This work focuses on vibration alleviation and energy harvesting in a dynamical system of a spring-pendulum. The structure of the pendulum is modified using an independent electromagnetic harvesting system. The harvesting depends on the oscillation of a magnet in a coil. An endeavor has been made to get both the energy harvesting and mitigation of vibration efficacy of the harvester. The governing kinematics equations are derived using Lagrange’s equations and are solved asymptotically using the multiple scales method to achieve the intended outcome as new and precise results. The resonance states are classified, and the influence of various parameters of the studied system is analyzed. Fixed points at steady states are categorized into stable and unstable. The time behavior of the solutions, the modified amplitudes, and phases are examined and interpreted in the light of their graphical plots. Zones of stability and instability are concerned, in which the system’s behavior is stable for a wide range of used parameters. This model has become essential in recent times as it uses control sensors in industrial applications, buildings, infrastructure, automobiles, and transportation.
In the past few decades, extensive studies have centered on the concept capable of damping harmful vibrations in various sorts of structural engineering: high-rise buildings, bridges, towers, rotary turbines, cables, helicopter feathers, and the robot’s arms.1 The extensive vibrations are generated by earthquakes, rapid speeds of vehicles, and tremendous winds that may be perilous if they affect the stability and integrity of the structure. Therefore, civil structures require special requirements for vibration alleviation or the addition of isolators between the machine and the excitation generator, modification of the structure to hold vibration far away from resonance positions, or absorption or dispersion of vibration energy using extrinsic apparatus. The primary way to achieve these critical requirements is by dealing with stiffness besides damping control or activating a dynamic vibration absorber (DVA). It can be used to suppress undesired machine vibrations. The simplest form of the DVA consists of a spring-mass-damper (SMD).2,3
On the other side, vibration energy, which has recently gained much focus, is a sustainable renewable energy source. Vibrations with large amplitudes can be employed to gather energy harvesting (EH), which is also renowned by energy scavenging (ES). It is defined as turning vibrational kinetic energy into serviceable electric energy. Vibration, mechanical strain, and stress are considered sources of energy that can be recovered from mechanical systems. Small devices, including wireless sensors and micro-electromechanical systems (MEMS), can be powered by EH.4,5
For decades, batteries have been used as the primary power source for mobile electronic gadgets. However, in MEMS, the scaling rate was far faster than in battery technologies.6
The lack of built-in and effective power sources has become one of the limitations that enable the increasing use of portable and wireless systems in everyday life; since it is impractical to use large batteries and replace them on a regular basis in specific applications, therefore, the use of EH as a major energy source in tiny systems is the best possible idea. Consequently, temporary energy tanks may be exchanged with continuously charged energy store elements using available energy resources, including sunshine, vibration, and heat.7–9 Among them, vibration is particularly charming due to its wide uses. Some of the sources of vibrations in environments are vehicle movement and human movements.
Energy can be harvested from these sources using electromagnetic transduction, electrostatic, or piezoelectric. The majority of these vibrations, on the other hand, happen at low frequencies resulting in low power levels at the output; the amount of energy retrieved from these systems is mainly in the order of micro- to milli-watts.10–13 The low-frequency property also plays a vital role in mass and energy delivery on a nano-/microscale.14–16
Electromagnetic energy harvesters are instituted on the induction law of Faraday, which states that any change in the magnetic environment of a coil of wire will cause induced electromotive force (EMF) in the coil. It happens according to the magnet’s movement in relation to the coil.17 Electrostatic transmutation utilizes capacitors to transmit mechanical energy to an electric field. This capacitor can be used as a current source to power an electric circuit.18 A piezoelectric material will produce an electric field during the piezoelectric processing, and therefore, when deformed under stress, a voltage is produced.19
The movement of the pivot point of the springe’s pendulum on various trajectories is investigated in several works.20–24 The motion of a solid body pendulum is analyzed in Refs. 20–22 when the pivot point moves in elliptic paths or in Lissajous curves for different linear or non-linear stiffness cases of the spring. The rigid triple-pendulum motion is checked in Ref. 23 under the action of excitation force and the moment when its attached point moves in a circular path. The estimated results are gained applying the multiple scales method (MSM) up to different orders of approximations. In Ref. 24, the MSM is used to carry out the electromagnetic spring-pendulum harvester model; a two-to-one internal of vibratory energy harvesters are studied.
In Ref. 25, the authors demonstrated the numerical study of an auto-parametric pendulum absorber with a composite harvesting system. Moreover, effective electricity is discussed in relation to the system and various electrical standards. A system of energy harvesting is investigated based on the dynamic pendulum absorber and an electromagnetic harvester in Ref. 26. A new system for simultaneous energy harvesting and vibration dampening is presented in Ref. 27. The absorber was an auto-parametric pendulum, and the energy harvester was a pendulum-mounted electromagnetic harvester. The overall behavior of this new absorber combine harvester was investigated, and the results indicated that the harvester did not decrease the vibration reduction efficiency. It has been observed that energy can be harvested for the rotation of the pendulum and chaotic motion. A pendulum system with two independent electromagnetic harvesters has been introduced in Ref. 28. A direct current (DC) electric motor is added to the pendulum’s axis to be a second harvesting machine. The results revealed that the suggested system is greatly increasing the capacity of EH. However, the rotary harvester has lessened the vibration suppression efficiency. In Ref. 29, the vibration absorber was developed into an energy harvesting device and vibration absorbing system to suppress undesired vibrations and to produce an induced voltage that could be used in low voltage applications such as wireless sensors. In Ref. 30, numerical analysis of a semi-active suspension mounted absorber or harvested system has been studied, in which the primary objective is used to damp the primary structure’s vibration and the secondary objective is to simultaneously harvest energy from the absorber’s vibration. The pendulum-tuned mass absorber is adjusted by a magnetic levitation harvester. In Ref. 31, the authors studied the effect of EH and control of vibrations by a specially designed pendulum absorber in addition to the use of non-linear vibration absorbers as an energy harvester. The use of an energy recovery device has been shown to increase vibration reduction in the low-frequency range. In Ref. 32, the authors focus on a new pendulum absorber harvester configuration that permits for amended shaking suppression and EH properties. The new absorber structure refers to the use of magnets, its performance is studied theoretically and empirically, and the outcomes demonstrate that the new absorber harvester has a better performance than the traditional device regarding both vibration suppression and EH. The authors investigated in Ref. 33 the motion of an axial pendulum model, which is based on a coupled 2DOF dynamical model that respects two horizontal and vertical axes of the pendulum.
The method of harmonic balance (MHB) is applied in Refs. 34, 35 to illustrate the response and stability of EH electrical and mechanical systems, in which the harvesting system is made up of two similar magnets placed securely at the tube’s end. Between them, a third magnet is magnetically free to ascend. The influence of the parameters of the harvester on system responsiveness and energy recovery around the most important resonance has been thoroughly investigated.
In this paper, we present a simple apparatus based on spring oscillations for harvesting energy from oscillating environments. A power generator converts the mechanical energy of a spring into an electric one, which can be utilized in a variety of applications, including automotive,36 wireless sensor networks (WSNs),37 health-monitoring devices,38 and structural engineering.39 The researched system’s mathematical model and operating principles are provided. The MSM is being utilized to gain the desired solutions that are matching to the system’s generalized coordinates. The modulation equations are acquired in light of the emerging cases of resonance. The dynamic response curves of the resonance are examined through some plots at values close to the resonance regions, in which the stability of the considered system is examined. The historical variations of the achieved solutions with time are performed. The adjusted phases and the amplitudes are presented to demonstrate the efficacy of the physical parameters at any given moment, where the plots of their phase planes are presented to confirm that we have stable fixed points in these cases of steady state. The types of these points were checked in terms of their stabilities. The non-linear stability analysis of Routh–Hurwitz is examined and discussed.
The problem’s description
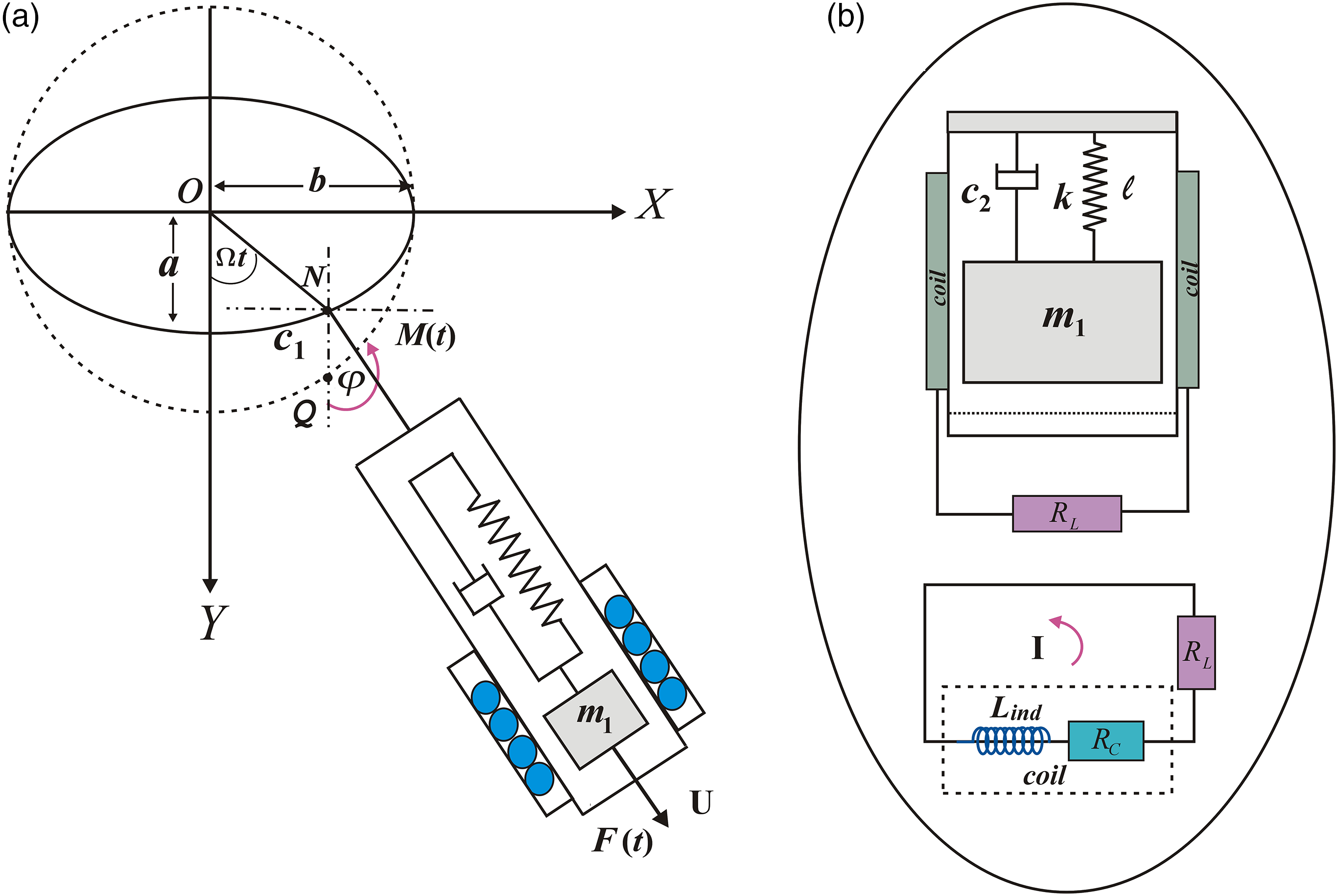
This section is proceeded to describe the investigated model. Therefore, let us consider an advanced harvester comprised of a cylindrical tube with two imperishable magnets attached inside the tube at its ends, besides a third movable magnet with a mass that is attached to a massless linear spring with stiffness , damping coefficient , and non-extended length . A harmonic excitation force is imposed upon the magnet beside a moment acting on the suspension point of the spring. This point is only allowed to move in an elliptic trajectory with minor and major axes and , respectively. Let a point be a projection of the point on a supplementary circle in which it moves with a constant angular velocity (see Figure 1(a)). Therefore, the kinematics coordinates of the point can be written as follows
(a) A schematic diagram of spring-pendulum with an energy harvester and (b) the harvester model with an electric circuit.
Let represents the rotatory damping coefficient of the spring at the rotatory point, denotes the current due to the oscillations of the magnet in a coil, the harvester electric component composed of which points to the load resistance of the resistor, refers to the coil’s inductance, is the coil’s resistance, and express the coil length (see Figure 1(b)).
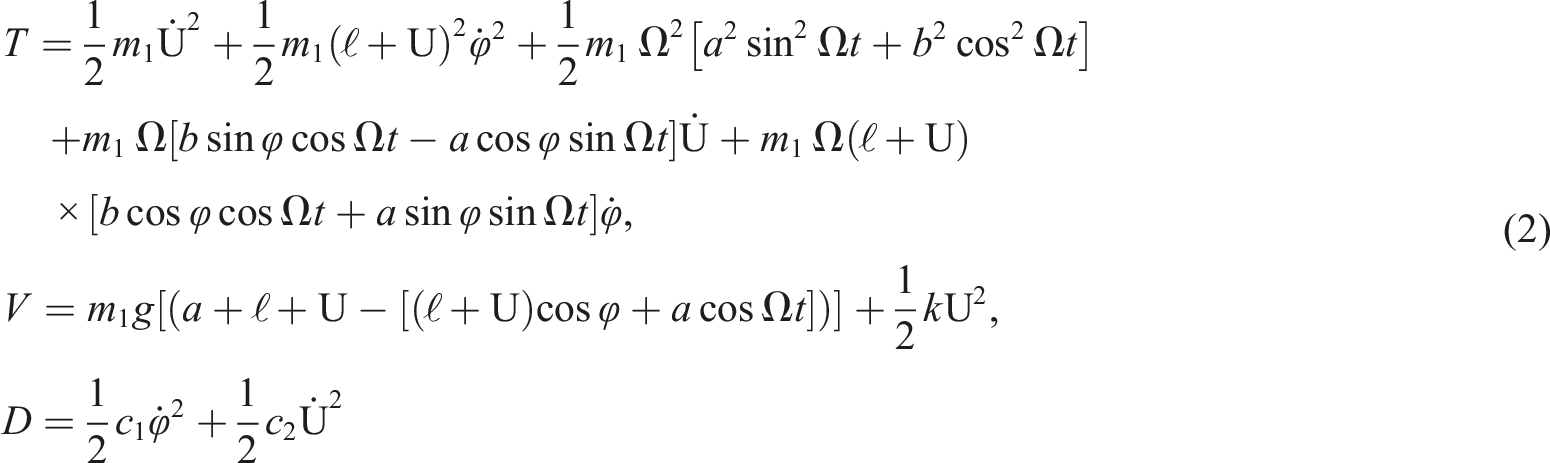
To derive the equations of motion (EOM), we consider that the variables and describe the extension of the spring and the rotatory angle, respectively. Therefore, the kinetic energy , the potential one , and the dissipation function can be expressed as
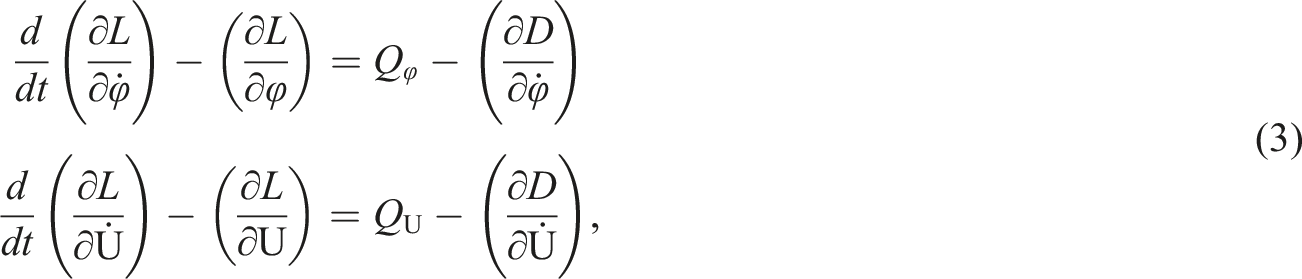
Based on (2) and Lagrange’s functions , we can derive the EOM according to the below equations of Lagrange40–42
where and are the generalized forces
Here, and are the amplitudes and the frequencies of the moment and the external force , respectively.
