
Abstract
In this paper, a two-dimensional Timoshenko beam theory is adopted to establish a vibration analysis model for flexible spur ring gears. Based on this model, the vibration characteristics of a ring gear subjected to various connection types are investigated, and the corresponding vibration modes are classified and defined. It is demonstrated that the vibration characteristics of a ring gear vary for different connection types. When vibration analysis and design are performed for a planetary gear set or ring gear, the boundary condition of the ring gear model must closely match that of the actual connection type. When a ring gear is applied as the output component, the vibration modes are classified as rigid body, flexural deflection, and extensible deflection modes. Correspondingly, for bond connections, the vibration modes of a ring gear are classified as flexural deflection and extensible deflection modes. Furthermore, for a bolt connection, only flexural deflection modes arise as vibration modes of the ring gear, while for fixed connections, the vibration modes are local flexural deflection modes.
Introduction
Because of their large transmission ratios, small size, and excellent bearing capacity, planetary gear sets are widely used in aerospace, marine, and energy applications. The ring gear is a key component for generating vibration and transmission in a planetary gear set. In general, the ring gear is connected to the outer frame of the system.1,2 To reduce the weight and improve the load distribution, a thin-walled ring gear is used in most planetary gear sets.3,4 With the development of high-speed, high-load, and lightweight planetary gear sets, the meshing excitation frequency of the planetary gear set can easily approach or coincide with a high-order natural frequency of the thin-walled ring gear, thus causing greater vibration and noise. For example, a ring gear in the planetary gear set of an American OH-58 Kiowa helicopter cracked due to vibrations. 5 Therefore, to establish an accurate mathematical model of the ring gear, researchers must consider its flexibility. In 2006, Wu and Parker 6 established an analysis model of a flexible spur ring gear with an elastic foundation using the perturbation method and the Galerkin method. The vibration characteristics of the thin-walled ring gear of the OH-58 helicopter planetary gear set were analyzed as an example, and the flexural deflection modes were revealed. On this basis, the same authors7,8 developed a dynamic model of a planetary gear set with a flexible ring gear and studied the inherent characteristics. Meanwhile, the vibration modes of the planetary gear set were classified as rotational, translational, planetary, and flexural deflection modes. In addition, Wu and Parker further studied the parametric instability 9 and parametric sensitivity 10 of the ring gear. Although flexible ring gears have already been considered in the literature,6–10 the extensible deflection modes of a ring gear have not yet been determined. Abousleiman and Velex11,12 used three-dimensional (3D) beam elements to establish a single-stage, spur/helical, dynamic model of a planetary gear set with flexible ring gears. Wei et al. 13 used a similar modeling method and developed a 3D multistage dynamic model of a spur planetary gear set that considered structural flexibility. The above studies11–13 used 3D beam elements to develop vibration analysis models for flexible spur ring gears, which undoubtedly increases the number of degrees of freedom (DOFs) and does not reveal the flexural or extensible deflection modes of the spur ring gear. Tanna and Lim 14 used the finite element method (FEM) to analyze the vibration characteristics of unconstrained 3D ring gears and divided the vibration modes into four categories: in-plane and out-of-plane flexural deflection modes, extensional deflection modes, and torsional modes. Subsequently, Wang et al. 15 used the FEM to study the free vibration of unconstrained, 2D spur ring gears. Two types of typical vibration modes were observed: flexural and extensible deflection modes. The vibration characteristics of unconstrained ring gears have also been accurately analyzed by FEM in the literature.14,15 However, the number of DOFs in the finite element model is excessively large, which is generally not suitable for dynamical design. Moreover, because a thin-walled ring gear can be simplified as a flexible ring, scholars have also studied the ring vibration. Love 16 investigated the natural frequencies and vibration modes of 3D unrestrained rings and obtained four typical vibration modes: in-plane and out-of-plane flexural deflection modes, extensible deflection modes, and torsional modes. Rao and Sundararajan 17 studied the free vibration of circular rings with radial supports. Moreover, Sahay and Sundararajan 18 proposed a method for analyzing the flexural deflection of rings, but their approach was limited by its requirement for cyclic symmetry. Detinko 19 used the Galerkin method to investigate the vibration characteristics of a thick ring with multiple radial spring supports. In addition, the transfer matrix method20–22 has been used to establish an analytical model of a ring with a radial spring support. Forbes and Randall 23 studied the resonance phenomena of a flexible ring under a moving load, and Zhou et al. 24 analyzed the inherent characteristics of a 3D ring with sectorial cross-sections using the Ritz method. Lacarbonara et al. 25 investigated the flexural deflection modes of a 2D unconstrained ring based on the method of multiple scales. The above-described studies primarily investigated the vibration characteristics of a ring under unconstrained or radial spring support conditions; furthermore, research on the influence of the connection type on the vibration characteristics of a flexible ring is limited. Moumnassi et al.26,27 used an extended FEM to establish an analytical model of a thick-walled cylinder and calculated its stress distribution. Atroshchenko et al. 28 constructed a mathematical model of a quarter annulus using a geometry-independent field approximation and studied the effect of mesh refinement on the results. The extended FEM and geometry-independent field approximation in literature26–28 represent general modeling methods. Compared with the above methods, the flexible ring gear model based on beam elements not only satisfies calculation accuracy but also has fewer DOFs; thus, this model can be used to study a complex planetary gear set with a flexible ring gear for different connection types, with fewer DOFs and higher precision.
