
Abstract
This paper uses the Barycentric Lagrange interpolation method to explore the free vibration of a plate with the regular and irregular domain using the Chebyshev function, allowing us to consider multiple dimensions. From our results, it can be shown that the Barycentric Lagrange interpolation method can solve three-dimensional problems. In the analysis, we can see that the Barycentric Lagrange interpolation method can solve the dynamic motion of the plate with regular domain, and the error of the simulation can be reduced to 0.15%. The effect of the geometric node number on the simulated error of the natural frequency of the plate is very profound. The Barycentric Lagrange interpolation method and the extrapolation difference method can solve the natural frequency of the plate with irregular domain. The error of the simulation on the natural frequency can be reduced to 1.084%. This allows us to understand the vibration of the plate with the regular and irregular domain under various boundary conditions quickly.
Introduction
Numerical analysis is a very important tool to apply prediction to engineering problems. Many numerical methods are used to analyze various problems. Well-established tools include the finite element method and the finite volume method, available in business software. The finite volume method is used to solve fluid problems mainly, while the finite element method is mostly used to solve solid problems. Thus, the two methods must be chosen based on the state of the element. The property and shape of the element can affect the solution and convergence of the problem. In recent years, many researchers have started using meshless methods to solve engineering problems. The advantage of meshless methods is that they do not consider the state, just the node position and numbers.
There are many styles of meshless methods, though they share a common property of a need for a trial function and weight function. From the literature, the core of the meshless method is the trial function. Therefore, the trial function defines various meshless methods. There are the smooth particle method, moving least square, reproducing kernel particle method, point interpolation method, the partition of unity method, and the barycentric interpolation collocation method. The advantage of meshless methods is that we need not concern ourselves with the state of the elements, only node position. Therefore, we choose to use a meshless method to consider the vibrations of a plate. From the Chen and Wang 1 research result, we see that the high-accuracy Barycentric Lagrange interpolation can solve the biharmonic equation. This is used to solve the problem according to Ben et al. 2 The solution error of the problem can be reduced to 10−8. Thus, the numerical solution is very close to the solution by analysis. Lin et al. 3 use this particular solution method to solve the problem of plate vibration. It solved the eigenvalue problem of the plate well enough, but did not solve the two-dimensional boundary value problem or the initial value problem.
The barycentric interpolation collocation method is based on the collocation point type, including the interpolation function. The interpolation method is a very powerful and widely applicable method. From the referenced article, 4 we see that this includes the Lagrange interpolation method, the piecewise linear interpolation method, the spline interpolation method, and the rational function interpolation method. However, the equidistance nodes of geometric space can cause an unstable solution. In recent years, many researchers have used alternative methods to consider this problem, such as utilizing the Chebyshev function to construct the node position. This is not the equidistance node of geometric space, so it can improve the stability of our solution. Therefore, this paper uses the Chebyshev function to determine node position. From the literature, we know that the Chebyshev function used in conjunction with a meshless method can solve many classic engineering problems. This paper uses Lagrange interpolation in conjunction with the Chebyshev function to solve the two-dimensional boundary value problem and the initial value problem.
Then, the boundary value problem in irregular domain is very popular. The Chebyshev polynomials method and the base on the polynomials functions method have been applied to solve the boundary value problem in the irregular domain. Kong and Wu 5 used the Chebyshev tau meshless method (CTMM) to solve boundary value problems that included curved boundaries. Based on their analysis, the CTMM is effective for solved Poisson-type problems in irregular domains.
Then, Shao and Wu 6 combined the Fourier spectral method and the differential quadrature method in barycentric form to set up a numerical method to get the solution of the problems of thin plates resting on Winkler foundations with irregular domains. Shao et al. 7 used the Chebyshev tau meshless method based on integration–differentiation (CTMMID) for numerically solving bi-harmonic-type equations in irregular domains with complex boundary conditions. Then, Shao and Wu 8 use the Chebyshev tau meshless method (CTMM), which was based on the highest derivative, that solved the fourth-order equations in irregularly shaped domains with complex boundary conditions. In 2015, Shao and Wu 9 combined the CTMMID with the domain decomposition method and applied it to solve the fourth-order problem on irregular domains. This circumvented the ill-conditioning problem.
According to the aforementioned studies, the meshless method can be used to get the approximate solution of the boundary value problem. The Chebyshev polynomial method can be applied to solve the approximate solution of plate deformation and can address the complex boundary condition, the regular domain and irregular domain, and high-derivative equations. The initial value problem with the regular domain and irregular domain by using the Chebyshev polynomial method cannot be found out in any literature. Therefore, this paper uses the meshless collocation method with barycentric rational interpolation to solve the vibration of a plate with the regular and irregular domain. The irregular domain can be applied to any shape. Then, this can solve the vibration problem of the plate with an irregular domain.
Theory
We will use the Lagrange interpolation method to solve the vibration of the plate. When we consider the one-dimensional problem with n + 1 nodes and the polynomial interpolation function, the solution is the polynomial function



Considering the weight Lagrange interpolation, the weight function is

Supposing the constant function is 1, whose interpolate is, of course, itself, we get
This gives us the barycentric formula for p
According to Chen and Wang,
1
these equidistant nodes are used to construct geometric space. However, Runge’s phenomenon can occur, causing an unstable solution. In order to account for the instability, we can choose the Chebyshev function to construct the node position. This will give us a stable solution. The first Chebyshev function is


The second Chebyshev function is


The Chebyshev node is applied on the [–1,1] domain. Therefore, all these sets of Chebyshev points on the interval [−1,1] are linearly transformed to [a, b]. The variable function is y = x(b–a)/2+(b + a)/2 on the interval [–1,1].
Suppose a function u(x), represented by a polynomial interpolation in Lagrange form

Then the m derivatives of u(x) are

Suppose

On the
As

As for the case i = j,
By using the collection method, we get the m-order differential function as
The two-dimensional boundary value problem
This considers the rectangular area [a,b]×[c,d]. The x line interval is [a,b]. The y line interval is [c,d]. The interval [a,b] is divided into n segments. The interval [c,d] is divided into r segments. This gives the two-dimensional function

The m-order partial derivative

The s-order partial derivative

Therefore, this can be represented as

The two-dimensional boundary value and one initial value problem
This considers the rectangular area [a,b] × [c,d] and the time domain [e,f]. The time domain [e,f] is divided into h segments. The solution of the two-dimensional boundary value and one initial value problem is shown as

Applying the same theorem, the m, s, and v partial derivatives with respect to x, y, and t, the equation is shown as

Therefore, this equation is




The vibration problem of the plate
Considering the square plate, the geometry of the plate is [a,b]x[c,d]. From the governing equation of the plate, the dynamic function of the plate can be shown as
10

Therefore, the governing equation of the plate is shown as

Substituting the Barycentric Lagrange interpolation function, the dynamic function of the plate can be determined as

We can rewrite the function as

The matrix form is depicted as


Boundary condition of the irregular domain
Clamp-supported condition
The boundary curve line of the irregular domain is discretized by taking m0 nodes along the curved line

To ascertain the normal direction, the variable function of the curve line on the boundary of the irregular domain can be considered. If the boundary function is

By combining the governing equation (28) and the boundary equation (31), this system matrix can be obtained as

