
Abstract
Time-delay feedback control can effectively broaden the damping frequency band and improve the damping efficiency. However, the existing time-delay feedback control strategy has no obvious effect on multi-frequency random excitation vibration reduction control. That is, when the frequency of external excitation is more complicated, there is no better way to obtain the best time-delay feedback control parameters. To overcome this issue, this paper is the first work of proposing an optimal calculation method that introduces stochastic excitation into the process of solving the delay feedback control parameters. It is a time-delay control parameter with a better damping effect for random excitation. In this paper, a 2 DOF one-quarter vehicle suspension model with time-delay is studied. First, the stability interval of time-delay feedback control parameters is solved by using the Lyapunov stability theory. Second, the optimal control parameters of the time-delay feedback control under random excitation are solved by particle swarm optimization (PSO). Finally, the simulation models of a one-quarter vehicle suspension simulation model are established. Random excitation and harmonic excitation are used as inputs. The response of the vehicle body under the frequency domain damping control method and the proposed control method is compared and simulated. To make the control precision higher and the solution speed faster, this paper simulates the model by using the precise integration method of transient history. The simulation results show that the acceleration of the vehicle body in the proposed control method is 13.05% less than the passive vibration absorber under random excitation. Compared with the time-delay feedback control optimized by frequency response function, the damping effect is 12.99%. The results show that the vibration displacement, vibration velocity, and vibration acceleration of the vehicle body are better than the frequency domain function optimization method, whether it is harmonic excitation or random excitation. The ride comfort of the vehicle is improved obviously. It provides a valuable tool for time-delay vibration reduction control under random excitation.
Introduction
In nature, vibration is inevitable. When a car or boat travels on a rough road or the water, it will vibrate. Aircraft vibrate during takeoff, landing, and in-flight when they encounter turbulence. These vibrations can lead to motion sickness, seasickness, and so on, which affects the physical and mental health of passengers. Long-term exposure to such a vibration environment will also cause people to suffer from occupational diseases such as lumbar strain and gastric ptosis.1,2 So, in recent years, vibration control has become the focus of scholars. The emergence of active vibration control greatly alleviates the damage caused by vibration. Active control is to drive the actuator to exert a certain influence on the control target, thereby suppressing vibration. It has been widely used in vehicles, ships, aerospace, building structures, and other fields.3–7
With the development of science and technology, the requirements of vibration environment, product, and structure vibration characteristics in industrial production are higher. The traditional passive control is more and more difficult to meet the needs of the industry due to its small frequency range.8–13 Therefore, many scholars began to study active vibration control. According to the vibration signal detected by the sensor, the optimal control strategy is applied in the active control process. The actuators are driven by real-time calculation to exert a certain influence on the control target. It achieves the purpose of suppressing or eliminating vibration. Active control has the advantages of a good damping effect and strong adaptability. But in the process of active control, time-delay becomes a problem that cannot be ignored. In most cases, this time-delay is small but still causes the actuator to feed energy to the system when it is not needed. 14 This makes the active control process more complex and changeable. Finally, the control effect of the system is weakened, and even chaos or bifurcation phenomenon occurs in the controlled system.
In the 1990s, Olgac N. et al.15,16 proposed for the first time to use time-delay as active control for vibration reduction control. The results show that the vibration of the main system under single-frequency excitation can be almost eliminated by selecting appropriate time-delay control. The Olgac N. team conducted theoretical research on time-delay feedback control with different feedback forms with time-delay. Compared with other active control methods, time-delay active control avoids the bad influence of time-delay on the control effect. It requires less input energy. The research of active damping control using time-delay has made great progress in recent years. Researchers have applied time-delay active control to different engineering fields. Jalili et al. 17 applied time-delay feedback control to beam structure. The stability region of the system is calculated. The experimental results show that the time-delay feedback control can effectively reduce the vibration of trabecular calculated. The Alhazza et al.18,19 studied the nonlinear free vibration of beams based on acceleration time-delay feedback control. A numerical model of nonlinear vibration of a cantilever beam under parametric excitation is developed. Mirafzal et al. 20 optimized the time-delay control parameters of active vibration control of cantilever beam through genetic algorithm and carried out relevant experimental control. Kandil A. et al. 21 adopted the time-delay positive position feedback (PPF) controller to reduce the nonlinear vibration of the rotating blade power system. Shao S. et al. 22 studied the influence of time-delay feedback controlled electrically driven resonators on the stability, amplitude, and period of the main system in the field of Mismother. Chen L. et al.23,24 used numerical simulation and simulation experiment design to study a flexible manipulator with time-delay feedback control. It is found that the flexible manipulator has better motion effect than the control without time-delay. Above research shows that the time-delay feedback control can effectively widen the damping frequency band of the passive control. By giving the best time-delay feedback control parameters, the vibration reduction effect of harmonic excitation is good. For the research of time-delay feedback damping control under random excitation, the existing methods mainly use the frequency response function of the system as the optimization objective function to optimize the calculation. The numerical results show that the time-delay feedback parameters obtained by the modified method have no obvious effect on the vibration reduction of random excitation. This is mainly because the external excitation is not considered in the process of parameter optimization when the delay feedback control parameters are optimized. It means that the solution of the delay feedback parameter has little relation with the external excitation. As a result, the time-delay control parameters obtained by the existing optimization methods are only effective for single-frequency excitation. For more complex incentives, the effect is not obvious. To improve the effect of time-delay feedback control on random excitation, it is necessary to find a new method to solve the time-delay control parameters.
To solve the above problems, this paper proposes a novel time-delay feedback control parameter optimization method, in which a random excitation is introduced into the time-delay feedback control parameter optimization method. A 2 DOF 1/4 vehicle suspension model is developed. First, the stability interval of time-delay control parameters is studied according to both Lyapunov stability theory and the characteristic analysis method. 25 Then, the precise integration algorithm of transient history is used to solve the delay dynamic differential equations of the system. The quantitative relationship among external excitation, time-delay control parameters, and time-domain vibration response of the system is established. The weighted root mean square (RMS) value of the time-domain vibration response of the system is used as the optimization objective function. Time-delay feedback control parameters are used as optimization variables. For the problem studied in this paper, the particle swarm optimization method is improved to solve the time-delay control parameters of the time-domain vibration response of the vehicle body’s under random excitation. Finally, a simulation model is established to verify the performance of the proposed method.
Establishment of the mechanical model
The mechanical model and mathematical model of vehicles are complex and changeable in the actual operating system, and there are a lot of uncertainties. Considering the universality of the 2 DOF vehicle suspension model and the characteristics of easy research, and aiming at the problems studied in this paper, the vehicle suspension model is reasonably simplified, and a 2 DOF vehicle suspension model including time-delay is established, as shown in Figure 1. 1/4 vehicle suspension system with time-delay feedback control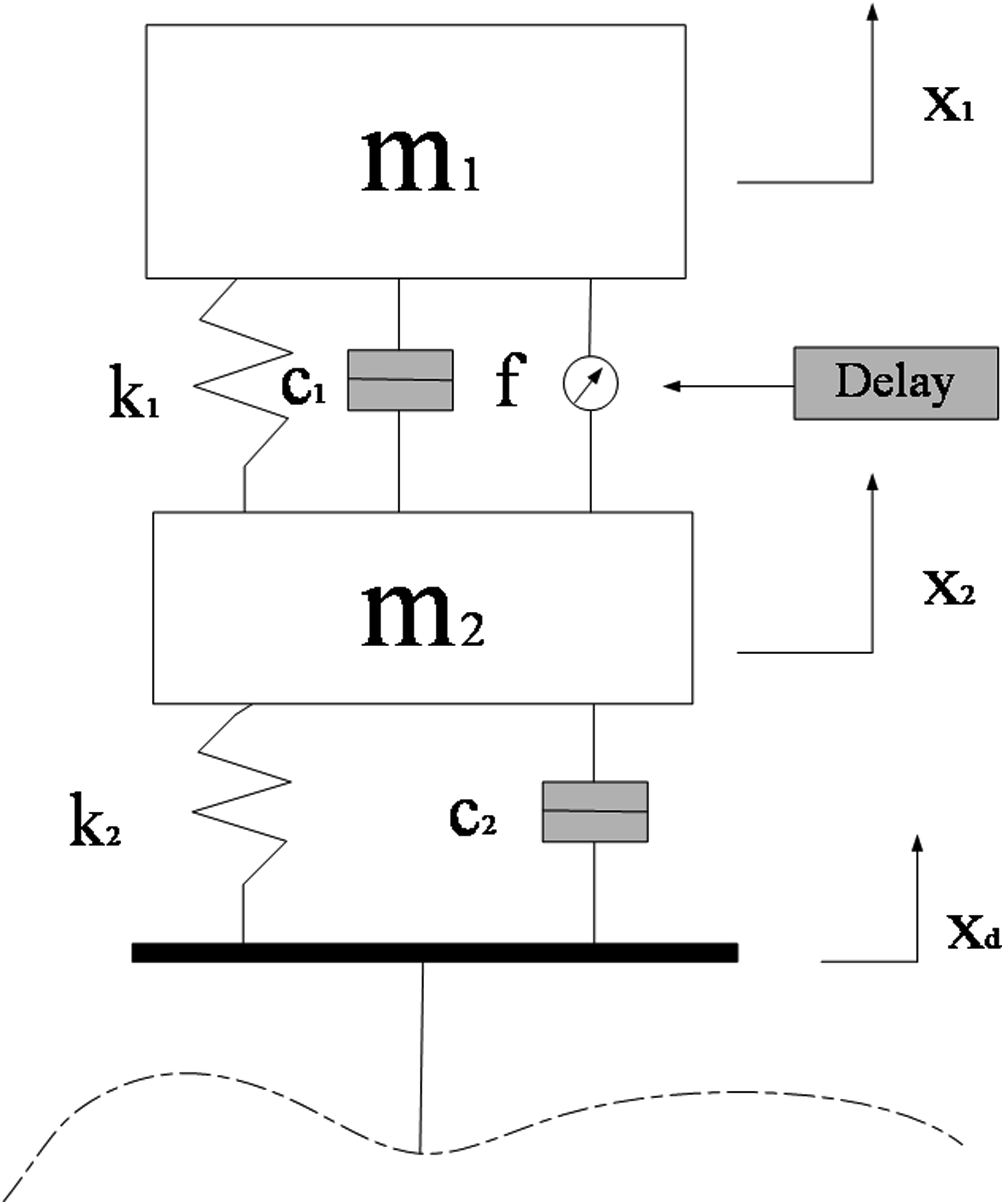
Using Lagrange’s equation, the differential equation of motion of the vehicle suspension with time-delay is obtained.