Because of the limitations in design requirements, manufacturing, and assembly, the connections between a ring gear and the outer frame often vary for different products. However, investigations on the vibration characteristics of a ring gear with different connection types are lacking. In engineering practice, designers often neglect the influence of specific connection types on the vibration characteristics of a ring gear, which leads to inaccurate vibration predictions and unsatisfactory vibration and noise reduction. In this paper, the spur ring gear is chosen as the research object, and an analysis model for the ring gear is established to consider tension, transverse shear, and bending deformation. Based on this model, the natural frequencies and vibration modes of the ring gear are investigated for different typical connection types, including a bond connection, bolt connection, and fixed connection as well as the connectionless condition, in which the ring gear is considered as the output component. Based on this study, scholars can further evaluate various aspects of the spur planetary gear set with a flexible ring gear for different connection types, such as studies on dynamic modeling, inherent characteristics, dynamic response, dynamic stability, and vibration and noise suppression.
Two-dimensional flexible ring gear model
Two-dimensional Timoshenko beam
Although the spur ring gear is a 3D component and has a spatial vibration mode in practical engineering, it is generally accepted that the load on a spur ring gear has a planar distribution. Meshing excitation of the spur planetary gear set cannot induce a spatial vibration mode. Therefore, the spatial vibration mode of the spur ring gear can be neglected. In this paper, the 2D Timoshenko beam element is used to establish a vibration analysis model for a flexible spur ring gear. The tension, transverse shear, and bending deformation of the ring gear are considered. The model has a low calculation complexity but can still thoroughly describe the inherent characteristics of a flexible spur ring gear.
Figure 1 shows a schematic diagram of the 2D beam element. The element contains two nodes, with three DOFs at each node. The displacement vector for two nodes in the local coordinate system is
29

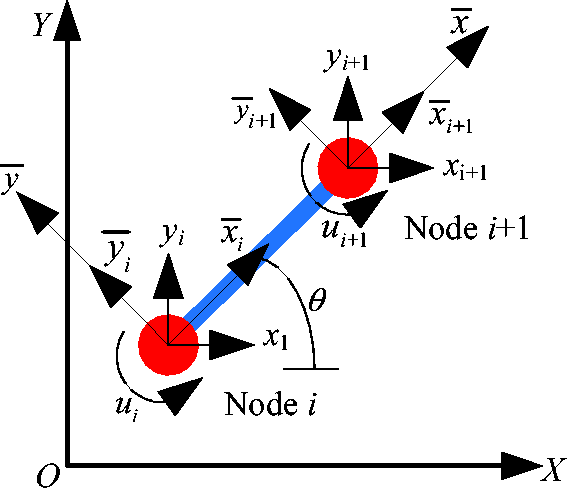
Relationship between the local and overall coordinate systems for a 2D Timoshenko beam.
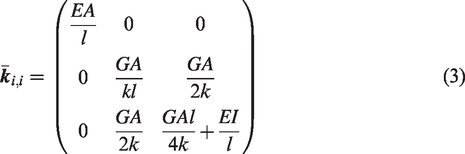
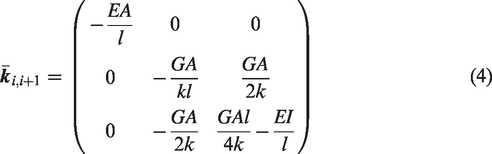
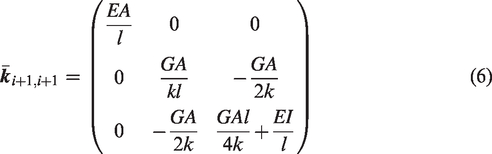
The stiffness matrix of the beam element in the local coordinate system is
29


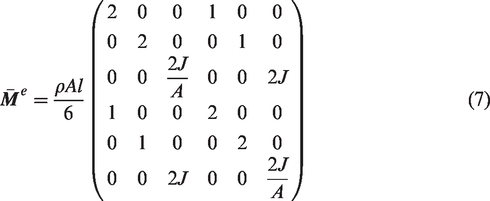
To obtain more accurate computational results and mode shapes, the distributed mass matrix is used
29
Flexible ring gear model
To ensure computational accuracy, efficiency, and symmetry in the ring gear structure and boundary, the ring gear is divided into p rectangular beam elements (Figure 2), where p is an integer multiplied by the number of ring gear teeth. Herein, the numbers 1, 2, 3,…, i,…, p represent the points at which two adjacent beams are connected, where the boundary conditions (connections or loads) are applied.
