
Abstract
Suspension system is one of the important parts of a vehicle, which is used to buffer the impact of uneven road to the body and passengers, so the suspension system has an important impact on the safety and ride comfort of the vehicle. In order to improve the safety and comfort of passengers and vehicles, in this paper a five-degree-of-freedom half car model is established, and the uncertainty of the model and the time-delay of the control are considered. The dynamic response of vehicle body acceleration root mean square, passenger acceleration root mean square, displacement root mean square and vehicle body pitch acceleration root mean square are selected as optimization objectives. The time-delay control parameters are determined by chaos particle swarm optimization algorithm. The time-delay stability of the suspension control system is analyzed by frequency-domain scanning method to ensure the stability of the time-delay control system. Finally, by establishing the simulation model of the active suspension system with double time-delay feedback control, the response characteristics of the suspension system with double time-delay active feedback control to simple harmonic excitation and random excitation input are analyzed. The results show that under the premise of ensuring the system stability, the active suspension system with double time-delay feedback control has good and obvious controlling and damping effect on the body and seats.
Keywords
Introduction
The impact of vehicle vibration on the health of passengers 1 and vehicle parts and components has been widely concerned. 2 The severe vibration caused by the uneven road surface of the vehicle has caused passengers to be exposed to high-intensity vibration for a long time. This severe vibration seriously affects driving. The comfort and safety of passengers is important and passengers also have a serious impact on their physical health, so it is important to improve the ride comfort and vibration damping performance of the vehicle body.
At present, more and more modern control principles have been applied to seat and body damping.3–5 Scholars at home and abroad have done a lot of researches on the time-delay problem in the seat and body vibration control system; Zhao et al. 6 have established a quarter car model of semi-active suspension with time-delay, and designed a feedback controller using robust control theory, which can improve the driver’s riding comfort. Farong Kou et al. 7 proposed an improved magnetorheological damping model for the seat suspension system. In his proposal, the multinomial model of the absorber is tested and simulated, and the results show that the damping effect is obvious. Chen et al. 8 have established a simplified three degree-of-freedom vehicle seat suspension model, combined with fuzzy control and PID control, and they also proposed an adaptive fuzzy PID control method, through which the performance evaluation index of the seat has been significantly reduced. Olgac et al.9,10 and others proposed a time-delay dynamic absorber and started a series of basic research, that is to say, a vibration absorber with time-delay displacement feedback is installed in the main vibration system. When the frequency of external excitation is the