
Abstract
In this study, the critical conditions for generating chaos in a Duffing oscillator with nonlinear damping and fractional derivative are investigated. The Melnikov function of the Duffing oscillator is established based on Melnikov theory. The necessary analytical conditions and critical value curves of chaotic motion in the sense of Smale horseshoe are obtained. The numerical solutions of chaotic motion, including time history diagram, frequency spectrum diagram, phase diagram, and Poincare map, are studied. The correctness of the analytical solution is verified through a comparison of numerical and analytical calculations. The effects of linear and nonlinear parameters on chaotic motion are also analyzed. These results are relevant to the study of system dynamics.
Introduction
Nonlinear damping systems are widely used in natural science and engineering technology fields, such as in constructing wire ropes, wire meshes, metal rubber nonlinear dry friction dampers, and other nonlinear dry friction dampers, and in addressing gaps and dead zone characteristics in a system structure. These systems follow Newton’s law1–4 and nonlinear viscous damping. Therefore, related systems exhibit jumping, bifurcation, and chaos. The idea of understanding nonlinear equations emerged in the 11th century, and numerous methods have been introduced to solve such equations. The ancient ancestral technique is the original method of solving nonlinear equations. He 5 restudied the algorithm of the ancient Chinese ancestral method to solve a nonlinear equation system and introduced the frequency method derived from the ancient mathematical method. Perturbation is one of the effective methods of solving nonlinear equations. Almost all perturbation theories rely on small parameter assumptions. However, the approximate solution obtained by the traditional perturbation method is influenced by parameters and long-term items. To obtain a solution that is unaffected by parameters, He 6 proposed a new perturbation method for the linearization and correction of nonlinear equations. Different from the traditional perturbation method, the new perturbation method assumes that the approximate solution can be expressed as a series of small parameters. The linearization and correction of nonlinear equations aim to linearize the equations, find the solutions of the linearized equations, and correct these solutions. The obtained approximate solution is therefore unaffected by the parameters in the equation. Furthermore, to avoid the appearance of long-term items, He 7 proposed a variational iterative algorithm for solving nonlinear equations. In this method, the initial approximate solution is given to the equation as a trial function with an undetermined function. An iterative formula is then constructed using the Laplace multiplier method. Latvian multipliers can be best determined by the concept of variation. The application of this method avoids the disadvantage of the traditional perturbation method.
Nonlinear oscillators exist widely in nature. Current effective methods of studying nonlinear oscillators include variational and Hamiltonian methods. The research process is described as establishing the variational formula of the nonlinear oscillator and then obtaining the energy form of the nonlinear oscillator. In this form, the influence of parameters is analyzed. This method is commonly used in civil engineering and construction projects or in the initial conditions of a partial differential equation with boundary conditions to describe the nonlinear oscillator, which requires numerous variables. He 8 proposed the generalized variational principle and the parameterized generalized variational principle for the analysis of large deformation of a cylinder by using the semi-inverse method. The trial function is composed of an energy-like integral with unknown functions integrated step by step. This theory provides a simple and rigorous tool to construct the variational principle of shell plate buckling. Unsteady pipe flow is often encountered in industries; controlling the unsteady compressible flow by using the numerical solution of hyperbolic partial differential equations is still confined to the differential difference method based on weighted residuals and the finite element method. He9,10 deduced the generalized variational principle of one-dimensional unsteady compressible flow on a specific plane by establishing the semi-inverse method of the generalized variational principle and two types of variational principles; thus, the finite element method based on variation or other direct variation method has many advantages.
Three-dimensional unsteady potential flow can also be used in the variational principle. He 11 proposed using the semi-inverse method to derive the variational formula from control equations, construct a trial function, and obtain new variational principles. The semi-inverse method is of great guiding importance to the theory of variation. It can replace Lagrange multiplication to establish the generalized variational principle. The semi-inverse method can be used to establish the variational principles of fractals and fractional calculus. In elasticity, variational theory can help us deeply understand the physical meaning of the interaction between variables, optimize the numerical algorithm, and provide possible solution structures. The variational method has also been widely applied to deal with nonlinear oscillators in other fields.12,13 The Duffing oscillator is a typical nonlinear oscillator. Its variational formula is established using the variational principle. The energy form of the nonlinear oscillator is obtained, and the homostatic orbit formed by the coincidence of stable manifold and unstable manifold is easily obtained to satisfy the differential equation. The Duffing oscillator is a simple mathematical model to describe resonance phenomena, conciliation vibrations, subharmonic vibrations, proposed periodic vibrations, general periodic vibrations, singular attractors, and chaotic phenomena (or random processes). He 14 proposed the simplest method to solve the Duffing equation on the basis of previous research; this method is particularly fast and relatively accurate in estimating the frequency of nonlinear conservative oscillators.
In the 1970s, researchers found that fractal geometry, the power-law phenomenon, the memory process, and other related phenomena have a close relationship with fractional calculus. Fractional calculus is a good description and characterization method, and research on it has gradually peaked.15–17 Fractional calculus has obtained different results in recent decades; its practicality in textile, 18 electricity, 19 and other fields has been widely studied. Fractional calculus theory has gradually progressed and has developed into a hot topic. He 20 proposed the use of two scales instead of the fractal dimension to manage discontinuity, thereby increasing the understanding of the definition of fractional derivative. Different approaches to observation yield different results. Most practical problems can be solved with two scales. In this theory, two scales instead of the fractal dimension are proposed to manage discontinuity. Fractal theory indicates that no self-similar model can be found in any practical application, whereas double-scale theory observes that each problem has two scales, and a large scale is an approximately continuous problem. In this manner, classical calculus can be fully applied, and the effect of a porous structure on material properties can be ignored. He21,22 also posited that two-scale transformation can transform fractional calculus into traditional calculus. Two different scales are used to observe the same phenomenon. One scale is typically used in continuum mechanics. The other scale can reveal the truth beyond the continuum hypothesis. The control equation is established using fractal theory. This work expounds on the basic properties of fractal calculus and the relationship between fractal calculus and traditional calculus by using double-scale transformation.
Three-dimensional problems can be approximated by two-dimensional or one-dimensional cases, but some information will be lost. A two-scale mathematical model is needed to avoid the error caused by the dimension reduction method. One scale is established in the case where traditional calculus works, and the other scale is used to prevent the information loss of a continuous hypothesis. Thus, simple fractional or fractal calculus must be used. This theory allows fractional calculus to be understood from different angles, which makes fractional calculus improve further.
He 23 also provided an analytical method for a class of fourth-order nonlinear integral boundary value problems with fractal derivatives, which enhances our understanding of the definition of fractional calculus. Shen and Yang24–26 studied the dynamic phenomena of the fractional Duffing oscillator, including joint resonance, combined resonance, and superharmonic resonance of superharmonic and subharmonic vibrations, and analyzed the influence of fractional parameters on the system. However, the chaos of the Duffing oscillator with a fractional order was not studied. Liu et al.27,28 proposed a numerical method of the global dynamics of a nonlinear order system, namely, the extended generalized mapping method, to study chaos. However, when the nonlinear system contains a nonlinear damping term, it is not considered. Other scholars29,30 analyzed the chaos synchronization behavior of the improved van der Pol Duffing system and revealed the influence of the fractional order on chaos synchronization control. To date, the chaos of the fractional nonlinear oscillator with nonlinear damping has not been studied. The fractional calculus constitutive relation31,32 can describe the mechanical behavior of a large class of polymer damping materials33,34 in a wide frequency range with only a few parameters.
The Melnikov method is one of the most effective approaches to study chaos. It has advantages in analyzing the chaos threshold of multi-parameter nonlinear systems.Qin and Xie used the Melnikov method to study the critical value of chaos in a single-degree-of-freedom dry friction oscillator system with linear damping and periodic excitation. 35 Zhu et al. used Melnikov’s theory to deduce the condition of chaotic motion in a nonlinear dynamic system under bounded noise and harmonic excitation. 36 However, nonlinear dry friction dampers and systems with nonlinear damping, 37 such as gap and dead zone characteristics in a system structure, still lack research. Therefore, an oscillator model with nonlinear viscous damping fractional order should be used to describe them. In nonlinear dynamic phenomena, chaos is a unique dynamic behavior that is aperiodic and depends on the original conditions; its influence on the mechanical system cannot be ignored. The critical value of chaos is important to the study of chaos control. The critical value of chaos is the boundary between the periodic motion and chaotic motion of the nonlinear dynamic system, that is, the confusion threshold.
On the basis of the Melnikov method, this study analyzes the necessary conditions for the chaotic characteristics of the Duffing oscillator with nonlinear damping under harmonic excitation. The Melnikov function of the Duffing oscillator with a fractional derivative with nonlinear damping is established. The necessary conditions for the analysis of chaotic motion in the sense of the Smale horseshoe and the critical value curve are obtained. The time history diagram, spectrum diagram, phase diagram, and Poincare map of the numerical solution are also studied. The correctness of the analytical solution is verified by comparing the numerical calculation with the analytical calculation. The influence of each parameter on chaotic motion is likewise analyzed.
Chaos conditions for the fractional Duffing oscillator with nonlinear damping
The Duffing oscillator is a typical research object in nonlinear dynamics. The fractional derivative Duffing oscillator with nonlinear damping under harmonic excitation can be described as


The order is

Homoclinic orbit of the fractional Duffing oscillator with nonlinear damping
When

