
Abstract
To reduce seat vibration caused by uneven road surfaces, the time-delay feedback control into the seat suspension system was introduced and an active seat suspension control method based on time-delay feedback was proposed in this paper. A three-degree-of-freedom (3-DOF) suspension model with time-delay feedback control was established. The time-delay independent stability region and critical stability curve of the system were derived using the method of characteristic root and stability switching. The effect of feedback control parameters on system vibration was investigated in the stability region. The seat acceleration (SA), body acceleration (BA), suspension dynamic deflection (SDD), and tire dynamic displacement (TDD) were used as multi-objective optimization functions and the optimal values of feedback control parameters were obtained based on the particle swarm algorithm (PSO) with above optimization functions. The numerical simulation was conducted to validate the proposed model. The simulated results show that the time-delay feedback control can significantly suppress the vibration response of the seat and effectively improve the suspension performance under different road excitation compared with the passive suspension. It can be seen that the active seat suspension with time-delay control significantly improve ride comfort and handling stability of the vehicle, which can be used as a reference for the active control technology of vehicle suspension.
Keywords
Introduction
During the process of driving, the vibration caused by the roughness of the road can make the driver tired and lower driving safety. Therefore, it is important to improve the vehicle’s driving comfort for the physical and mental health of the driver and passengers.1-3 Generally, the suspension system is an essential subsystem of the vehicle, which has a large impact on the ride comfort and handling stability of the vehicle. 4 The conventional passive suspension consists of elastic and damping elements with fixed parameters, which leads to a contradiction between comfort and stability in the vehicle system.5,6 Therefore, numerous types of active vehicle suspensions with excellent performance have been proposed, such as adaptive control,7-9 sliding-mode control,10,11 and H∞ control. 12 Although the performance of the active vehicle suspension is excellent, a high cost is required.
Compared with improving the vibration reduction performance of vehicle suspension, improving the relevant performance of seat suspension has some advantages such as low cost, easy implementation, and short development cycle. The seat suspension is in direct contact with the driver; if the vibration of the vehicle seat can be reduced, it can effectively improve ride comfort.13,14 Moreover, change of the structural parameters of the seat suspension has little impact on the other performance of the vehicle. Thus, the improvement and optimization of the seat suspension is simpler than that of the vehicle suspension. The stiffness and damping of the passive seat suspension cannot be changed once they are determined,15,16 which greatly limits the vibration reduction performance. However, the active seat suspension can have better adaptability to different road conditions. Ning et al. 17 and Choi et al. 18 applied sliding-mode control to a seat suspension and designed a sliding-mode controller with a state observer, which can reduce seat vibration. However, sliding-mode controller (SMC) is a discontinuous switching control strategy that forces system variables to move along a set “sliding-mode” trajectory, which easily leads to “chattering” during the switching process. 19 Gan et al. 20 applied adaptive control to active seat suspension and tested the robustness and stability of the control system through transient switching frequency. Jia et al. 21 applied H∞ control to active seat suspension, which significantly improved the seat’s comfort. Ning et al. 22 designed a disturbance observer based on Takagi–Sugeno fuzzy controller and equipped an active seat suspension with it. The performance enhancement and stability of the controller are verified experimentally and theoretically. However, the determination of fuzzy rules in the controller relies on expert experience. They cannot be changed once set, which results in poor adaptive capability of fuzzy control. Its control accuracy is affected by the magnitude of the controlled quantity. The above active seat suspension control method effectively suppresses the vibration of the seat. Therefore, it has a broad application in vibration reduction.
There is inevitable inherent time-delay in active seat suspension including sensor data collection time, controller calculation time, actuator response time, and data transmission time. 23 The inherent time-delay of the system is an unfavorable factor, which can lead to instability, even bifurcation, and chaos in the system.24-26 The inherent time-delay has often been offset by time-delay compensation.27,28 However, Olgac et al.29,30 found that the system vibration can be effectively suppressed by using the time-delay that favors the reduction of vibration as a system active control parameter. Vyhlídal et al. 31 proposed an acceleration time-delay feedback to suppress vibrations and provided a method for the design of absorbers. Dai and Zhao 32 studied the negative stiffness time-delay feedback control dynamic vibration absorber, which greatly reduces the amplitude and widens the effective vibration reduction frequency band. Meng et al. 33 designed a time-delay vibration absorbing system based on the optimization criterion of equal-peak property, which effectively suppressed the vibration peak of the system. Wu et al. 34 applied time-delay feedback control to vehicle suspension, which can greatly suppress harmonic excitation. However, the investigation on random excitation was not included in his study. The optimization of time-delay feedback control can be achieved after obtaining the optimal time-delay and feedback gain based on state variables. Time-delay feedback control has better precision and robustness than active control because the inherent time-delay is taken into account. This control method is widely used in the absorbers and vehicle suspensions because of above advantages. However, time-delay feedback control has not been applied to active seat suspension currently.
In this paper, the time-delay of the active suspension control system is considered, and an active seat suspension with time-delay feedback control is proposed. The optimal time-delay feedback control parameters (the time-delay including inherent time-delay and input time-delay of the controller and the feedback gain) can be obtained based on the optimization of particle swarm, which provides a new idea for seat vibration reduction. The contributions of this paper are as follows: • The active seat suspension with time-delay feedback control was proposed. This kind of seat suspension can enhance ride comfort and handling stability. Besides, its installation is easy compared with vehicle suspension because only a set of time-delay control mechanisms inside the seat is required. • The stability of the whole time-delay system was studied based on characteristic root and stability switching. The critical time-delay stability region of the system was obtained, and the stability bound was verified numerically. • The effect of passenger’s weight on the performance of the active control seat in vibration reduction was studied. It is found that this control method is highly adaptable to the perturbation of passenger’s weight. Hence, it has good robustness.
The paper is organized as follows: Firstly, a 3-DOF vehicle model with time-delay feedback control seat suspension is established. Secondly, the stability of the time-delay system is analyzed and verified numerically. Thirdly, the effect of the time-delay feedback parameters on the suspension performance is studied and compared with the passive suspension. Fourthly, the time-delay differential equations are solved numerically, and the minimum value of the objective function is optimized based on PSO. In addition, the active seat suspension with optimal time-delay feedback control is simulated in both time-domain and frequency-domain. Finally, a summary of the whole paper is given.
Active seat suspension model
To study the effect of time-delay feedback control on seat suspension, the vehicle model is simplified. A 1/4 suspension dynamics model with time-delay feedback control is shown in Figure 1.35,36 This model includes the vertical motion of the seat, vehicle body, and wheel. 3-DOF seat suspension model.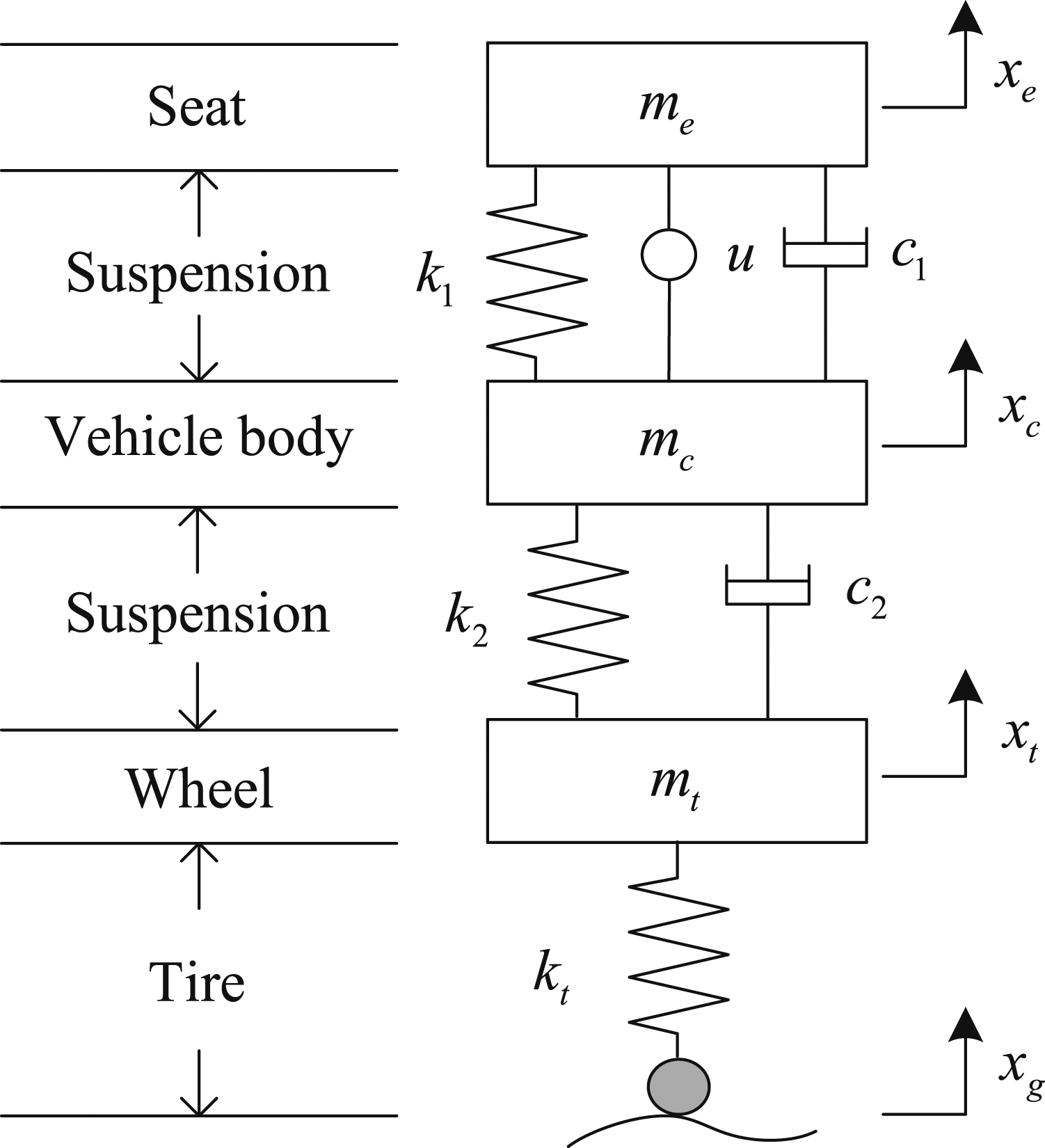

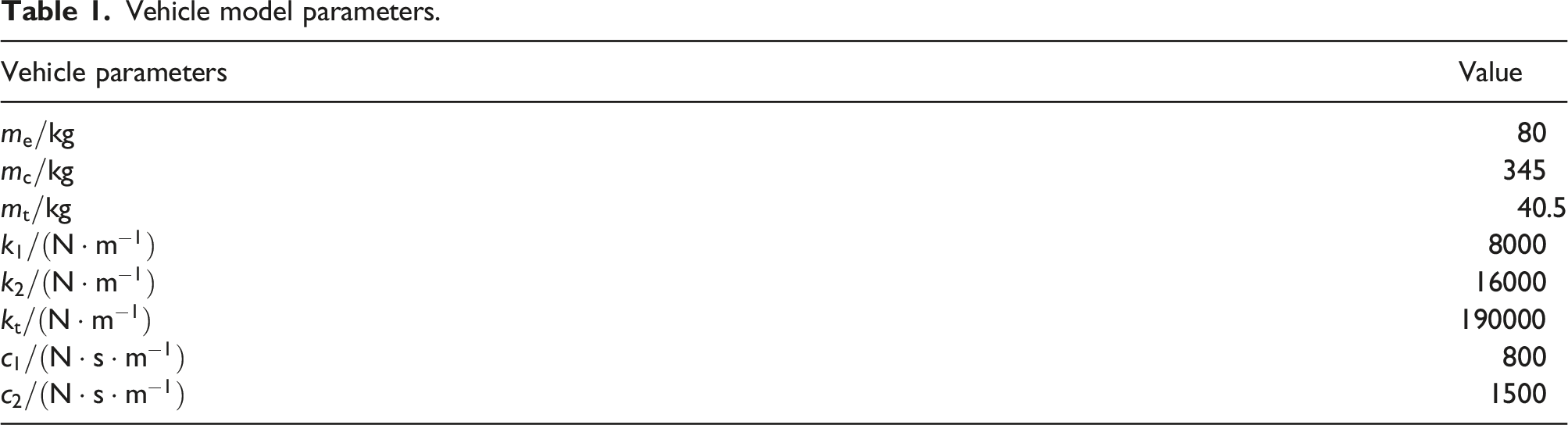
Vehicle model parameters.
