
Abstract
Rubber-bearing isolation is one of the most successfully and widely used isolation technologies to provide lateral flexibility and energy dissipation capacity for reducing structural vibration and protecting the superstructure from damage. The seismic performance of the base-isolated structures partly depends on the nonlinear characteristics of the base isolation system. However, it is hard to establish proper mathematical models for the nonlinear hysteretic behaviors of base isolation due to the complexities of nonlinearities. Consequently, it is strongly desired to develop model-free methodologies for the nonlinear hysteretic performance identification with no assumption on the nonlinear hysteretic models of base isolation. In this paper, a novel method is proposed for this purpose. Firstly, the base isolation is in the linear state when the structure is under the weak earthquake, the restoring force is only provided by linear stiffness and viscous damping of base isolation, and the structural physical parameters can be estimated based on the extended Kalman filter approach. Then, the base isolation is in the nonlinear state when the structure is under the strong earthquake. The nonlinear hysteretic restoring forces from base isolation are treated as “unknown fictitious inputs” to the corresponding structural systems without base isolation. The generalized Kalman filter with unknown input algorithm is adopted for the simultaneous identification of the corresponding structural systems and the hysteretic restoring force of base isolation using only partial structural responses. No information about the structure is needed, and the responses at the location of the base isolation are not required, the proposed method is capable of identifying nonlinear characteristics of base isolation by the direct use of partial structural dynamic response. To validate the performances of the proposed method, some numerical simulation examples of identifying nonlinear hysteretic restoring forces of base isolation in different models are used.
Keywords
Introduction
With the gradual establishment of earthquake engineering theory and the further test of the actual earthquake on structural engineering, base isolation has become one of the effective and widely applied methods to reduce structural vibration and damage of major infrastructure and engineering structures by serious earthquakes.1–5 In many isolation structures, rubber-bearing isolation is one of the most successfully and widely used isolation technologies. It is used to set up the flexible rubber-bearing isolation system at the bottom of the superstructure to provide lateral flexibility and energy dissipation capacity for protecting the superstructure from damage.
The seismic performance of the base-isolated structures partly depends on the characteristics of the base isolation system. The force–displacement relation of the typical rubber-bearing isolation is nonlinear. Due to the complexities of the excitation, and the inherent dynamics characteristics of restoring force of the base isolation systems, the response of base-isolated structures subject to strong earthquakes often experiences excursion into the inelastic range. Therefore, in designing base-isolated structures, the nonlinear hysteretic restoring force model of the base isolation system is frequently used to predict structural response and to evaluate structural safety. 3
The nonlinear hysteretic performance of the base-isolated structure has been taken seriously by researchers. Several mathematical models have been proposed in the previous literature for describing the nonlinear behavior of base isolation.1,3,4 Chang 4 constructed the analysis model of laminated rubber bearing using a stiffness summation procedure from Haringx’s theory. Furukawa et al. 3 produced an identification of a base-isolated structure using the prediction error method system identification technique in conjunction with nonlinear state-space models. Using a variety of nonlinear restoring force models and bidirectional recorded seismic responses, several identification are conducted to evaluate the accuracy of the selected models. Bhuiyan et al. 6 proposed an elasto-viscoplastic rheology model of high damping rubber bearings for seismic analysis based on the mechanical behavior of high damping rubber bearings. In this model, the Maxwell model is extended by adding a nonlinear elastic spring and an elasto-plastic model (spring-slider) in parallel. Yin et al. 7 analyzed the nonlinear dynamic behavior of the isolation bearing using the simplified Bouc–Wen model and obtained the parameters of the isolation bearing model by applying the sequential nonlinear least-squares method. They also proposed the adaptive extended Kalman filter approach to identify the parameters and track the parametric variation of rubber-bearing isolated structure online and to identify the displacements of every story using the measured acceleration responses.
The abovementioned method for identification of nonlinear characteristics of rubber-bearing isolator required the assumptions of the proper mathematic models for the rubber bearings. However, it is still a difficult and challenging task to establish a proper mathematical model for a rubber-bearing base isolation system due to the complexity of nonlinear material of rubber bearing and the limited available data in experiments. 10
Recently, researchers have tried to study the identification of nonlinear systems without mathematical models.11–14 Masri and Caughey 11 presented a restoring force surface method, constructing the nonlinear system restoring force surface with state displacement and velocity, which solved the identification problem of nonlinear parameters of single degree of freedom dynamic system. They also proposed a nonlinear parametric reduced-order model, which is completely based on the measurement data of structure dynamic responses. 12 Liu et al. 15 proposed a model-free structural nonlinear restoring force approximated by a power series polynomial and identify structural nonlinear restoring forces and structural systems based on the unscented Kalman filter. Lei and He 10 treated the nonlinear effect of rubber bearing as “fictitious loading” on the linear building under severe earthquake. The proposed new algorithm is based on the sequential Kalman estimator for the structural responses and the least-squares estimation of the “fictitious loading” to identify the nonlinear force of rubber-bearing isolator. But the limitation of this method is that the horizontal acceleration response of the isolation layer is required. Therefore, identification of the nonlinear characteristics of rubber-bearing isolator without mathematical models using only partial measurements of structural responses is still an important but challenging task.
In this paper, a novel two-step approach is proposed to identify the nonlinearities of model-free rubber-bearing isolator in structures using only partial measurements of structural dynamic responses. Firstly, the rubber-bearing isolators are in the linear state when the structure is under weak earthquake, the restoring force is only provided by linear stiffness and viscous damping of rubber-bearing isolator, the structural physical parameters can be estimated based on the extended Kalman filter (EKF) approach. Then, the rubber-bearing isolators are in the nonlinear state when the structure is under strong earthquake. The nonlinear hysteretic restoring forces from rubber-bearing isolator are treated as “unknown fictitious inputs” to the corresponding structural systems without base isolation. The generalized Kalman filter with unknown input (GKF-UI) algorithm 16 is adopted for the simultaneous identification of the corresponding structural systems and the hysteretic restoring force of rubber-bearing isolator using only partial structural responses. No information about the structure is needed, and the responses at the location of the rubber-bearing isolator are not required, the proposed method is capable of identifying nonlinear characteristics of base isolation by the direct use of partial structural dynamic response measurements. To validate the performances of the proposed method, some numerical simulation examples of identifying hysteretic restoring forces of base isolation in different models are used. Simulation results demonstrate that the proposed algorithms are capable of identifying the nonlinear properties of rubber-bearing isolator with good accuracy.
Identification algorithm
For an n-storied shear building with a rubber-bearing isolation system subject to earthquake ground motion as shown by Figure 1, the equation of relative motion with respect to the ground can be written as