same as that of the vibration absorber, the vibration damping effect of the main vibration system is the best. For the passengers’ riding comfort and safety, Singh et al.11,12 designed three different controllers, and simulated them in time domain and frequency domain. The results show that the hybrid ANFTS PID method can effectively reduce the vibration; Ammar.A.Aldai et al.13 proposed an intelligent control scheme based on fuzzy logic and artificial bee colony, which carried out control research on seat vibration reduction and achieved ideal results. 13 Although great achievements have been made in the study of seat and body damping control, the one quarter vehicle model of active suspension with single time-delay feedback control is simple and easy to analyze, but the dynamic response obtained is not comprehensive. At the same time, the stability of time-delay system is not judged by the above study, especially on the stability of double time-delay system.
In view of the above problems, this paper applies the active suspension control theory with double time-delay feedback control theory to the five degrees of freedom half car model, and proposes the active suspension control method with double time-delay feedback control under the premise of stability. It also establishes the objective function through the Innovation method of establishing the objective function, that is to say, calculating the root mean square value weighting of the dynamic response of the excitation force at each time point, and establishes the objective function through the chaotic particles. The group algorithm has been used to calculate the increased efficiency and delayed time, and the frequency domain scanning method is proposed to analyze the stability of the control parameters. Finally, through the simulation of passive suspension and active suspension with double time-delay feedback control, the influence of active suspension with double time-delay feedback control on improving ride comfort and driving safety under the premise of stability is analyzed.
Establishment of a half-vehicle active suspension system model
Establishment of suspension system
According to the characteristics of vehicle suspension, the physical model of vehicle suspension system is simplified from the perspective of research. When the vehicle is symmetrical to its longitudinal axis, only the vertical vibration and pitching vibration of the vehicle body have the greatest impact on the riding comfort. The vehicle body is simplified as a two-axis five-DOF physical model, which has all the basic characteristics of the studied problem. The components of the structure include the mass of the passenger seat, the mass of the vehicle body and the mass of the wheel.
As shown in Figure 1, the parameters of the active suspension of the five-DOF half car vehicle model with double time-delay feedback control are: the mass of a half car body
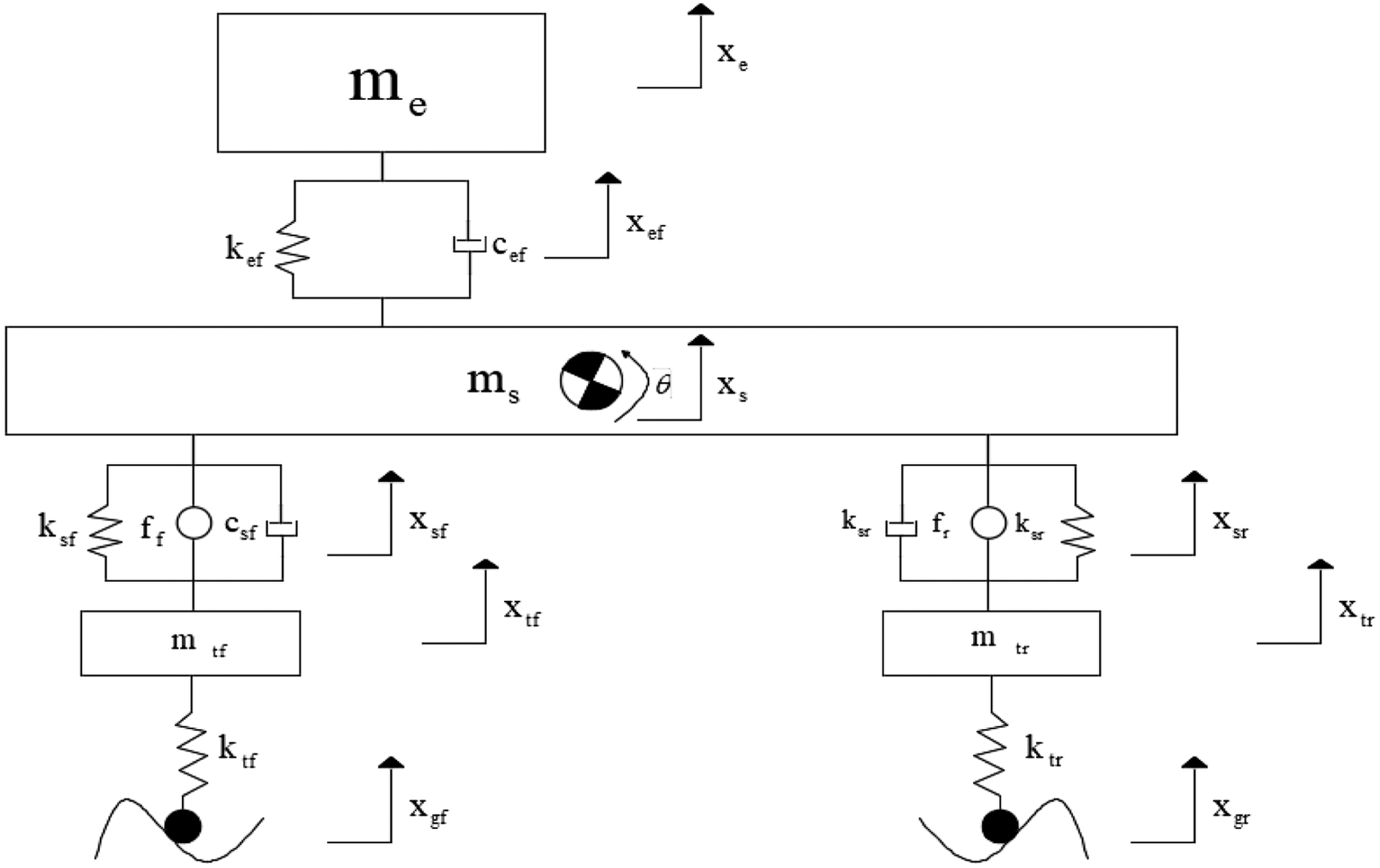
Model of an active suspension semi-vehicle with double time-delay control.
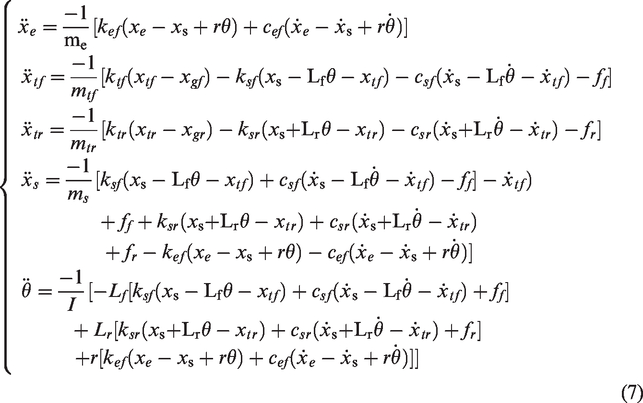
According to the Lagrange method, the dynamic differential equation of the semi-autonomous vehicle model of active suspension with double time-delay feedback control is
Equation of seat vertical motion