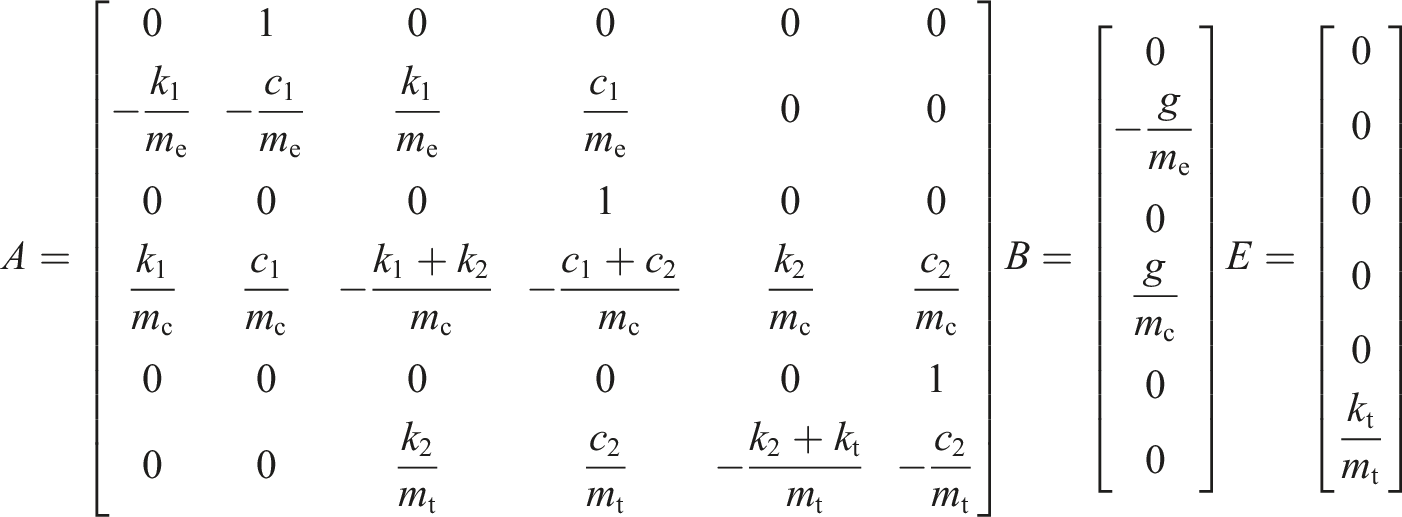
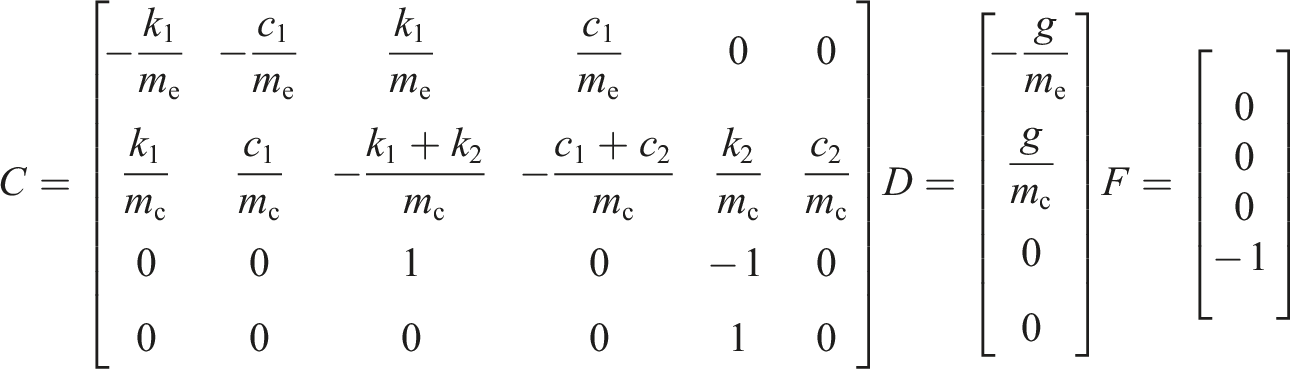
According to the evaluation indexes of ride comfort, grounding performance, and dynamic travel performance, the state variable 
Stability analysis and numerical verification
Time-delay independent stability
Time-delay displacement feedback control can cause disturbance to the suspension system. To ensure the stability of the system, the stability analysis of the time-delay system is carried out using the methods of characteristic root and stability switching. The time-delay independent stability region is a region determined based on gain coefficient, in which the stability of system is not affected by time-delay.
By Laplace transform of equation (1), the characteristic equation of the system can be obtained

It can be known from the stability theorem that if time-delay independent stability is satisfied in a linear system, the following conditions should be met. (a). The polynomial of the characteristic equation corresponding to (b). The polynomial of the characteristic equation corresponding to
When 

It can be known that the stability conditions Routh–Hurwitz stability conditions.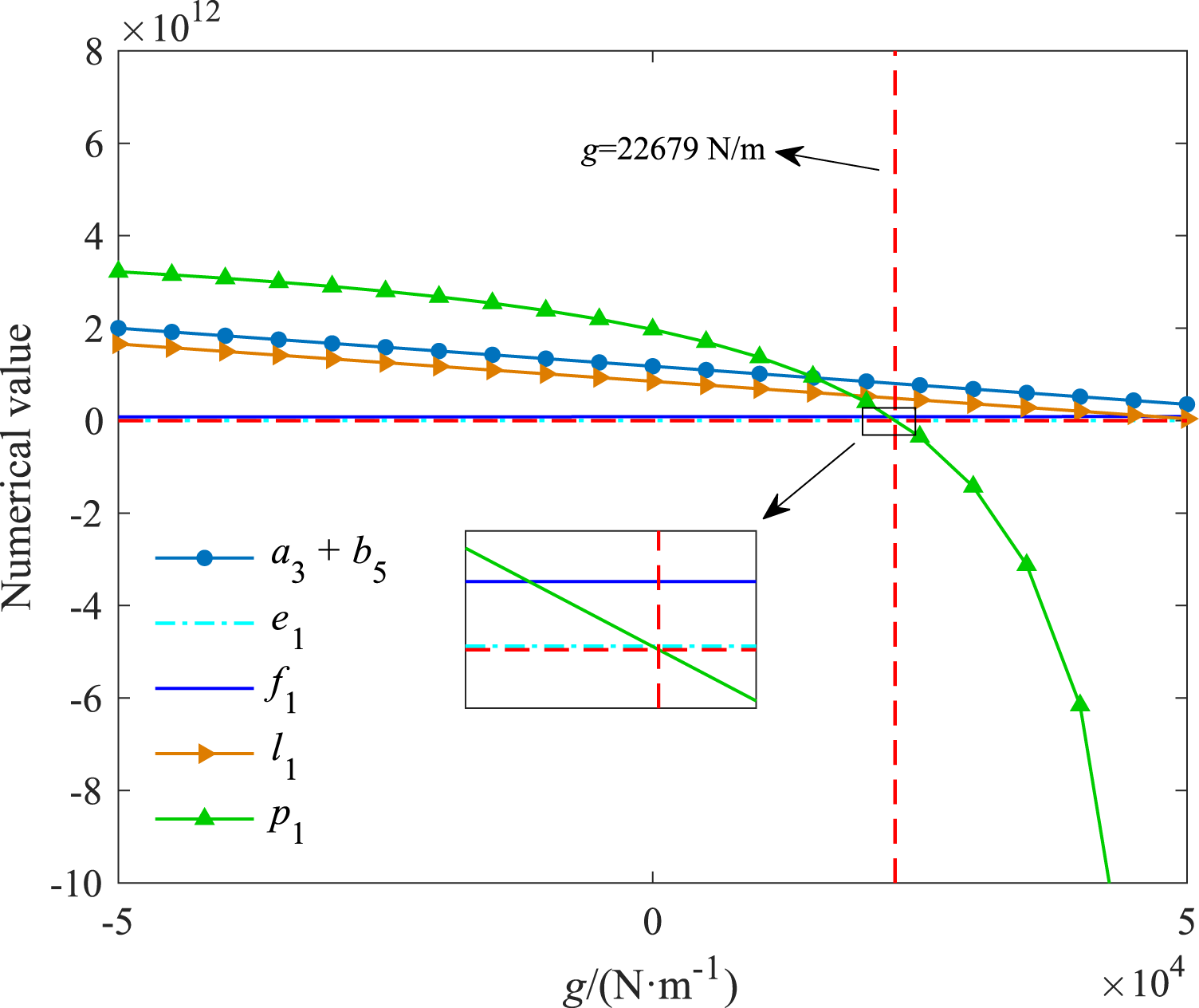
Figure 2 shows that when
Condition (b): When Time-delay independent stability region.





