
Abstract
A high-speed-level gear transmission system model of a wind turbine is presented considering a time-varying wind load and an electromagnetic torque disturbance, along with eccentricity, dynamic backlash, and friction force. The auto-regressive model is employed for simulating the time-varying wind load in the realistic wind field as external excitation. A doubly fed induction generator model of the wind turbine is established to calculate the disturbance quantity of electromagnetic torque. The nonlinear differential equations of the system are strictly deduced using Lagrange equation and solved by the fourth-order Runge-Kutta method. The effect of friction on the dynamic response of the high-speed-level gear transmission system is analyzed with the time-varying wind load and the electromagnetic torque disturbance. These results show that the friction force is critical because frequency amplitude and components can be changed by it. The friction force also enlarges vibration displacement. The low-frequency components in the vertical direction are affected gravely by the friction force without electrical disturbance. In addition, sidebands exist in the vicinity of the low-frequency parts as the electromagnetic torque disturbance appears at the output end. The amplitude of the low-frequency component is further increased because of electromagnetic torque disturbance. This shows the frequency characteristics of the slight gear system fault. The study offers some fresh references into the design and diagnosis of the gear system.
Introduction
In recent years, research on nonlinear dynamic methods has been improved continuously. Many mathematical methods open a new door for the establishment of nonlinear dynamic analysis of a gear system.1–5 To ensure the stability and reliability of gear transmission systems, the dynamic characteristics of the gearbox should be investigated. Many outstanding scholars have researched a gear transmission system for different purposes and many outstanding results were obtained.6–14 Their study subjects included the planetary gear torsion vibration model, bending-torsional coupled model, and unipolar spur gear-rotor-bearing couple model.
In order to analyze approximately realistic vibration on the gear system of the wind turbine, scholars in mounting numbers started to apply different models to simulate the realistic wind speed. The wind load research is increasingly complex. Chen et al. 15 established a random wind speed as external excitation and the vibration response and dynamic mesh force mean are analyzed. Qin et al. 16 employed the auto-regressive (AR) model to simulate time-varying wind speed and load. A planetary gear model of the wind turbine was built using the lumped-mass method. It is depicted for the vibration of the planetary gear transmission system and dynamic mesh process in detail. Qin et al. 17 used Weibull distribution to simulate time-varying wind speed and load. The vibration displacement, velocity, and dynamic mesh force of the planetary gear transmission system were analyzed. Zhou et al. 18 used sparse least squares support vector machine (SL-SVM) to simulate the wind speed of the exact wind field and wind load. The coupled planetary gear-bearing model was established to research vibration displacement of all the parts and dynamic mesh force. Li et al. 19 researched the effect of non-torque loads on wind turbine drivetrain. Chuang et al. 20 studied the influence of second-order wave excitation loads on the coupled response of an offshore floating wind turbine.
In addition, the backlash is a critical factor to ensure stable and reliable running. Chen et al. 21 investigated dynamic backlash with the fractal feature and effect of the dynamic backlash on the 2-DOF gear system. Lu et al. 22 researched bifurcation characteristics on the gear transmission system with the stochastic backlash, which made an influence in the system responses. Liu et al. 23 investigated the dynamic backlash, which was affected by the dynamic center distance. The effect of the dynamic backlash and dynamic mesh angle was studied. Liu et al. 24 investigated the effect of the compound dynamic backlash on the gear-rotor-bearing transmission system. The response and frequency features of gear root crack faults were analyzed.
Although many types of research have been dedicated to investigating the gear system dynamic model of wind turbine generators considering shafts, bearings, or flexible systems, it is worth noting that the previous analysis for different excitation effect on the gear system of wind turbine generator was separately studied. Dynamic behaviors with dynamic backlash, time-varying wind load (front input excitation of gear system), electromagnetic torque disturbance (end output excitation of gear system) and friction force simultaneously are rarely researched. In addition, it is noteworthy that earlier researches of time-varying input/output load were mainly focused on the variation of force and displacement and the frequency analysis was ignored. Therefore, this paper is devoted to the theoretical study of the dynamic characteristics of the high-speed-level gear transmission system of the wind turbine under the simultaneous action of multiple excitations. A high-speed-level gear transmission system dynamic model of wind turbine generator is established using the lumped-mass method considering a time-varying wind load and an electromagnetic torque disturbance, along with eccentricity, dynamic backlash, and friction force. The nonlinear differential equations are deduced using the Lagrange equation. AR model is employed for simulating the realistic wind field and deducing varying wind load. In the case of variable wind load, a small grid voltage drop fault is imposed on the output, and electromagnetic torque variation is calculated by the doubly fed induction generator (DFIG) model. The equations are solved by the Runge-Kutta method. The vibration response of the gear system is attained. This displacement and frequency feature of parts are depicted in detail, which can provide a fundamental reference for the optimal design and monitor the gear system of the wind turbine.
Auto-regressive wind speed model
Pulsating wind speed can be considered the arbitrariness of the wind sites, wind spectrum characteristics, building characteristics and other conditions, which is simulated using a linear filtering method based on the autoregressive model. The pulsating wind speed is more representative than the actual observation record on the wind sites. The simulated method is widely used for simulating pulsating wind speed. In this model, a random series of white noise with zero mean is passed through a linear filter and its output is a stationary random process with specified spectral characteristics.
According to wind speed observational data, instantaneous wind speed consists of two elements including the average wind with a period of more than 10 min and the pulsating wind with a period of a few seconds.
The AR model of time-history V(t) column vector of spatially correlated pulsating wind speed with M points can be expressed as

The time history of wind speed can be further obtained. It can be described as

A high-speed-level gear transmission system dynamic model of a wind turbine
The research object in this paper is a high-speed-level gear transmission system of a wind turbine. Its structure is shown in Figure 1, marked red.
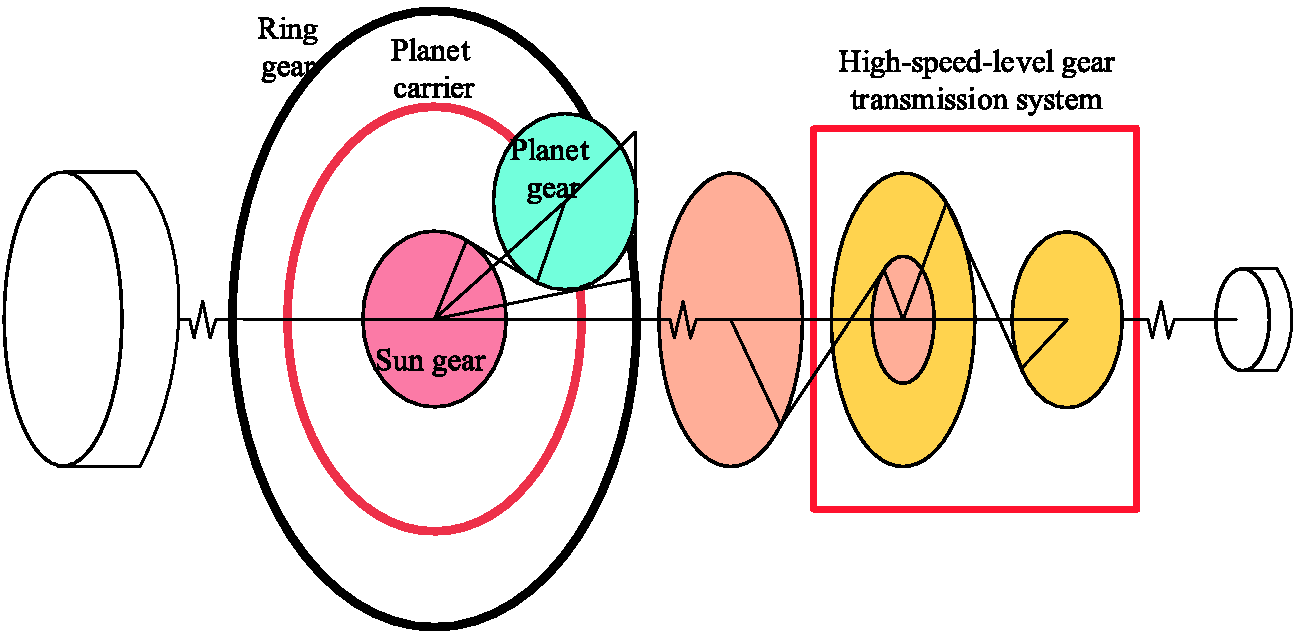
The planetary gear transmission of wind turbine structure sketch.
The lumped mass model of the high-speed-level gear transmission system
In this section, considering the lumped mass model is adopted to conduct the dynamic modeling of the high-speed-level gear transmission system aiming to preliminarily study the dynamic characteristics of the wind turbine gear system. This section is simplified as follows: Ignoring assembly errors, the gear shaft is strictly central to the input and output ends. The bearing is equivalent to a spring bearing with fixed stiffness. The bearing damping and meshing damping are equivalent to viscous damping The thermal deformation in the gearbox is ignored. Ignoring the torque loss and the torque control feedback of the wind turbine, the external excitation is calculated strictly according to the transmission ratio.
The gear mesh parameters are simulated by springs and dampers. The 16-DOF coupled bending-torsional spur gear transmission system model is shown in Figure 2.
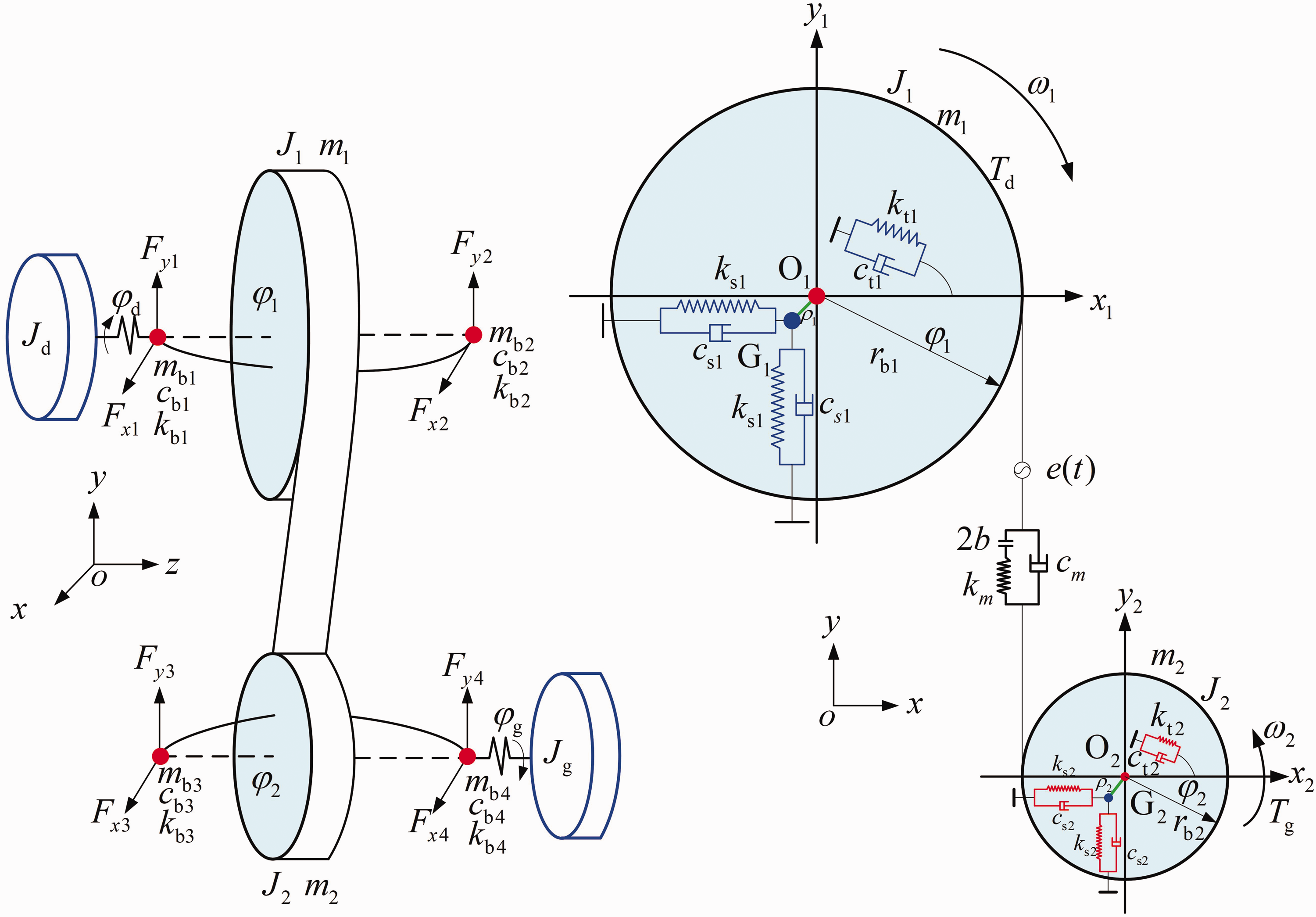
The 16-DOF bending-torsional coupled spur gear transmission system.
According to the established dynamic model, φ
i
(i = 1, 2, d, g) are respectively angle displacements of gear, pinion, input and output. The angle displacements are composed of an angle displacement ωit(i = 1,2) and microscopic displacement θi(t). The equations are defined to