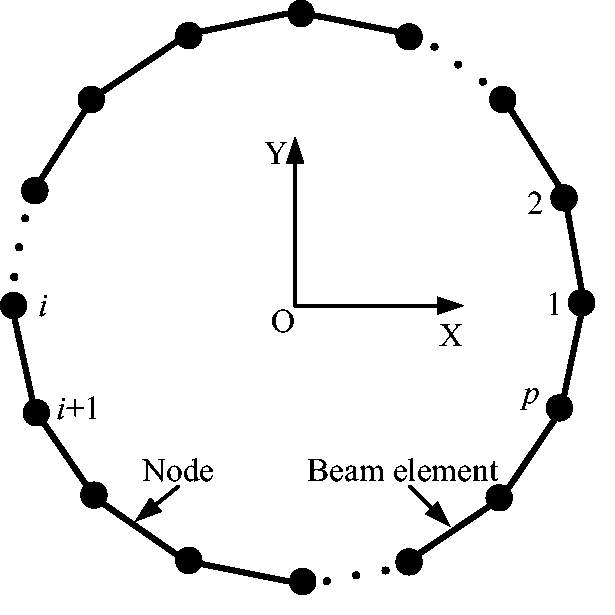
Ring gear divided into rectangular beams.
For each beam element in the ring gear model, the local coordinate system is different, and it is difficult to combine the different systems. For convenience, the local coordinate system of each element is transformed to the overall coordinate system using a coordinate transformation. Therefore, an overall coordinate system (O–X–Y) is established, as shown in Figure 2. The origin O is the center of the ring gear, and the horizontal and vertical directions are viewed as the x- and y-axes. The displacement vector of each element in the overall coordinate system is

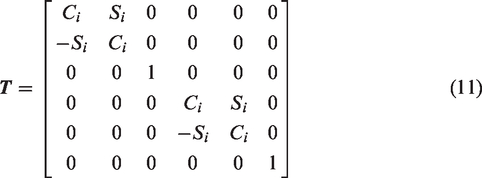
As shown in Figure 1, the transformation relationship for node i from the local to overall coordinate system is

Hence, the displacement vector for beam element i in the overall coordinate system is

Furthermore, the coordinate transform matrix is
The element mass matrix



Finally, a dynamic model of the ring gear can be obtained by combining the characteristic matrices of each element in the overall coordinate system, using the position relationship illustrated in Figure 2

Because of limitations in design requirements, manufacturing, and assembly, the connections between a ring gear and the outer frame often vary for different products. In this study, four typical connection types that are utilized in engineering are studied, namely, the bond, bolt, and fixed connections and the connectionless type. Corresponding schematic diagrams are shown in Figure 3. The boundary conditions for these connection types are represented in detail in Figure 4.
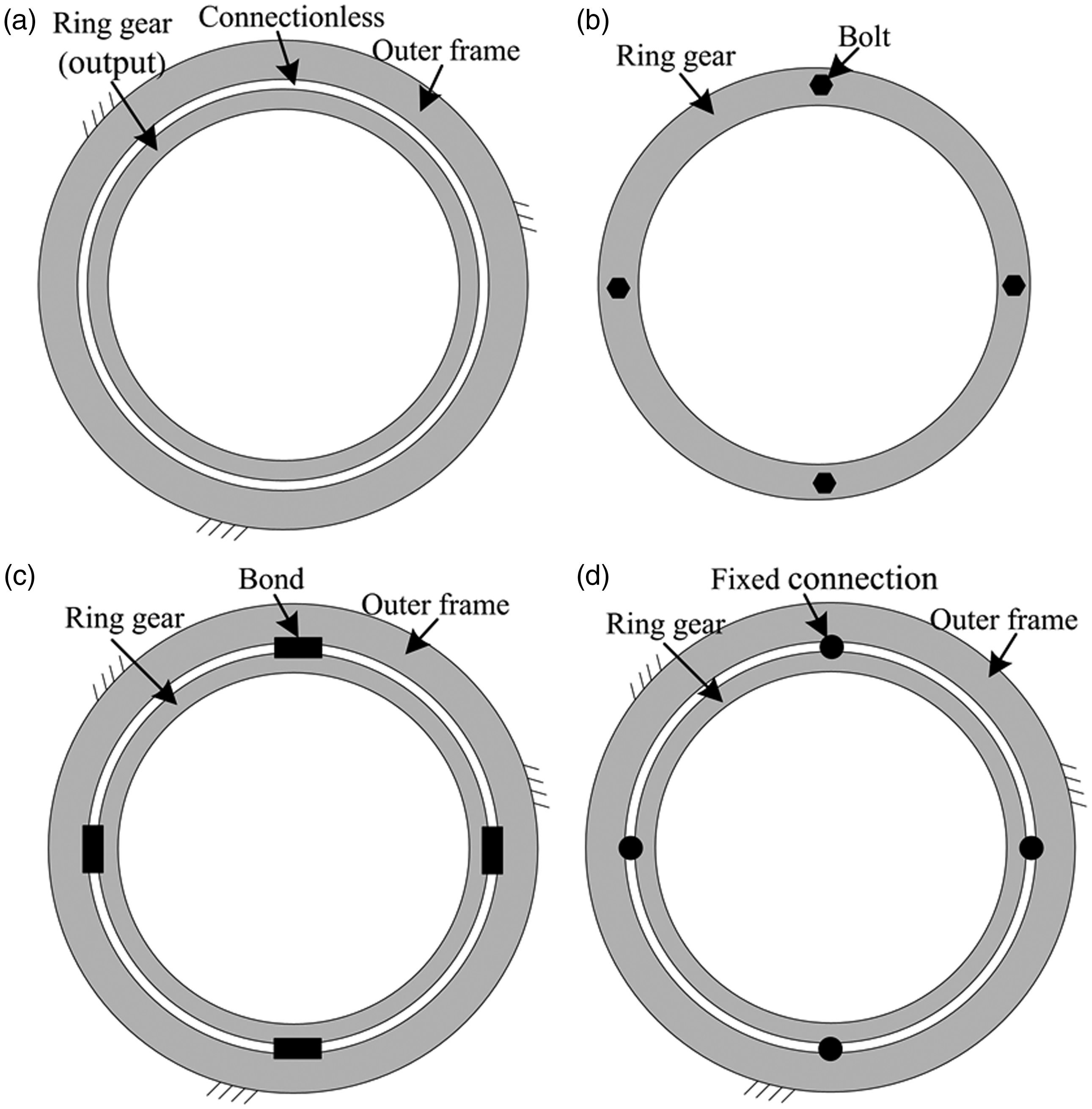
Schematic illustration of the different connection types: (a) connectionless (the ring gear is used as the output component), (b) bolt connection, (c) bond connection, and (d) fixed connection.