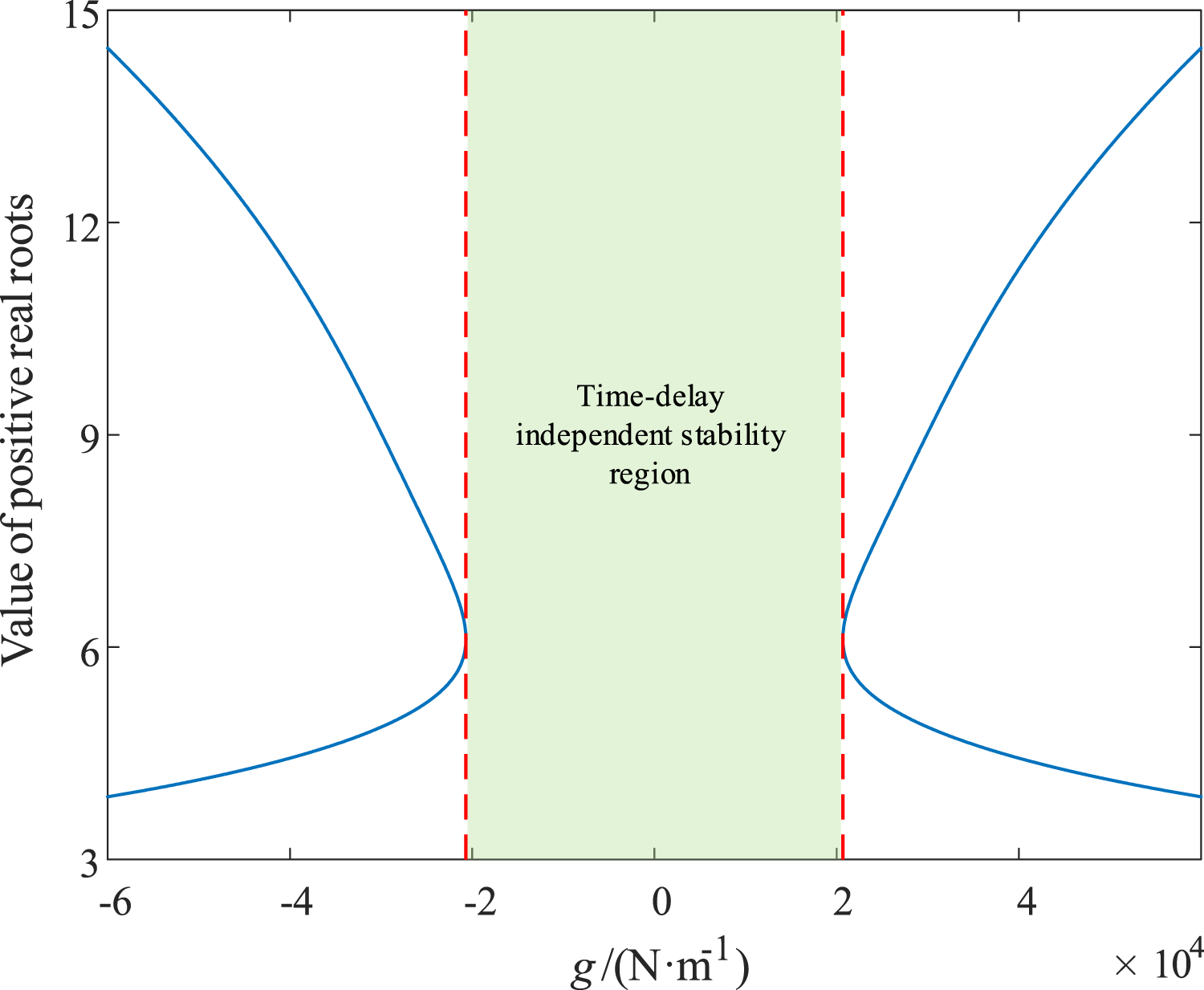
According to Figure 3, when
System stability switching
Outside the region of time-delay independent stability, the system stability is not fixed. The real part of the characteristic root changes sign as the time-delay increases, which means that the system stability changes by changing the time-delay. 37
Assuming that the equation has a positive real root 
After getting the critical time-delay, it is necessary to judge the change in the real part of the characteristic root corresponding to each critical time-delay point and thus the change in system stability. Equation (3) can be viewed as a function of 
The positive real roots are solved by using the characteristic equation under the condition that the gain coefficient is known. If there are no positive real roots of the equation, the system does not undergo stability switching, that is, the system is stable regardless of the value of System critical stability graph.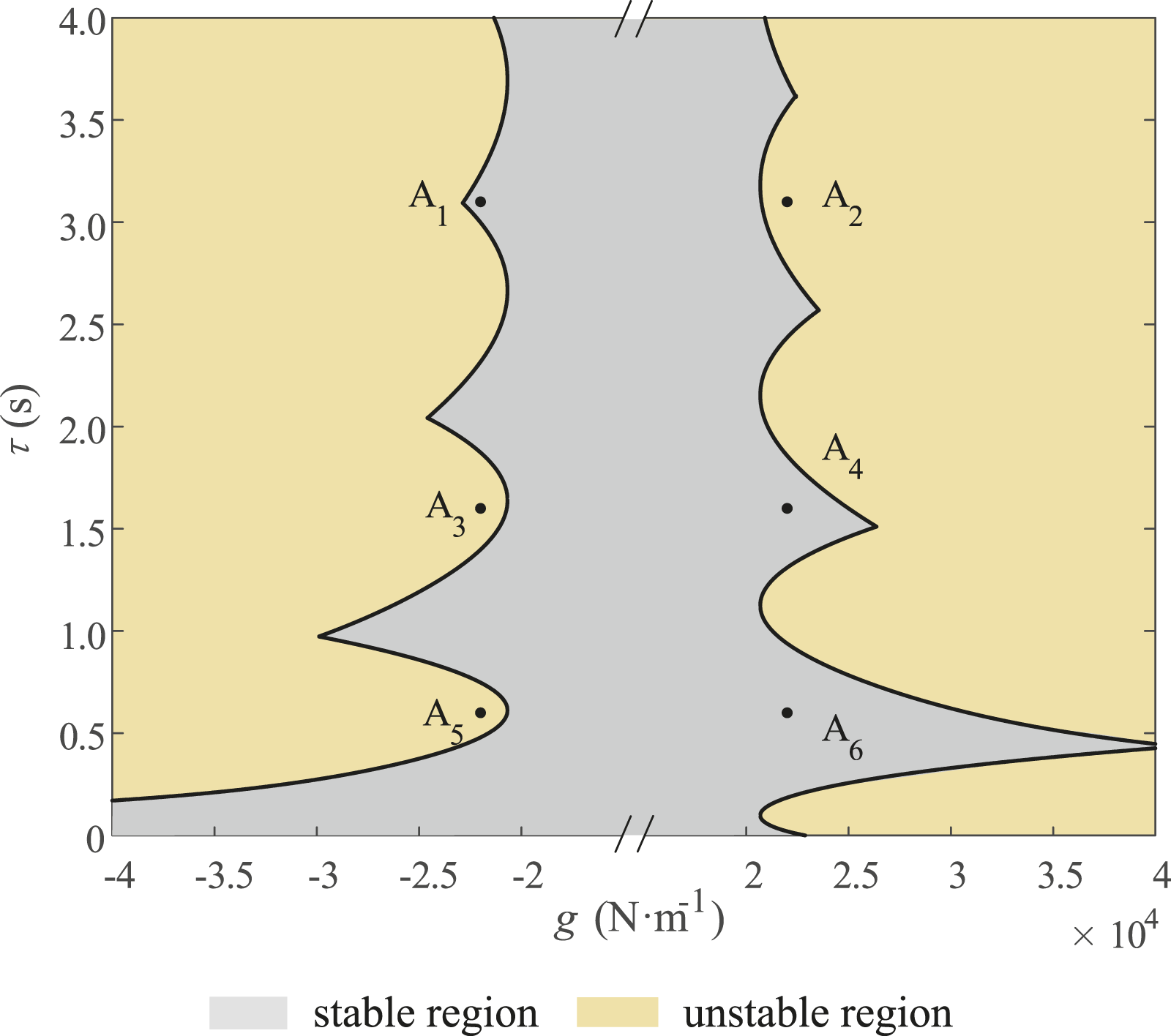
Stability verification
To verify the correctness of Figure 4, three points are randomly selected in the stable region and unstable region of the system. Among them, points Numerical validation of SA: (a) point A1, (b) point A2, (c) point A3, (d) point A4, (e) point A5, and (f) point A6.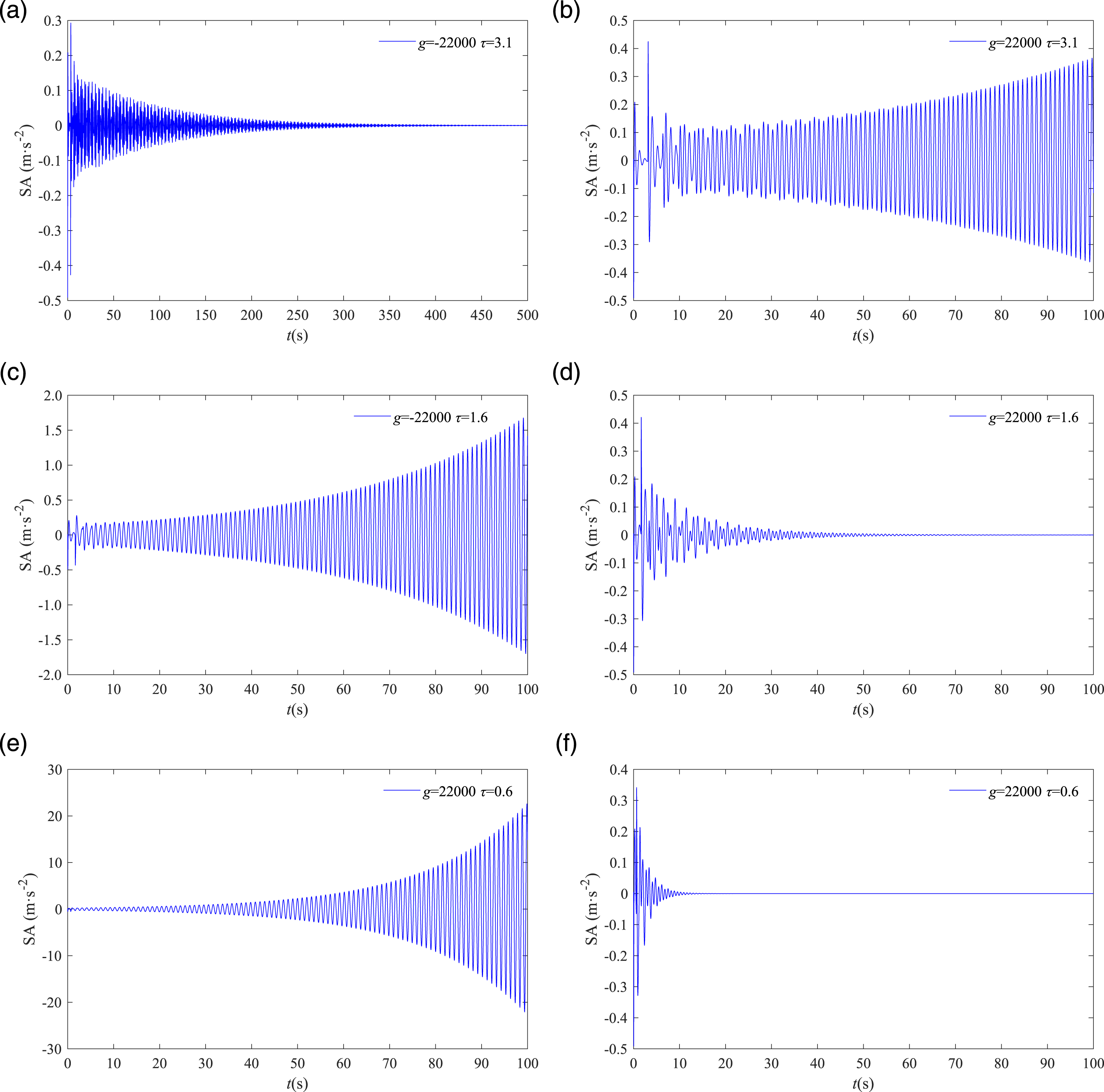
