
Abstract
In this paper, a nonlinear two-degrees-of-freedom active suspension system model with time-delayed feedback control is studied. It is well known that a time delay has destabilizing effect in mathematical models. A stability judgment method is proposed, which is produced in the process of seeking analytic solutions by using multiple-scales method. The influence of feedback control parameters with time delay on vibration reduction of active suspension system is studied. The optimal feedback control parameter combination is obtained. Numerical simulations are provided to support the theoretical analysis. The results show that the feedback gain coefficient and time delay can be used as switches for controlling the stability of the system. The vibration of the nonlinear active suspension system with time delay can be controlled by adjusting the time delay and gain coefficient. There is an optimal parameter combination of gain coefficient and time delay, so that the vibration damping effect is the best. Under the optimal parameters control, the vibration of vehicle is obviously reduced compared with that without control, which proves the effectiveness of time-delayed vibration reduction control in automobile application.
Introduction
In recent years, how to improve the vibration damping performance of suspension system and improve the stability of vehicle has been the main research direction of active control suspension technology. Active control suspension system 1 has stronger advantages compared with passive suspension and semi-active control suspension. It can make real-time adjustment according to the feedback data in the process of vehicle driving, actively suppress the impact of uneven road surface on the body, improve ride comfort, and extend the service life of vehicle parts.
In practical application, time delay inevitably exists in the control system of structure, which makes the system unstable and even produces bifurcation and chaos. Studies have found that appropriate feedback control law with time delay can improve system performance and even make unstable systems become stable. 2 With the development of active vibration control technology, the feedback control force with time delay can be effectively used as an active control item in the vibration damping system. Olgac et al. 3 proposed the concept of time-delay resonator, that is, a time-delayed feedback excitation based on the position of the mass block was actively added on the basis of the traditional mass-spring damping vibration absorber to obtain better damping effect. In order to further develop the time-delay damping technology, Olgac and Holm-Hansen 4 made a theoretical analysis of the time-delay resonator and discussed the problem of dynamic stability, and the simulation results showed that the vibration of the main system could be reduced or completely eliminated by adjusting the feedback gain coefficient and the size of the time delay. Since the time-delay damping technology was proposed, it had been rapidly developed in theoretical experimental research and industrial application of time-delay damping, and the research on time-delay resonator ranged from single degree of freedom to multiple degrees of freedom, from linear system to nonlinear system. Jalili and Olgac 5 studied the use of multi-delay resonator (DR) to suppress the vibration of multi-degree-of-freedom mechanical structure, and gave an example of placing two identical time-delay resonators on a three-degree-of-freedom system.
With the development of vehicle active suspension technology, time delay is introduced into the actuator as a non-negligible factor. For the research of active suspension system with time delay, there are two key technologies. One is the stability of the control system with time delay (linear or nonlinear). The other is the actuator optimal control method with time delay. It is well known that a controlled system is asymptotically stable when all the characteristic roots of the characteristic equation of the system are negative real parts. For linear time-invariant systems with time delay, the existence of time delay makes the characteristic equation contain transcendental exponential term, which makes the evaluation of system stability more complicated. 6 To solve this problem, many methods are proposed to evaluate the stability of time-delay systems. Jalili and Olgac 5 used the Stability Charts to solve the stability problem of system. Jalili and Esmailzadeh 7 proposed a new fixed-delay stability diagram strategy to ensure the stability of the system. Wang and Hu 2 used the generalized Strum criterion to determine whether polynomial equations have real roots. Naik and Singru 8 proposed a method for identifying critical forcing function and delay of a single degree of freedom quarter-car model with time delay. Some studies have shown that there is a small region to realize the time-delay independent stability of the system.9,10 Koumene Taffo and Siewe Siewe et al.11,12 studied the nonlinear quarter-car model with delay, and analyzed the stability of its linear model by using generalized Strum criterion, the results showed that the system had a small parameter region to achieve delay-independent stability, and the critical delay of the stability switch was deduced. Wirkus and Rand 13 showed that complex bifurcated sequences occur in a very small parameter space region. The design of optimal controller was also concerned by many scholars. Huan et al. 14 studied the multi-objective optimal design of linear resonators with time delay, and the continuous time approximation method was used to analyze the time-delay system. Jalili and Esmailzadeh 7 proposed an optimal control method of vehicle suspension system considering actuator delay, a set of optimal feedback gains were obtained by constraint optimization in a wide band frequency range to minimize the maximum vertical acceleration of sprung mass. Zhao and Xu 15 obtained a set of optimal time delay and feedback gain by taking the minimum amplitude of the main system as the condition, the simulation results showed that the vibration of the main system under the optimal feedback parameter control was 90% less than that of the passive system without control.