Substituting (2) and (4) into (3) produces the EOM as in the following non-dimensional form
where dots are the time derivatives.
Applying Kirchhoff Volt Law (KVL) and Faraday’s one24 of the electromagnetic induction for the circuit of Figure 1(b), then we can write
where is the summation of the load resistance and the coil’s resistance .
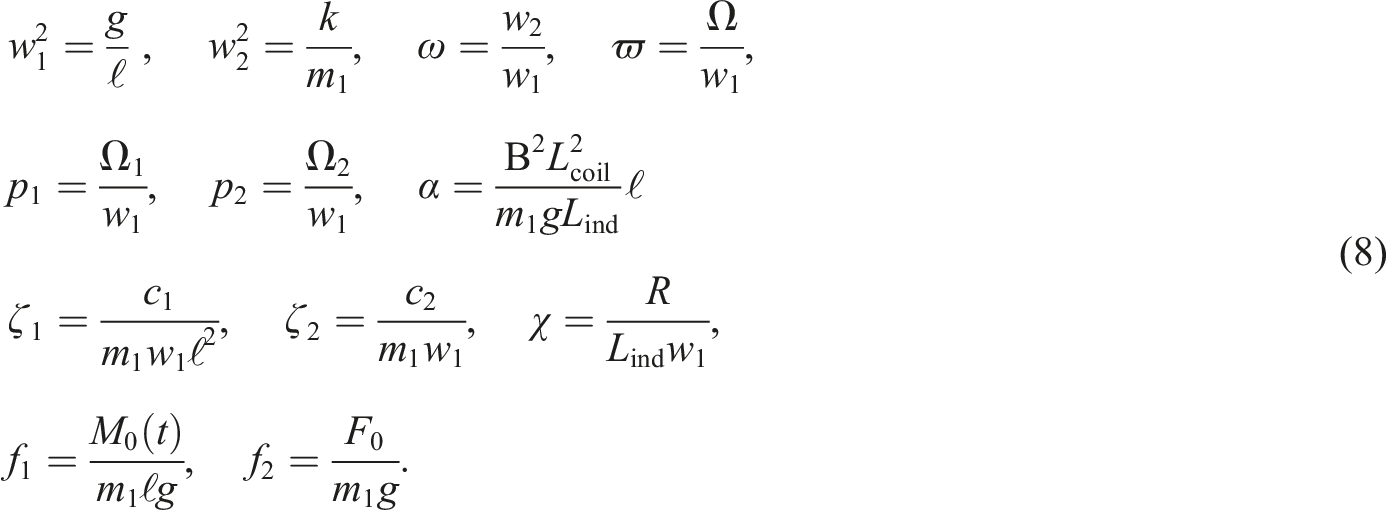
Inserting a dimensionless time parameter , dimensionless coordinates besides the following dimensionless parameters
Substitution of (8) into (5), (6), and (7) yields the following dimensionless forms of the EOM
where dots denote the differentiation with respect to . The above three equations are considered as non-linear second-order differential equations.
Asymptotic method of the solutions
The main objective of this part is to get the desired solutions to the EOM of the preceding system (9)–(11) up to higher order of approximation using one of the significant perturbation approaches known by the multiple scales method (MSM) and to classify the resonance cases.22 It should be pointed out that non-Gaussian random vibration test can also be applied effectively.43–45
To realize this objective, we approximate the functions and up to third-order using the Taylor series, which are valid in close proximity to static equilibrium. Therefore, equations (9)–(11) can be rewritten in the form
We assume that the generalized coordinates can be expressed in terms of the order . Therefore, we consider new variables , and as follows
According to MS procedure, we can introduce the functions , and in powers of as follows
where perform diverse time scales, where and act as the fast and slow scales, respectively. To define , and as functions of , we transform to according to the following operators
It is worthwhile to notice that terms of and higher are negligent because to their smallness.
The coefficients of damping and the generalized forces are given in terms of as follows
where the parameters , and are of unity order.
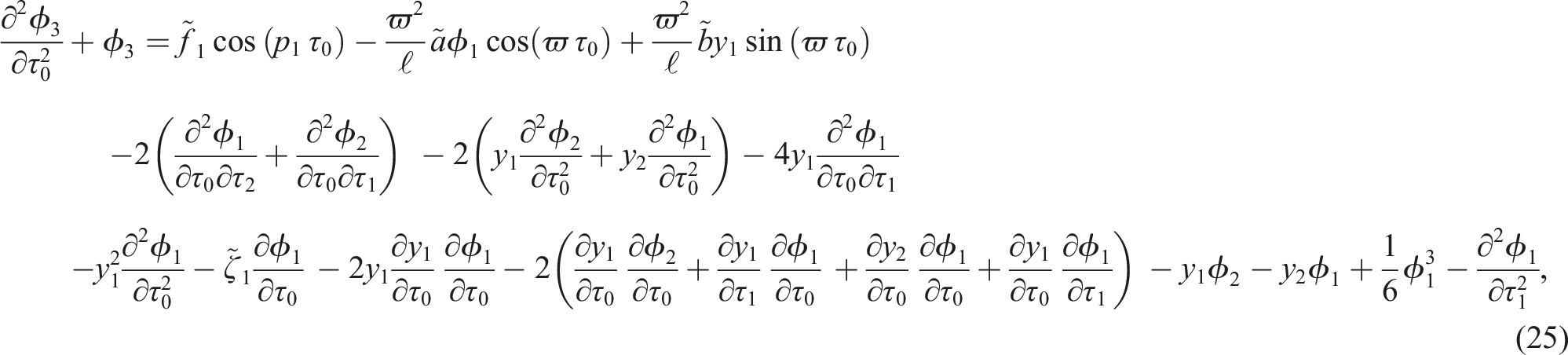
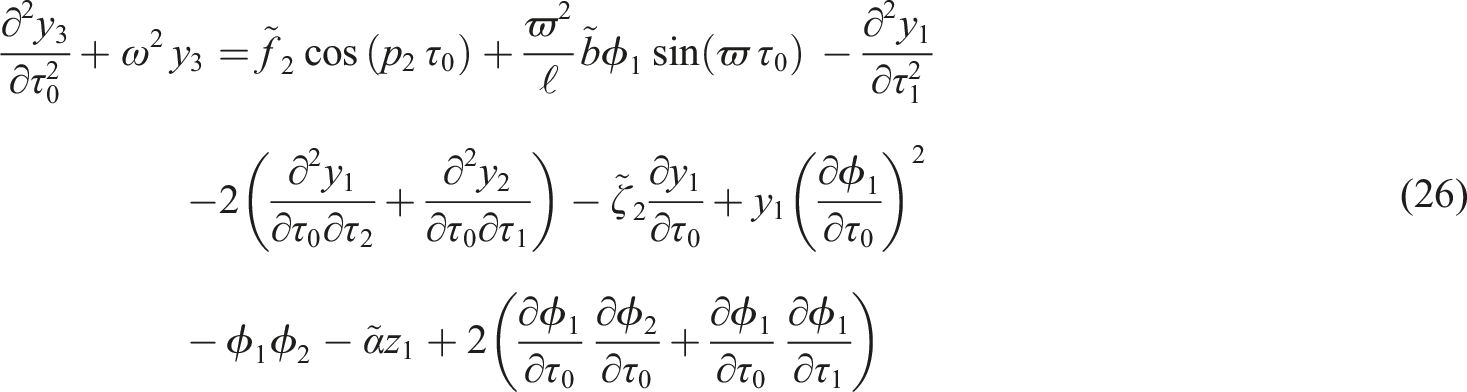
Substituting (15)–(18) into (12)–(14) and equaling the coefficients of distinct powers of , and , to yield the below groups of partial differential equations (PDEs).
Order of
Order of
Order of
It is worthy to remark that the above three systems of orders of constitute nine PDEs that can be solved sequentially. To acquire this goal, we begin with the general equations (19)–(21), which can be written as follows
To get the general solution of , substituting (29) into (21) to obtain a nonhomogeneous PDE which can be solved in the form
where and are complex functions of the slow scales and , whereas points to their complex conjugates.
Substituting (28)–(30) into (22)–(24) and removing terms that give secular terms to obtain uniform asymptotic solutions. Then, the second-order solutions have the forms
where indicates the conjugates of the former terms.
Based on the above, we can find the conditions for canceling secular terms from the second approximations in the forms
Therefore, the functions and depend on only.
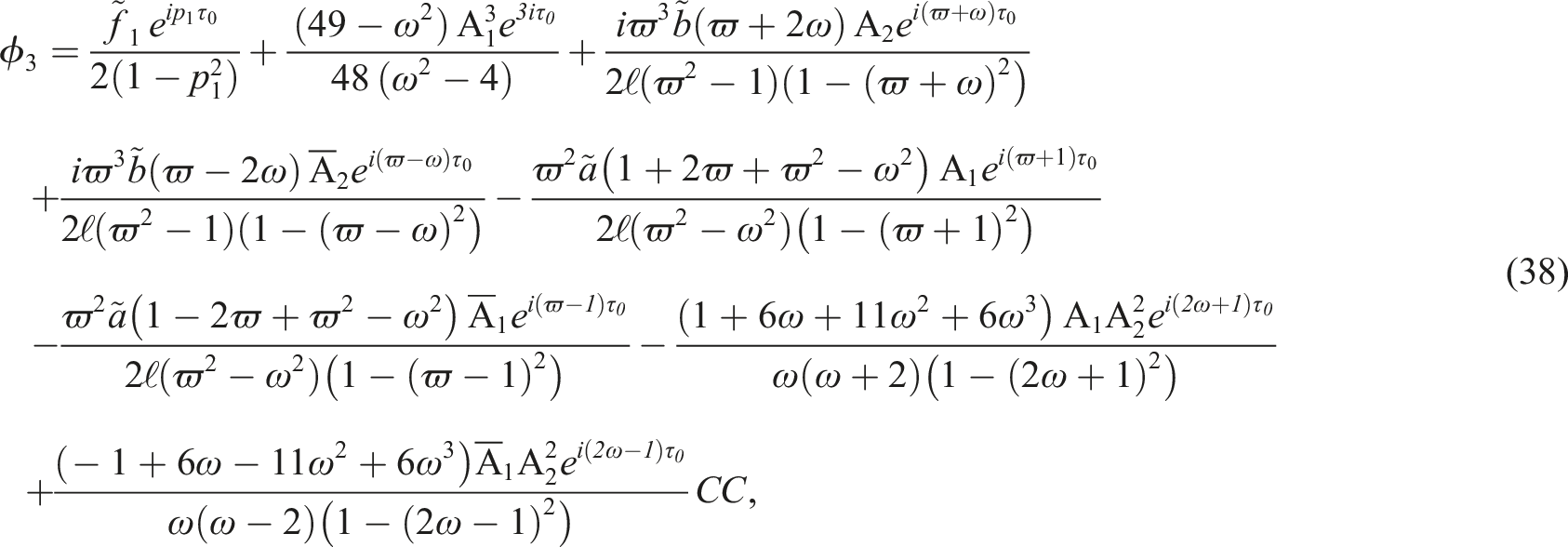
Substituting (28)–(30) and (31)–(34) into (25)–(27) and then canceling terms that yield secular ones to gain the solutions of the third-order approximations. To remove these terms, the following conditions must be satisfied
Then, the solutions of the third approximations , and have the forms
The undefined functions and can be determined from the removing conditions of secular terms (34) and (35)–(37) besides the following initial conditions
where are known quantities.
Resonance cases and stability’s evaluation
In this section, we focus on the classification of the resonance cases. If the denominators of the second and third approximations become zero, resonance is produced. Therefore, several resonance cases can be discovered from equations (31)–(33) and (38)–(40), which may be categorized into three partitions: the first one which is the primary external at ; the second one known by internal resonance occurs at while the third one is defined by combination resonance in which it arises at .
It should be mentioned that if any one of these cases is satisfied, the behavior of the examined will be exceedingly difficult. Furthermore, if the vibrations have values that are not close to the resonance cases, the above approximate solutions will be valid.