Vertical motion equation of body mass center

Body pitch motion equation

Equation of wheel vertical motion

The time-delay feedback control force based on the front and rear wheel displacement is expressed as

As shown in Figure 1, when the vehicle body pitch Angle is small

That is, equations of motion (1), (2), (3), (4) and (6) can be expressed as
Suspension control system design
In this section, according to the vehicle’s suspension performance index and passenger comfort performance index, the state variables are selected to define the following state space equations

Optimal control analysis of suspension system
Establishing the optimization objective function
According to the vehicle suspension performance index and passenger comfort index, body acceleration, body pitch acceleration, passenger acceleration, and passenger displacement are important index for measuring vehicle ride comfort and riding comfort. According to the above evaluation index, an innovative method of establishment objective function method, solving equations (1) to (4), obtains the dynamic response of the system at each time point
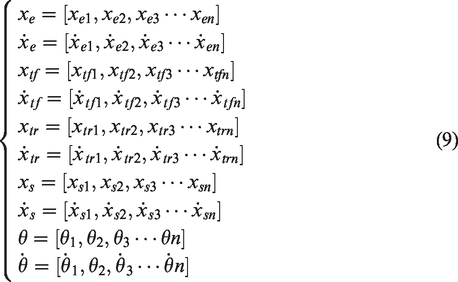
The dynamic response values at each time point are substituted into equation (7) to obtain
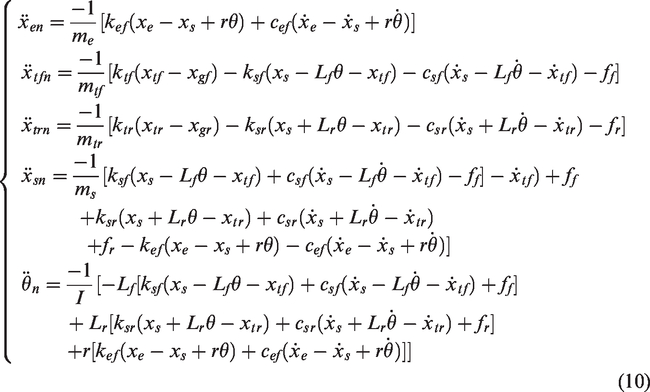
The response of passenger seat, body acceleration, pitch acceleration and tire acceleration at each time point is obtained, so that the optimization results at each time point can be obtained during the optimization process, that is, the objective function is minimized to the greatest extent.
In this paper, the root-mean-square value of vehicle body acceleration, root-mean-square value of passenger acceleration and displacement, and root-mean-square value of vehicle body pitching acceleration are selected as optimization objective functions to maximize passenger comfort and vehicle smoothness.

Weighting factors
Determination of time-delay parameters based on chaotic particle swarm
The group calculation of the chaos particle swarm 14 is a combination of chaos optimization 15 and particle swarm optimization. 16 First of all, this algorithm uses the characteristics of chaos such as randomness, ergodicity and regularity to search the optimal particles in the current particle swarm. Then it replaces one particle in the particle swarm randomly. Thus, the evolution speed of particle swarm can be accelerated to improve the local minimum ability of particle swarm optimization algorithm, improve the convergence speed and accuracy of the algorithm, and have strong robustness to the system. According to the target function of vehicle suspension performance index and passenger comfort index, and combined with the characteristics of chaos particle swarm optimization algorithm, the problem of determining delay control parameters is transformed into an optimization problem, so as to minimize the target function.
Algorithm principle
For a given optimization function, the chaotic particle swarm algorithm can make the search process have the ability to avoid falling into a local minimum by corresponding to the traversal process of the chaotic orbit.
The chaotic particle swarm algorithm involves a chaotic local search algorithm. The steps are as follows: Let Calculate the chaotic variables of the lower iteration Convert chaotic variable Evaluate the new solution according to the decision variable
Chaotic particle swarm algorithm steps
Randomly initialize the position and velocity of each particle in the population.
Evaluate the fitness of each particle, store the current position’s adaptive value of each particle in the Pbest of each particle, and store the position and fitness of the individual with the best adaptive value in all Pbest in gbest;
Update the speed and position of each particle;
Calculate the objective function value of each particle, and then retain the 20% of the particles with the best fitness function value in the population;
Perform chaotic local search on the best particles in the group, and update their Pbest and gbest of the group;
If the stop condition is met (usually the preset calculation accuracy or number of iterations), the search stops and the result is output, otherwise go to 7;
7. Shrink the search area as follows 8. The remaining 80% of particles in the population are randomly generated in the contracted space, turn 2.

In the process of optimization, in order to search for the optimal particle faster, a reasonable range is set according to the established objective function in the optimization process. By writing the algorithm program of chaotic particle swarm optimization in matlab software, 50 particles were selected for iterative optimization, the number of particle swarm iteration was 150 times, the maximum step number of chaotic iteration was 10, the learning factor was 2, the inertia weight was 0.8, and the optimal control parameters under simple harmonic excitation and random excitation were obtained, respectively

The change graph of iteration optimization of fitness function is shown in Figure 2.
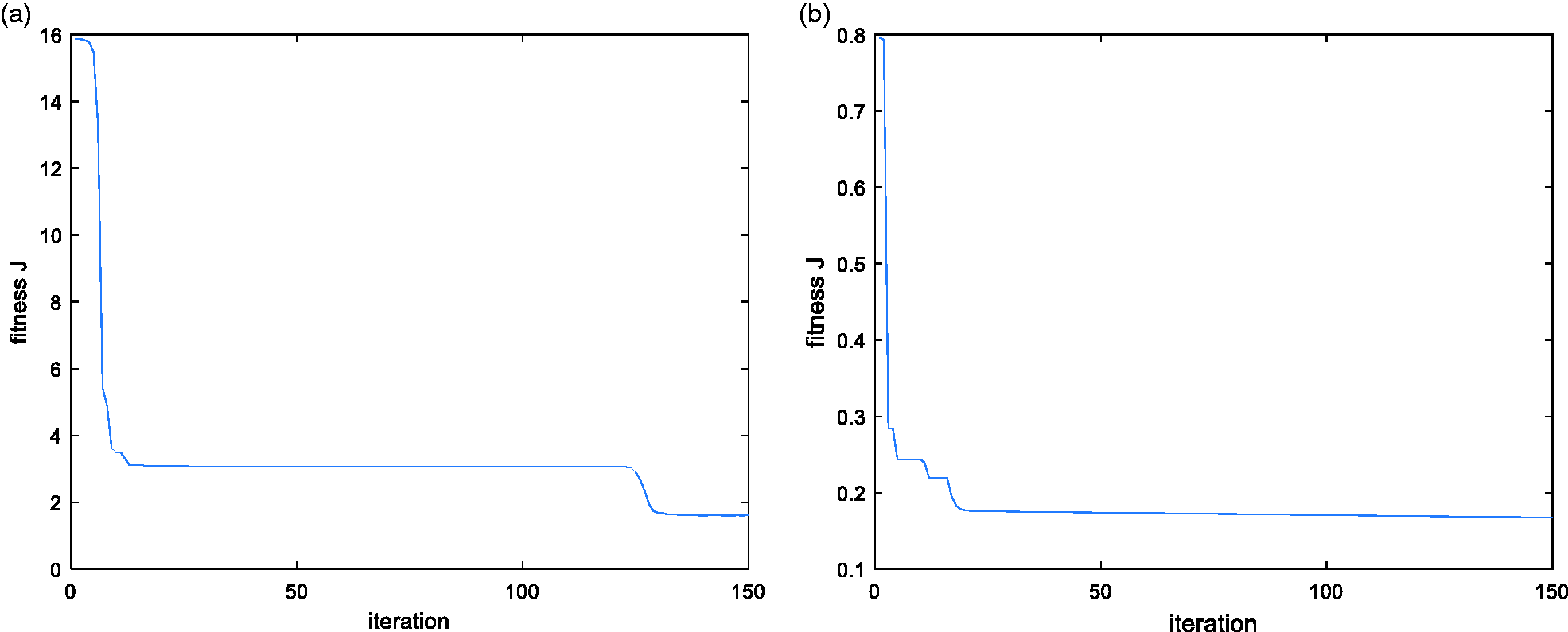
(a) Variation of fitness function under harmonic excitation, (b) variation of fitness function under random excitation.
Stability analysis
The existence of time-delay will not only reduce the transmission speed of the system, 17 but also lead to instability or oscillation of the system. Therefore, in order to ensure the stability of the feedback control system with double delays, an innovation method of frequency-domain scanning method is used to analyze the stability of the system.
First, equation (7) is rewritten as a general form of time-delay system