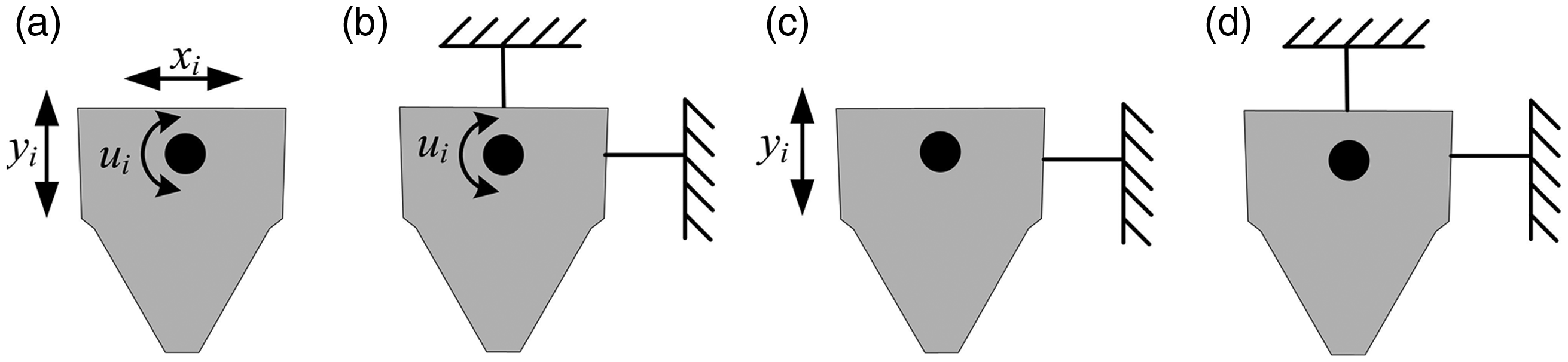
Boundary conditions applied to node i in Figure 2 for (a) connectionless (the ring gear is used as the output component), (b) bolt connection, (c) bond connection, and (d) fixed connection conditions.
If the ring gear is used as the output component of a planetary gear set, the constraint condition of the ring gear can be simplified as a free boundary. Therefore, both lateral and torsional motions of the connection position are allowed (Figure 4(a)), and the boundary condition is given as

If a bolt connection is applied for node i, only rotation is allowed (Figure 4(b)), and the boundary condition is given as

If a bond connection is employed at node i, only radial displacement is allowed (Figure 4(c)), and the boundary condition is given as

If a fixed connection is applied at node i, the DOFs of the connection position are constrained (Figure 4(d)). Therefore, the boundary condition is given as

When a DOF at the connection node is constrained, the rows and columns corresponding to the DOF constrained in the global matrix are omitted. Therefore, a dynamic model of the flexible ring gear can be obtained for the four different connection types.
Vibration characteristic analysis
An inherent characteristic analysis of a flexible ring gear is necessary not only to avoid resonance, but also to determine its dynamic characteristics. When the external load


Connectionless case
As an example, a spur ring gear is analyzed. The ring gear parameters and material properties are listed in Table 1. When the ring gear is used as the output component of a planetary gear set, if the ring gear speed ωr is small, the influence of gyroscopic effects and centripetal load on the vibration characteristics can be neglected. Therefore, the natural frequencies and vibration modes of the ring gear can be calculated using equation (21), as shown in Figure 5.
Ring gear parameters and material properties.