Equation (5) is converted into a state equation

The system is a Hamiltonian system, and the Hamiltonian function satisfies

Here,

Let
The phase plan of the undisturbed system according to
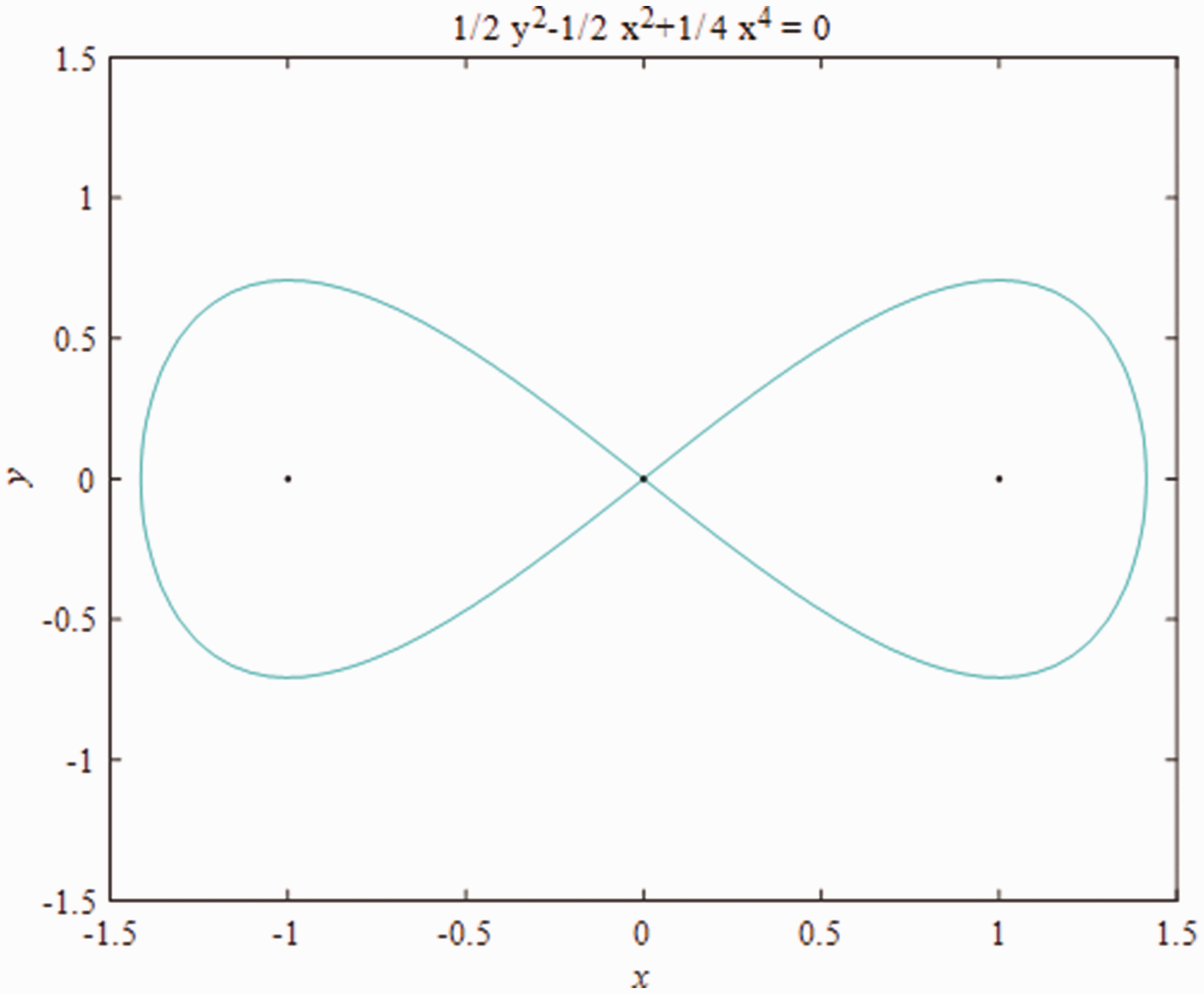
Phase plan of the undisturbed system.
When the Hamiltonian system is equal to zero, two homoclinic orbitals connect the saddle points. The positions of the saddle points and the two centers are shown in Figure 1. The saddle point is unstable, whereas the center point is stable. Therefore, the homoclinic orbit composed of stable manifold and unstable manifold of hyperbolic saddle point (0, 0) satisfies the differential equation

Suppose that when

The definite integral is calculated and sorted out to obtain

The parameter form of the homoclinic orbit corresponding to the undisturbed system

Necessary conditions for the chaos of the fractional Duffing oscillator with nonlinear damping
Melnikov’s theory is an analytical method proposed by Melnikov to judge the existence of cross-sectional homoclinic points in a plane integral system subject to small periodic perturbations. Melnikov’s theory was first used to prove the existence of transversal or heteroclinic orbits and has since been used in many studies. Holmes first applied it to the study of the periodic-driven Duffing oscillator. The Melnikov function is defined as

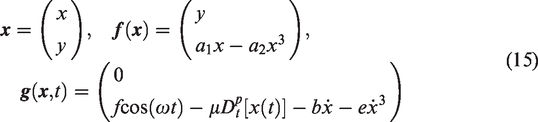
Equation (1) is transformed into an equation of state form

By rewriting the form of equation (1) with
Substituting equation (15) generates the following


Substituting equations (12), (16), and (17) with equation (13) generates the following
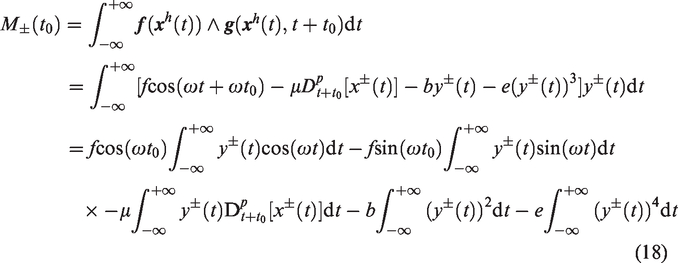
The integral of equation (18) is divided into five parts as follows
Substituting

According to Melnikov’s theory, when

The integral
Given that
We adopt the method of Laplace transform to solve a fractional differential equation. If the initial value of the Laplace transform is equal to the initial value of integration under the fractional derivative of Caputo, then it will be easy to calculate. If the initial value is not zero, we use the Caputo definition to calculate the fractional differential equation. The specific calculation process is described below.
Laplace transform is required on both sides of the fractional derivative equation of Caputo. Then, according to the properties of Laplace transform and the formula of Mittage–Leffier transform, the transformed equation can be simplified to obtain the analytic solution of the fractional derivative equation with Caputo in the complex field. Afterward, the time-domain analytical solution of the fractional derivative equation defined by Caputo is obtained via inverse Laplace transform.
The Laplace transform formula of the Caputo fractional derivative is as follows

The specific derivation process of equation (23) has been previously described.
38
Through the above calculation process, the value of

The necessary conditions for chaos in the sense of the Smale horseshoe can be obtained by substituting the results of