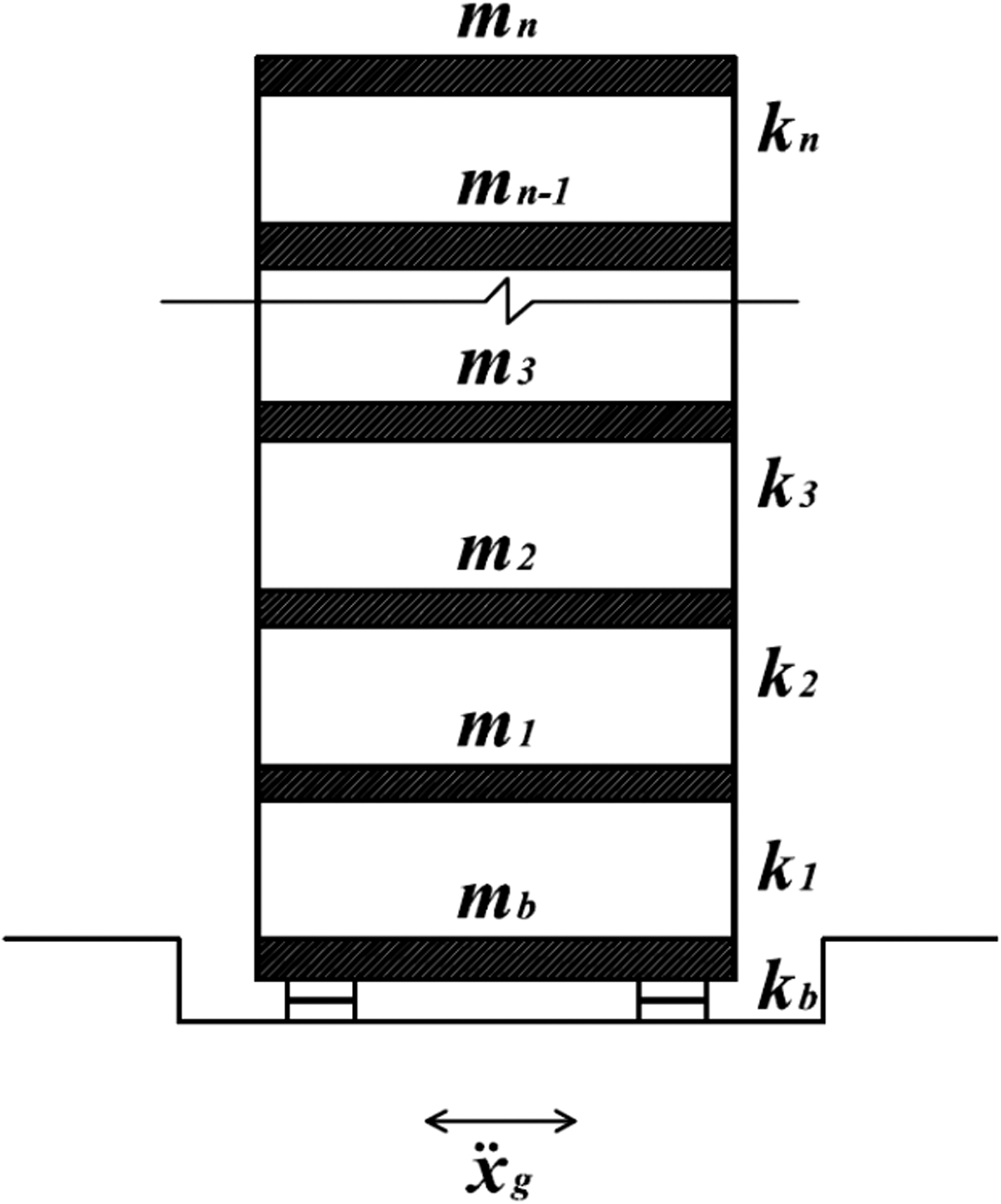
Schematic diagram of base-isolated structure.
Identification of the structures in linear state
When the structure is under weak earthquake, the base isolation is in the linear state. Thus, the nonlinear plastic restoring force