As can be seen from Figure 5 that when the tire is given an initial excitation, the vibration amplitude of SA gradually converges to zero and then the system is asymptotically stable. The vibration amplitude of SA gradually diverges to infinity and then the system is unstable. The verification results in Figure 5 are consistent with the system stability corresponding to A1-A6 in Figure 4, and the numerical simulation verifies the correctness of the critical stability curve.
Effect of feedback control parameters on system vibration
To investigate the effect of time-delay and gain coefficient on the seat and system vibration, different feedback control parameters are selected for numerical simulation in the stability region of the system in Figure 4. Road surface input simple harmonic excitation is given as Response results of suspension performance indexes under different time-delay: (a) time-domain response of SA, (b) time-domain response of BA, and (c) time-domain response of tire displacement.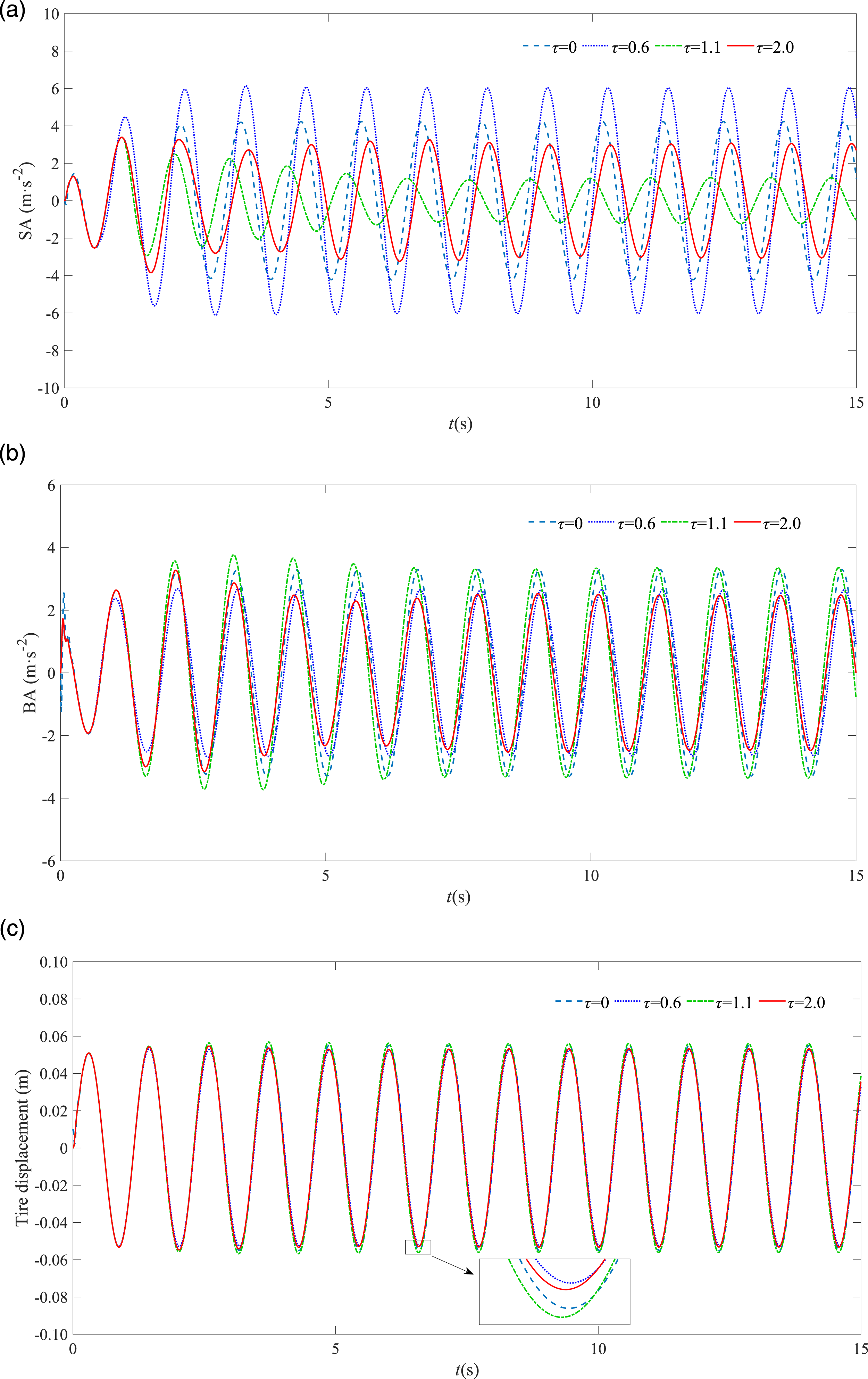
RMS of suspension performance indexes with different time-delay.

When Response results of suspension performance indexes under different gain coefficients: (a) time-domain response of SA, (b) time-domain response of BA, and (c) time-domain response of tire displacement.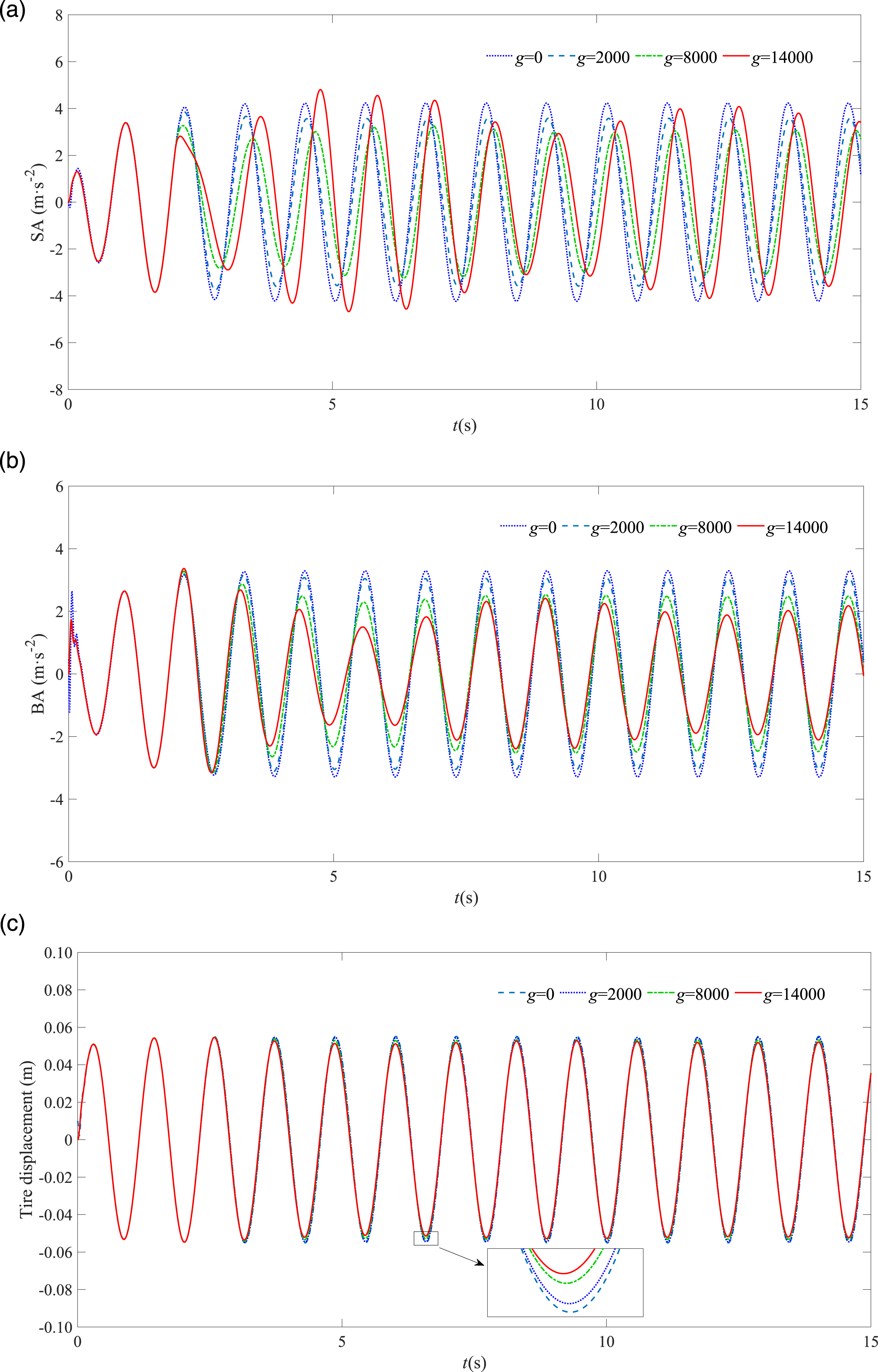
RMS of suspension performance indexes with different gain coefficients.

