
Abstract
Low-frequency noise emitted by elevated viaducts in light rail transit lines has considerable adverse effects on inhabitants living nearby. Reliable prediction of the acoustic field radiating from the viaduct using forward numerical models is challenging because the model parameters that influence viaduct vibration are difficult to obtain. To avoid directly quantifying these parameters, such as wheel–rail combined roughness, an inverse method is presented to reconstruct the acoustic field using modal acoustic transfer vectors and the sound pressures at a small number of measurement points. First, a forward numerical method based on the train–track–bridge interaction analysis is performed to predict the structure-borne noise of a concrete box girder viaduct. Then, the calculated sound pressures are treated as virtual measurement results to illustrate the inverse method procedure. Both QR decomposition and singular value decomposition with Tikhonov regularisation are used in the inverse analysis. Third, the proposed inverse method is validated by comparing the sound pressure levels computed using the inverse method with the results simulated using the forward prediction method. Finally, the reliability of the inverse procedure is further validated through field tests of two U-shaped girder viaducts.
Introduction
The overall noise level of a railway bridge system is usually larger than that of the ground track system, due to train-induced bridge vibration. Stiebel et al. 1 showed that the total noise levels of railway steel bridges with directly fastened track, steel bridges with ballasted track and concrete bridges with ballasted track could be 12 dB, 6 dB or 3 dB greater than plain track, respectively. Experimental and numerical results showed that concrete viaducts mainly generated low-frequency noise emissions (20–200 Hz), 2 which were easy to ignore when A-weighted sound pressure level (SPL) was utilised for evaluation. Low-frequency vibration and noise can cause annoyance, physiological disorders and sleep deprivation.3–5 Moreover, low-frequency noise is difficult to control with traditional sound barriers. Thus, an efficient method is needed to study and attenuate low-frequency bridge noise.
A variety of forward prediction methods have been proposed to simulate bridge noise. First, bridge vibration can be obtained from the dynamic analysis of train–track–bridge interaction in the frequency domain6,7 or time domain.2,8 Then, various acoustic models can be applied to simulate sound pressure emitted by the bridge. Lee et al. 9 simulated the sound radiation from a highway bridge using the Kirchhoff–Helmholtz integral. Oostdijk et al. 10 used the concept of radiation ratio and empirical equations to predict the noise level of a steel-concrete railway bridge. Zhang et al. 11 used a hybrid finite element and statistical energy analysis method to simulate the sound pressure emitted from a concrete box girder with a simplified radiation model. A three-dimensional (3D) boundary element method (BEM) can be used to predict sound radiation from complex bridge structures.2,12 The computation time and storage requirements needed for 3D BEM increase rapidly with the increase of the number of elements. To facilitate the acoustic analysis of bridge structures, a two-and-a-half-dimensional (2.5D) BEM-based procedure was developed in our previous work. 13 The 2.5D method can be utilised to compute the solution of a 3D model with an invariant section using a spatial Fourier transform of the related 2D solutions.13–15 However, due to the uncertainty of the model parameters used in forward simulation, predicting the absolute levels of the acoustic field is quite difficult. For instance, the damping and stiffness of the rail fastener and rail pad, and the combined wheel–rail roughness, are difficult to measure directly and accurately during railway operation. For this reason, the predicted results in earlier works6–12 only agreed with the measured results for some field points and specific frequencies, while for other field points and frequencies, the predicted values achieved less precision.
Laboratory or field measurements can be conducted to obtain noise levels. Ngai et al. 16 studied the noise reduction effect of a concrete viaduct by a laboratory experiment. Li et al. 17 conducted a field test to investigate the sound distribution of a concrete railway box girder. However, abundant microphones are needed to record the whole spatial noise distribution. Moreover, it is difficult to conduct parametric analysis using the experimental method.
