
Abstract
The extended Kalman filter is a useful tool in the research of structural health monitoring and vibration control. However, the traditional extended Kalman filter approach is only applicable when the information of external inputs to structures is available. In recent years, some improved extended Kalman filter methods applied with unknown inputs have been proposed. The authors have proposed an extended Kalman filter with unknown inputs based on data fusion of partially measured displacement and acceleration responses. Compared with previous approaches, the drifts in the estimated structural displacements and unknown external inputs can be avoided. The feasibility of proposed extended Kalman filter with unknown inputs has been demonstrated by some numerical simulation examples. However, experimental validation of the proposed extended Kalman filter with unknown inputs has not been conducted. In this paper, an experiment is conducted to validate the effectiveness of the proposed approach. A five-story shear building model subjected to an unknown external excitation of wide-band white noise is conducted. Moreover, the data fusion of partially measured strain and acceleration responses from the building is adopted as it is difficult to accurately measure structural displacement in practice. Identified results show that the recently proposed extended Kalman filter with unknown inputs can be applied to identify structural parameters, structural states, and the unknown inputs in real time.
Introduction
The identification of structural dynamic systems using the measurements of structural vibration data has become an important issue in structural health monitoring (SHM).1–4 Since it is difficult to measure all structural responses by deploying many sensors, structural identification with only partial measurements of structural responses has gained more and more attention.5–7 The extended Kalman filter (EKF) is an effective method for real-time identification of both structural states and structural unknown parameters by using partially measured structural dynamic responses, and it has been used in the researches of SHM and vibration control.8–12 However, the conventional EKF approach is only applicable when the information of external inputs to structures is available. Since it is impractical to measure all external excitations to the structure in the actual situation, there is a limitation in the application of the traditional EKF method. Therefore, it is necessary to investigate algorithms for the identification of structures as well as the unknown external inputs.
In the last decade, some improved methods for simultaneous identification of the structural parameters, structural states, and the unknown excitations have been proposed, e.g. the iterative least-squares approaches with unknown excitations,13,14 an EKF approach with unknown input based on minimizing the sum square error, 15 a sequential nonlinear least-square estimation for damage identification of structures with unknown inputs and unknown outputs, 16 a statistical algorithm to identify the structural parameters and the input information sequentially, 17 and a two-stage method based on the dynamic response sensitivity to identify both the structural parameters and external excitations. 18 Recently, more progress has been made in this field, e.g. the weighted adaptive iterative least-square estimation with incomplete measured excitations, 19 a virtual distortion method, 20 and the approaches based on the extended Kalman estimator. 21 Although these methods have made progress in the application of EKF, they are not the direct extension of conventional EKF and most of them have some limitations, such as drifts in the estimated structural displacements.22,23 Therefore, the unknown inputs will also drift and result in inaccurate identification. Although regularization approaches or postsignal processing schemes can be used to treat the drift in the identified results, these treatments are not suitable for the real-time identification of coupled structural state and unknown inputs. 24
Recently, an extended Kalman filter with unknown inputs (EKF-UI) based on data fusion has been proposed by the authors, 25 in which the conventional EKF is directly extended and the previous complex method of identifying the unknown excitation will be simplified. Data fusion of partially measured displacement and acceleration responses is used in the method to avoid the drifts in the identified state and unknown external inputs in other previous approaches. The feasibility of proposed EKF-UI has been demonstrated by some numerical simulation examples. In this paper, an experiment is conducted to validate the effectiveness of the proposed EKF-UI, which can make up the lack of experimental validation and serve as a supplement for numerical simulation examples performed in the authors’ previous paper. A five-story shear building with an external excitation of wide-band white noise on the third story is conducted in the experiment to demonstrate the effectiveness and accuracy of the proposed EKF-UI approach. Moreover, since it is difficult to measure structural displacement accurately in practice, the relationship between strain and displacement is derived in this paper and data fusion of partially measured strain and acceleration responses is adopted in this experimental validation.
Review of EKF-UI
The equation of motion of an n-DOF structure under external excitation can be expressed as

Since the derivation of the proposed EKF-UI is based on that of the traditional EKF, 14 the derivation of the conventional EKF is first briefly reviewed below.
Brief review of the conventional EKF
When all of the external inputs to the above n-DOF structure are known, the equation of motion can be expressed as

In this paper, the structure is considered as only time-invariant system, i.e. assuming

The observation vector is expressed by



The conventional EKF mainly consists of the two procedures. The first one is the time update (prediction) procedure, in which

The covariance matrix of the state prediction error is

The second procedure of the EKF is the measurement update (correction) one, in which


The covariance matrix of the update error is

In the above conventional EKF approach, external input vector
The direct extension of conventional EKF to EKF-UI
When some external inputs to the above n-DOF structure are unknown, analogously, equation (1) can be converted into state equation as follows

The observation vector can be expressed as

Equations (12) and (13) can be linearized by Taylor series expansion to the first order as follows


Analogous to the conventional EKF in the first time update (prediction) procedure

The second procedure is the measurement update (correction) procedure, in which


However,

Where

The covariance matrix of the state update error is

Based on equation (19), the error covariance matrix

The error covariance matrix

Finally,

When all external excitations are known, the proposed EKF-UI reduces to the conventional EKF. Since the proposed EKF-UI is a direct extension of the conventional EKF, it greatly simplifies the complex EKF-UI method proposed earlier. 7
Accelerometers are most often used in structural dynamics applications. However, the inherent instability of the current EKF-UI method using acceleration measurements, in addition to the insensitivity of acceleration to the quasi-static component, both lead to low-frequency drifts in the estimated structural displacements and external excitations.22,23 Although regularization scheme or postsignal processing can solve the drifts problem, they are still unavailable for the real-time identification of structural states and unknown inputs.
Data fusion of partially measured displacement and acceleration responses is applied in the proposed EKF-UI 25 to prevent the previous drifts in the estimated structural displacements and unknown external inputs. However, it is difficult to measure the structural displacement accurately in practice. In order to solve this problem, it is proposed in this paper that partially measured strain should be added to the acceleration measurements in the EKF-UI.
Data fusion of acceleration and strain measurement for the EKF-UI
Low- and high-frequency vibration characteristics are contained in the displacement and acceleration measurements, respectively, and there is a certain relationship between strain and displacement. The strain–displacement relationship is presented below in the context of finite element model
26

The observation equation

The strain observation equation can be expressed as


Partially measured acceleration and strain responses shown in equations (26) and (27), respectively, are combined for the observation equations. So, the problem of low-frequency drifts can be effectively solved by data fusion of acceleration and strain.
Experimental validation
To demonstrate and validate the performances of the proposed data fusion-based EKF-UI, a five-story shear building experiment is conducted to identify the state of the structure and the unknown inputs in real time with only partial measurements of acceleration and strain.
Experiment model and equipment
As shown in Figure 1, the experiment model is a five-story shear frame. The main structure is 350 mm in length and 250 mm in width. The first story is 240 mm in height and the others are 200 mm. The connections are double-row bolts, which can be approximated as a fixed connection. The masses of the shear frame are assumed lumped at story level, and they are