Because the gear center and the center of gravity are different, the relationship of them is given by

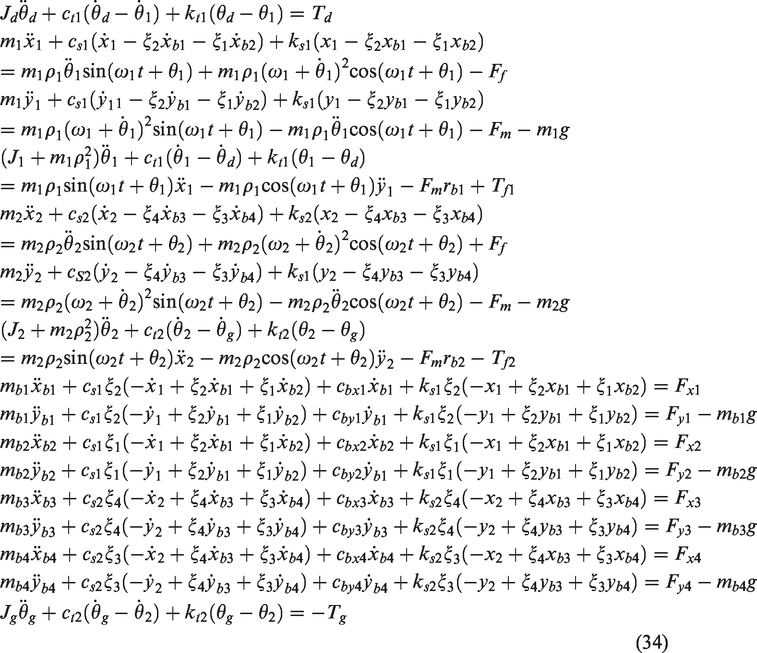
The elastic deformation of the shafts can be determined as

The deformation transmission error (DTE) caused by gear meshing along the line of action is described as

The dynamic force is defined as


The dynamic backlash bh(t) consists of a fixed backlash and a backlash variation value. The fixed backlash

The Friction force of the gear system model is shown in Figure 3. The speeds

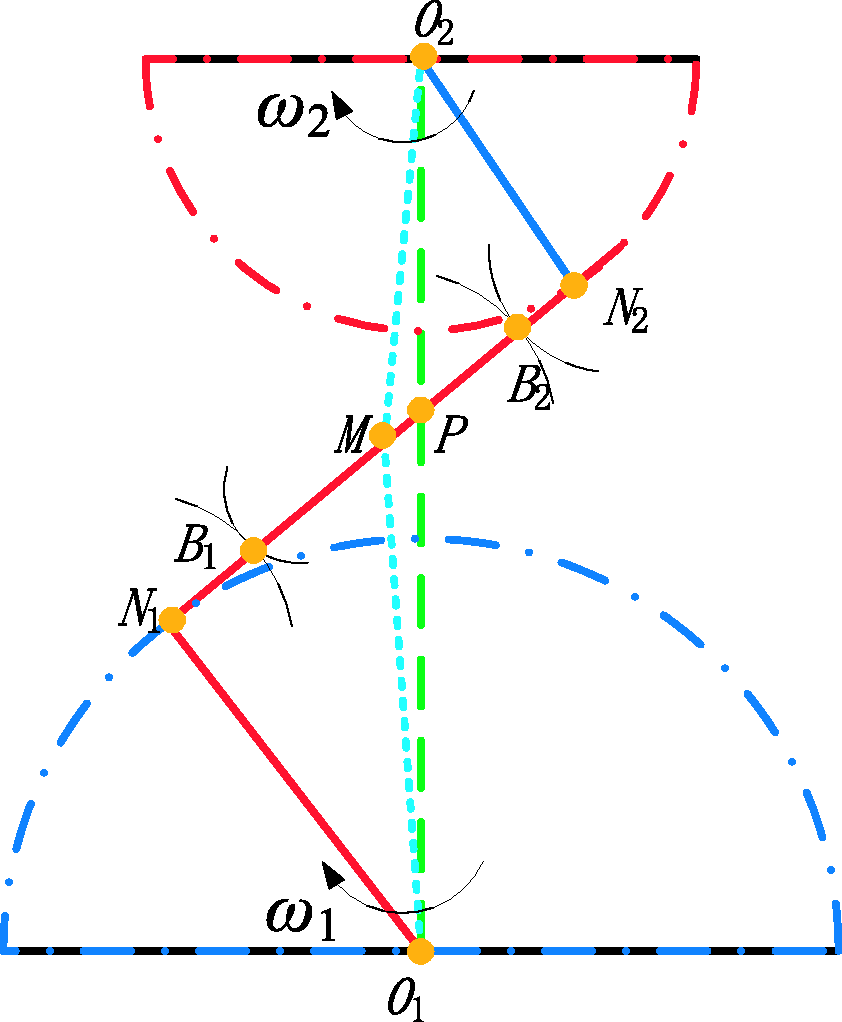
Simplified sketch of meshing.
The sliding speed Vs on the mesh point M is given by

According to the geometrical relationship, the friction arm

The sliding speed also can be changed as

The friction arms

The friction force and torques are given by

Dynamic model of ball bearing
The ball-bearing model is shown in Figure 4. Based on the ball model, the vi and vo represent the contact point velocities between the rolling elements and inner/outer rings are given by


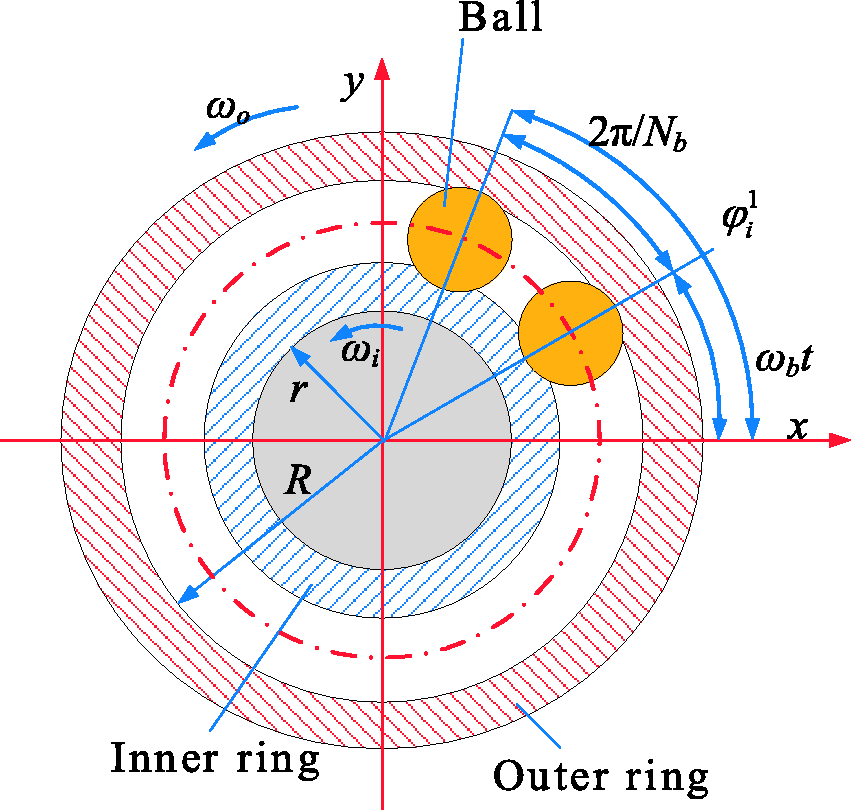
Rolling bearing model.
The angular velocity of the cage can be defined by

The angular displacement

The deformation of the ith rolling ball can be given by


Therefore, the bearing force can be defined by
External excitation of the system
The variation load of the wind turbine input terminal caused by the AR pulsating wind speed is set to system external excitation. Based on the aerodynamics, the Output power of wind turbine impeller

The wind wheel input torque

Without calculating the energy loss, the torque of each transmission system can be converted through the transmission ratio.
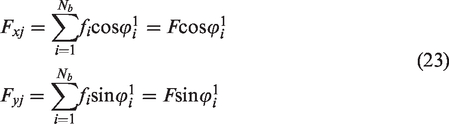
After considering electrical disturbance, the DFIG system model, as shown in Figure 5, is needed to establish.
DFIG model of wind turbine.
In the synchronous rotation coordinates, the voltage equation of the double-feedback wind generator is expressed as

The electromagnetic torque of the double-feedback wind turbine is expressed as

Mathematical model of the system
The mathematical vibration model of the high-speed-level gear transmission system can be derived by Lagrange’s equation. It is clearly expressed that the kinetic energy T, the dissipation energy R and the potential energy U, as shown in equations (28) to (32), can be calculated by the kinetic knowledge in the generalized coordinates of the high-speed-level gear transmission system.
It is easily understood that the gear system includes 16-DOF in this coordinate, and its expressing can be given by