To overcome such difficulties, an inverse method was proposed that combined the numerical model and measured data.18–23 Generally, the unknown structure surface velocity can be computed by combining the measured SPLs and the associated transfer matrix, which relate the sound pressure at the acoustic field to the structure velocity. 19 Then, the forward numerical model can be used to predict the SPLs in the entire space. Schuhmacher et al. 20 used inverse BEM to reconstruct the noise of a shaken tire and a rolling tire, and the numbers of the associated measured points were 821 and 977, respectively. Kletschkowski et al. 21 used 2992 measured sound pressure data to perform an inverse analysis of an aircraft fuselage (4.2 m long and 5.64 m wide) based on a finite element acoustic model. Herrin et al. 22 performed an inverse analysis to predict the noise radiation of an engine cover (28 × 19 × 4.7 cm) and a generator set (1.1 × 0.8 × 0.9 m), and the measurement points used were 35 and 100, respectively. Djamaa et al. 23 used a scanning laser vibrometer to measure the velocity of a cylinder with a height of 1.75 m and a diameter of 0.8 m; the measured results of 945 points were then used to localise the sound source inside the cylinder. Zhang et al. 24 proposed an inverse direct time domain BEM to reconstruct the transient sound pressure radiating from a simplified car model, and 1155 field points were set in the measurement. Noise reconstruction is an ill-posed inverse problem, and enough measurement points are needed to capture sufficient information for accurate reconstruction of the structure surface velocity. Generally, more measurement points are needed for a structure with a larger surface area. Thus, the inverse method has seldom been applied to reproduce bridge vibration and noise radiation.
Low-frequency noise radiating from the concrete bridge makes a significant contribution to the total noise level in the frequency range below 200 Hz. Thus, only noise radiation from the bridge was considered in this study. 25 In this paper, an inverse BEM based on a modal acoustic transfer vector (MATV) is presented to investigate the spatial distribution of bridge noise, and only a small number of field points are needed to enable accurate reconstruction. First, the sound pressure radiating from a concrete box girder bridge is predicted by combining train–track–bridge interaction analysis and 2.5D BEM. The simulated results of a few field points used in the forward prediction method are then treated as virtual measurement data to perform an inverse analysis. QR decomposition with column pivoting and singular value decomposition (SVD) with Tikhonov regularisation are used in the inverse procedure. Next, the precision of the inverse procedure is validated through a comparison of the noise level calculated using the forward prediction model with the reconstructed results. The robustness of the inverse method is also discussed. Finally, the accuracy of the inverse procedure is further validated through field measurements of two U-shaped girder bridges.
Inverse BEM procedure
Acoustic transfer vector-based method
Train-induced vibration and structure-borne noise radiating from the bridge can be treated as a steady process during the train’s passage, and bridge noise can be calculated in the frequency domain.26,27 An acoustic transfer vector (ATV)-based method can be used to predict bridge noise, as follows
28

The ATVs can be easily obtained using BEM, and the SPLs of the structure can be directly measured. The unknown surface velocities can then be reconstructed through inverse analysis. However, the number of structure surface elements is significantly larger than the number of measurement points. 22 Thus, to permit accurate reconstruction, a large number of field points should be selected 28 for the measurement. The criteria for the number, location and density of measurement points can be found in Martinus et al. 29
MATV-based method
To improve the efficiency of the ATV-based method, an inverse method based on MATVs is presented in this study. MATVs are the transfer functions between the sound pressure at selected field points and modal displacements. The bridge noise can be expressed as
30

The modal coordinate spectra
Generally, the measurement points are less than the unknown modal coordinate spectra; rather, the number of rows of
QR factorisation with column pivoting
QR factorisation with column pivoting is useful when

The problem is referred to as finding a minimum norm solution of the modal coordinate spectra at each frequency. The minimum norm solution of

SVD with Tikhonov regularisation
SVD is another tool commonly used to solve ill-posed problems.

When measurement errors occur in

Finally, the standard Tikhonov regularised solution can be written as

The whole process of the inverse BEM used in this study is shown in Figure 1. Note that the reconstructed sound field should be compared with the measurement to validate the accuracy of the inverse model.