This matrix equation indicates that the node number on the calculative domain is nx × ny and the boundary node number is m0. The
Numerical results
This considers a square plate of 1m×1m. A lateral force is applied to the plate of magnitude 1. In order to understand the deformation, the lateral force is a uniform force = 1. Every side of the plate is divided into 16 segments. Chebyshev points of the first kind are applied to construct the position of the node points, considering simple support on four sides of the plate. The analysis result can be shown in Figure 1. From analysis, this can give a maximum deformation of the plate of –0.0040625. The maximum deformation of Timoshenko and Woinowsky-Krieger 10 is –0.00416. The error between maximum deformation of the paper and Timoshenko and Woinowsky-Krieger 10 is about 2.34%.
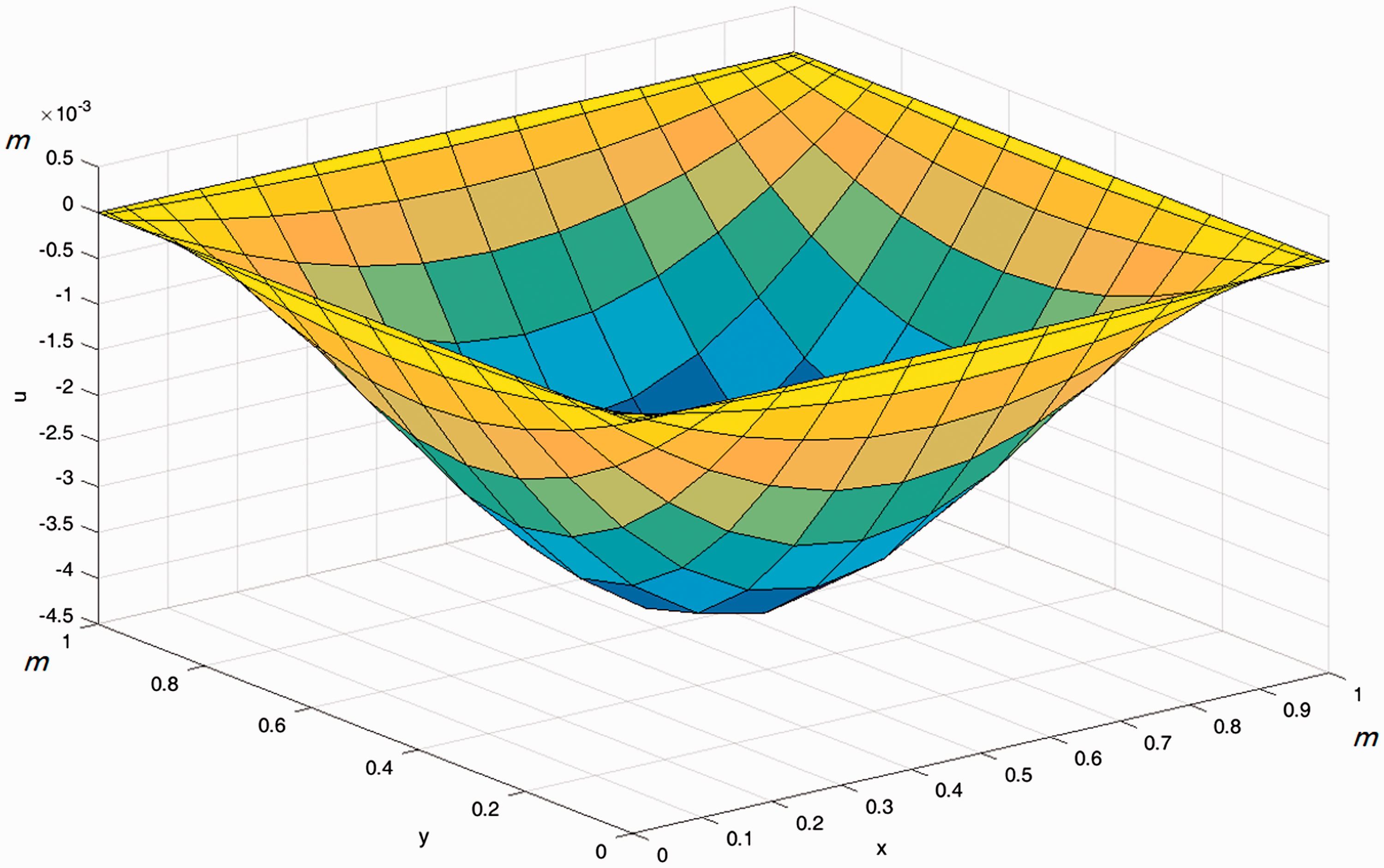
Deformation of plate with simple support under a lateral force = 1.
If the four sides of the plate are supported with clamps and the lateral force is 1, the maximum deformation of the plate under the same node numbers is –0.00125956. The maximum deformation of Timoshenko and Woinowsky-Krieger 10 is –0.00126. The error between maximum deformation of the paper and Timoshenko and Woinowsky-Krieger 10 is about 0.03492%. The deformation of the plate is shown in Figure 2.
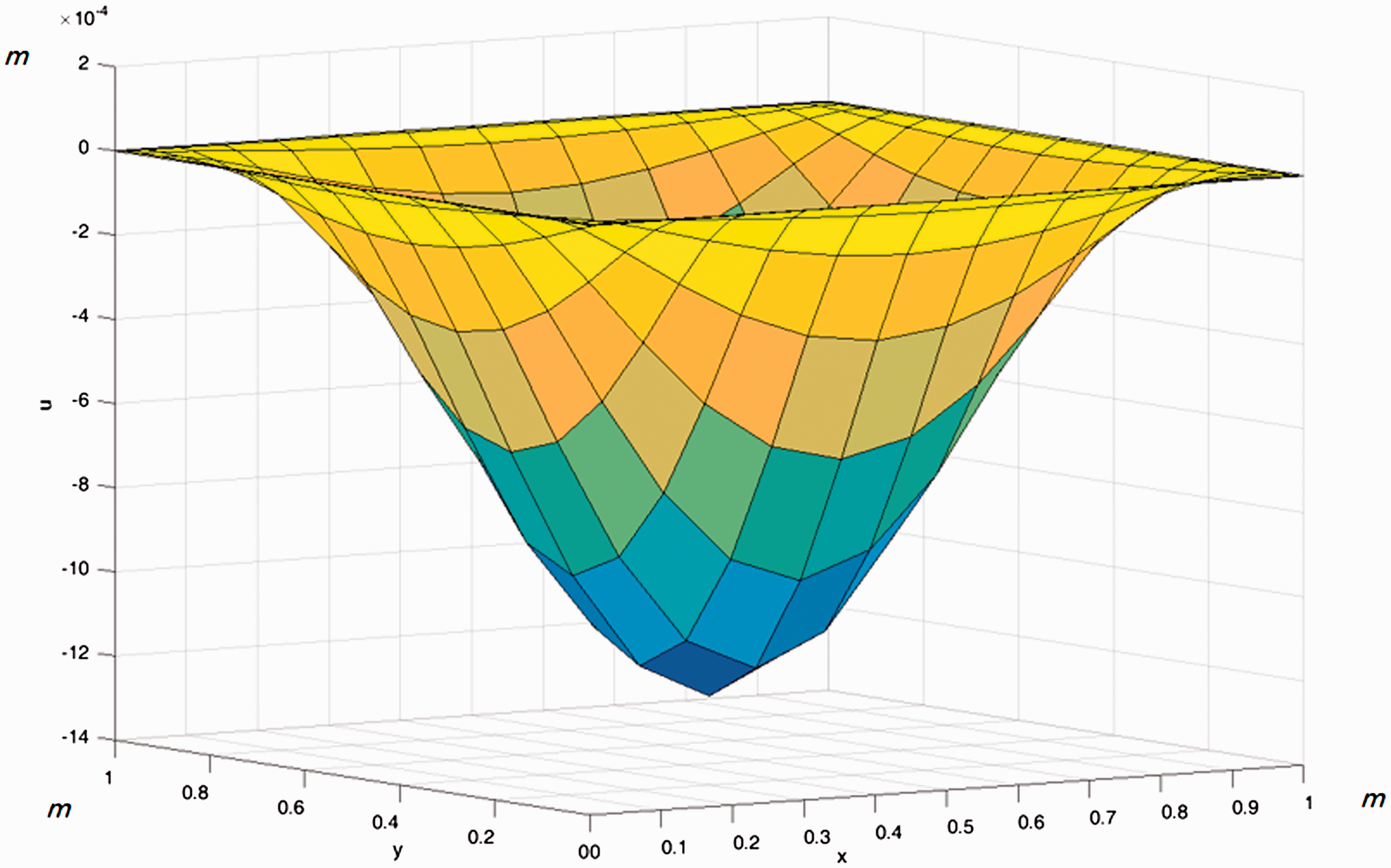
Deformation of plate with clamped support under a lateral force = 1.
Free vibration motion of the plate with the regular domain
In order to understand the free vibration of the plate, the initial deformation of the plate is calculated using a lateral uniform force = 1. When the lateral uniform force disappears, the motion of the plate creates a natural vibration. Therefore, the natural frequency of the plate under the variable condition can be determined. We must consider two conditions: simple support and clamped support.