The characteristic equation of the system obtained by equation (13) is

The specific form is


Furthermore, given a0,a1,a2 the existence of continuous polynomia l


Because s and z are complex numbers, it is not necessary to find the polynomial
Determine the amount of time-delay. Bring
When the delay is zero, the characteristic root of the equation is in the left half plane of the complex plane, that is, the feedback control system with double delay is stable at
Figure 3 is obtained by the performing frequency domain scanning. It can be seen from the figure that the system has two cross frequencies
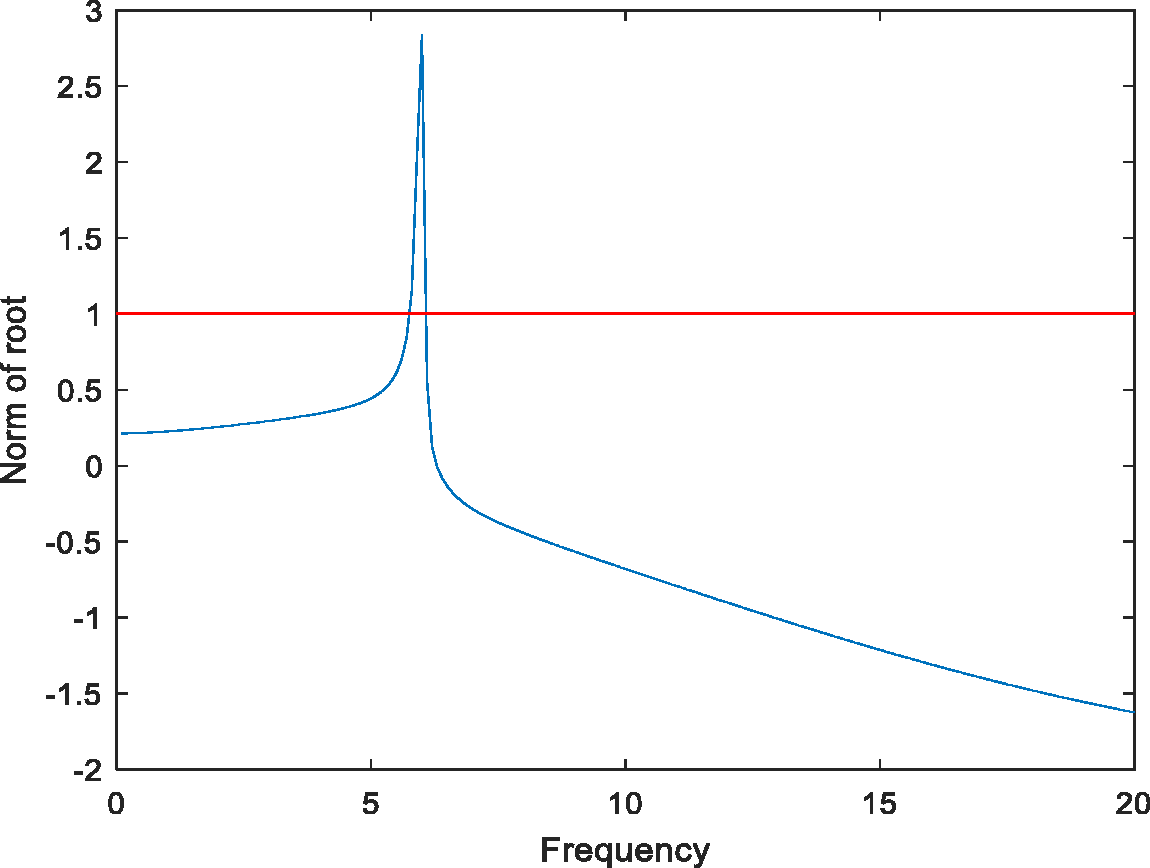
Norm of z1.
Establishment of simulation model and result analysis
Simulation analysis under simple harmonic excitation
Due to the complexity of the five-degree-of-freedom half-car model system studied, the vibration reduction effect was verified through frequency domain analysis, 18 and the optimized time-delay control parameters were brought into the amplitude-frequency characteristic function to obtain the car body, seat and the optimized amplitude-frequency characteristic curve, as shown in Figure 4.
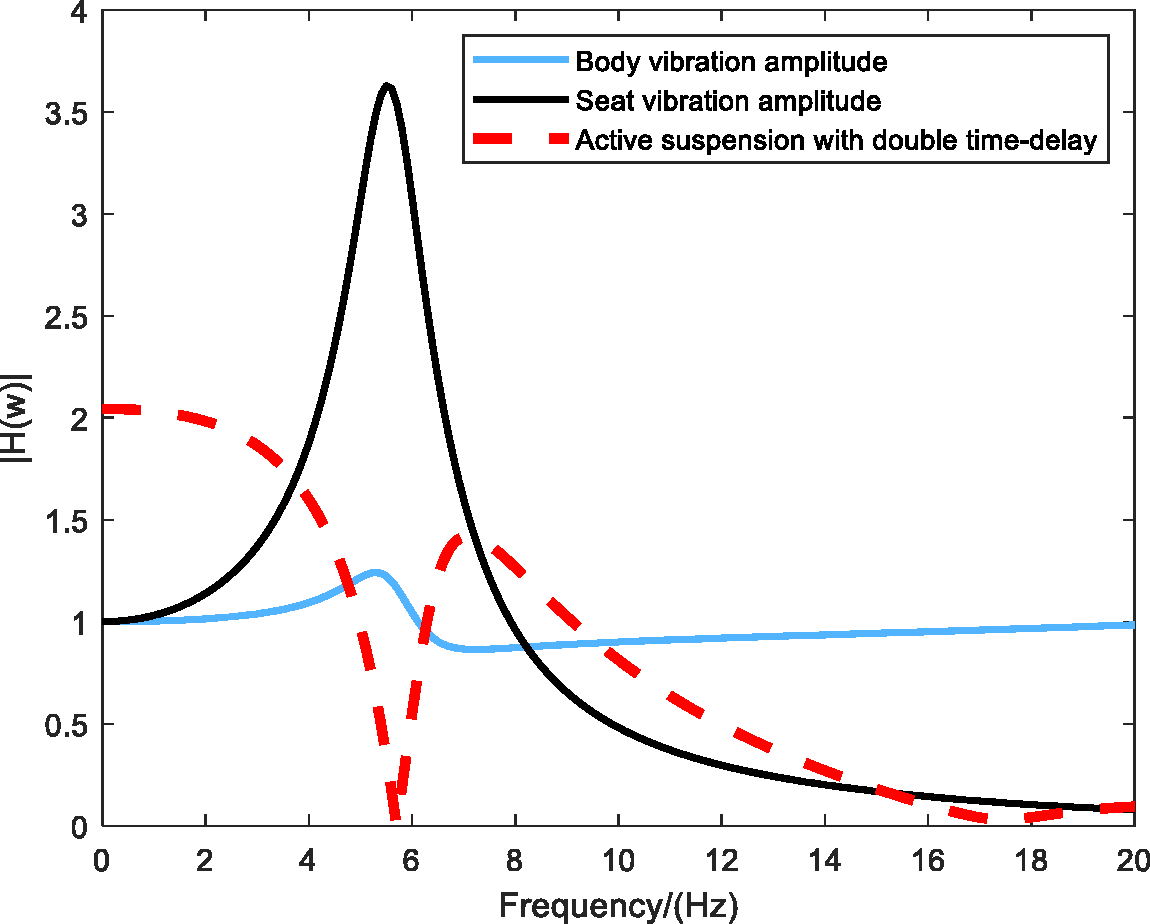
Amplitude–frequency characteristic curve.
Analyzing Figure 4, the maximum amplitude-frequency characteristics of the body and seat are mainly within 4–7 Hz. After the time-delay feedback control is introduced, the amplitude of the body and seat is significantly reduced and drops to 0 at 5.7 Hz. When the