The extended state vector is defined as

Equation (3) can be written into the following extended state equation for the extended state vector

Usually, limited acceleration sensors are installed in the structure, so the observation equation by limited accelerometers installed in the structure at time


Then, the structural stiffness parameters, damping coefficient, and the linear stiffness of base isolation can be estimated based on the EKF approach as follows.
Let


The extended Kalman filter mainly consists of the two procedures: the time update (prediction) and measurement update (correction).
The first procedure is the time update (prediction), where

Based on equations (5)–(8) and (10), it can be derived that

The second process of the EKF is the measurement update (correction) procedure, where


Then, the error for the measurement updated

The covariance matrix for error

Thus, the extended state vector
It is worth noting that only the identification result of structural stiffness and damping parameters are used in the second step to identify the nonlinear restoring force of the base isolation without mathematical model.
Identification of nonlinear property of base isolation
When the structure is subjected to strong earthquake, the base isolation is in nonlinear state, i.e.,

Thus, the recent GKF-UI algorithm is adopted for the real-time identification of the “unknown fictitious inputs” with only partial measurements of structural responses.
A brief review of recent GKF-UI
The equation of motion of n-dimensional linear structure under unknown external excitation is as follows

In order to overcome the limitations of requiring the measurement of the response at the location of external excitation, it is assumed that the excitation to be identified is linear in the sampling interval using discrete method of first-order hold sampling instead of zero-order hold sampling.


The discrete observation equation by limited accelerometers installed in the structure at time

The predicted

The estimated


Under the condition that the number of response measurements is larger than the number of unknown external excitations,

By inserting the expression of


The error covariance matrix of

The error covariance matrix of

The error covariance matrix of
The error covariance matrix

The GKF-UI algorithm is achievable for the station that the responses at location of unknown external force are not measured.
Identification of the nonlinear restoring forces of base isolation
Based on equation (19), the motion equation (16) can be expressed as the state equation of the system in the discrete form

Only partial structural responses can be measured. Based on equation (20), the discrete form of the observation equation at time

When the response at location of “unknown fictitious inputs” is measured,
To circumvent the drift problem in the identification of displacement and nonlinear restoring force, partial measured strain is added. Data fusion of measured strain and acceleration responses are used in the observation equation, the measurement matrix

For column elements in shear building, the displacement vector of column element node

Then, the identified nonlinear plastic restoring forces of base isolation

Numerical example
A nine-storied shear building with rubber-bearing isolation is used as a numerical example to demonstrate and verify the proposed identification algorithm. The linear structure parameters are selected:
The structural parameters of base isolator are selected:
Seismic ground motion is assumed as El-Centro earthquake with larger peak ground amplitudes, the excitation time was 31.2 s, and the sampling frequency was 1000 Hz.
Identification of nonlinear property of base isolation simulated by Bouc–Wen model
It is assumed that the force-deformation relation of base isolation is modeled by Bouc–Wen nonlinear hysteretic model. Its nonlinear restoring force can be expressed as