The above mainly studied the stability of linear systems or simplified nonlinear systems into linear systems. In this paper, a nonlinear active suspension system model with time-delay displacement feedback control is built. A stability analysis method for nonlinear time-delay systems is proposed. The stability of the original nonlinear system is determined by analyzing the stability of the equilibrium solutions of the average equations, which is obtained in the process of seeking analytic solutions by using multiple-scales method. The stability criterion is obtained by using Lyapunov theorem. The feedback parameters are optimized to minimize the root-mean square (RMS) of vehicle displacement. Finally, the correctness of the theoretical analysis is verified by numerical simulation.
Mathematical modeling
The model under investigation is presented in Figure 1. The sprung mass (vehicle body) m1 represents the part of the vehicle body above the axle, and the unsprung mass m2 represents the axle and wheel of the vehicle. The vehicle body is supported by a nonlinear damper and a nonlinear spring, both of which have cubic nonlinearity. The unsprung mass is linked to the road surface by a linear damper and a linear spring. A time-delay displacement feedback controller is introduced between sprung mass and unsprung masse. In Figure 1, x1 and x2 are the vertical displacements of the sprung mass and unsprung mass respectively; xd is the road excitation displacement; g1[x1(t−τ) − x1(t)] is the feedback control force with time delay.
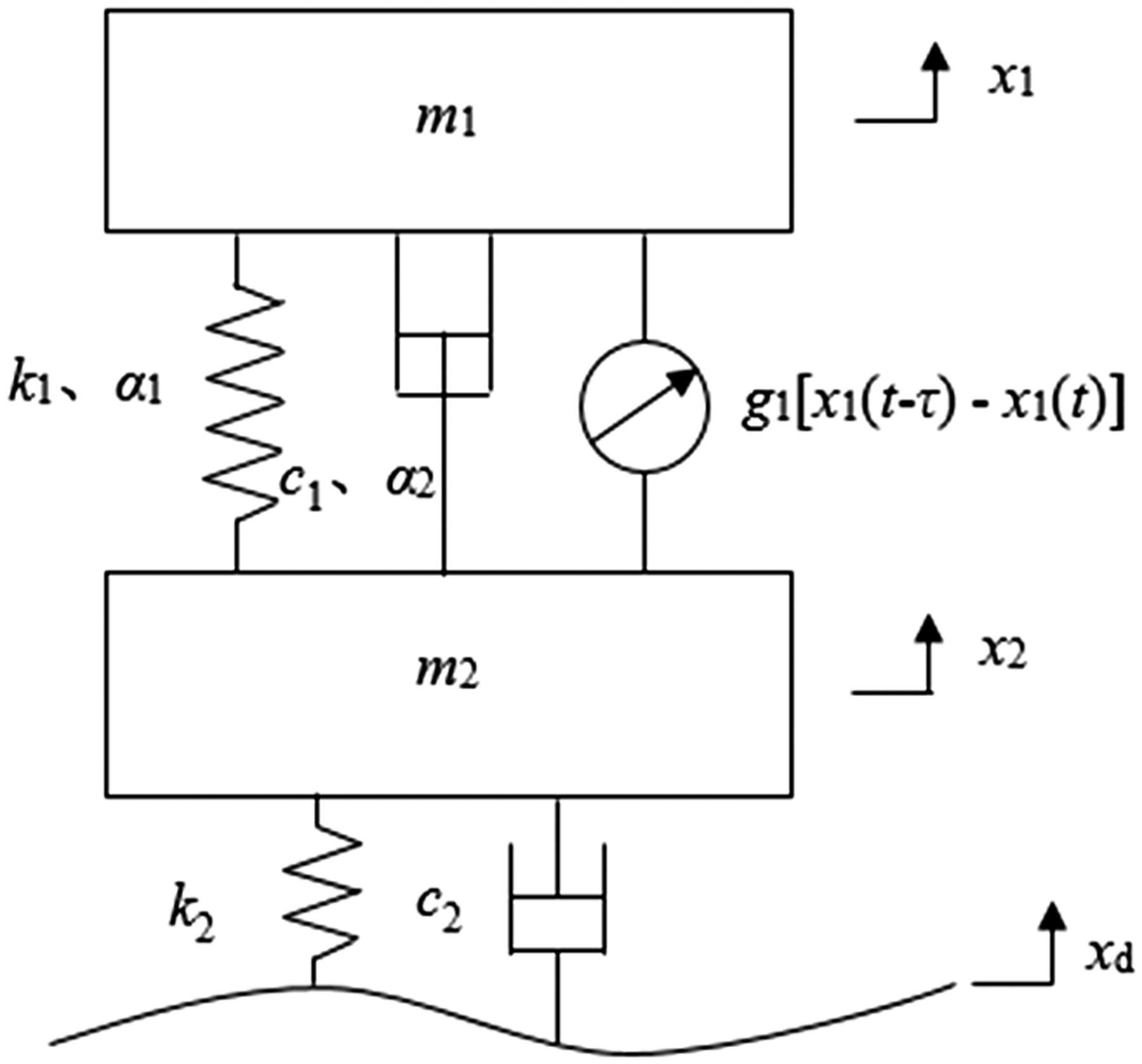
Model of 1/4 active suspension system.