Simple support condition
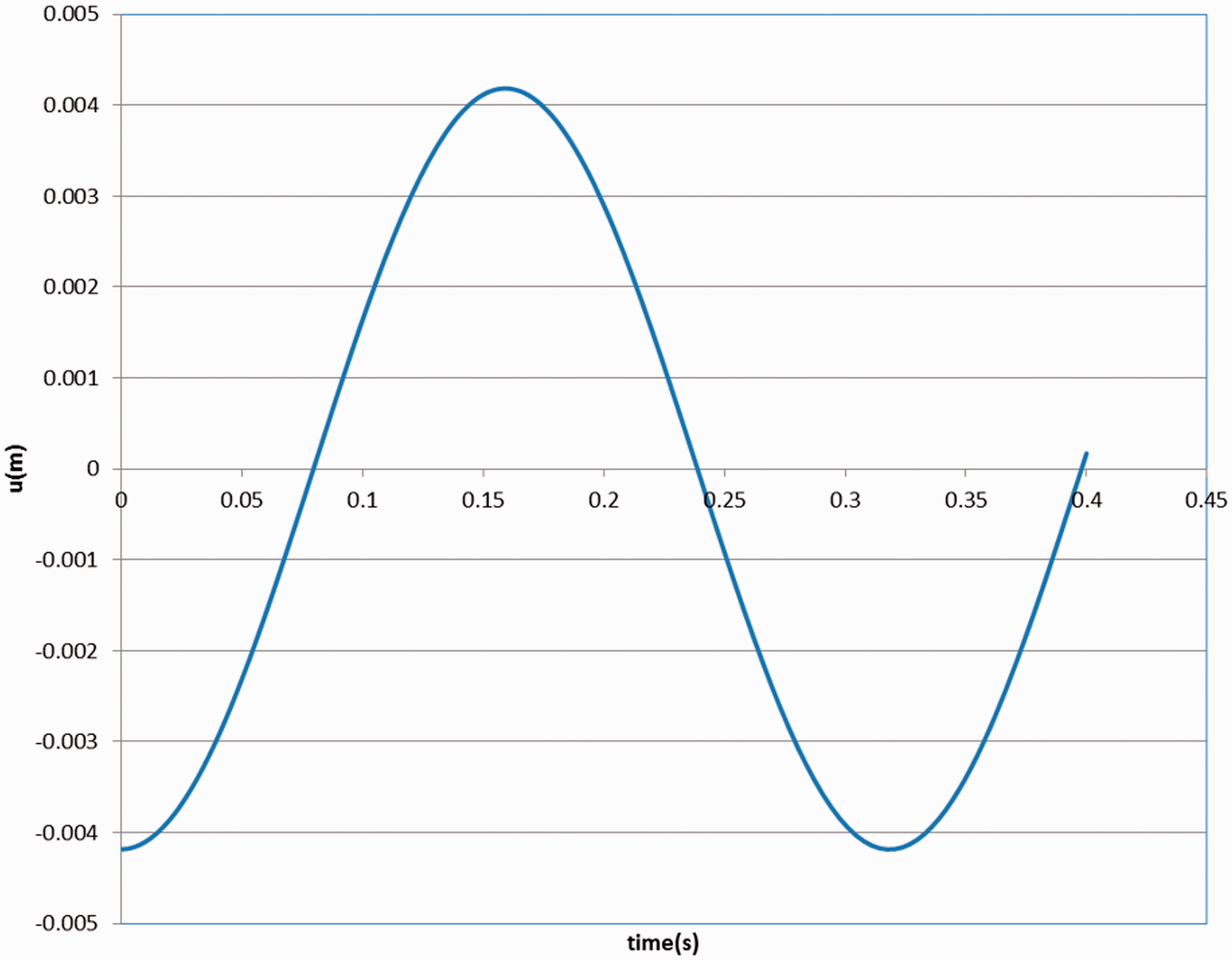
We will use a situation where every side of the plate is divided into eight segments, over a time interval of 0 to 0.4 s. Chebyshev points of the first kind are applied to construct a time node series with 40 time nodes. The large deformation of the plate is recorded, and the motion of the center point of the plate is shown in Figure 3. From Figure 3, we get a first natural frequency of the plate, under simple support conditions, of 19.9406. The first natural frequency of Timoshenko and Woinowsky-Krieger 10 is 19.74. The error compared with Timoshenko and Woinowsky-Krieger 10 is approximately 1.01%.
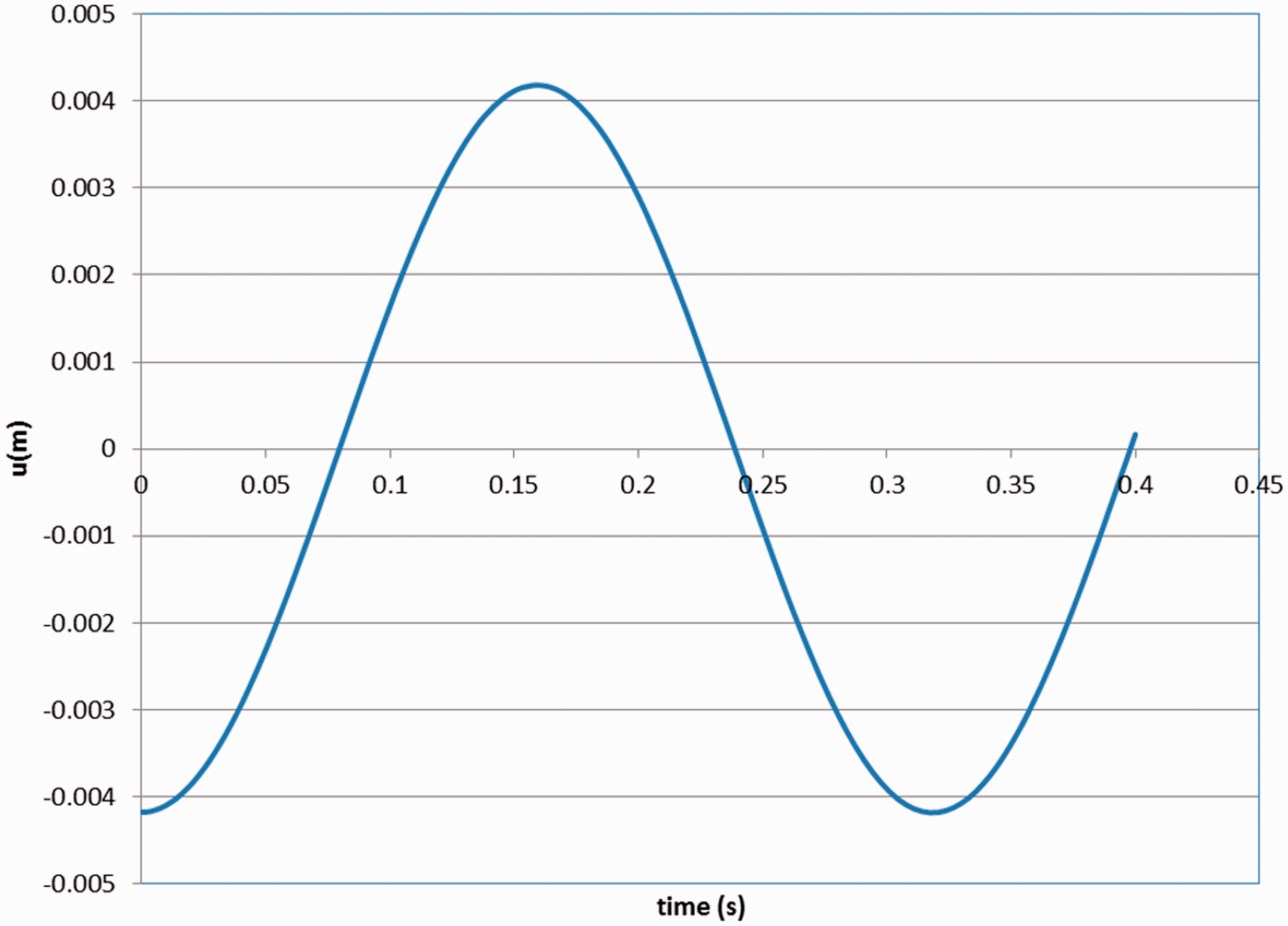
Motion of the center of the plate over 40 time nodes.
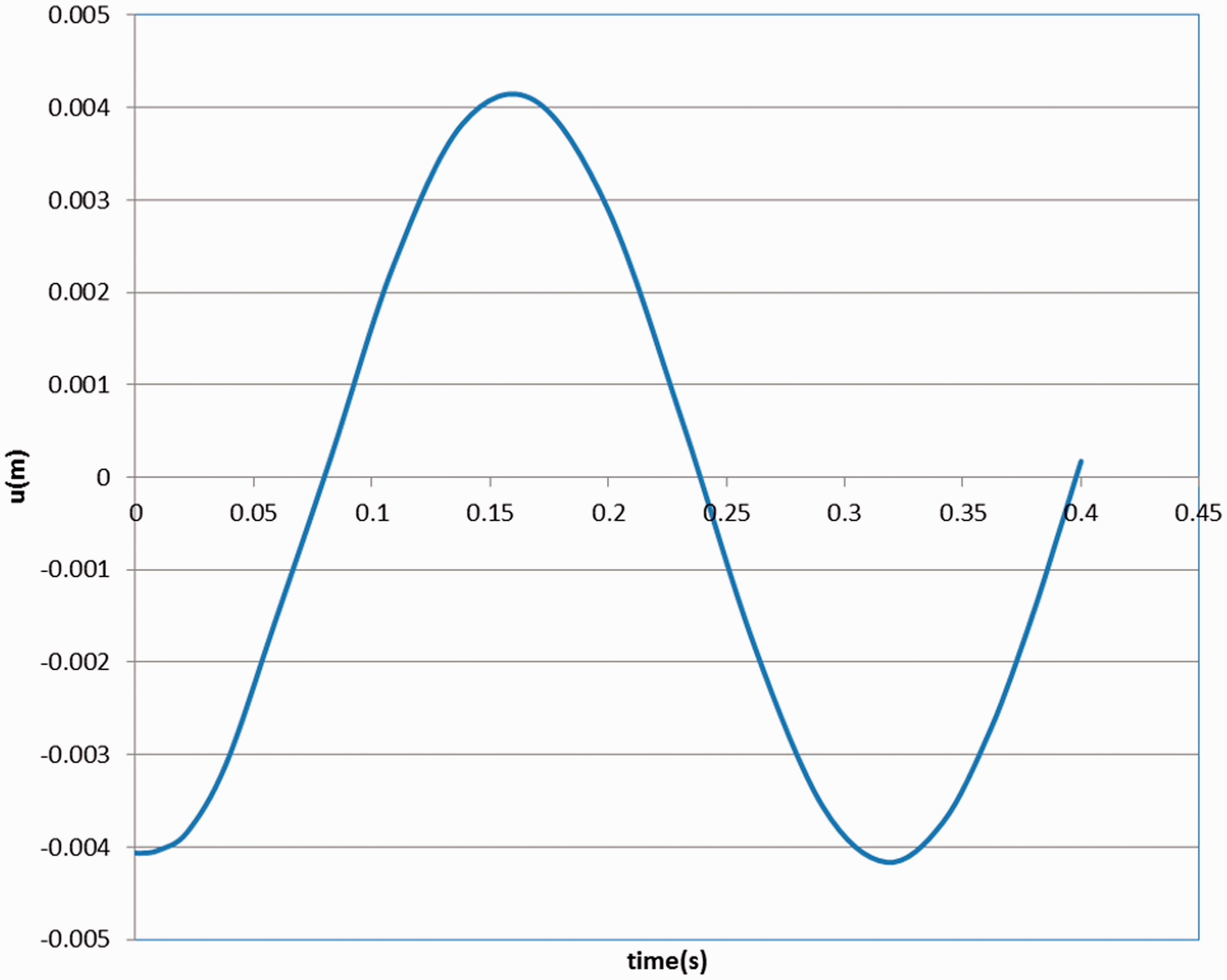
In order to understand the effect of the time domain node number on the solution accuracy, increase the number of time nodes to 80. The time interval is still 0 to 0.4 s, and every side of the plate is still divided into eight segments. The motion of the center point of the plate is shown in Figure 4. From Figure 4, we get a first natural frequency of the plate, under simple support conditions, of 19.55207. The first natural frequency of Timoshenko and Woinowsky-Krieger 10 is 19.74. The error compared with Timoshenko and Woinowsky-Krieger 10 is approximately 0.952%.
Motion of the center of the plate over 80 time nodes.
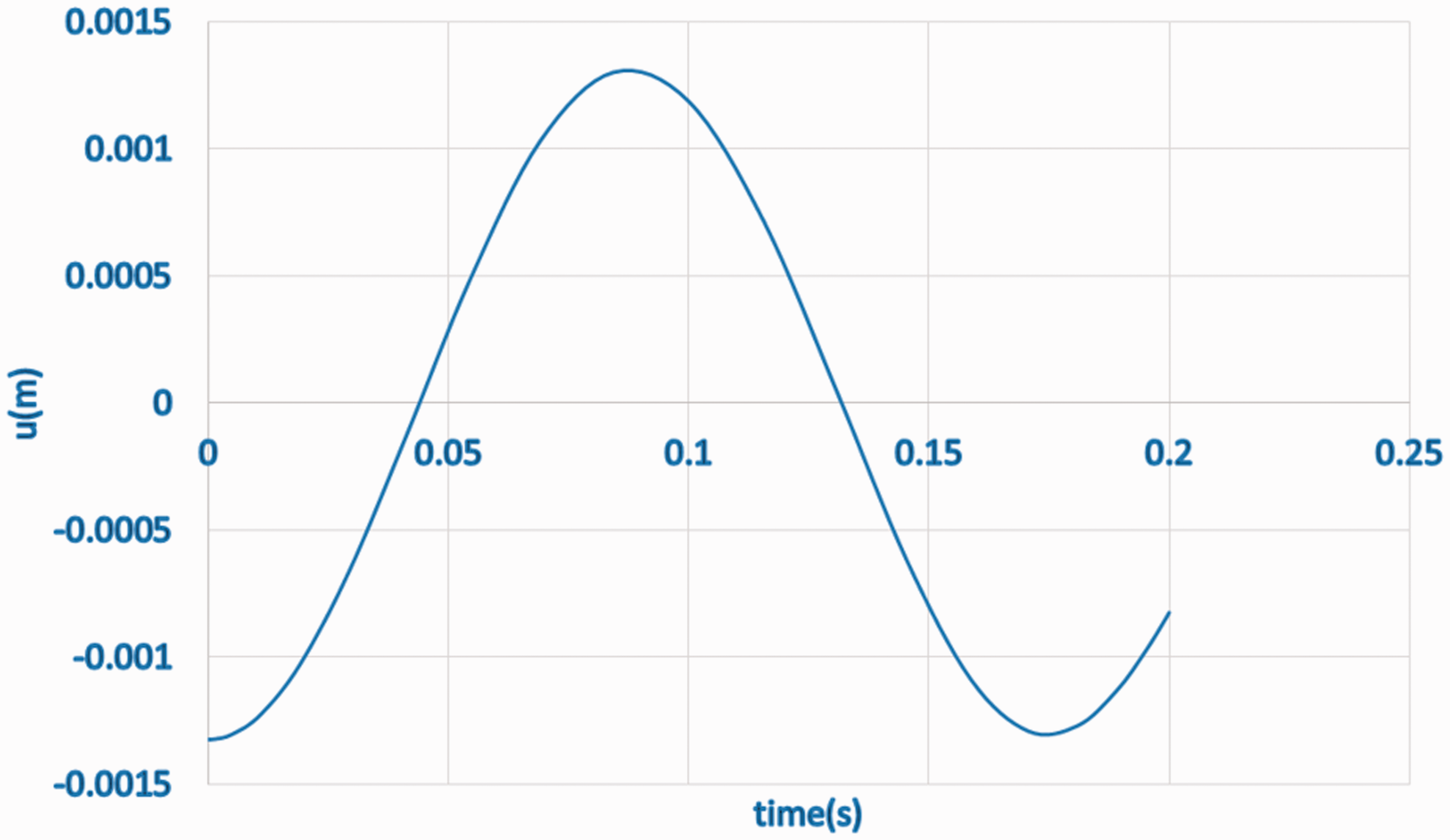
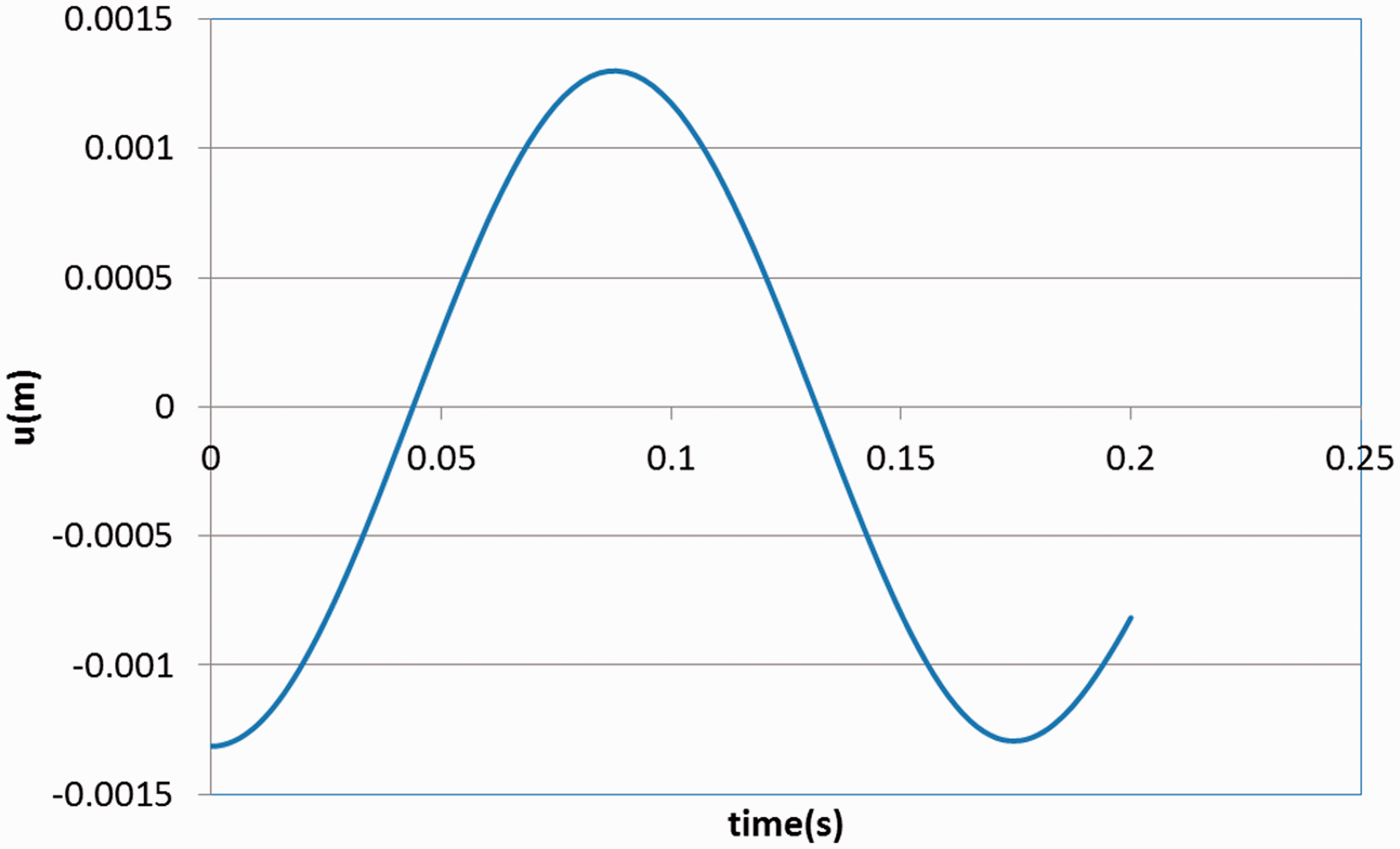
In order to understand the effect of the geometric node number on the solution accuracy, increase the number of dividing segments to 16. This causes a large node number, so decrease the number of time nodes to 20, still over the interval of 0 to 0.4 s. The motion of the center of the plate is shown in Figure 5. Analyzing this result, we get a first natural frequency of the plate of 19.786. The error compared with Timoshenko and Woinowsky-Krieger 10 is about 0.23%. Thus, we can see that the effect of increasing the geometric node number increases the accuracy of our natural frequency calculations.