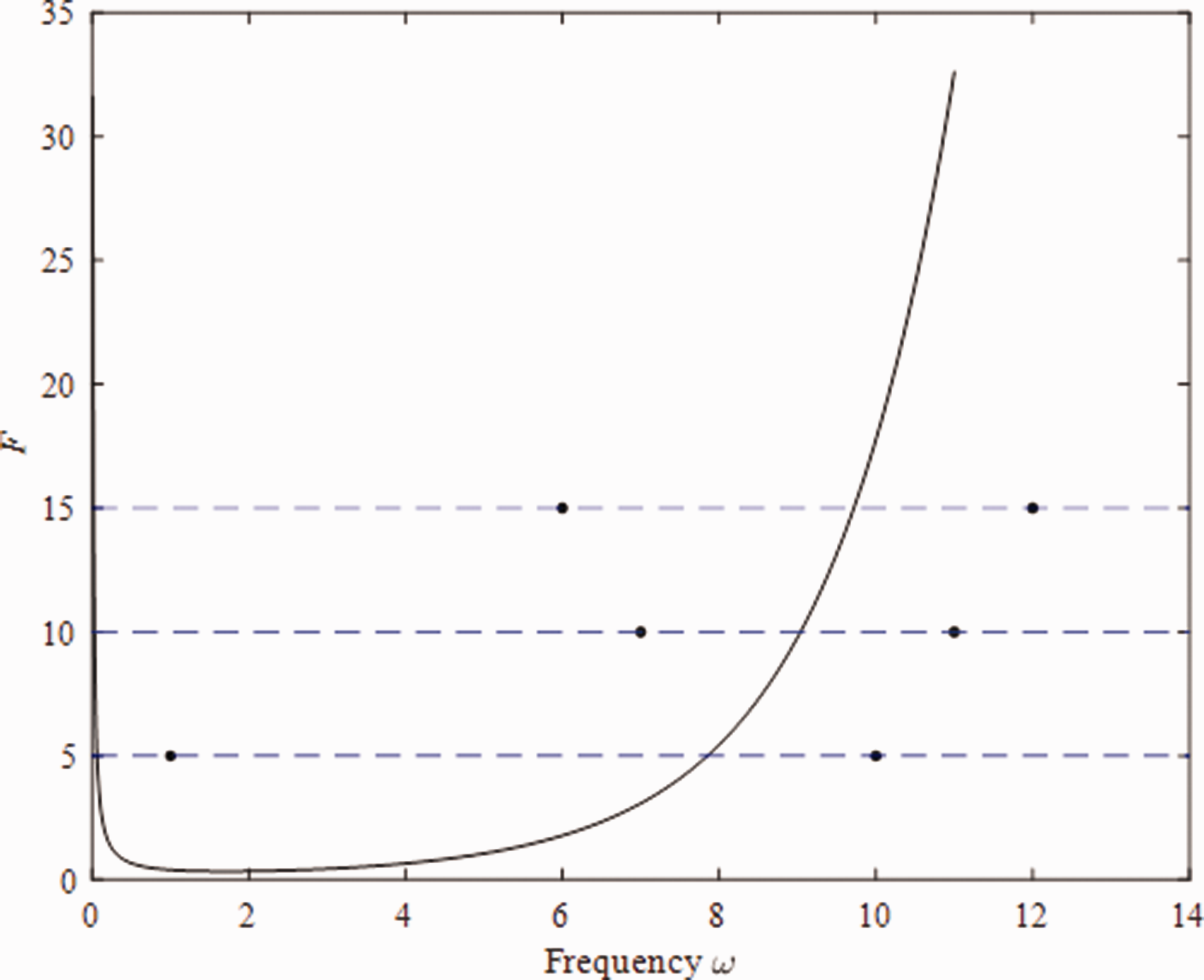
The necessary conditions for chaos generation are determined on the basis of the relationship between excitation amplitude
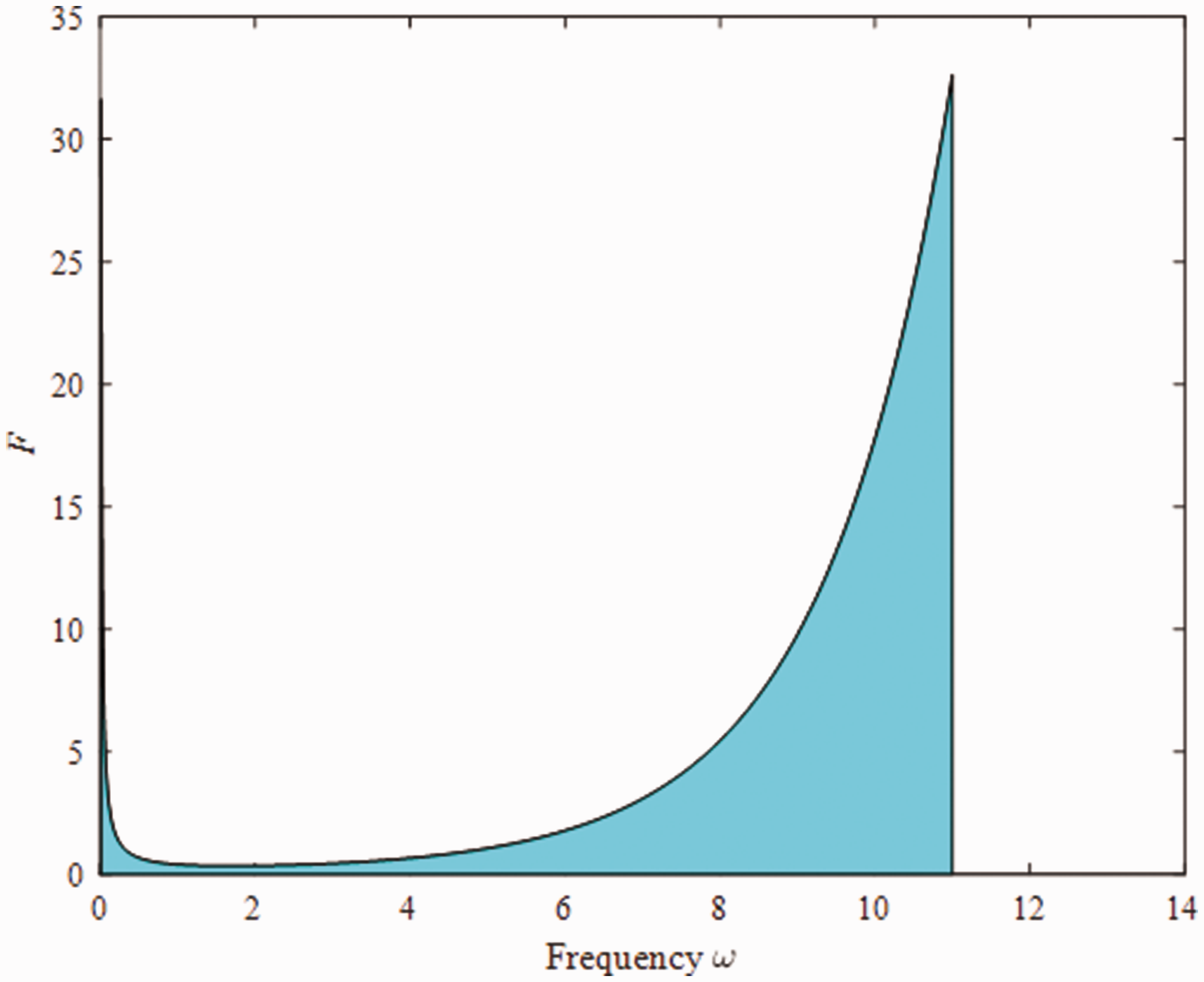
Critical value curve of chaos.
Figure 2 shows that when excitation amplitude value
Numerical simulation and analysis of a fractional Duffing system with nonlinear damping
In this section, the numerical solutions are compared with the analytical solutions of the above-mentioned formulas to verify the correctness of equation (25). The numerical simulation is represented by a small circle, and the analytical solution is represented by a solid line in Figure 3. As indicated in this figure, the change trend of the two curves is the same. Although the analytical solution is not completely equal to the numerical solution, the qualitative results are the same. Although differences occur in the number of verified results, these differences are reasonable. Given that the Melnikov method is an approximate approach to find chaotic motion, it has a certain reference value for the design or modification of similar dynamic systems.
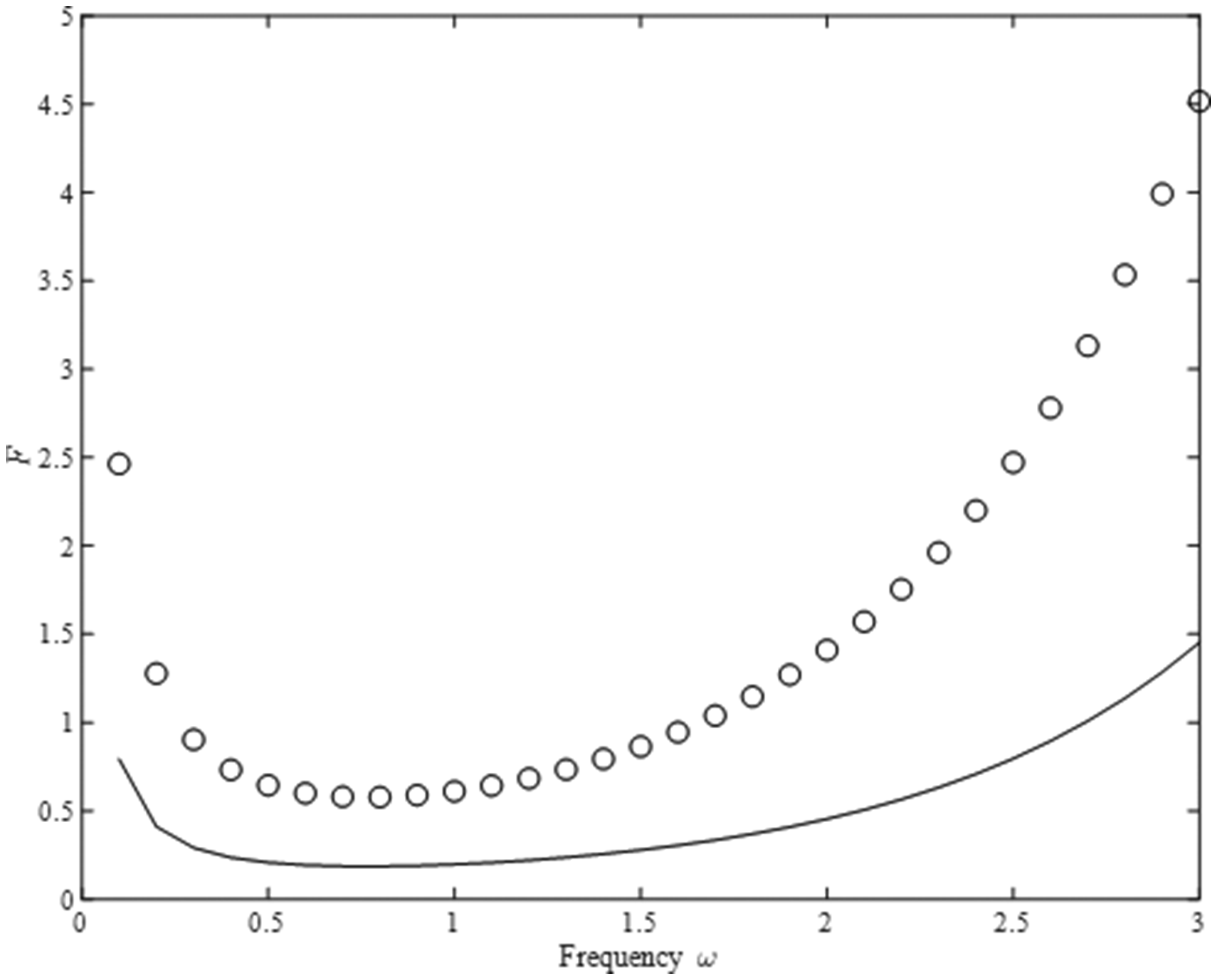
Comparison of the analytical and numerical solutions of the system.
A detailed analysis of typical points is also performed to further illustrate the correctness of Figure 2. The different points in the upper and lower regions of the chaos critical value curve under external excitation amplitude
Confusion threshold and position of each point.
In this study, the different typical dynamic responses under