To check the stability of the system,46–48 we need to obtain the solvability conditions and the modification equations for the acquired solutions. Therefore, we will examine the two cases of the primary external resonance that occurs simultaneously, that is, we consider a combination of and which describes the nearness of and to and , respectively. Then, we insert the detuning parameters as follows
These parameters are considered as an indication of the distance of the oscillations from the tough resonance. As a result, we define them in terms of according to the following relations
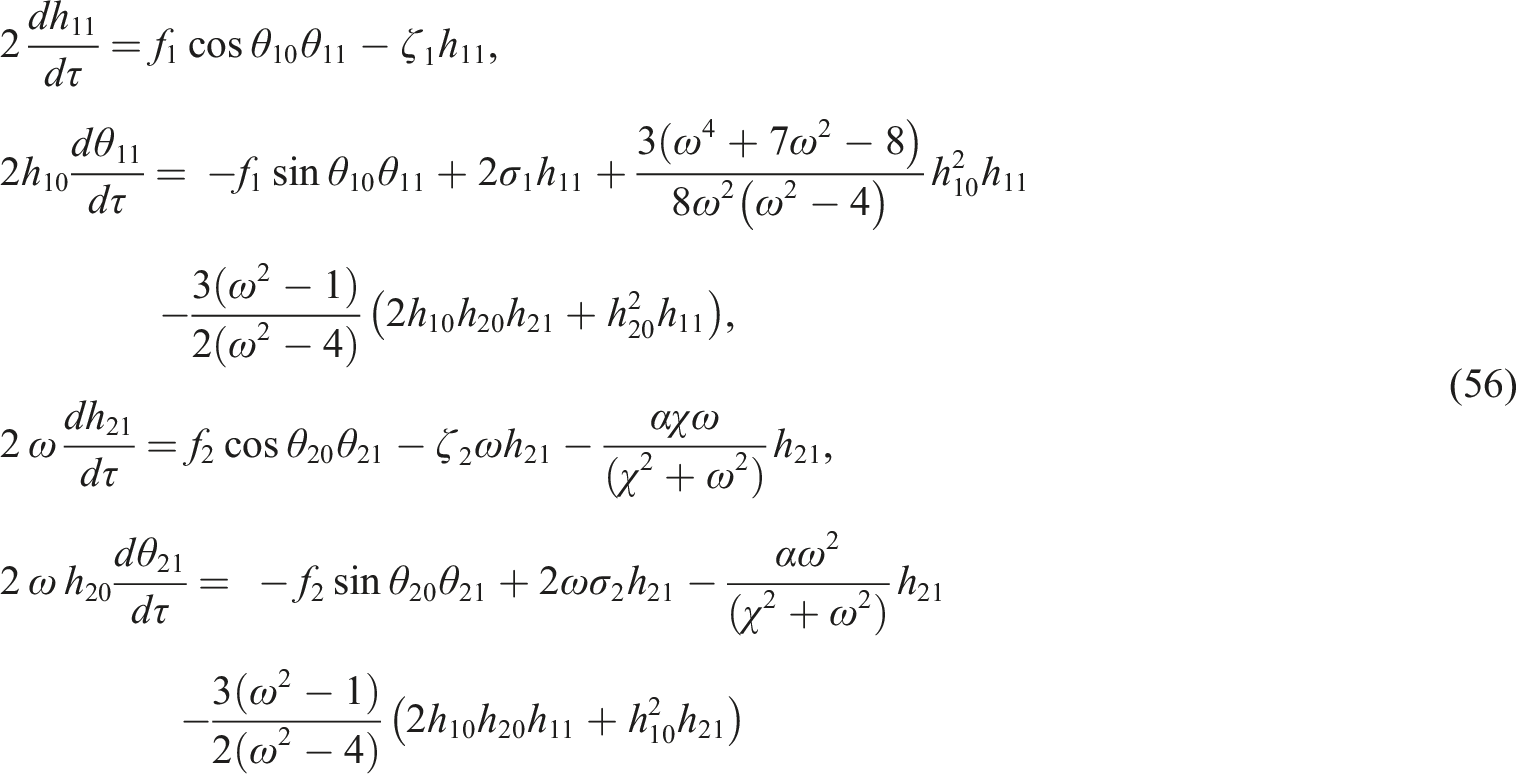
Substituting (42) and (43) into (22), (23), (25), and (26) and eliminating terms that produce the secular terms, we establish the conditions of solvability in the following forms:
- In accordance with the second-order of approximation
- In accordance with the third-order of approximation
From the third equation of (45) and the conditions (44), we can obtain the expression of in the form
where is an unknown complex function of the higher slow time scales than .
Referring to the above solvability conditions (44) and (45), we can determine the functions , which depend only on . Therefore, we consider the polar forms according to the following
where and are real functions of the amplitudes and phases of the solutions and , respectively.
Since are dependent only on , then their first-order derivatives will have the form
Considering the previous formula (48), we convert PDE (45) to ordinary differential equations (ODEs) according to the following substitution of the modified phases
Substituting (47)–(49) into (45) and then distinguishing the real portions and the imaginary ones, we obtain the desired autonomous system of PDE in the form
Equations of the above system represent the equations of modulation for both modified phases and amplitudes and, respectively, in which it consists of four ODEs from first order that can be obtained when two resonance cases occur at the same instance. The solutions of these equations are plotted for some selected values of the system’s parameters as in Figures 2–6 in accordance with the following data
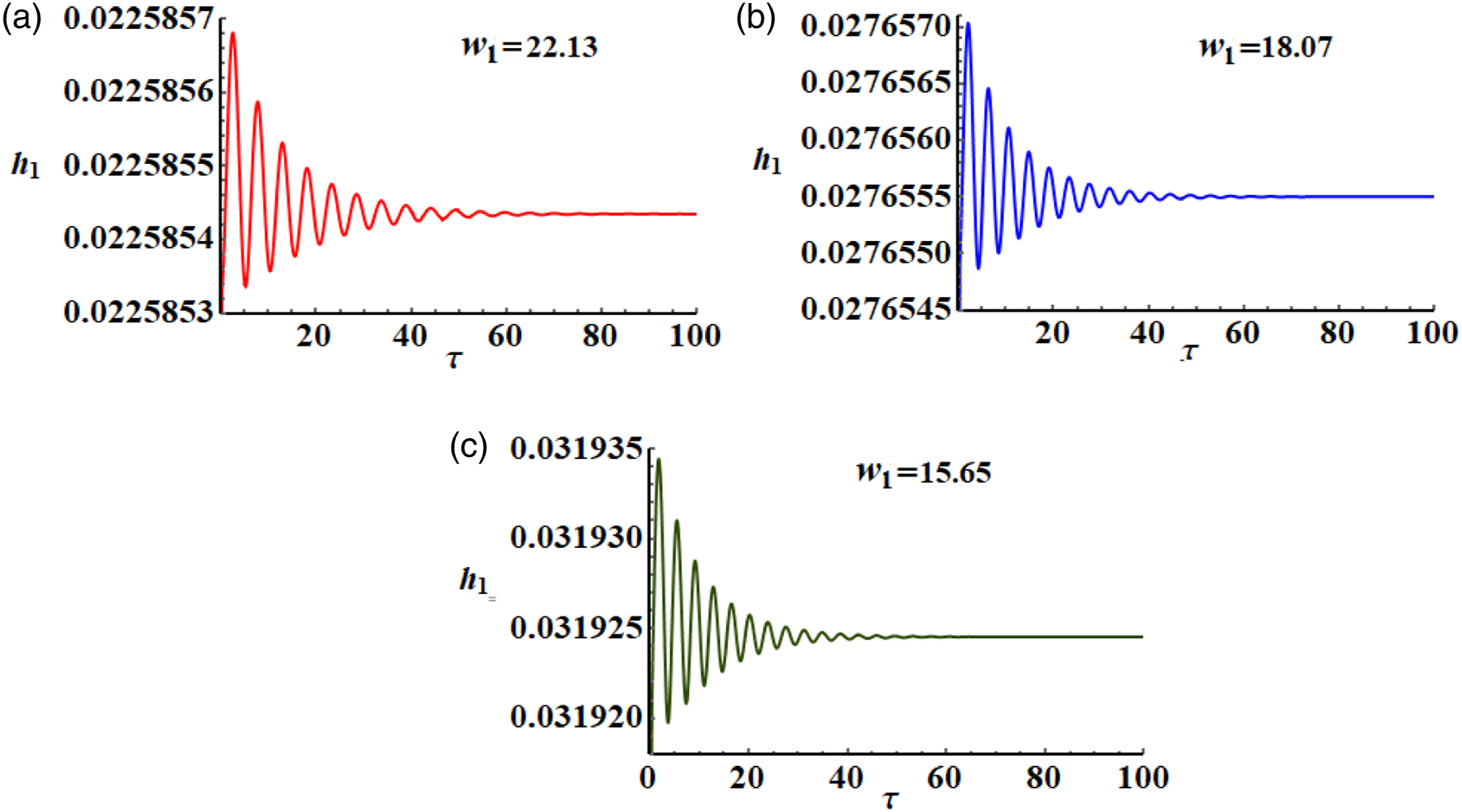
The amplitude’s time history of at .
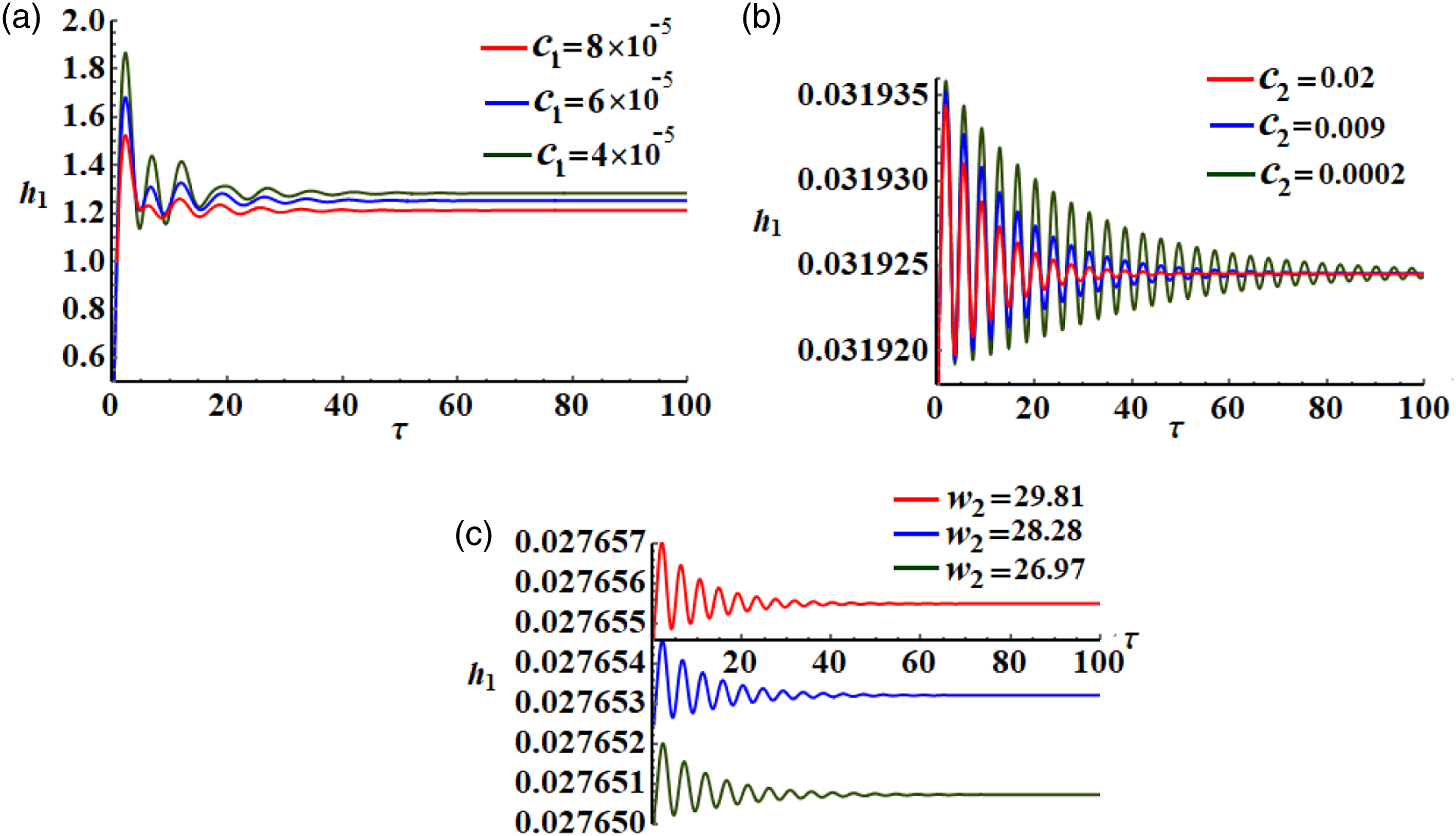
The change of the modified amplitude versus at (a) , (b) , and (c) .