Motion of the center of the plate over 20 time and 256 geometric nodes.
In order to understand the effects of the geometric node number and the time domain node number on solution accuracy, now calculate 16 segments and a time domain reduced to 0 to 0.2 s with 20 segments. The natural frequency of the plate, simply supported, is 19.786. When we reduce the time domain to 0 to 0.1 s with 20 segments, the natural frequency of the plate, simply supported, is still 19.786. From this result, we can know that great geometric and time node numbers can achieve a highly accurate solution.
Clamp support condition
We will use a situation where every side of the plate is fixed with four clamp support and divided into eight segments, over a time interval of 0 to 0.2 s with 20 nodes. Chebyshev points of the first kind are applied to construct the time node series and geometric node series. The large deformation of the plate is recorded, and the motion of the center point of the plate is shown in Figure 6. From Figure 6, we get a first natural frequency of the plate, under clamp support conditions, of 33.2267. The first natural frequency of Leissa 11 is 35.99. The error compared with Leissa 11 is approximately 7.68%.
Motion of the center of the clamped plate, 64 geometric and 20 time nodes.
In order to get an accurate solution, consider a time interval of 0 to 0.2 s with 40 segments, still with the plate divided into eight segments. Chebyshev points of the first kind are applied to construct the time node series and geometric node series. The motion of the center point of the plate is shown in Figure 7. From Figure 7, we get a first natural frequency of the plate, under clamp support conditions, of 35.6918. The error compared with Leissa 11 is approximately 0.83%. Thus, our accuracy is greatly improved.