When
Numerical simulation analysis of chaotic motion region
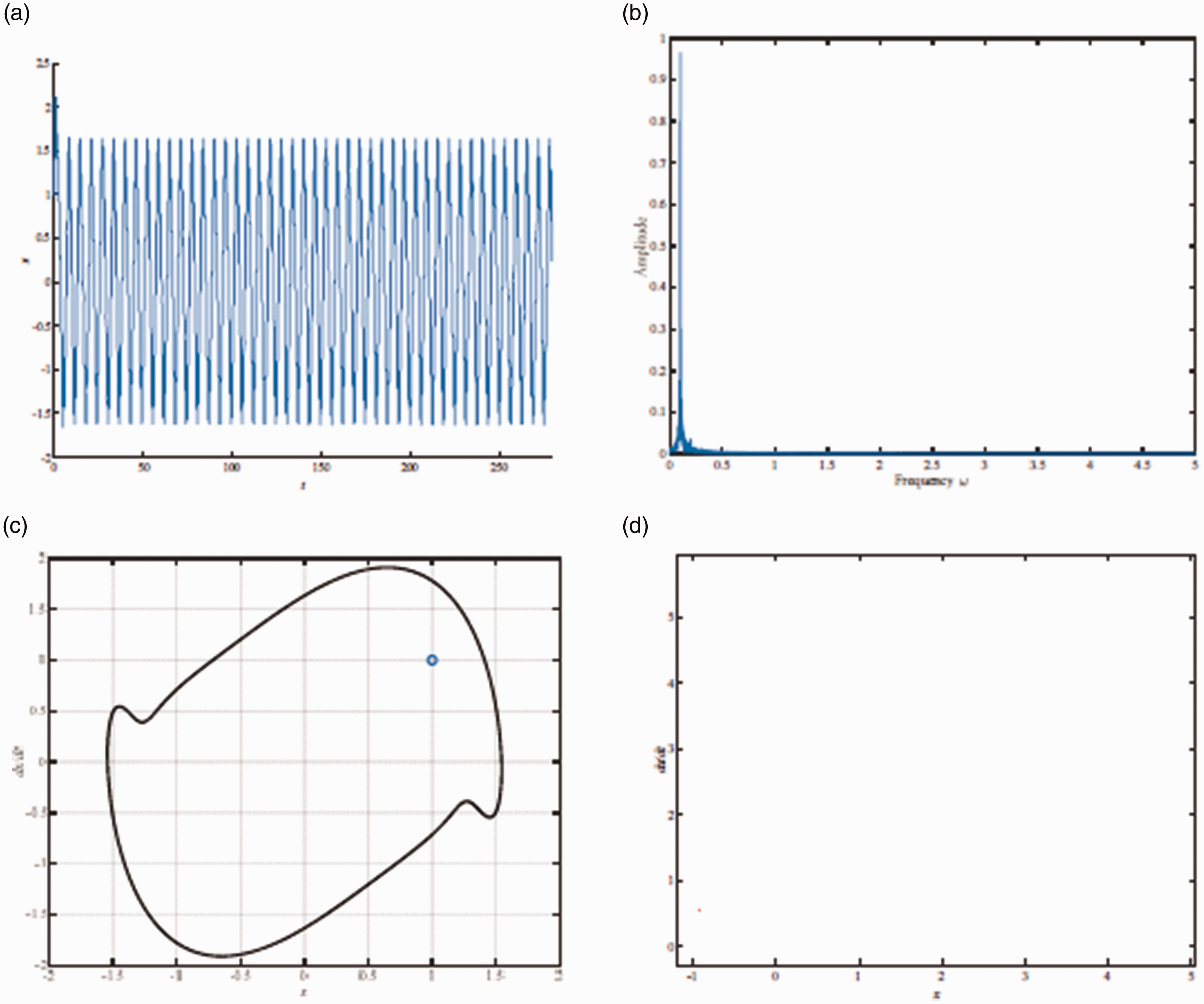
Analysis of Figure 5 indicates that when
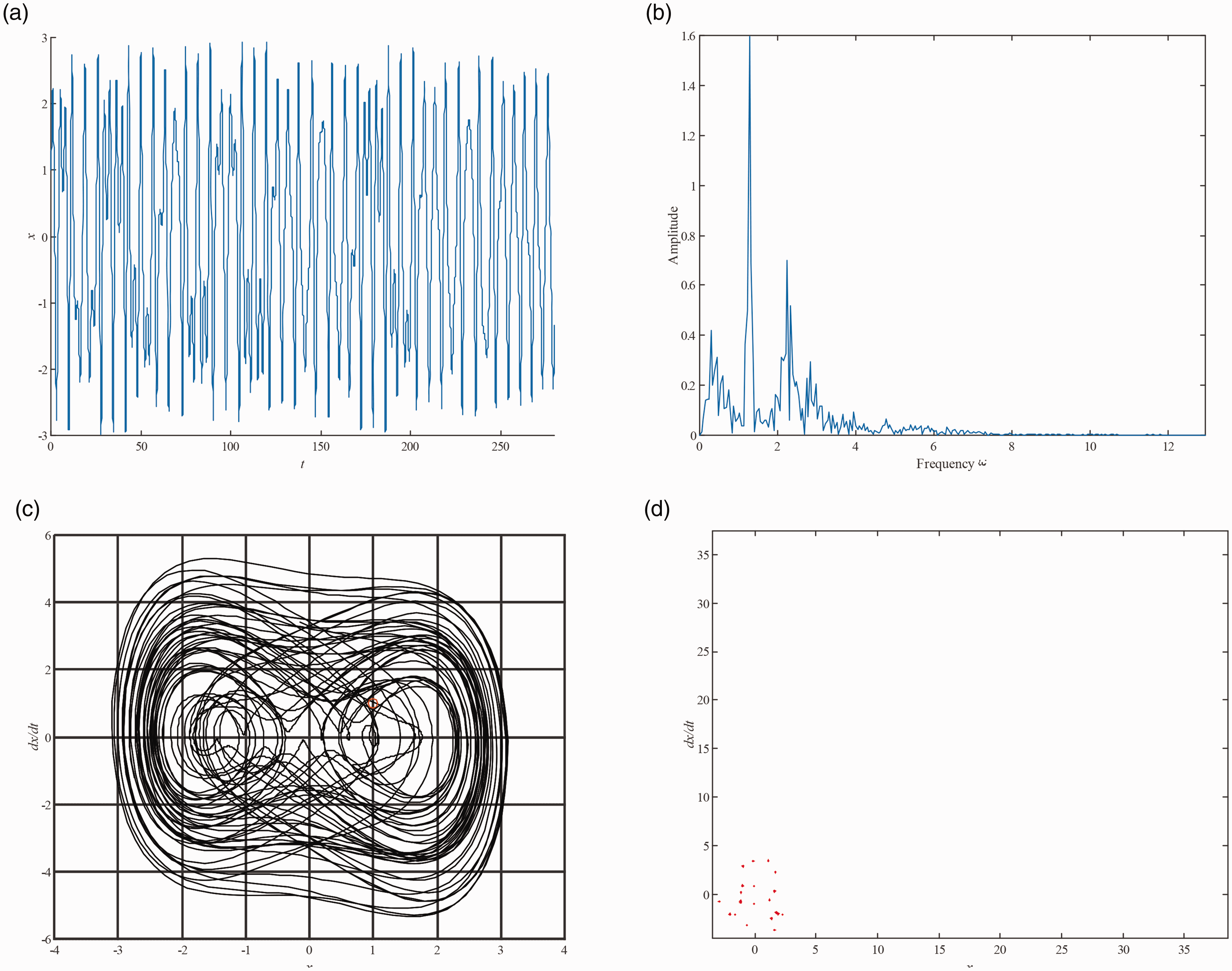
Typical response of point A system: (a) time history diagram, (b) spectrum diagram, (c) phase diagram, and (d) Poincare map.
Figure 6 shows that when
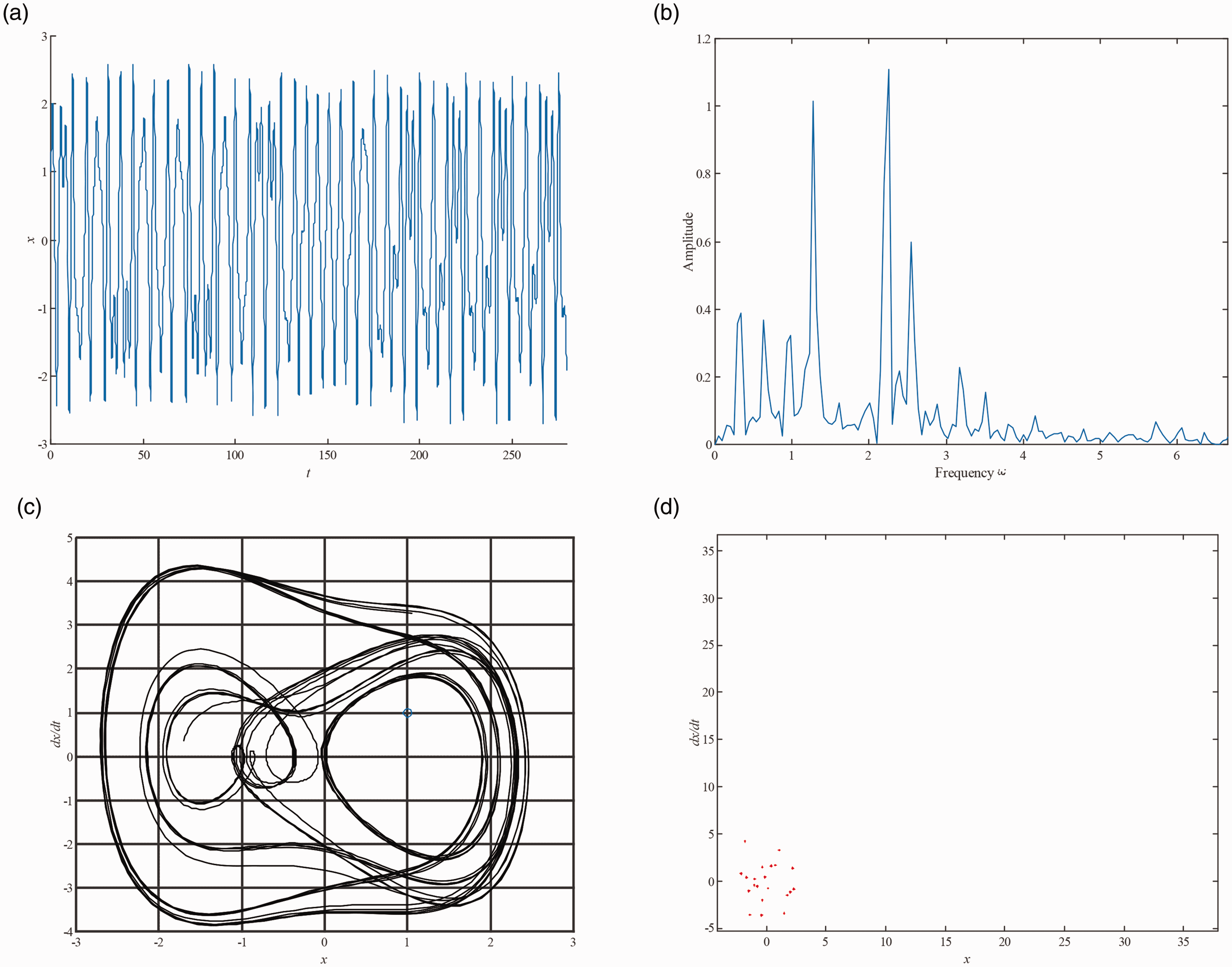
Typical response of point B system: (a) time history diagram, (d) spectrum diagram, (c) phase diagram, and (d) Poincare map.