This paper is based on the wheel displacement feedback as the active control force of the actuator.

Stability analysis
It is generally believed that time-delay is always negative to the stability of the control system (the greater the time-delay, the less stable the system is). This intuition also indirectly makes time-delay considered a harmful factor. However, with the development of time-delay research, more and more studies have shown that time-delay can also be effectively used as an active control item in the active control technology of vibration. After the time-delay feedback control is applied, the value of the feedback gain coefficient and the time-delay determines the stability of the system. Therefore, we need to analyze the stability of the system.
Because of the complexity of time-delay, the understanding of time-delay dynamical systems is far less than that of ordinary dynamical systems. In general, the characteristic equations of time-delay systems are transcendental equations with exponential functions. The study of the transcendental equation roots is not an easy task. After the introduction of time-delay feedback control, a small time-delay has a great influence on the stability and control precision of the system.26,27
To verify the influence of time-delay feedback control parameters on the acceleration amplitude-frequency characteristics of the vehicle body. The frequency domain response of vehicle body acceleration to road speed under the action of time-delay feedback control parameters is researched as equation (3). Frequency response function curve (as shown in Figure 2). Frequency response function curve.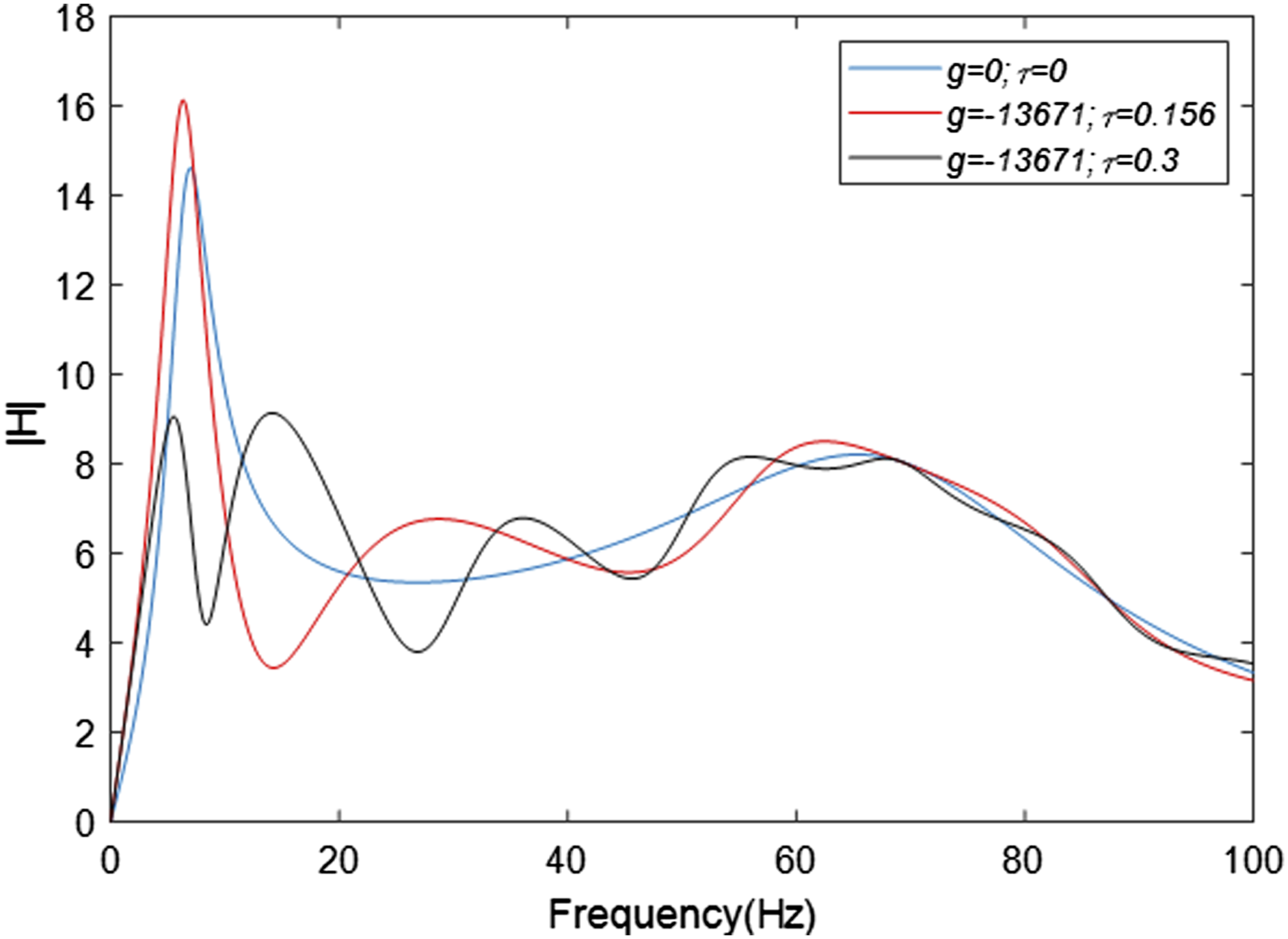

It can be seen from the frequency response characteristic curve of the body acceleration that when the control g = 0; τ = 0 is not increased, the maximum value of the amplitude-frequency characteristic of the body is mainly within 4–14 Hz. After introducing time-delay feedback control, when g = −13,671; τ = 0.6, the peak value of the amplitude-frequency characteristic of the vehicle body decreases; when g = −13,671; τ = 0.156, the amplitude-frequency characteristic value of the vehicle body increases. Therefore, even a small change in time-delay can lead to an increase or decrease in the vibration response of the vehicle body. Therefore, this round of paper first obtains the stability interval of the time-delay through stability analysis, and then solves the optimal time-delay and the feedback gain coefficient, to achieve a more stable damping effect.
There are two main methods for the stability analysis of time-delay systems: the frequency domain method and the time-domain method. This paper chose the Lyapunov stability theory to analyze the stability of the system and seek the time-delayed control parameters by the pure virtual roots of the system characteristic equation when the system is critically stable.
According to the theory of delay-type ordinary differential equations, the form solution x=Xe
λt
of the differential equation (1) is brought into the equation to obtain the characteristic equation.