Motion of the center of the clamped plate, 64 geometric and 40 time nodes.
If we increase the number of segments of the time domain to 60, we get a first natural frequency of the plate of 36.04511, shown in Figure 8. The error compared with Leissa 11 is now approximately 0.15%.
Motion of the center of the clamped plate, 64 geometric and 60 time nodes.
Free vibration motion of the plate with an irregular domain
Clamp-supported circular plate
This example considers a circular plate with a clamp support. The domain of the circular plate is
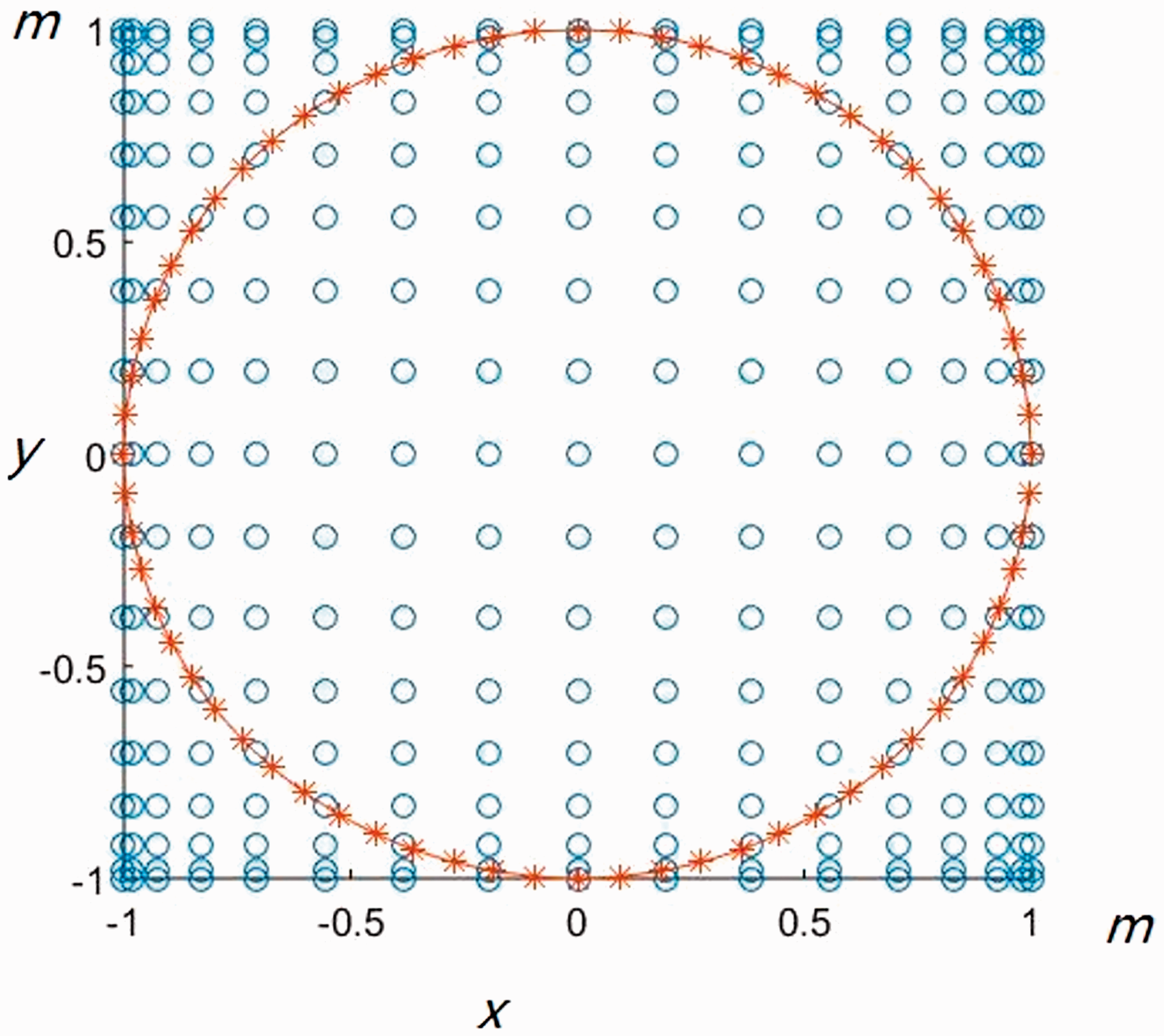
Regular domain embedding circular boundary domain.
In order to get the initial shape of the plate in the natural vibration motion, the circular plate with clamp support and a uniform lateral load of f = 1 are considered. As this condition and load are applied, the center displacement of the circular plate is
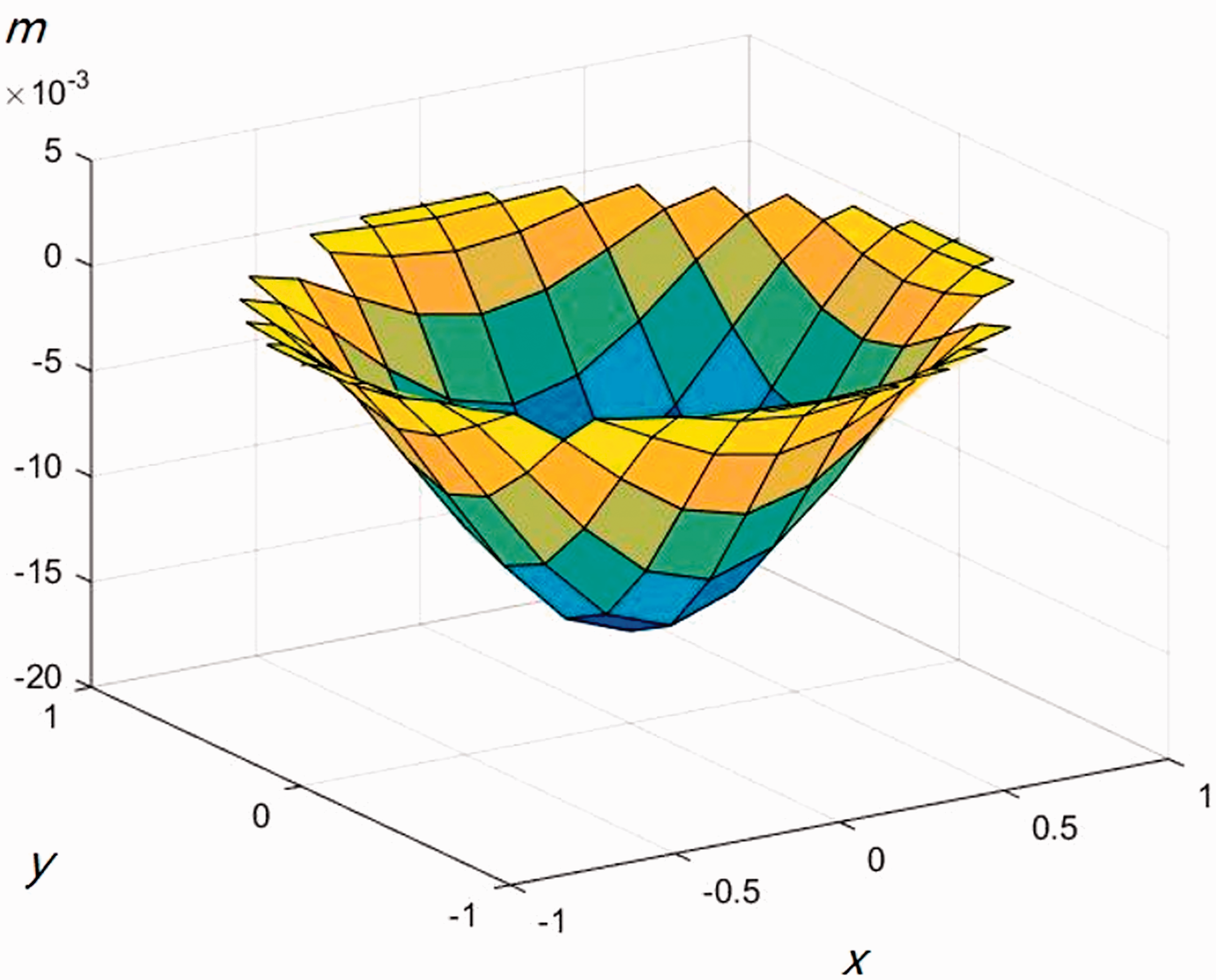
Displacement of the circular plate with clamp support and lateral load f = 1 (regular domain 16 × 16).
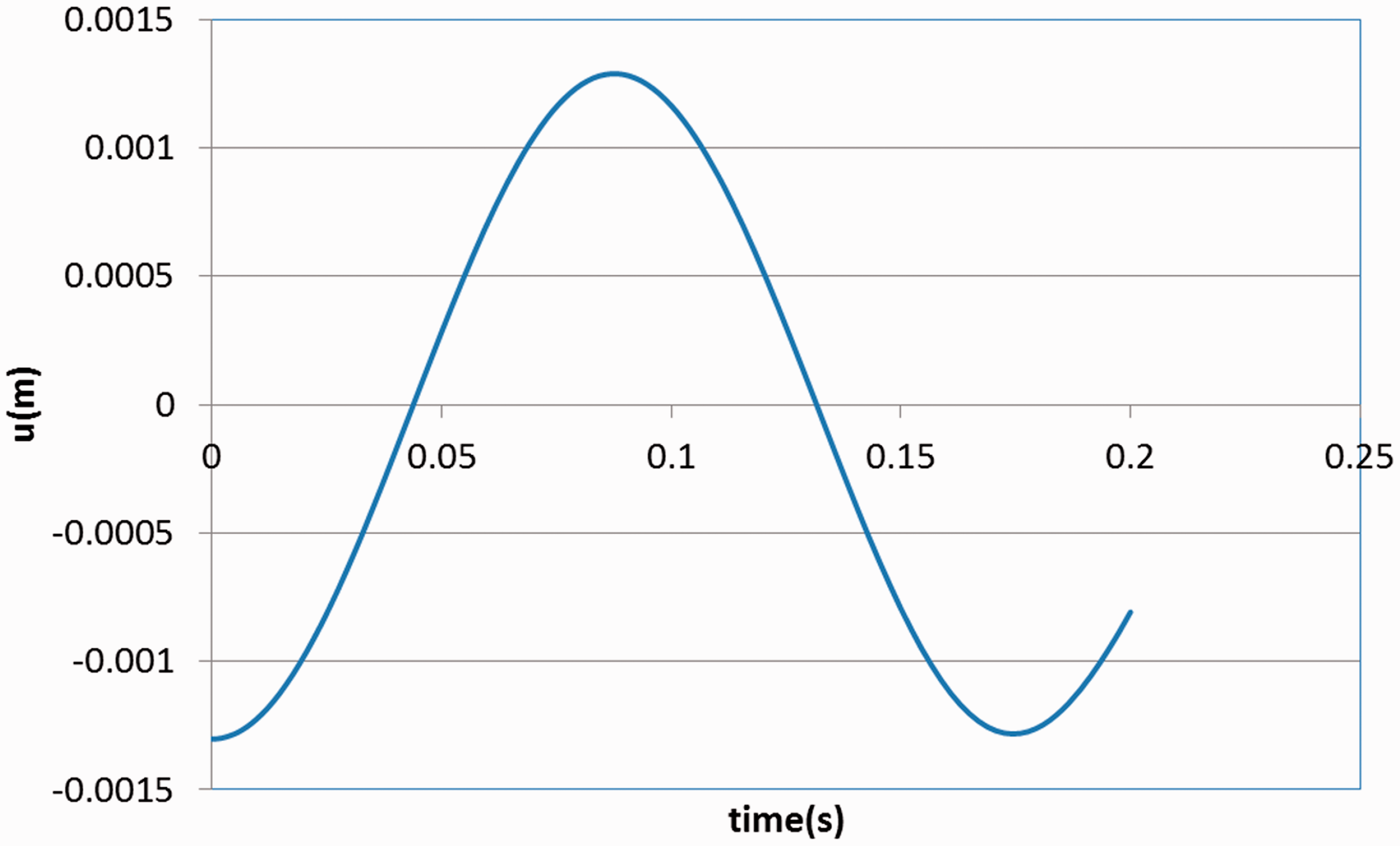
We will use a situation over a time interval of 0 to 0.8 s. Chebyshev points of the first kind are applied to construct a time node series with 30 time nodes. The large deformation of the plate is recorded, and the motion of the center point of the circular plate is shown in Figure 11. From Figure 11, we get natural period of vibration and a first natural frequency of the circular plate, under clamped-supported conditions, as 0.63367 s and 9.915538, respectively. The first natural frequency of the circular plate, under clamped-supported conditions of Leissa 11 is 10.2158. The error compared with Leissa 11 is approximately 2.9392%.