The kinetic energy T can be calculated as follows

The dissipation energy R can be expressed in consideration of damping in the system as follows

Taking into account the gears, shaft and bearings deformations, the potential energy U can be given by

Considering gears’ gravity and input/output torque, the force vector F of the system in the generalized coordinate can be defined by

Lagrange’s equation is expressed by

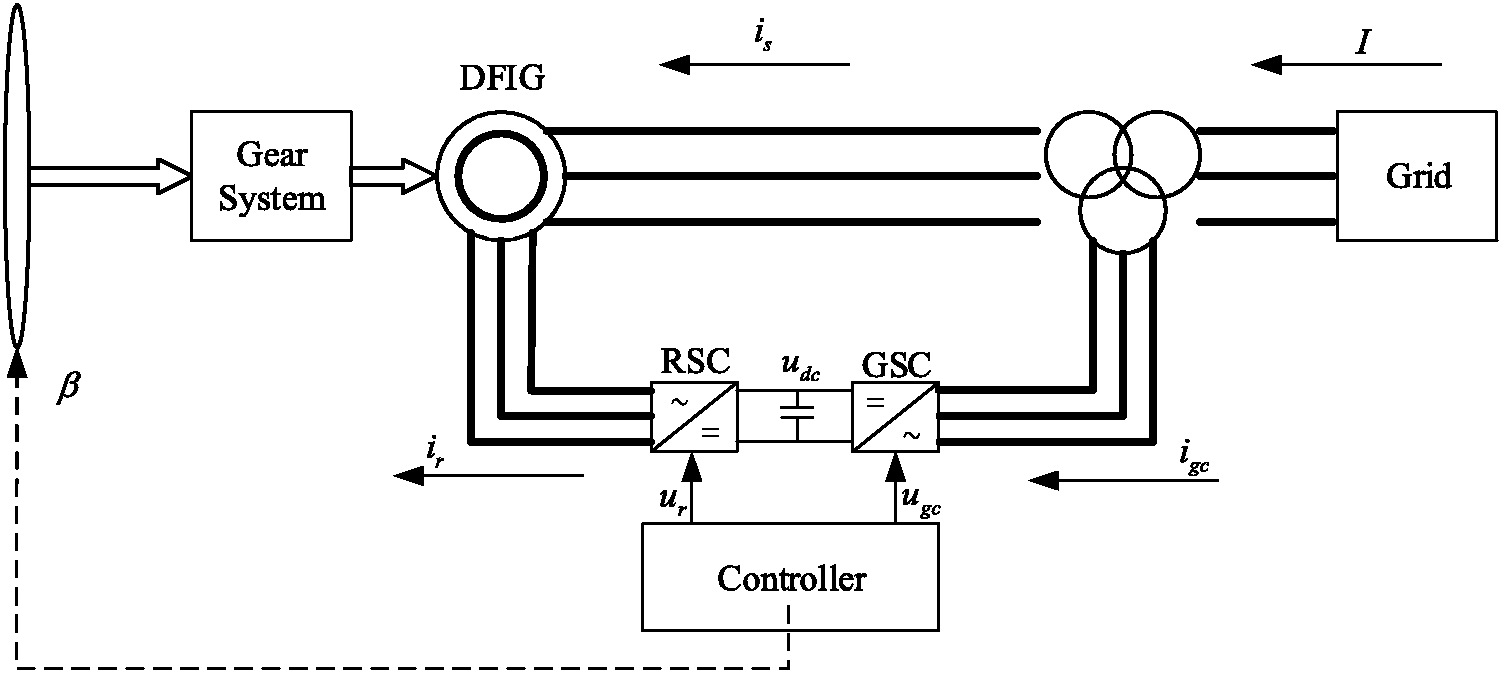
When equations (28) to (32) are substituted into Lagrange’s equation, as shown in equation (33), the vibration differential equations can be written as follows
Results and discussion
Dynamic response of the system with time-varying wind load
Based on the relevant parameters of the wind turbine as shown in Tables 1 and 2, the wind speed time-history and the external load are obtained. According to the transmission ratio, loads of the high-speed level of gear system are calculated. According to the AR model, the pulsating wind speed within limits of 200 sounds is obtained, as shown in Figure 6(a). In the paper, we capture the wind speed in 10 s in Figure 6(b). The wind wheel input torque is obtained by the equation in the External excitation of the system section. It is easy for the input and output torque of the system to calculate by conversion of transmission ratio as shown in Figure 6(c) and (d).
Parameters of the gear system of wind turbine.
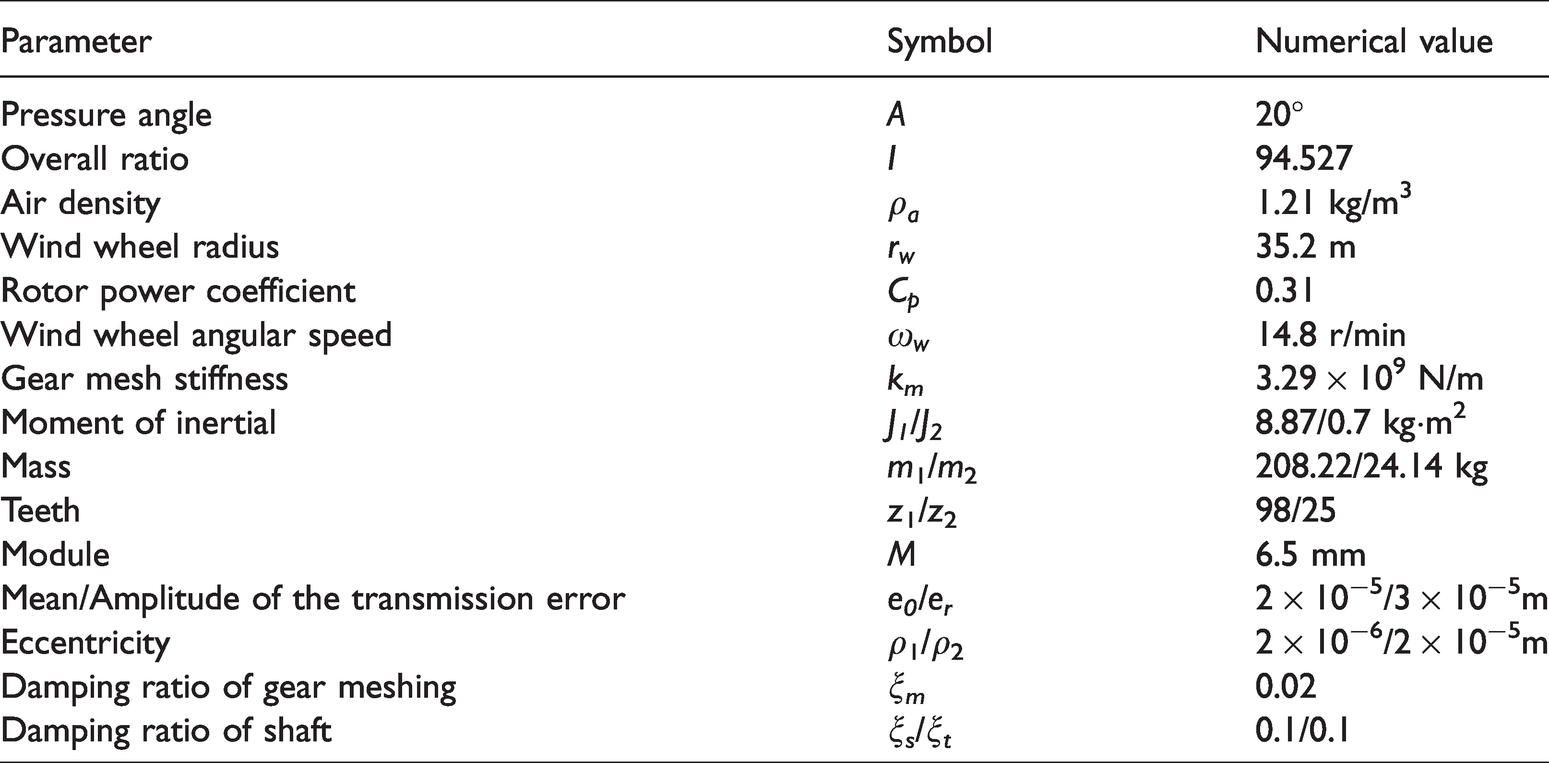
Model parameters of the bearing.
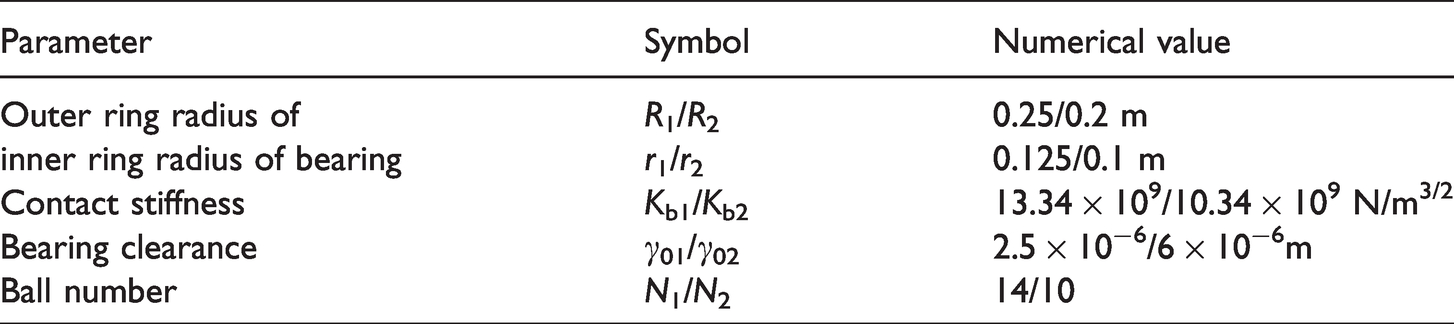
The simulated wind speed of the AR model and the input and output torque.
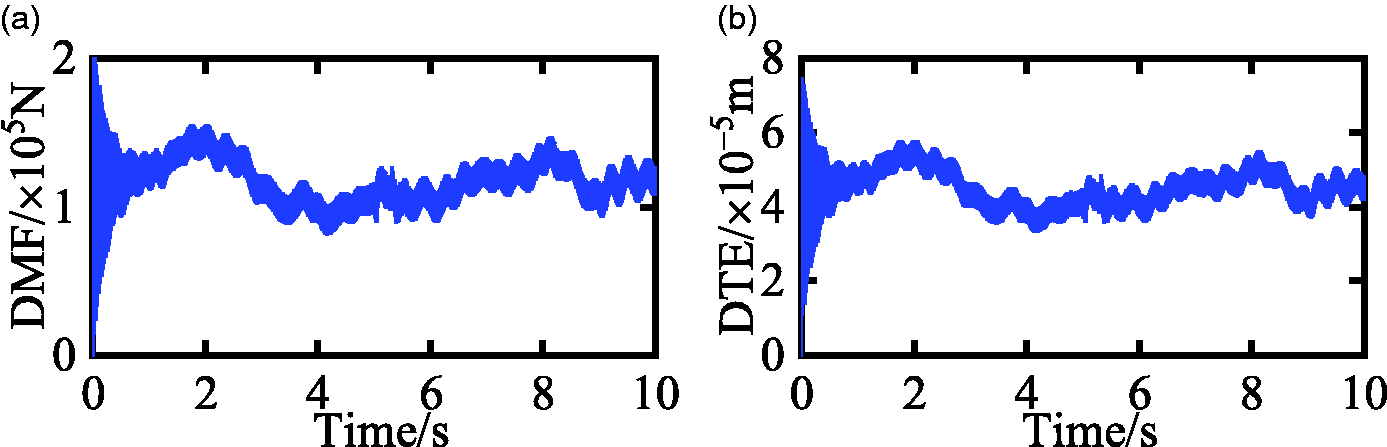
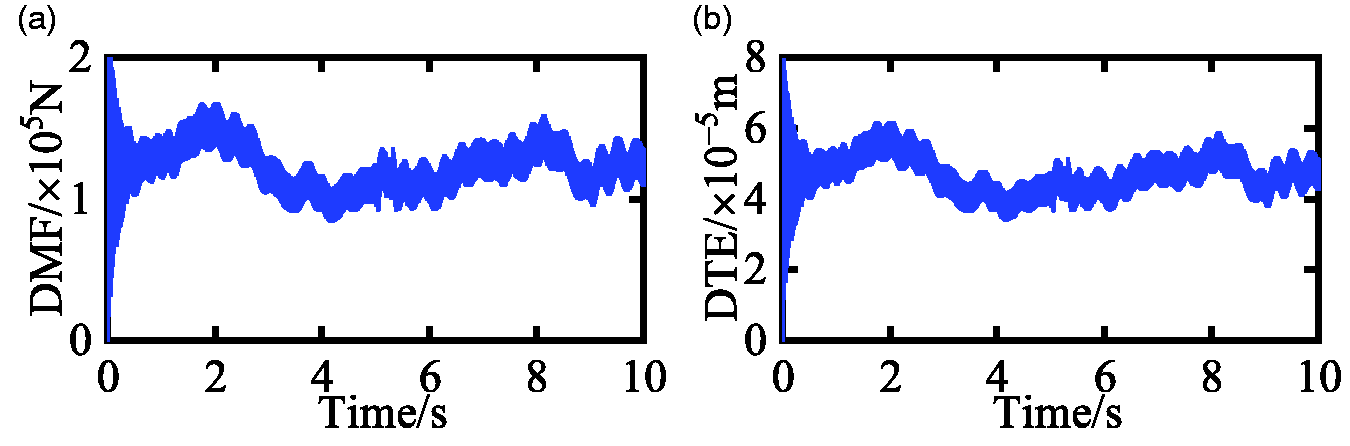