Both spring force and damping force are nonlinear. Assuming that the system is under the action of periodic road excitation, xd = Asin(ωt), according to Newton’s second law, the dynamic equations of the active suspension system can be expressed as


Stability analysis based on multiple-scales method
Perturbation analysis
Dimensionless quantities are introduced:



For perturbation analysis, the variables are rescaled



According to the idea of multiple-scales method, the time variable with different scales is introduced: Tn = εnt(n = 0,1,2,…), so the nonlinear vibration process is a function of time variables with different scales, and the quadratic approximate analytic solution can be expressed as


Substituting equations (7) and (8) into equations (5) and (6), and making the coefficient of the same power of ε equal to zero, the solutions of y10 and y20 are obtained as








Equilibrium solutions and stability analysis
When
Writing them in matrix form

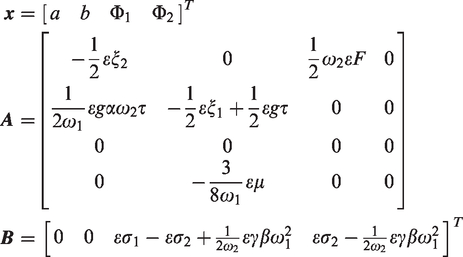
Its characteristic equation is

Expanding it to polynomial form

λ is the eigenvalue of the characteristic equation. Parameter values are: ω1 = 1, εσ1 = 0, εσ2 = 0.1, εγ = 0.1, εδ = 0.1, εμ = 0.1, εξ1 = 0.1, εξ2 = 0.1, εF = 0.5. According to Routh–Hurwitz criterion, when the following conditions (equation (19)) are true, all the real parts of the characteristic roots of the characteristic equation are negative. According to the first theorem of Lyapunov first-order approximation theory, the equilibrium solution of the original equations (13) to (16) is asymptotically stable, and the motion of the system equations (5) and (6) is asymptotically stable.