Experiment model.
As shown in Figure 2(a), accelerometers are the small size sensors of type 333B30 produced by PCB company which are widely used in structural vibration and modal analysis experiments with high sensitivity. Strain sensors are piezoelectric strain sensors of type 740B02 which are suitable for dynamic strain response measurement as shown in Figure 2(b).
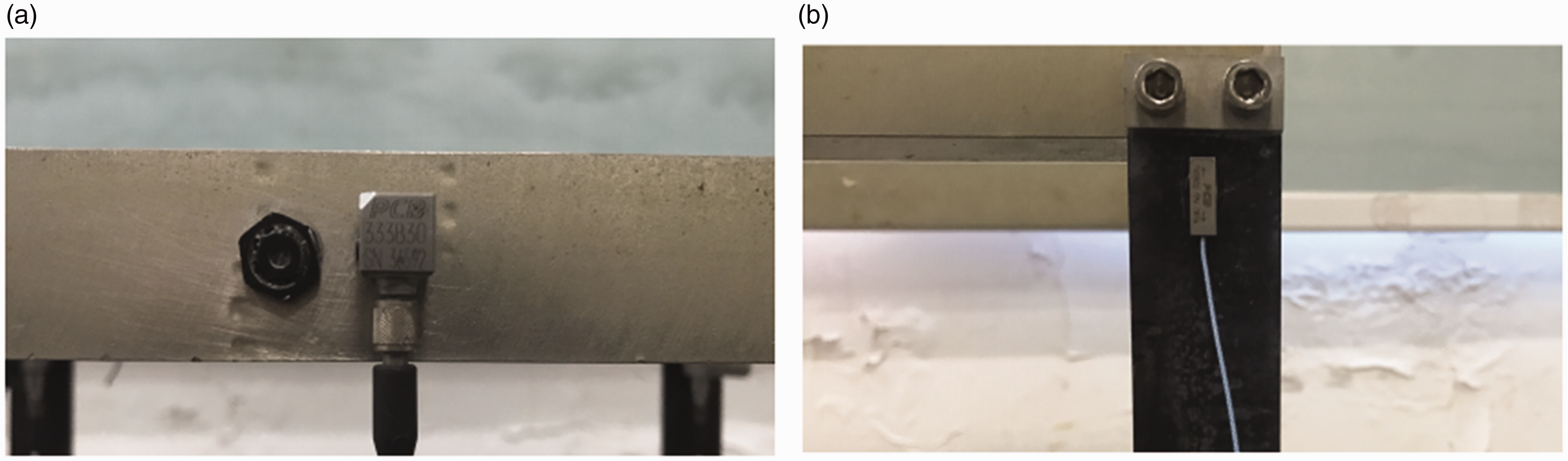
(a) Accelerometers and (b) strain sensor.
Force sensor of type 208C03 is installed at the middle of the third story and connected to the electromagnetic vibrator as shown in Figure 3. An external excitation of wide-band white noise is applied to the third story level and the excitation is generated by the signal generator of type RIGOL DG-1022 and power amplifier as shown in Figure 4. The external excitation exerted on the structure can be accurately measured by the force sensor; therefore, it can be compared with the identified unknown external input. The connection between electromagnetic vibrator and the structure is shown in Figure 5.
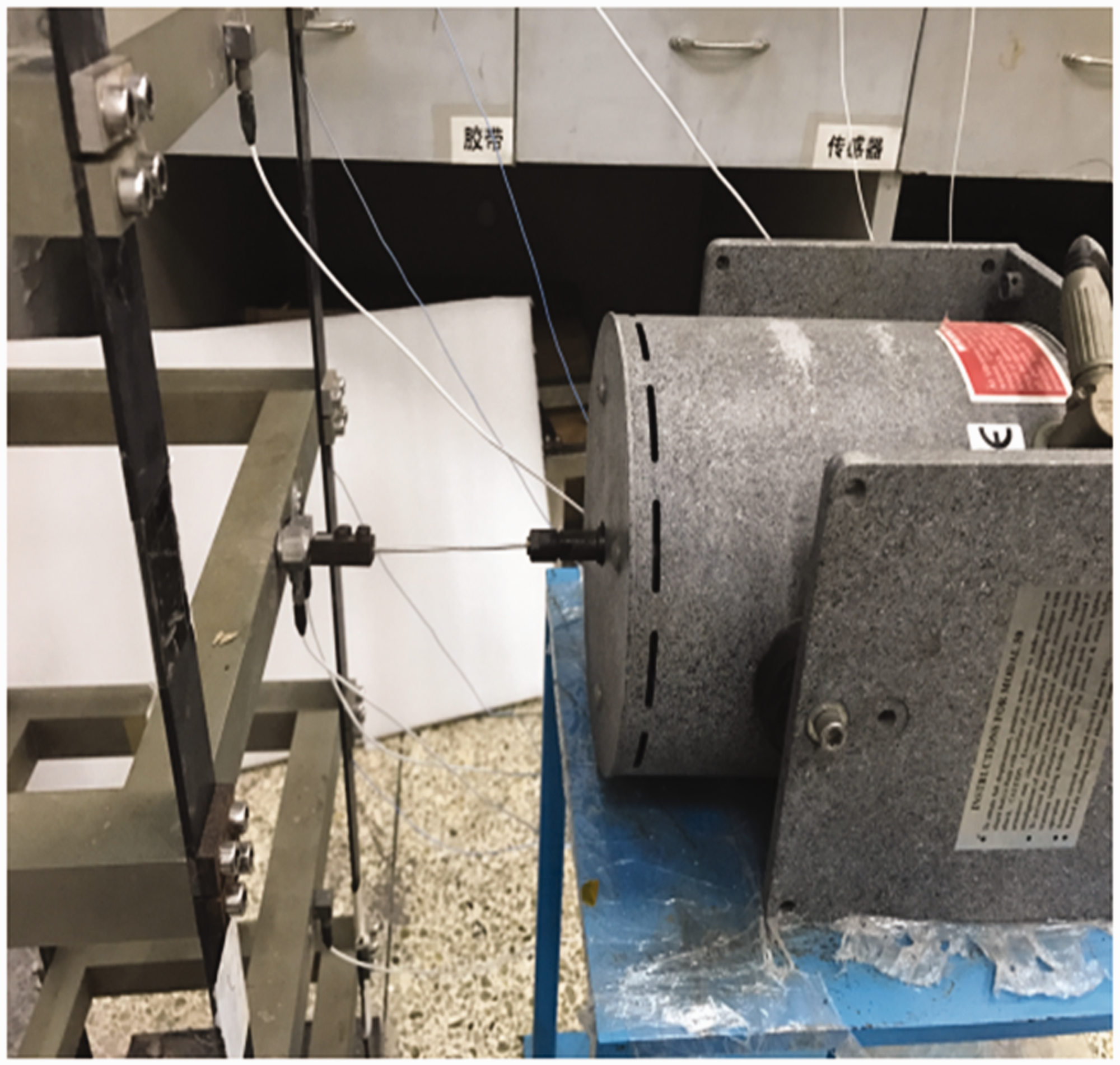
Force sensor and electromagnetic vibrator.

Signal generator and power amplifier.
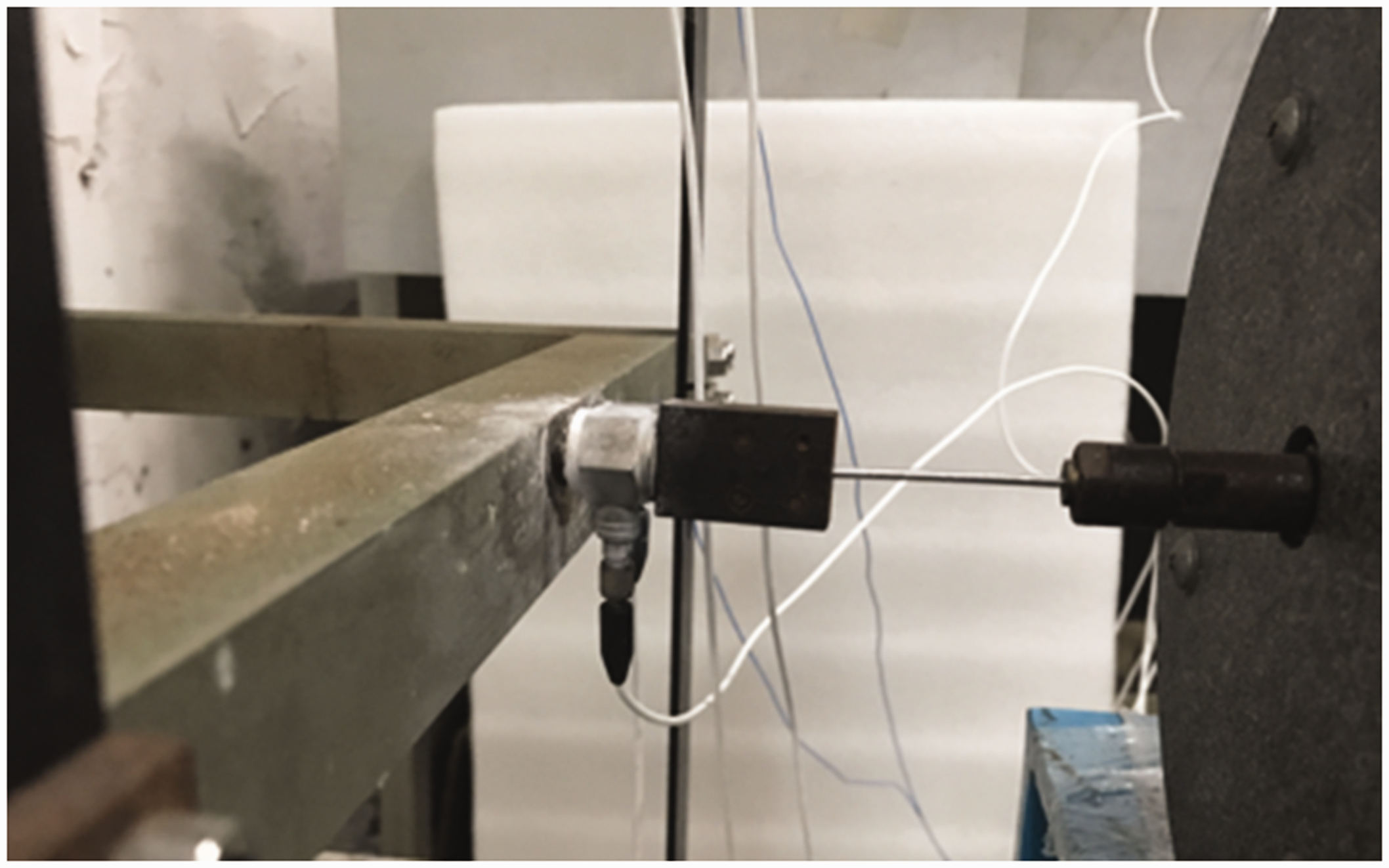
Connection between electromagnetic vibrator and the structure.
In the experiment, although two different types of sensors, accelerometers and strain sensors, are used, the signal data acquisition instrument National Instruments PXIe-1082 can ensure that the acceleration and strain responses are measured simultaneously, so the phase shift errors can be ignored in this experiment. The signal data acquisition instrument and operation interface are shown in Figure 6.