From the comprehensive analysis of Figures 6 and 7, both time-delay and the gain coefficient can affect the performance index of the suspension. The feedback parameters are different and have different vibration reduction effects on the system. The introduction of feedback parameters does not produce a large vibration to the tire amplitude. And the restrictive relationship between SA and BA shows that the optimal state of one performance cannot be pursued unilaterally while ignoring the deterioration of other performance. Therefore, a set of optimal feedback parameters must be found through optimization so that it does not deteriorate a certain performance index, but also minimizes the vibration of the system.
Solution of optimal feedback control parameters
Method of solving the time-delay equation
In the process of solving the control parameters by the frequency-domain method, the characteristic equation contains a transcendental function term, which is difficult to solve. Therefore, the numerical solution of the vibration system of the quarter-vehicle model can be solved by using the precise integration method of the time-delay differential equation.
The time-delay feedback control term in equation (2) can be regarded as an excitation term. According to the matrix differential equation theory, its solution can be written as
Assuming the simulation time 

It can be seen that the above equation is a self-starting recursive algorithm. Solving the solution of equation (14) gives
Finally, by substituting equation (15) into equation (1), the vibration acceleration of the seat and body in the time-domain can be obtained
Establishment of the objective function
To optimize the overall vibration reduction performance of the system, the RMS values of SA,SDD,BA and TDD are used as the multi-objective optimization function J.

Control parameter optimization
In this paper, the PSO algorithm is selected to optimize and solve the feedback control parameters. The design goal of the active seat suspension system is to reduce vehicle vibration on the uneven road surface as much as possible under the premise of ensuring the safety of the vehicle. The PSO algorithm solves the optimization problem by simulating the predatory behavior of bird flocks in nature. Its advantages such as fast convergence, high accuracy, and operability have received widespread attention and have great superiority in practical applications. 38 The specific steps of the PSO algorithm are as follows:
Within the search range of the feedback parameters, n pairs of feedback parameters
Each pair of feedback parameters
The fitness values of the objective function
After a set of feedback parameters are obtained, the position and velocity of feedback parameters need to be updated. The update rules are as follows
The feedback parameters are optimized for the second group (m=2). The individual optimal value
The above steps are repeated to continuously update the global optimal value in the matrix. When the number of cycles reaches the set number of iterations, the system outputs the optimized optimal feedback parameters. The algorithm steps are shown in Figure 8. Flow chart of PSO steps. In the algorithm, 40 particles are randomly generated and 100 iterations of optimization are prescribed. The advantage of the time-domain algorithm for the objective function is that the different excitations of the road surface can be introduced into the solution of the optimal feedback parameters, and the optimal feedback parameters can be found for different road surfaces. The road surface displacement inputs are selected as simple harmonic excitation and random excitation. The change of the fitness value with the number of iterations under different road excitation is shown in Figure 9. From this figure, the objective function gradually decreases with the increase of the number of iterations, and the optimal time-delay parameters are basically obtained at the late iterations. Finally, the optimal feedback parameters under simple harmonic excitation are 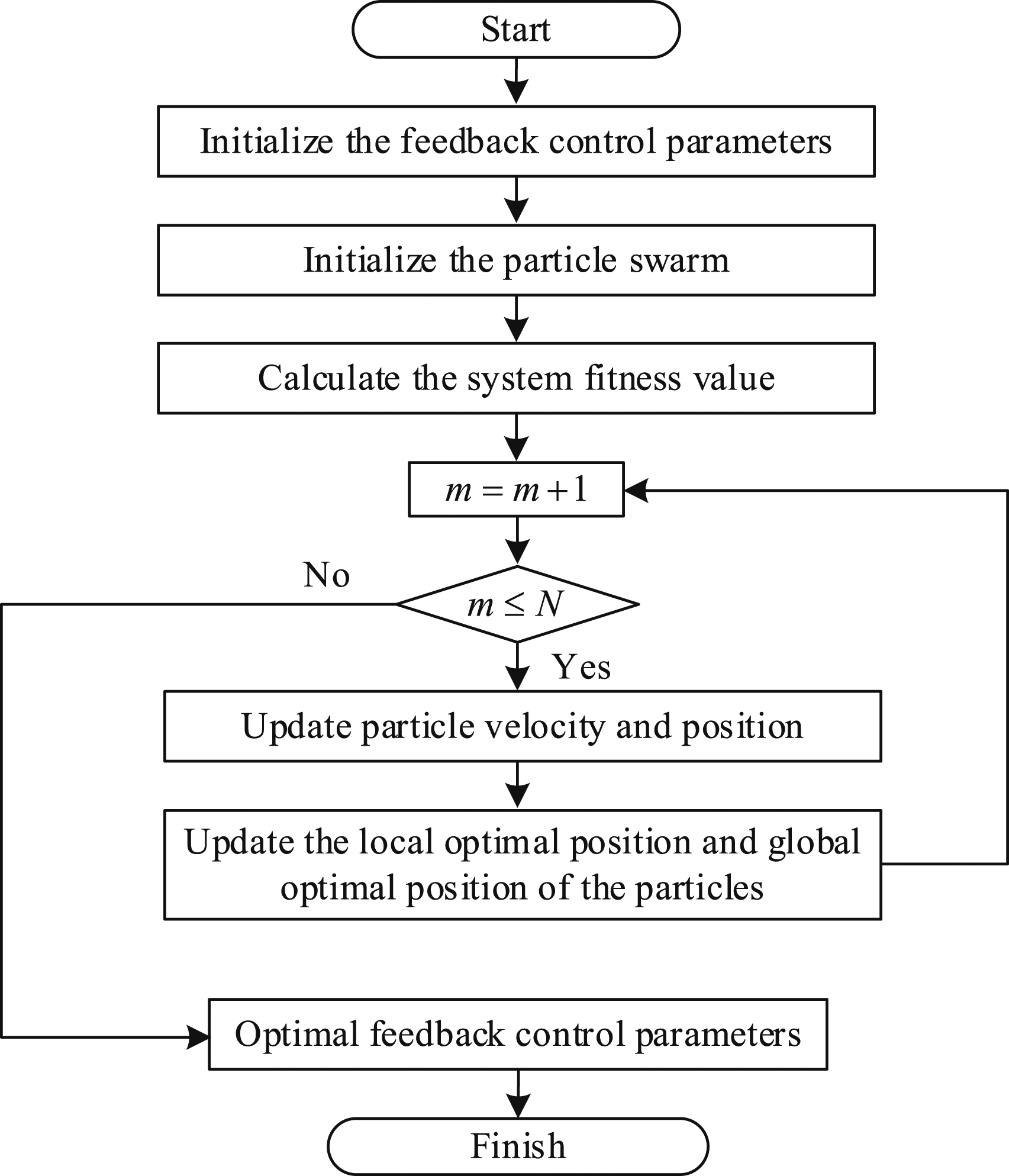
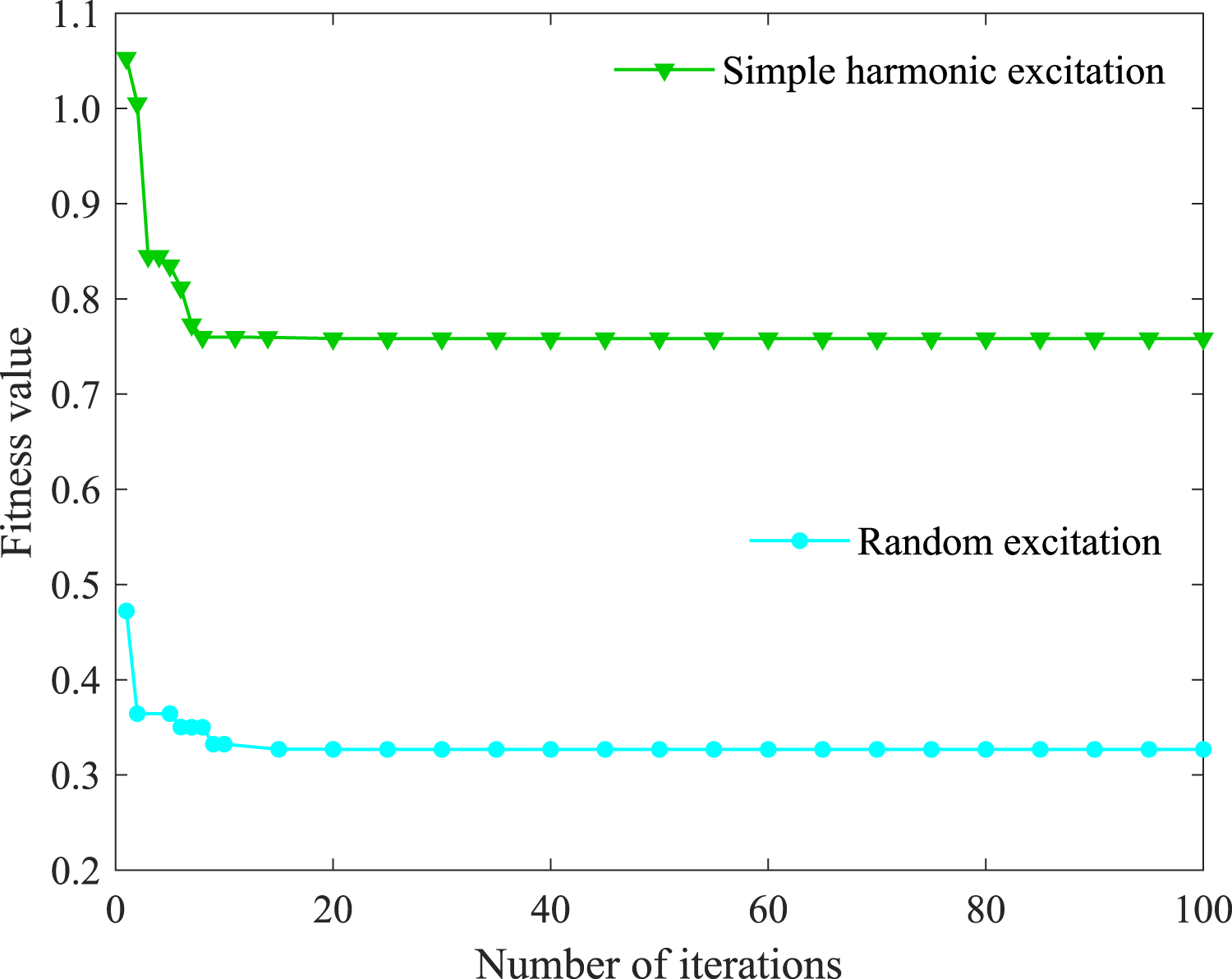
Iterative change of the objective function.