Figure 7 indicates that when
Typical response of point C system: (a) time history diagram, (d) spectrum diagram, (c) phase diagram, and (d) Poincare map.
Numerical simulation of periodic motion region
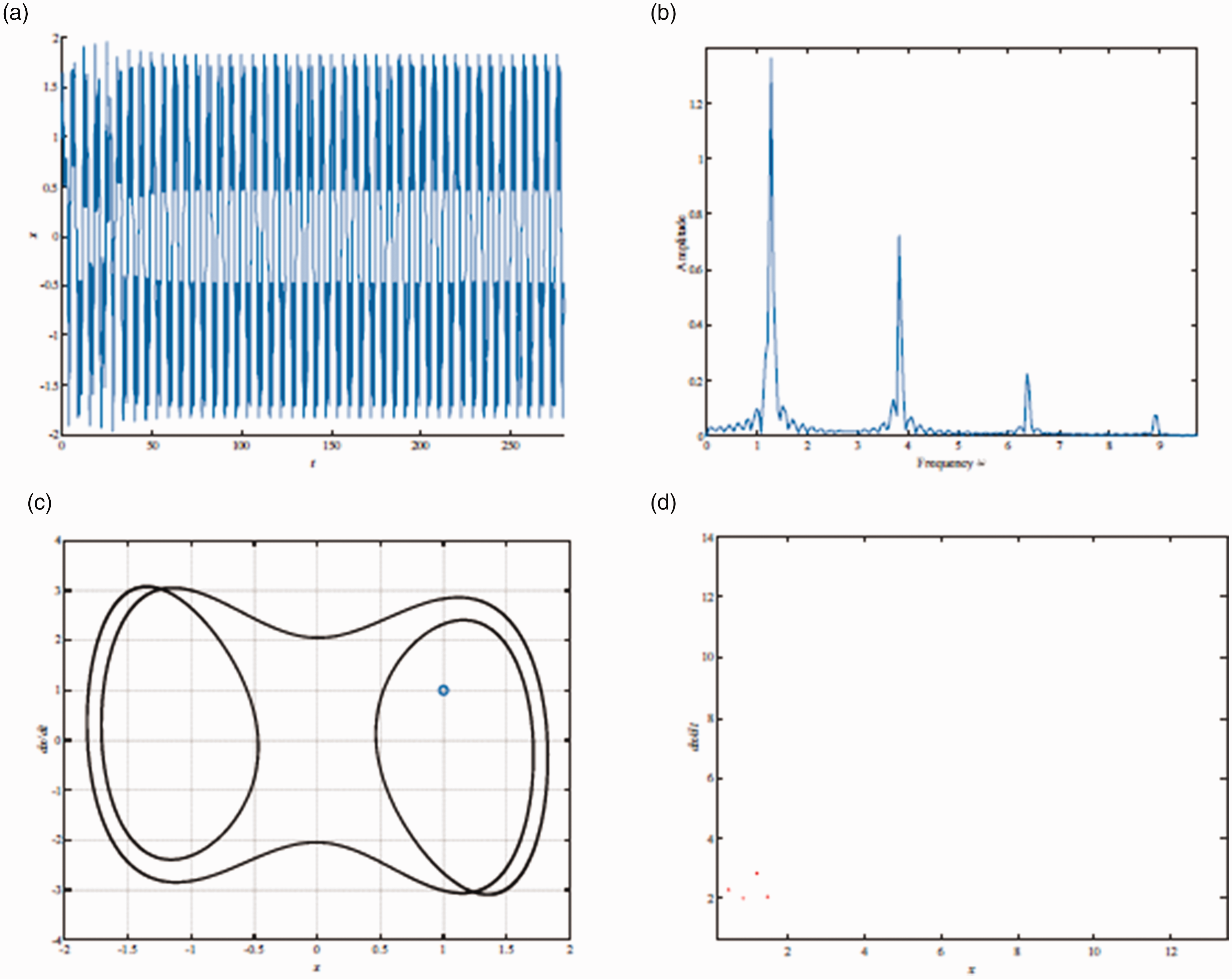
Figure 8 indicates that when
Typical response of point D system: (a) time history diagram; (d) spectrum diagram, (c) phase diagram; (d) Poincare map.
As shown in Figure 9, when