When all the characteristic roots of the characteristic equation (4) are located on the left half plane of the complex plane, the system is a progressive stability system. The stable time-delay control parameter obtained by this method has inevitable conservatism property, which is the sufficient condition for system stability. The time-delay is stable when time-delay control parameters are chosen in the stability interval, and the time-delay feedback control with parameters outside the interval also may be stable.
When the eigenvalue λ of the equation is pure virtual root λ=iω, the equation is a critical stable state. Bring λ=iω into equation (4), you can get

Euler formula is

Substituting the transcendental term in equation (5) through Euler formula (6), and separating the real part and the imaginary part. The real part and the imaginary part are equaled to 0, respectively, then calculate the cos (ωτ) and sin (ωτ) are

According to the triangle formula

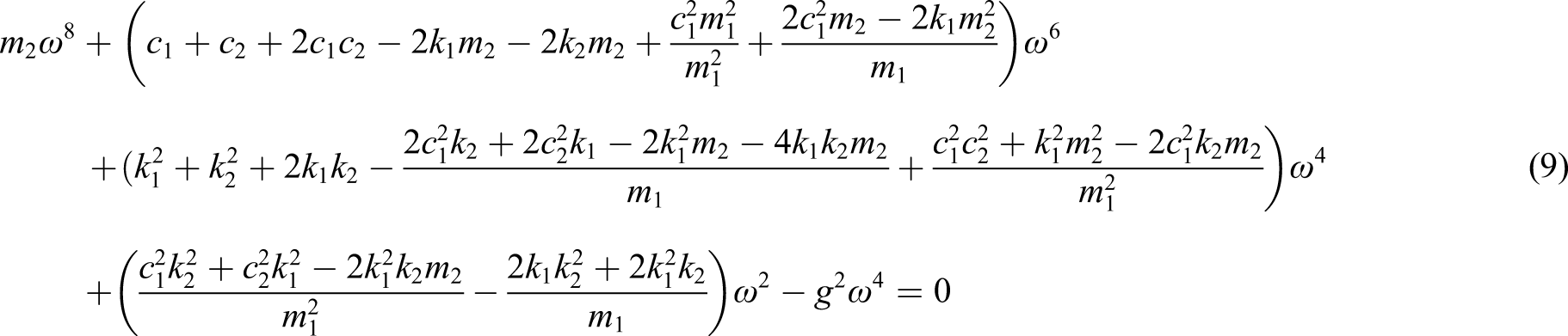
According to the above equation, when the crossing frequency ω0 is known, the time-delay feedback gain coefficient g when the system is critically stable can be obtained. g is a square term in equation (9). So that two mutually opposite critical stability gain g can be obtained. The characteristic equation (4) is used to find the derivative relationship between the real part of the eigenvalue, and exploring the influence of the delay gain g on the root trajectory of the system characteristic equation.
When the τ and the crossing frequency ω0 are both positive, there is

When the feedback gain g > 0, it can be known from equation (10) that the real part of the system characteristic equation root increases as the gain g increases, and the eigenvalue moves to the right until it crosses the imaginary axis, and the system becomes unstable. When the feedback gain g < 0, the real part of the system characteristic equation root increases as the decrease of the gain g. The characteristic root moves to the right until it crosses the imaginary axis, and the system changes from the steady-state to the unstable state. Therefore, the stability condition of the gain is


By substituting the critical stable time-delay gains gmin and gmax into equation (7), the corresponding critical stability delays τmin and τmax can be obtained. Then the stability interval of the delay can be expressed as

The stability interval of time-delay control parameters is the stable state interval of the vibration system with 1/4 vehicle model. For the time-delay dynamic system, its stability also has certain robustness. In the time-delay stability interval, when the parameters of the system change in a given interval, respectively, the corresponding time-delay feedback control parameters are arbitrarily combined, and the system is always stable. In the process of 4.4 optimizations, when the optimal combination of time-delay control parameters is selected, the time-domain vibration response of the vehicle body can be effectively reduced, then the set of time-delay control parameters can make the 2 DOF vibration system stable.
Optimization calculation method of control parameters
Precise integration solution for two-degree-of-freedom vibration system
The unique concept and ingenious algorithm of the fine integration method make the calculation results very accurate. 28 The method has excellent characteristics such as compatibility, convergence, stability, zero amplitude attenuation rate, zero period extension rate, and no overtaking. On the basis of precise integration, Ren C 29,30 proposed an improved algorithm for structural dynamics precise integration, which has the characteristics of high accuracy and avoiding inversion of inhomogeneous terms. To improve the control accuracy and the speed of the algorithm, this paper uses the precise integration method of the delay differential equation to solve the numerical solution of the 2 DOF vibration system and determine the dynamic response of the system under the best time-delay control parameters.
Let equation (1)

Write equation (1) as a state equation form

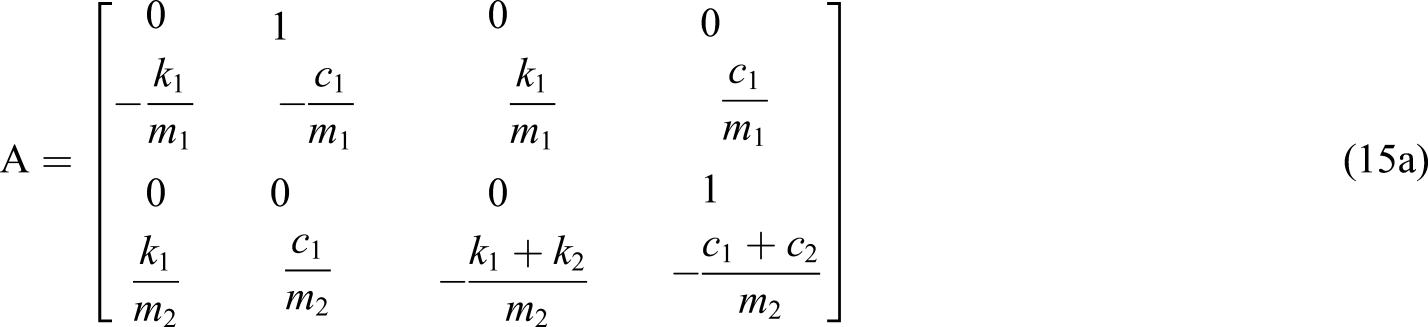




The second term delay feedback term and the third term external excitation term in equation (15) are regarded as nonhomogeneous terms, then the solution of the equation can be written as

The equation (16) is numerically discretized, and the time step is Δt=t
k+1
-t
k
. If the simulation time is T, the total number of steps is n=T/Δt, and the time of a series of equal steps Δt is

Then the solution of the equation can be discretized into the following stepwise integral formula

Write the above equation further as
The initial condition of the equation is

By solving the equation, the system vibration response of each time t
k
can be obtained as
Transform equation (2) as

The result of the function (equation(21))
Objective function
In this paper, the evaluation function J is used as the optimizing objective for analysis

According to the vibration damping requirements of the vehicle’s riding comfort, l1, l2, and l3 are introduced as the weight coefficients that expressing the relative importance of each sub-objective function of the evaluation function. Jd is the root mean square of the displacement of the sprung mass, Jv is the root mean square of the velocity, and Ja is the root mean square of the acceleration.

Control parameter stability interval
Through the stability analysis of the system, the stability interval of the time-delay control parameters can be solved, and the form is as follows

The obtained time-delay control parameter stability interval is a sufficient non-essential condition for this 2 DOF vibration system. Selecting the initial time-delay control parameters in the stability interval can ensure the system maintains a stable state. In the solution process, when the selected time-delayed control parameters can effectively reduce the response of the time-domain vibration of the vehicle body, these time-delayed control parameters can make the 2 DOF vibration system keep stable.
Optimization algorithm for time-delay control parameters
Particle Swarm Optimization (PSO) algorithm is a Swarm intelligence Optimization algorithm first proposed by Kennedy and Eberhart 31 in 1995, which simulates the social behavior of birds, fish, and other animals looking for food. Each particle in the particle swarm represents a possible solution to a problem. Through the simple behavior of individual particles and the information exchange within the group, the intelligence of problem solving is realized. Because of its simple operation and fast convergence speed, PSO has been widely used in many fields such as function optimization, image processing, and geodesy.
The algorithm randomly gives a set of the initial control parameters of the time-delay feedback control within the stability interval (25) to ensure the stability of the initial vibration system.
The numerical solution of the system dynamics equation (1) is solved by the transient time integral algorithm. We can obtain the vibration displacement, velocity, and acceleration of the suspension system to each time t k under the initial control parameters. According to the objective function (23), the objective function value J under each pair of control parameters is obtained, and the value J is compared within the group, and the control parameters corresponding to the minimum value J are selected. Then the control parameters would be updated, and equation (1) includes the new control parameters is solved again. The new objective function value J is calculated. By continuously updating the control parameters (τ, g) and comparing the objective function value J, we select the control parameters when the objective function J is smaller than the optimal control parameter.
The specific process of the algorithm is as follows: In the first round of calculation, we selected n pairs of time-delay control parameters (τn, gn) randomly in the stable interval (25), which is recorded as

We can calculate the numerical solution of the system dynamics equation (1) under the action of each pair of time-delay control parameters (τn, gn) through the transient time integral method. According to the objective function (23), we can calculate objective function value J, then store it with an array.

