of the system. The “total disturbance” ω includes external disturbances (such as forces, road bumps in the suspension, and load changes) as well as internal uncertainties (unmodeled dynamics or parameter variations). ESO receives the measured output of the controlled object (which may also include inputs) and continuously updates the estimates of the system’s true state variables and disturbances. • NLSEF: The NLSEF takes the error between the reference (from TD) and the observed state (from ESO) as input, and computes the control signal u to drive this error toward zero. In nonlinear ADRC, an adjustable nonlinear function is used to rapidly reduce the error to zero without causing oscillations. Therefore, NLSEF provides robust control by handling errors based on the current state estimate, and since ESO already accounts for disturbances, NLSEF can focus on forcing the real object to follow the reference. General structure diagram of ADRC.
Based on the state-space representation in equation (3), the system’s output equation is derived as follows:

Let the system control input be u(t), which is the current applied to the magnetorheological damper to control its output damping force. The system output consists of the seat acceleration 
TD design: TD is used to smooth the desired reference trajectory to avoid introducing high-frequency errors from the ideal reference v(t). The desired position v(t) (usually constant, such as the desired seat position v(t) = 0). The smoothed references 
ESO design: ESO is used to estimate the system states 


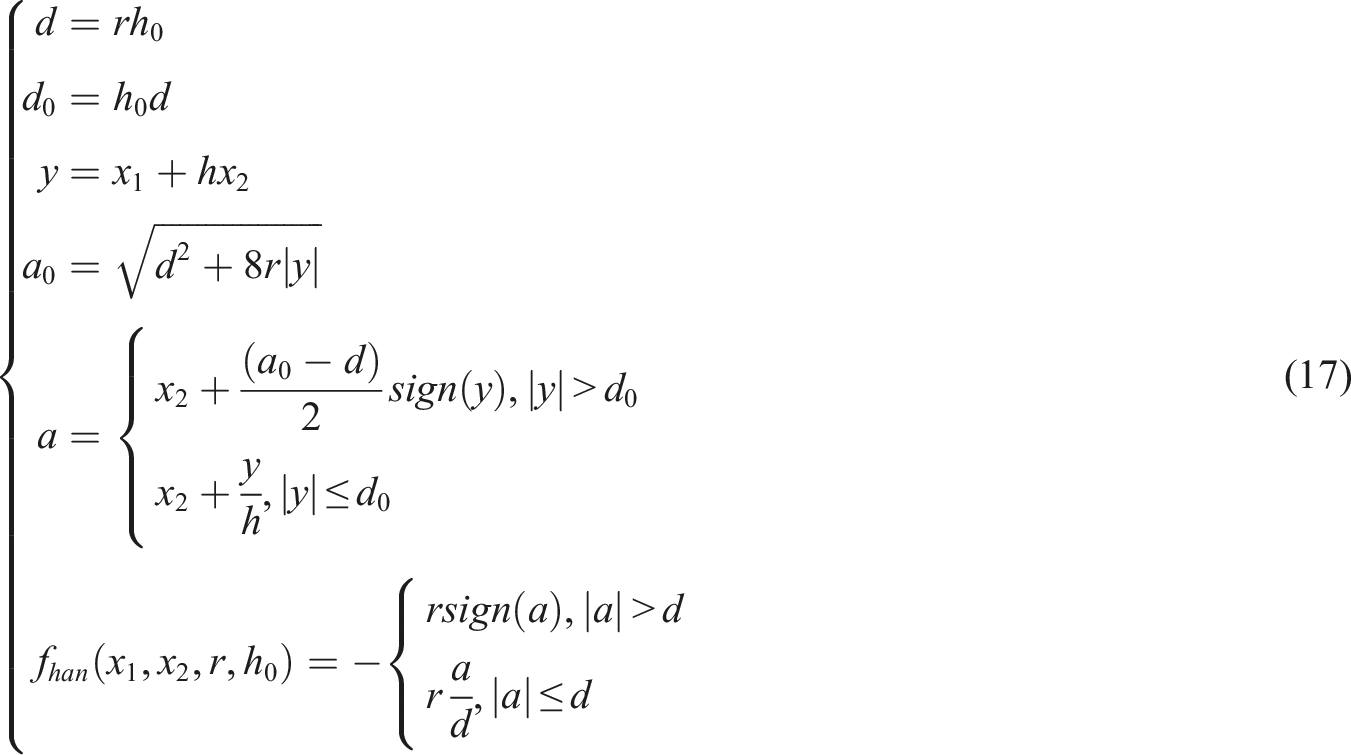
NLSEF control lawDesign: NLSEF is used to calculate the control input based on the tracking error, and the specific design is as follows:
Integrated PIMO-ADRC framework
By combining the advantages of PIMO (global optimization) and ADRC (robust control), an adaptive control scheme can be developed that is highly suitable for MR seat suspensions. In this framework, PIMO can function as an optimizer operating offline (during the controller design process) or can be run in an external real-time loop to identify ADRC parameters that minimize vibrations and improve ride comfort. The integrated system can be understood as a two-layer system: an internal control loop (ADRC adjusts seat movement via the MR damper) and an external optimization loop (PIMO adjusts the controller). The integrated control system framework is shown in Figure 8, where the metaheuristic optimizer (PIMO, in red) is used to adjust the parameters of the Extended State Observer-based Robust Control (ADRC). In the MR seat suspension system, PIMO will play the role of the “real-time optimization” module, adjusting the ADRC gain based on fitness evaluations (e.g., vibration levels). PIMO-ADRC integrated control framework diagram.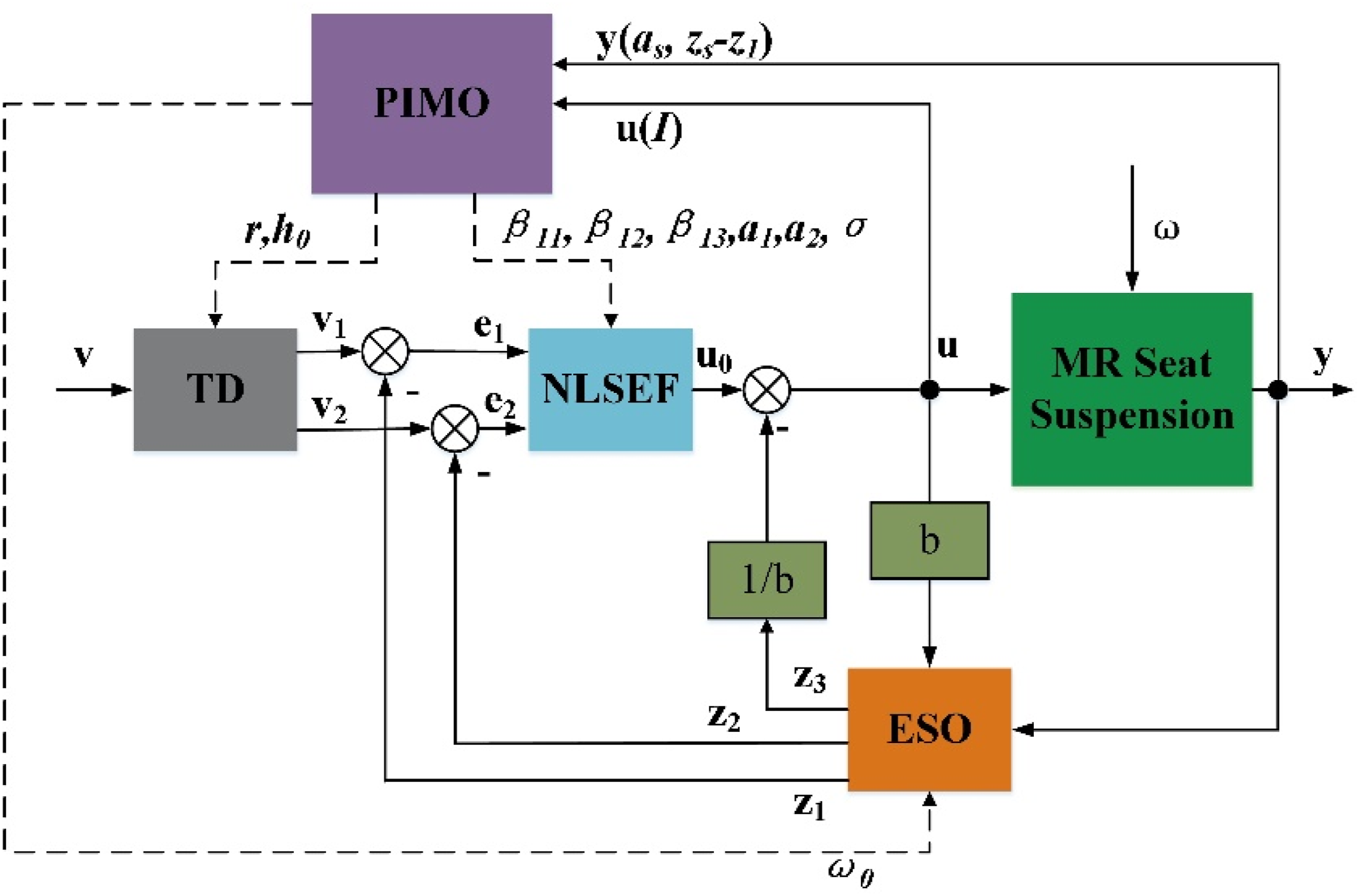
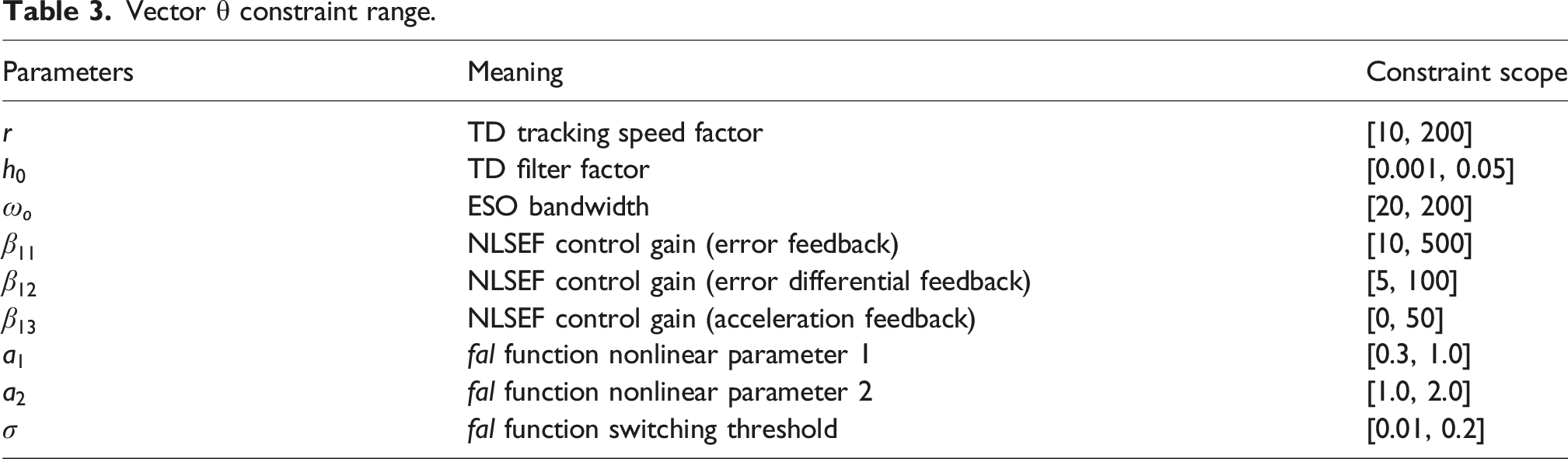
As shown in Figure 8, the inner loop consists of the magnetorheological (MR) seat suspension system controlled by ADRC. The controlled object is the seat suspension system (including the MR damper and seat mass dynamics), which receives a control input—typically the current flowing to the MR damper—to adjust its damping force. The ADRC controller acquires the seat’s motion (e.g., seat displacement or acceleration) and the reference value (usually the desired seat position or the zero-point for vibration isolation), and calculates the damper current u in real time. This inner loop itself is capable of suppressing disturbances (e.g., road roughness ω) and strives to maintain the seat’s stability and comfort. The outer loop is managed by PIMO, which adjusts the ADRC parameters θ (which can be gain vectors such as observer gain, feedback gain, and TD factor) to optimize performance. The specific process is as follows. (1) Define the performance metric function: First, we choose an objective or fitness function to quantitatively measure ride comfort and control performance. Common choices for the magnetorheological seat suspension include the RMS of seat acceleration (used to quantify the vibration perceived by the driver), the dynamic response of the suspension, and the energy consumption of the control system. We define this metric function as (2) Define the constraint range of the vector θ


Specific parameter table of vector θ.

Vector θ constraint range.
(3) PIMO parameter search: In each search iteration, PIMO obtains a set of parameter vectors
Simulation and analysis
Main parameters of the human-seat model.

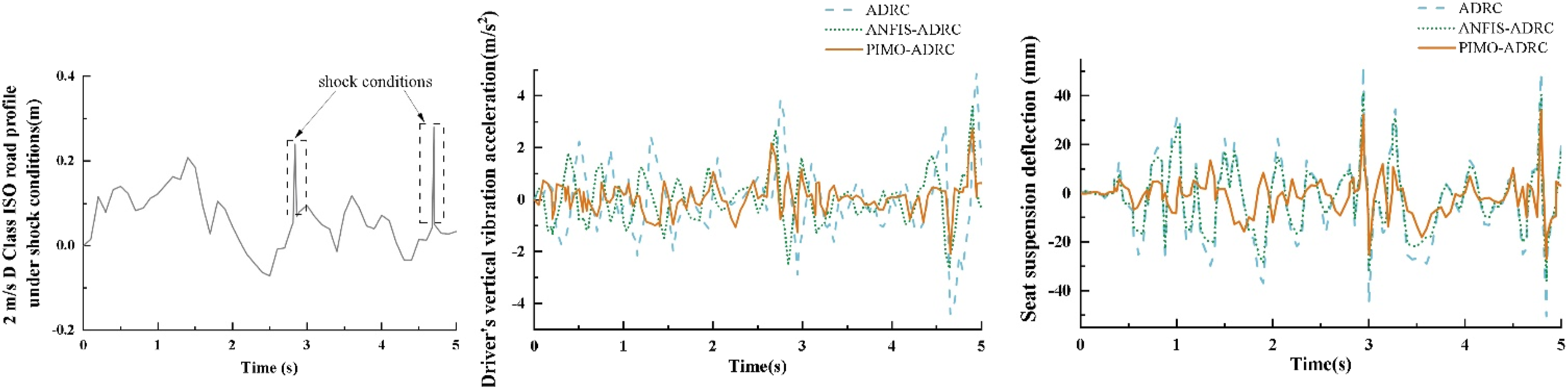
In the simulations, the road excitation was generated according to the ISO 8608 Class D random road profile.
31
The profile was synthesized from band-limited white noise with a reference spatial frequency of
Figures 9 and 10, respectively, illustrate the simulation results of the vertical vibration acceleration and the dynamic stroke of the agricultural vehicle seat suspension system. The results indicate that, compared with ADRC and standard ANFIS-ADRC controllers, the PIMO-ADRC control strategy enhances the vibration isolation performance of the seat suspension system more effectively. To more comprehensively evaluate the performance advantages of PIMO-ADRC in seat suspension applications, Table 5 summarizes RMS values of relevant suspension performance indicators. As shown in Table 5, the PIMO-ADRC strategy reduces the RMS values of vertical vibration acceleration to varying degrees when compared with the other two suspension strategies. Regarding the dynamic stroke of the seat suspension, the PIMO-ADRC system demonstrates significantly reduced dynamic displacements at both 1 m/s and 2 m/s compared with ADRC and ANFIS-ADRC systems, while maintaining robust control performance under impact conditions. The increase in external impact disturbances does not lead to a significant rise in the seat’s dynamic stroke, further highlighting the robustness of the PIMO-ADRC control strategy. Simulation of Class D road profile at 1 m/s under shock conditions. Simulation of Class D road profile at 2 m/s under shock conditions. Comparative performance under ISO Class D random road with superimposed shock inputs at two speeds: RMS seat acceleration and suspension working space (SWS). Note. SWS metrics are computed from the simulated relative displacement between the seat and the base, z
s
−z
c
; SWS95: 95th percentile of 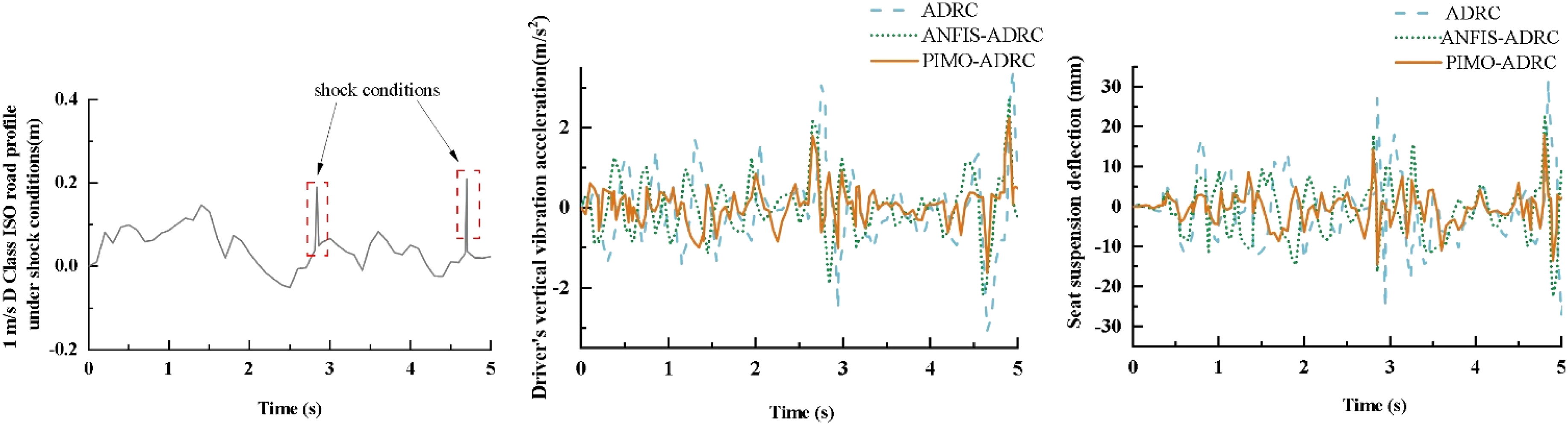
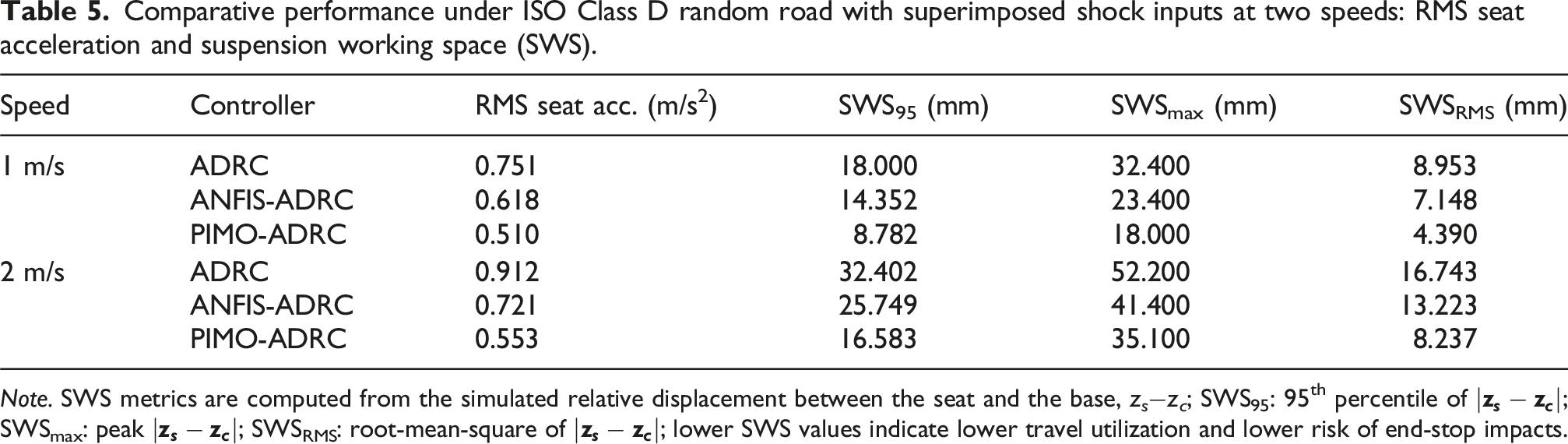
As shown in Table 5, the PIMO-ADRC suspension system significantly reduces the RMS value of vertical vibration acceleration compared with the ADRC and ANFIS-ADRC suspension systems. Under shock conditions at 1 m/s, a reduction of 17.5% was achieved compared to ANFIS-ADRC, and 28.7% compared to ADRC. At a speed of 2 m/s, this performance improvement was further amplified, with reductions of 23.3% and 39.4%, respectively, demonstrating the system’s adaptability to speed variations. Notably, the control strategy maintained its effectiveness under shock conditions. Critically, despite the increased disturbance intensity, the controller’s performance did not deteriorate, thereby confirming the robustness of the PIMO-ADRC architecture under varying operating conditions.
In addition to RMS vertical acceleration and seat deflection, the suspension working space (SWS) was introduced to quantify suspension-travel utilization and end-stop risk. For each test, the following metrics were defined:


As summarized in Table 5, the proposed PIMO-ADRC consistently yields the smallest
Conclusion
This study introduces an adaptive control strategy for MR seat suspension systems by combining the Projection-Iterative-Methods-based Optimizer (PIMO) with Active Disturbance Rejection Control (ADRC). Through real-time optimization of ADRC parameters, the PIMO-ADRC framework effectively compensates for the nonlinear hysteresis and time-varying characteristics inherent to MR dampers. Simulation results under ISO Class D road profiles at two vehicle speeds confirm the superiority of the proposed control scheme. Compared with the traditional ADRC and ANFIS-ADRC strategies, the PIMO-ADRC system significantly improves vibration isolation. Specifically, it reduces the RMS value of vertical seat acceleration by 32.1% at 1 m/s and 39.4% at 2 m/s compared to ADRC, and by 17.5% and 23.3%, respectively, compared to ANFIS-ADRC. Additionally, the system maintains lower dynamic stroke and stable damping control even under strong road shocks, demonstrating improved robustness. These results underscore the framework’s adaptability across varying operating conditions and road excitations. The integration of PIMO eliminates the need for manual parameter tuning and accelerates convergence toward optimal configurations. Therefore, the PIMO-ADRC approach offers a robust and efficient control solution for semi-active seat suspensions, advancing comfort and safety for agricultural and off-road vehicle applications. The integration of PIMO and ADRC effectively eliminates manual parameter tuning and maintains optimal damping control under varying field conditions, contributing to improved long-term operator health and suitability for agricultural applications.
Although the proposed PIMO-ADRC strategy shows promising performance in simulation, practical implementation may face challenges such as sensor robustness in agricultural environments, computational requirements for real-time optimization, and integration with MR damper hardware. Future work will focus on hardware-in-the-loop experiments and field testing to validate the controller under real operating conditions.
Footnotes
Author contributions
Conceptualization: Wei Tao and Bin Chen; methodology: Wei Tao and Bo Guo; software; Bo Guo and Limei Zou; validation: Xinkun Yang, Zheng Lin, and Bin Chen; investigation: Zheng Lin; data curation: Limei Zou and Bo Guo; writing—original draft preparation: Wei Tao and Bin Chen. All authors have read and agreed to the published version of the manuscript.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the Natural Science Foundation of Fujian Province (Grant Nos. 2023J011041 and 2024J01909), the Fujian Provincial Key Science and Technology Project: Key Technologies and Equipment for Continuous and Intelligent Production of Bamboo Scrimber (Grant No. 2024HZ026011), the Nanping Science and Technology Plan Project (Grant Nos. N2023Z001, N2023Z002, N2023J001, and N2024Z001), and horizontal projects of Wuyi University (Grant No. 2024-WHFW-030).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.