To explore the effect of the friction coefficient on the gear transmission system, the friction coefficient is controlled as a parameter. It can be known from the above analysis that the high-speed-level gear transmission system of the wind turbine is a multi-degree nonlinear dynamic model. Fourth-order Runge-Kutta is used to solve the vibration differential equations of the model. Dynamic mesh force (DMF) and dynamic transmission error are attained as shown in Figures 7 to 9. It is seen that the fluctuation trend of DMF and DTE is similar to wind speed’s fluctuation trend. The response is analyzed at the different friction coefficients of μ = 0, μ = 0.1 and μ = 0.6. It is clearly seen that the vibration amplitude of DMF and DTE increases with the increase of friction coefficient μ. Therefore, the friction coefficient μ makes their amplitude booming.
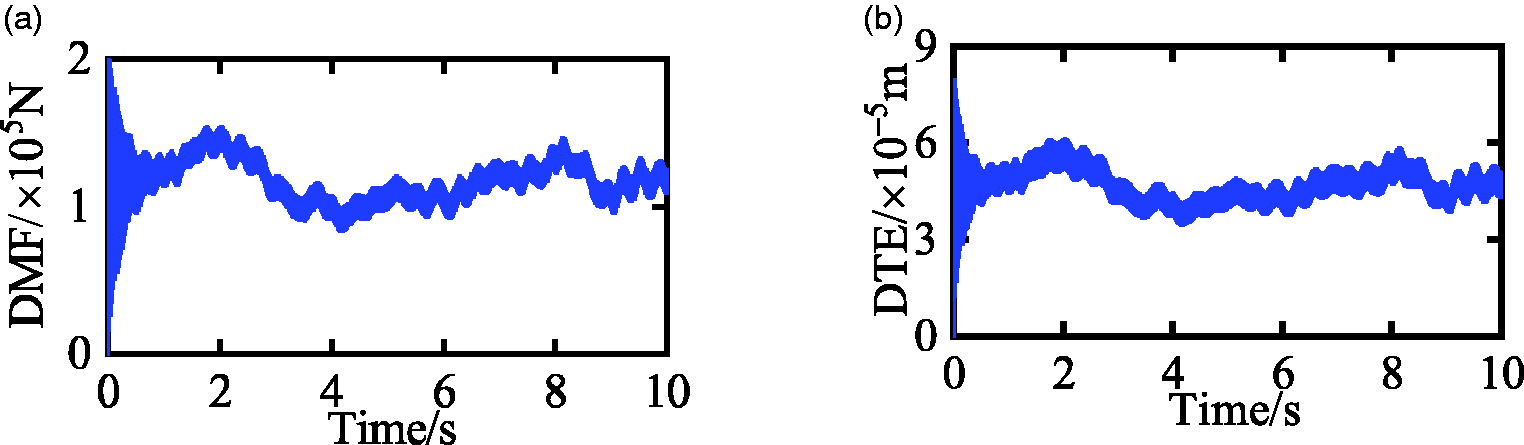
The time-domain waveform (μ = 0).
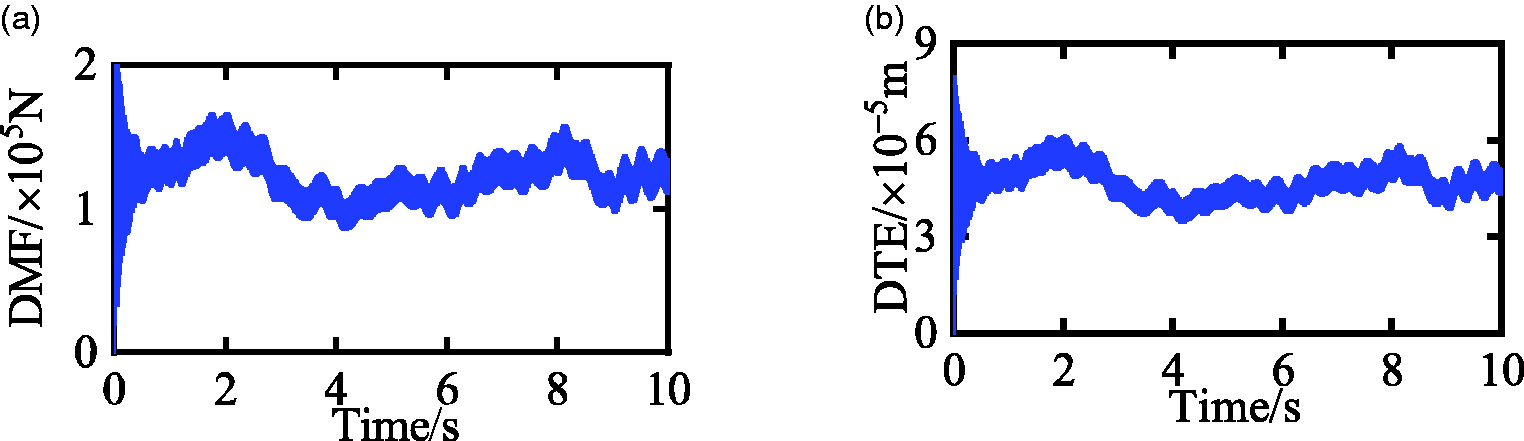
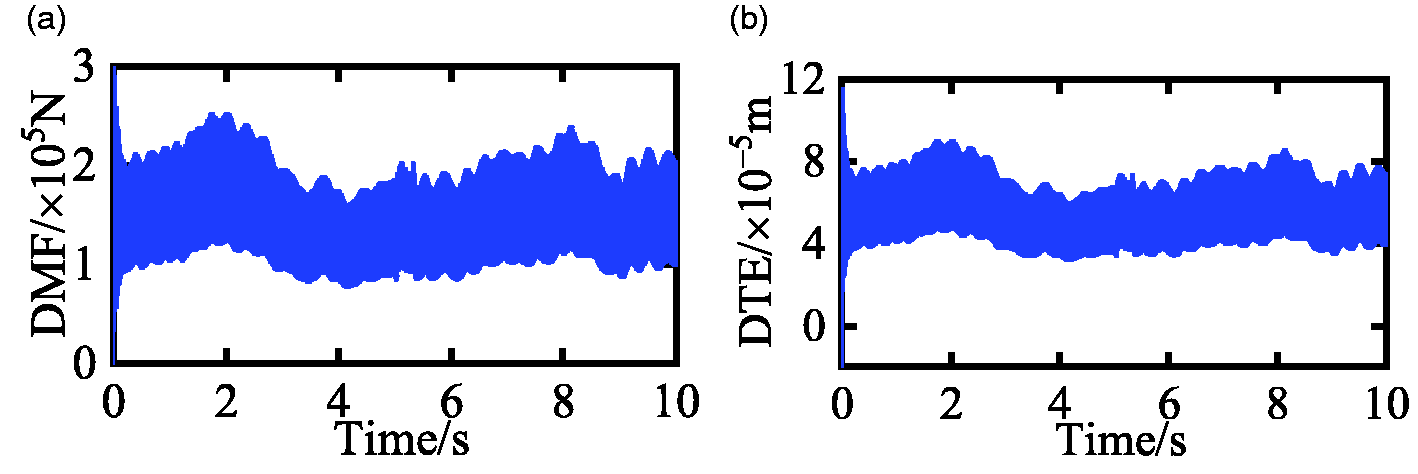
The time-domain waveform (μ = 0.1).
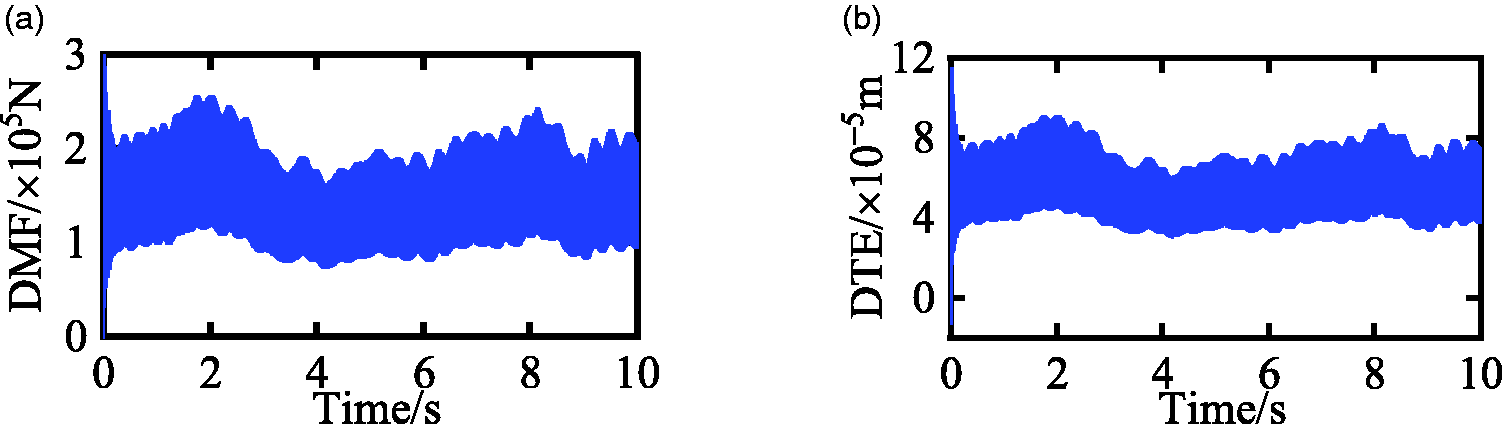
The time-domain waveform (μ = 0.6).
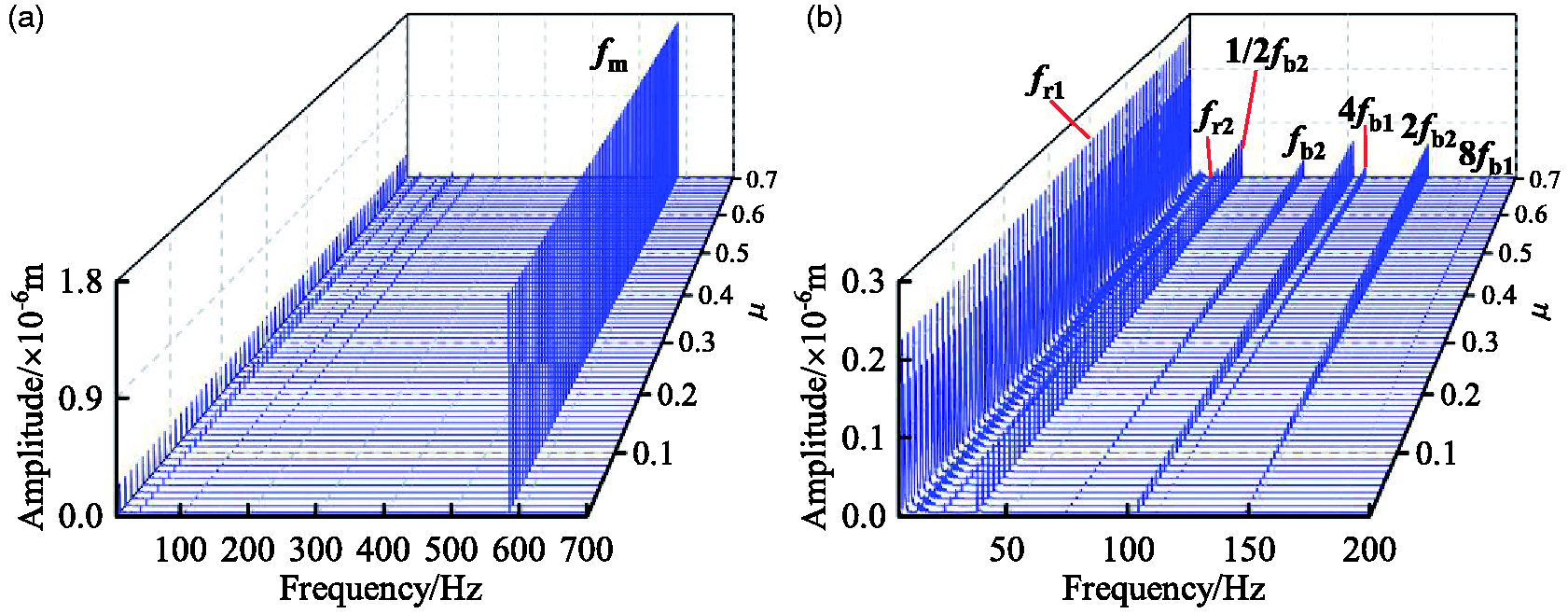
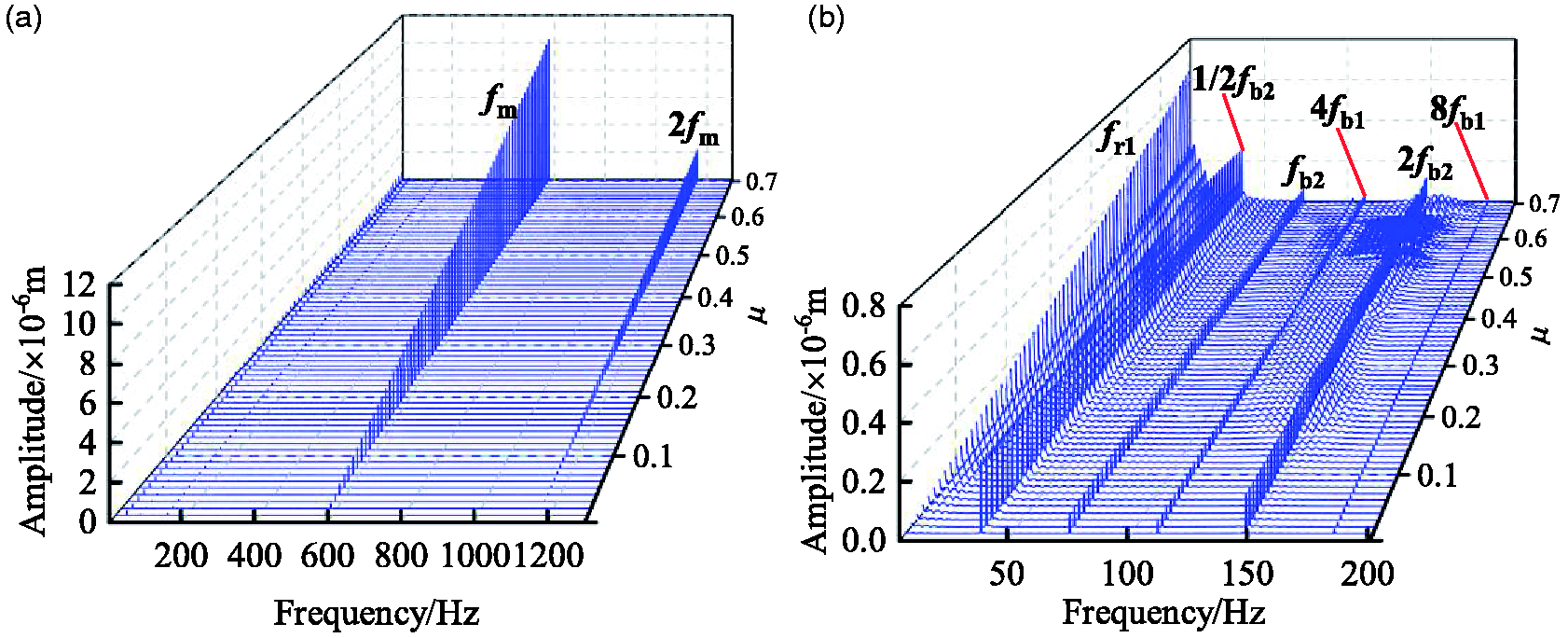
3-D frequency spectra are shown in Figures 10 to 13. The 3-D frequency spectra in x1 direction are depicted in Figure 10. With increase of friction coefficient, the mesh frequency fm (fm=n1z1/60 = 583Hz) increases as shown in Figure 10(a). In the spectrum, the amplitude of mesh frequency is the highest. The others are marked in Figure 10(b). The rotational frequency fr1(fr1=n1/60 = 5.95 Hz) also increased with the increase of friction coefficient. When the friction coefficient increases, the amplitude of variable stiffness frequency 4fb1(fb1=n1r1N1/60(R1+r1) =27.8 Hz) and its frequency multiplication 8fb1 is not changed. With increase of friction coefficient, the amplitude of variable stiffness frequency fb2 and its frequency multiplication 2fb2(fb2=n2r2N2/60(R1+r1) =74Hz) is not changed. When the friction coefficient increases, the frequency amplitude 1/2fb2 exists a slight fluctuation.
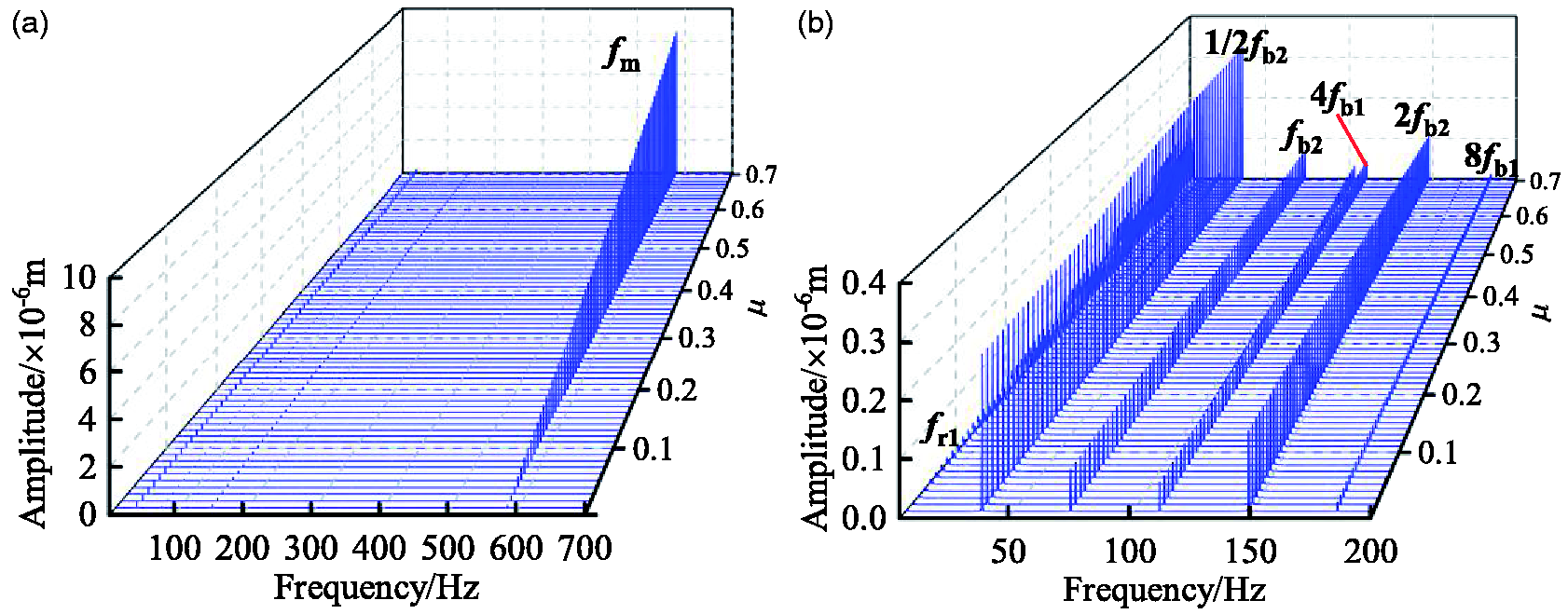
The 3-D frequency spectra in x1 direction: (a) the 3-D frequency spectrum within the limits of 0–700 Hz, (b) the local image within the limits of 0–200 Hz.