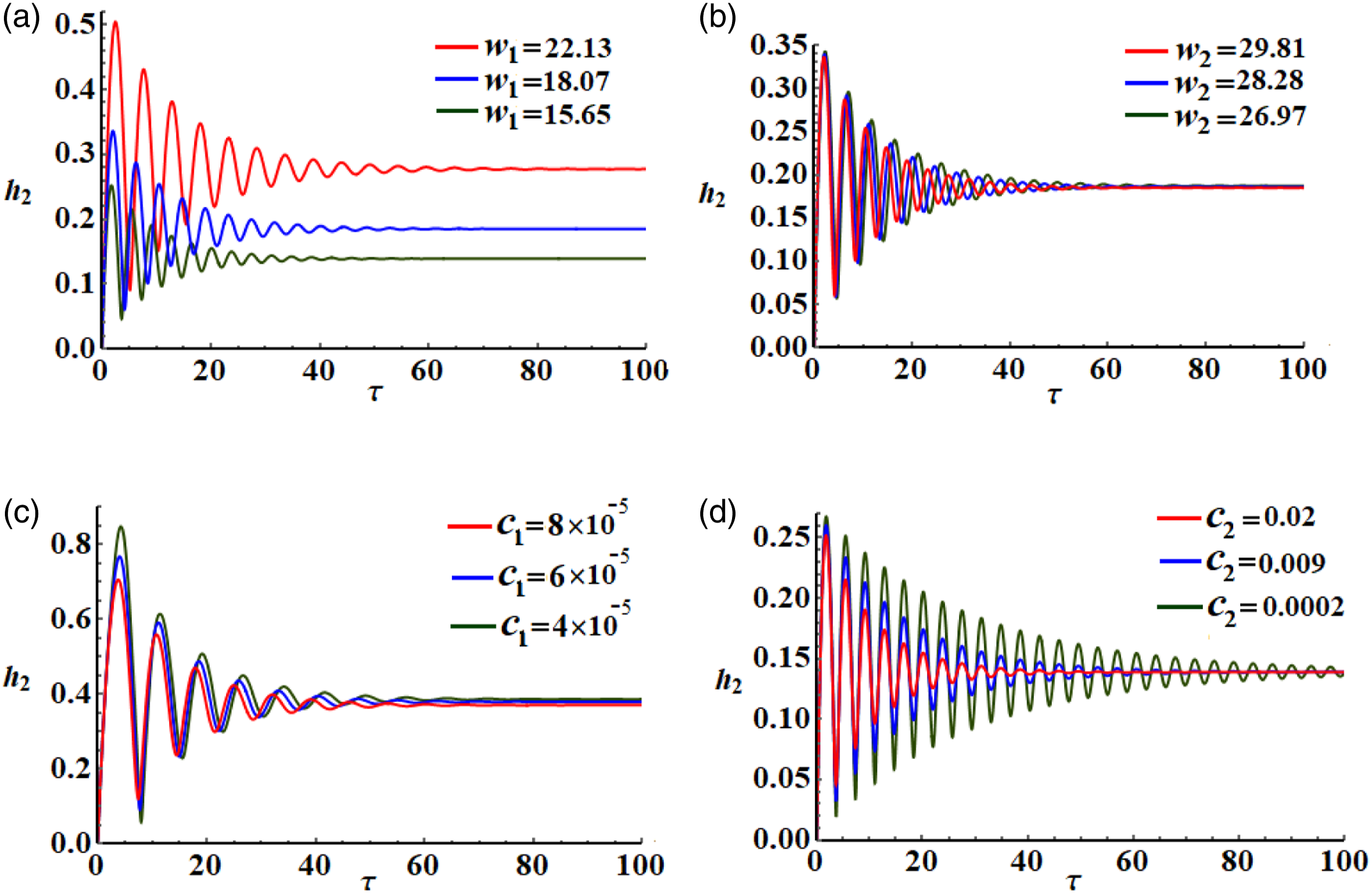
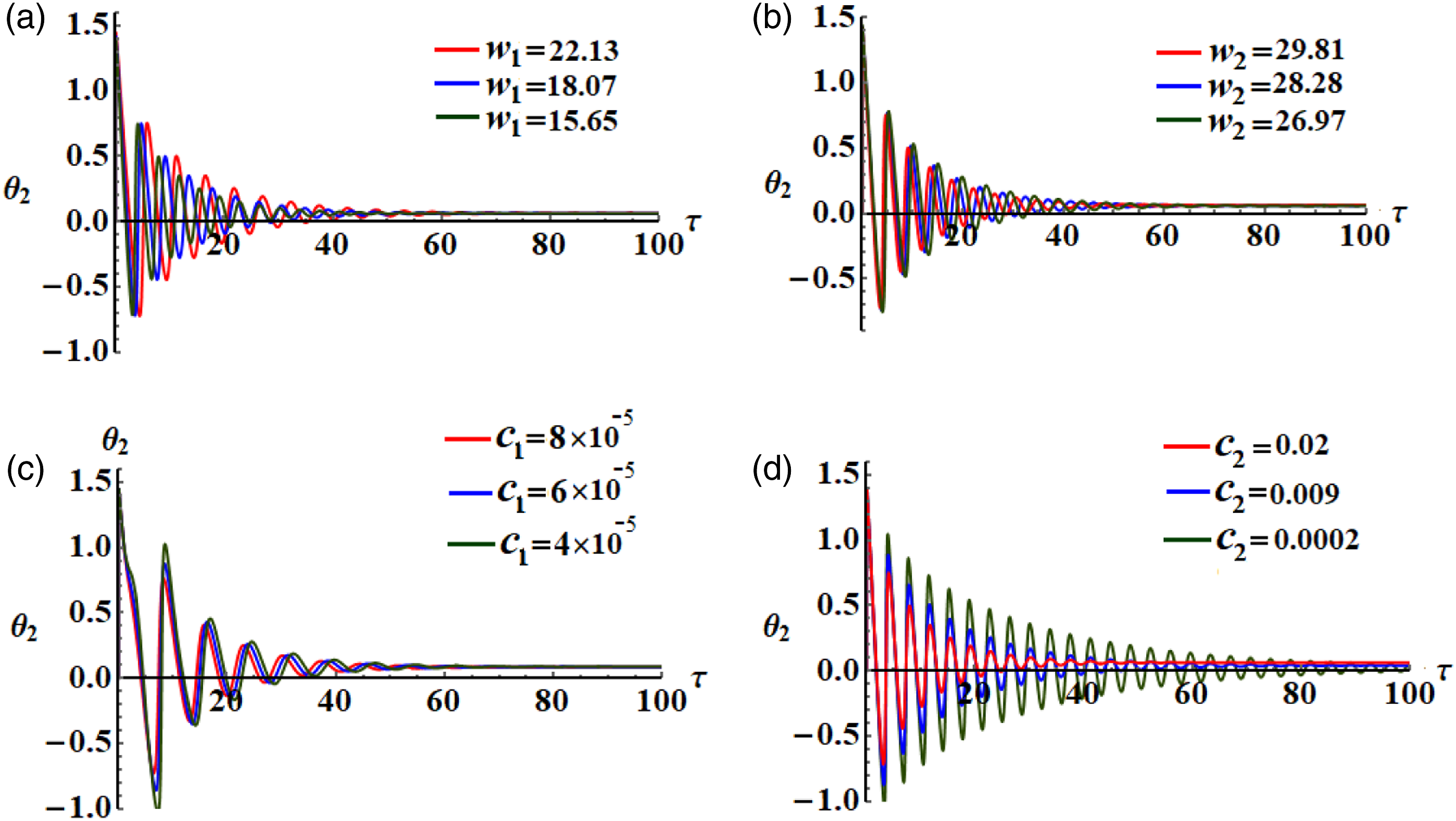
The time history of at different values of and .
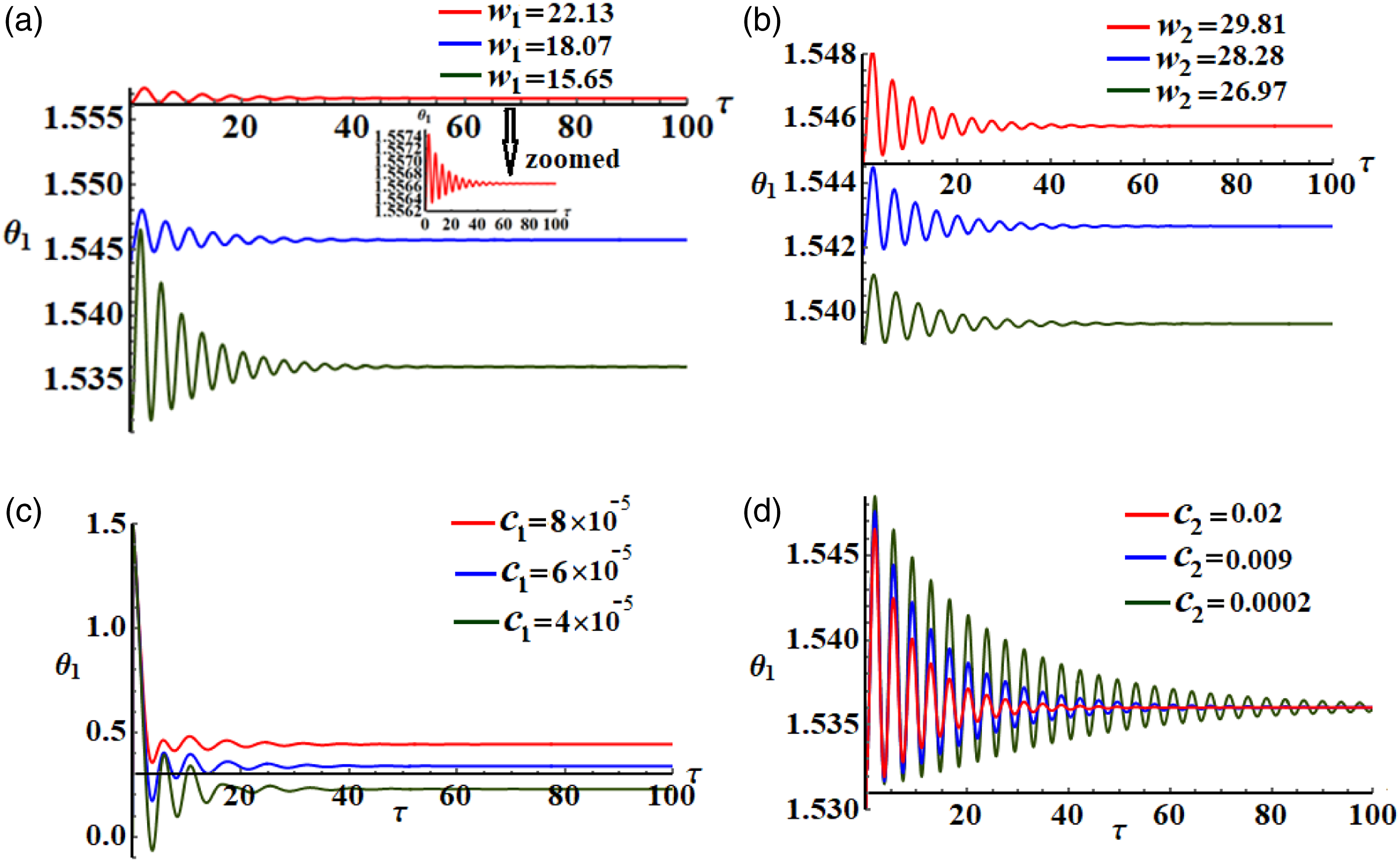
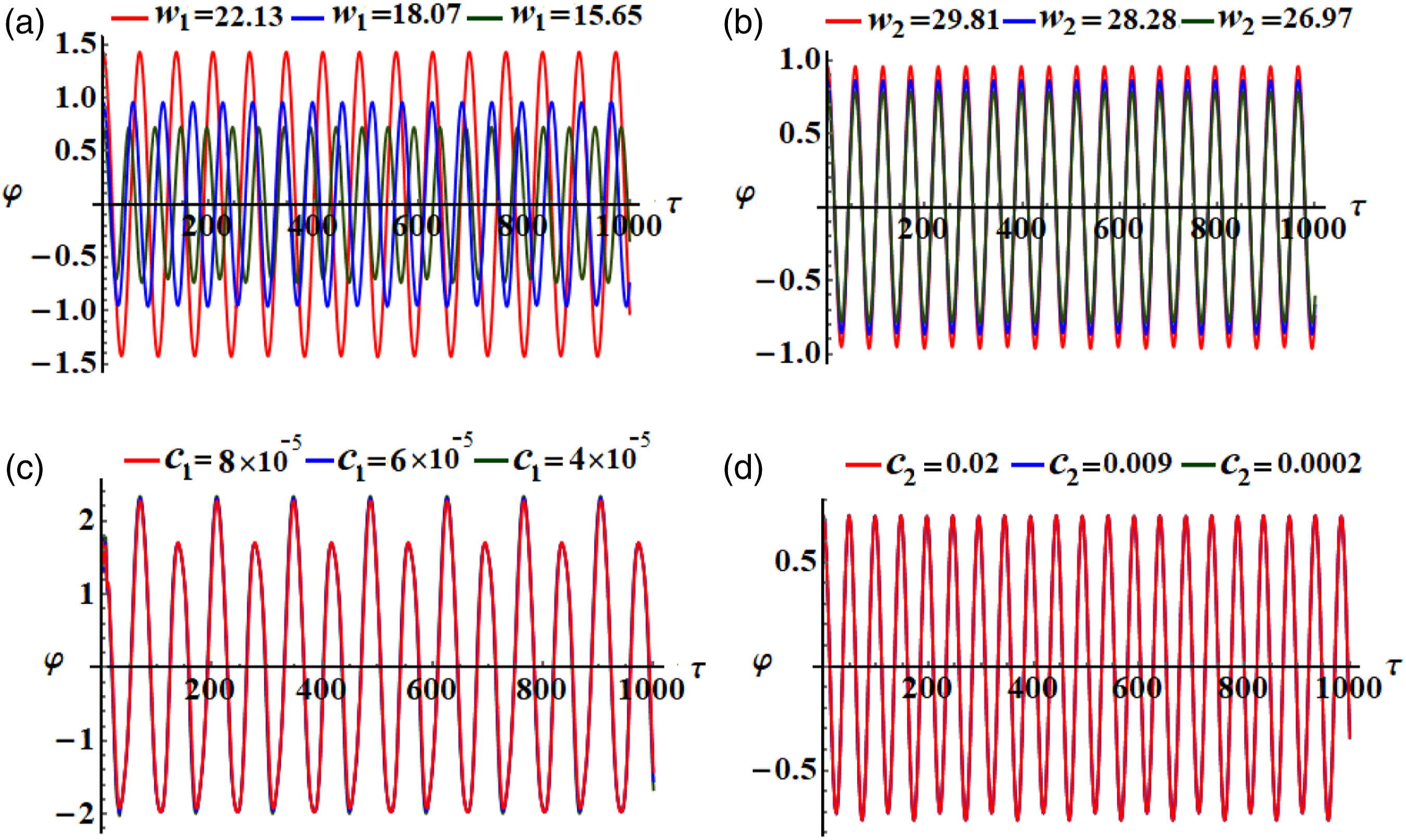
Modulation of the modified phase versus time at (a) , (b) , (c) , and (d) .
The time history of the modified phase at selected values of and .
To investigate the importance of characteristic parameters on the dynamical system behavior, Figures 2–6 are plotted to display the transient responses of the modified amplitudes and the modified phases at the specific values of . These values correspond to the normal length of the pendulum arm , the mass of the magnet of the harvest, and the damping coefficient , as drawn in parts of these figures. Curves of these figures have decay forms when time goes on, which points to the represented curves behave in a stable manner. Figure 2 sketches the variation of with time when . When decreases, the vertical range of the wave describes that increases. A closer look at the parts of Figure 3 shows that they are calculated when and have the values , , and in which the variation of these parameters are shown in parts (a), (b), and (c), respectively. It is obvious to conclude that the increase of and values corresponding to the decreasing of the waves describes besides a decay behavior of these waves till the end of the time interval as seen in parts (a) and (b) of this figure, respectively. On the other hand, we can explore that the increasing of produces decreasing of the amplitudes of the waves, as seen in part (c). The reason of this variation is due to the first equation of the system (50).
The inspection of the indicated curves of Figure 4 shows that the change happened in the amplitude with time when , and have the above different selected values. In general, all plotted waves have a decaying manner with the values of these parameters, while the number of oscillations increases with the change of and than instead of and as seen in parts (a), (b), (c), and (d) of Figure 4. The comparison between curves of Figures 2 and 3 with the curves of Figure 4 explores that the variation of the waves describes has extremely high impulses than the other waves of except for the parts describing the variation of the values of . The main physical reason for these variations is due to the formal construction of the equations of system (50).
On the other side, Figures 5 and 6 introduce the variation of the modified phases versus time when and have distinctive values. It is concluded that the change of the values of has a minor impact on the waves describing the conduct of as drawn in Figure 6(a) and (b), while this change becomes apparent sequentially with the other waves of as shown in the parts (a), (b) of Figure 5. Parts (c) and (d) of the same figures portrait the effect of on the waves of and . The difference between the curves of these parts becomes closer with the variation of than , while the transient responses of the phases behave like standing decay waves through the considered time interval and as obviously from Figures 5(d) and 6(d).