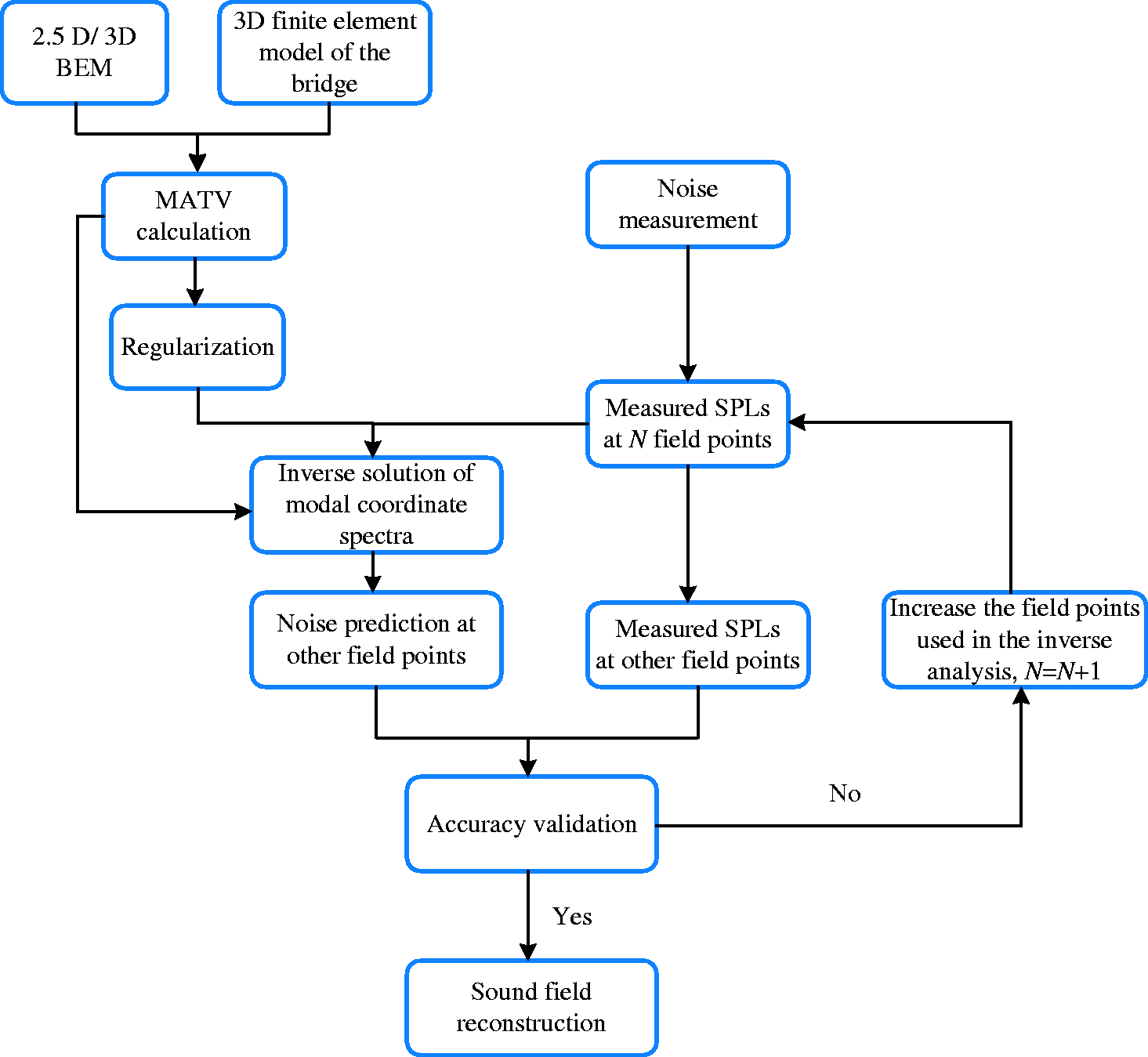
Flow diagram of the inverse BEM procedure.
Numerical and experimental validation
A box girder concrete bridge
A three-span simple box girder concrete bridge with the standard span length of 30 m (Fig. 2) was selected to investigate the accuracy of the proposed inverse method. First, the train–track–bridge dynamic model and 2.5D BEM-based acoustic model 13 were used to predict the sound pressure emitted from the box girder bridge. 3D finite elements and multiple rigid bodies were chosen to model the bridge and vehicles, respectively. The stiffness of the rail fastener in the horizontal and vertical directions used in this study was 20 and 60 MN/m, respectively. The damping of the fastener in the horizontal and vertical directions was set at 60 and 80 kN s/m, respectively. The four-axle trains comprised seven vehicles, with detailed model parameters listed in Li et al. 2 The rail roughness was generated in accordance with the rail limit roughness spectrum given in the ISO 3095 standard 34 in the space domain by using a trigonometric series method. 2 The MATVs of the bridge were calculated using the 2.5D BEM. 13 The acoustic field point mesh is shown in Figure 3, with a total width of 30 m and height of 15 m.