After obtaining the partial optimal time-delay control parameters in the first group, we update the time-delay control parameters through the following function


Then, we can get the m-th set of objective functions

We select the partial optimal time-delay control parameters (τp m , gp m ) when the objective function Jp m is minimum in the m-th group.
The minimum evaluation index Jp m in the m-th group is compared with the global minimum evaluation index Jg. If the minimum evaluation index Jp m is smaller than the global minimum evaluation index Jg (Jp m < Jg), the global optimal control parameters are equal to the partial optimal control parameter (τg = τp m , gg = gp m ). If the minimum evaluation index in the group is not less than the global minimum evaluation index (Jp m ≥ Jg), the global optimal control parameters are unchanged (τg = τg, gg = gg).
The control parameters are updated again, and then the next round of calculations is performed.
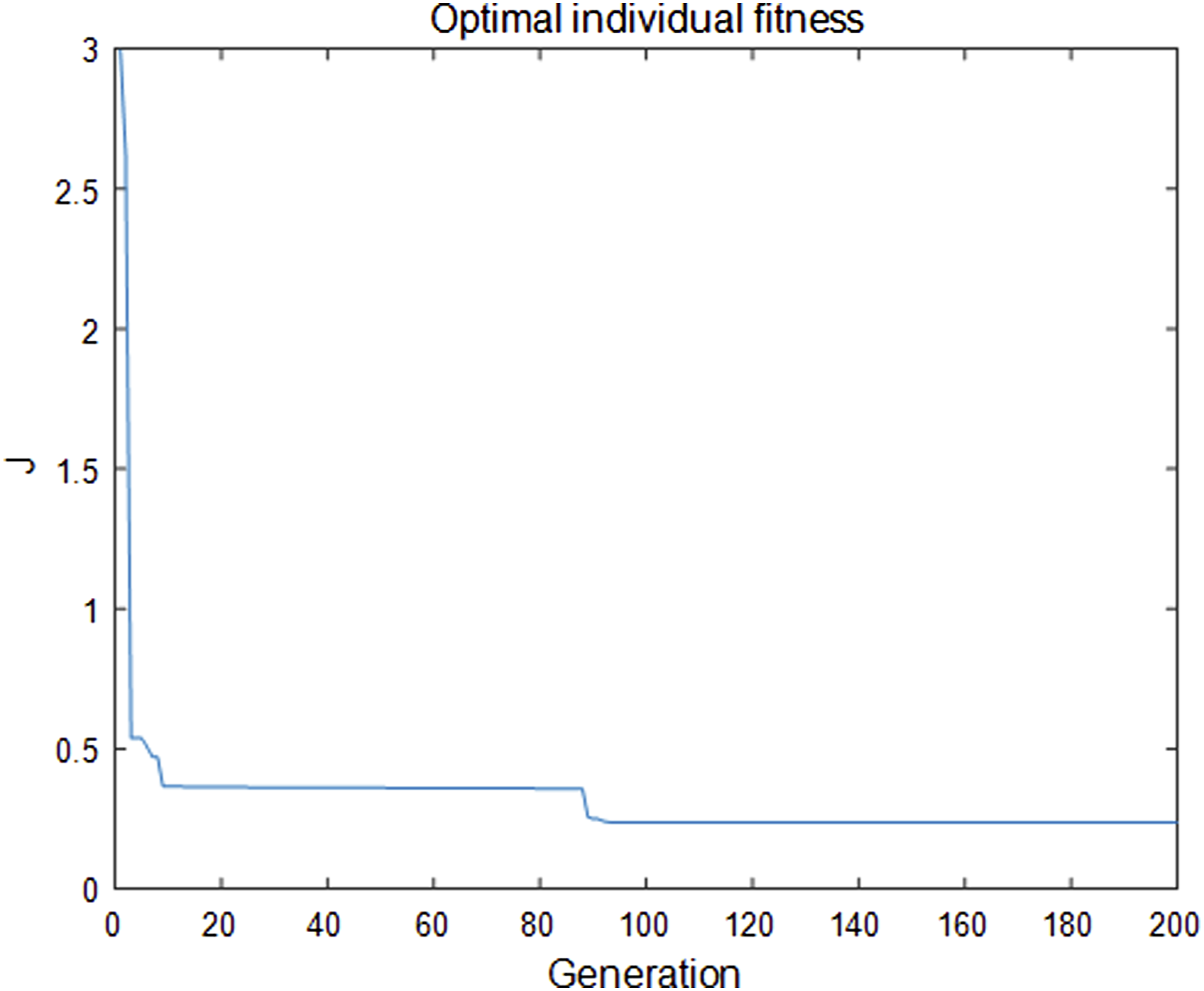
Repeat the above steps to calculate group M. The global optimal control parameters τg and gg at the end of the calculation are the time-delay control parameters. After 200 iterations, changes in the number of iterations of fitness function under harmonic excitation and random excitation were obtained (as shown in Figure 3 and Figure 4). Iterative optimization diagram of fitness function under harmonic excitation. Iterative optimization diagram of fitness function under random excitation.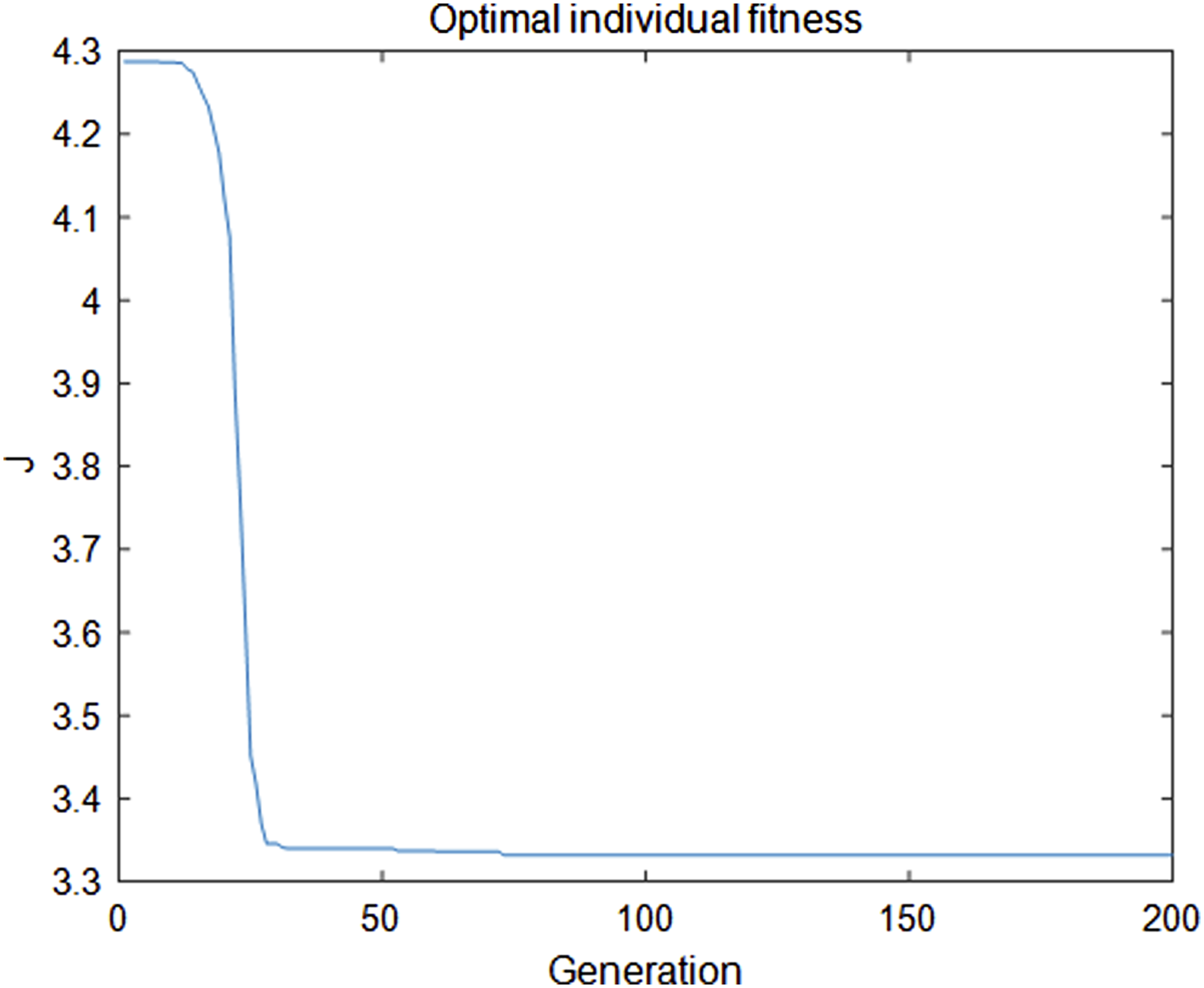
Numerical analysis
In the simulation and analysis, the vibration reduction effects of the delay feedback control parameters obtained by this method and the delay feedback control parameters obtained by taking the frequency response function as the objective function and the passive control are compared and analyzed.
Vehicle model parameters.