The 3-D frequency spectra in y1 direction are depicted in Figure 11. It is clearly seen that the frequency component is more complicated than in x1 direction. The variable trend of frequency is also different. When the friction coefficient increases, the mesh frequency fm and rotational frequency fr1 are not changed. The mesh frequency is the largest, and the rotational frequency fr1 is the second largest. It can be seen that fr2 appears in the frequency spectrum in y1 direction. 4fb1, 8fb1, fb2, 2fb2 amplitude is gradually increasing with the increase of the friction coefficient. The fluctuation of component frequency is exacerbated. The variable trend is first increases, then slowly decreases and finally becomes stable. It illustrates the phenomenon that the same frequency component has different variable laws in a different direction on the gear.
The 3-D frequency spectra in y1 direction, (a) the 3-D frequency spectrum within the limits of 0–700 Hz, (b) the local image within the limits of 0–200 Hz.
The 3-D frequency spectra of the bearing in xb1 direction are shown in Figure 12. It is clearly seen that the mesh frequency fm and the rotational frequency fr1 are increased little by little with the increase of the friction coefficient. The mesh frequency is not the largest all the while. Approximately, the amplitude of mesh frequency is the largest within the limits of
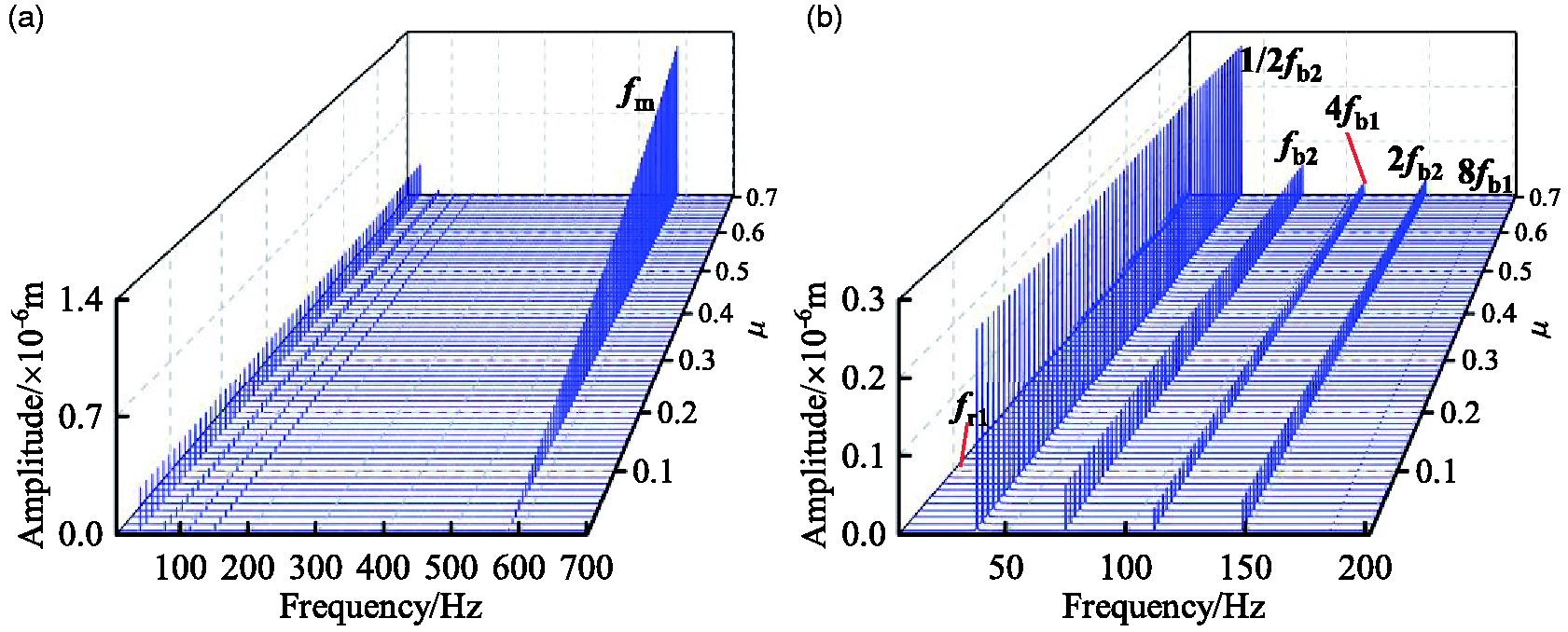
The 3-D frequency spectra in xb1 direction: (a) the 3-D frequency spectrum within the limits of 0–700 Hz, (b) the local image within the limits of 0–200 Hz.
The 3-D frequency spectra of the bearing in yb1 direction are shown in Figure 13. The mesh frequency is the largest all the while. But the second-largest is not fixed. Approximately, the rotational frequency fr1 is the second largest at µ<3.5. When µ is greater than 3.5, the frequency 1/2fb2 is the second largest. The mesh frequency fm and rotational frequency fr1 were not changed by the friction coefficient. With the increase of µ, the amplitude increases, including fb2, 2fb2, 4fb1, 8fb1 and 1/2fb2.