Then, the total nonlinear restoring force of the base isolator is expressed as

It worth noting that the structural stiffness parameters, damping parameters and Bouc–Wen nonlinear model of base isolator are only used to simulate the structural responses, which are unknown in the identification process.
In the numerical example, only five accelerometers are deployed on the building, i.e., the 1st, 3rd, 5th, 7th, and 9th floor acceleration responses are measured. The acceleration responses at the location of base isolator are not measured. To circumvent the drift problem in the identification of displacement and nonlinear restoring force, partial measured strain is added. In the numerical example, the measured strain at the 1st floor of the building is added. Data fusion of the measured strain and the above five accelerations are used in the observation equation. To consider the influence of measurement noise on the identification results, all the measured acceleration responses are simulated by superimposing the theoretically computed responses onto the corresponding stationary white noise with 2% noise-to-signal ratio in RMS.
Identification results of linear system
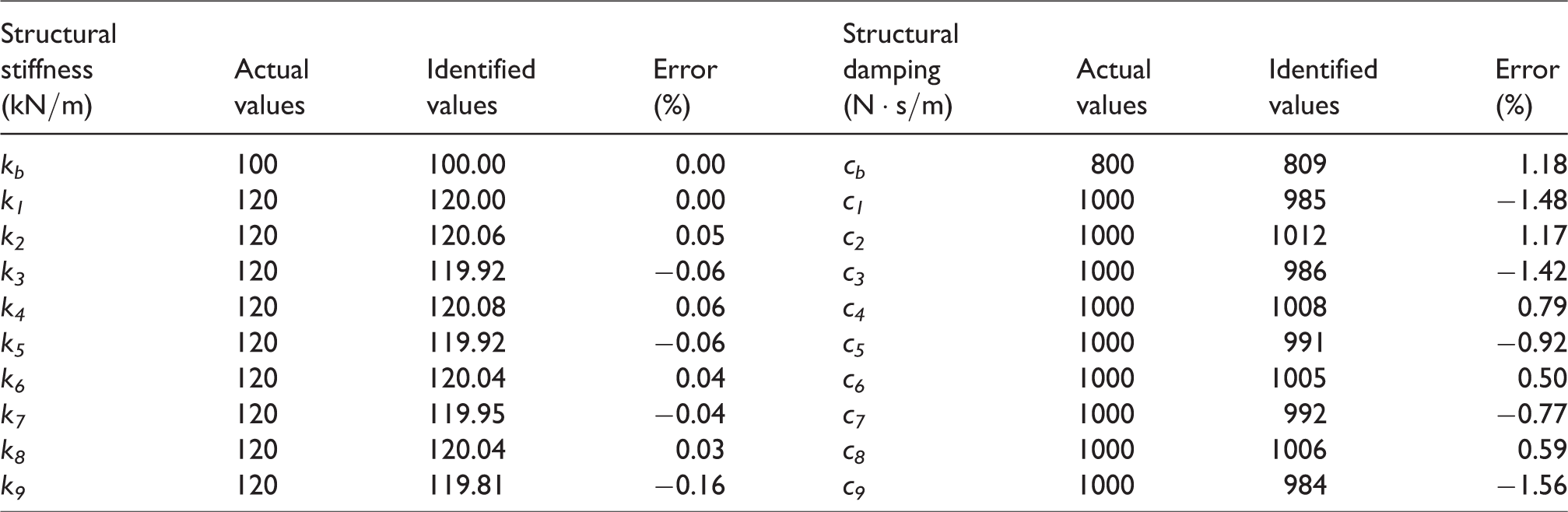
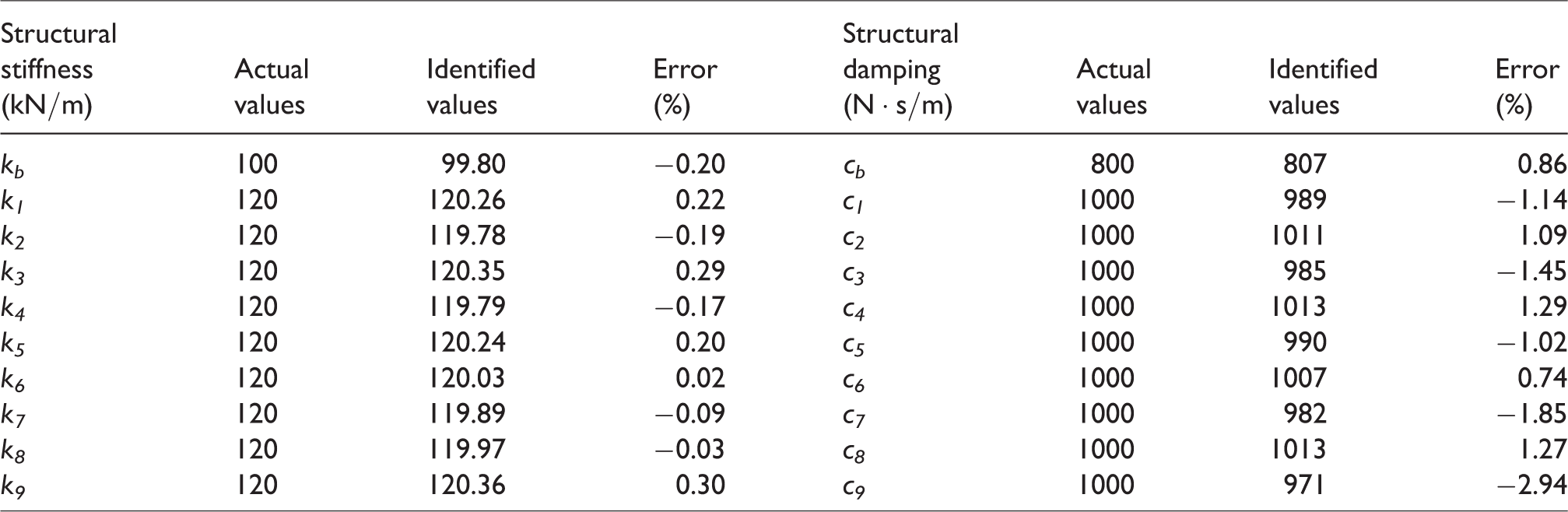
When the peak ground amplitude (PGA) of the earthquake is small (PGA = 0.10 g), the whole structures including base isolator are in linear state. Based on the identification algorithm in the “Identification of the structures in linear state” section, the linear structural parameters are identified and compared with their actual values in Table 1. From the comparison, it is shown that the proposed algorithm can identify linear structural parameters with good accuracy. These identified linear structural parameters will be used for the identification of nonlinear characteristic of base isolator.
Comparison of the identification results of linear structural parameters with actual values.