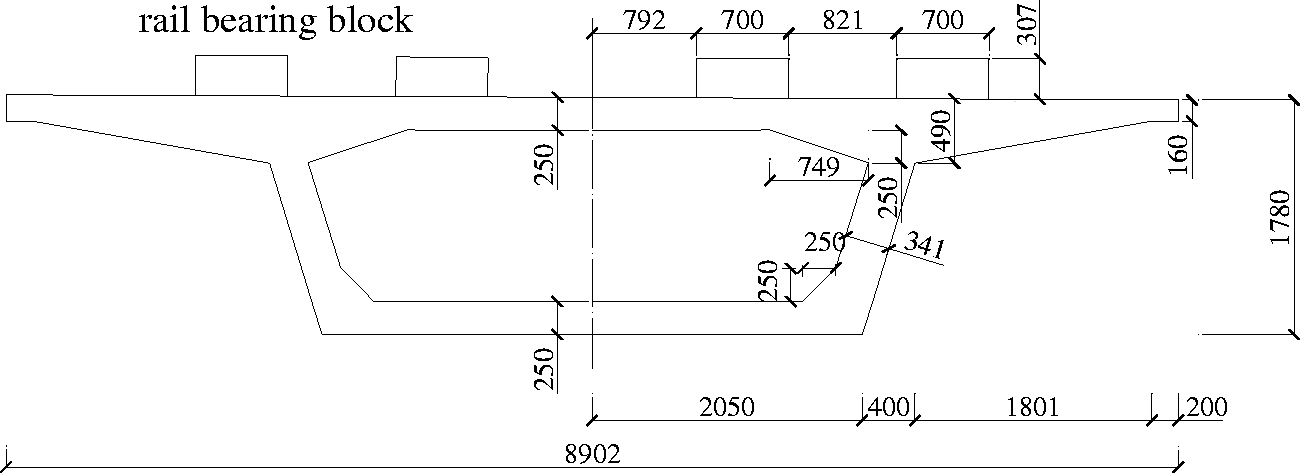
Geometry of the box girder bridge (unit: mm).
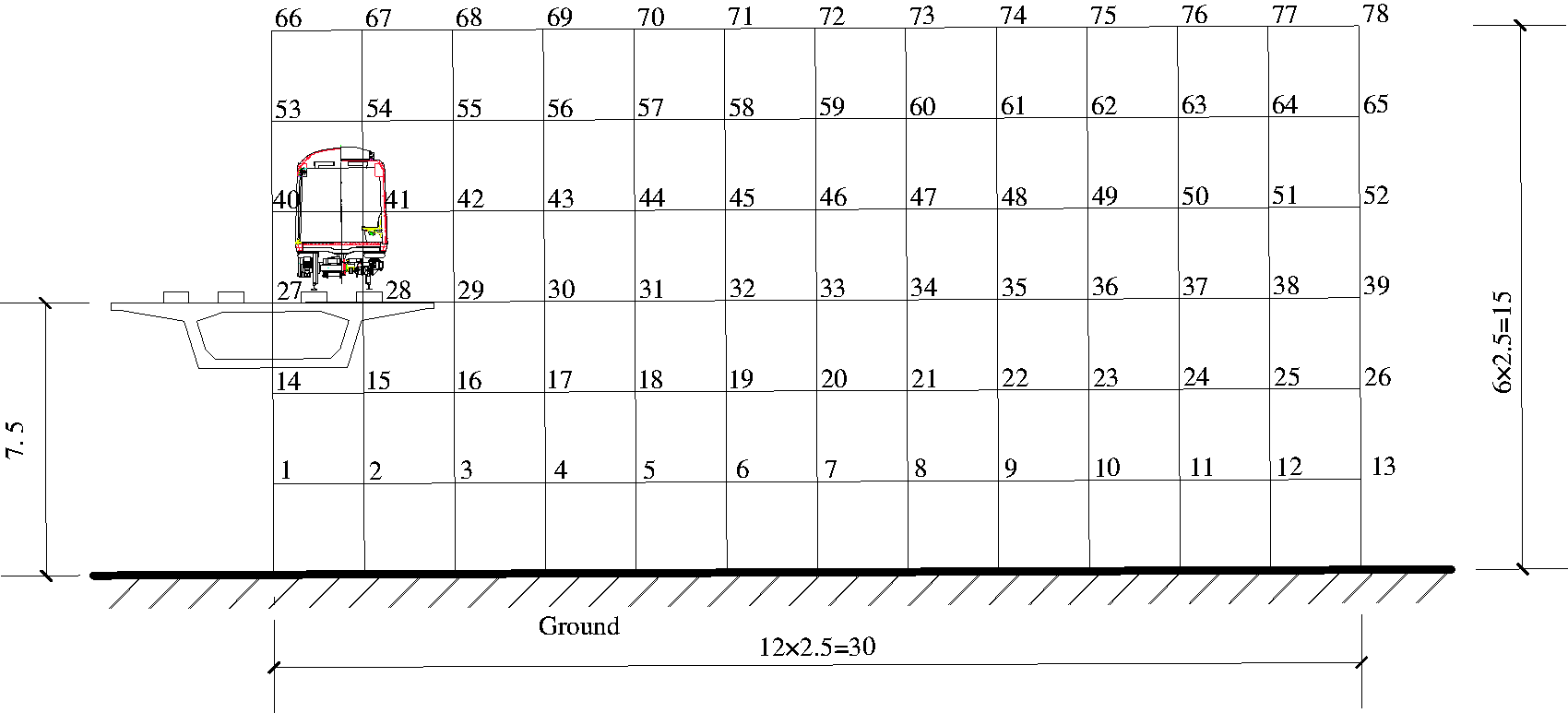
Field point mesh of the box girder bridge (unit: m).