Typical response of point E system: (a) time history diagram, (d) spectrum diagram, (c) phase diagram, and (d) Poincare map.
Figure 10 illustrates that when
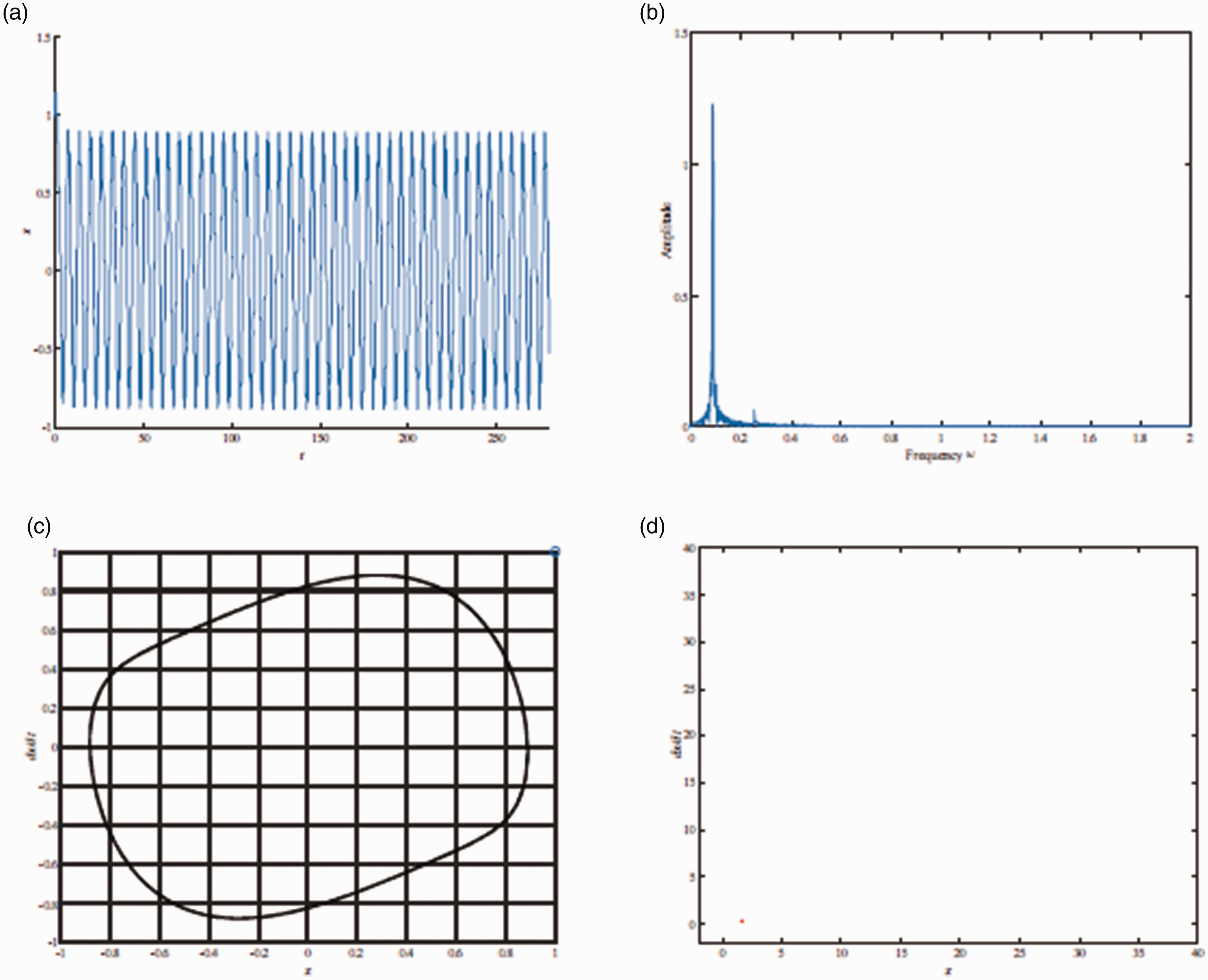
Typical response of point F system: (a) time history diagram, (d) spectrum diagram, (c) phase diagram, and (d) Poincare map.
In conclusion, when the excitation amplitude F of the system is higher than the critical curve of chaos, the system has the possibility of chaotic motion. When the excitation amplitude F of the system is lower than the critical curve of chaos, the system presents stable periodic motion. The numerical simulation results show that the critical curve of chaos calculated by the analytical method is correct, indicating that the Melnikov method can be used to solve the necessity of generating chaos conditions. As indicated by the dynamic response diagram of point F to point A, as the point gradually approaches the critical curve of chaos and gradually crosses the critical curve of chaos, the system is gradually transformed from single periodic motion to four-period motion, which is in turn transformed to chaotic motion. When entering the chaotic motion region, the system moves aperiodically. Thus, abundant nonlinear dynamics occurs in the region near the chaotic critical curve.
Influence of system parameters on chaotic motion
In this section, we mainly analyze the influence of six parameters (
Influence of linear term parameters on chaotic motion
The coefficient of the linear term includes linear stiffness coefficient
Figure 11 indicates that when k1 increases, the curve F value increases, that is, the critical value of chaos increases. The critical curve of chaos increases with the increase in k1 and finally becomes infinite. Thus, as k1 increases, chaos becomes increasingly difficult.
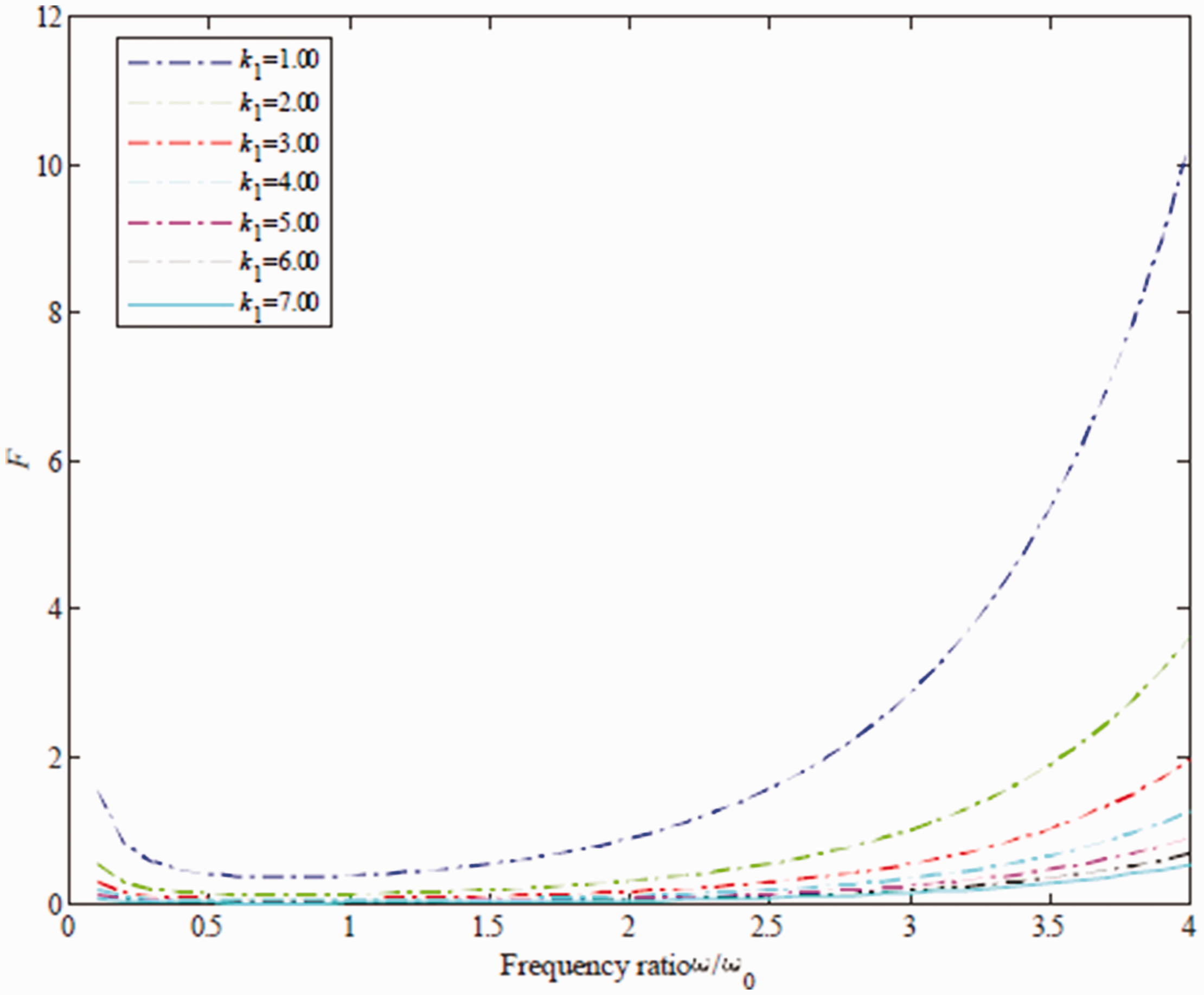
Critical curve of chaos for
As shown in Figure 12, when
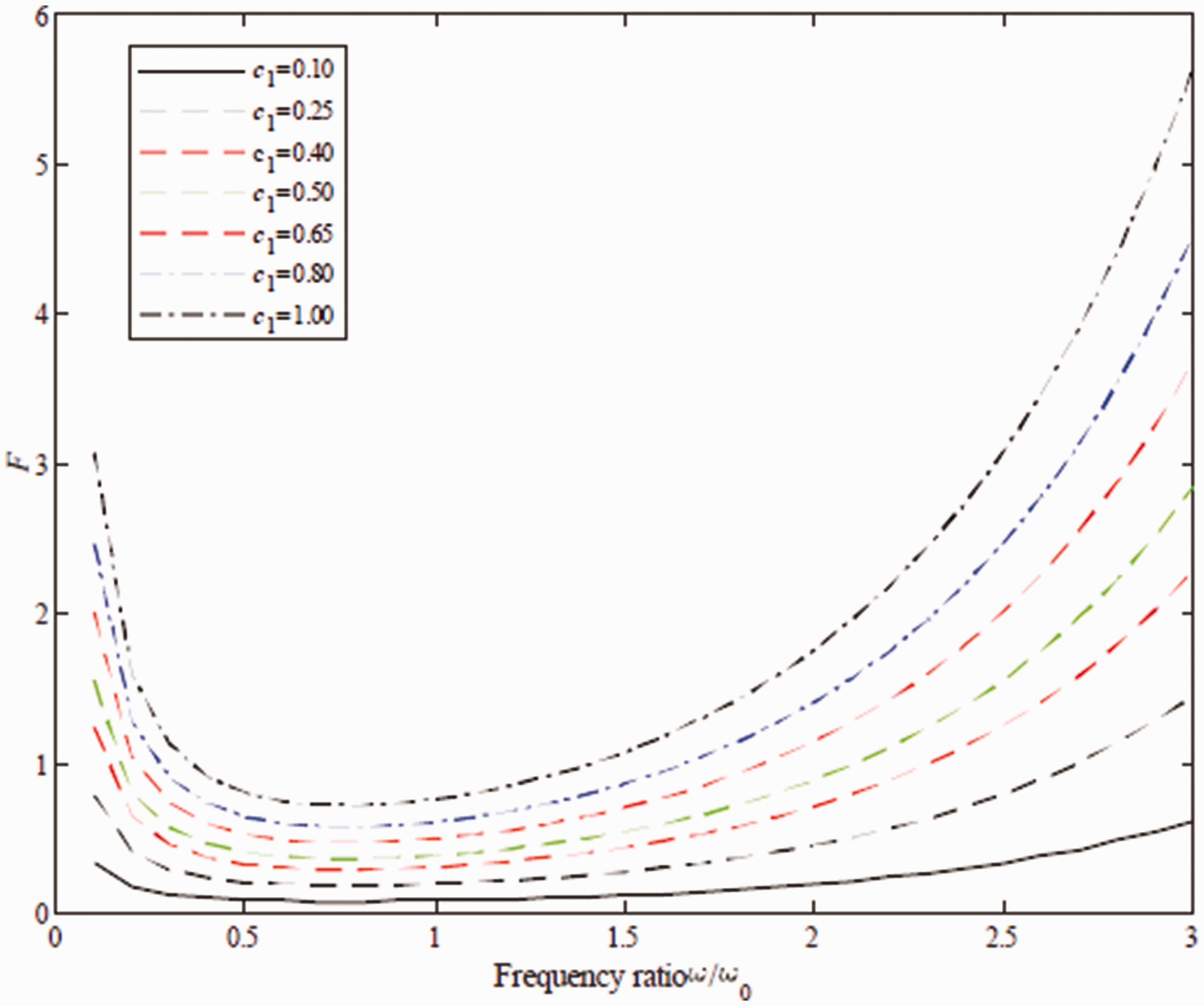
Critical curve of chaos for