Identification results of nonlinear system
When the building is subjected to strong earthquake with a large PGA value (PGA = 0.5 g), the base isolator is in the nonlinear state. In the numerical example, it is assumed that the nonlinear hysteretic restoring force of base isolator is modeled by Bouc–Wen model. However, this nonlinear model is only used in the numerical simulation of structural responses and not used in the identification procedure by the proposed algorithm. Based on the proposed algorithm in the “Identification of nonlinear property of base isolation” section, the nonlinear hysteretic restoring forces of base isolator can be identified.
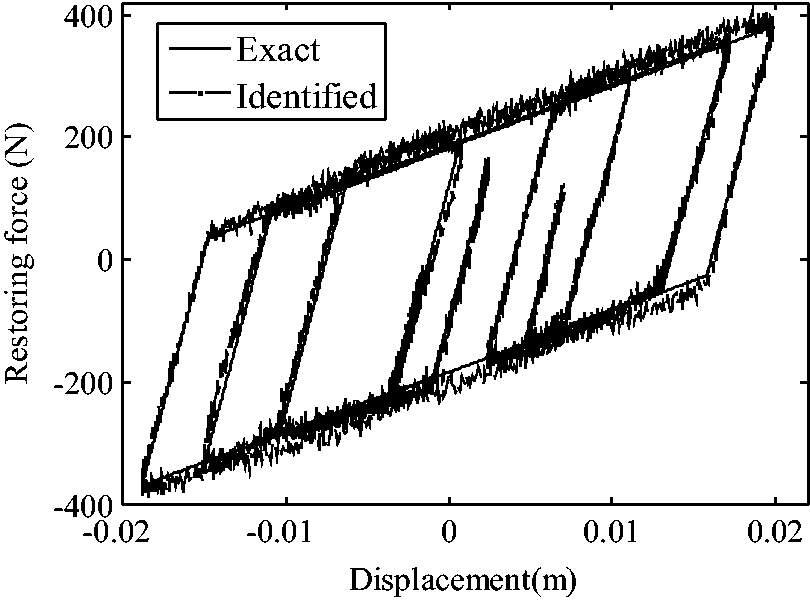
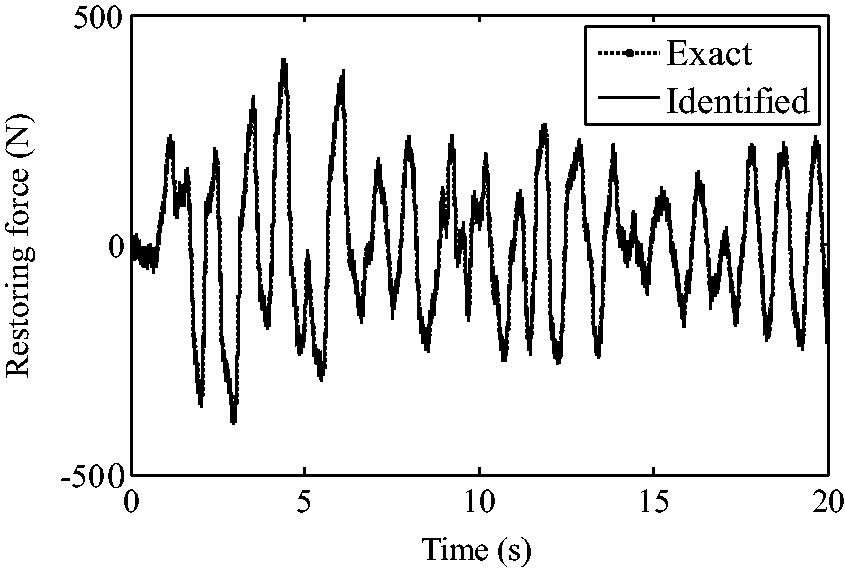
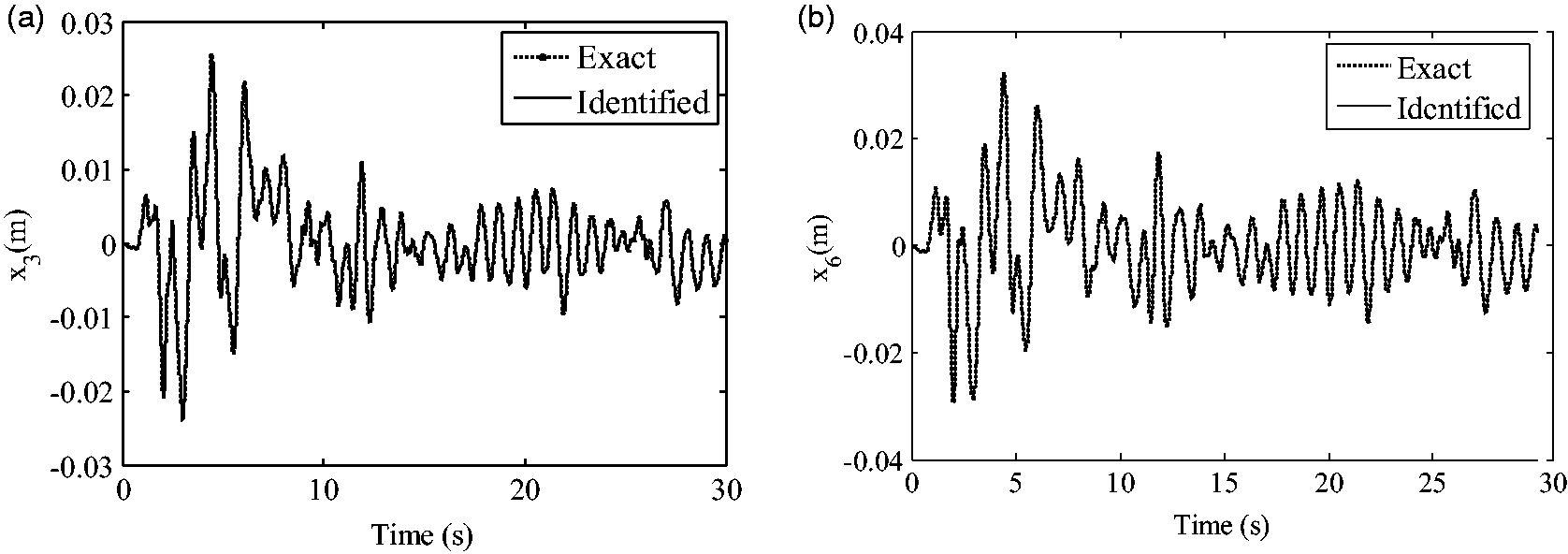
The comparison of identified nonlinear hysteretic restoring forces of base isolator with actual restoring force are shown in Figures 2 and 3, the comparison of the identified relative displacement with actual