Vibration reduction analysis and optimization
In order to analyze the influence of time-delayed feedback control on the vibration reduction of the system, the amplitude of vehicle displacement response under different time-delayed feedback control parameters is studied. Runge–Kutta method is used to simulate the dimensionless system equations (5) and (6). Set the initial conditions as follows:
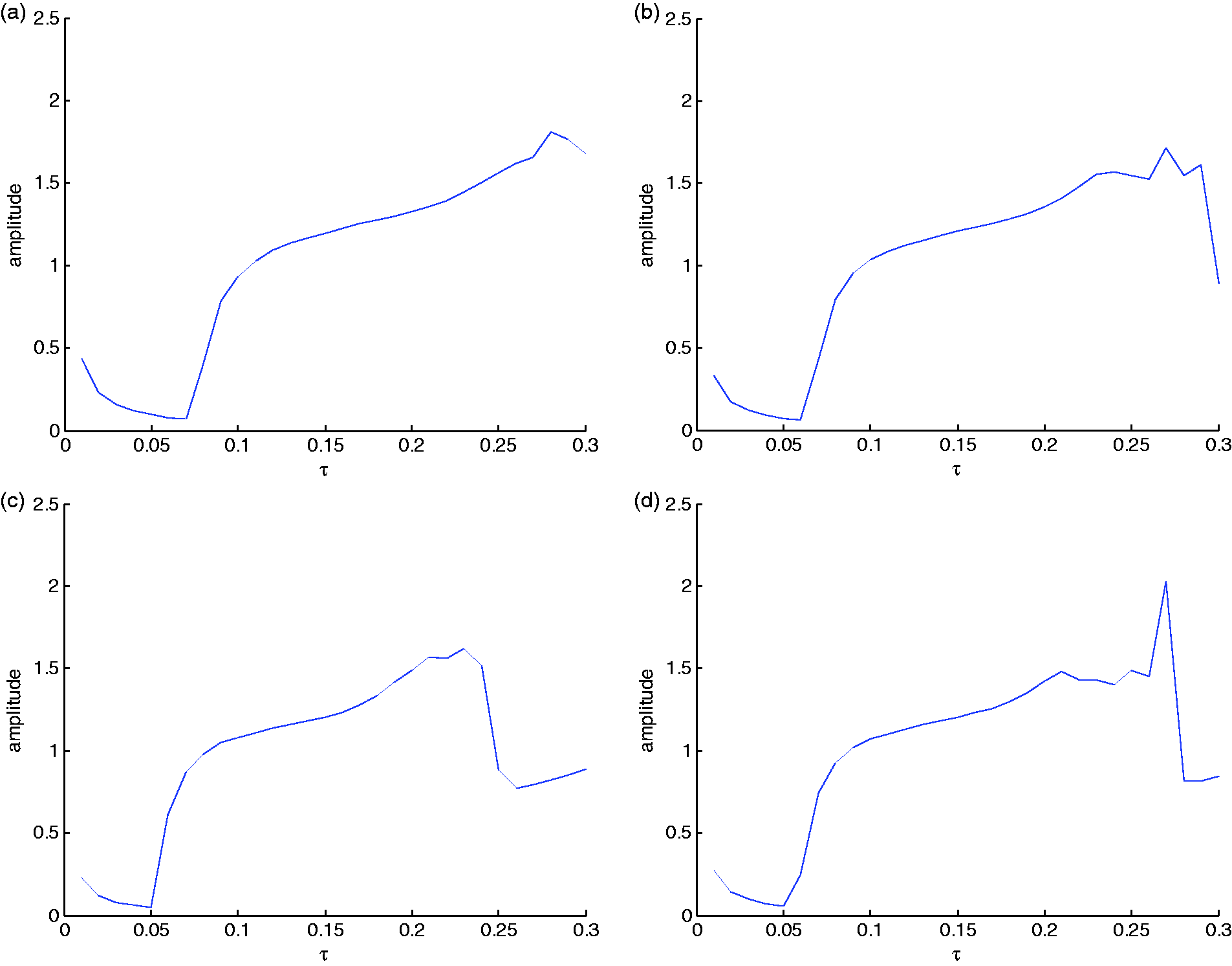
Response curves of body displacement amplitude and time delay under different feedback gain coefficients. (a) εg = −900; (b) εg = −1200; (c) εg = −1500; (d) εg = −1800.