As shown in Figures 11 and 12, with the increase in the linear stiffness and damping of the system, the critical value of chaos is increased, and the possibility of chaos is reduced. The difference is that as the linear damping increases, the minimum value of the critical curve of chaos decreases, thus reducing the area of chaos. Therefore, the linear stiffness of the system greatly influences the area of chaos. In practical applications, the nonlinear damping of the system can be adjusted to effectively avoid chaos.
Influence of nonlinear parameters on chaotic motion
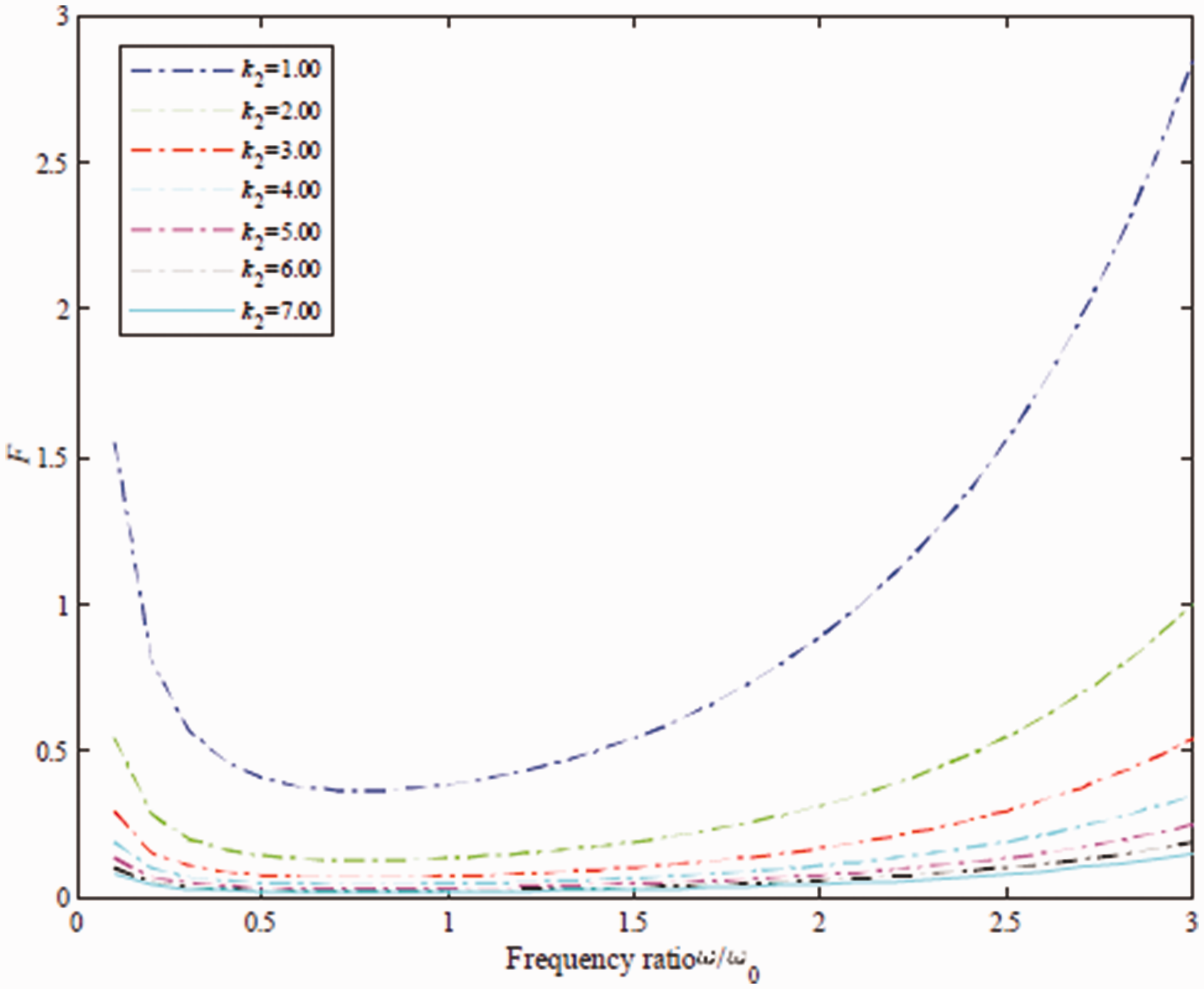
The coefficient of the nonlinear term includes nonlinear stiffness coefficient
Figure 13 illustrates that when
Critical curve of chaos for
As shown in Figure 14, when
Critical curve of chaos for
Figures 13 and 14 illustrate that with the increase in the nonlinear stiffness of the system, the critical value of generating chaos decreases. As the nonlinear damping increases, the critical value of chaos increases, and the possibility of generating chaos decreases. Given that the minimum value of the critical curve of chaos decreases with the increase in nonlinear damping, the area where chaos occurs decreases. Nonlinear damping greatly influences the chaotic area of the system. Therefore, in practical applications, the occurrence of chaos can be effectively avoided by adjusting the nonlinear damping of the system.
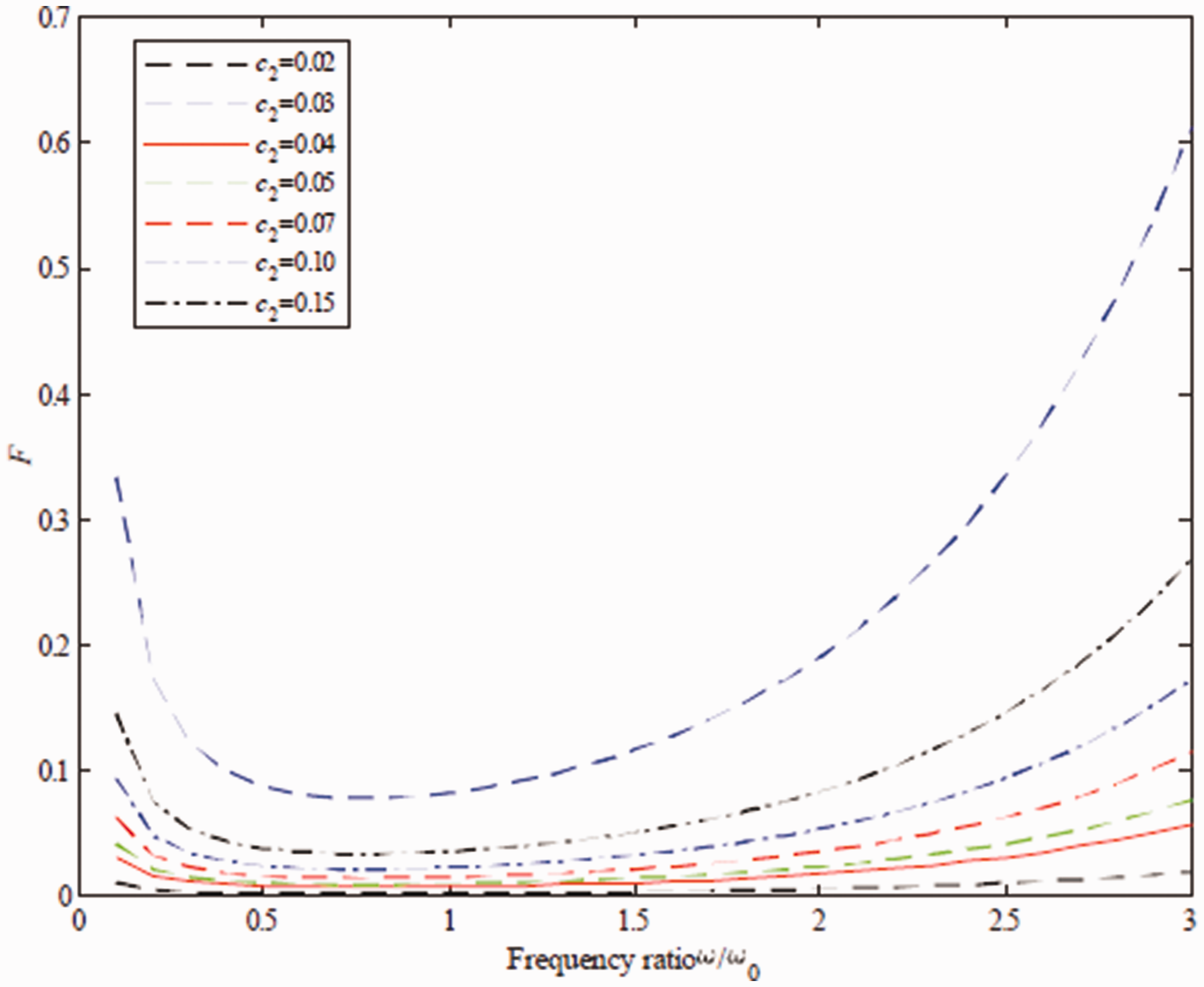
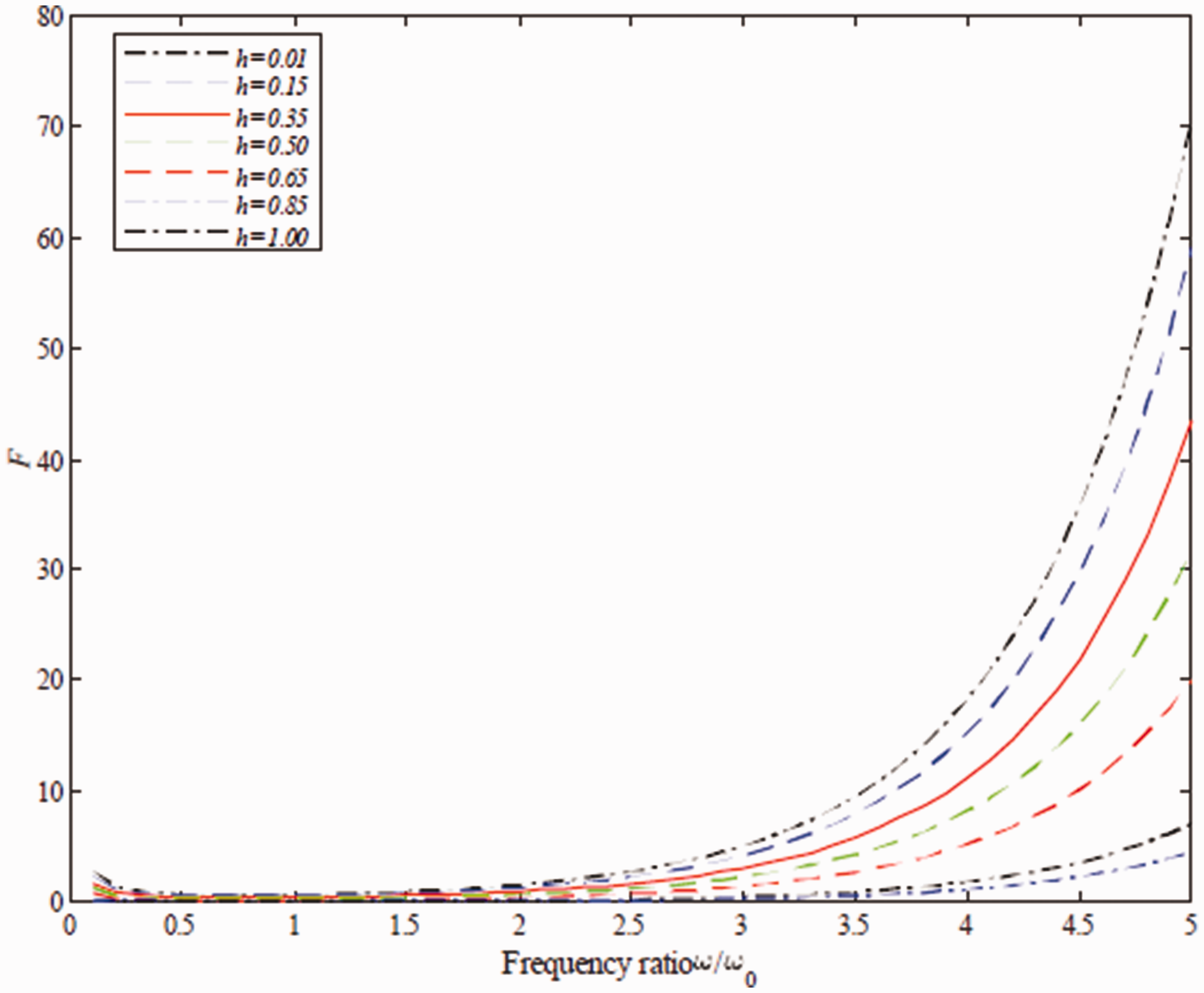
Effect of fractional order parameters on chaotic motion
Figure 15 shows that increasing the coefficient of the fractional derivative causes the peak value of the chaos critical curve to decrease. The region of chaos is reduced, and the occurrence possibility of chaos in the system
Critical curve of chaos for
Figure 16 indicates that increasing the order
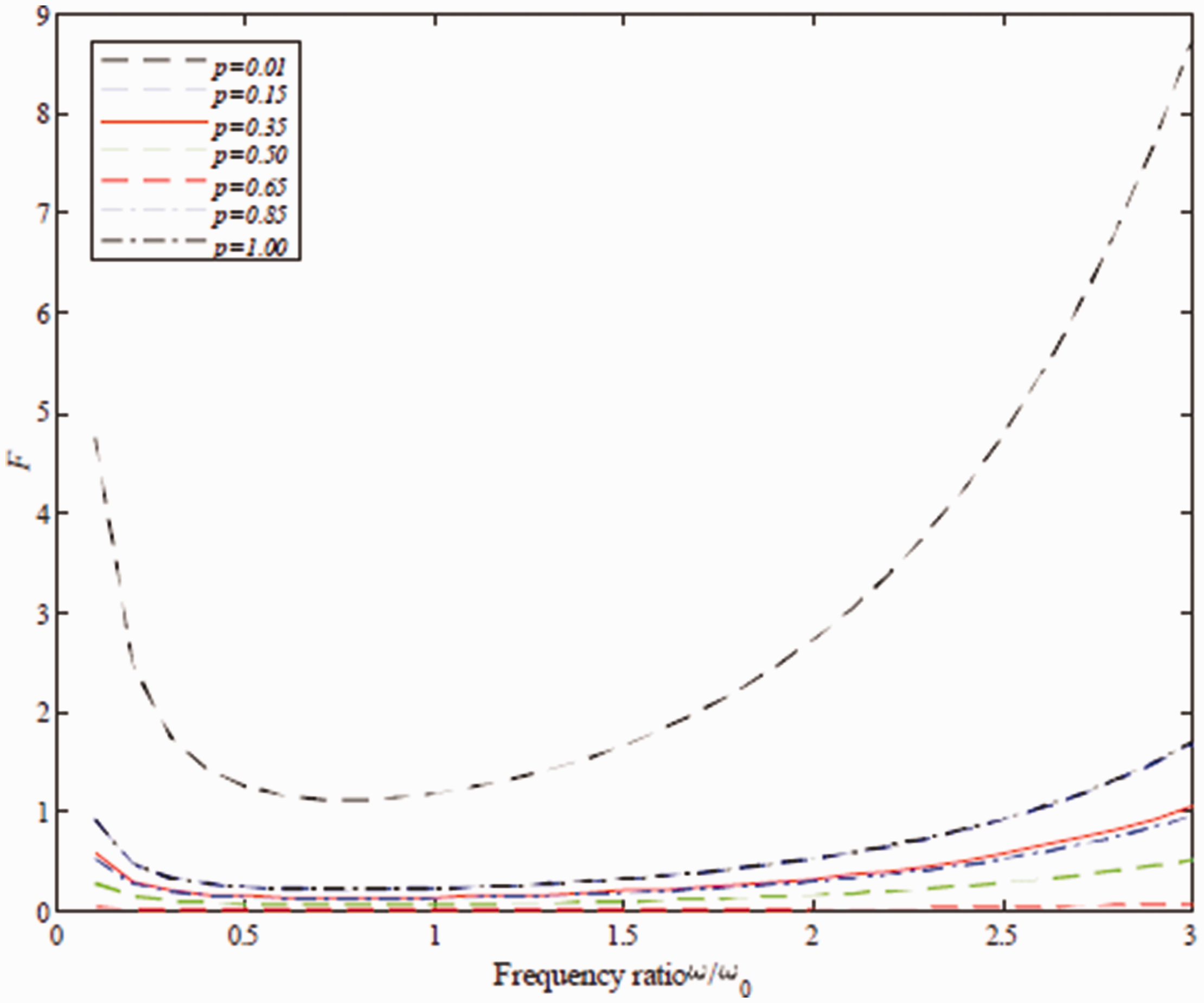
Critical curve of chaos for