value are shown in Figure 4. From the comparison above, the identification of nonlinear hysteretic restoring forces and displacement are good. Thus, it is shown that the proposed algorithm can identify the nonlinear hysteretic restoring forces of model-free base isolator with good accuracy.
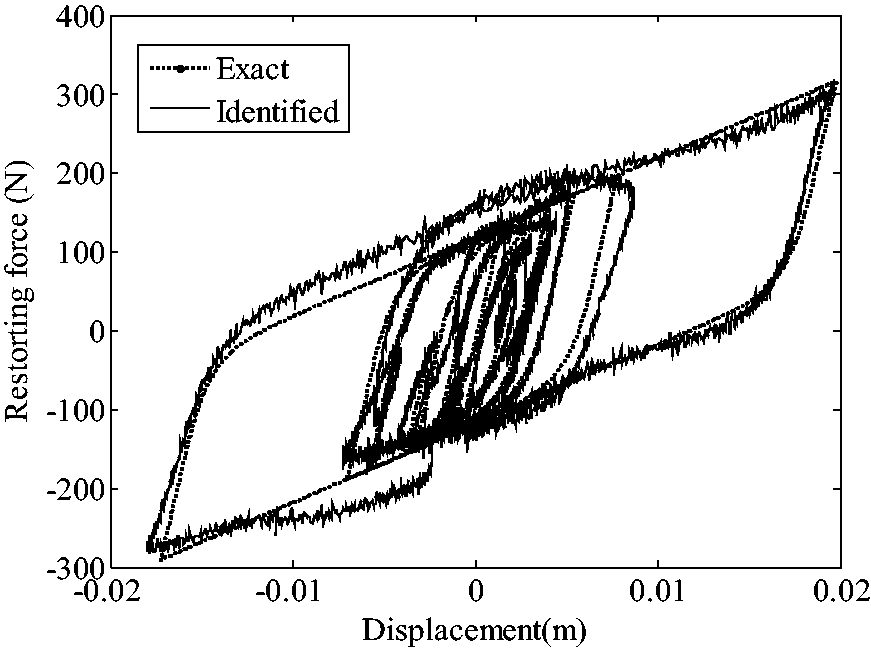
Comparison of identified restoring force of base isolator with actual restoring force.
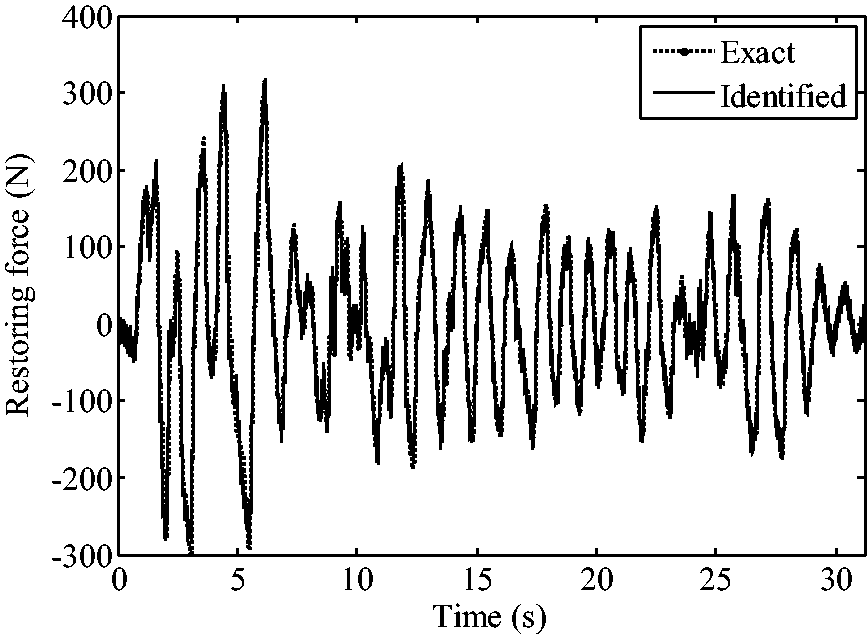
Comparison of time-history curve of identified restoring force of base isolator with actual restoring force.
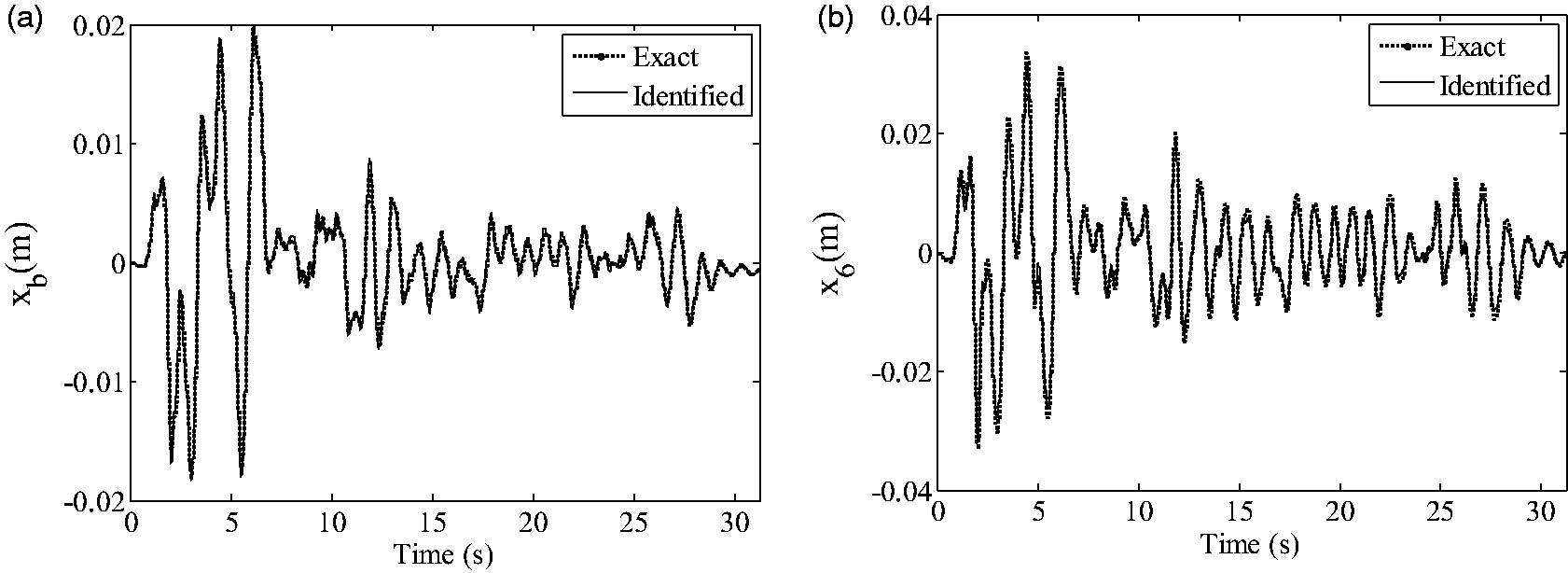
Comparison of the identified relative displacement with actual value. (a) The isolation layer. (b) The sixth floor.
Identification of nonlinear property of base isolation simulated by bilinear model
It is assumed that the force-deformation relation of base isolation is modeled by bilinear hysteretic nonlinear model. Its nonlinear restoring force can be expressed as