The 3-D frequency spectra in yb1 direction: (a) the 3-D frequency spectrum within the limits of 0–700 Hz, (b) the local image within the limits of 0–200 Hz.
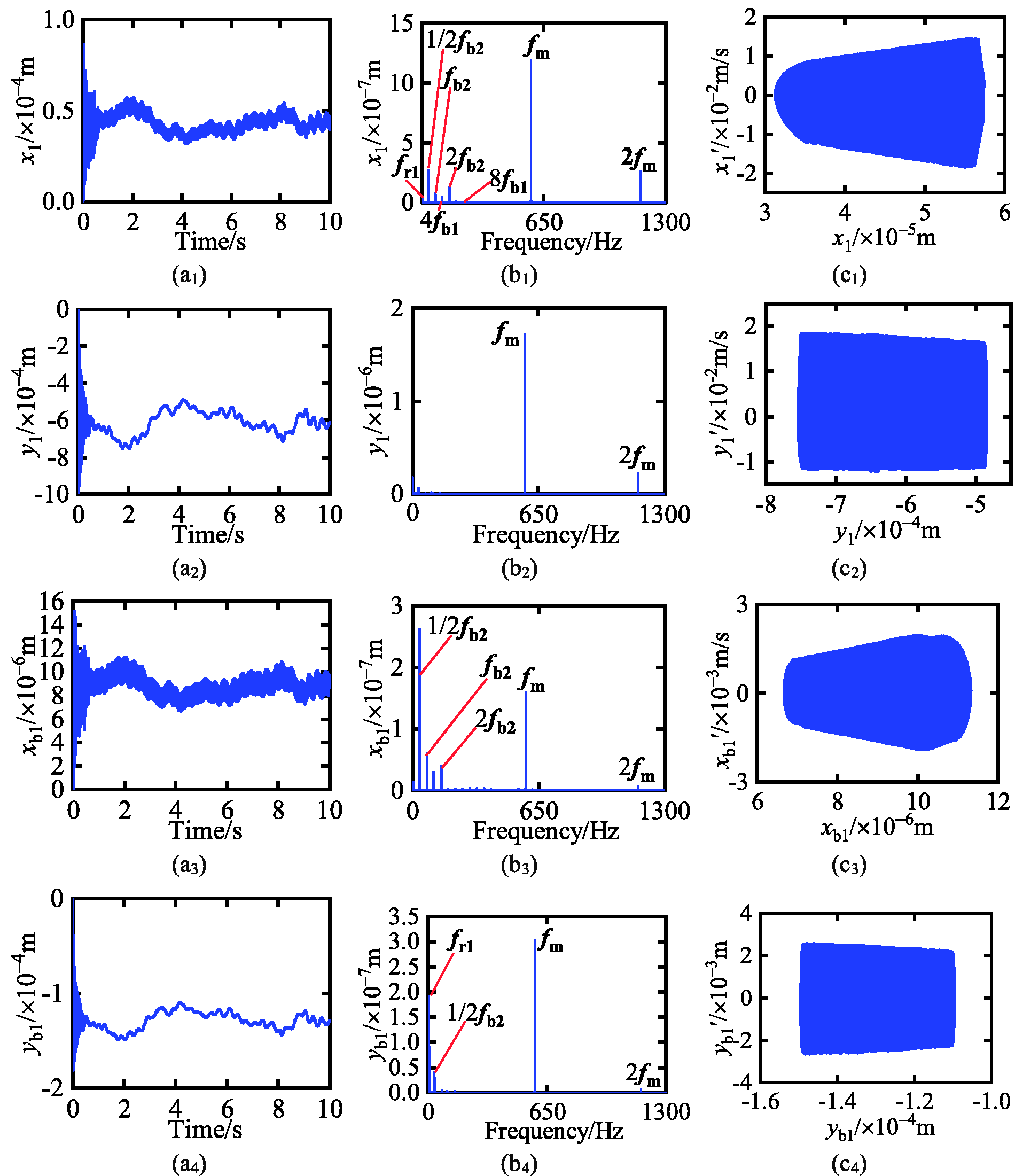
The vibration response of the gear transmission system is analyzed under different conditions, including three friction coefficients of μ = 0, μ = 0.1 and μ = 0.6. The results are shown in Figures 14 to 16. The vibration response at μ = 0 is depicted in Figure 14. When the friction force does not exist on the gear transmission system (µ=0), the variation trend of displacement in x1 direction is not matched with the wind speed. But y1 direction presents a reverse relation. The amplitude of mesh frequency is slight. The frequency 1/2fb2 is the largest in x direction, including x1 and xb1, as depicted in Figure 14(b1) and (b3). The mesh frequency fm is the largest in y1 and yb1 direction as shown in Figure 14(b2) and (b4).
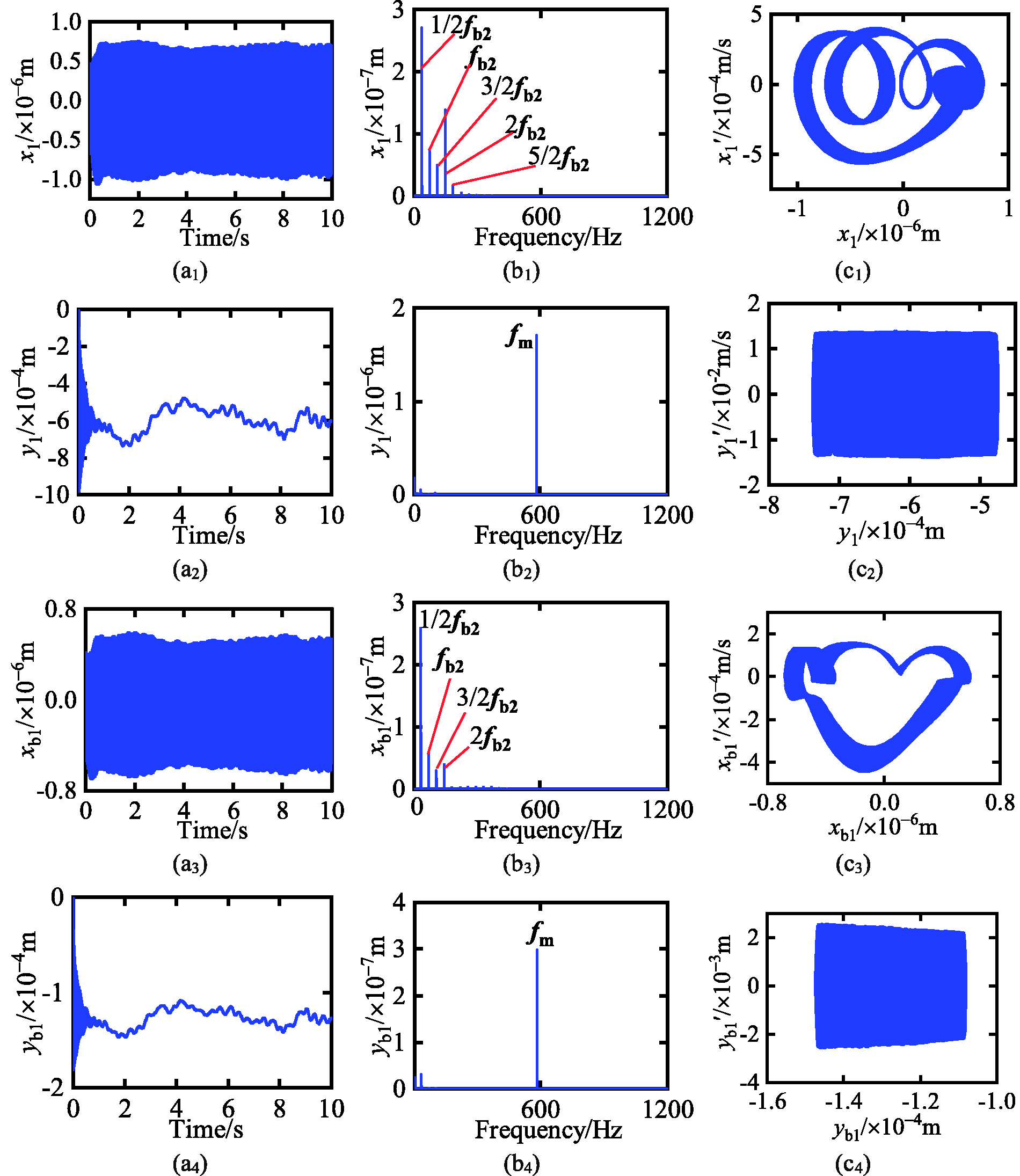
The response of the gear system (μ = 0): a i represents time domain waveform, b i represents frequency spectrum, c i represents phase map (i = 1, 2, 3, 4). i = 1 in x1 direction, i = 2 in y1 direction, i = 3 in xb1 direction, i = 4 in yb1 direction.
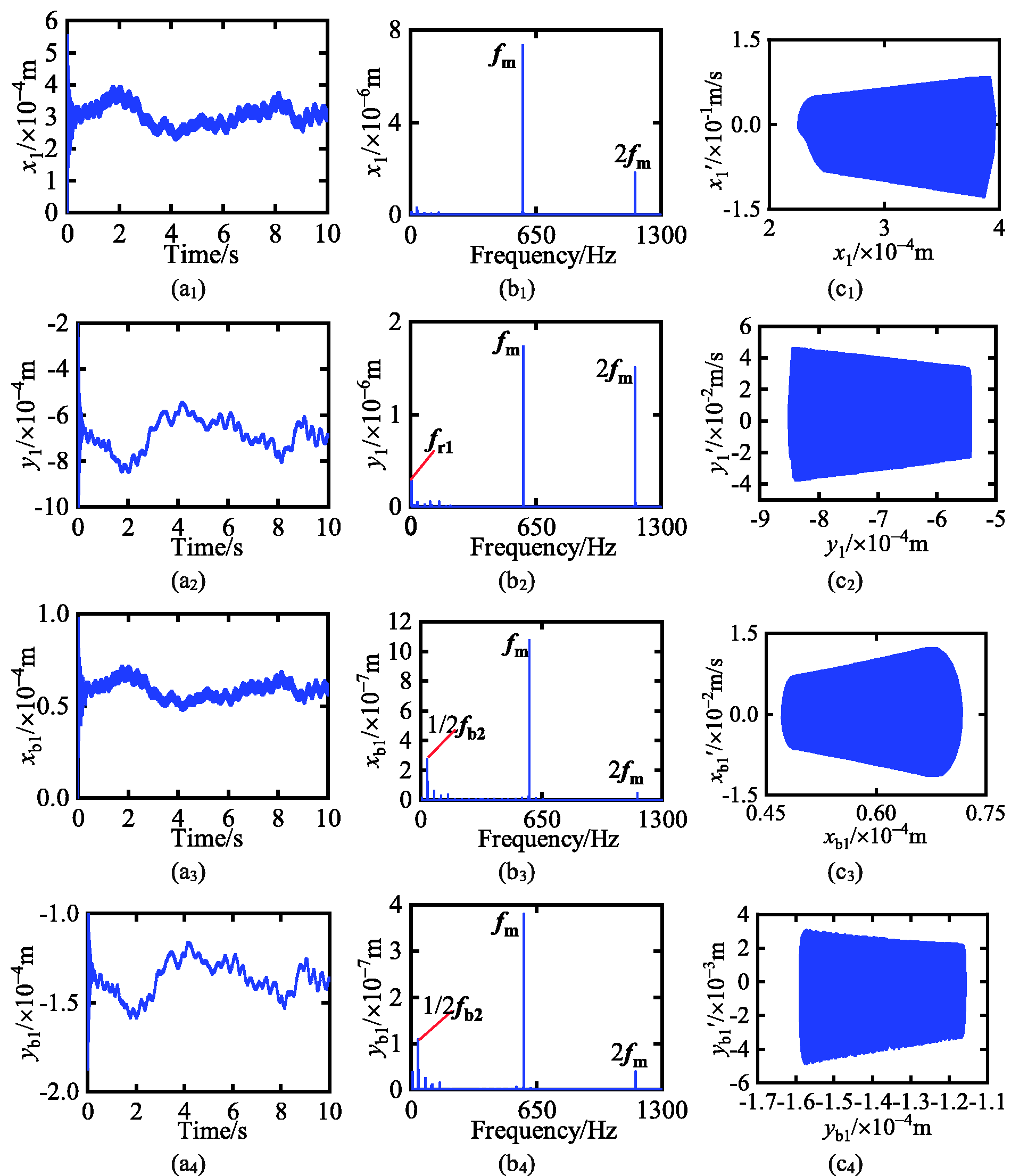
In Figure 15, the vibration response at (µ=0.1) is shown. When the friction force exists, the variable trend of the displacement in x direction presents a positive relationship or called the same variation as the wind load within the limits of 10 s as shown in Figure 6(b). Reversely, y direction trend is a reverse relation with the wind speed. The mesh frequency again becomes the largest frequency in x1, y1, yb1. However, the frequency 1/2fb2 is the largest in xb1. The phenomenon can be made