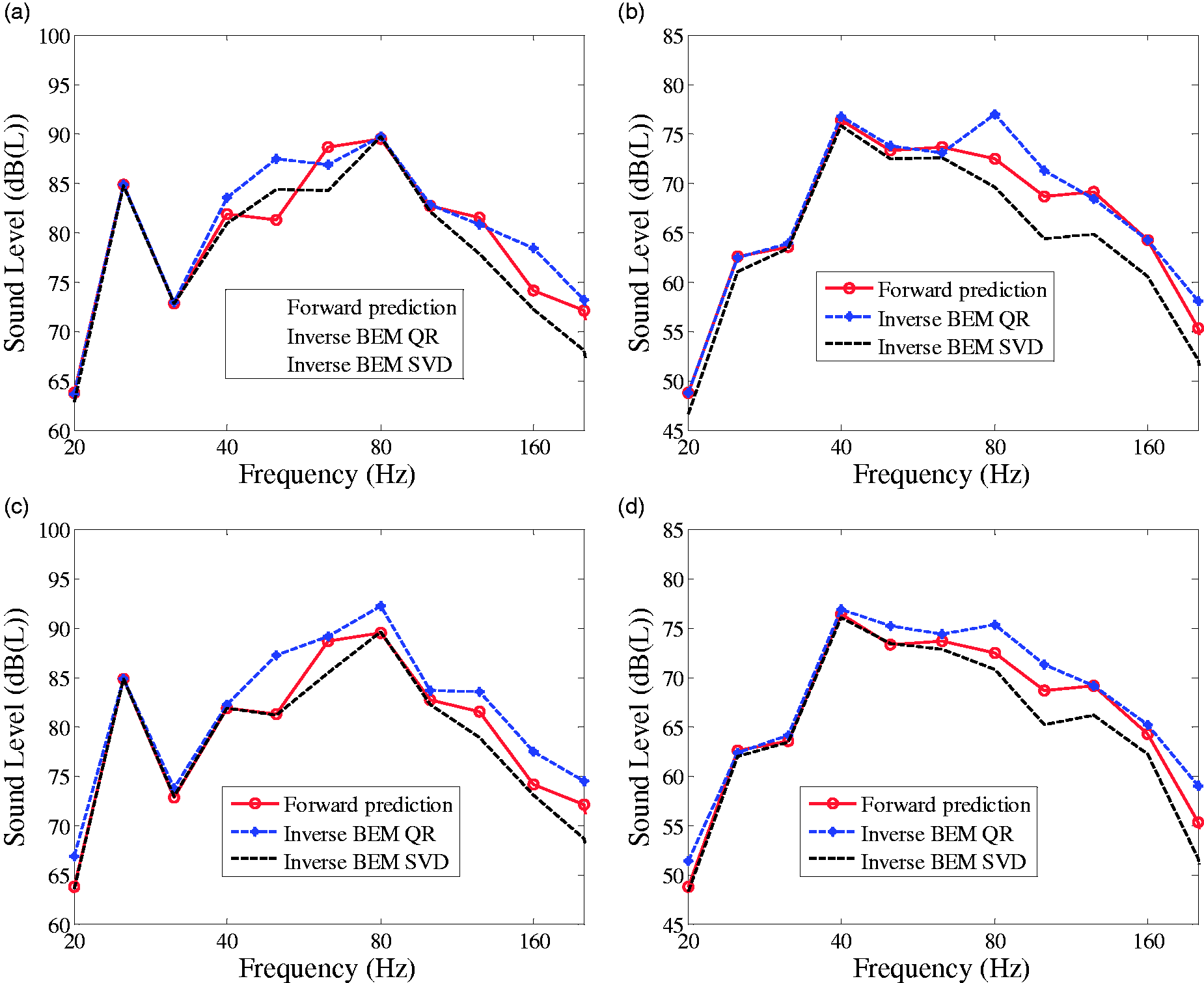
A small number of field points were then selected and treated as virtual measurement points, and the sound pressure spectra
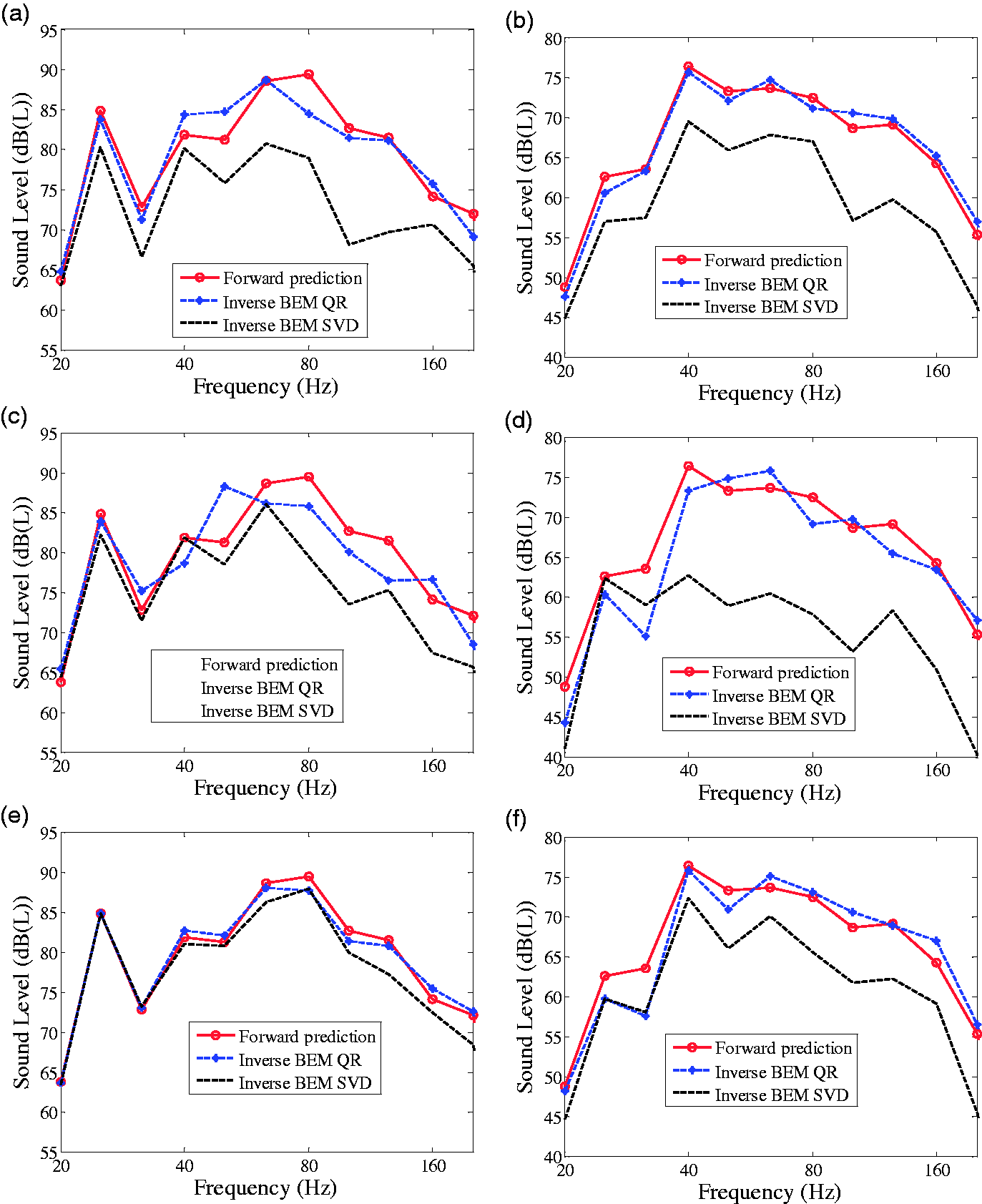
SPLs at different field points: (a) field point 28, case B-1; (b) field point 78, case B-1; (c) field point 28, case B-2; (d) field point 78, case B-2; (e) field point 28, case B-3 and (f) field point 78, case B-3.