Signal data acquisition instrument and operation interface.
The structural damping is assumed as Rayleigh damping. A hammer force acting as a pulse is conducted on the fourth story so free attenuation response of each story can be measured. After FFT of the measurement responses, the first two natural frequencies of the structure can be estimated as 5.7 and 16.5 Hz, respectively, as shown in Figure 7. Band pass filtering is conducted at the band around the first frequency and then the filtered response can be obtained as shown in Figure 8.
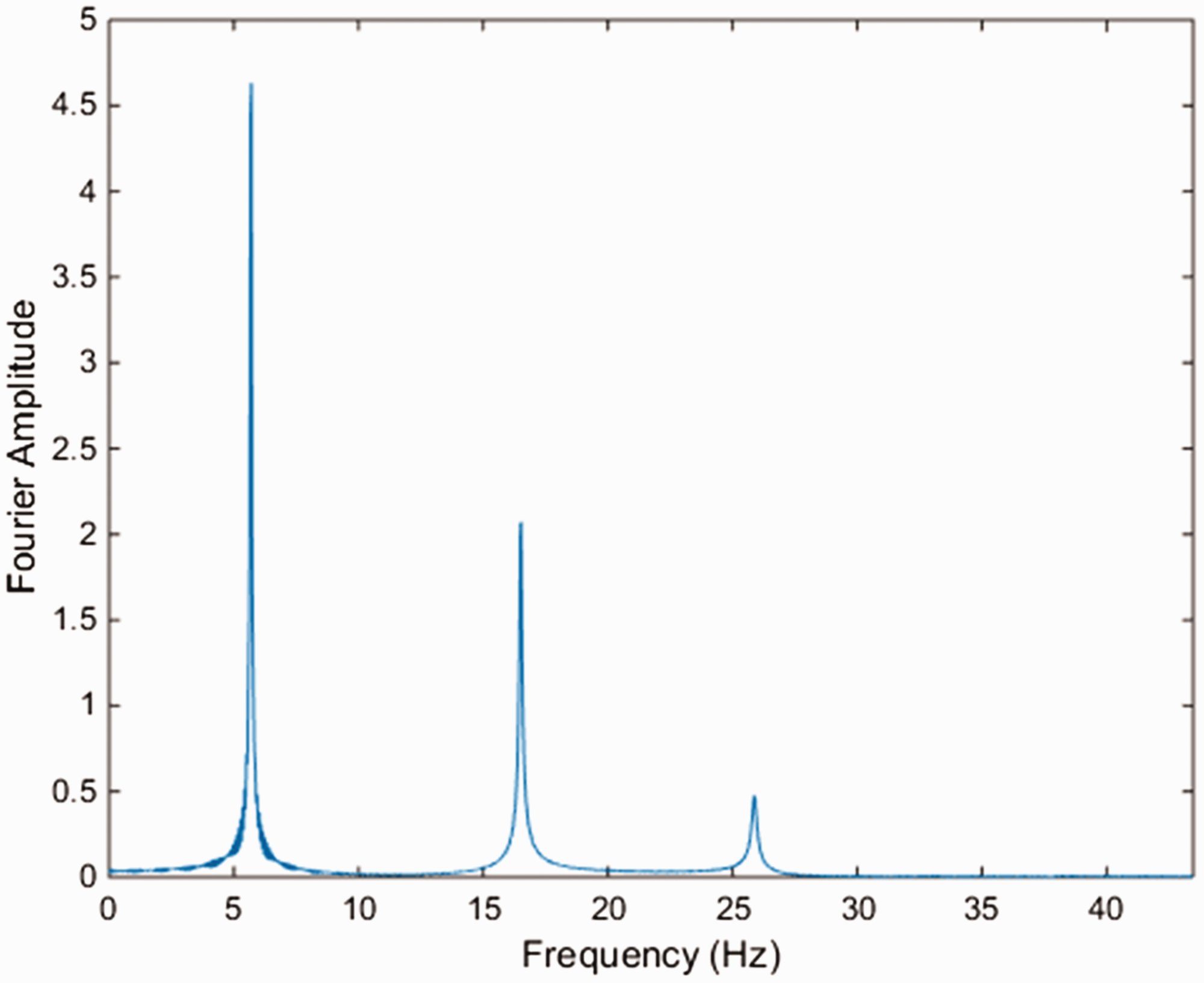
The first two natural frequencies of the structure.
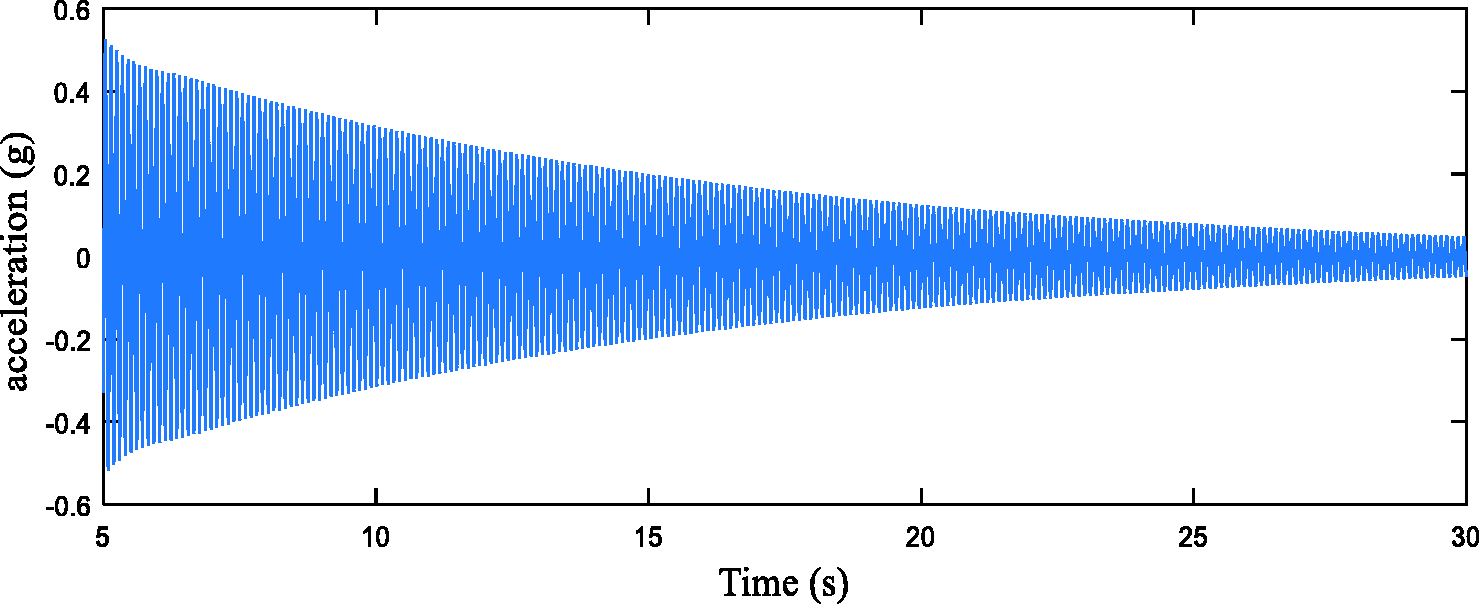
Acceleration response of the fifth story after 4.7–6.7 Hz band filtering.
When

Where
The first damping ratio of the structure from equation (28) is 0.0019. Similarly, the second damping ratio is 0.0095

Based on equation (29), the Rayleigh damping coefficients of the model can be estimated as α = 0.1342, β = 6.8066 × 10−6. The damping matrix is