Simulation of Optimal Feedback Control Parameters and Analysis of Results
Frequency-domain analysis
During the process of driving, the human body has a different sensitivity to the vibration of each frequency band of the vehicle. Bringing the optimal feedback parameters Amplitude–frequency characteristic curve of each suspension performance index: (a) SA, (b) BA, (c) SDD, and (d) TDD.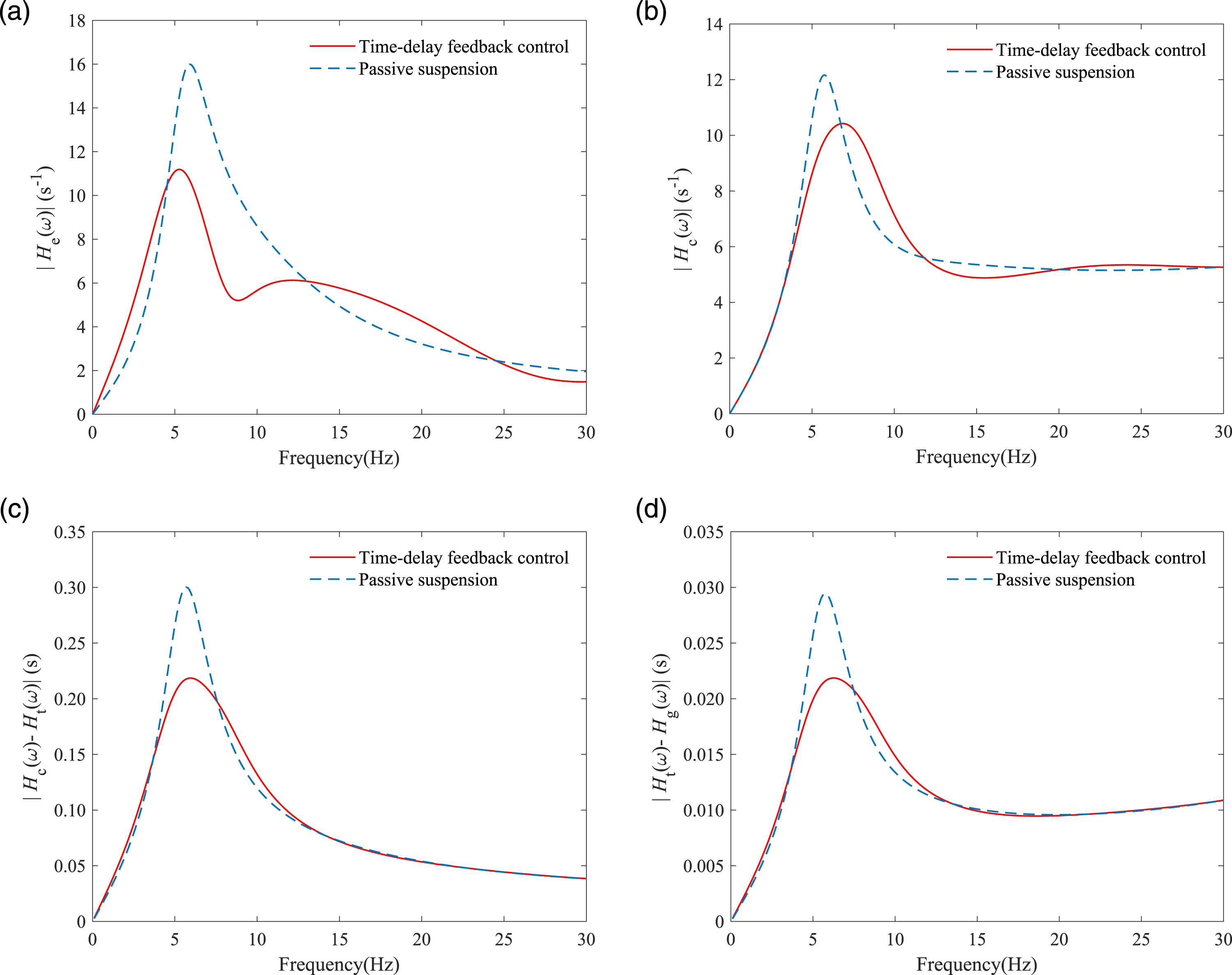
Figure 10(a) shows that the active seat suspension can significantly reduce the SA, especially in the frequency band of 4.5 Hz–13.5 Hz, but there is some deterioration near the low- and high-frequency bands. The amplitude of BA with time-delay feedback control in Figure 10(b) is effectively attenuated at resonance but deteriorates at 7 Hz–11.5 Hz. These conditions are consistent with the restrictive relationship between SA and BA described in Section 4. From Figure 10(c) and (d), it can be seen that compared with the passive suspension, the active seat suspension can significantly attenuate the peak amplitude–frequency characteristics in the resonance region of SDD and TDD and has less effect on them in the high-frequency band. Overall, time-delay feedback control can effectively improve ride comfort and vehicle handling stability near the natural frequency of body vibration.
Time-domain analysis under simple harmonic excitation
Substituting the feedback parameters Comparison of simulation results under simple harmonic excitation: (a) SA, (b) BA, (c) SDD, and (d) TDD.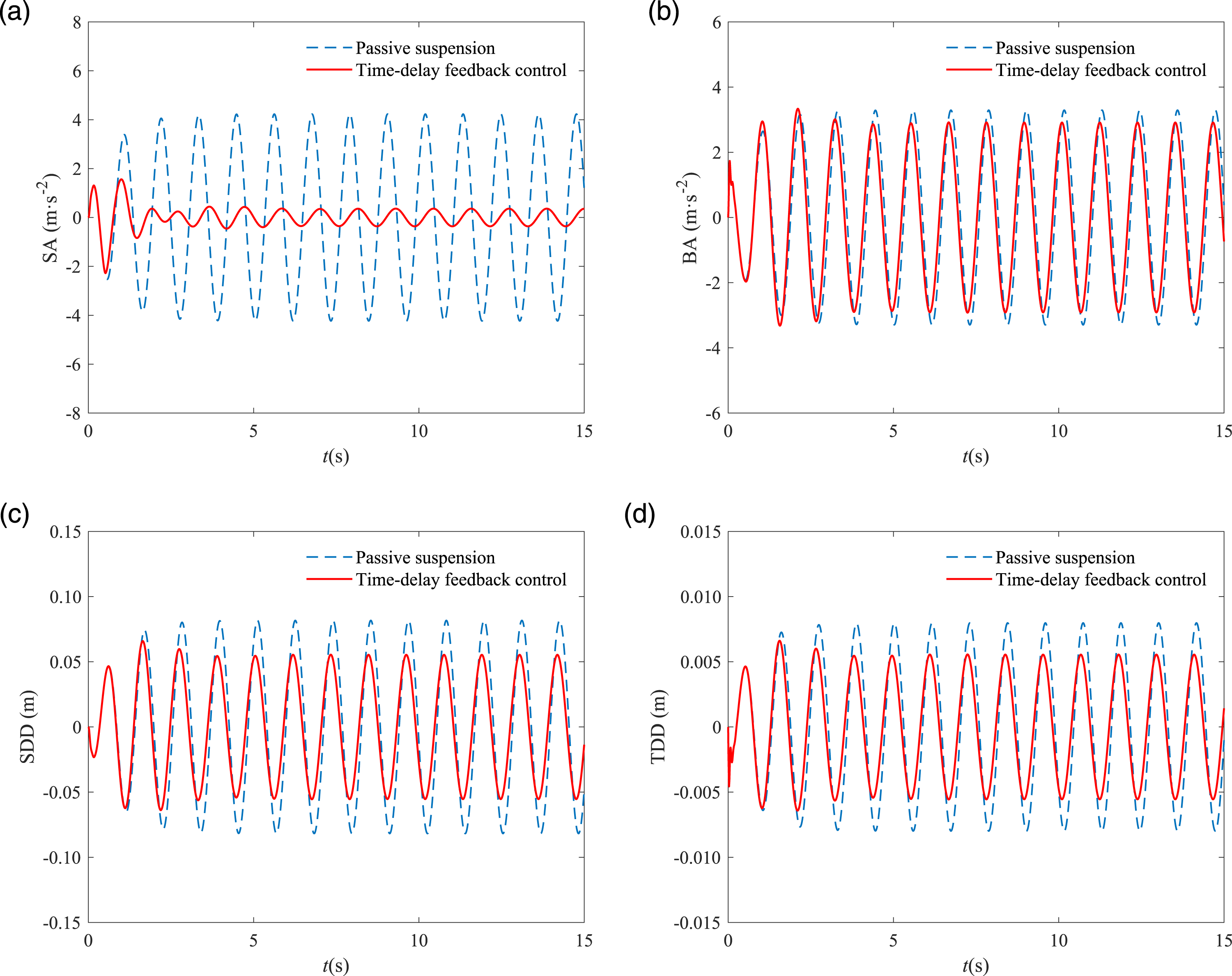
RMS of system response under simple harmonic excitation.