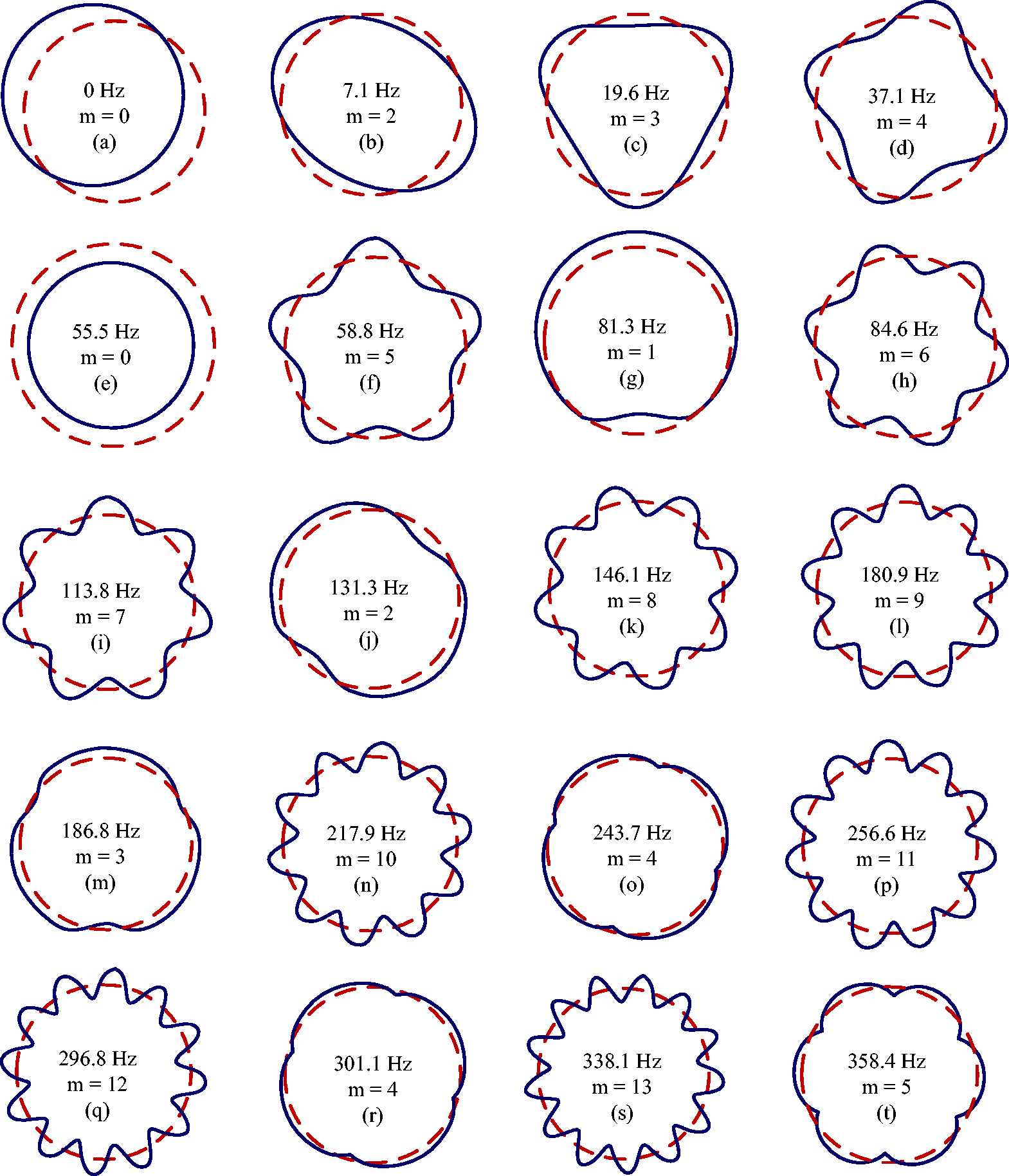
Modal shapes for the case in which the ring gear is the output component, where m denotes the wave number.
The DOFs and natural frequency range of the flexible ring gear model for different connection types are primarily determined by the constraint condition. In this example, the ring gear has 96 teeth and is divided into 96 beam elements and nodes. When the ring gear is used as the output member of the planetary gear set, the constraint condition of the ring gear can be simplified as a free boundary. Therefore, the model has a total of 288 DOFs (96 × 3 = 288), and the natural frequency range is 0–3896 Hz. Because of the symmetry of the ring gear and the boundary conditions, all of the modes have two identical natural frequencies (multiplicity of two) because the free boundary has a rigid body mode (natural frequency of 0) and an elastic mode (natural frequency greater than 0). As shown in Figure 5, the mode shapes of the ring gear are divided into three categories: (1) rigid body modes (Figure 5(a)), (2) flexural deflection modes (Figure 5(b) to (d), (f), (h), (i), (k), (l), (n), (p), (q), and (s)), and (3) extensible deflection modes (Figure 5(e), (g), (j), (m), (o), (r), and (t)). These three vibration modes for the unconstrained ring gear are consistent with findings reported in the literature. 15
Bond connection
The natural frequencies and vibration modes of the ring gear are shown in Figure 6 for the case with four bond connections. Because the bond connection introduces a constraint boundary (only radial motion at the connection node is allowed), the ring gear exhibits only elastic modes (natural frequency greater than 0) without a rigid body mode (natural frequency of 0). The natural frequency range spans 7–3890 Hz, and the model has 280 DOFs (96 × 3 – 2 × 4 = 280). The elastic modes of the ring gear can be classified as flexural deflection modes (Figure 6(a) to (c), (e) to (g), (i) to (k), (m) to (o), and (q) to (s)) and extensible deflection modes (Figure 6(d), (h), (l), (p), and (t)). Because of the symmetry of the ring gear and the boundary condition, all of the odd-numbered wave modes have two identical natural frequencies (multiplicity of two), except for the first-order mode, which has a single natural frequency, and all of the even-numbered wave modes have two distinct eigenvalues. In this example, four bond connections are used, and all connection positions are symmetrical. Therefore, extensible deflection is observed only for the even-numbered wave modes.
