
Abstract
The effects of gender, stature, and body mass on the biodynamic response of supine humans during transport are presented in this work. Twelve female and 14 male subjects were strapped to a litter and spine board and transported in a military ground ambulance that was driven on a track ranging from smooth to bumpy conditions. Female subjects showed more pelvis vertical motion, less pelvis roll, and more pelvis pitch (p < 0.05 for most conditions) than male subjects. Subjects with higher body mass showed less pelvis vertical motion, more torso roll, more pelvis roll, and more torso pitch than subjects with lower body mass (p < 0.05 for some conditions). Differences were also seen among subjects with different statures but were not as significant. The subjects showed softening and stiffening behavior across the different road-sections with different vibration magnitudes and the results will be investigated in detail in future work.
Introduction
In prehospital en route care, patients with suspected spinal cord injuries are traditionally immobilized to a litter and spine board system and transported via ground or air vehicles. During handling and transport, patients can be exposed to different types of forces, including vehicle shock and whole-body vibration (WBV). Depending on their severity, these forces can generate involuntary repetitive movements that can induce discomfort and lead to pain and secondary injuries.1–4 Previous studies showed that the level of discomfort increased when the intensity of the repetitive movements increased. 5 Animal studies have shown that WBV can induce pain, exacerbate injury, and cause damage at the cellular level.6,7 Carchietti et al. 8 conducted a study on human subjects during helicopter transport and concluded that the level of vibration transmitted to the patient may cause bleeding in unstable bone fractures, such as those involving the pelvis. DeShaw and Rahmatalla showed that repetitive involuntary movements under WBV can cause discomfort at different locations on the human body, with more intense discomfort at the cervical and lumbar areas, 9 and that the level of discomfort was proportional to the intensity of the motion.10,11 These studies illustrate the potentially adverse physiologic effects of involuntary repetitive movements as a result of WBV.
Studies on human response to vibration have shown that gender, body mass, and anthropometry can play a role in how the human body responds to vibration.12–16 Dewangan et al. 12 showed that the apparent mass (AM) demonstrated important gender differences and found that the major peak in the AM was higher for male subjects than for female subjects. They also suggested that fat as a damping material will absorb more energy than muscles and be less affected by the vibration magnitude. Using the absorbed power (AP), Lundström et al. 17 found a strong relationship between AP and body mass and gender. When the AP was scaled by the body mass, the results showed that the mass of the person is a major parameter when compared to other parameters. This is consistent with the finding in the literature using the AM and driving point impedance.12,18,19 Lundström et al. 17 also found that the peak frequencies in AP for female subjects were lower than for male subjects and that female subjects seemed to absorb more power than male subjects. The latter could be related to the body structure and the percentage of fat in their bodies. 12 Lundström et al. 17 also suggested a need for differentiated guidelines for female and male subjects but were hindered by the limited number of subjects they tested.
While many studies have been conducted to understand the effect of WBV on the biodynamics response of humans in seated and standing positions, very little work has been conducted on supine positions, such as those in the area of prehospital transport or in sleeping berths in trains.10,11,20,21 The authors of this work are unaware of any study that investigated the effect of gender, body mass, and stature in supine position under WBV. Another important factor that has been ignored in the literature is the effect of human body-segment geometry and connectivity on the related rotational motions of the body during WBV. These types of motion cannot be captured very well by conducting measurements using a certain translational axis. Although work has been done to investigate the effect of rotational input motion on the biodynamics of seated and standing subjects in WBV,22,23 no work has been done to investigate the effect of these rotational vibrations on the biodynamics response of humans due to gender, stature, and body mass. The effects of the rotational motions of the body segments can play important roles in human safety and wellbeing. Previous studies9,24 showed that human discomfort is more strongly related to the rotational motions and angular velocities than acceleration, which is a very important factor when designing transport systems for en route care, for example.
The purpose of the current study is to investigate the effect of the gender, body mass, and stature of a human in the supine position under WBV with special emphasis on the effect of body-segment geometry on the resulting rotational motions of these segments. Field data under road conditions, similar to a certain degree to those taking place in real-life scenarios with extremely rough conditions such as medical evacuations in theatre, are used in this work, and acceleration-based and angular-velocity-based transmissibility analyses are performed. The first part of this article will be devoted to the methodology section, which begins with biological information followed by experimentation, analysis, and results. The article ends with the discussion and conclusions sections.
Methods
Biological information
Twenty-six subjects participated in the field testing: 14 males and 12 females. The average body mass of all subjects was 81.9 kg (15.6 kg) and the average height was 1.731 m (0.082 m). For the male subjects, the average body mass and average height were 90.2 kg (13.6 kg) and 1.777 m (0.066 m), respectively, and for the female subjects, the average body mass and average height were 72.2 kg (12.0 kg) and 1.678 m (0.064 m), respectively. All subjects were healthy and reported no musculoskeletal conditions. In this paper, subjects who were taller than the average height are called “tall,” and those who were shorter than the average are called “short.” Also, subjects who had a heavier body mass than the average are called “heavy,” and those who had a lighter body mass than the average are called “light.”
Experiments
The human subjects were immobilized while lying on a spine board that was then placed on a standard U.S. Army Decontaminable litter. The subjects were transported in an M997 High Mobility Multipurpose Wheeled Vehicle ground ambulance, which moved at different speeds on a test course that simulated real-life transport conditions. Figure 1(a) shows how the subjects were immobilized in the ground ambulance, while Figure 1(b) shows a picture of the ambulance on the track. The testing was conducted at Lovelace Respiratory Research Institute in Albuquerque, NM, and data were collected by US Army Aeromedical Research Lab personnel. There were seven combinations of track sections and vehicle speeds: (i) gravel surface, (ii) outside bumpy, (iii) inside smooth at 16.09 km/h, (iv) inside bumpy, (v) inside smooth at 24.14 km/h, (vi) half straddle, and (vii) shocks using half rounds. Table 1 shows the road sections’ specifications, speed, time for data collection, and the root mean square (RMS) of the acceleration at each road section. The “bumpy” tracks are non-periodic rough tracks meant to simulate an approximately two-inch RMS average ride roughness. “Straddle” indicates that the tires of one side of the vehicle are on one track and the other tires are on another track at the same time, either straddling both bumpy tracks or one bumpy track and the smooth shoulder beside the bumpy tracks (half straddle). “Half-round” refers to a steel pipe embedded in the concrete, with a six-inch rise, that creates a significant mechanical shock when driven over. Following each pass on the track, the subjects were given a ride comfort survey.
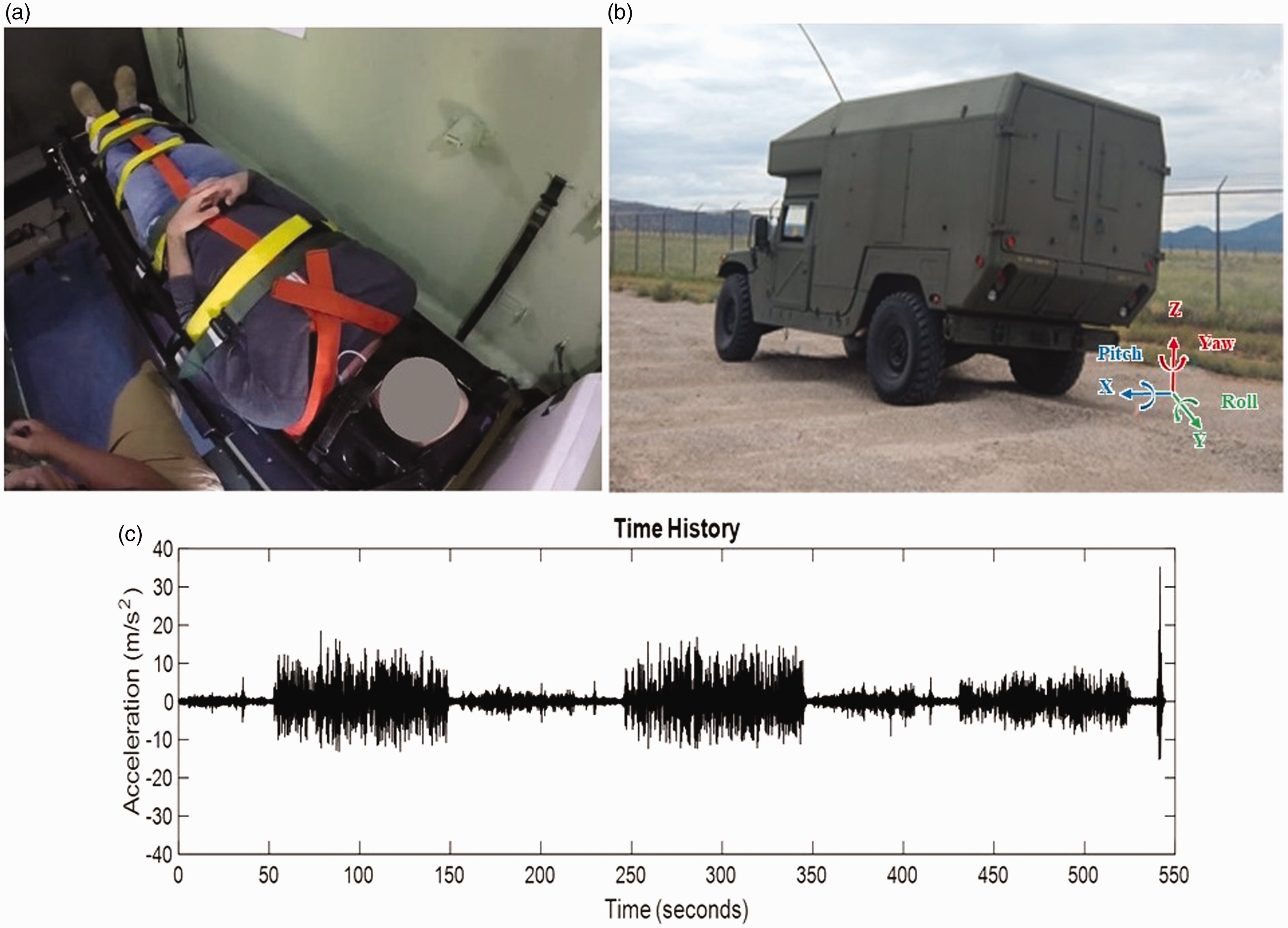
(a) Subject secured in the ground ambulance, (b) ambulance on track (straddling bumpy tracks), and (c) time history profile of the vertical acceleration at the vehicle floor for Sub-25.
Track section conditions.
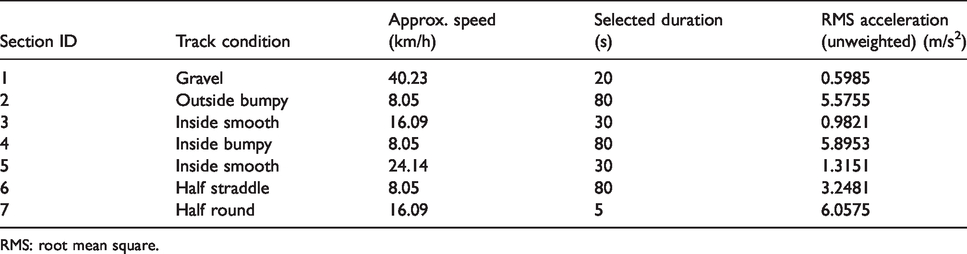
RMS: root mean square.
Data collection and analysis
Five six-degree-of-freedom inertial sensors (Dytran Instruments, Inc., Chatsworth, CA, USA) were used to measure the linear accelerations and rotational velocities at the vehicle floor, the spine board, and the head, chest, pelvis, and knee of the participants. The sensors were adhered to the human body using double-sided tape and were secured by banded strips of athletic and medical tapes. Two data acquisition (DAQ) systems (Crystal Instruments CoCo-90 Dynamic Signal Analyzers) recorded motion data from the sensors at a rate of 500 samples per second. Data streams from the two DAQs were synchronized using a common step wave signal. The collected data were exported to a laptop computer, then trimmed and post-processed using a low-pass filter at 40 Hz. Using Sub-25 as an example, the overall time history of the vertical acceleration of the vehicle is given in Figure 1(c). It is clear from Figure 1(c) that there are seven vibration segments. From this overall time history, each track section is extracted based on the selected duration given in Table 1. The average power spectral density of the vertical acceleration at the vehicle for each section is plotted in Figure 2.
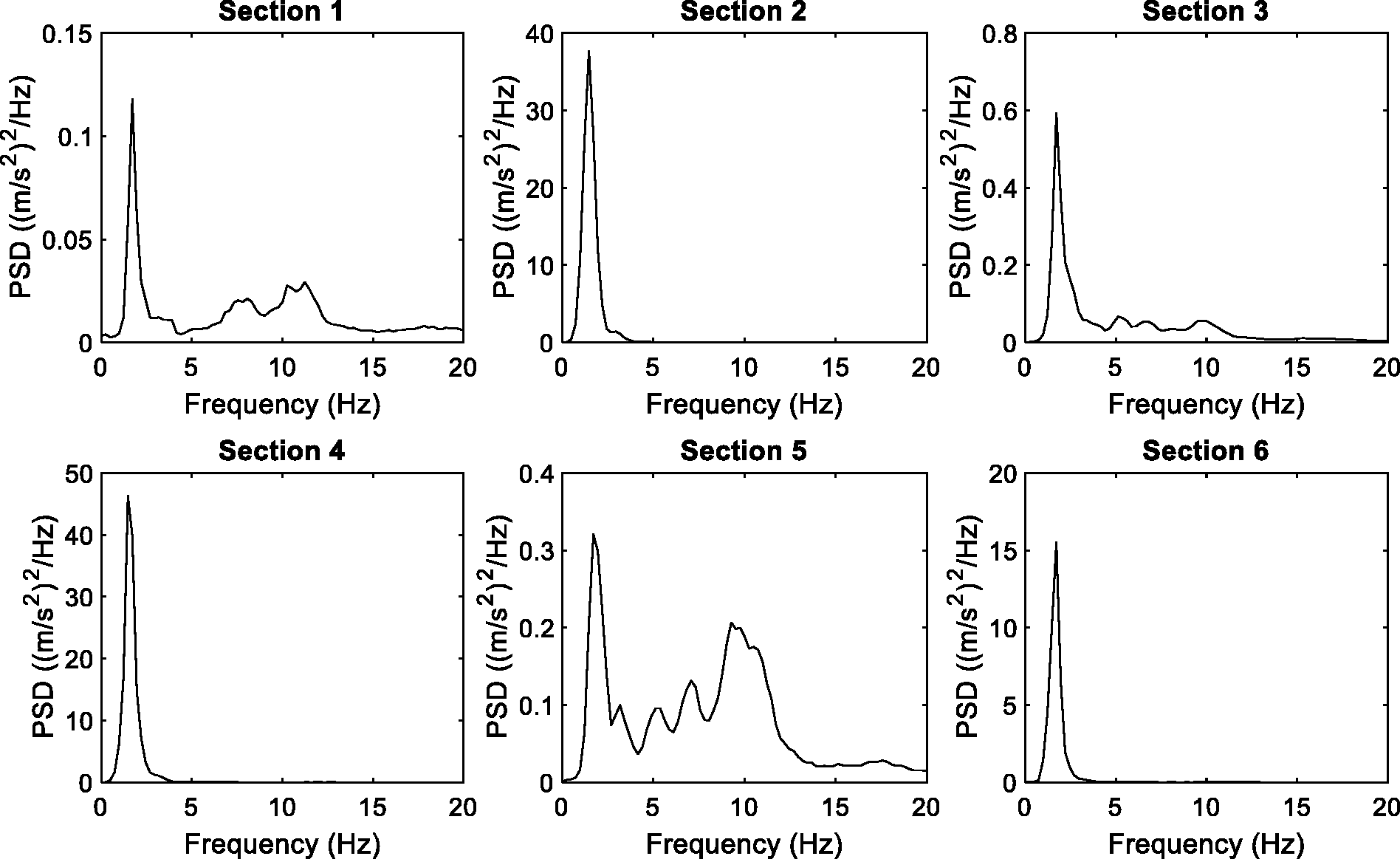
Average vertical acceleration power spectral density (PSD) across all the subjects at the vehicle floor for Sections 1–6.
Analysis
Two types of analysis were used in this work to differentiate between the biodynamics responses of the different subjects under the input WBV. Due to technical problems, the data collected for Section 7 and from the sensor on the spine board will not be used in the analysis. Using the Welch’s unequal variances t-test, statistically significant differences were defined as the 95% confidence interval of the difference between the two means, which in all cases corresponded to p < 0.05.
Transmissibility
The transmissibility function is a transfer function that correlates the output motion on a certain location on the human body with the input motion at the interface between the body and the supporting surface. Two types of transmissibility functions will be considered in this work: acceleration-based transmissibility, which uses the linear acceleration as the motion metric, and angular-velocity-based transmissibility, which uses the angular velocity as the motion metric.
Integral of the area under transmissibility
The difference between the transmissibility graphs at certain frequencies could be used as a metric to differentiate between the signals. When the transmissibility graphs show many fluctuations due to low input energy at certain frequencies, as is the case with field data, the comparison between the transmissibility signals becomes a challenging task. Therefore, the area under the transmissibility graph, which encompasses the energy through the body25–27 of different frequencies, will be used in this work as another comparison metric between different signals. The area under the transmissibility graph can be calculated using a numerical integration method such as the trapezoidal method.
Results
Acceleration-based transmissibility
Figure 3 shows the averages of the vertical transmissibility function of all subjects at the head, torso, and pelvis, with respect to the input vertical motion at the vehicle floor in Section 1 of the road track. The vertical axis here is defined with respect to the vehicle’s global axes: the x-axis is from the front to the rear of the vehicle, the y-axis is from side to side, and the z-axis is from the tires to the roof. The graphs in the left column of Figure 3 present the information for the male and female subjects, while the middle and right columns present the information for the tall and short subjects and the heavy and light subjects, respectively. It is evident from Figure 3 that the trends in the transmissibility graphs are similar to some extent; however, the magnitudes and locations of the peak frequencies are shifted for the different subjects. For example, the peaks at the torso and pelvis are shifted to the left for the female subjects and show lower magnitude at the torso and larger magnitude at the pelvis than for the male subjects. The peak around 6 Hz could be related to the resonance of the immobilization system.
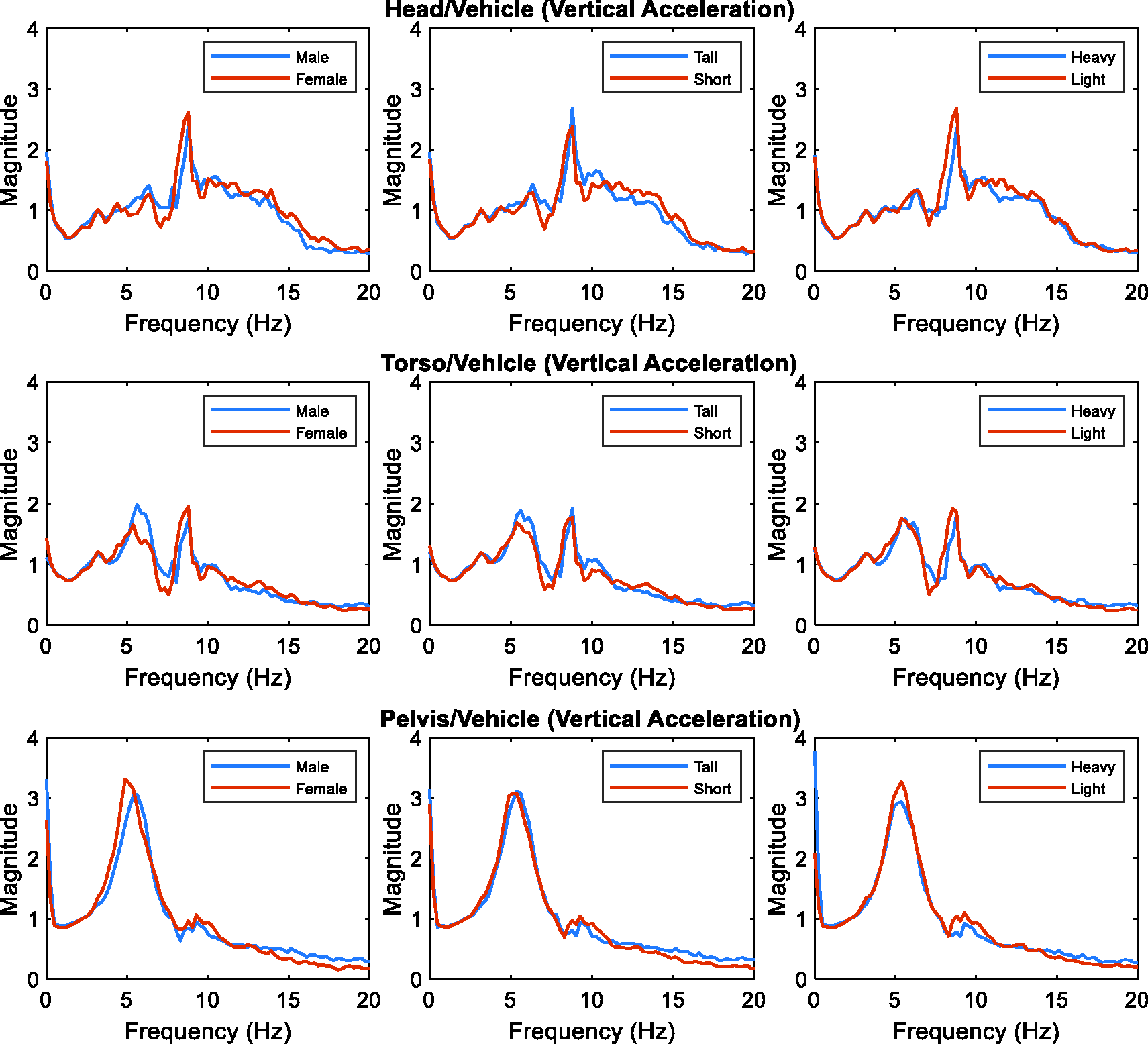
The transmissibility at the head, torso, and pelvis under vertical acceleration sorted by gender, stature, and body mass for Section 1 (gravel).
Integral of acceleration-based transmissibility
In this section, the area under the transmissibility graph is calculated using numerical integration techniques. While the transmissibility can be considered as the energy through the body, the area under the transmissibility graph may give an indication of the total energy through the body across the frequencies. That total energy may give an indication of the severity of the body motion in that direction, the vertical direction in this case. Due to the low energy in the input motion at higher frequencies, the area between 0.5 and 10 Hz will be considered in the calculation. The mean and standard deviation of the calculated areas for the different subjects across the first six road conditions (listed in Table 1) are used for the comparison between the responses of the different subjects. Figure 4 shows the results of the vertical acceleration at the head, torso, and pelvis for the male, female, tall, short, heavy, and light subjects, while Table 2 shows the p-values, with statistically significant values (p < 0.05) for the different sections in Figure 4. Table 2 also shows, between parentheses, the values where p < 0.1; other statistically insignificant p-values are not shown in Table 2.
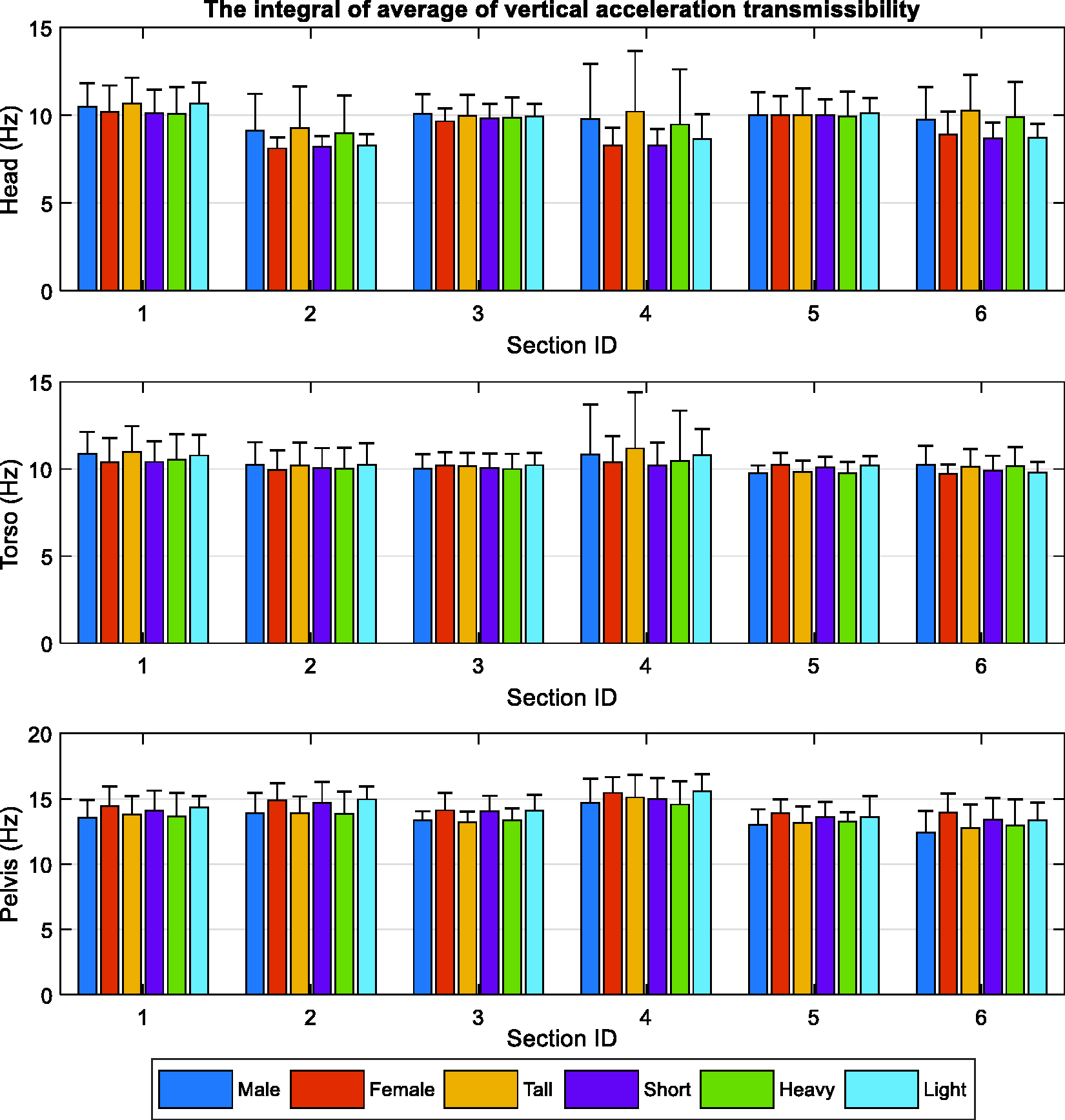
The integrals of the acceleration-based transmissibility of the subjects grouped by gender, stature, and body mass for the different road sections in the vertical direction.
p-Value test for the integrals of average vertical acceleration for all sections at the head, torso, and pelvis for the subjects, grouped by males (M), females (F), tall (T), short (S), heavy (H), and light (L).
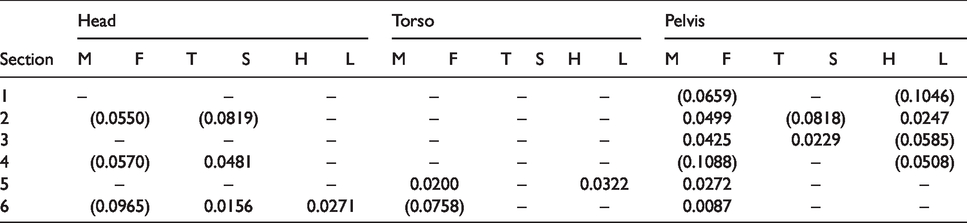
Figure 4 and Table 2 show that the male subjects experienced more head motion than the female subjects (p = (0.0550 – 0.0965)) in Sections 2, 4, and 6, where the acceleration magnitude was relatively higher than the other sections. The taller subjects showed more head motion than the shorter subjects in Sections 4 and 6 (p = (0.0156 – 0.0481)) and Section 2 (p = 0.0819). At the torso, the subjects with heavy body mass showed less motion than the subjects with light body mass in Section 5 (p = 0.0322). In addition, the female subjects showed more pelvis motion than the male subjects in Sections 2, 3, 5, and 6 (p = (0.0087 – 0.0499)), as well as in Section 1 (p = 0.0659) and Section 4 (p = 0.1088). Subjects with heavy body mass showed less pelvis motion than subjects with light body mass in Sections 2 (p = 0.0247) and Sections 1, 3, and 5 (p = (0.0508 – 0.1046)).
Angular-velocity-based transmissibility
Figure 5 shows the angular-velocity-based transmissibility in the roll direction for all subjects at the head, torso, and pelvis for Section 2 of the road track, while Figure 6 shows the angular-velocity-based transmissibility of all subjects and their averages in the pitch direction at the head, torso, and pelvis relative to the vehicle for Section 2 of the road track. The graphs in both figures are less smooth than those in Figure 3, where the acceleration was used, and that makes the comparison process between the subjects during the different sections a challenging task.
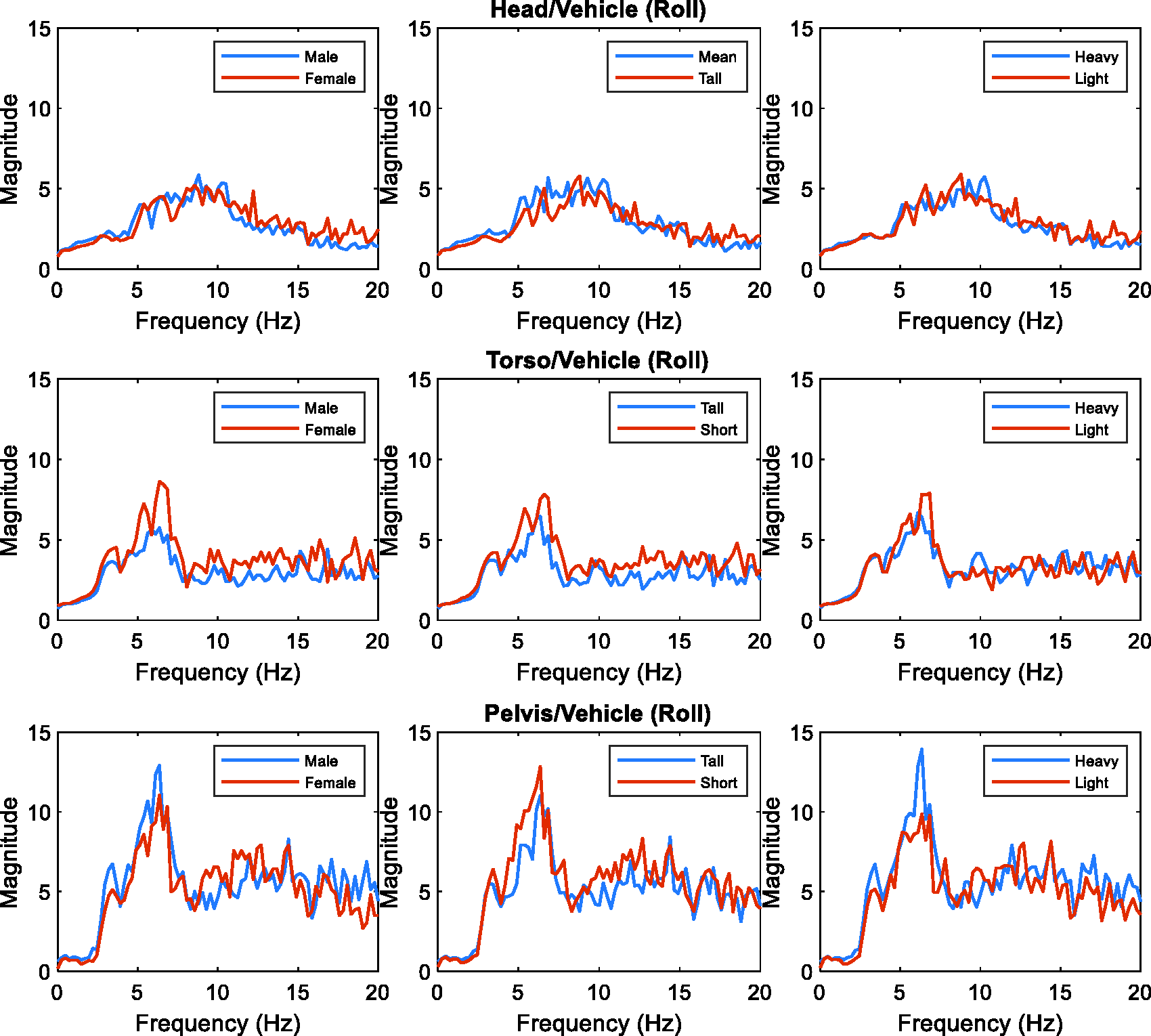
The angular-velocity-based transmissibility in the roll direction at the head, torso, and pelvis to the vehicle floor for Section 2 (outside bumpy).
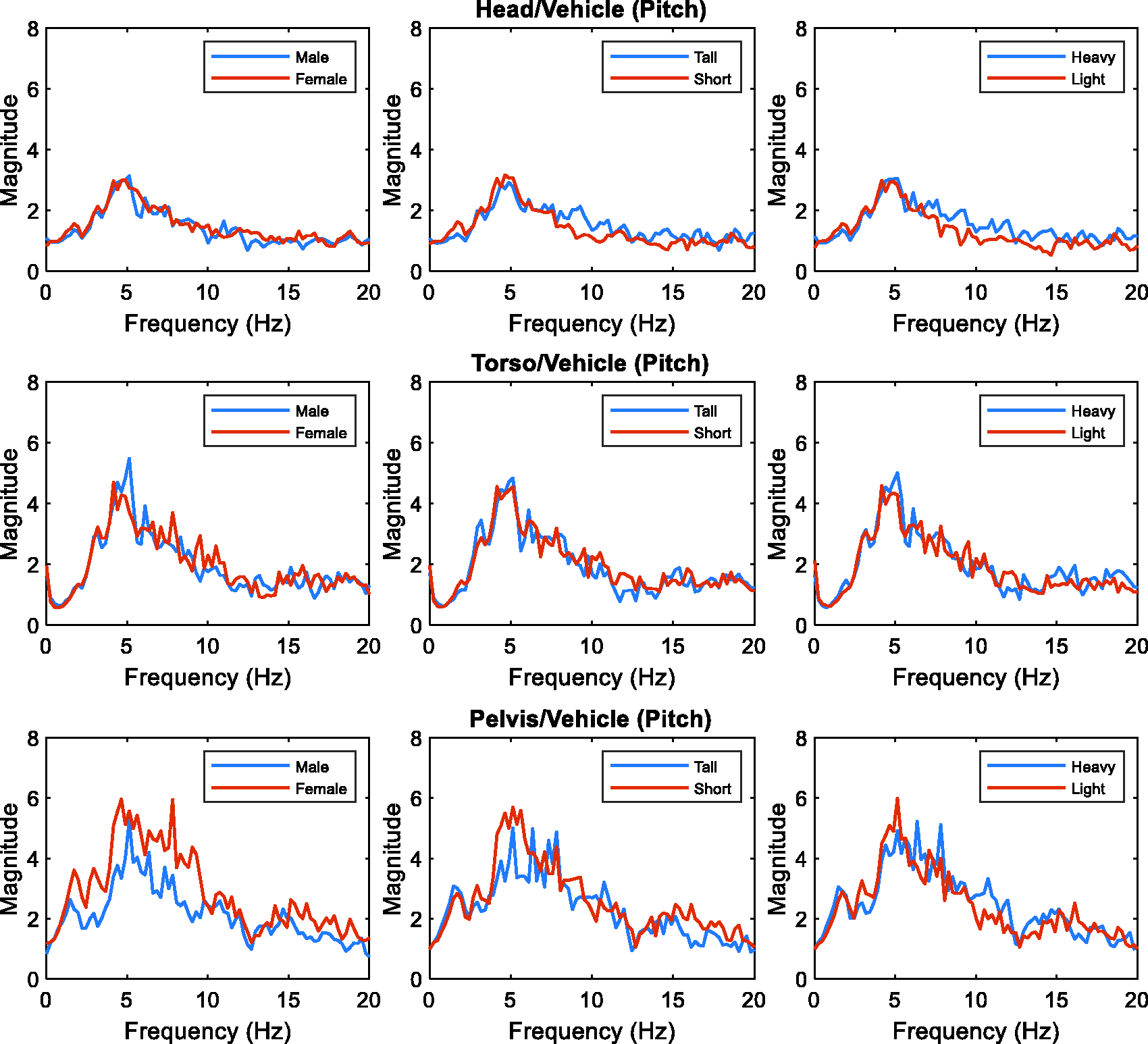
The angular-velocity-based transmissibility in the pitch direction of head, torso, and pelvis to vehicle floor for Section 2 (outside bumpy).
Integral of angular-velocity-based transmissibility
The data spectrum analyses of the angular-velocity-based transmissibility showed similar characteristics to the acceleration-based transmissibility in terms of the power distribution across the frequencies where most energy was concentrated in the range below 10 Hz. The mean and standard deviation of the calculated areas for the different subjects across the six road conditions (shown in Table 1) are used for the comparison of the different cases. Figure 7 shows the results of the area under the angular-velocity-based transmissibility graphs in the roll direction at the head, torso, and pelvis of the male, female, tall, short, heavy, and light subjects, while Figure 8 shows the same information for the pitch direction. While the area under the acceleration-based transmissibility may give an idea of the severity of motion in the vertical direction, the area under the velocity-based transmissibility may give an idea of the severity of motion in the angular directions.
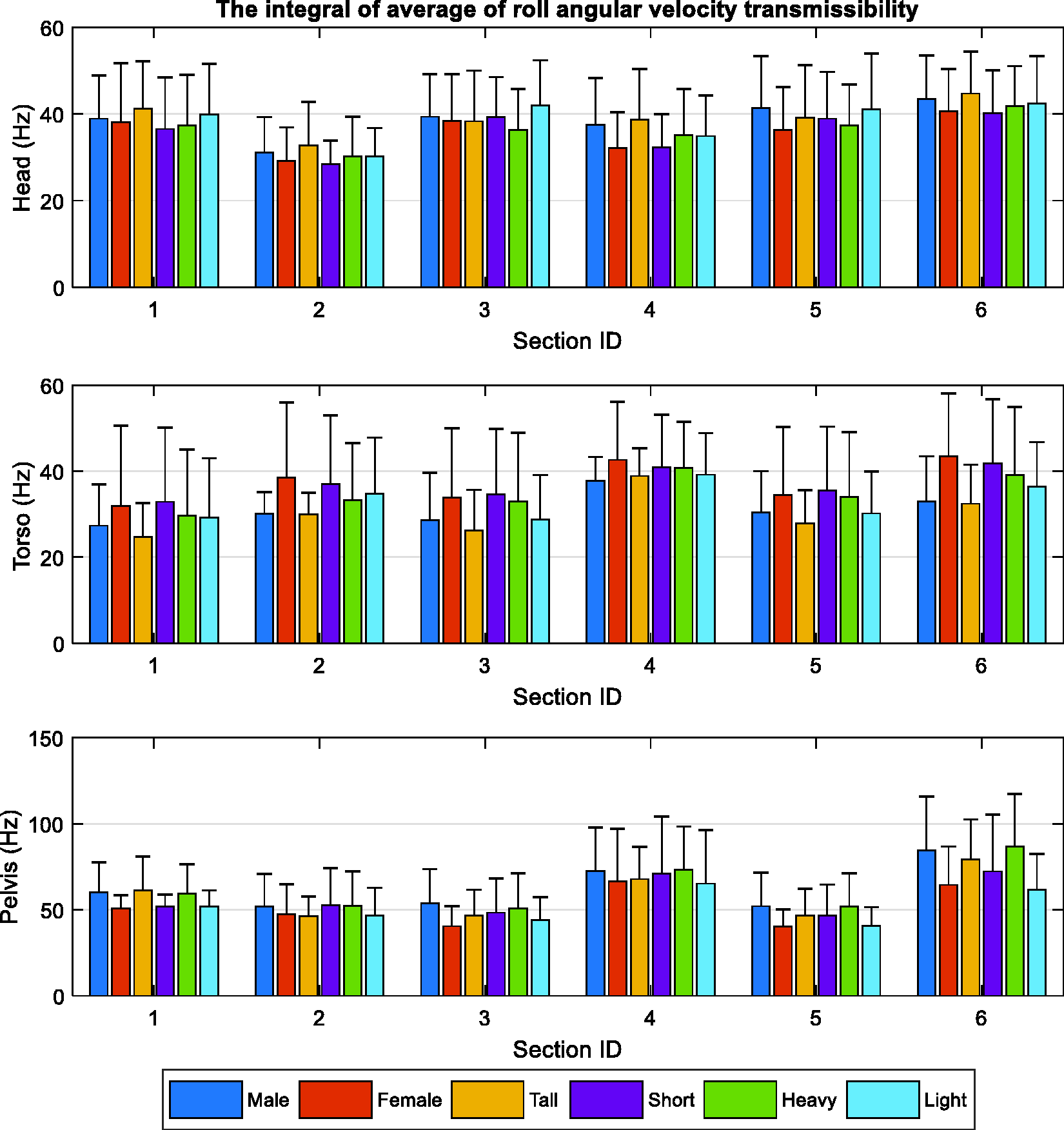
The integrals of the average of angular-velocity-based transmissibility of subjects grouped by gender, height, and body mass for all sections for the roll direction.
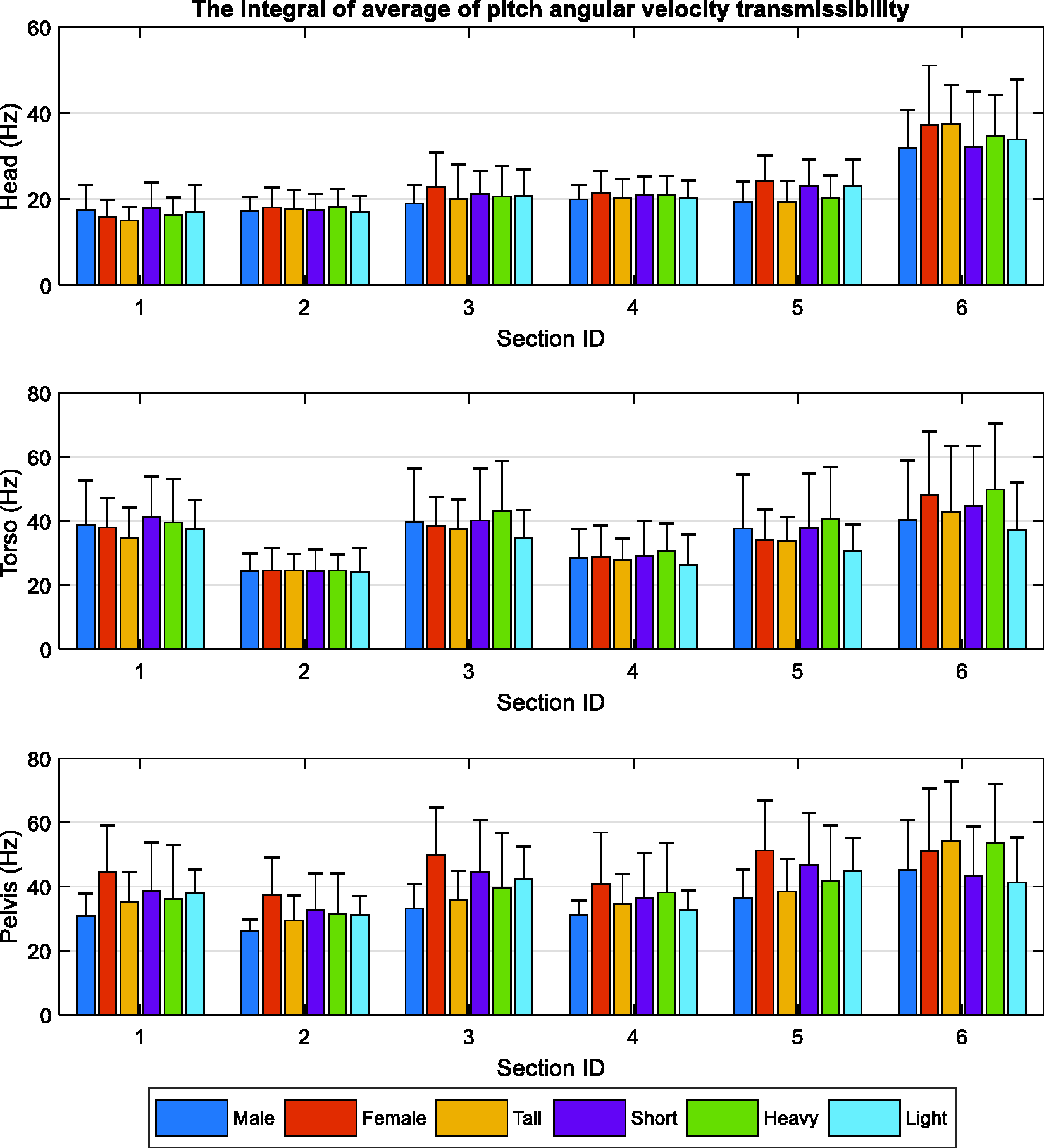
The integrals of the average of angular-velocity-based transmissibility of the subjects grouped by gender, height, and body mass for all sections at the Y-direction (pitch).
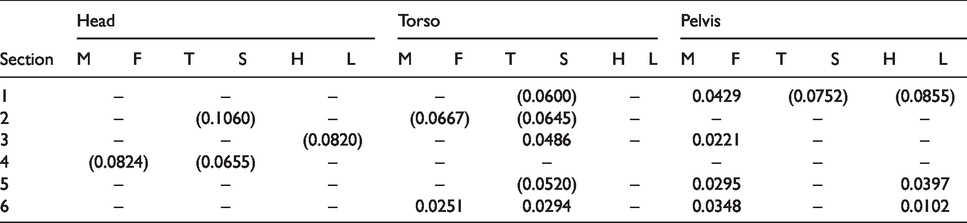
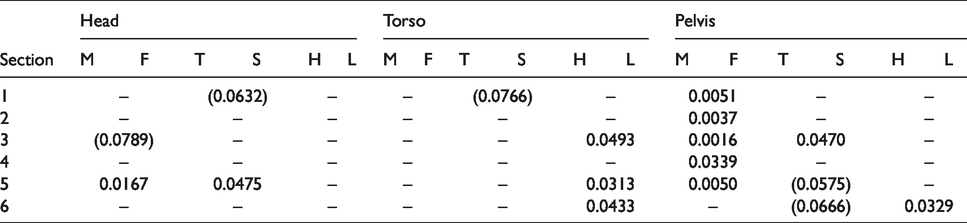
Table 3 shows the p-value of the roll direction for the different sections at the head, torso, and pelvis for the different subjects, while Table 4 shows the p-value for the pitch direction for the same information.
p-Value test for the integrals of the average of roll angular velocity for all sections grouped by males (M), females (F), tall (T), short (S), heavy (H), and light (L).
p-Value test for the integrals of the average of pitch angular velocity for all sections grouped by males (M), females (F), tall (T), short (S), heavy (H), and light (L).
As shown in Figure 7 and Table 3, taller subjects showed less torso roll motion than shorter subjects in Sections 3 and 6 (p = (0.0294 – 0.0486)) and Sections 1, 2, and 5 (p = (0.0520 – 0.0645)). At the pelvis, female subjects showed less roll motion than male subjects (p = (0.0221 – 0.0429)) in Sections 1, 3, 5, and 6. Moreover, the subjects with heavy body mass showed more pelvis-roll motion than subjects with light body mass in Sections 5 and 6 (p = (0.0102 – 0.0397)) and Section 1 (p = 0.0855).
As shown in Figure 8 and Table 4, subjects with heavy body mass showed more torso pitch motion than subjects with light body mass in Sections 3, 5, and 6 (p = (0.0313 – 0.0493)). At the pelvis, female subjects showed more pitch motion than male subjects (p = (0.0016 – 0.0339)) except in Section 6. Tall subjects showed less pelvis-pitch motion than short subjects in Section 3 (p =0.0470) and Section 5 (p =0.0575). However, tall subjects showed more pelvis-pitch motion than short subjects (p = 0.0666) in Section 6.
Discussion
This study quantified the involuntary repetitive movements of subjects with different genders, statures, and body masses across several anatomical regions while they were immobilized in a supine position and transported in a military ground ambulance across tracks with different ride profiles. In general, the results showed that gender, mass, and stature can play a major role in the biodynamics response of supine subjects, which is consistent with the findings in seated and standing subjects.12,14,16 Specifically, the results showed a strong relationship between the geometry of the body segments and the resulting rotational motions of these segments across genders, stature, and body mass. The investigation of the rotational motions can play an important role in the advancement of immobilization systems in WBV, as most immobilization systems are designed to be effective in the translational vertical direction but are not as effective against rotations.
While the traditional way to compare the biodynamics responses of different cases in WBV is to use transfer functions to investigate what is happening at their major peak frequencies in terms of magnitude and shift in the frequency,12,13,17 in this work, the results were presented and investigated in terms of the major peak frequency and the area under the transmissibility graphs constructed from the translational and rotational input and output motions. The area under the transmissibility graphs was used in this work because the transmissibility data were in general noisy, especially for the rotational data, with many close peaks appearing at certain frequencies, which made the process of focusing on certain peaks a challenge. One way to circumvent this issue could be to consider the average of a range of frequencies around the peak frequencies. This process may introduce some subjective preferences and unintended errors. Therefore, the results of this work will be discussed in terms of the peak frequencies when there are clear differences. Otherwise, the results will be discussed in terms of the area under the curve as an objective way to evaluate and compare the different cases.
It has been demonstrated that different road sections generate input vibration to the vehicle with different magnitudes, and that is expected to introduce a softening behavior to the biodynamical response of the subjects due to nonlinearity.28–31 However, the response of the subjects in this work varied between softening during some sections and stiffening during other sections. This is a very interesting phenomenon that has not been seen in previous publications, and therefore the authors have decided to conduct a thorough investigation and present the findings in future publications. The magnitude of the input vibration and the inter-subject variability has also created some uncertainty in deciding if there is a significant difference between some cases. This can happen when the magnitudes of the subjects’ average have comparable values and when the standard deviations are relatively high. A situation like this can be seen in the torso roll in Section 4 (Figure 7). In this case, finding meaningful statistical differences between any two conditions, such as males versus females or tall versus short, becomes very hard. Therefore, the p-value for such cases was left blank (Table 3).
One limitation of this work is that the data from the sensor at the interface between the subjects and the immobilization system was corrupted, and therefore, the input motion was based on the litter berth surface instead of the interface between the subjects and the immobilization systems. In this case, the output acceleration signal on the subject would represent the combined response of the subject and the immobilization system. However, because all subjects were secured on the same system in a similar manner, the authors believe that the combined responses have yielded reasonable results regarding the differences between various situations. What has been said for the acceleration signal may not apply to the angular velocity input motion, however, as the angular motion at the interface is very similar for the subject and the immobilization system because they move together. Therefore, it may make more sense to use the angular velocity of the vehicle as the input motion to the system instead of the data at the interface. Another issue is that some subjects have wide shoulders, which may restrain the movement of their torsos in the rolling direction. When the shoulders are wide enough to span both litter poles, they may arrest the rolling motion (Figure 1(a)). It should also be noted that subjects were attached to a relatively rigid spine board with molded runners. Heavier subjects pressed those runners deeper into the compressible mesh fabric of the litter, providing more “cradling” of the spine board and perhaps arresting rolling motions.
Effect of gender
The results demonstrated that the transmissibility of the pelvis for the female and male subjects (Figure 3) showed two dominant peak frequencies around 5 and 10 Hz. These peaks are similar to what would normally be seen from lab experimentation and mathematical modeling behavior.19,24,32–36 Figure 3 shows that the peak frequency of the pelvis of the female subjects is larger than that of the male subjects and was shifted to the left. This is similar to the finding 17 in seated subjects when studying AP. Also, Dewangan et al. 12 reported that males showed higher frequency than females but with comparable magnitude using the AM. Interestingly, the shapes of transmissibility graphs at the pelvis of the supine subjects for females and males are similar to those of the AP for seated subjects; both demonstrate a large peak at 5 Hz and a smaller peak around 10 Hz. It is very interesting to see that human models32–36 have also predicted two peaks at similar locations. The area under the vertical-acceleration-based transmissibility results shows that female subjects, in general, experienced higher vertical translational movements than male subjects; this could also be attributed to the body mass of the subjects (Section “Biological information”), as the average mass of female subjects was less than that of male subjects. These results are consistent with the finding in the literature that heavier subjects generate less motion under WBV. 13
In terms of the rotational angular velocities, the female subjects showed more pelvis pitch and less pelvis roll than male subjects. This could be related to the anatomy and the geometry of the pelvis, as females have a wider and shorter pelvis.37–39 Figure 5 shows that the female subjects had a lower peak at 6 Hz for the pelvis roll and higher peaks at the torso between 6–7 Hz. Also, in Figure 6, the female subjects showed higher peaks between 6–10 Hz than the male subjects for the pelvis pitch. In Figure 7, the female subjects showed more torso roll; although it was statistically insignificant across several sections, it was statistically significant for Sections 4 and 6 where relatively extensive rotational input vibration exists (Table 1). Another contributing factor for the higher torso rolling in females could be that females have narrower shoulders than males.38,39 Narrow shoulders can keep the body from touching the litter poles that can obstruct rolling motions to some extent.
At the head, the female subjects experienced less translational vertical vibration than the males, especially at the bumpy segments of the road in Sections 2, 4, and 6 where higher translational and rotational accelerations exist. Again, this can be attributed to the anatomy, where females’ heads are lighter than males’ heads.38,39 As for rotational motions, the female subjects demonstrated higher head-pitch motions than the male subjects. This could be because females have shorter faces/heads38,39 than male subjects. Although the female subjects have narrower heads, the results still showed lower head-roll motions when compared to males. While it was expected that females with narrower heads would generate more rolling motion, the side-head support may have played a role in changing the outcomes.
Effect of body mass
Heavy subjects with high body mass showed less vertical motion at the torso and pelvis than light subjects (Figure 3), which could be explained by more weight and damping. 13 In fact, this was seen with the naked eye in videos, where the lighter subjects bounced and slid around more than heavier subjects. This result is also consistent with the work of Dewangan et al., 12 where they found that the main parameter between the different subjects could be the mass of the subjects. The magnitude of the first peak of the pelvis around 6 Hz for the lighter subjects was higher than that of the heavy subjects, with the peak of the heavy subjects shifted slightly to the left. The difference for the torso roll was not as clear as for the pelvis.
In terms of rotation, the subjects with high body mass showed more torso roll (Figures 5 and 7). This could be because heavy subjects have a greater tendency to slide on the smooth surface of the spinal board. When that happened, they could move across the spinal board with angular and sliding motions. Although there is a chest strap, it may not have the capacity to hold them in position during this process. The heavy subjects showed more pelvis roll (Figures 5 and 7) and pelvis pitch (Figures 6 and 8) than the light subjects. This was clearer when the vehicle was moving across the sections that have large rotational input motions, as shown in Figure 1(b) where the vehicle was subjected to extensive rolling and pitching motions. Again, this could happen because the litter system is normally designed to encounter and mitigate vibration in the translational vertical direction and is expected to be less effective against rotational input motions. Also, as shown in Figure 1(a), there is one strap on the pelvis area, and that strap may not be effective in restricting the rotational motion of the pelvis.
At the head, the heavy subjects experienced less translational motion, which could be related to having heavier heads than the light subjects. The difference between head roll and pitch was not significant between the heavy and light subjects, and that can be again attributed to the effect of the head side supports.
Effect of stature
In terms of the vertical translational acceleration, the results showed that the differences in the peak frequencies were not as clear when comparing tall and short subjects. The data for the rotational transmissibility did show some differences at the peak frequencies. However, the rotational transmissibility data were noisy, with many peaks at certain frequencies, and therefore it was hard to see clear differences between the segments. The area under the vertical-acceleration-based transmissibility at the torso and pelvis showed comparable results for the tall and short subjects. This could be explained by the fact that some of the tall subjects were relatively heavy; it could also be due to the use of male and female subjects for the stature category. According to the angular-velocity-based transmissibility results, the tall subjects showed less torso roll, which may be explained by their anatomy; taller subjects normally have wider shoulders.38,39 Again, the wider shoulders could touch the litter poles (Figure 1(a)) and hinder rolling.
With the exception of Subject 6, the tall subjects showed less pelvis pitch than short subjects, which could be because they have longer pelvises.38,39 It could also be because the tall subjects were predominantly males with longer pelvises. The tall subjects in general had less pelvis roll than the short subjects, but it was statistically insignificant, or consistent, across all sections except for Section 1, where the road was smooth. The short subjects also showed more pelvis roll, although it was not significant, at Section 6 with the straddling motion. As for the head, the tall subjects demonstrated more rolling motion than the short subjects, but pitch motion was not consistent, which can be attributed to the head support.
Conclusions
This study highlighted the relationships between gender, stature, body mass, and body-segment geometry at the head, torso, and pelvis and the resulting motions of these segments during WBV. A person of larger mass, in general, will experience reduced vertical motion of the body segments but may be subject to increased torso and pelvis rotation. Female subjects showed more pelvis rotational and translational motions due to their anatomy and the geometry of their body segments. The stature of the subjects may affect the rolling motion of the torso, but that was not significant for most cases in this study, suggesting the need for future studies. Subjects with wider torsos could generate low roll motions. The results in general suggest that special care is needed when immobilizing patients of different genders and body mass, such as adding lateral supports to the chest and cross-body supports to the pelvis for people with spinal or pelvic injuries. While additional research may be required, different immobilization systems may be considered for people of different genders and varying body mass.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Battelle Memorial Institute (grant number W911NF-11-D-0001).