Motion of the center of the circular plate over 30 time nodes.
From Figure 11, this can be known that the time nodes are discrete. This cannot get the accuracy result in the discrete time domain, directly. But, this can use the extrapolation difference method to get the high-accuracy result. By using the extrapolation difference method, the natural period of vibration and a first natural frequency of the circular plate, under clamped-supported conditions, are 0.62178 s and 10.10505, respectively. The error compared with Leissa 11 is approximately 1.084%.
Clamp-supported elliptical plate
This example considers an elliptical plate with clamp support. The domain of the elliptical plate is
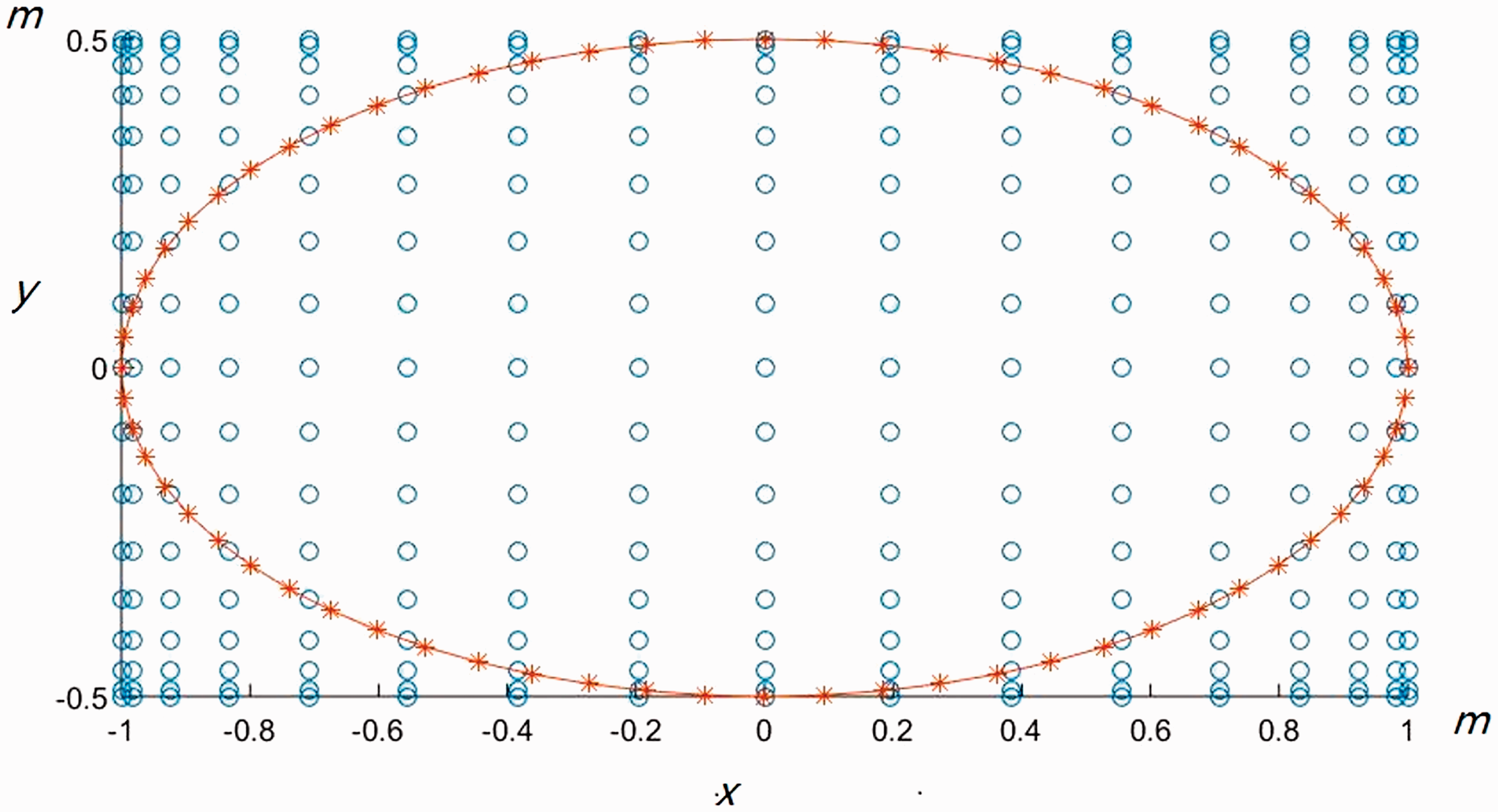
Regular domain embedding elliptical boundary domain.
In order to get the initial shape of the plate in the natural vibration motion, the elliptical plate with clamp support and a uniform lateral load of f = 1 are considered. As this condition and load are applied, they yield a center displacement of the elliptical plate, that is,
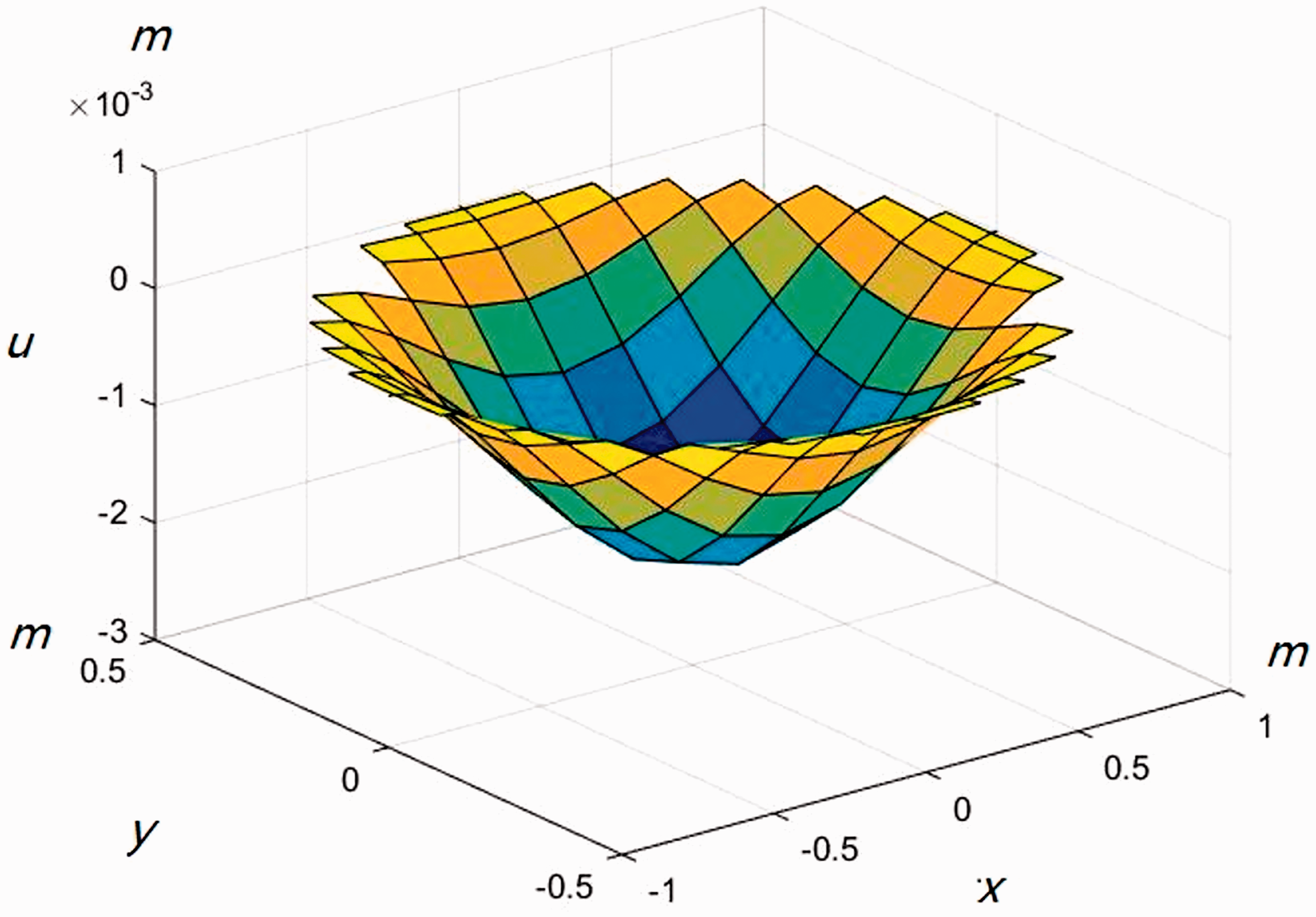
Displacement of the elliptical plate with clamp support and lateral load f = 1 (regular domain 16 × 16).
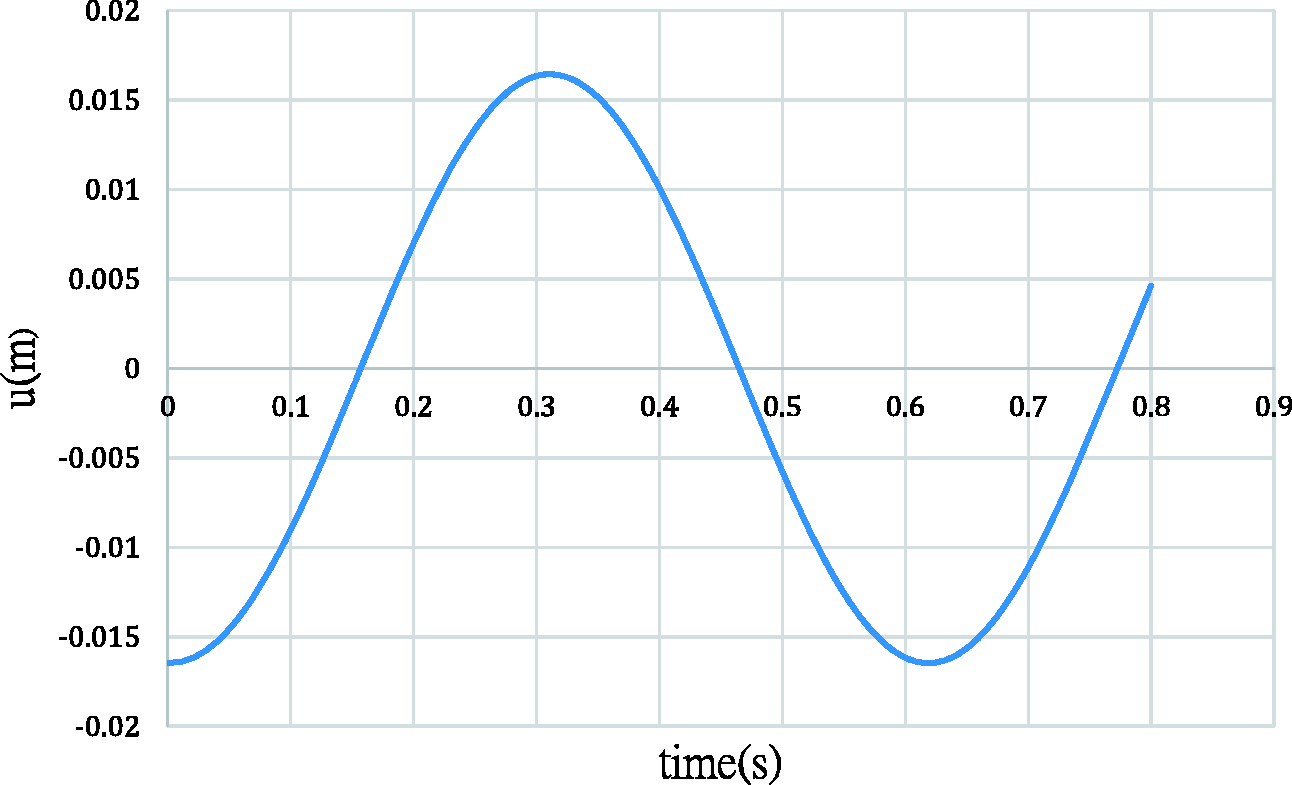
We will use a situation over a time interval of 0 to 0.4 s. Chebyshev points of the first kind are applied to construct a time node series with 50 time nodes. The large deformation of the elliptical plate is recorded, and the motion of the center point of the elliptical plate is shown in Figure 14. From Figure 14, we get natural period of vibration and a first natural frequency of the elliptical plate, under clamped-supported conditions, as 0.23095 s and 27.20587, respectively. The first natural frequency of the elliptical plate, under clamped-supported conditions of Leissa 11 is 27.5. The error compared with Leissa 11 is approximately 1.07%.