By observing the four figures shown in Figure 2, it can be found that for the fixed gain coefficient, the amplitude of vehicle displacement decreases with the increase of time delay, and then increases rapidly after reaching the minimum point, indicating that appropriate parameters can reduce the vibration of vehicle body, and the optimal parameters combination makes the amplitude of vehicle body minimum. So, take the parameters range:

By calculation, the optimized results conform to the stability conditions of equation (19).
Sinusoidal excitation simulation
In order to express the vibration reduction effect of the time-delay damping controller more clearly, the response of the active suspension system under the time-delayed feedback control with optimal parameters is compared with that of the passive suspension system without control. And the results are showed in Figures 3 and 4.
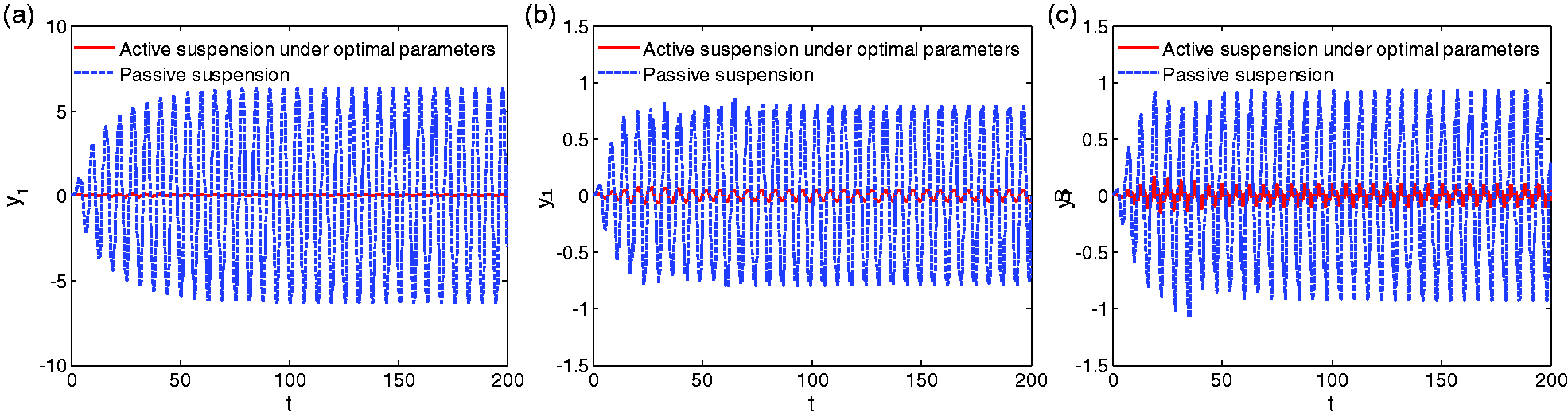
Comparison diagram of vehicle body response under sinusoidal excitation. (a) Displacement of the vehicle body; (b) Velocity of the vehicle body; (c) Acceleration of the vehicle body.