Time-domain analysis under random excitation
To further investigate the vibration reduction performance of time-delay feedback control on the system, random excitation is selected as the road input. The time-domain diagram of the B-class pavement displacement excitation is simulated using MATLAB, as shown in Figure 12. Similarly, the feedback parameters B-class pavement displacement excitation. Comparison of simulation results under random excitation: (a) SA, (b) BA, (c) SDD, and (d) TDD.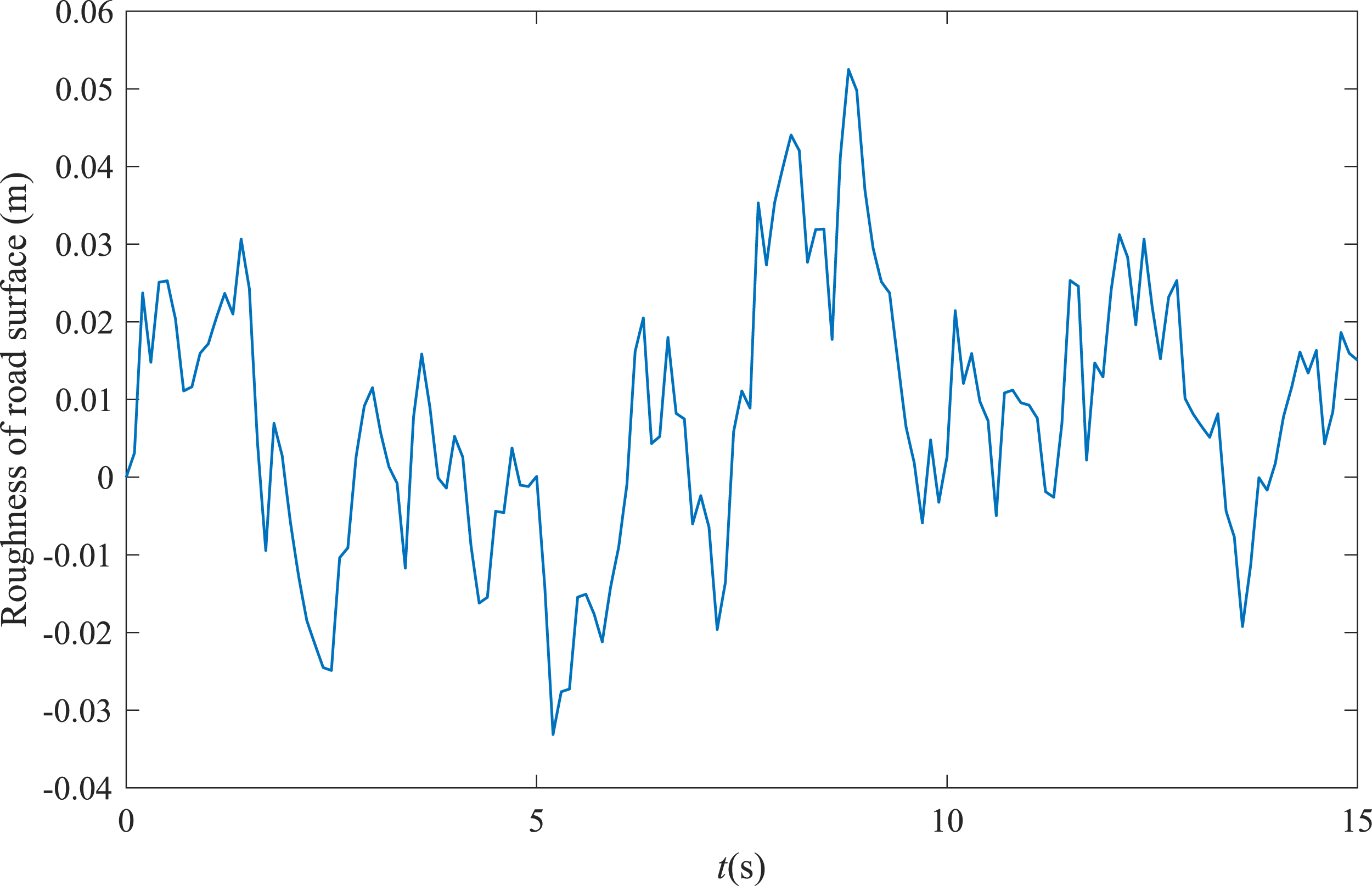
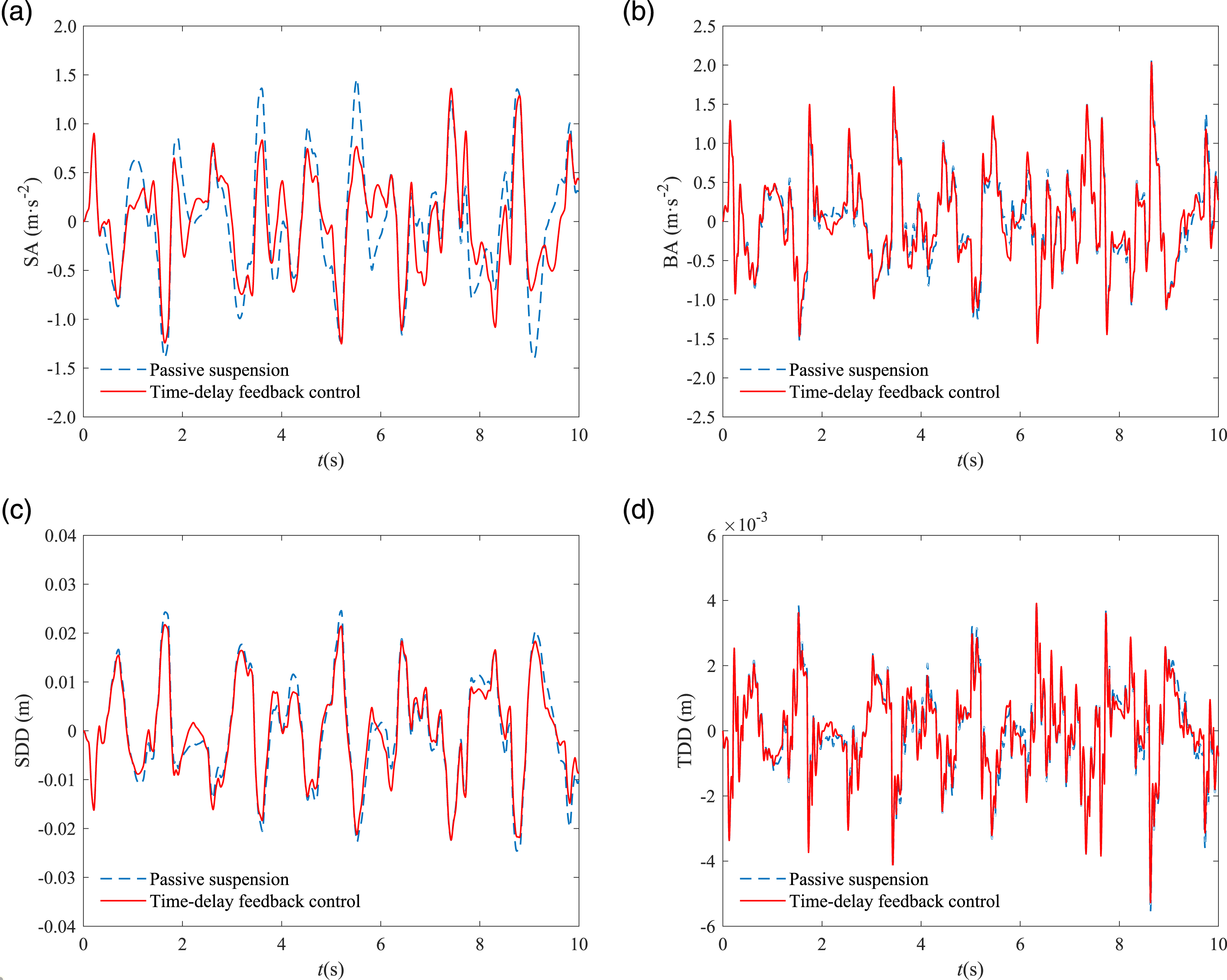
RMS of system response under random excitation.

The effect of parameter perturbation on the vibration reduction performance of feedback control with time-delay
In real life, the weight of passengers is different, which can affect the effect of time-delay feedback control on seat vibration reduction. The optimal situation is that after the passenger’s weight changes, the time-delay feedback control will adjust the optimal feedback parameters in time to reduce the vibration of the seat to a minimum. This time-varying time-delay will be studied in the future. In this paper, the effect of passenger weight change on reducing seat vibration is investigated while the optimal feedback parameters are kept constant.