An experiment was carried out to estimate the actual stiffness values of the structure, as shown in Figure 9. The results of the experiment are shown in Table 1.
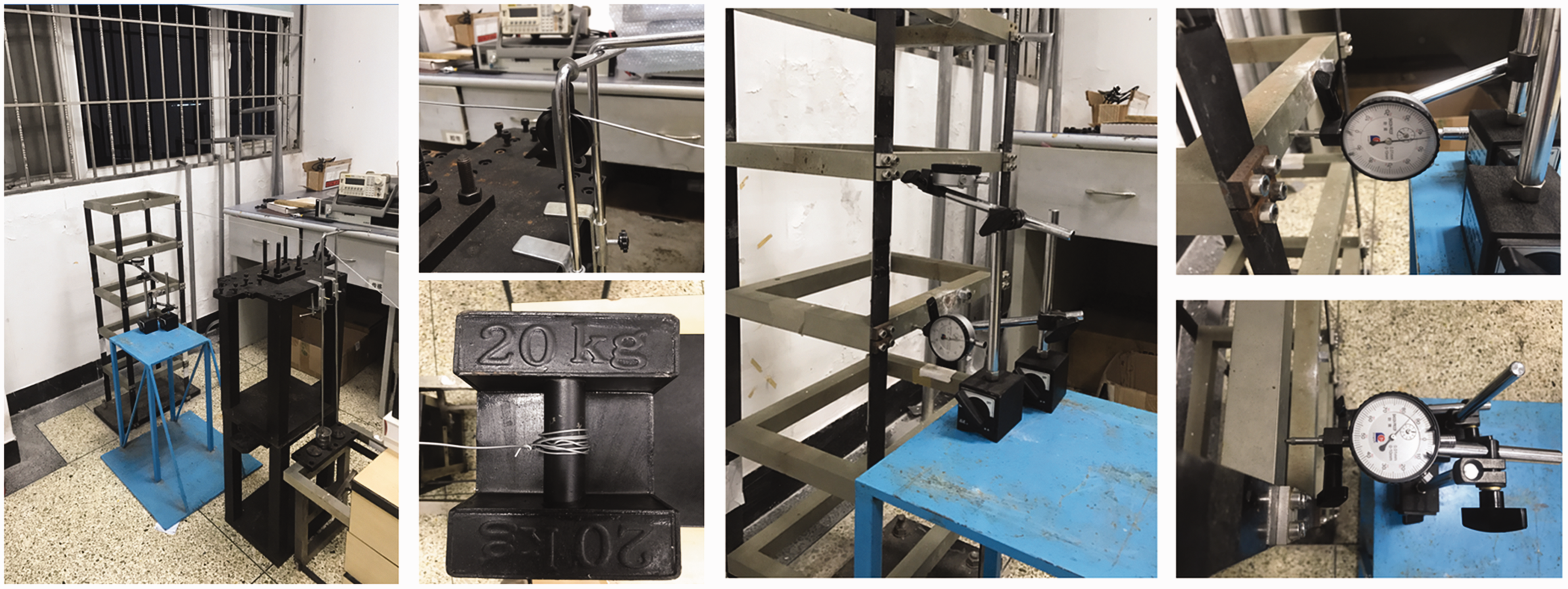
The experiment to estimate the actual structural stiffness.
Stiffness of the five-story structure.

In this EKF-UI experiment, the stiffness values estimated experimentally are taken as the reference stiffness parameters.
Experiment results by EKF-UI
Data fusion of partially measured strain and acceleration responses is adopted in this experimental validation. One strain sensor is installed on the surface of steel sheet between the third and fourth floors. The exact strain sensor location is shown in Figure 10.
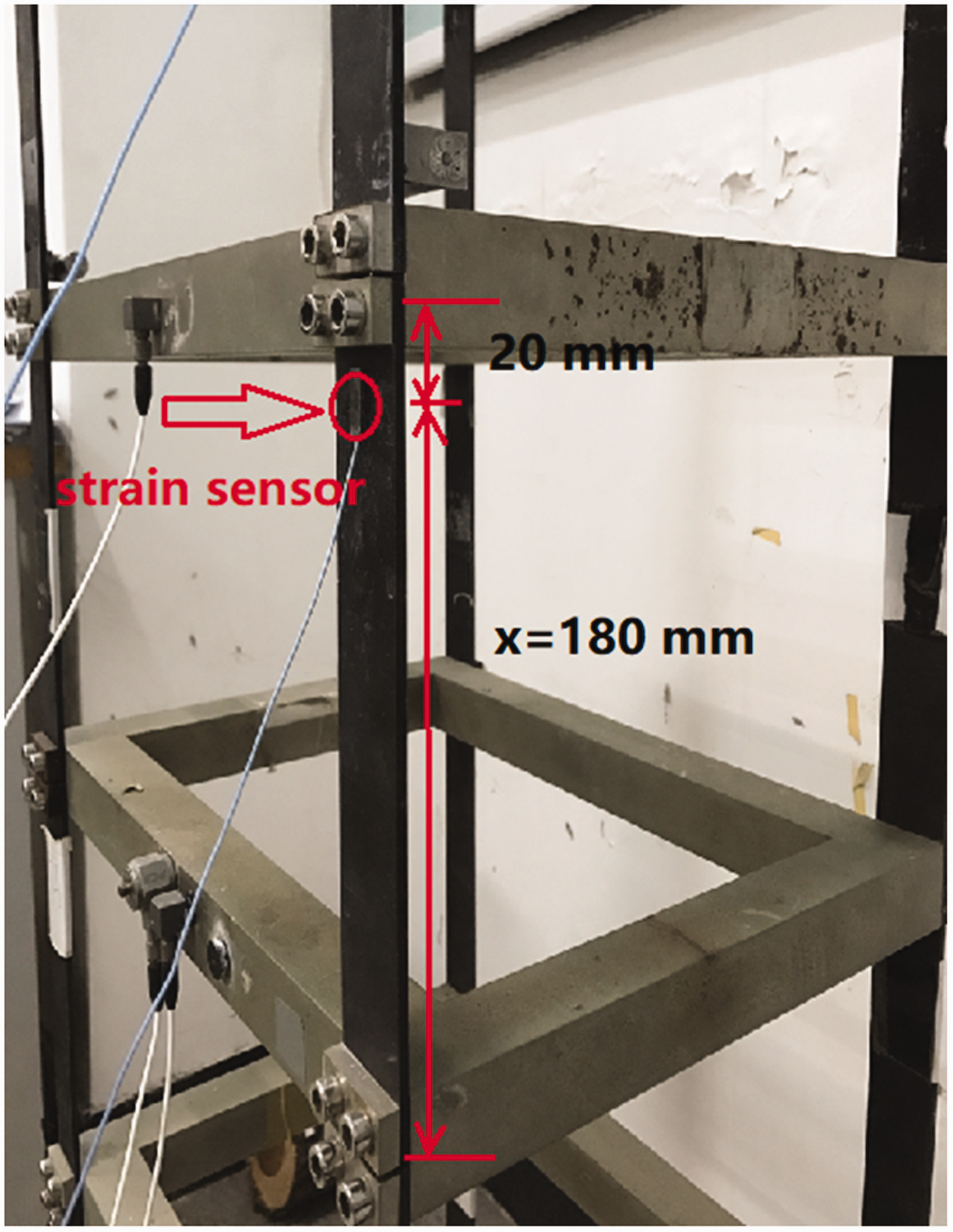
View of strain sensor location.
The relationship between measured strain and the displacement of the third and fourth story is

A wide-band white noise external excitation is exerted on the third story. Data fusion of three acceleration measurements at the first, third, and fourth stories and the above strain are used in the observation equation. In the algorithm, the sampling frequency is 1280 Hz. The initial story stiffness parameters are set as 80% of the reference values. The value of modeling error covariance matrix and the value of measurement noise covariance are set to

The initial value of force covariance and the initial value of structural states covariance are set to