For the given system, the stability interval of the control parameters can be obtained
Simulation analysis under harmonic excitation
When the external excitation is harmonic Vertical vibration displacement of the vehicle body. Vertical vibration velocity of the vehicle body. Vertical vibration acceleration of the vehicle body.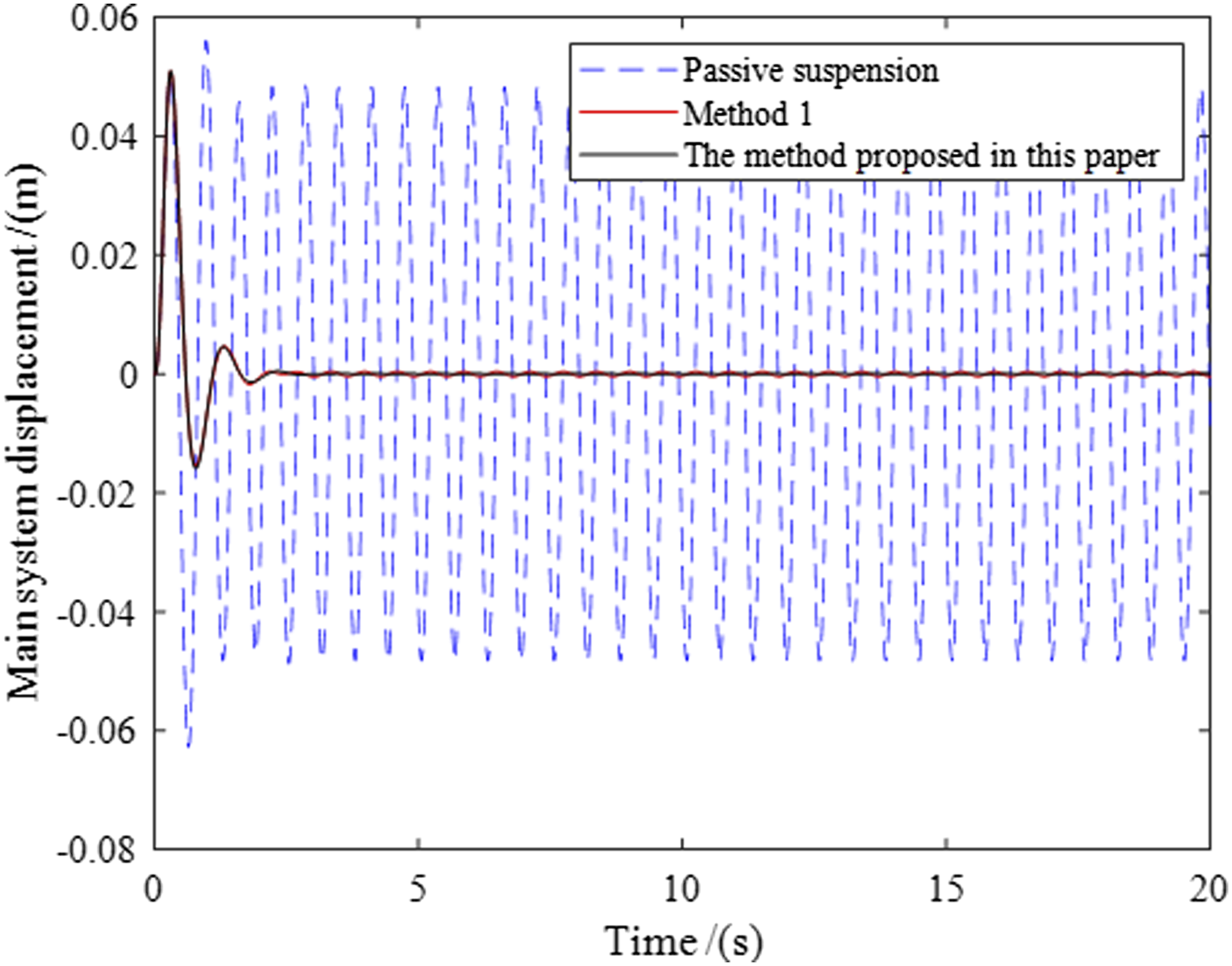
By analyzing the time-domain vibration responses of the vehicle body under the action of three feedback control methods, the time-delay feedback parameters obtained by the proposed method can obtain a very good vibration reduction control effect under the action of harmonic excitation compared with the passive control and method 1. Time-delay feedback control can completely reduce the vibration of the vehicle body. As can be seen from Figures 5–7, after 2 s, the decay ratio of root mean square values of displacement, velocity, and acceleration of the vehicle body is all over 99%. This proves the effectiveness of the method for optimizing time-delay control parameters. In the study, it is found that the time-delay feedback control can still achieve a better vibration reduction control effect when the hysteresis feedback control parameters have a certain deviation. This indicates that the time-delay feedback control parameters can achieve an effective vibration reduction effect in a certain range, which has certain control robustness.
Simulation analysis under random excitation