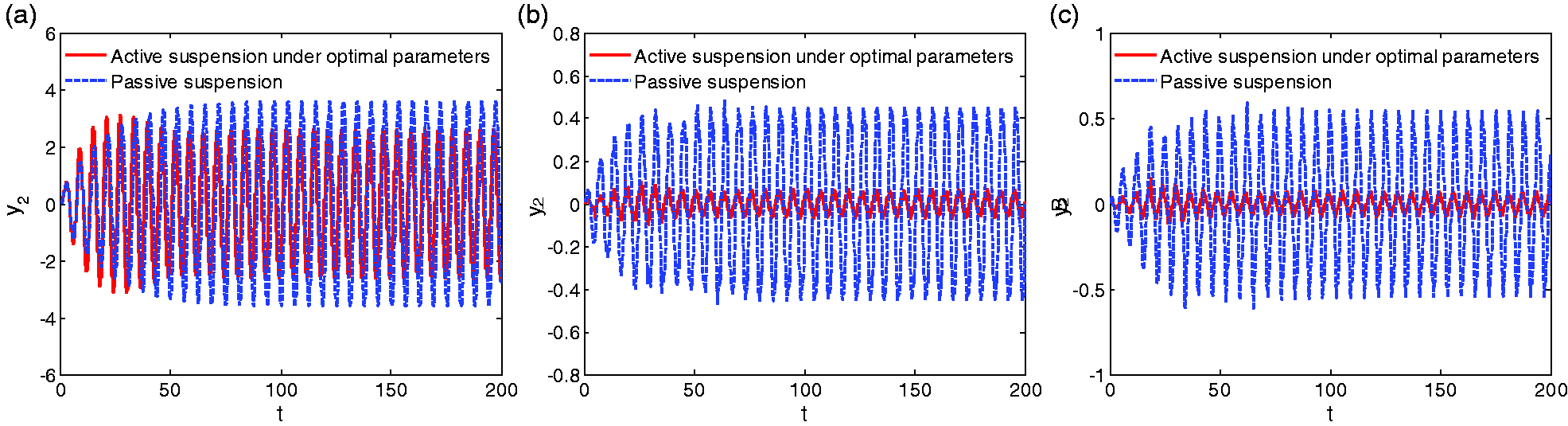
Comparison diagram of tire response under sinusoidal excitation. (a) Displacement of the tire; (b) Velocity of the tire; (c) Acceleration of the tire.
Looking at Figure 3, one can see that, compared with the uncontrolled passive suspension system, the amplitude of displacement, velocity, and acceleration of the vehicle body under the optimal parameters feedback control with time delay decreases significantly, especially the vibration of the vehicle body displacement is almost completely eliminated. Figure 4 shows the comparison diagram of tire response. It can be found that the amplitude of tire displacement decreases to some extent, and the amplitude of tire velocity and acceleration significantly decreases. In order to quantitatively analyze the vibration reduction effect of time-delayed vibration control, the RMS values of vehicle body response and tire response are listed in Tables 1 and 2. Compared with the uncontrolled passive suspension system, the RMS of the vehicle body displacement, velocity, and acceleration under the optimal parameters delay feedback control is reduced by about 99.07%, 94.01%, and 91.41%, respectively, and the RMS of the tire displacement, velocity, and acceleration is reduced by about 24.33%, 88.29%, and 87.66, respectively. This is consistent with the above simulation results. In conclusion, the optimal parameters time-delayed feedback control can improve the vibration damping performance and ground holding performance of suspension.
Body response value.

RMS: root mean square.
Tire response value.

RMS: root mean square.
Random excitation simulation
The above analysis results are all under harmonic excitation. In order to further explore the vibration reduction performance of time-delayed feedback control, the road excitation is changed from harmonic excitation (xd = Asin(ωt)) to random excitation, so as to explore the vibration reduction control effect of time-delayed feedback control on random road excitation. Assume that the system is subjected to random excitation of road surface with xd = AG(ωt), G(t) is gaussian white noise, its power is 0 dBW, sampling frequency is 10, and sampling time is 100. The time domain diagram is shown in Figure 5. The response simulation diagram of body and tire under random excitation is shown in Figures 6 and 7. Tables 3 and 4 quantitatively give the response percentage change of body and tire under random excitation.