The experimental results by EKF-UI are compared with the reference stiffness and corresponding results by EKF and shown in Figures 11 to 19.
It is shown in Figures 11 to 15 that each identified story stiffness converges to reference value within 2 s and the error is less than 4%. As shown in Figures 16 and 17, the identified velocity responses are in good agreement with the results identified by EKF. Figure 18 shows the identified displacement of the fifth story, in which the previous drifts in estimated structural displacement are avoided by the proposed EKF-UI with data fusion of acceleration and strain measurements. From Figure 19, it can be illustrated that the proposed method can effectively identify external excitation.
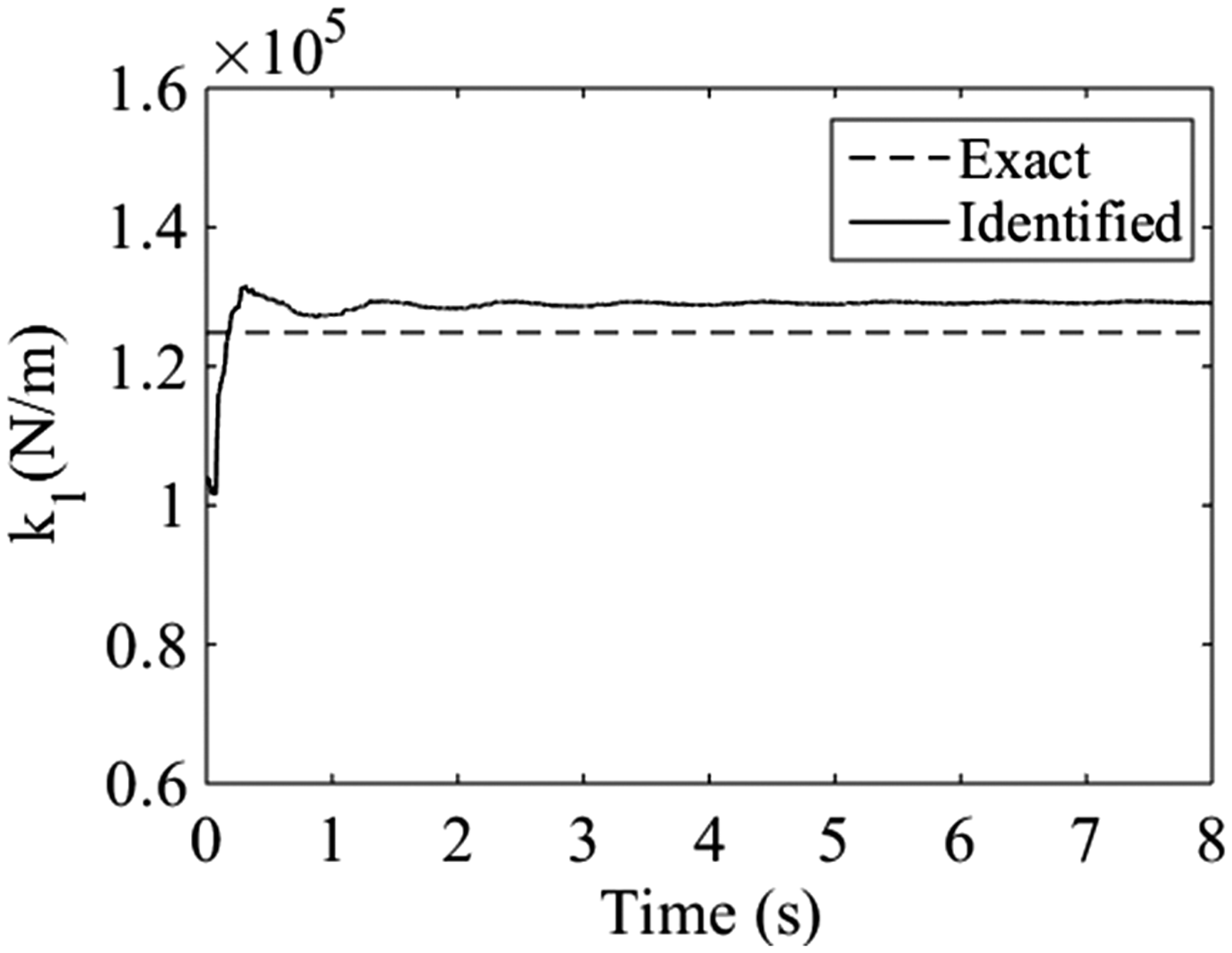
Convergence of identified stiffness k1.
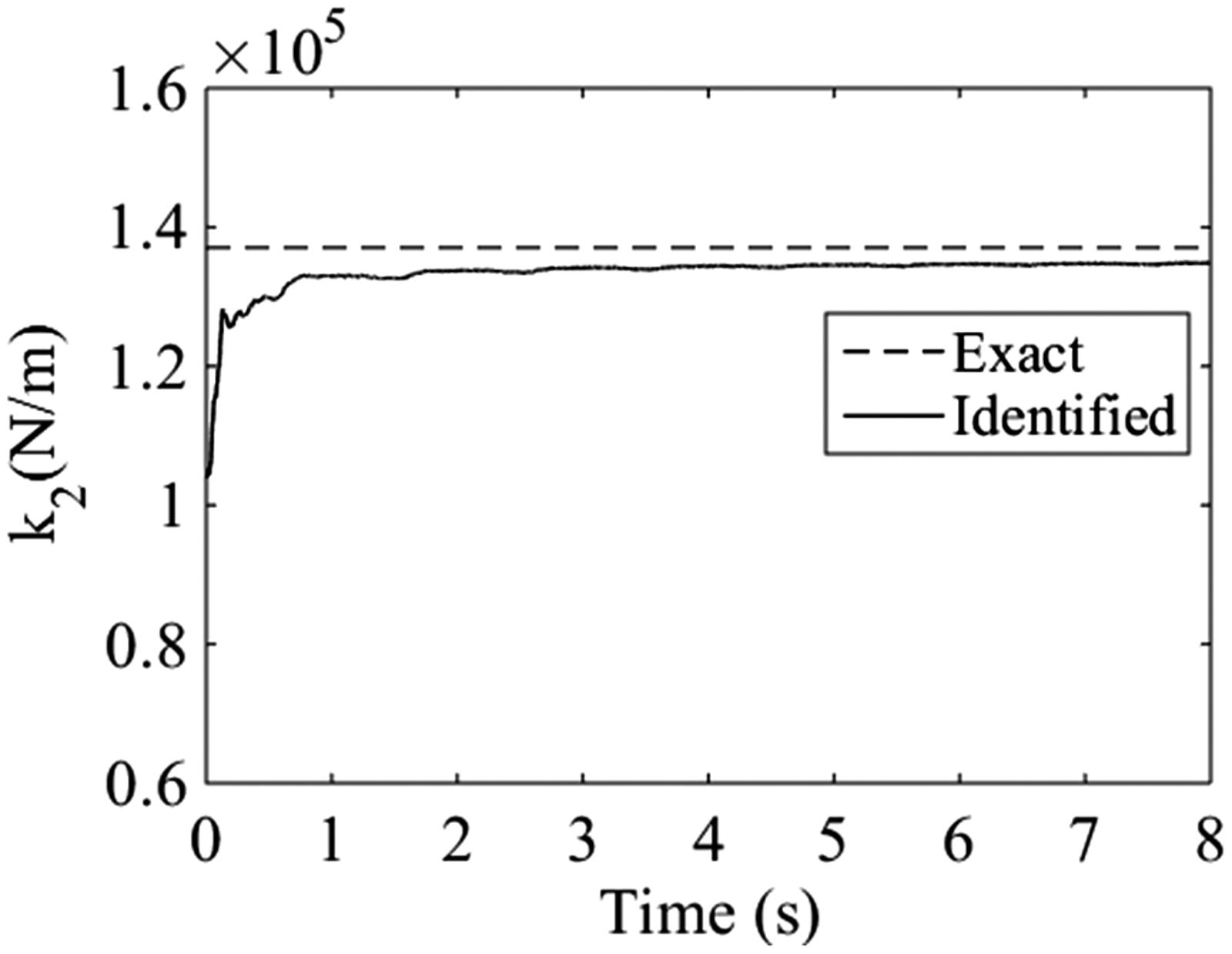
Convergence of identified stiffness k2.
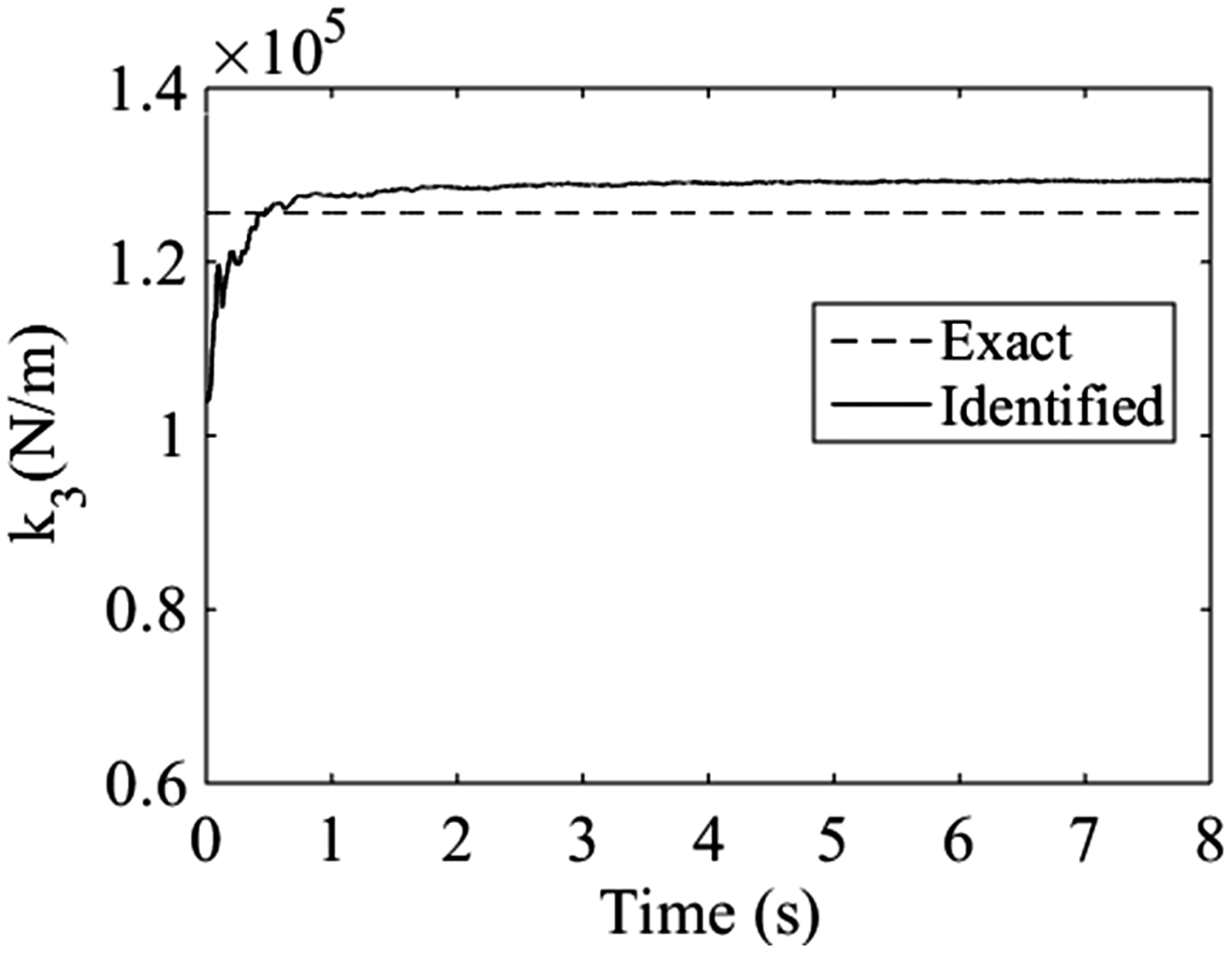
Convergence of identified stiffness k3.