frequency is the same as the system frequency, the system vibration will be completely absorbed, indicating that the active suspension with double time-delay feedback control significantly improves the car’s driving stability and ride comfort.
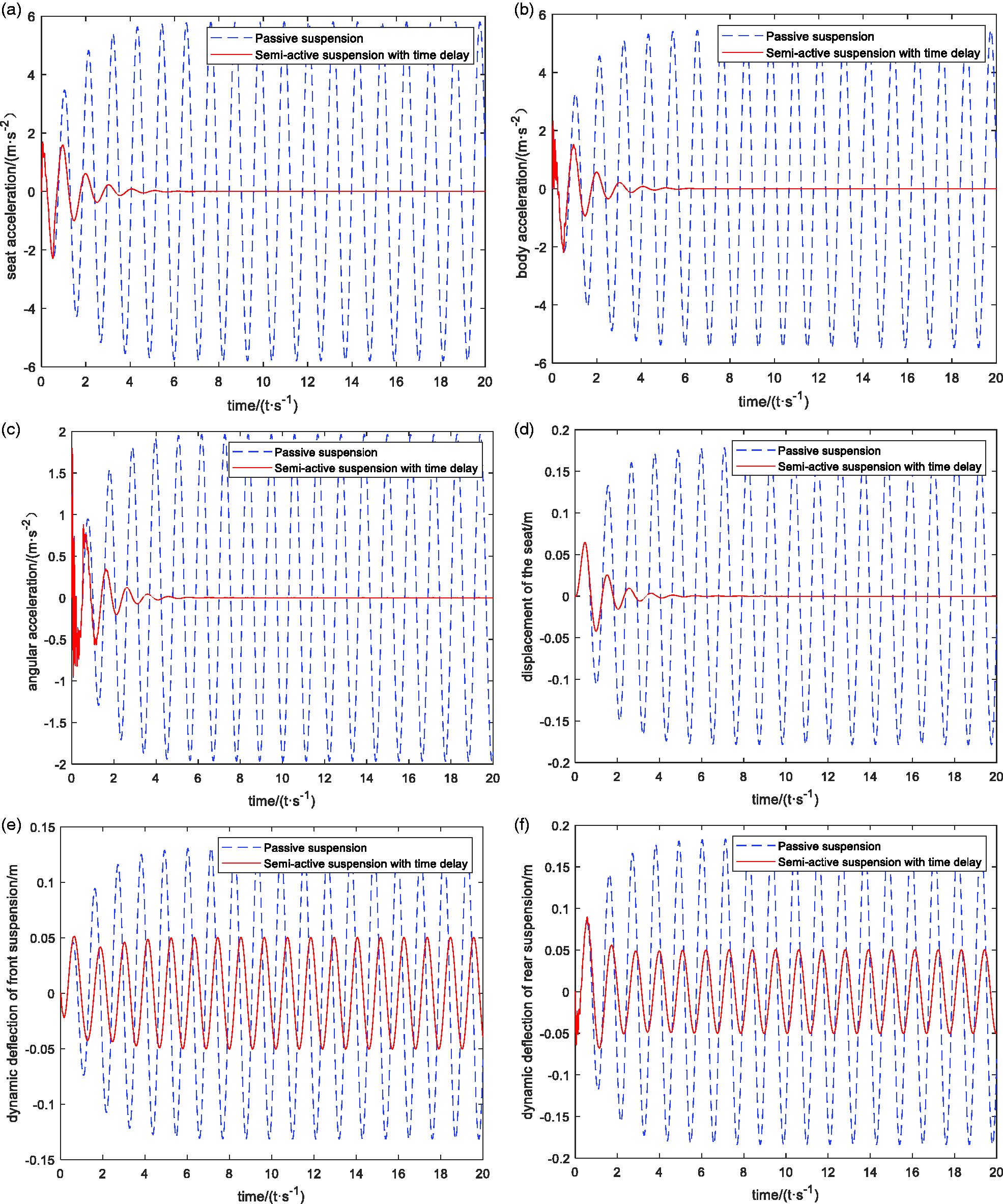
In order to further verify the damping effect of active suspension with double time-delay feedback control, the time-delay parameter optimized by chaos particle swarm is brought into equations (1) to (4), and the simple harmonic excitation
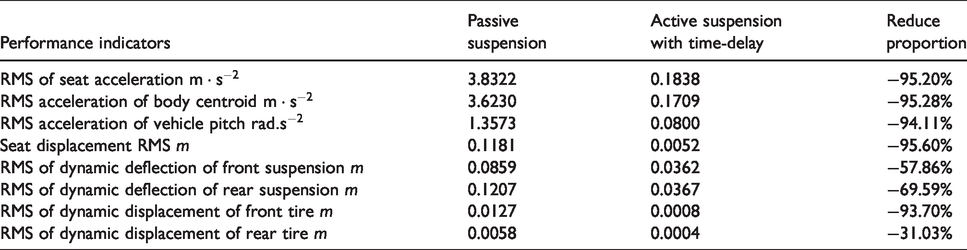
From the time domain simulation results in Figure 5, it is known that for simple harmonic excitation, the active suspension with double time-delay feedback control achieves better damping control effect than the traditional passive suspension. Under the control of the time-delay feedback controller, after the system has stabilized, its body acceleration, seat acceleration, pitch acceleration, suspension deflection, tire dynamic displacement, and seat displacement have all significantly decreased. After 20 s of time domain simulation calculations, the rms values of the performance evaluation indexes are shown in Table 2: compared with the passive suspension, the root-mean-square value of the seat acceleration of the active suspension with double delay feedback control decreased from 3.8322 to 0.1838, a decrease of 95.20%. The root mean square value of the acceleration at the center of mass decreased from 3.6230 to 0.1709, a