A comparison of Figures 15 and 16 shows that the parameters of the fractional derivative, especially the coefficients of the fractional derivative, can influence the threshold of chaos. The smaller the order of the fractional derivative is, the less likely the system is to produce chaos. The introduction of fractional derivatives can accurately describe the nonlinear dynamic behavior of physical objects with fractional properties, such as viscoelastic materials, damping, dynamic characteristics of gear clearance, friction, and mechanical system impact. The analysis shows that the parameters of fractional derivatives have an important influence on the critical value of chaos. When the system is under small amplitude stationary excitation, chaos does not occur. However, under large amplitude excitation, shock and chaos may occur. Given that chaos increases the instability of the system, we should choose appropriate parameters to avoid chaos.
Conclusion
This study investigates the chaotic dynamics of the Duffing oscillator with a fractional derivative with nonlinear damping under harmonic excitation and analyzes the influence of different parameters on a chaotic motion threshold. On the basis of Melnikov theory, the necessary conditions for chaos analysis in the sense of the Smale horseshoe are obtained. The correctness of the analytical results is verified indirectly by numerical simulation. The effects of linear and nonlinear parameters on Smale horseshoe chaos are analyzed in detail. The results show that the stiffness and damping coefficients of the system exert a significant influence on the critical value curve of chaos. The results of this study can provide a reference for the analysis of dynamic systems with fractional derivatives with nonlinear damping and are highly relevant to the design and control of such systems.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work is supported by the Major Program of the National Natural Science Foundation of China (No. 11790282), the National Natural Science Foundation of China (No. 11702179, 51605315, 11802183), the Young Top-Notch Talents Program of Higher School in Hebei Province (No. BJ2019035), the Independent Project of State Key Laboratory of Mechanical Behavior and System Safety of Traffic Engineering Structures (No. ZZ2020-42), and the Preferred Hebei Postdoctoral Research Project (No. B2019003017).