Then, the total nonlinear restoring force of the base isolator is expressed as

Also, the structural stiffness parameters, damping parameters, and bilinear hysteretic nonlinear model of base isolator are only used to simulate the structural responses, which are unknown in the identification process.
In the numerical example, also the same five accelerometers and one strainometer are deployed on the building, i.e., the acceleration responses of the 1st, 3rd, 5th, 7th, and 9th floor and the strain of the 1st floor are measured. The acceleration responses at the location of base isolator are not measured. Data fusion of the measured strain and the five accelerations are used in the observation equation. All the measured acceleration responses are simulated by superimposing the theoretically computed responses onto the corresponding stationary white noise with 3% noise-to-signal ratio in RMS.
Identification results of linear system
When the peak ground amplitude of the earthquake is small (PGA = 0.10 g), the whole structures including base isolator are in linear state. Based on the identification algorithm in the “Identification of the structures in linear state” section, the linear structural parameters are identified and compared with their actual values in Table 2. From the comparison, it is shown that the proposed algorithm can identify linear structural parameters with good accuracy. These identified linear structural parameters will be used for the identification of nonlinear characteristic of base isolator.
Comparison of the identification results of linear structural parameters with actual values.
Identification results of nonlinear system
When the building is subjected to strong earthquake with a large PGA value (PGA = 0.5 g), the base isolator is in the nonlinear state. In the numerical example, it is assumed that the nonlinear hysteretic restoring force of base isolator is modeled by bilinear model which is only used in the numerical simulation of structural responses. Based on the proposed algorithm in the “Identification of nonlinear property of base isolation” section, the nonlinear hysteretic restoring forces of base isolator can be identified.
The comparison of identified nonlinear hysteretic restoring forces of base isolator with actual restoring force are shown in Figures 5 and 6, the comparison of the identified relative displacement with actual value are shown in Figure 7. From the comparison above, the identification of nonlinear hysteretic restoring forces and displacement are good. Thus, it is shown that the proposed algorithm can identify the nonlinear hysteretic restoring forces of model-free base isolator with good accuracy.
Comparison of identified restoring force of base isolator with actual restoring force.
Comparison of time-history curve of identified restoring force of base isolator with actual restoring force.
Comparison of the identified relative displacement with actual value. (a) The third floor. (b) The sixth floor.
Conclusions
In this paper, a new two-step approach is proposed to identify the nonlinearities of rubber bearings in model-free base-isolated buildings using only partial measurements of structural seismic responses. In the first step, the structural physical parameters can be estimated based on EKF approach when the structure is subject to weak earthquake and base isolators are in the linear state. In the second step, the nonlinear hysteretic restoring forces from base isolators, treated as “unknown fictitious inputs” to the corresponding structural systems without base isolators, can be simultaneously identified with corresponding structural systems by GKF-UI when the structure is subject to strong earthquake and base isolators are in the nonlinear state. To circumvent the drift problem in the identification of displacement and “unknown fictitious inputs,” data fusion of measured strain and acceleration responses are used in the observation equation. No information about the structure is needed, and no acceleration responses at base isolator are required, the proposed method is capable of identifying hysteretic restoring forces of base isolator by partial structural dynamic response measurements. Such an innovation approach can overcome the limitation of the previous method 10 to observe the acceleration responses at location of base isolation. To validate the performances of the proposed method, two numerical simulation examples of identifying hysteretic restoring forces of base isolation in different models are used with good accuracy.
In this paper, the proposed method is applicable to the cases when earthquake is known. Further research on the identification of the characteristics of the base isolation system when earthquake is unknown should be studied. To further testify the identification algorithms, experimental tests should be conducted in a future work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research described in this paper is financially supported by the Key Program of the National Natural Science Foundation of China (NSFC) through the Grant No. 51838006.