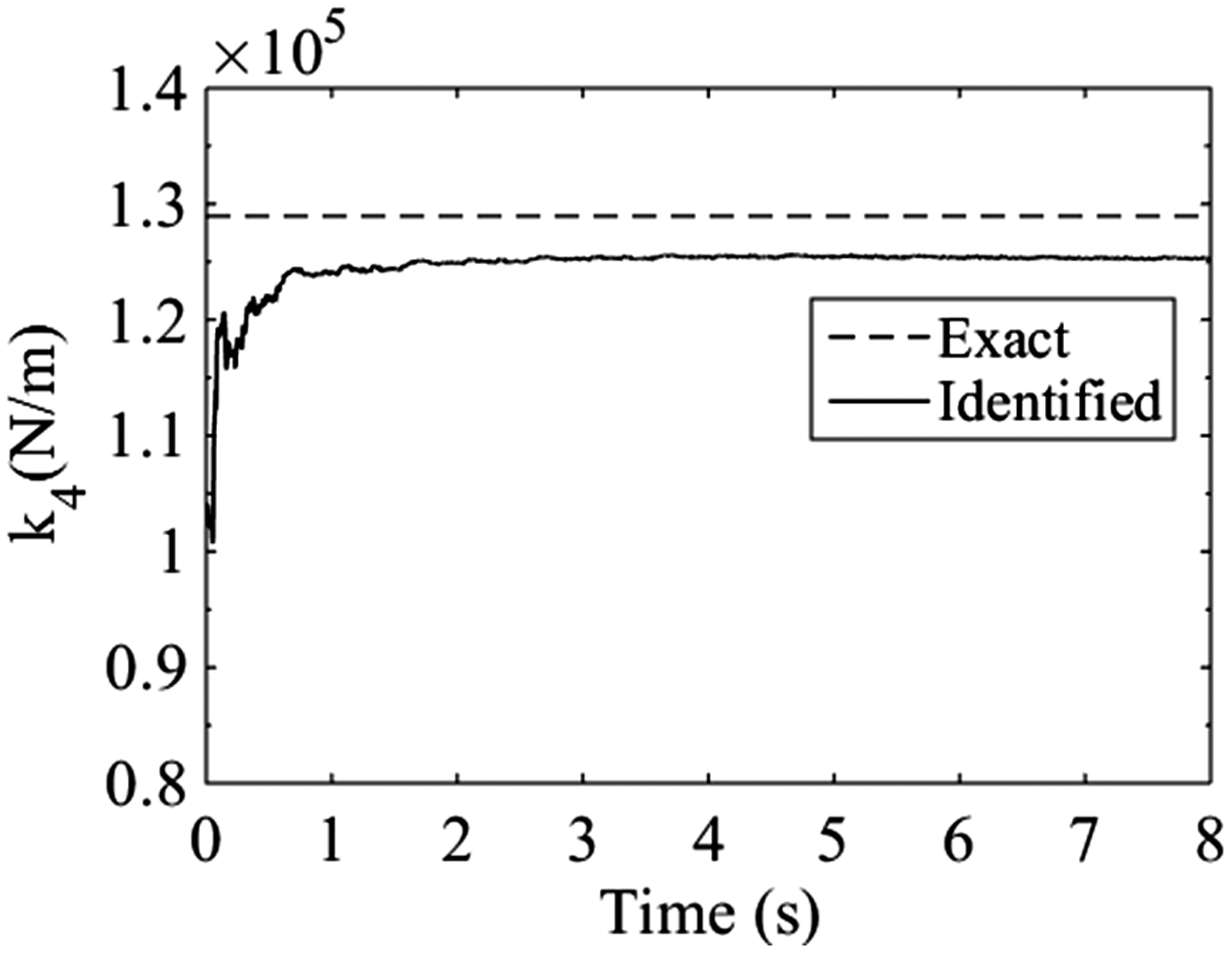
Convergence of identified stiffness k4.
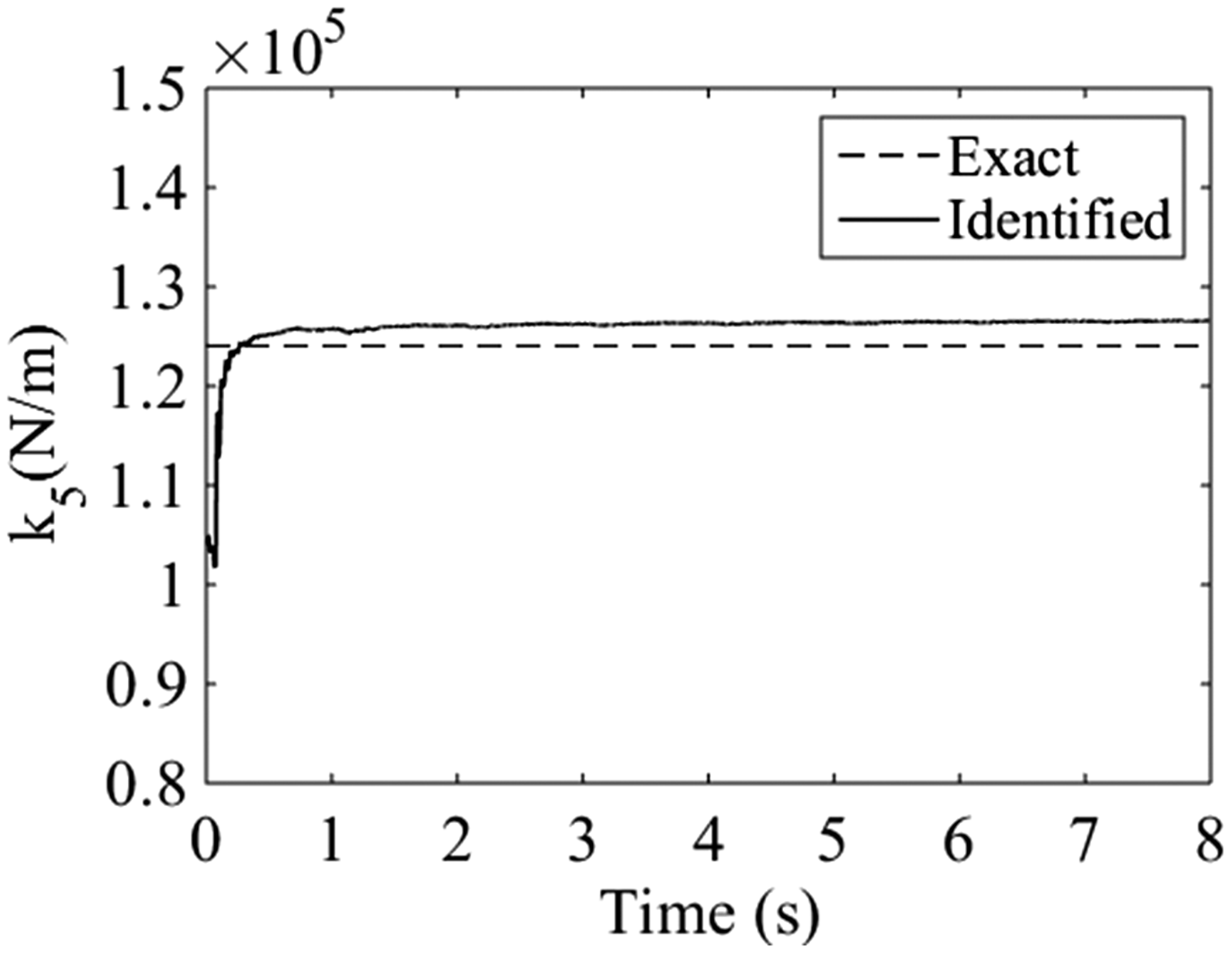
Convergence of identified stiffness k5.
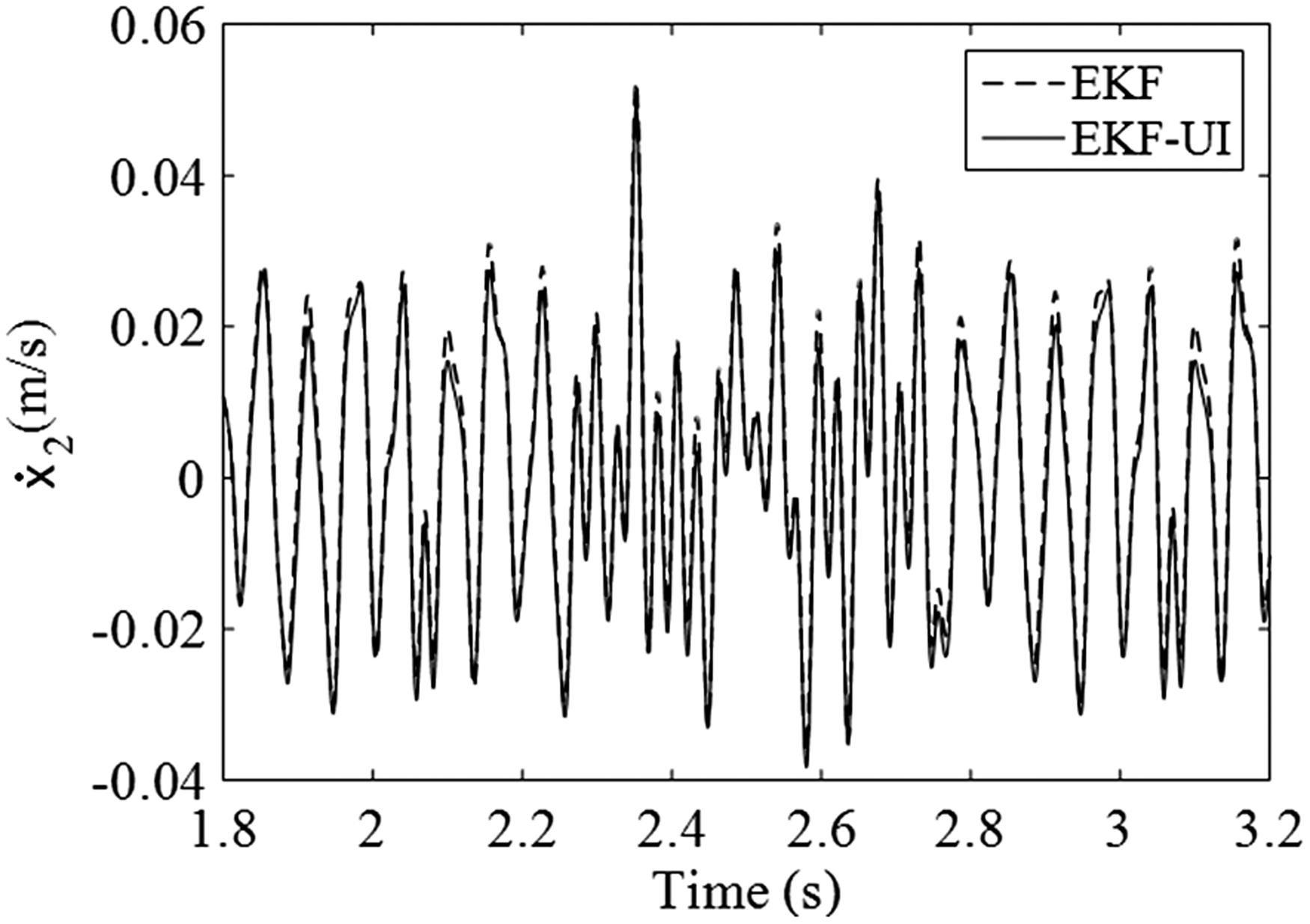
Identified velocity of second story.
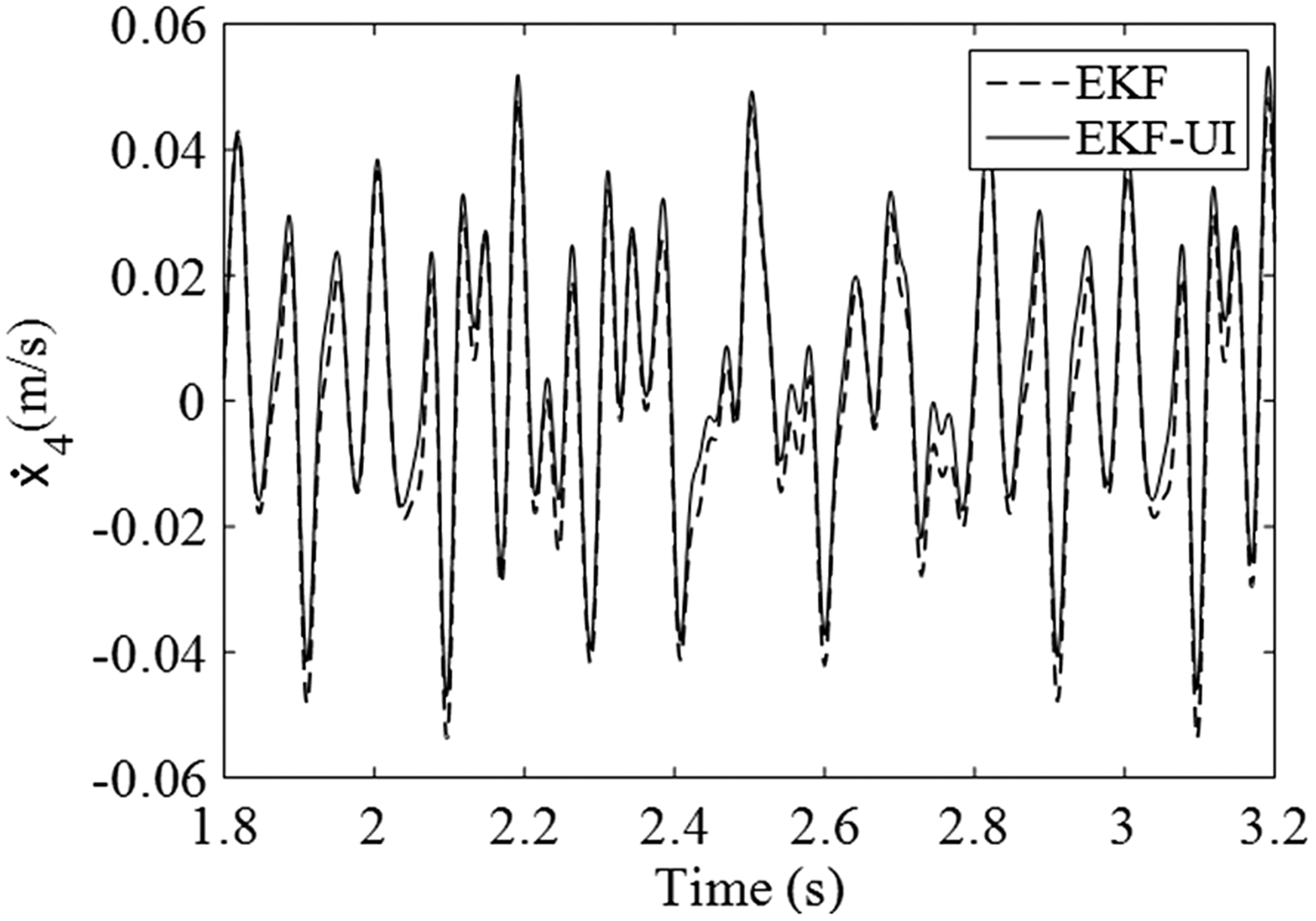
Identified velocity of fourth story.
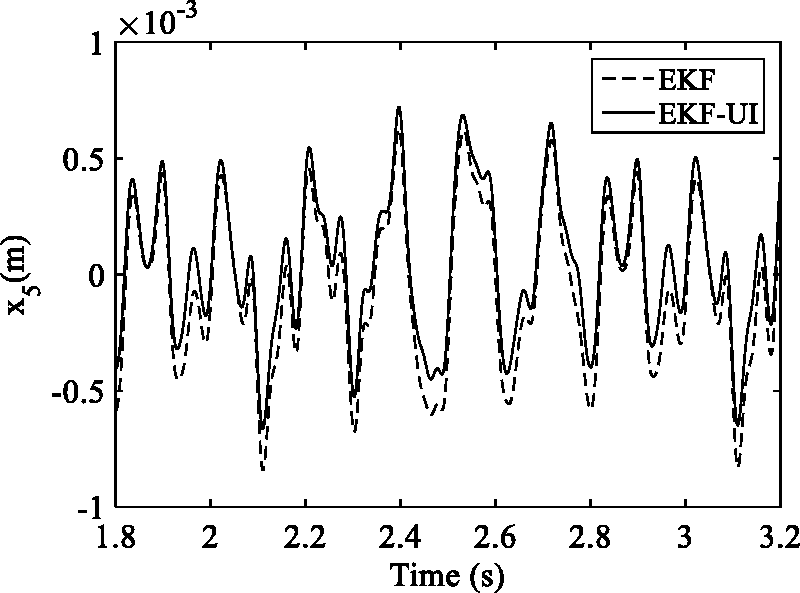
Identified displacement of fifth story.
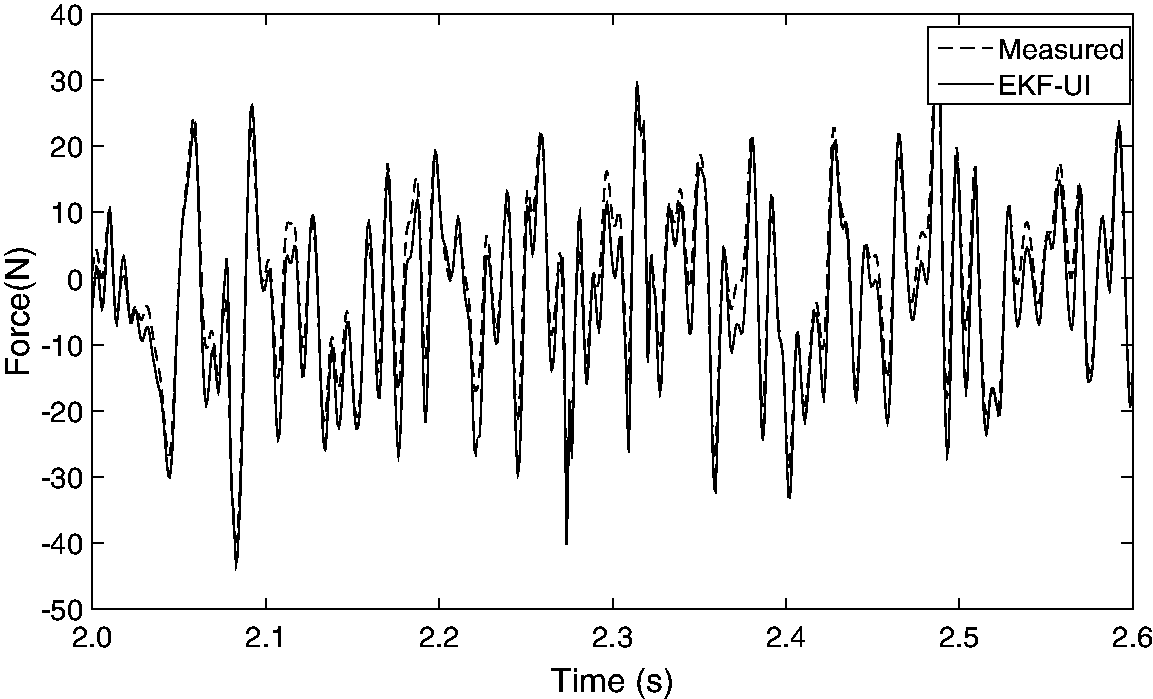
Comparison of identified and measured unknown input. EKF-UI: extended Kalman filter with unknown inputs.
All the identified structural stiffness parameters are compared with the reference stiffness values which are estimated experimentally as shown in Table 2. It is noted that they are in good agreement and the largest identification error is 3.45%, which is a relatively small value. The identification results demonstrated that the proposed EKF-UI is an effective approach for the identification of structural parameters, structural unmeasured responses, and unknown external excitations with good accuracy.