Keeping the suspension model parameters in Table 1 and changing the seat (including passenger) weight by 10%, Frequency-domain simulation curves. Time-domain simulation curves.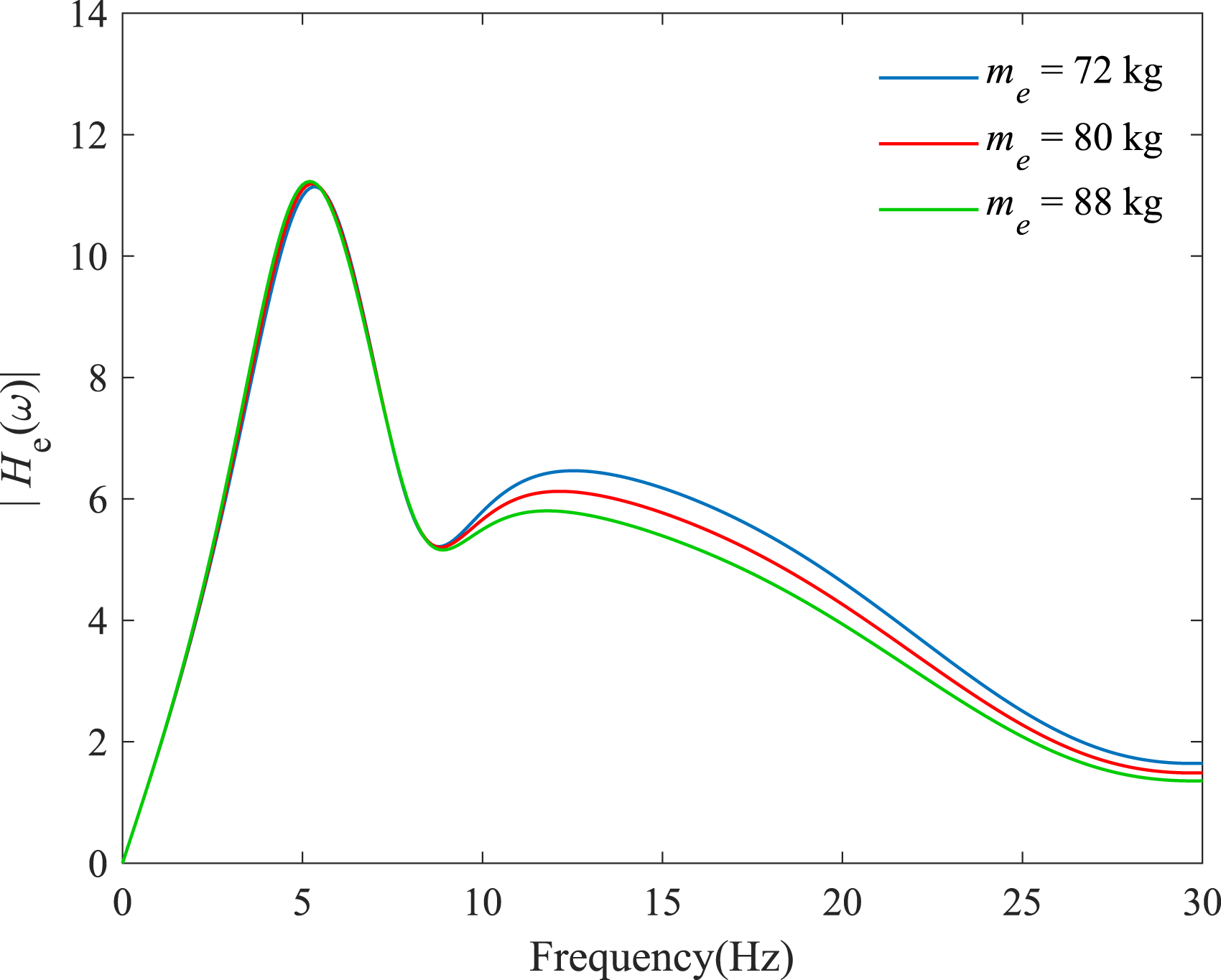
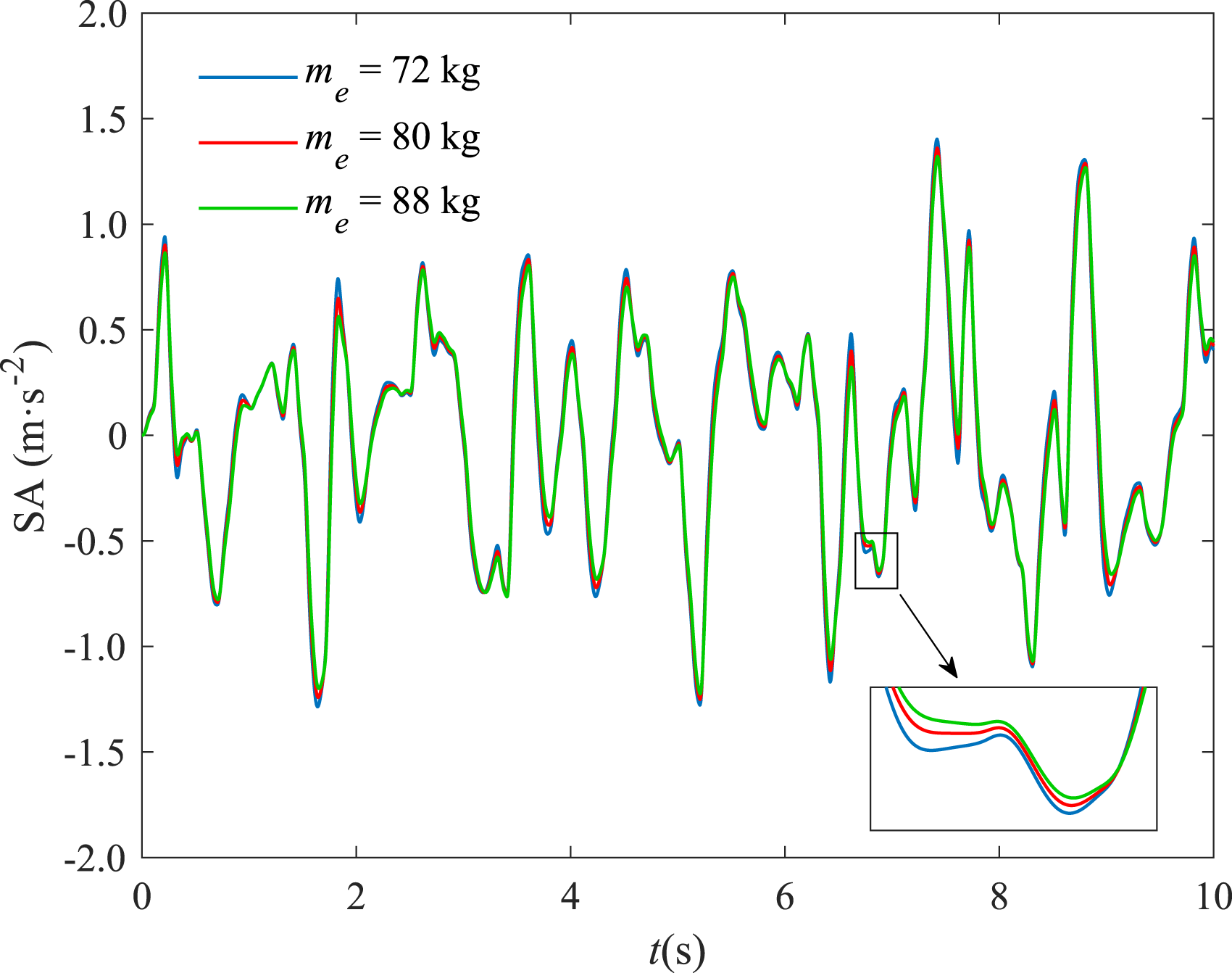
From Figure 14, it is clear that the increase of passenger weight causes a slight increase in the amplitude at the first-order intrinsic frequency of the system but causes a significant decrease in the amplitude at the second-order intrinsic frequency. At the same time, the increase in passenger weight reduces the amplitude of frequencies above 9 Hz. Compared with the passive suspension, the seat frequencies under the time-delay feedback control decrease by 13.03%, 16.04%, and 18.66% for a passenger weight of 72 kg, 80 kg, and 88 kg, respectively. From Figure 15, the amplitude of the SA decreases gradually with increasing passenger weight. Compared with the passive suspension, the RMS values of the SA decrease by 14.87%, 16.84% and 18.63% for a passenger weight of 72 kg, 80 kg, and 88 kg, respectively. From the frequency-domain and time-domain simulation analysis, it can be concluded that when the passenger weight changes, the time-delay feedback control can still guarantee a good vibration reduction effect on the seat. It can be seen that the time-delay feedback control has strong adaptability. At the same time, the parameter perturbation has an effect on the vibration reduction performance of the time-delay feedback control. Generally speaking, the greater the passenger weight, the more effective the time-delay feedback control is in vibration reduction on the seat when the optimal feedback control parameters are constant.
During the simulation, it is found that the time-delay feedback control could decrease the RMS of seat acceleration by 16.84% under the optimal feedback control parameters
Conclusions
In this paper, a time-delay feedback control strategy based on body displacement was applied in the seat suspension system, which is mainly used to suppress the vertical vibration of the vehicle seat and improve comfort. The stability analysis of the 3-DOF time-delay feedback control system was carried out, and the effect of feedback control parameters on the system vibration was studied. Taking the RMS sum of the suspension performance indexes as the optimization objective, the optimal feedback parameters under different excitations were obtained. The simulation analysis of optimal feedback parameters was also carried out. The conclusions are as follows: (1). The critical time-delay stability region of the system was obtained using the method of characteristic root and stability switching. Both time-delay and gain coefficient affect the vibration phase and the stability of the system. It is found that the stability of the system is not affected by time-delay in a time-delay independent stability region. In other gain coefficient intervals, the stability of the system is affected by the size of the time-delay. It shows that the system first switches between stable and unstable as time-delay increases and eventually becomes unstable. (2). The seat suspension with time-delay feedback control was analyzed in both time-domain and frequency-domain. The results show that under simple harmonic excitation, the RMS of SA of the active seat suspension controlled by the time-delay feedback is reduced by 84.7% compared with the passive suspension. Under random excitation, the RMS of SA of the active seat suspension controlled by the time-delay feedback is reduced by 16.84% compared with the passive suspension. It can be seen that the time-delay feedback control can significantly reduce seat vibration and improve the ride comfort. At the same time, other performances of the vehicle have been also improved, which increases the handling stability of the vehicle. (3). The effect of passenger’s weight on the vibration reduction of the time-delay feedback control method was investigated. The results show that good vibration reduction performance can be guaranteed using this method because passenger’s weight has little impact on the vibration reduction performance. This indicates that the time-delay feedback control has strong adaptability and robustness.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (Grant No. 51275280).