According to the result analysis in Figures 5–7, for harmonic excitation, both the method proposed in this paper and Method 1 can achieve a good vibration reduction effect of the vehicle body vibration. To further explore the vibration reduction performance of the proposed method for time-delayed feedback control, the external excitation of the motion differential equation (1) is changed from harmonic excitation to random excitation. It explores the effect of the method proposed in this paper on random excitation.
Take the parameters of an automobile suspension system as an example (as shown in Table 1), select random excitation as the vertical disturbance to the wheel axle. Here, a sine function superposition method is used to establish a time-domain model of random excitation (as shown in Figure 8).
32
Complex excitation displacement curve.
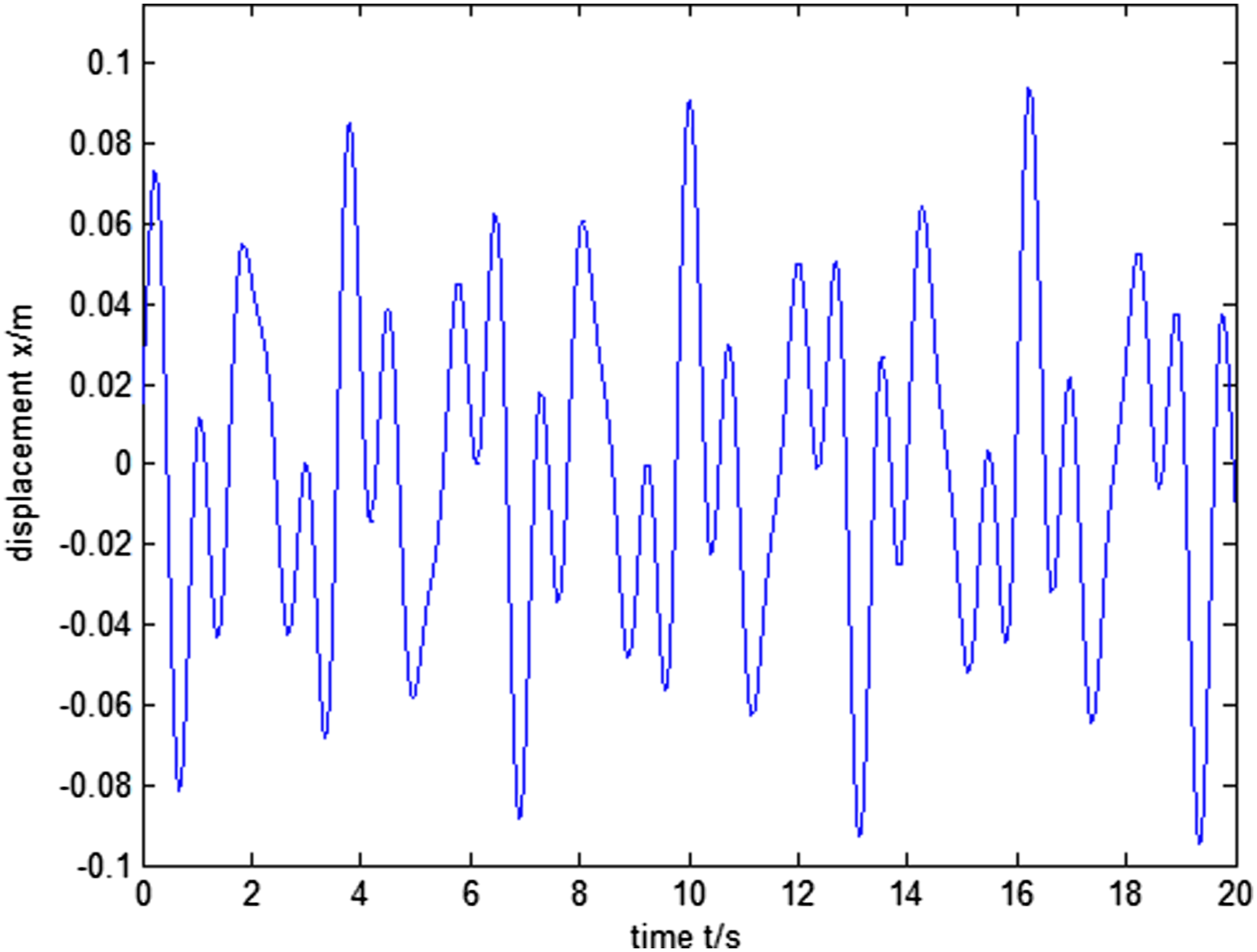
Under the above random excitation, the method of solving the random excitation time-delay control parameters in this paper is used. The time-delay τ of the time-delay feedback control parameters are 1.0314 s and the time-delay feedback gain gram is −19,132 N/m. Method 1 is also selected to solve the time-delay control parameters. The optimized time-delay feedback control parameters have a time-delay τ of 1.7321 s and a time-delay feedback gain gram of 18,765 N/m.
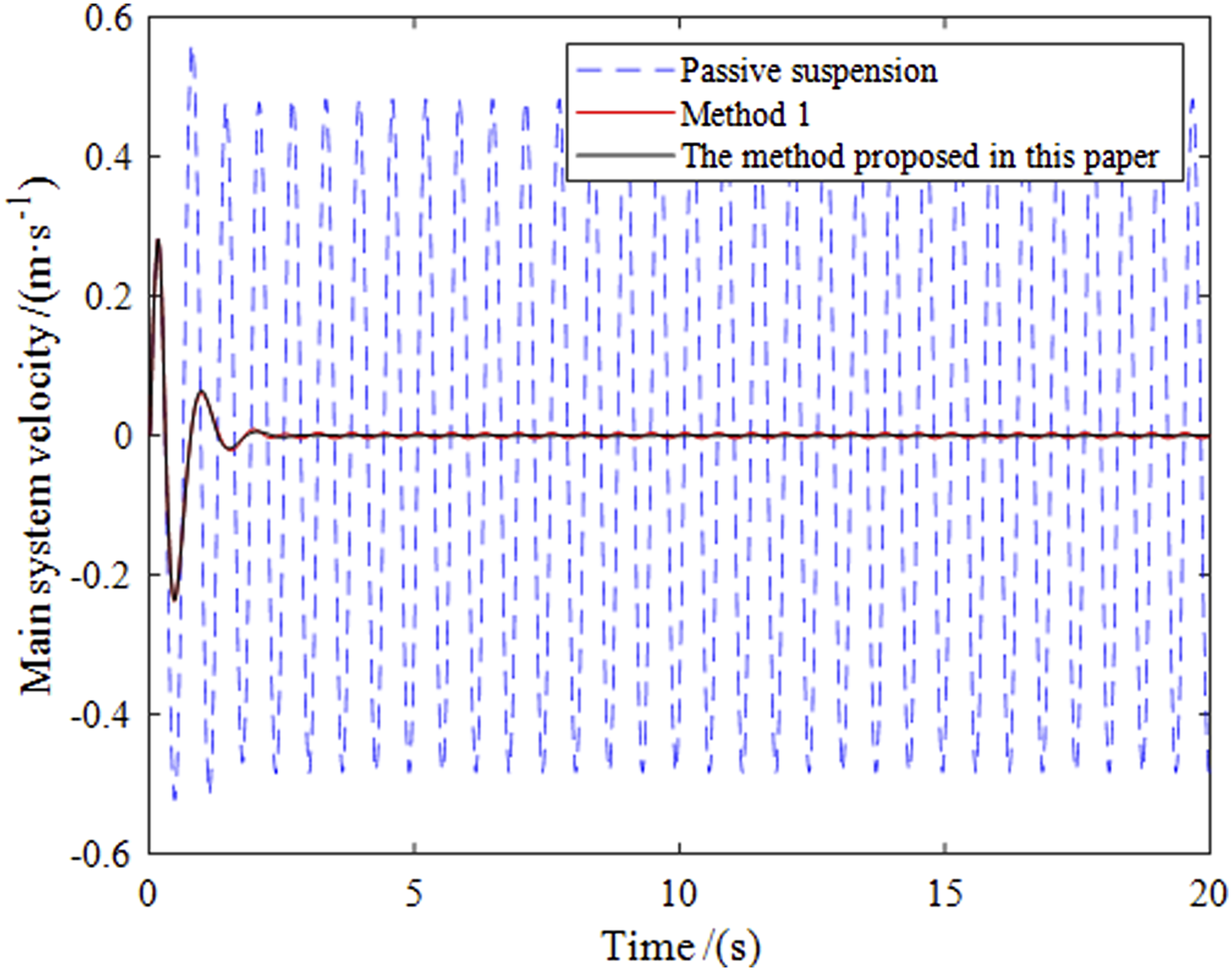
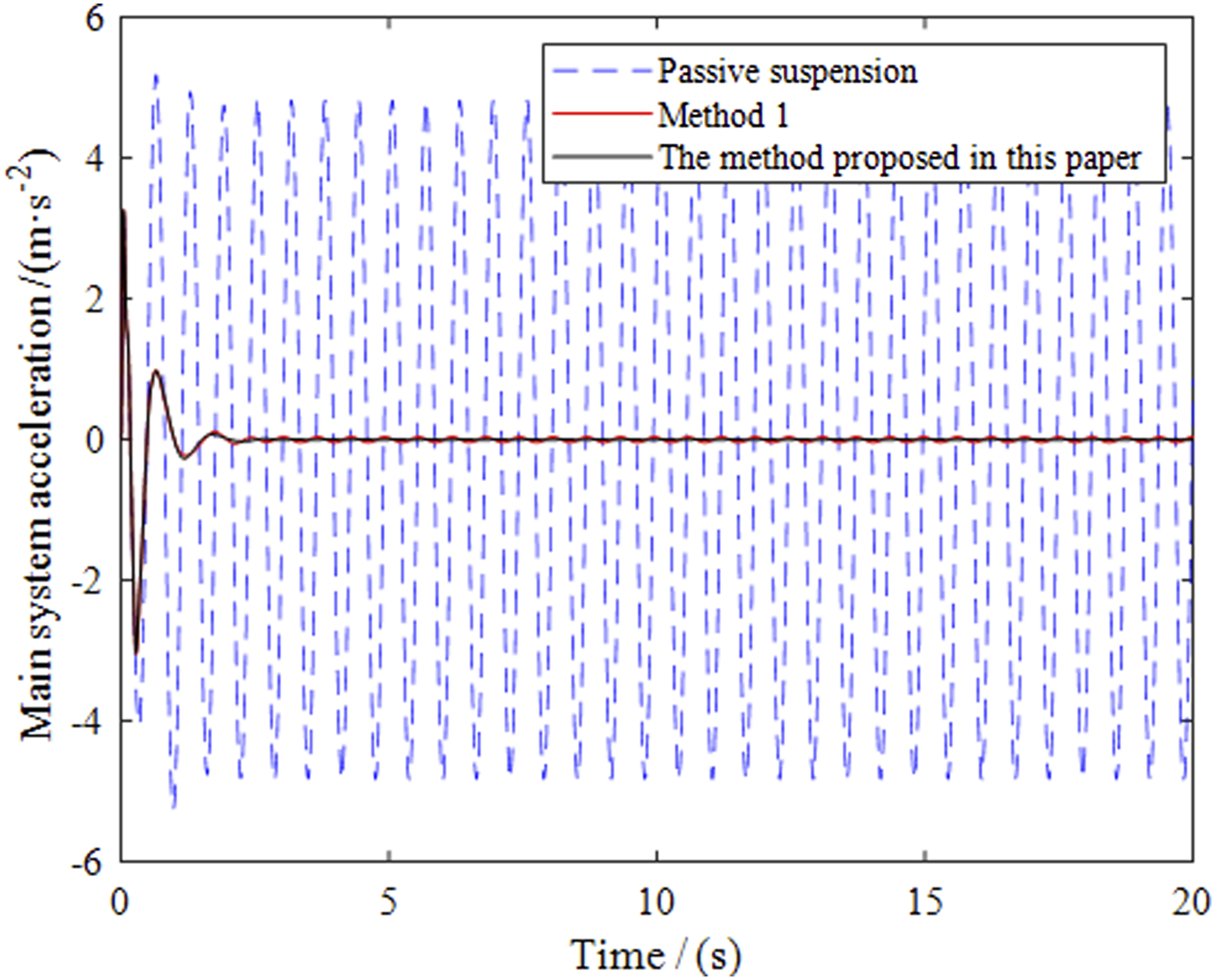
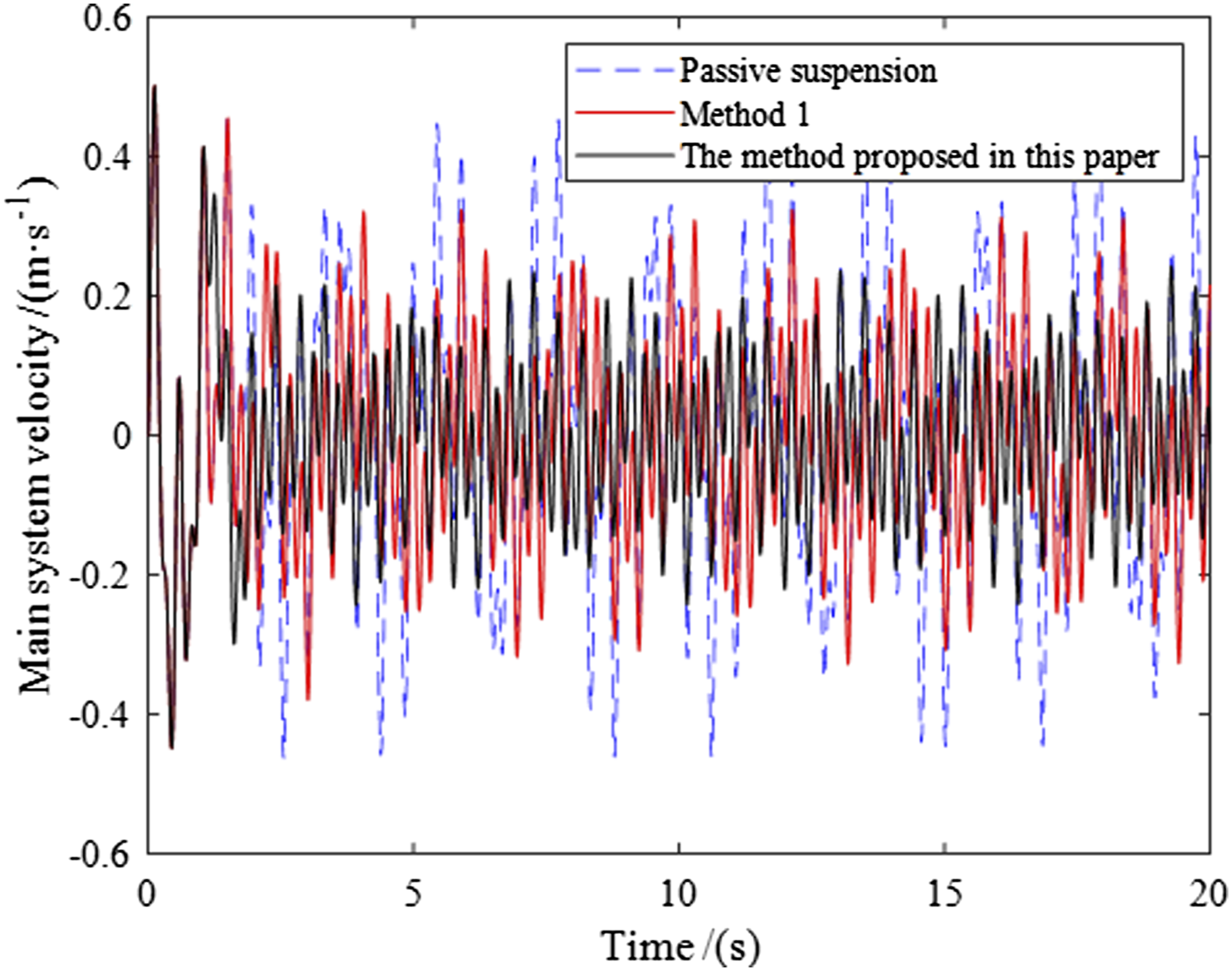
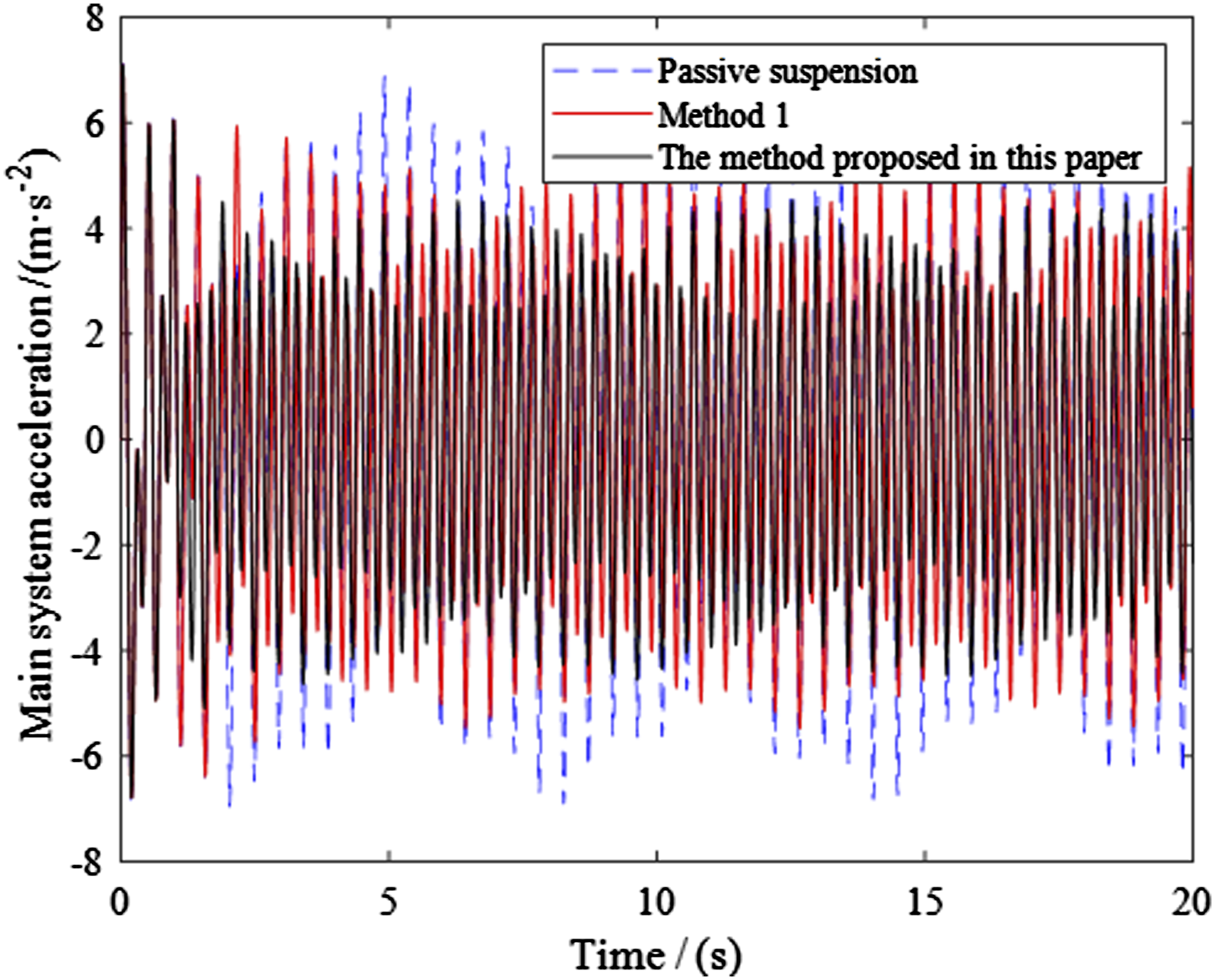