Comparisons of identified and reference stiffness of the five-story structure.
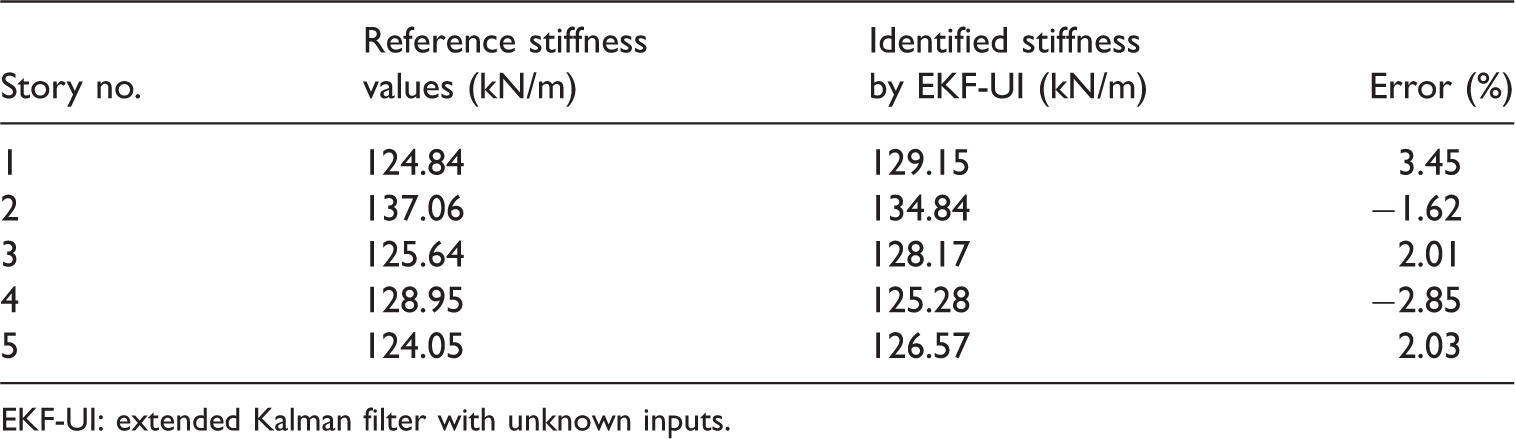
EKF-UI: extended Kalman filter with unknown inputs.
Conclusions
The conventional EKF approach is only applicable when the information of external excitations to structure is available. The authors have proposed an EKF-UI based on data fusion of partially measured displacement and acceleration responses, but the feasibility of proposed EKF-UI is only demonstrated by some numerical simulation examples. In this paper, a lab experiment is conducted to validate the proposed EKF-UI algorithm. Moreover, since structural displacement is difficult to measure accurately in actual situation, data fusion of partially measured strain and acceleration responses is adopted in this experimental validation to prevent the drifts in the estimated structural displacements and unknown external excitations. The identified structural stiffness parameters and structural states by EKF-UI are in good agreement with those identified by the conventional EKF. Also, the identified unknown input is close to the measured external excitation. Therefore, the experimental validation shows that the proposed EKF-UI is an efficient algorithm for real-time simultaneous identification of structural systems and unknown inputs.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research described in this paper is financially supported by the National Natural Science Foundation of China (NSFC) through Grant No. 51678509, the Fundamental Research Funds for the Central Universities through Grant No. 20720160076, the Natural Science Foundation of Guangdong Province through Grant No. 2018A030313921, and Scientific-technological Project from Ministry of Housing and Urban-Rural Development of the People’s Republic of China through Grant No. 2016-K4-046.