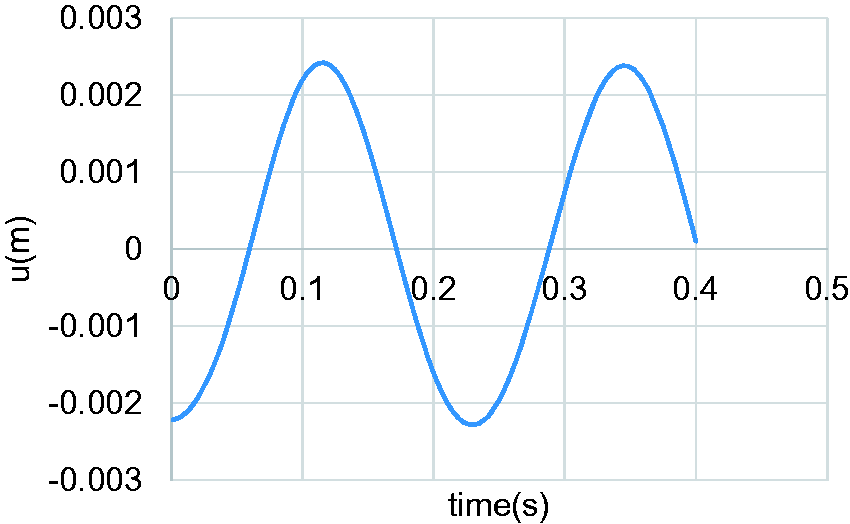
Motion of the center of the elliptical plate with clamp support over 50 time nodes.
Clamp-supported heart-shaped plate
This example considers the heart-shaped plate with clamp support. The domain of the heart-shaped plate is
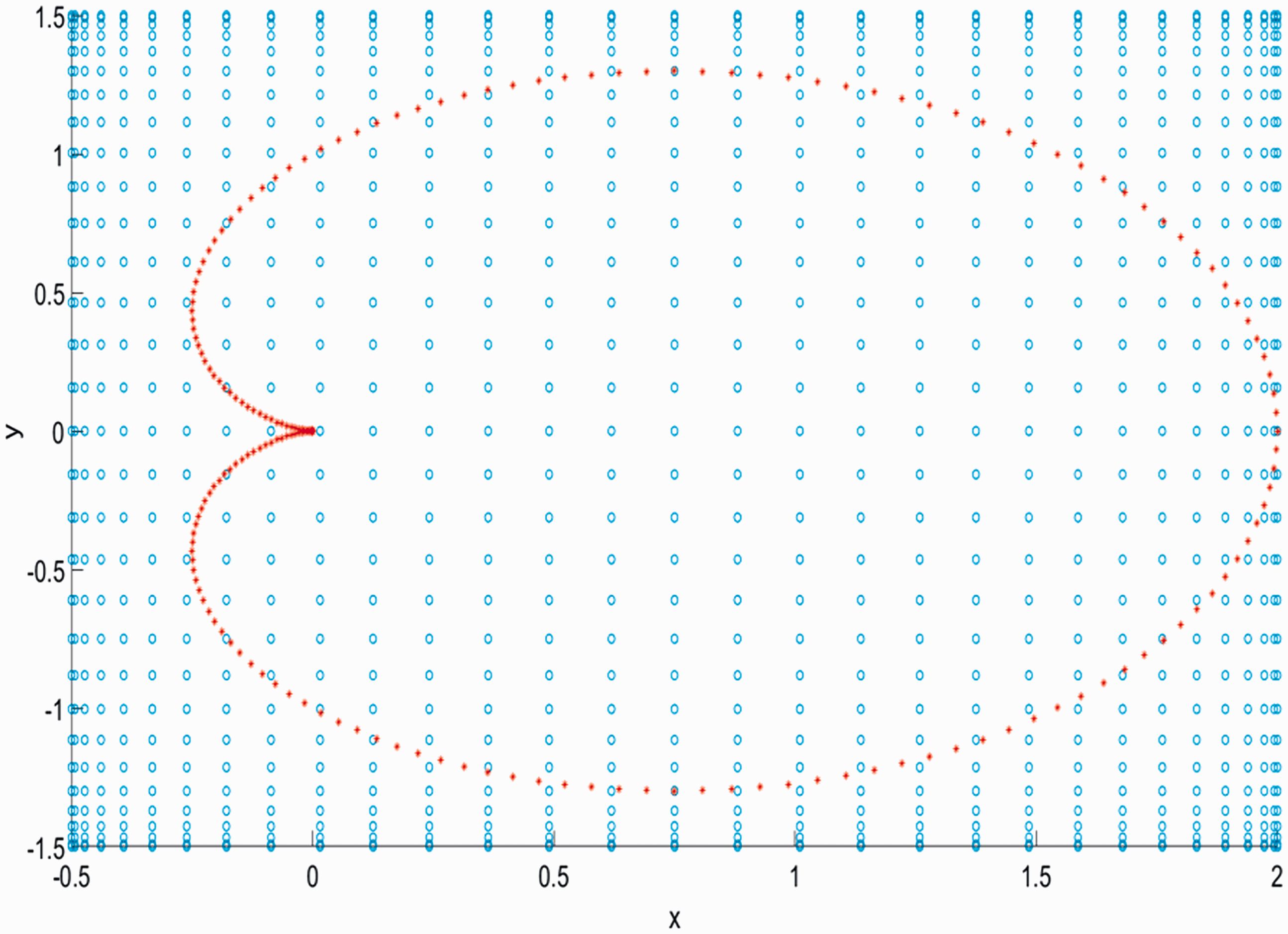
Regular domain embedding elliptical boundary domain.
In order to get the initial shape of the heart-shaped plate in the natural vibration motion, the elliptical plate with clamp support and a uniform lateral load of f = 1 are considered. As this condition and load are applied, they yield a maximum displacement of the heart-shaped plate, that is, –0.030762 by using the ANSYS software. This is shown in Figure 16. Now, consider the regular domain node number 30 × 30 and the boundary node number 124. The center displacement of the heart-shaped plate is –0.031979. The result is very close to the ANSYS result. The initial shape of the plate is shown in Figure 17.
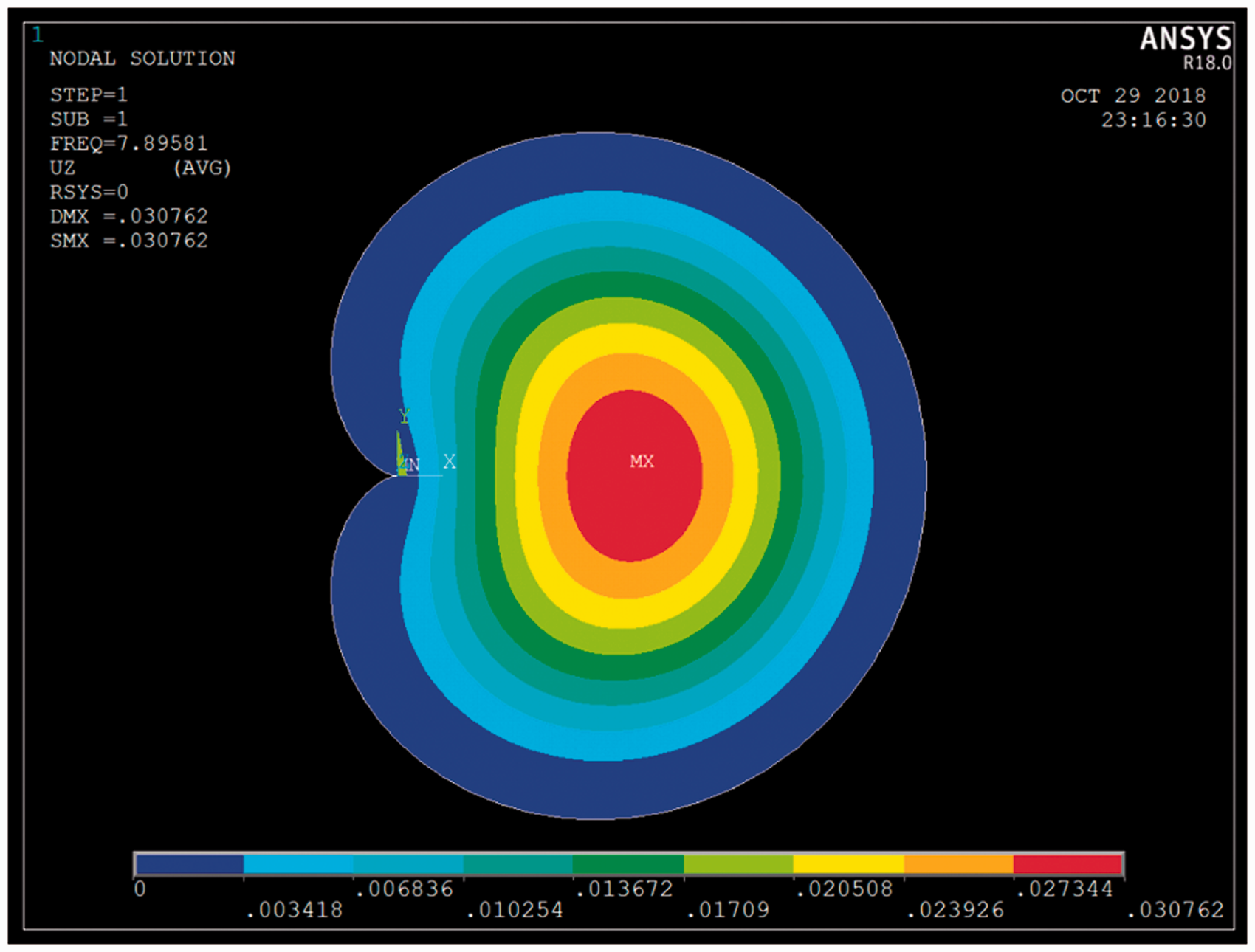
The first natural frequency and mode shape of the heart-shaped plate with the clamp-supported boundary condition in ANSYS software.
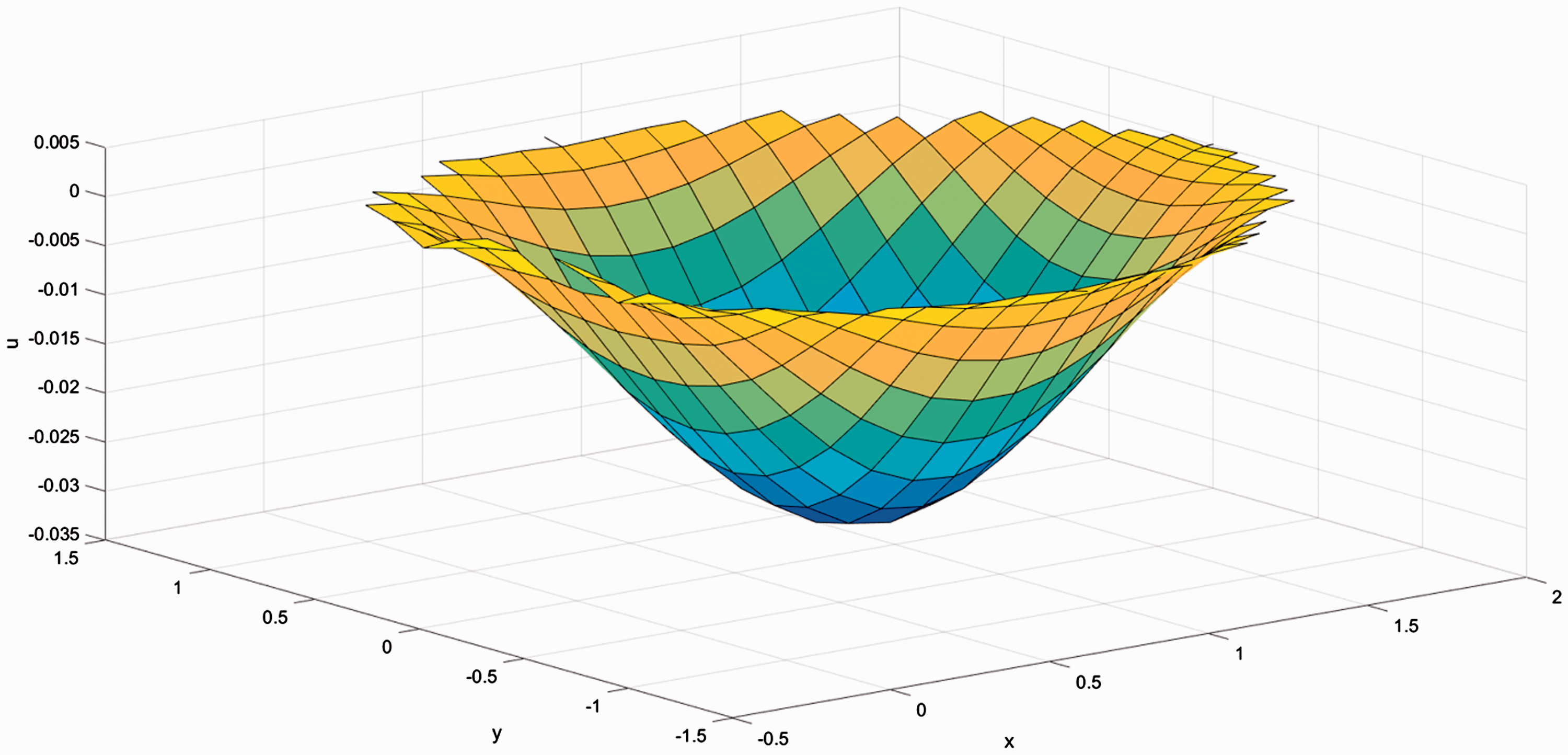
Displacement of the heart-shaped plate with clamp support and lateral load f = 1 (regular domain 30 × 30).
We will use a situation over a time interval of 0 to 0.4 s. Chebyshev points of the first kind are applied to construct a time node series with 10 time nodes. In order to reduce the computing time, the regular domain node number 8 × 8 is considered. We can get the first natural frequency of the heat-shaped plate, under clamped supported conditions, as 5.9997. The first natural frequency of the heat-shaped plate, under clamped-supported conditions, is 7.89581 by using the ANSYS software, as shown in Figure 16. The error compared with the result