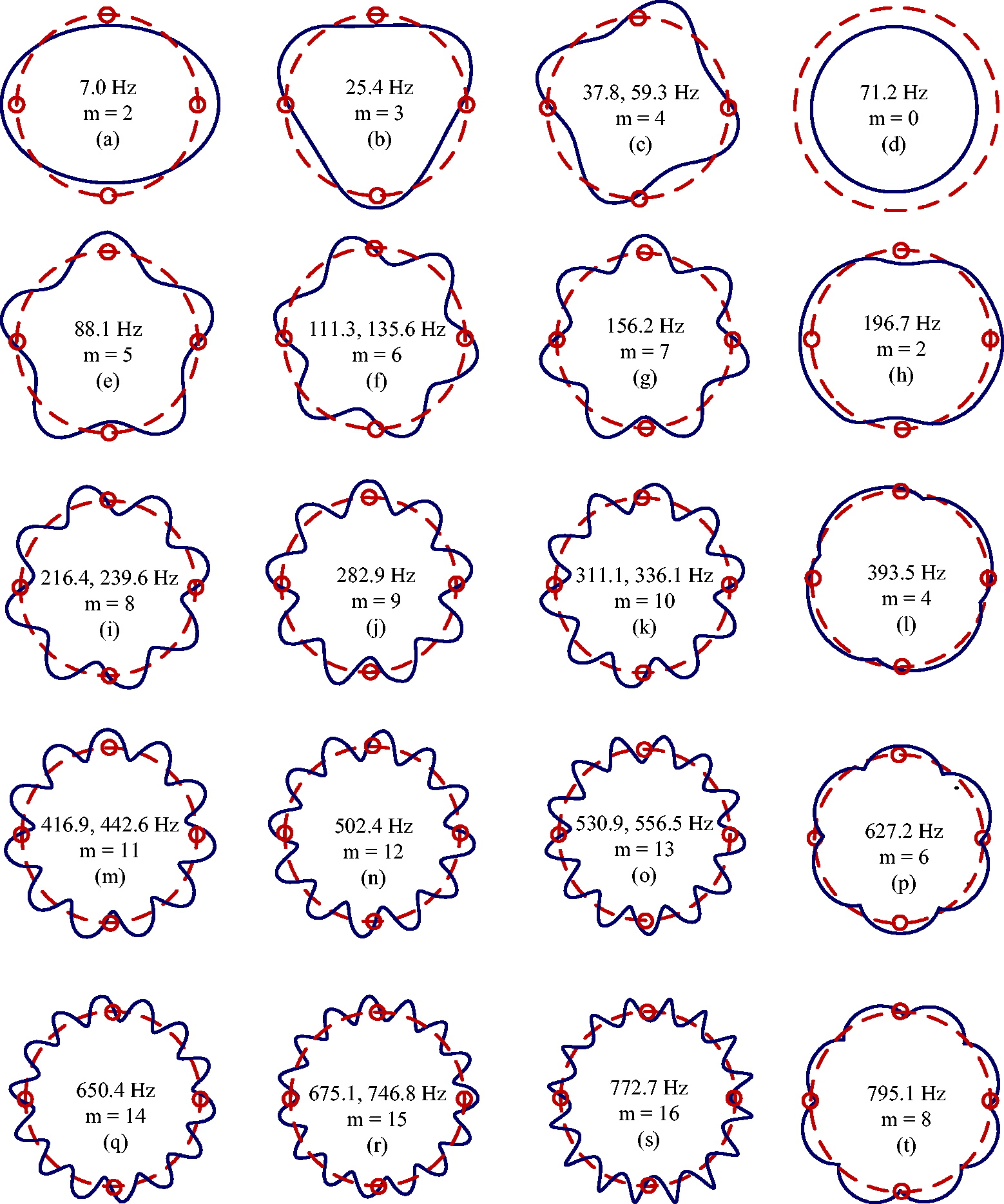
Modal shapes of the ring gear in the case of bond connections, where m denotes the wave number.
Bolt connection
The natural frequencies and vibration modes of the ring gear in the case of four bolt connections are shown in Figure 7. In this case, the bolt connection introduces a constraint boundary (lateral displacement of the connection position is constrained), which allows only elastic modes (natural frequency greater than 0) without a rigid body mode (natural frequency of 0). The ring gear model has 280 DOFs (96 × 3 – 2 × 4 = 280), and its natural frequencies have a range of 33–3893 Hz. The characteristics are similar to those for the bond connection; with the exception of the first-order mode, which has a single natural frequency, the odd-numbered wave modes of the ring gear have two identical natural frequencies (multiplicity of two), and the even-numbered wave modes have two distinct natural frequencies. It was found that the symmetry of the connection positions and the ring gear structures led to a multiplicity of two. For the case in which only bolt connections are used, transversal displacement at connection point i is constrained by the bolt connection. Therefore, the ring gear vibration does not exhibit rigid body modes or extensible deflection modes, but only flexural deflection modes (Figure 8(a) to (l)).