decrease of 95.28%. The root-mean-square value of vehicle pitching acceleration decreased from 1.3573 to 0.0800, with a decrease rate of 94.11%. Seat displacement root-mean-square value decreased from 0.1181 to 0.0052, reducing the proportion by 95.60%. The root-mean-square value of body displacement decreased from 0.0571 to 0.0089, with a decrease rate of 84.41%. The root-mean square values of dynamic deflection of the front and rear suspension decreased from 0.0859 to 0.0362, respectively, reducing the proportion by 57.86%. 0.1207 reduced to 0.0367, reducing the proportion by 69.59%; the root mean square value of the dynamic displacement of the front and rear tires is reduced from 0.0127 to 0.0008, a reduction of 93.70%; 0.0058 to 0.0004, a reduction of 31.03%; under simple harmonic excitation, after the introduction of double delay feedback control, Can effectively suppress the vibration transmitted to the vehicle body to greatly improve ride comfort and vehicle handling stability.
Simulation comparison of performance indexes under simple harmonic excitation.
Simulation analysis under random excitation
In order to further study the damping effect of the active suspension with double time-delay feedback control, random excitation is selected as the vertical disturbance to the axle.19,20 The parameters of the vehicle suspension system are shown in Table 1. Here, a sine function superposition method is used to establish a time-domain model of random excitation as shown in Figure 6:

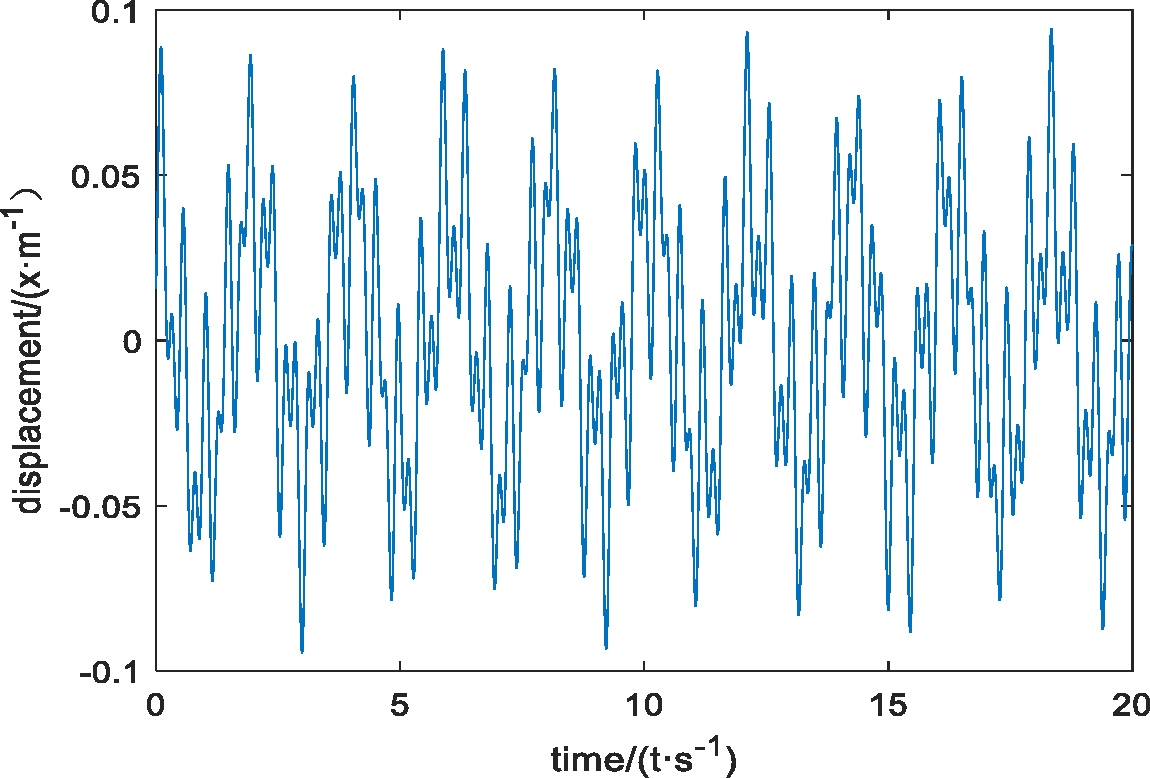
Time-domain model of random excitation.
Vehicle suspension model parameter.