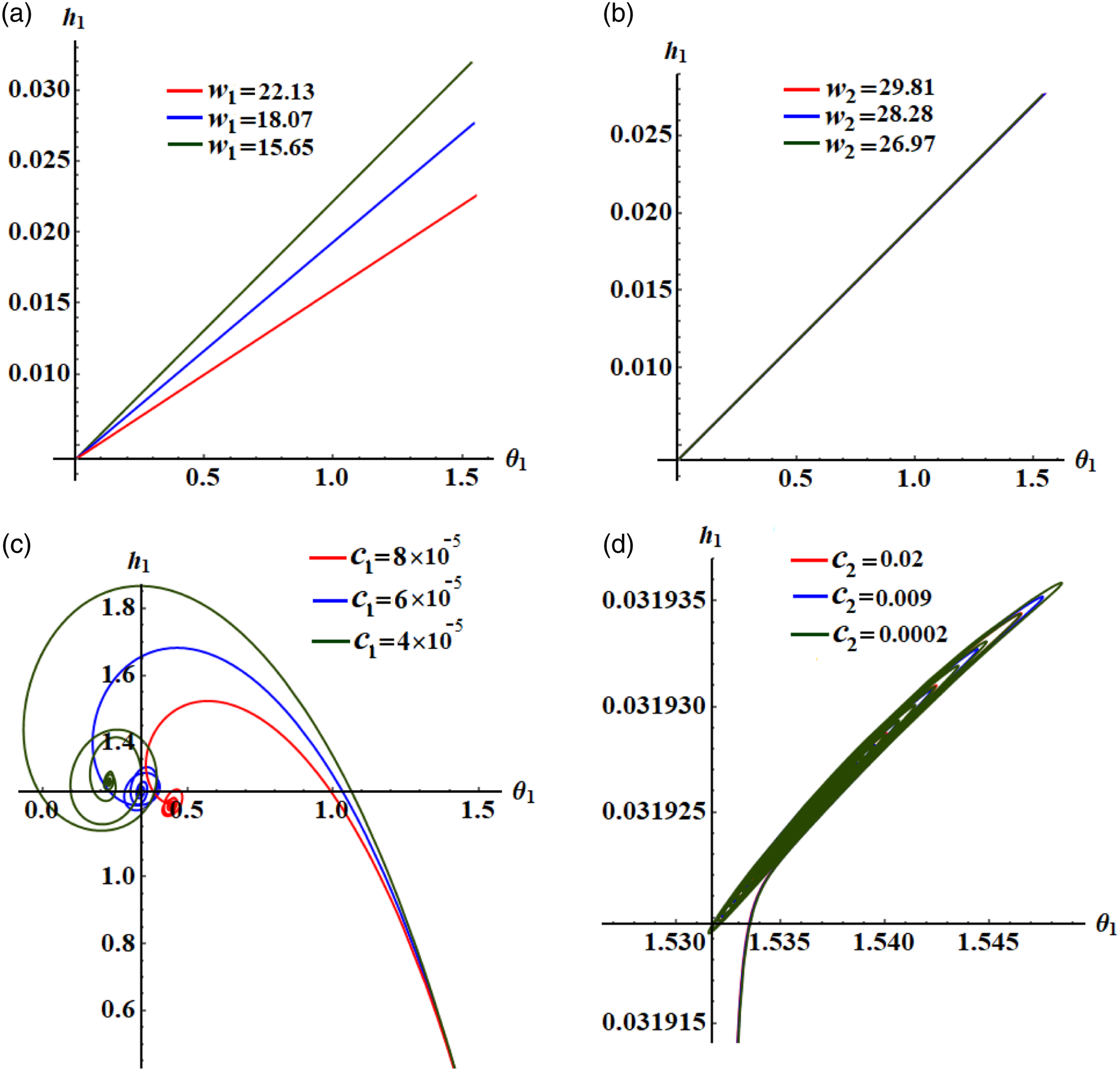
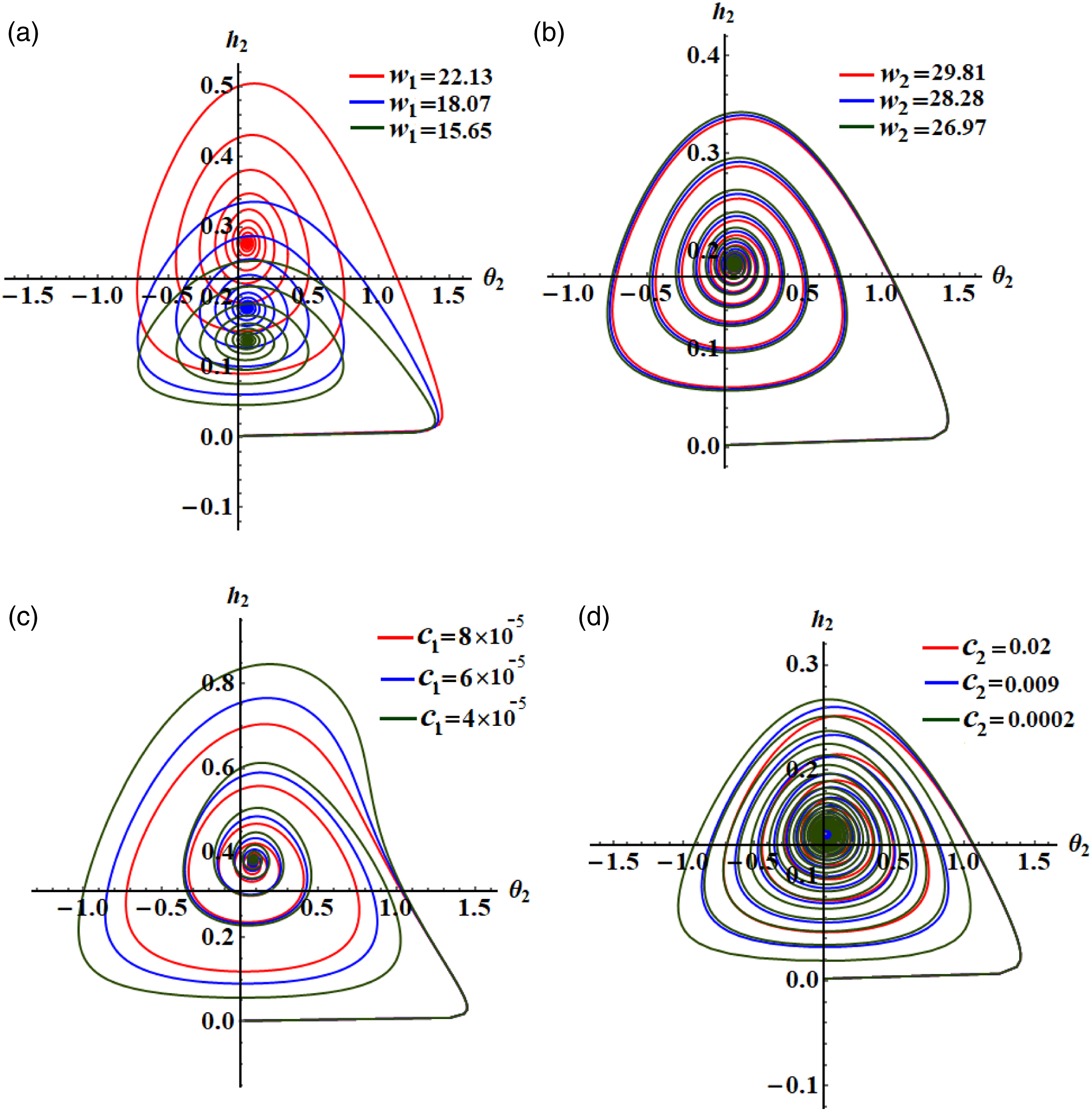
Figures 7 and 8 display the paths of amplitudes via the phases at the same values of the previous data of and . It is notable that the projections of these paths on the space planes have the form of straight lines with the planes when have different values, as shown in parts (a) and (b) of Figure 7. The variation with produces curves that turn on themselves several times at the beginning of variation, while these curves coincide with each other at a certain point at the end of a time interval, as indicated in Figure 7(c) and (d). The plotted curves in Figure 8 displays circular spiral curves are produced when and have different values. In other words, the twisting curves converge on a single point, which describes the stable performances of the amplitude and the phase .
The phase plane at various values of and .
The phase plane is described for distinct values at (a) , (b) , (c) , and (d) .
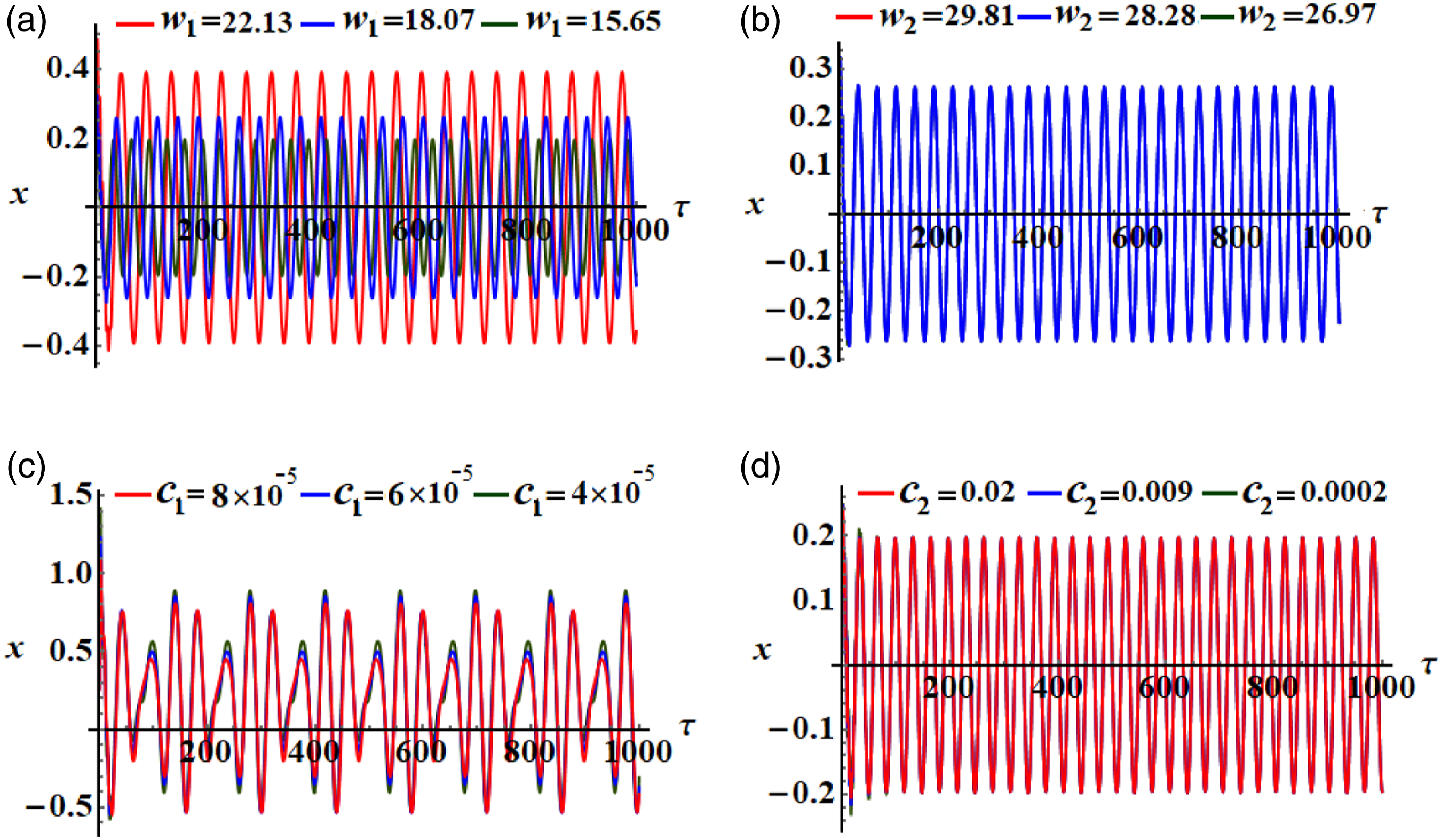
The drawn curves of Figures 9 and 10 explore the time-histories of solutions and . The plotted curves have the forms of periodic waves, which assert the stability of these obtained solutions. A careful examination of these figures shows that when increases, the amplitude of the waves increases, and the oscillations’ number decreases, as seen in parts (a) of these figures. Alternatively, the amplitudes of the waves describing the behaviors of these solutions have a slight effect with the changing of and as noticed in parts (b), (c), and (d) of the same figures.
The effectiveness of the physical parameters and is revealed on the solution .
The effect of variation of and on the solution .
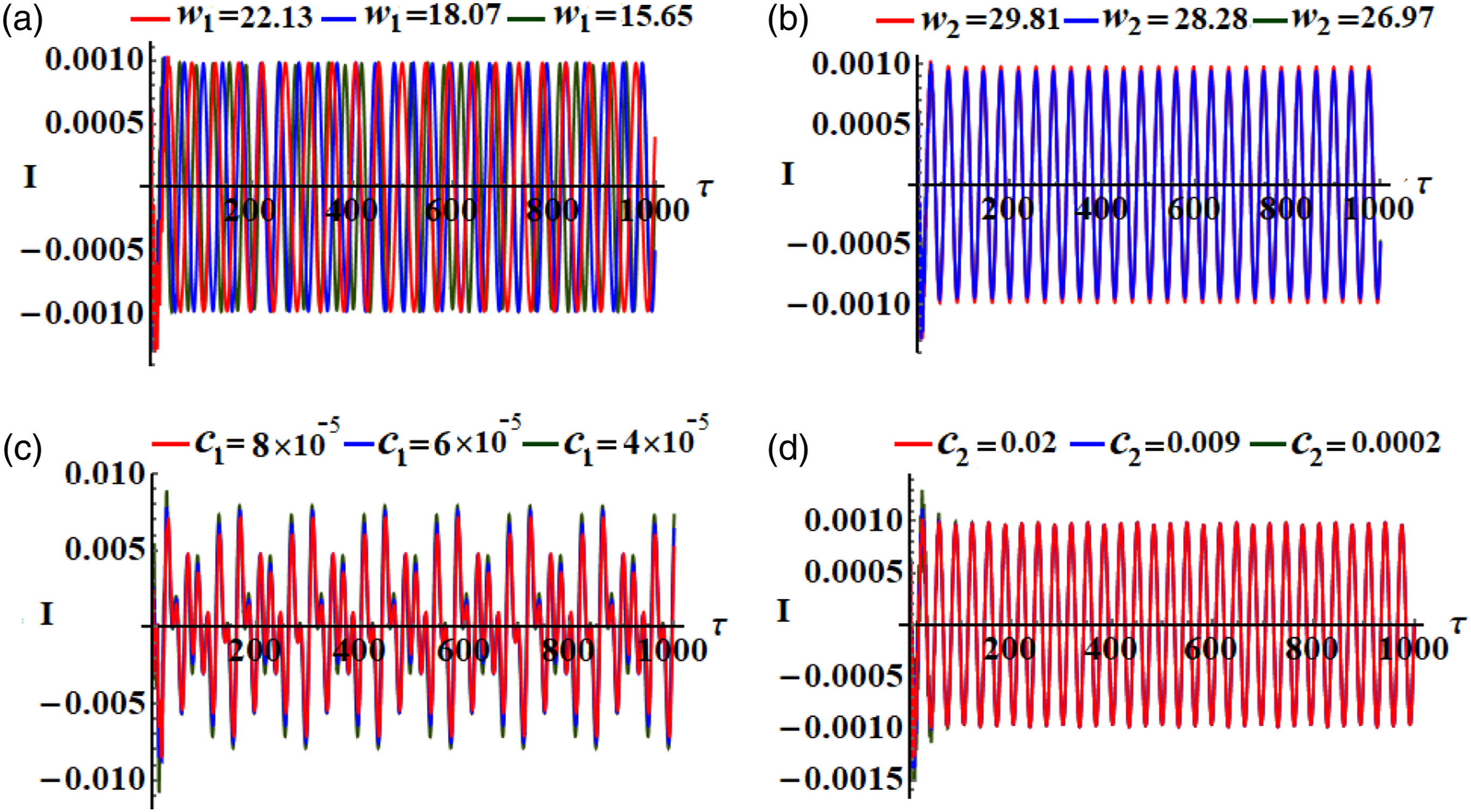
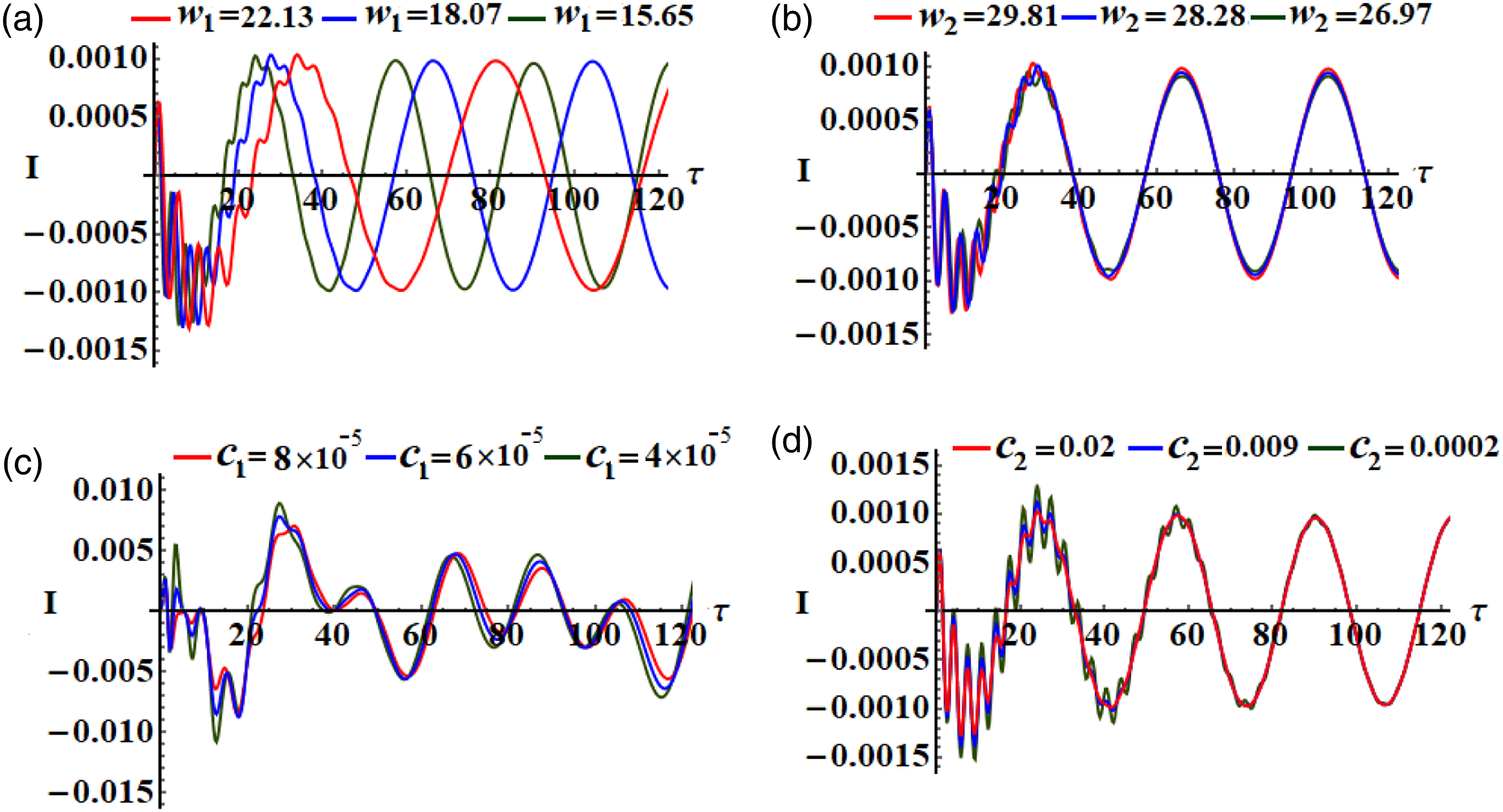
Figure 11 represents the small amplitudes of the current generated by the harvest circuit, leading to low levels of power at the output within milli-watts, which suit the sensor applications. Figure 12 focuses on the shape of the current wave , which reflects the presence of harmonic signals on the fundamental signals at the starting of the waves as transient current due to the RL circuit, and then the current behaves in a stationary form, which is required for uses.
The time history of the current when and have different values.
The influences of and on the behavior of the current at a small interval of time.
Steady-state solutions
This section aims to examine the model’s oscillations at the steady state, that is, when the oscillations of the transient process disappear due to the damping that occurs in the system. In such cases, equation (50) is of great significance in defining for this purpose, where the steady-state conditions correspond to the zero derivatives of the modified phases and the amplitudes . Then, we can write
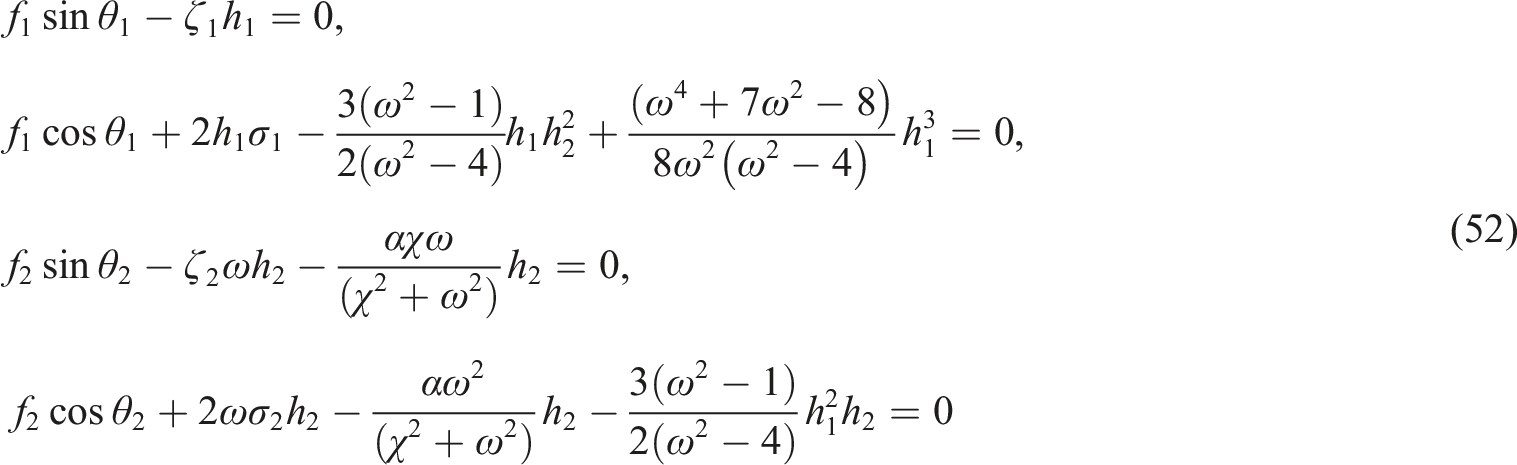
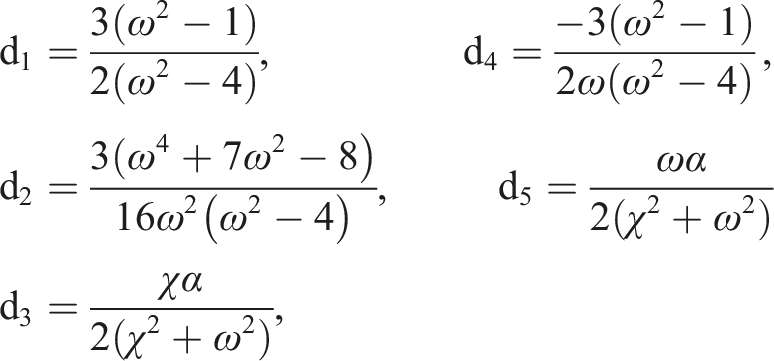
Following these conditions, the following equations can be obtained
At this end, it can be stated that the preceding system contains four algebraic equations in terms of and . If we can remove , we directly acquire the following two equations in terms of the amplitudes and the parameters of detuning
Moreover, the relationship of the amplitude–frequency of current has the form
The steady-state vibrations are considered as important parts of the examination of the stability analysis of the considered system. To achieve such a case, we consider the performance of the system in a region very close to the fixed points. Therefore, the following expressions of and are considered
Here, are the solutions at the steady state, while are the tiny perturbations comparing with . Therefore, substituting (55) into (50) to obtain the following system
Since and are unknown perturbed functions of both the amplitudes and the modified phases, respectively, then, we can write their solutions as a linear superposition of where and are eigenvalues and constants, respectively. If the steady-state solutions and are asymptotically stable, then the real partitions of the roots of the next characteristic equation of (56) should be negative
where have the forms
where
Now, we can write the basic conditions of stability which are in agreement with the Routh–Hurwitz principle22 for the specific steady-state solutions in the forms
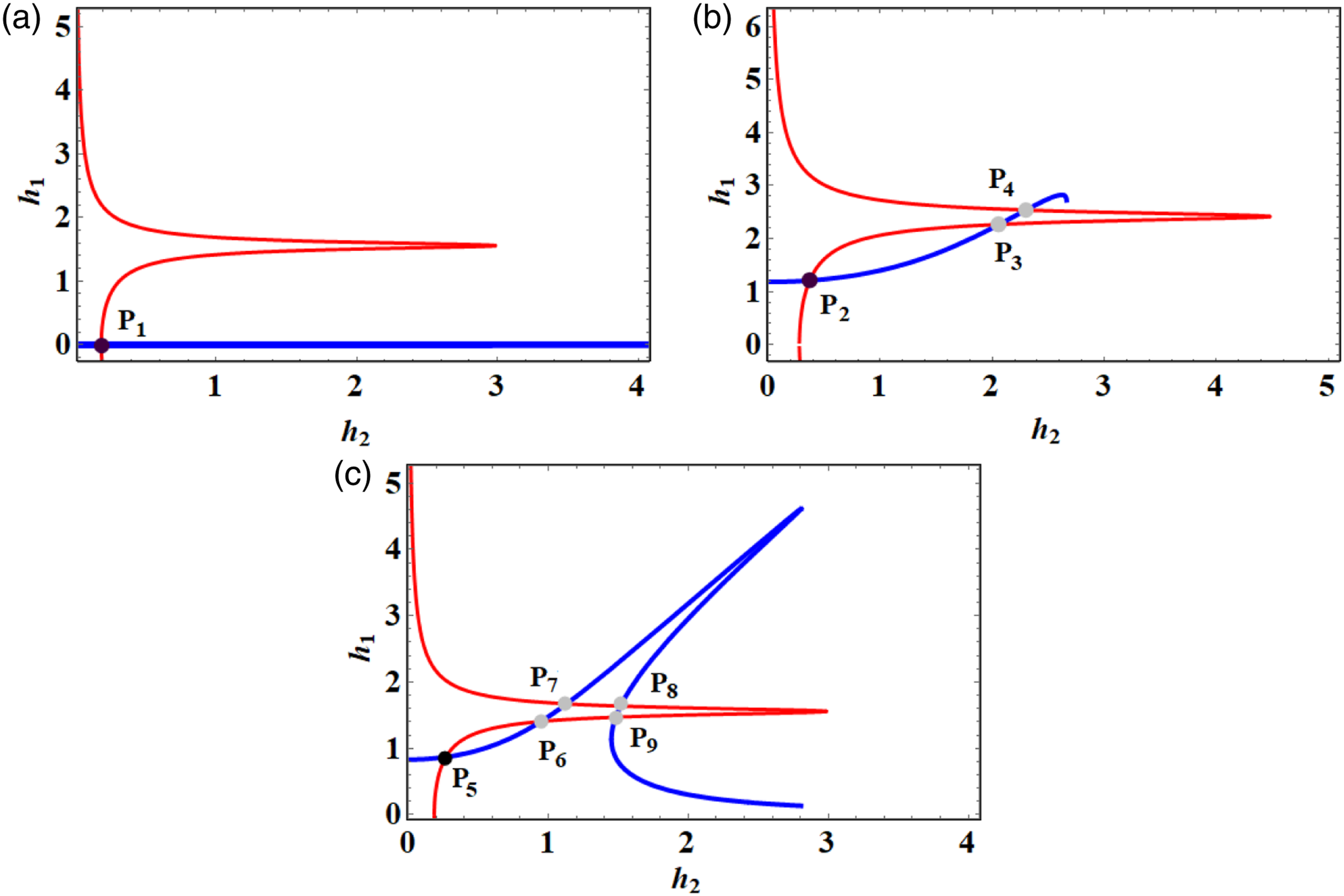
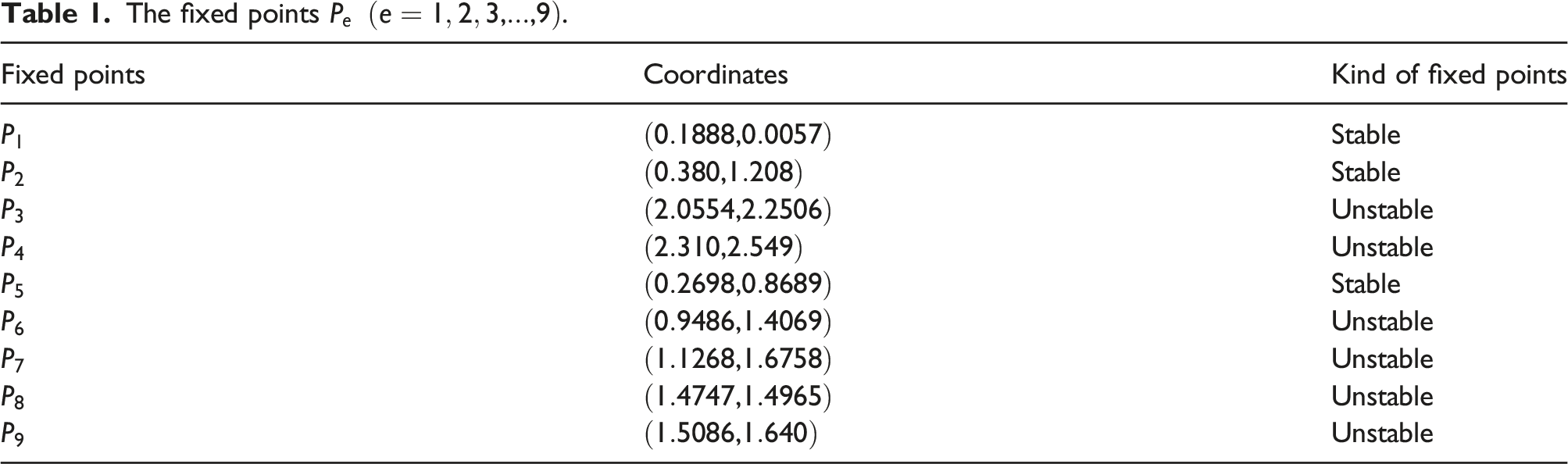
A closer look at the curves of Figure 13 explores the steady-state solutions of the amplitudes and when in the framework of equations of system (53) with the aid of Routh–Hurwitz conditions (59). The blue curves represent the locus of the roots of the first equation of (53), while the red curves indicate the solutions of the second equation of (53). The intersection points of these curves identify the solutions of both equations of (53). The axial amplitudes and adjusting vibration in the steady-state are determined definitively by these points. In addition, oscillations at the steady-state might be stable or unstable. The stable fixed points are marked by small black circles, while the unstable ones are marked by small gray circles. Curves of Figure 13(a) are calculated when , and to obtain one stable fixed point at (see Table 1). Three fixed points in Table 1 are obtained in Figure 13(b) when , and , in which one of them is a stable fixed point and the others are unstable. Finally, to provide a better view about the fixed points, let us shed light on Figure 13(c), which has been sketched at , and . Five fixed points are achieved (see Table 1) which are classified into one stable fixed point, and the others are found unstable.