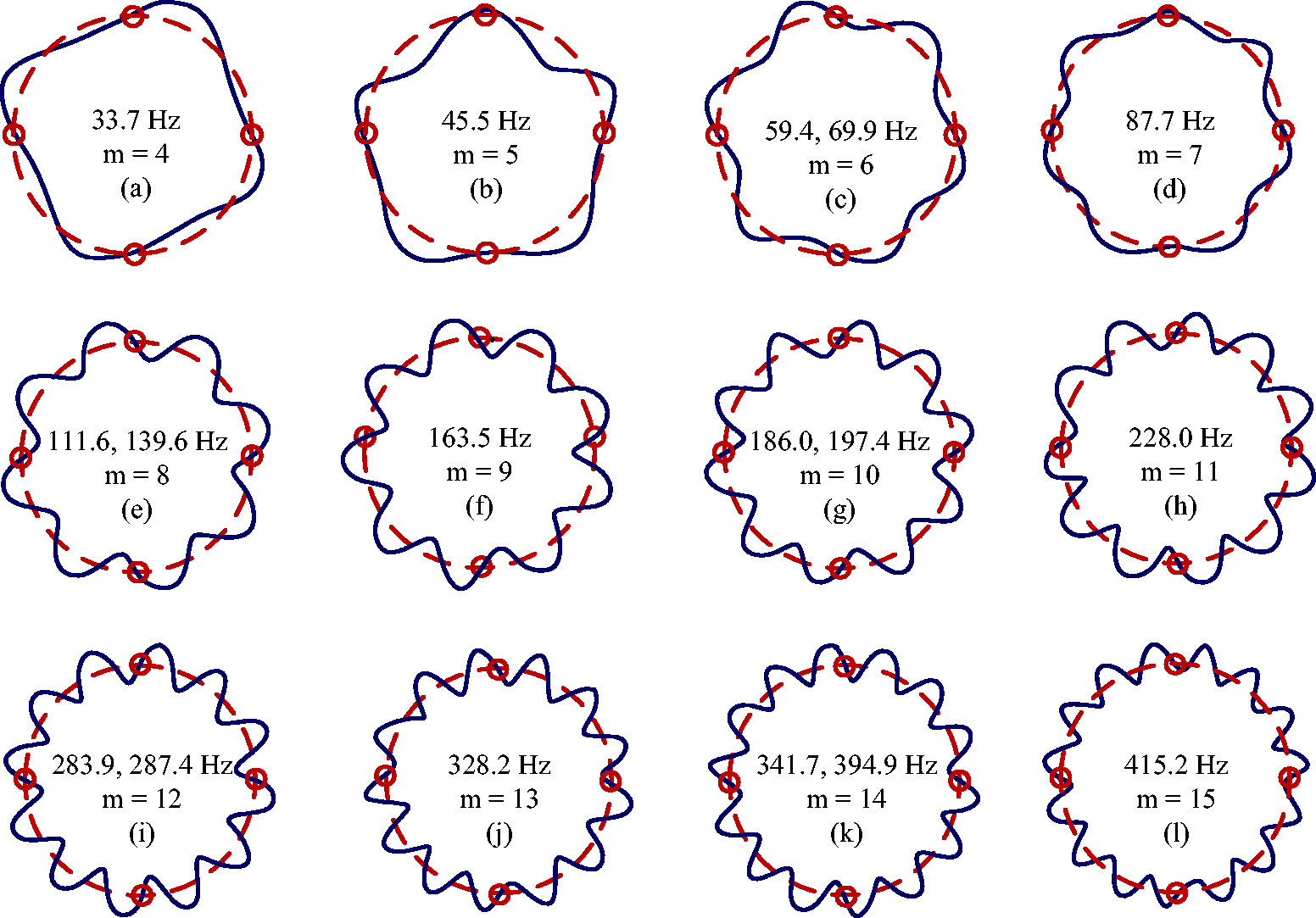
Modal shapes of the ring gear in the case of bolt connections, where m denotes the wave number.