of the ANSYS is approximately 24.01373%. In order to reduce the analysis error, this also considers a aituation over a time inerval of 0 to 0.4s. The time nodes increases from 10 to 100 time nodes. We get a first natural frequency of the heart-shaped plate, under clamped-supported conditions, from 5.9997 to 7.822044. These errors compared with the result of the ANSYS are from 24.01373% to 0.934245%. This result is shown in Figure 18. From this result, it can be known that the high time node can reduce the error of the first natural frequency by using the Barycentric Lagrange interpolation method.
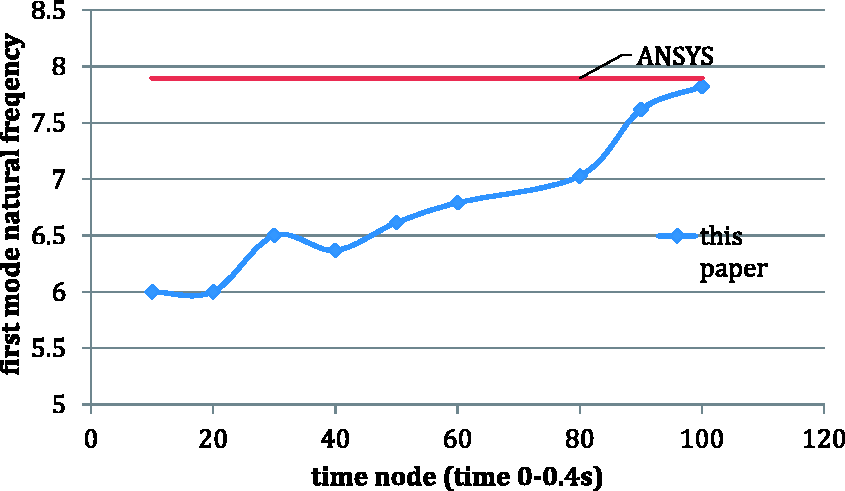
The first natural frequency and mode shape of the heart-shaped plate with the clamp-supported boundary condition under the variable time node (time 0–0.4 s).
Conclusion
This paper uses the Chebyshev function and Barycentric Lagrange interpolation method in conjunction to solve the dynamic motion of a vibrating plate with the regular and irregular domain. In order to get the natural frequency of the plate with the regular and irregular domain, we record the motion of the center point of a plate. From this analysis result, we can give the following conclusions:
This method can accurately calculate the natural frequency of the plate under various boundary conditions. When considering high geometric node numbers, smaller time node numbers cause a greater numerical error. The time node numbers determine an accurate solution of the free vibration of a clamped plate. The embedding boundary curving method can be used to solve the vibration of the plate with an irregular domain. When the Barycentric Lagrange interpolation method and the extrapolation difference method is applied simultaneously, this can increase the accuracy of the solution of the natural frequency of the plate.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.