The intersection of the amplitudes and to obtain the fixed points.
The fixed points .
Fixed points
Coordinates
Kind of fixed points
Stable
Stable
Unstable
Unstable
Stable
Unstable
Unstable
Unstable
Unstable
The analysis of stability
In this section, the non-linear stability approach is used to analyze the stability of the investigated system, in which the stability parameters are carried out as well as the system’s simulation. The detuning parameters , the frequency amplitudes , and the damping coefficient play an important role, among the most important parameters, in the stabilization process. The stability diagrams are plotted for system (56), taking into account the selected values of these parameters. The modified amplitudes are plotted for various parametrical regions, in which its characteristics are submitted via the phase plane paths. The possible steady-state fixed points are sketched in Figures 14 and 15 with the varying values of , where the range of the fixed points is . It is observed from Figure 14(a) that at , the range of stable fixed points is and the unstable one is satisfied in the area . Moreover, the stable and unstable areas of fixed points at are and , respectively. The solid and the dashed curves denote the ranges of stable and unstable fixed points, respectively.
The frequency response of via at when (a) , (b) , (c) , and (d) .
Research on the variation of modified amplitude with the detuning parameter at .
It should be noticed from Figure 14(b) that the possible fixed points are stable in the range while they lose their stabilities in the area . It is observed from Figure 14(c) that the area of stable fixed points at is while the unstable one lies in the range with one critical fixed point, which is the point between two areas. In the same context, we found two peaks at , in which the stable and unstable areas are and , respectively. Finally, the curves of Figure 14(d) reveal that we have only one critical fixed point at with stable and unstable ranges and , respectively. Based on the preceding presented analysis of Figure 14, we conclude that the amplitude via has the same areas of stability and instability as seen in parts of Figure 15. The connection points between these curves characterize the critical values of the celebrity wave at which transcritical bifurcation is done due to one fixed point.
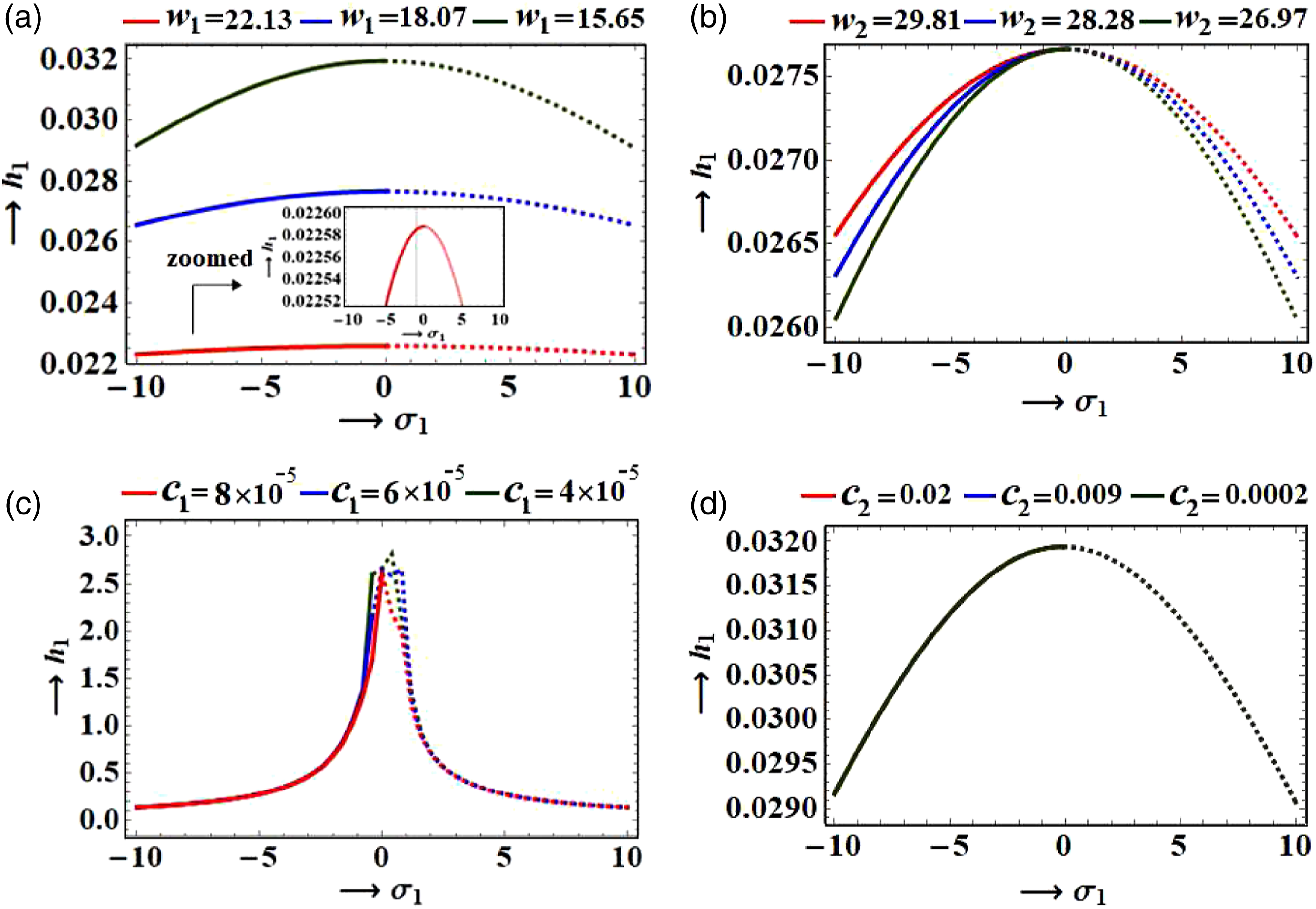
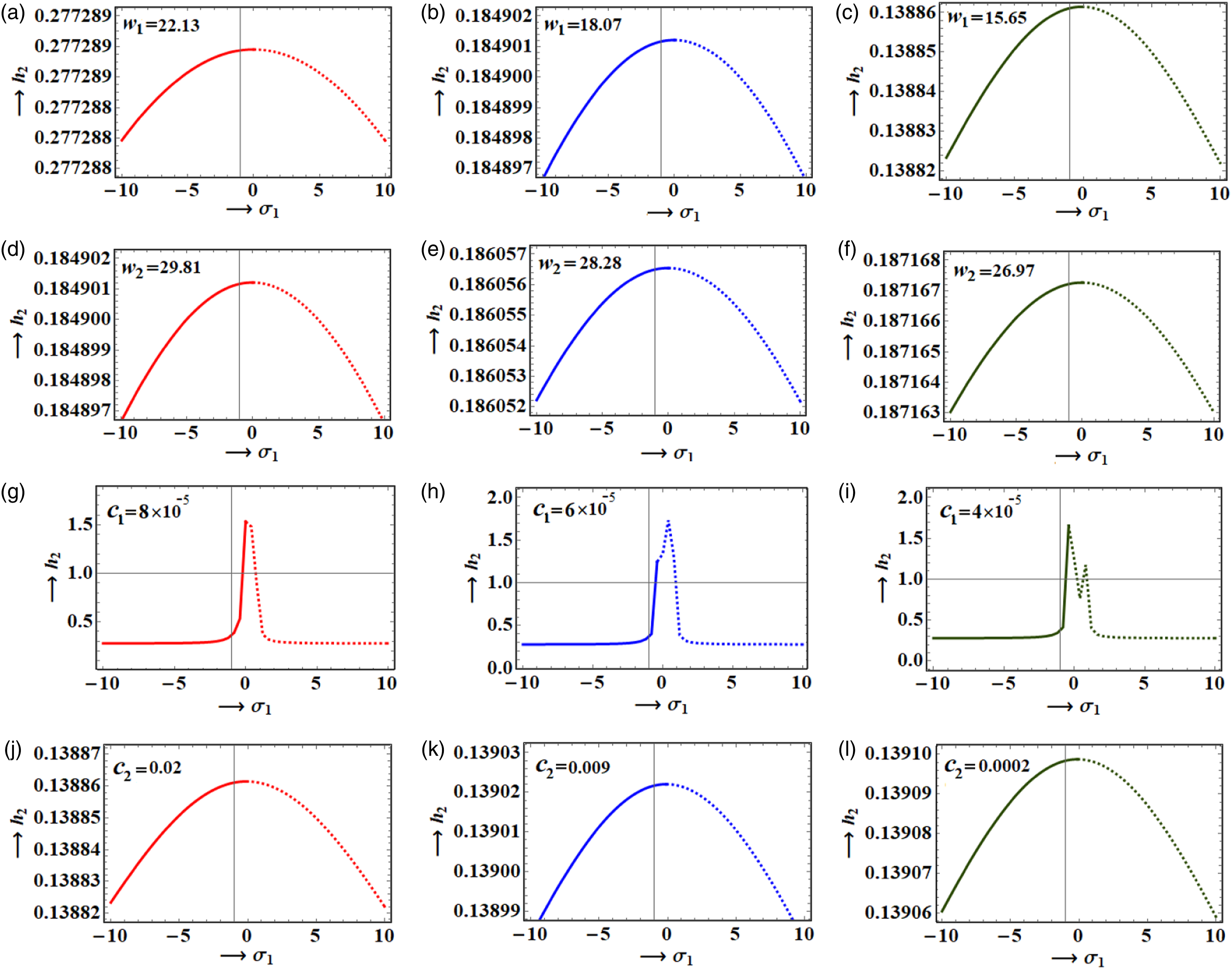
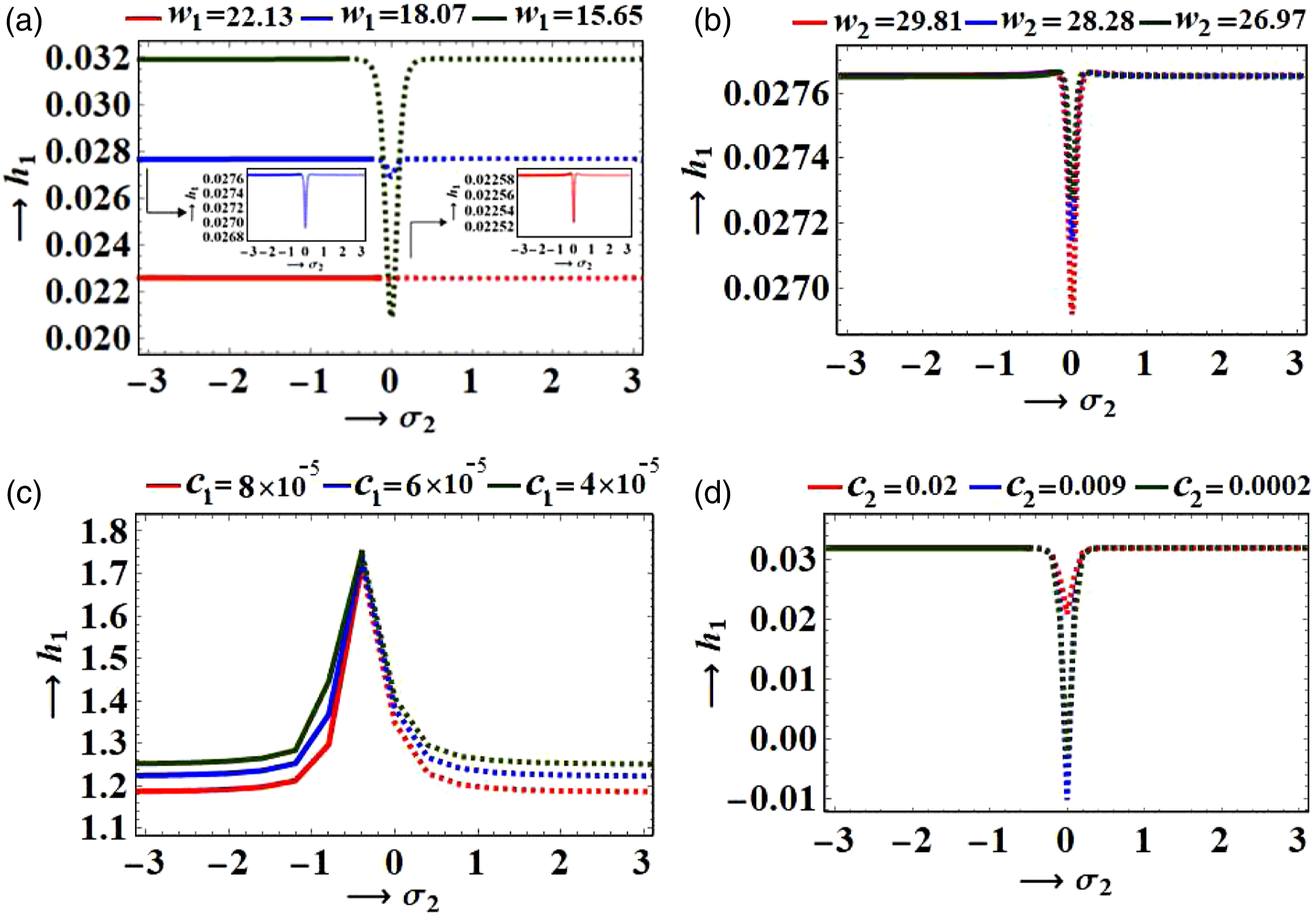
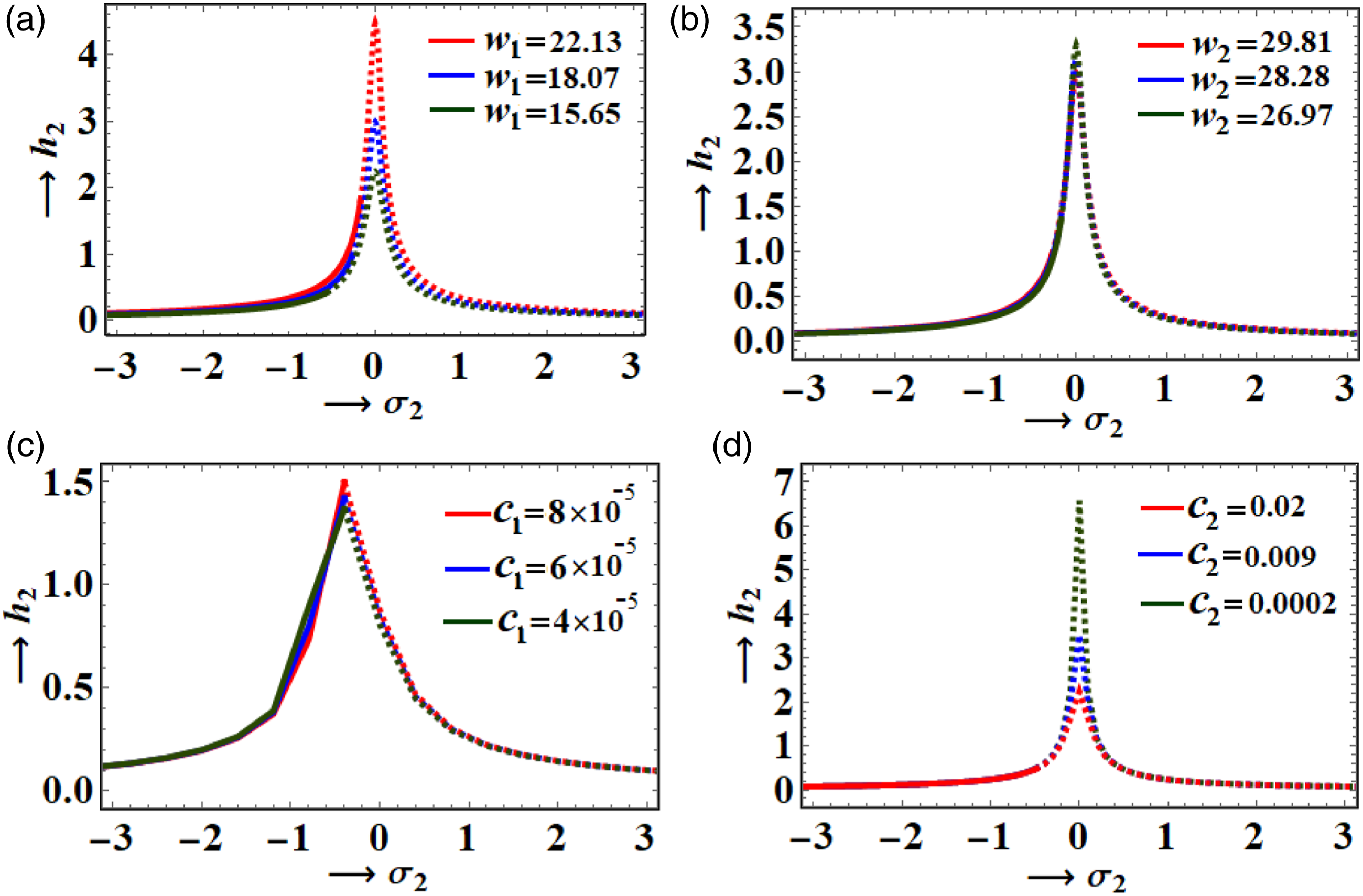
Figures 16 and 17 display the frequency response variation of via the detuning parameter for different values of and through the range at . The aim of the graphs is to generate the results of Figure 16, to examine the influence of and on the frequency response of versus . Each curve has only one critical fixed point separated between the stable areas and unstable at as shown in part (a) of Figure 16. It is found that at , the stable and unstable areas are and , respectively, while at , the stable and unstable areas are and . Later, at , one observes that the stable and unstable areas will be and , respectively.