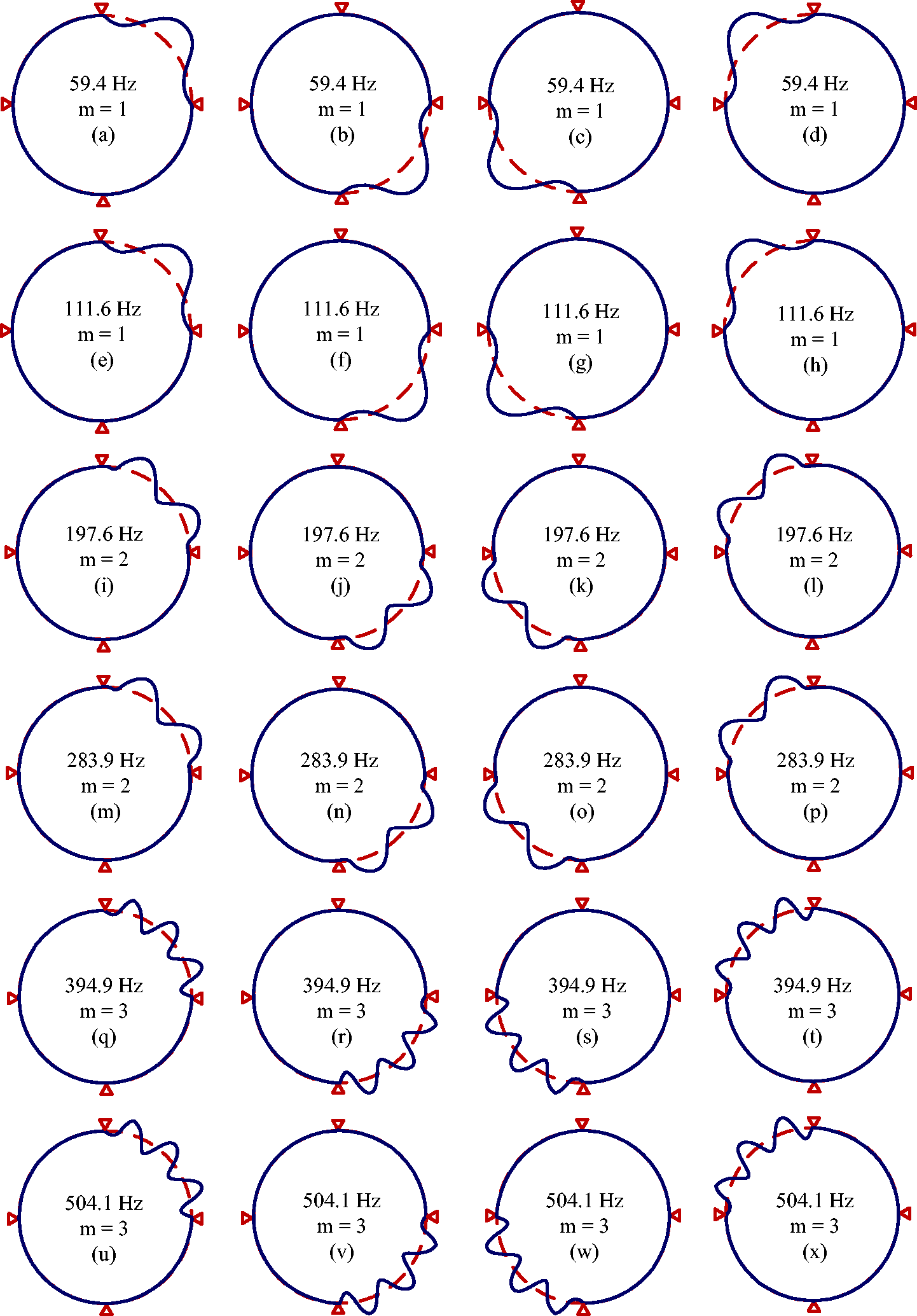
Modal shapes of the ring gear in the case of fixed connections, where m denotes the wave number.
Fixed connection
Analysis results of the inherent characteristics of the spur ring gear in the case of fixed connections are shown in Figure 8. When four fixed connections are used, all DOFs at connection point i are constrained. Because the fixed connection introduces a constraint boundary, the ring gear model has 276 DOFs (96 × 3 – 3 × 4 = 276), and its natural frequency range spans 59–25,411 Hz. In this example, the ring gear is fixed by four fixed connections, and the ring gear is divided into four parts that are relatively independent and structurally symmetrical. Thus, the vibration modes of the ring gear in the case of fixed connections include only local flexural deflection modes, namely, flexural deflection occurs at each independent component of the ring gear. All of the modes have two sets of eigenvalues, each with four identical natural frequencies (multiplicity of four).
Conclusions
Because of limitations in design requirements, manufacturing, and assembly, the connection between a ring gear and the outer frame often varies for different products. A vibration analysis model for flexible spur ring gears is established using 2D Timoshenko beams; this model can consider the influences of tension, transverse shear, and bending deformation. Based on this model, the vibration characteristics of a ring gear subjected to various connection types are investigated, and the vibration modes are classified and defined. The main results are summarized as follows:
The vibration characteristics of the ring gear vary for the different connection types. Thus, when vibration analyses and design are performed for a ring gear, the boundary condition of the analysis model must closely match that of the actual connection type. When the ring gear is the output component, its vibration modes are classified as rigid body, flexural deflection, and extensible deflection modes. In the case of bond connections, the vibration modes of the ring gear are classified as flexural and extensible deflection modes. Furthermore, in the case of bolt connections, the vibration modes of the ring gear include only flexural deflection modes, while in the case of fixed connections, the vibration modes are local flexural deflection modes. For the flexural deflection modes, the ring gear exhibits flexural deflection as a whole (no radial extension). For the extensible deflection modes, the position of the ring gear exhibits only radial motion (no tangential motion). For the local flexural deflection modes, when the ring gear and the outer frame are connected using fixed-type connections, the ring gear is segmented at specific connection positions, and each independent component of the ring gear undergoes flexural deflection.
Using this study as a reference, scholars can further evaluate various aspects of a spur planetary gear set with a flexible ring gear for different connection types, including studies on dynamic modeling, inherent characteristics, dynamic response, dynamic stability, and vibration and noise suppression.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant Nos. U1764259 and 51705042).