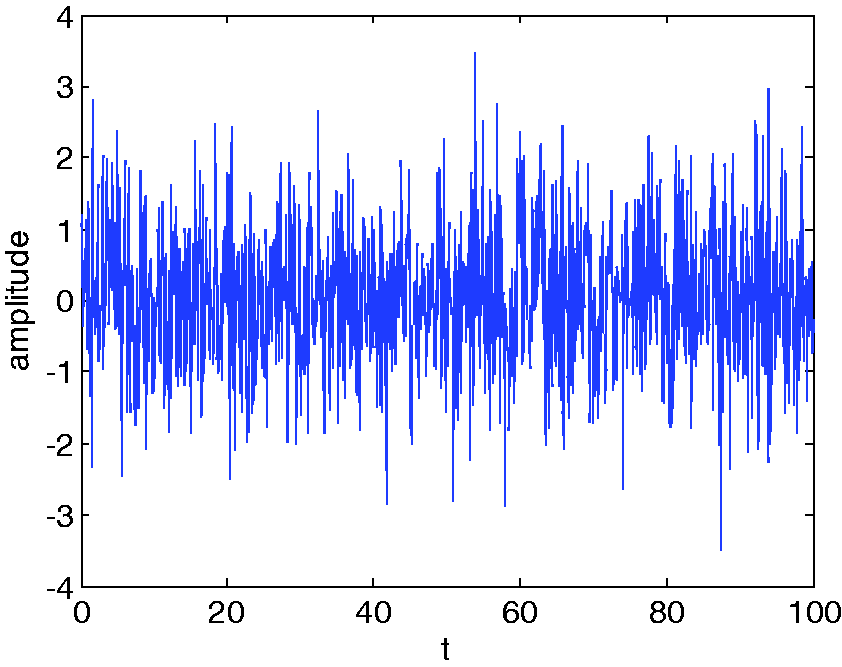
Time domain diagram of random excitation.
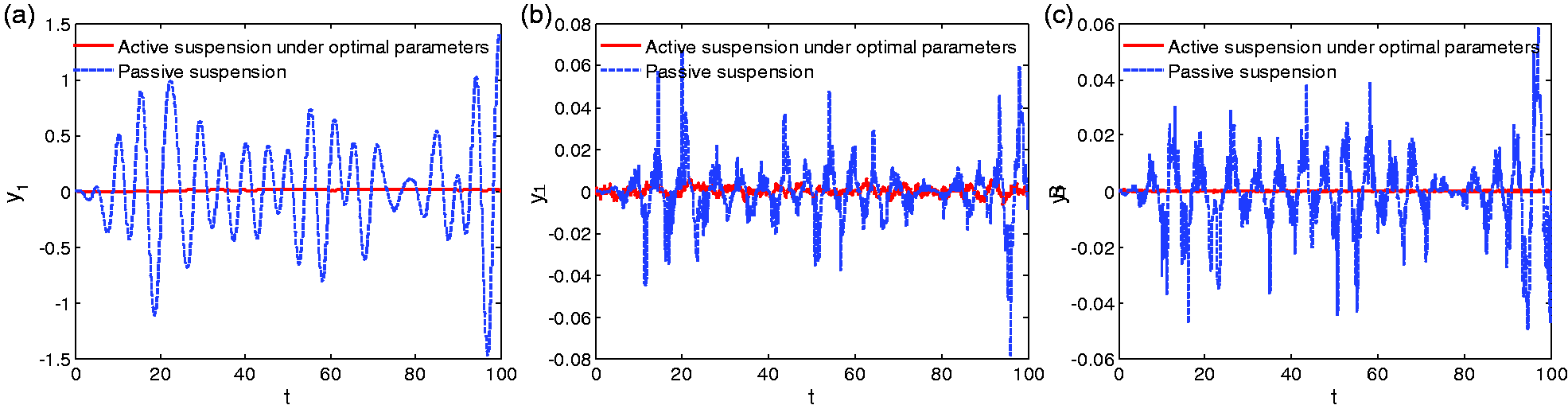
Comparison diagram of vehicle body response under random excitation. (a) Displacement of the vehicle body; (b) Velocity of the vehicle body; (c) Acceleration of the vehicle body.
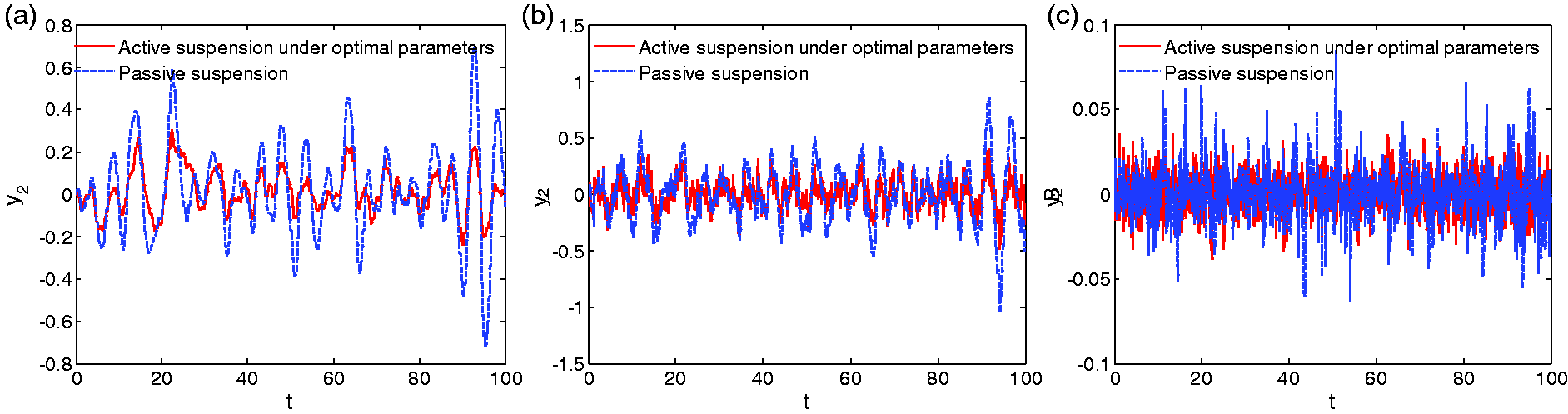
Comparison diagram of tire response under random excitation. (a) Displacement of the tire; (b) Velocity of the tire; (c) Acceleration of the tire.
Body response value.

RMS: root mean square.
Tire response value.

RMS: root mean square.
As can be seen from Figures 6 and 7, the vehicle body and tire vibration of the active suspension system with optimal parameters time-delayed feedback control are significantly reduced. Tables 3 and 4 show that, compared with the uncontrolled passive suspension system, the RMS value of vehicle body displacement, velocity, and acceleration is decreased by about 97.69%, 76.32%, and 98.14%, respectively, and the RMS value of tire displacement, velocity, and acceleration is decreased by about 51.09%, 39.94%, and 14.00%, respectively. Through the above data analysis, it is shown that the time-delayed feedback control also has a better vibration reduction effect for random road excitation, which is particularly obvious for the amplitude of body displacement and acceleration.
Conclusion
In this paper, the time-delay vibration reduction technique is applied to nonlinear suspension system. The effect of feedback gain and time-delay on vibration reduction of suspension system with external excitation is studied. The optimal control parameters are obtained. Finally, the correctness of theoretical analysis is verified by numerical simulation. The main conclusions are as follows: (1) The multiple-scales method is used to obtain the stability conditions of nonlinear systems with time delay, which are related to feedback gain and time delay. (2) For the specific feedback gain coefficient, the time delay can be adjusted to reduce the vibration of the system, and there is a minimum point to make the best vibration reduction effect. (3) Under the premise of ensuring the stability of the system, the optimal feedback parameters are obtained. Through numerical simulation and data analysis, it is found that the time-delayed feedback control under harmonic excitation and random excitation has better effect on vibration reduction of suspension system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (Grant No. 51275280).