The frequency response of versus at when (a) , (b) , (c) , and (d) .
The variation of the modified amplitude versus the detuning parameter at .
It is remarked from the curves of Figure 16(b) that there exists only one critical point and one peak when in which the stability and instability areas are found in the ranges and , respectively. Here, we can deduce that when increases, the peaks are slightly shifted down, as seen in Figure 16(b). The reason goes back to the realization of the Routh–Hurwitz conditions during the investigated range and to the equations of modulation (56).
The inspection of the curves displayed in Figure 16(c) shows that there is only one critical fixed point at besides several peaks on these curves, in which the stable and unstable areas lie in the ranges and , respectively. On the other hand, at , the stable and unstable areas are found in the ranges and , respectively. The same observations can also be applied to the corresponding parts of Figure 17.
Conclusion
The vibration reduction and the energy harvesting of a spring-pendulum of a novel dynamical system are investigated. The structure of the pendulum is adjusted using an independent electromagnetic harvesting device. The harvesting is based on a magnet in an oscillating coil. The harvester’s energy gathering, as well as its vibration mitigation performance, has been improved. Lagrange’s equations are applied to derive the EOM of this system, considering the influence of external forces and moments. Precise standardization of the approximate solutions is obtained using MSM. All secular terms are averted to acquire the solvability requirements and the modulation equations in light of the examination of the external resonance condition. The stability conditions are gained utilizing the Routh–Hurwitz conditions, in which the stability and instability regions are plotted and analyzed according to the determination of stable or unstable fixed points. The temporal histories of the modified phases and amplitudes generalized coordinates, frequency responses curves, and the stability and instability areas are drawn to expose the impact of the various parameters on the attitude of the studied system, in which the system displays transcritical bifurcations at certain values of . The relevance of this work lies in its current uses in the control sensors.
Data availability statement
As no datasets were generated or processed during the current study, data sharing was not applicable to this paper.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by Shaanxi Province Educational Science Planning Project (SGH20Q207).
ORCID iDs
Chun-Hui He
Dan Tian
Tarek S Amer
Abdallah A Galal
References
1.
NathSDebnathNChoudhuryS. Methods for improving the seismic performance of structures: a review, IOP Conf Ser Mater Sci Eng2018; 377(1): 012141.
2.
Den HartogJP. Mechanical vibrations. Courier Corporation, 1985.
3.
GongXPengCXuanS, et al.A pendulum-like tuned vibration absorber and its application to a multi-mode system. J Mech Sci Technol2012; 26(11): 3411–3422.
4.
MuraltP. Ferroelectric thin films for micro-sensors and actuators: a review. J Micromech Microeng2000; 10(2): 136–146.
5.
ZhouWLiaoWHLiWJ. Analysis and design of a self-powered piezoelectric microaccelerometer. Proc SPIE2005; 5763: 233–240.
6.
KoenemanPBBusch-VishniacIJWoodK L. Feasibility of micro power supplies for MEMS. J Microelectromechanical Syst1997; 6(4): 355–362.
7.
ParadisoJAStarnerT. Energy scavenging for mobile and wireless electronics. IEEE Pervasive Comput2005; 4(1): 18–27.
8.
MizunoMChetwyndDG. Investigation of a resonance microgenerator. J Micromech Microeng2003; 13(2): 209–216.
9.
MitchesonPDYeatmanEMRaoGK, et al.Energy harvesting from human and machine motion for wireless electronic devices. Proc IEEE2008; 96(9): 1457–1486.
10.
NaruseYMatsubaraNMabuchiK, et al.Electrostatic micro power generation from low-frequency vibration such as human motion. J Micromech Microeng2009; 19(9): 094002.
11.
GuL. Low-frequency piezoelectric energy harvesting prototype suitable for the MEMS implementation. Microelectronics J2011; 42(2): 277–282.
12.
GalchevTAktakkaEEKimH, et al.A piezoelectric frequency-increased power generator for scavenging low-frequency ambient vibration. Proc MEMS Hong Kong2010: 1203–1206.
13.
NiaEMZawawiNAWASinghBSM. A review of walking energy harvesting using piezoelectric materials. IOP Conf Ser Mater Sci Eng2017; 291(1): 012026.
14.
LiuFZhangTHeCH, et al.Thermal oscillation arising in a heat shock of a porous hierarchy and its application. Facta Univ Ser Mech Eng2021. DOI: 10.22190/FUME210317054L.
15.
El-DibYO. Multiple scales homotopy perturbation method for nonlinear oscillators. Nonlinear Sci Lett A2017; 8(4): 352–364.
16.
HeCHLiuCHeJH, et al.Passive atmospheric water harvesting utilizing an ancient Chinese ink slab and its possible applications in modern architecture. Facta Univer: Mech Eng2021; 19(2): 229–239, DOI: 10.22190/FUME201203001H.
17.
TranNGhayeshMHArjomandiM. Ambient vibration energy harvesters: a review on nonlinear techniques for performance enhancement. Int J Eng Sci2018; 127: 162–185.
18.
TaoKLyeSWMiaoJ, et al.Design and implementation of an out-of-plane electrostatic vibration energy harvester with dual-charged electret plates. Microelectronic Eng2015; 135: 32–37.
19.
AbdelkefiABarsalloNTangL, et al.Modeling, validation, and performance of low-frequency piezoelectric energy harvesters. J Intell Mater Syst Structures2014; 25(12): 1429–1444.
20.
StarostaRSypniewska-KamińskaGAwrejcewiczJ. Asymptotic analysis of kinematically excited dynamical systems near resonances. Nonlinear Dyn2012; 68: 459–469.
21.
AmerTSBekMAAbouhmrMK. On the vibrational analysis for the motion of a harmonically damped rigid body pendulum. Nonlinear Dyn2018; 91: 2485–2502.
22.
AbadyIMAmerTSGadHM, et al.The asymptotic analysis and stability of 3DOF non-linear damped rigid body pendulum near resonance. Ain Shams Eng J2022; 13: 101554. DOI: 10.1016/j.asej.2021.07.008.
23.
AmerTSGalalAAAbolilaAF. On the motion of a triple pendulum system under the influence of excitation force and torque. Kuwait J Sci2021; 48(4): 1–17. DOI: 10.48129/kjs.v48i4.9915.
24.
JiangWHanXChenL, et al.Improving energy harvesting by internal resonance in a spring-pendulum system. Acta Mech Sin2020; 36618–623.
25.
KęcikK. Energy harvesting of a pendulum vibration absorber. Prz Elektrotech2013; 89(7): 169–172.
26.
KecikKBrzeskiPPerlikowskiP. Non-Linear dynamics and optimization of a harvester-absorber system. Int J Struct Stab Dyn2017; 17(5): 1740001, (15 pages).
27.
KecikK. Assessment of energy harvesting and vibration mitigation of a pendulum dynamic absorber. Mech Syst Signal Process2018; 106: 198–209.
28.
KecikKMituraA. Energy recovery from a pendulum tuned mass damper with two independent harvesting sources. Int J Mech Sci2020; 174: 105568.
29.
WangXWuHYangB. Nonlinear multi-modal energy harvester and vibration absorber using magnetic softening spring. J Sound Vibration2020; 476: 115332.
30.
KecikK. Numerical study of a pendulum absorber/harvester system with a semi‐active suspension. ZAMM – J Appl Math Mech2021; 101(1): e202000045.
31.
KecikK. Simultaneous vibration mitigation and energy harvesting from a pendulum-type absorber. Commun Nonlinear Sci Numer Simulation2021; 92: 105479.
32.
ZhangASorokinVLiH. Energy harvesting using a novel autoparametric pendulum absorber-harvester. J Sound Vibration2021; 499: 116014.
33.
AnurakpanditTTownsendNCWilsonPA. The numerical and experimental investigations of a gimballed pendulum energy harvester. Int J Non-Linear Mech2020; 120: 103384.
34.
KecikKMituraA. Theoretical and experimental investigations of a pseudo-magnetic levitation system for energy harvesting. Sensors2020; 20(6): 1623.
35.
MarszalMWitkowskiBJankowskiK, et al.Energy harvesting from pendulum oscillations. Int J Non-Linear Mech2017; 94: 251–256.
36.
MauryaDKumarPKhaleghianS, et al.Energy harvesting and Strain sensing in smart tire for next generation autonomous vehicles. Appl Energy2018; 232: 312–322.
37.
ShaikhF KZeadallyS. Energy harvesting in wireless sensor networks: a comprehensive review. Renew Sustain Energy Rev2016; 55: 1041–1054.
38.
DongLWenCLiuY, et al.Piezoelectric buckled beam array on a pacemaker lead for energy harvesting. Adv Mater Tech2019; 4(1): 1800335.
39.
BalguvharSBhallaS. Evaluation of power extraction circuits on piezo-transducers operating under low-frequency vibration-induced strains in bridges. Strain2019; 55(3): 1–18.
40.
AwrejcewiczJ. Classical mechanics: dynamics. New York: Springer-Verlag, 2012.
41.
HeJ-HAmerTSElnaggarS, et al.Periodic property and instability of a rotating pendulum system. Axioms2021; 10: 1912021. DOI: 10.3390/axioms10030191.
42.
WangK-LWangK-JHeC-H. Physical insight of local fractional calculus and its application to fractional KdV-Burgers-Kuramoto equation. Fractals2019; 27(7): 1950122. DOI: 10.1142/S0218348X19501226.
43.
RouillardVLambM J. Using the Weibull distribution to characterise road transport vibration levels. Packag Technol Sci2020; 33: 255–266, DOI: 10.1002/pts.2503.
44.
HosoyamaATsudaKHoriguchiS. Simultaneous three‐translational‐axis vibration test that considers non‐Gaussianity. Packag Technol Sci2021; 35: 119–134. DOI: 10.1002/pts.2614.
45.
LambMJRouillardV. On the parameters that influence road vehicles vibration levels. Packag Technol Sci2021; 34: 525–540, DOI: 10.1002/pts.2592.
46.
TianDAinQ-TAnjumN, et al.Fractal N/MEMS: from pull-in instability to pull-in stability. Fractals2021; 29: 2150030.
47.
GalalAAAmerTSEl-KaflyH, et al.The asymptotic solutions of the governing system of a charged symmetric body under the influence of external torques. Results Phys2020; 18: 103160.
48.
HeJ-HAmerTSAbolilaAFGalalAA. Stability of three degrees-of-freedom auto-parametric system. Alexandria Engineering Journal2022; DOI: 10.1016/j.aej.2022.01.064.