RMS value of vehicle performance index under simple harmonic excitation.
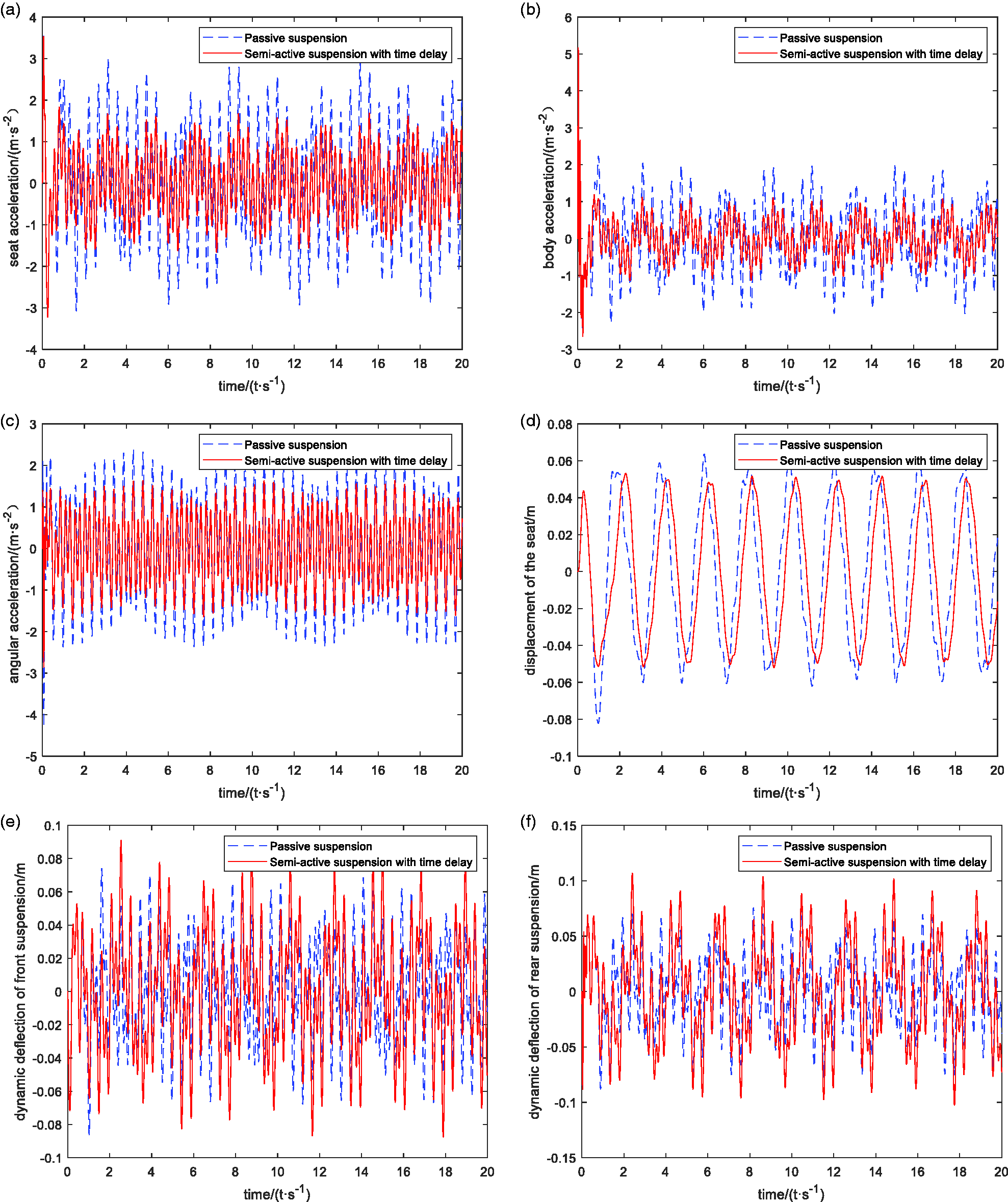
Through simulation observation of seat acceleration, body vibration acceleration, body pitch acceleration and suspension dynamic deflection and tire dynamic displacement, the vibration damping effect of active suspension with double time-delay feedback control on random excitation is verified. The simulation results are as follows.
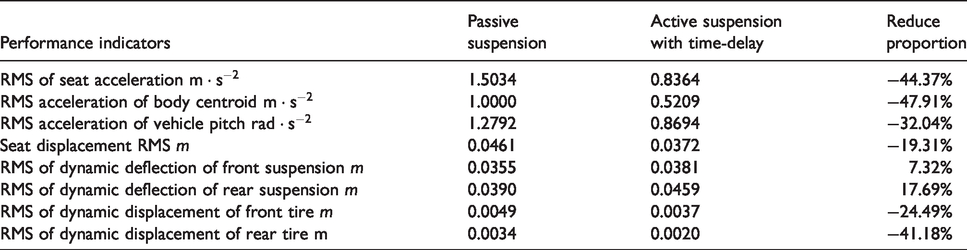
From the time-domain simulation results of Figure 7, from random excitation, it can be concluded that the active suspension with double delay feedback is also more effective in reducing vibration under random excitation. Compared with passive suspension, the rms value of seat acceleration of active suspension with double time-delay feedback control was reduced from 1.5034 to 0.8364 as shown in Table 3, a decrease of 44.37%. In the comparison of the root mean square value of the vertical acceleration of the semi-car body and the pitch acceleration of the body, it was reduced from 1.000 to 0.5209, a reduction ratio of 47.91%; from 1.2792 to 0.8694, a reduction ratio of 32.04%, and the rms value of seat displacement was reduced from 0.0461 to 0.0372, a reduction ratio 19.31%; the dynamic deflection of the front and rear suspensions increased from 0.0355 to 0.0381, an increase of 7.32%; from 0.0390 to 0.0459, an increase of 17.69%. Although the dynamic deflection of the front and rear suspensions has been increased, within the design range, the dynamic displacement of the front and rear tires has obtained relatively good vibration damping effects; their root mean square values have been reduced from 0.0049 to 0.0037, a reduction ratio of 24.49%, and from 0.0034 to 0.0020, a decrease. The small proportion is 41.18%, so that the tire has better braking force and steering performance when driving on the road, so that the driver has better maneuverability. It can be concluded that the active suspension with double time-delay feedback control has the same ideal damping effect on passenger comfort and vehicle ride comfort under random excitation.
Simulation comparison of performance indicators under random excitation.
RMS value of vehicle performance index under random excitation.
Conclusion
In this paper, the dynamic model of the active suspension control system with double time-delay feedback control is established, the objective function is established by selecting the value of the root mean square of dynamic response of suspension performance index and passenger performance index, the optimal control quantity is obtained by chaos particle swarm optimization algorithm, the stability analysis of time-delay control parameters is carried out by frequency-domain scanning method, and the simulation verification is carried out, thus providing theoretical basis to the control system of active suspension with double time-delay feedback control.
The following conclusions are obtained by simulating the damping effect of the double time-delay feedback control on the vehicle body and passengers under the random and harmonic excitation: each evaluation index of passengers and vehicles have been significantly reduced, although the dynamic deflection of the front and rear suspension has been increased under the random excitation, but the increase range is within the design permission, that is to say, the damping effect of the active suspension with the double time-delay feedback control is significant, which can improve the riding comfort and the smoothness of the vehicle.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (Grant No. 51275280).
Appendix 1
Corresponding matrix of state equation of suspension control system: