
Abstract
This work investigates the effect of the contact surfaces on the biomechanical response of supine humans during whole-body vibration and shocks. Twelve participants were exposed to three-dimensional random vibration and shocks and were tested with two types of contact surfaces: (i) litter only, and (ii) litter with spinal board. The two configurations were tested with and without body straps to secure the supine human. The addition of the spinal board reduced the involuntary motion of the supine humans in most directions. There were significant reductions in the relative vertical accelerations at the neck and torso areas, especially during shocks (p < 0.01). The inclusion of body straps with the spinal board was more effective in reducing the relative motion in most directions when shocks were presented. This study shows that the ergonomic design of the human transport system and the underlying contacting surfaces should be studied during dynamic transport environments.
Introduction
Severe vibrations and repeated shocks can transfer to the supine human during transportation through the contact surfaces of the transport system. 1 Common situations include transport with sleeping berths in trains and transport of people during emergency situations.2,3 It is expected that the mechanical properties of the contact surfaces will affect the resulting involuntary motion and the level of discomfort of the supine humans during transportation.4,5 The performance of most existing transport systems in dynamic settings is mostly overlooked, and the majority of the work that has been done in this area was performed during static or quasi-static conditions. The spinal board, for example, is traditionally used with the transport litter when transporting people with suspected spinal cord injuries. During emergencies with time constraints, however, the use of the spinal board may be disregarded, and people may be transported using the litter only. The effect of including the spinal board or other contact surfaces on the resulting involuntary motions of supine humans during vibration and shocks has not been thoroughly investigated in the literature.
Considerable work has been done to investigate the effect of the contact surfaces on the biodynamic response and discomfort of seated occupants.6–12 Mehta and Tewari 8 evaluated the effect of the material properties and thicknesses of the seat cushion on attenuating the vibration transmitted to the occupants at a frequency range of 1–8 Hz. They used nine commercial seat cushions and found that fewer vibrations were transmitted when using material composed of high-density polyurethane foam. Chen et al. 9 investigated the whole-body vibration (WBV) transmitted through the occupant's seat of 247 taxi drivers. They found that some taxi drivers used a surface cushion, mostly in vehicles that generate high vibration. The added seat cushion was not firmly attached to the vehicle's seat. The authors suggested that these drivers were using the seat cushion because it might reduce the transmitted vibration and discomfort from their vehicles. The same authors also found that the seat belt, among other parameters, had no significant effect on the measured low vibration magnitude (below 0.5 m/s 2 ). Beard and Griffin 10 showed that a seat cushion can increase the transmitted vibration at low frequencies (0.2–1.0 Hz) and can create a less comfortable situation when compared with a rigid seat. While it is expected that the rigid seat has more static discomfort compared to the seat with a cushion, the dynamic discomfort, as a result of motion, could outweigh that of the static discomfort.
There has been less research on the effect of contact surfaces on the biodynamic response and discomfort of supine humans during WBV than of humans in seated positions. Alberti et al. 1 showed that the transport litter's geometry and fabric play a significant role in mitigating the transmitted vertical vibration above 10 Hz although amplifying the vibration at lower frequencies. A comparison of WBV between a transport system with a rigid surface and another one with a spinal board strapped to a litter indicated that the latter had magnified the transmitted motion to the supine human in all directions by over 200% in the vertical direction around 5 Hz.4,13 It was found that the magnification at 5 Hz could be attributed to the resonance characteristics of the transport litter and the human body. Hachem 14 investigated the value of adding an air-bladder to the rigid surface of seats for seated positions and to the transport litters for supine positions. He found that the air-bladder reduced the vertical transmitted vibration by up to 47% in the seated positions; however, he had technical difficulties evaluating the effectiveness of the air-bladder for supine positions. DeShaw and Rahmatalla 5 presented a predictive model to evaluate the discomfort associated with supine humans during transport with WBV and shocks. They showed that discomfort is very well correlated with the root mean square (RMS) of the angular velocity at the neck and torso areas of the supine human. They also showed that lying on the spinal board strapped to a litter resulted in relatively high static ambient discomfort, but less dynamic discomfort depending on the vibration and shock input.
During supine transport, there is much uncertainty about the specific magnitude and locations of vibration and energy entering the human body from the contact surfaces beneath it. For the sake of analysis and to avoid such uncertainty, this work focuses on the resulting output motions that occur at the human-body segments and uses those as indicators of the response through the human body. For example, the relative motion between the head and chest provides insight into the severity of the distortion occurring at the neck region.5,15 Such information inferred from the relative motion can provide insights on the severity of the associated forces at the joint. The objective of this work is to demonstrate the effect of the contact surfaces on the supine humans' response as a result of the transmitted WBV. The resulting involuntary motions of the supine human at the neck and torso areas will be used as a measure to differentiate between the efficacy of the contact surfaces.
Methods
Participants
The participants for this study were 12 males with a mean and standard deviation for age of 22.2 ± 3.6 years, mean and standard deviation for height of 180.7 ± 6.4 cm, and mean and standard deviation for weight of 78.1 ± 10.5 kg. All participants were in good health and reported no musculoskeletal injuries. Written informed consent, as approved by the University of Iowa Institutional Review Board, was obtained prior to testing.
Experimental setup
The participants were exposed to 3D random vibration and shocks while they were lying in a supine position on a motion simulator. The participants were tested using two different types of contact surface: (i) transport litter only, and (ii) transport litter with spinal board. The two configurations were tested with and without applying body straps to secure the supine human. Figure 1(a) shows the litter-only configuration, while Figure 1(b) shows the litter with spinal board configuration. The litter (Talon II 90, North American Rescue, Greer, SC, USA) was rigidly fixed to a motion simulation table. Torso and leg straps were used to secure the participants to the litter for the configurations where straps were applied. The torso strap was placed at the bottom of the sternum, near the xiphoid process, and the leg strap was placed just above the kneecap. A strap tension of approximately 135 N (30 lbf) was adequate to ensure the participant's securement yet still comfortable.
Profiles of the supine-transport configuration investigated in this work: (a) litter only with straps, (b) litter and spinal board with straps.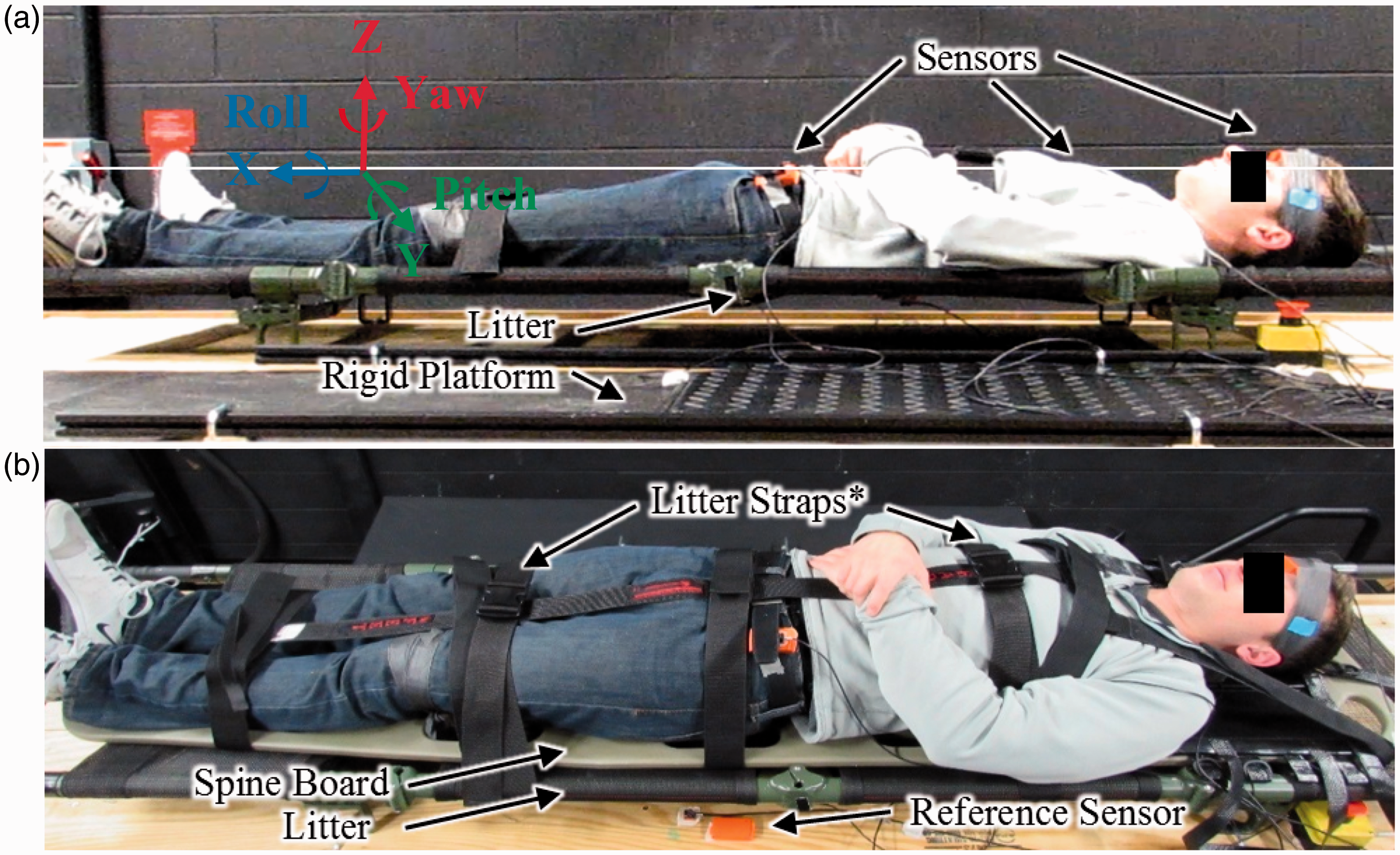
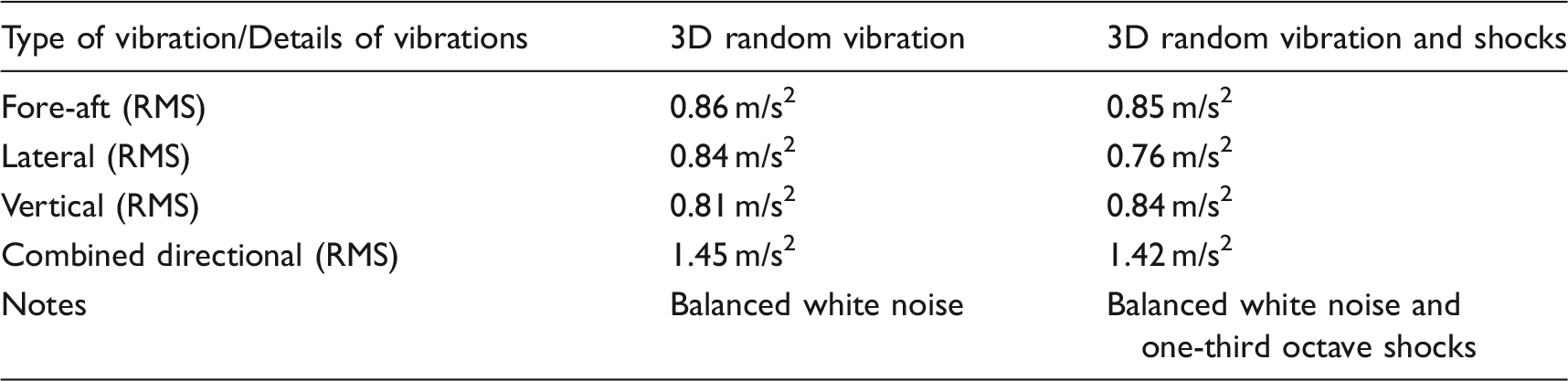
Contact surface configurations.
Three-dimensional vibration and shocks simulations
Ride profiles created for this study showing the components of the combined 3D directional rides.
Broadband vibrations provide a general test range and are expected to cover a larger range of human responses due to ground vehicle transport and even some lower frequencies in aerial transport. Each of the ride profiles (Table 2) was 60 s in length, and the testing simulations were presented in a randomized order for each participant. A six-degrees-of-freedom, man-rated motion platform was used to generate the vibration motion for the experiment (Moog-FCS628-1800 electrical motion system). The vibrational energy from each direction (fore-aft, lateral, and vertical) were not related and were random in nature. The system was able to generate the vibrations and shocks accurately in the three directions within 2% RMS acceleration error between trials.
The shock ride profiles were similar to the profiles used by Mansfield et al.
16
The shocks were random at unequal time intervals, had a crest factor of around 6.0 (Peak m/s
2
/ RMS m/s
2
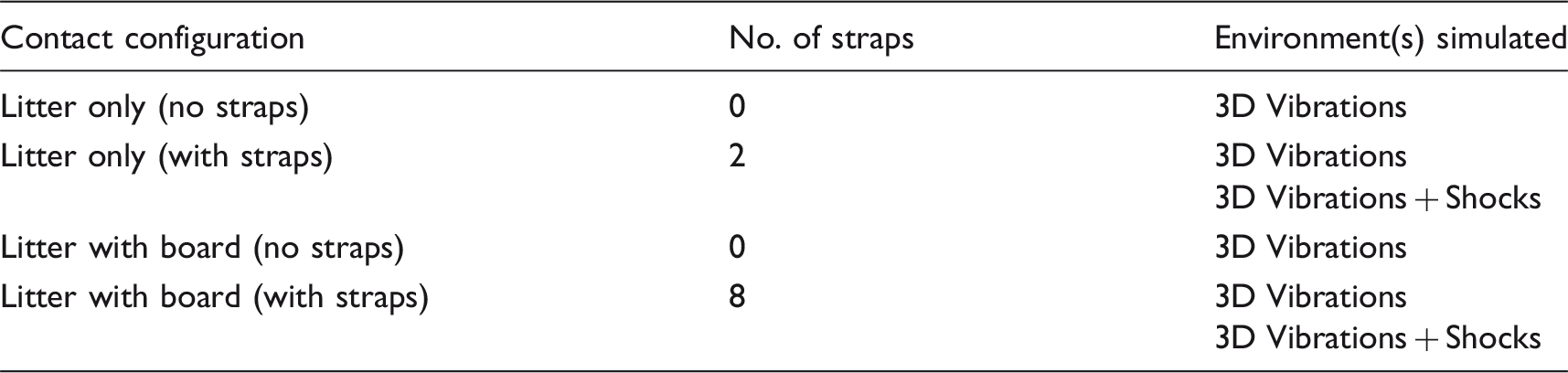
) and a damping coefficient of 0.4, and were located at one-third octave bands in the frequency range studied (1.25, 1.6, 2, 2.5, 3.15, 4, 5, 6.3, 8, 10, 12.5, 16, and 20 Hz). Each one-third octave band shock was introduced two times randomly during the 60-second vibration profile in each direction. The time history and spectrum of acceleration for the vibration and shock rides can be seen in Figure 2.
Time history profiles (a–c) and power spectral density (PSD) (d–f) of 3D vibration (black lines) and 3D vibration with shocks (green lines). Plots (a) and (d) show the fore-aft acceleration's component, plots (b) and (e) show the lateral acceleration's component, and plots (c) and (f) show the vertical acceleration's component.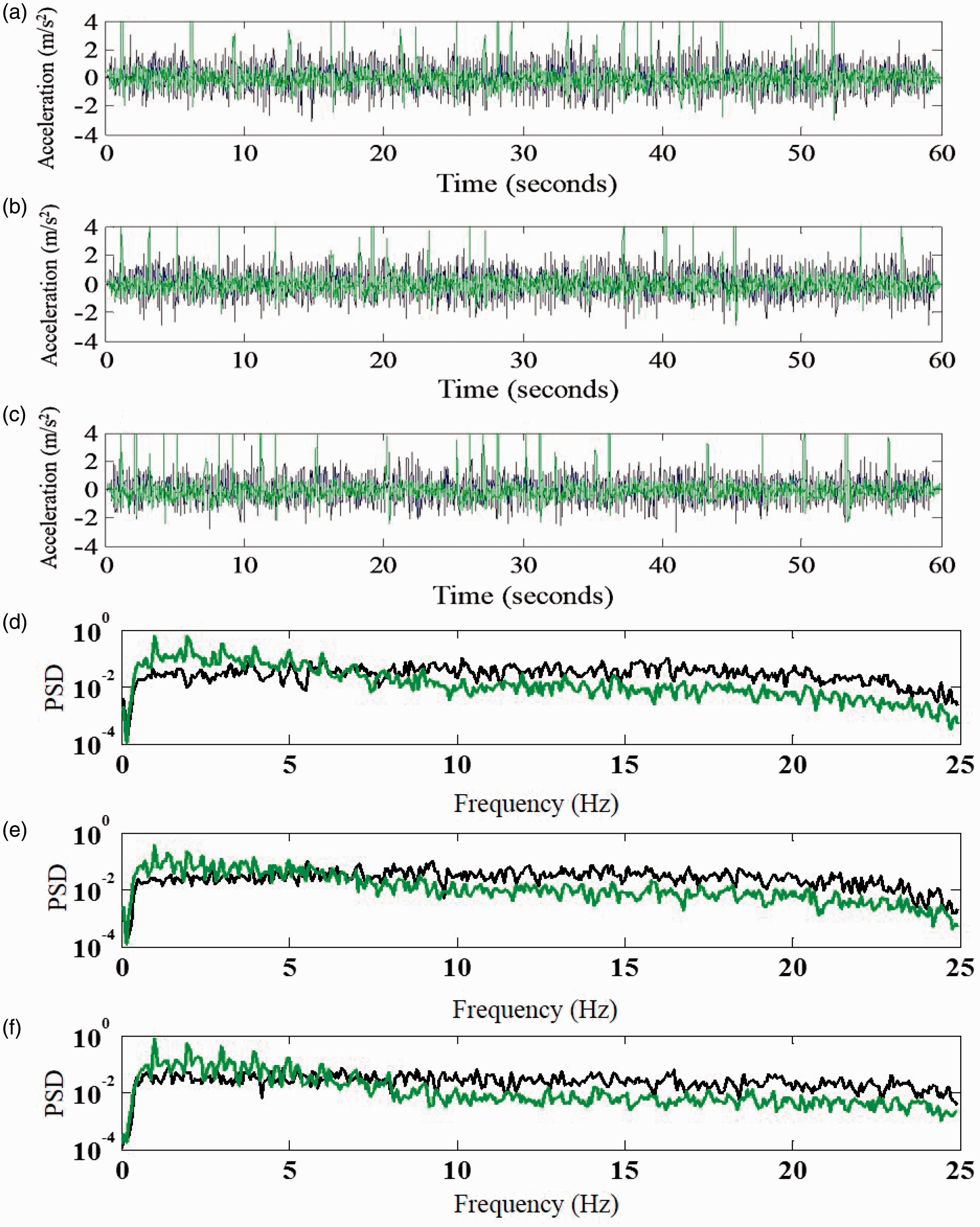
Data collection and analysis
Four wireless inertial sensors (MTw, Xsens Technologies, Enschede, Netherlands) were used to acquire the motion of the body and rigid platform. One sensor was placed on the forehead (on the skin) just between the eyebrows, one on the flattest location of the sternum (on the skin), one on a belt tightened over the left anterior superior iliac spine, and one on the rigid surface of the motion platform as a reference for the input. The sensors were adhered to the body and the motion platform using double-sided tape, and were further secured by banded strips of tape. Each MTw sensor measured accelerations, angular velocity, and orientation in three-directional space.
The sensor data were recorded at 60 Hz to a desktop computer, trimmed, and post-process low-pass filtered at 28 Hz. Because of the synchronized data from a multitude of sensors, important information can be gathered that would otherwise not be possible. Correction methods were used to ensure the accuracy of the data where the sensors were attached at an angle or attached to curved regions on the body. 17
Relative motion of body segments
In this work, the resulting relative motions of the human at the neck and torso regions were selected as measures of the performance of the contact surfaces during WBV and shocks. These motions include the relative joint angles (equation (1)), the relative angular acceleration (equation (2)), and the relative linear acceleration (equation (3)).



Statistical analysis
All data were consolidated using the RMS values of each metric from equations (1) to (3) and were averaged among the twelve participants. The standard deviation was then calculated, and ±1 standard deviation error bars were added to all graphs. For specific comparisons among directions, configurations, or vibration conditions, Welch's t-tests were performed using the assumption of unequal variances. For any statements of significance, p-values less than 0.05 (two-sided) were considered to be significant.
Results
No-strap configuration
In this setting, the participants were tested during WBV using (i) the litter only with no straps (Figure 1(a) with no straps), and (ii) the litter with spinal board with no straps (Figure 1(b) with no straps). The results (Figure 3(a)) showed that the RMS values of the relative head-to-chest joint angles were affected by adding the spinal board, but the differences were not significant. The RMS angular accelerations (Figure 3(b)) showed that the spinal board caused reductions (significant with p < 0.05) in the roll and pitch directions of the head-to-chest motions. The linear accelerations (Figure 3(c)) were significantly reduced (p < 0.01) in the vertical head-to-chest motion when using the spinal board; however, the torso region showed little change.
The resulting relative motions during WBV at the neck (head-to-chest) and torso (chest-to-hip) regions when using the litter only versus the litter with spinal board during the straps and no-straps configurations. Data shown includes (a) relative angular displacements, (b) relative angular accelerations, and (c) relative linear accelerations. Bars indicate the average RMS values for participants. The error bars are based on ±1 standard deviation.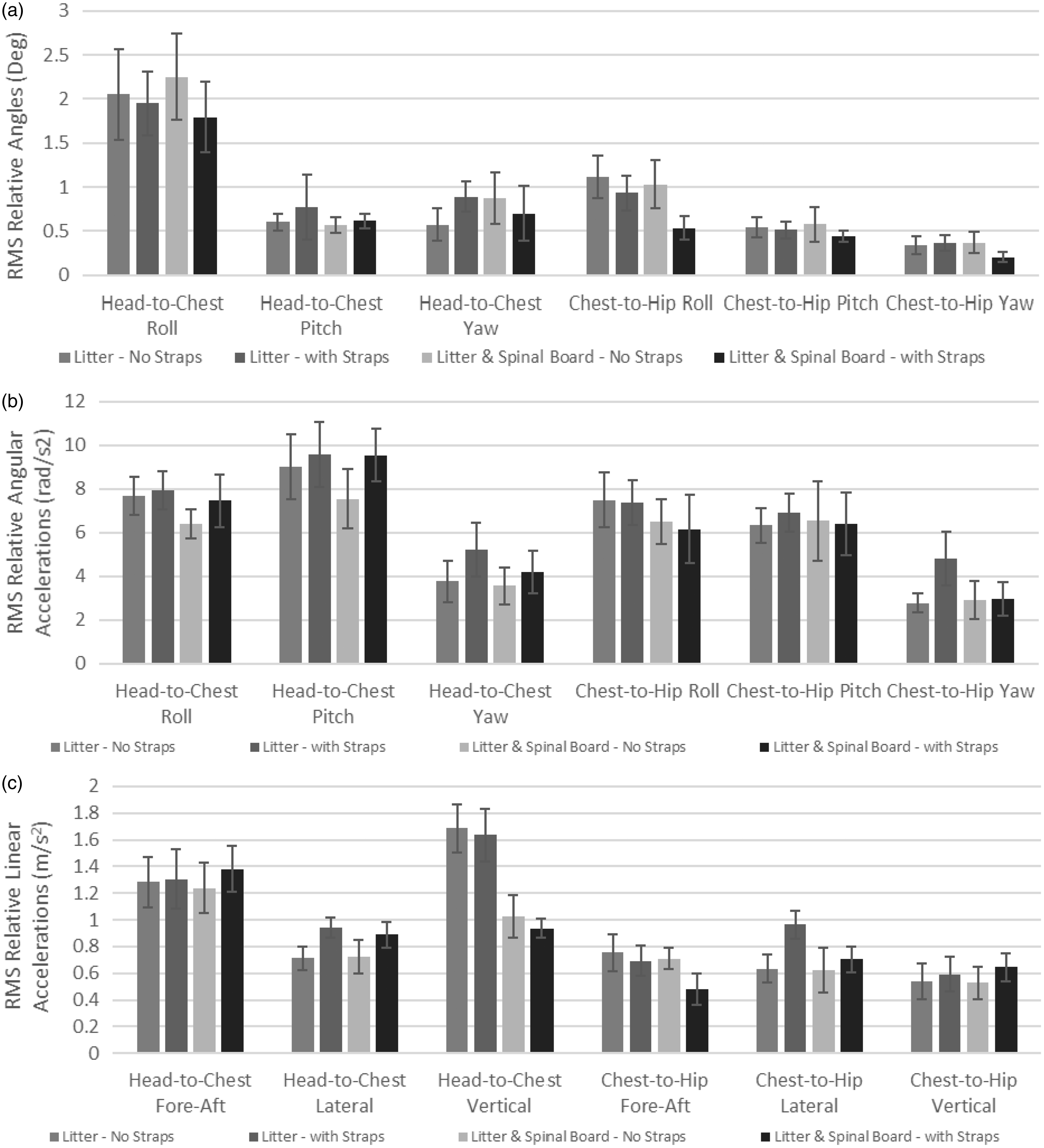
Strap configuration
In this setting, the participants were tested during WBV using the litter only with straps (Figure 1(a)) and the litter with spinal board with straps (Figure 1(b)). In this case, the head-to-chest and chest-to-hip RMS joint angles were always reduced when using the straps (Figure 3(a)) but were not always significant. The spinal board reduced the angular acceleration in every direction (Figure 3(b)) on average, although not always statistically significantly (p > 0.05). However, the linear acceleration is significantly reduced (p < 0.01) in the vertical head-to-chest direction and the fore-aft and lateral chest-to-hip directions when the spinal board is added (Figure 3(c)).
Effect of shocks mixed with vibration
In this setting, the participants were tested during vibration mixed with shocks using the litter only (Figure 1(a)) and the litter with spinal board (Figure 1(b)). For the safety of participants, straps were used in all cases. Figure 4 shows the effect of using the spinal board during 3D random vibration mixed with shocks.
The resulting relative motion, at the neck (head-to-chest) and torso (chest-to-hip) regions when using the litter only versus the litter with spinal board during WBV and WBV with shocks. Data shown includes (a) relative angles, (b) relative angular accelerations, and (c) relative linear accelerations. Bars indicate the average RMS values for participants. The error bars are based on ±1 standard deviation.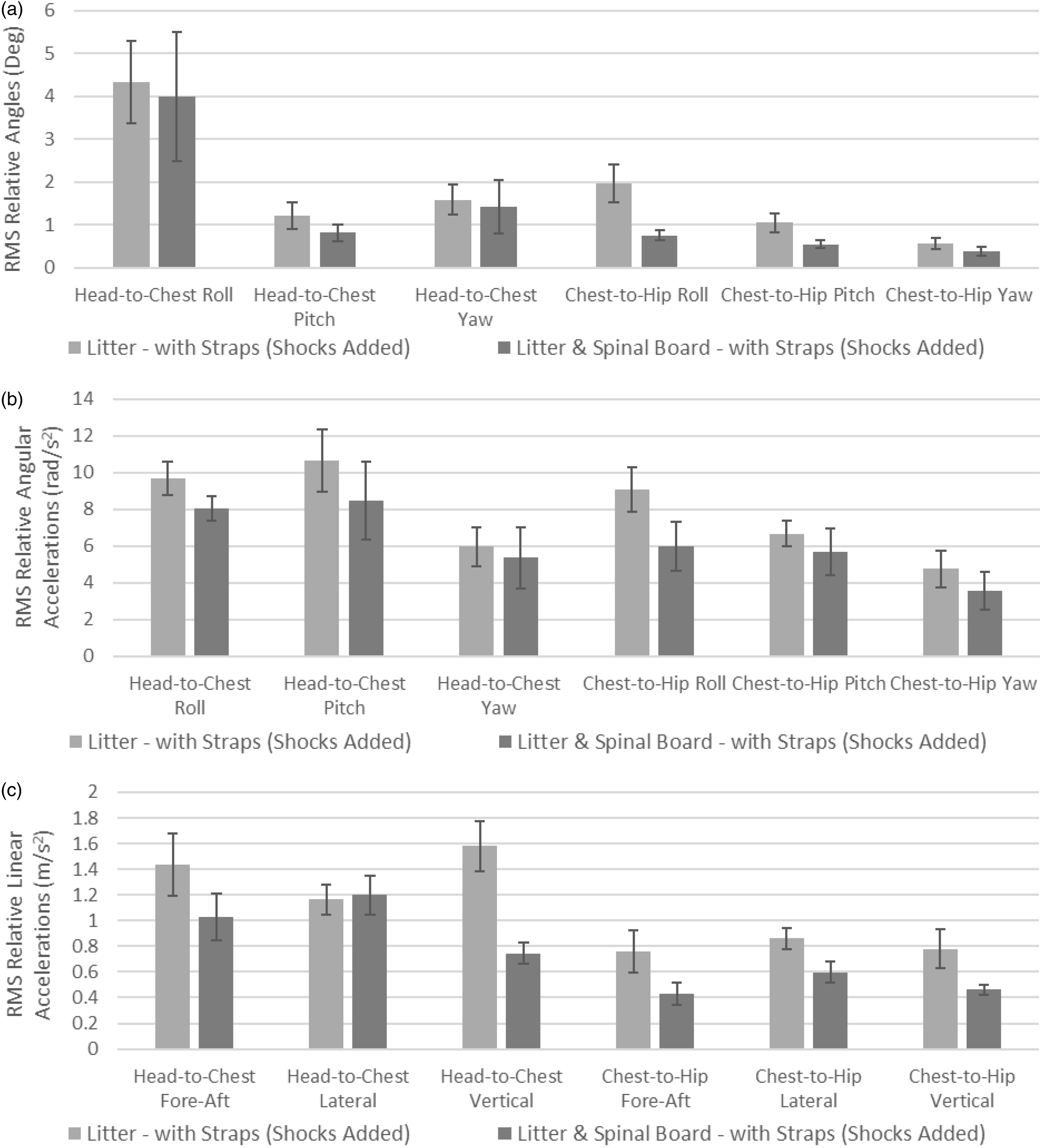
The addition of the spinal board reduced the relative joint angles in all directions, but significantly (p < 0.01) reduced the roll and pitch at the torso region of the participants during shocks, as shown in Figure 4(a). In addition, the spinal board reduced the average angular accelerations in all directions at the neck and torso regions; however, the reductions were not all significant (p-values between 0.40 and 0.01). The addition of the spinal board reduced the linear acceleration significantly in most directions during shocks (p < 0.01), except for the head-to-chest lateral direction, as can be seen in Figure 4(c).
Discussion
This work demonstrates the sensitivity of the supine-human involuntary motions to the type of contact surfaces in WBV and shock environments. The results show that the addition of a spinal board to the litter reduced the relative involuntary motion at the neck and torso regions, as it added a rigid-like support to the backside of the person, and was significantly effective in the vertical direction. The results also show that across all locations and metrics calculated, the addition of the spinal board with body straps had either a neutral or a positive effect on the resulting human motion. As higher magnitudes of shocks are introduced, it may be even more critical that the contact surfaces of a supine person include spinal board and body straps. It should be noted that the spinal board may generate a relatively high static discomfort when compared with the litter only; however, the resulting total discomfort (static and dynamic) when using the litter with spinal board may be lower than the litter only. 5 It is expected that the static and dynamic discomfort properties of the litter materials will play a role in the overall resulting discomfort.
Intuitively, it is expected that adding more body straps will reduce the relative angles between the adjacent segments of the supine human body; however, the results show that the associated acceleration reduction may not be as intuitive. For example, the resulting relative angular accelerations (associated with the bending forces at the joint) were increased significantly in some directions for both the litter with straps configuration and the litter with spinal board with straps configuration (Figure 3). The relative linear accelerations, on the other hand, did not show consistency; they increased in some directions and decreased in others. Nevertheless, the combined effect of body straps and the spinal board proved to be more effective than the other configurations presented in this work, especially when shocks were present.
It should be noted that the results of this study can be applied to the range of vibration magnitudes and frequencies presented, as well as to the specific transport litter, body straps, and spinal board used in this work. Limitations of this work may include the uncertainty in the amount of initial tension that was applied to the straps, which might have affected the response of the subjects. While care was taken to unify the initial tension in the straps, the amount of tension applied during the experiments may differ from that applied in real-life applications. Another limitation is that the head pad was used only with the litter with board, as part of the set-up for this configuration, and was not used with the litter-only configuration. In the litter-only configuration, however, the head lay on the litter fabric. The difference between the properties of the head-supporting materials under the two configurations may have generated differences in the response of the head under different vibration conditions. The variability between the subjects' anthropometry and posture also may have affected the responses of the subject under the two transport configurations. Nevertheless, with the twelve subjects used in this study, it is expected that the averaging process will mitigate some of these variations. This study used the RMS as a metric for the comparison between the different conditions. A previous study found that the results using the RMS were very well correlated with the results using the range of motion as a metric. 15 Other types of analysis in the time and frequency domains may be considered in future work.
Conclusion
The involuntary response of supine humans under WBV and shocks is considerably affected by the contact surface materials. The addition of the spinal board and straps to the litter resulted in a positive reduction in the relative motion at the neck and torso areas of supine humans during WBV and shocks. While the latter could be true during dynamic motions, the rigid surface of the spinal board and the tension in the body straps may increase the static discomfort. Therefore, the ergonomic design and evaluation of materials used in transport systems should be carried out and tested in static and dynamic environments. The selection of the contact surfaces may become even more critical as higher magnitudes of shocks are introduced.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.