mention of Figure 12(a) interpretation. Approximately, the displacement amplitude of x1 is a hundredfold increase and xb1 is a tenfold increase than no friction. Thereupon, the phase diagram trajectory becomes wide. The phase diagram trajectory is split. It is clearly seen that the trajectory comprises several closed regular elliptical rings. It can be deduced that the gear system motion state is a stable periodic motion.
The response of the gear system (μ = 0.1): a i represents time domain waveform, b i represents frequency spectrum, c i represent phase map (i = 1, 2, 3, 4). i = 1 in x1 direction, i = 2 in y1 direction, i = 3 in xb1 direction, i = 4 in yb1 direction.
When the friction coefficient further increases μ = 0.6, the variable trend of displacement amplitude becomes steeper than before in Figure 16(a i ). The mesh frequency fm and its frequency multiplication 2 fm are bigger than before in x1 and y1 in Figure 16(b1) and (b2).
The response of the gear system (μ = 0.6): a i represents time domain waveform, b i represents frequency spectrum, c i represent phase map (i = 1, 2, 3, 4). i = 1 in x1 direction, i = 2 in y1 direction, i = 3 in xb1 direction, i = 4 in yb1 direction.
Dynamic response of the system with electromagnetic torque disturbance
On the basis of the time-varying wind load mentioned in the Dynamic response of the system with time-varying wind load section, the electromagnetic torque disturbance can be solved by the DFIG model of the wind turbine. The parameters of DFIG are shown in Table 3. If a small drop in the voltage grid appears, the output torque end of the gear transmission system will produce a fluctuation called electromagnetic torque disturbance. This fluctuation can be calculated by the Matlab/Simulink model of DFIG. The voltage drop starts at 5 s and lasts for 200 ms. If the voltage grid drops to 90% of the current-voltage, the output torque Tg is shown in Figure 17(b).
Parameter of DFIG power system.