By comparing the control strategy and Method 1 proposed in this paper with the time-domain vibration responses of displacement, velocity, and acceleration of the vehicle body under the action of passive control, the simulation results are shown in Figures 9–11. Vertical vibration displacement of the vehicle body. Vertical vibration velocity of the vehicle body. Vertical vibration acceleration of the vehicle body.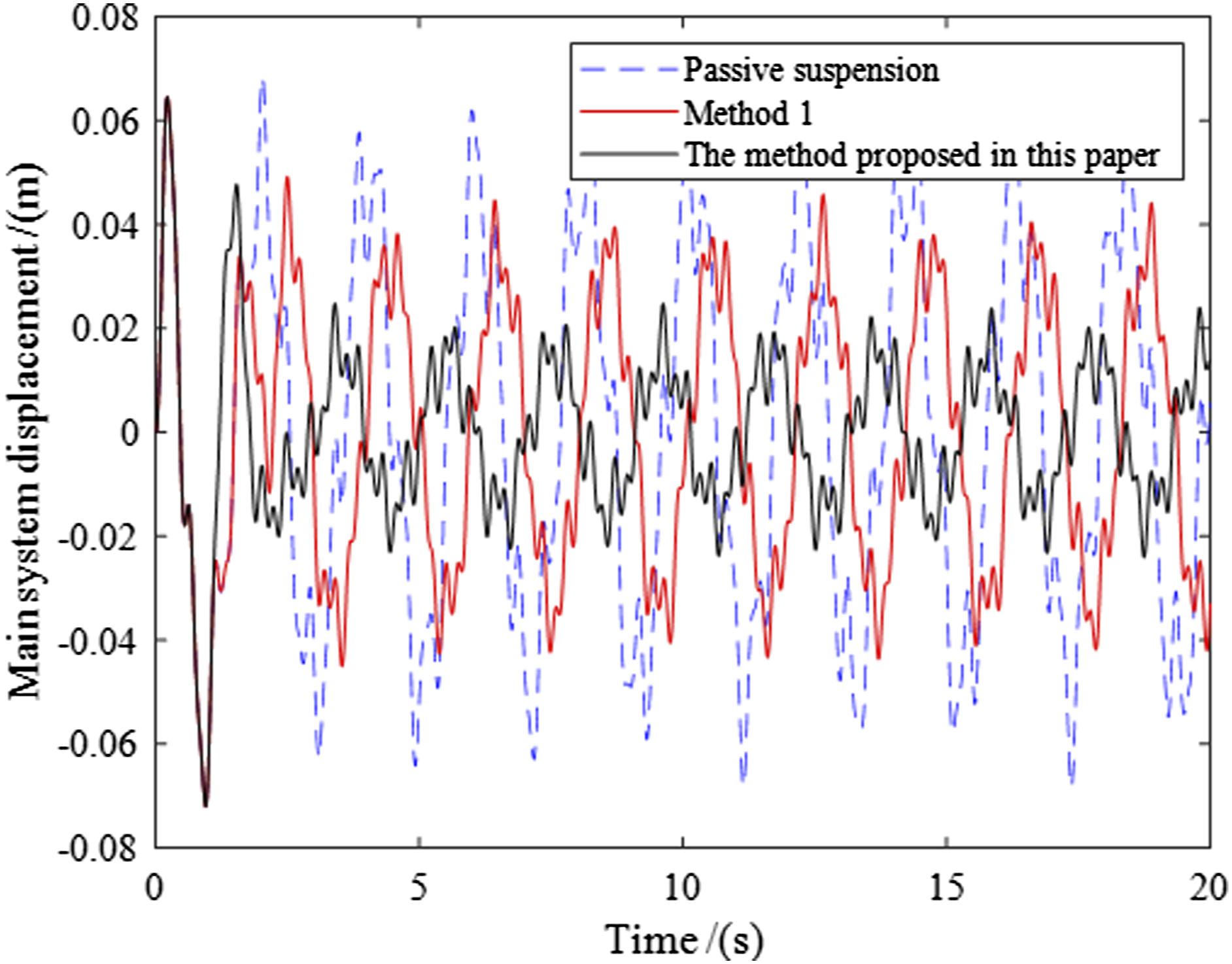
RMS value of evaluation index of the vehicle body.
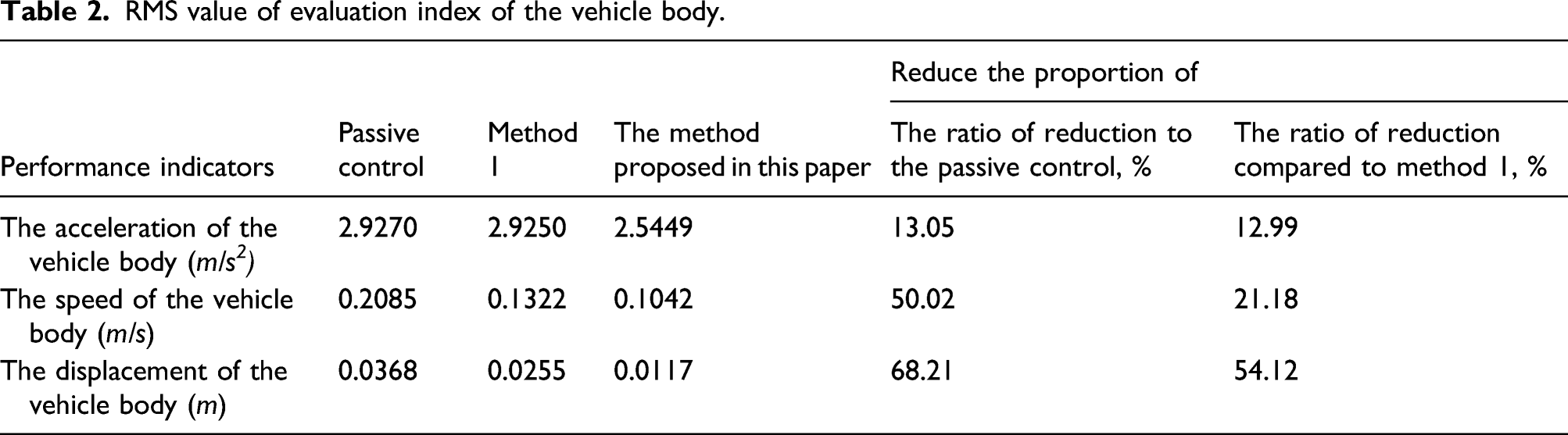
It can be obtained by time-domain simulation image analysis. For the time-domain vibration response of the vehicle body, the time-delay feedback control force calculated by Method 1 has a very good damping effect for the harmonic excitation. But the effect of random excitation is not obvious. The method of objective function establishment proposed in this paper can achieve a similar vibration reduction effect to method 1 for harmonic excitation. Compared with the passive control and method 1, the time-delay feedback control force calculated by the proposed method can achieve a better vibration reduction effect under a random excitation state. The vertical vibration displacement, velocity, and acceleration of the vehicle body are obviously reduced.
Conclusion
In this paper, an optimization algorithm of time-delay feedback control parameters under random excitation is presented. It introduces external excitation into the solution of delay feedback control parameters. The precise integral method is used to solve the delay dynamic differential equations of the system. The time-domain vibration response, time-delay feedback control parameters, and external excitation force of the vibration system are quantitatively related. Particle Swarm Optimization (PSO) algorithm is used to calculate the delay feedback control parameters. Finally, a 2 DOF mathematical model of the 1/4 vehicle suspension model is established. The vibration response with different time-delay feedback control parameters is studied numerically. The actual parameters are analyzed, solved, and verified by the precise integration method to obtain the following conclusions. (1) The precise integral method has the advantages of high precision and good controllability in solving delay differential equations. The external excitation is directly introduced into the time-delay feedback control parameter optimization calculation process. The time-domain vibration response (displacement, velocity, and acceleration) of the vehicle body is employed as the objective function. The time-delay feedback control parameters can effectively reduce the vibration response of the vehicle body under harmonic excitation and complex excitation. It solves the problem that the frequency response function is used as the optimization method to reduce the vibration of complex excitation. (2) When the time-delay feedback control parameters fluctuate in a small range near the optimal value, the time-delay feedback control also has the effect of damping vibration and certain control robustness. At the same time, it provides a new solution for other time-delay feedback control research.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (Grant No. 51275280).