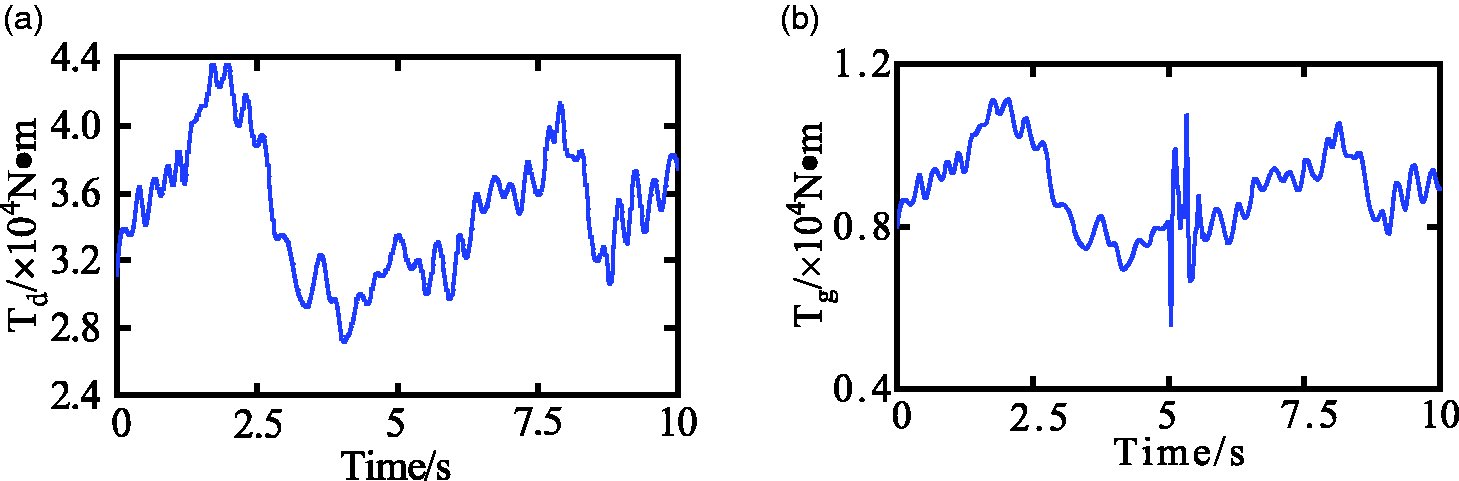
The input and output torque.
On the basis of the Dynamic response of the system with time-varying wind load section, the input torque Td remains unchanged as shown in Figure17(a). After substituting equation (34), the differential equation is solved by fourth-order Runge-Kutta. Considering the time-varying wind load and electromagnetic torque disturbance, the dynamic response of the system can be given. DMF and DTE of the system are respectively shown in Figures 18 to 20 with different friction coefficient μ. According to the figures, there is the same trend fluctuation as Tg. With increase of friction coefficient, the electromagnetic torque disturbance is gradually covered up by the influence of the friction coefficient.
The time-domain waveform (μ = 0).
The time-domain waveform (μ = 0.1).
The time-domain waveform (μ = 0.6).
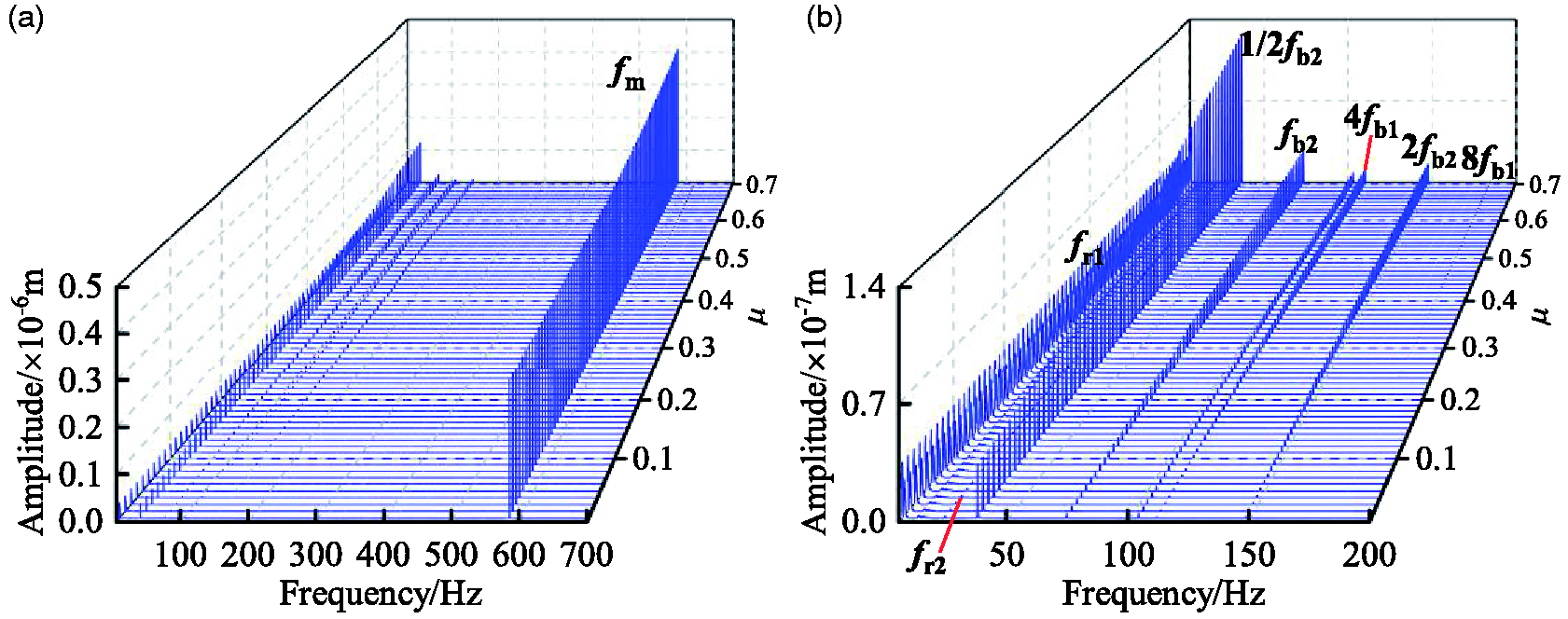
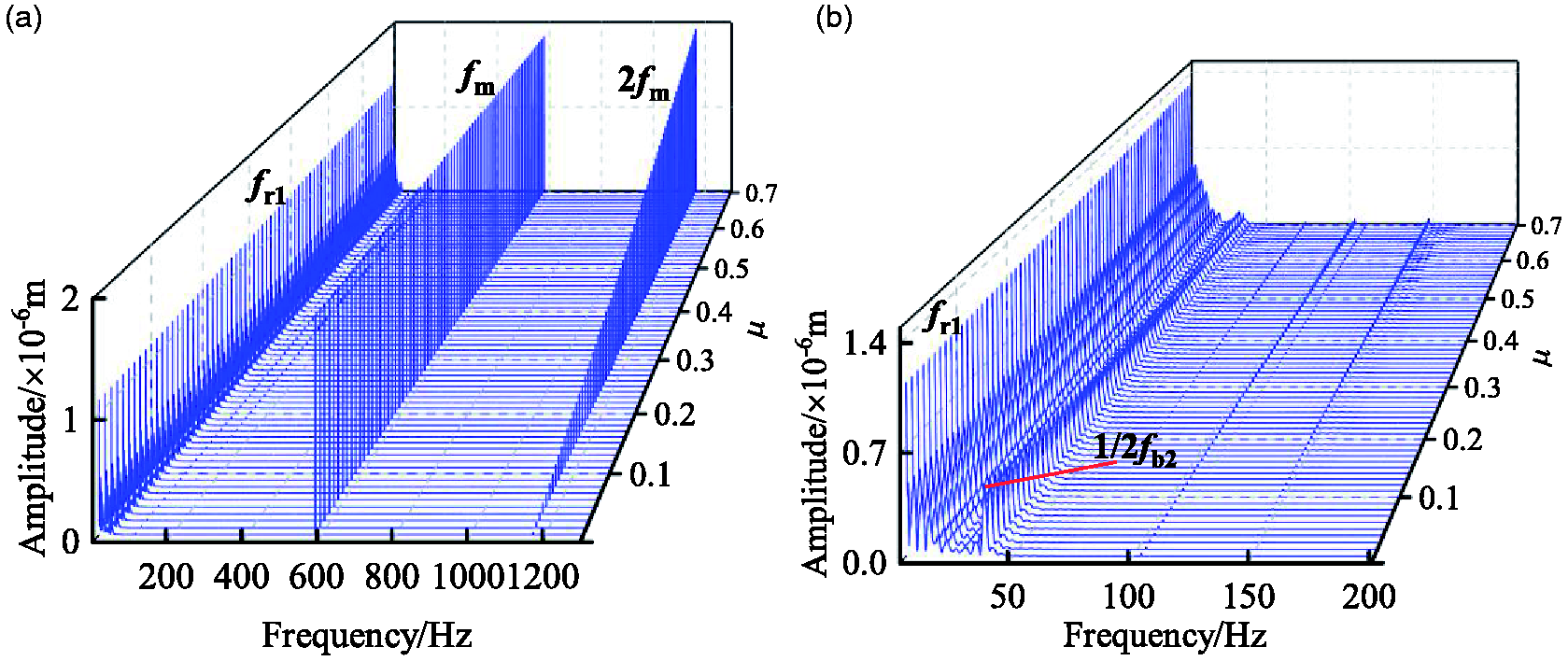
Three-dimensional frequency spectra of gear are described in Figures 21 and 22. Compared with Figure 10, the amplitude variation of frequency constituent fm and 2 fm is the same. However, the amplitude of the whole becomes larger due to electromagnetic torque disturbance. The change is the most pronounced in the low frequency. The change is the most pronounced in the low frequency. Frequency doubling appears near fr1 and the amplitude of fr1 is bigger than in Figure 10 with increase of friction coefficient. In the vicinity of the low-frequency components, there are different degrees of sidebands. The sidebands of 2fb2 are the most obvious within the limits of
The 3-D frequency spectra in x1 direction: (a) the 3-D frequency spectrum within the limits of 0–1300 Hz, (b) the local image within the limits of 0–200 Hz.
The 3-D frequency spectra in y1 direction: (a) the 3-D frequency spectrum within the limits of 0–1300 Hz, (b) the local image within the limits of 0–200 Hz.
Compared with Figure 11, the amplitude variation of frequency constituent fm and 2 fm is the same. But the low-frequency parts are entirely different. The amplitude variation trend of 1/2fb2 goes from constant to decrease. The effect of electromagnetic torque disturbance on the y1 direction low-frequency spectrum has a greater influence than in the x1 direction.
Conclusions
Based on the gear-rotor-bearing transmission system model, in this study the effect of the time-varying wind load and the electromagnetic torque disturbance has been explored. The vibration characteristics and frequency laws are shown in the following:
The vibration displacement variation trend of the gear and bearing is closely related to the wind load variation trend. The gear and bearing’s vibration displacement in the horizontal direction (x) is similar to the wind load trend. But it is reverse in a vertical direction (y). In the domain frequency without electromagnetic torque disturbance, the frequency component in y direction is more abundant than in the x direction. The law of frequency amplitude variation is different with the increase of the friction coefficient. The mesh frequency is not always the largest frequency amplitude in the spectrum of bearing. The low-frequency component in all directions can be seriously influenced by the friction.
When the output end has electromagnetic torque disturbance, the amplitude of low-frequency parts is bigger than without electromagnetic torque disturbance. It can be seen that sidebands exist near low-frequency parts. When the friction coefficient achieves some value, sidebands are more serious in spectra. This study has found that due to the electromagnetic torque disturbance, frequency fault characteristics are almost certainly present in the low-frequency portion. The study contributes to our deep understanding of the design and diagnosis of the gear system of the wind turbine.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project is funded by the Natural Science Foundation of China (grant no. 51675350), and by the Shenyang Shuangbai Project (Transformation of major achievements) (grant no. Z17-5–067).