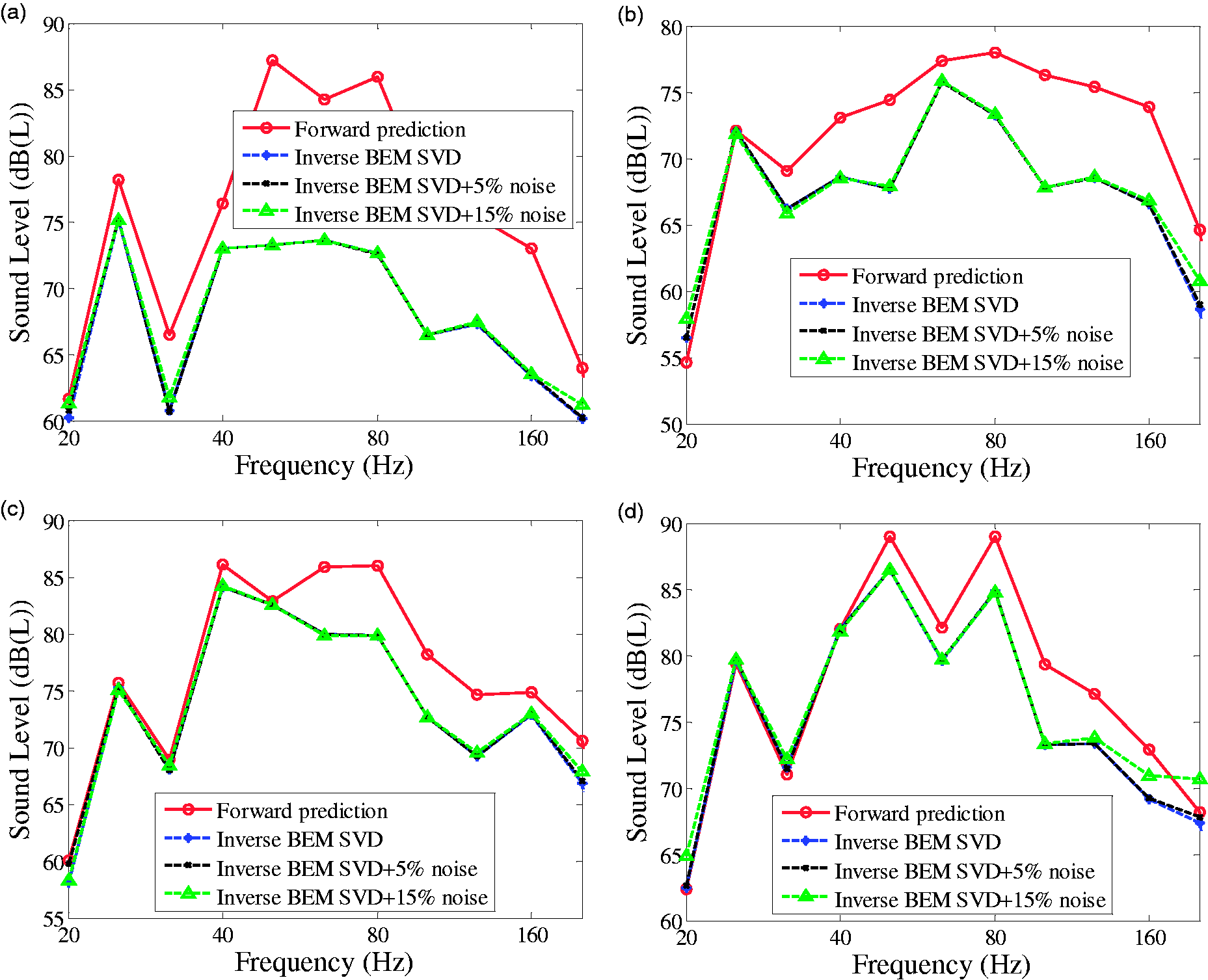
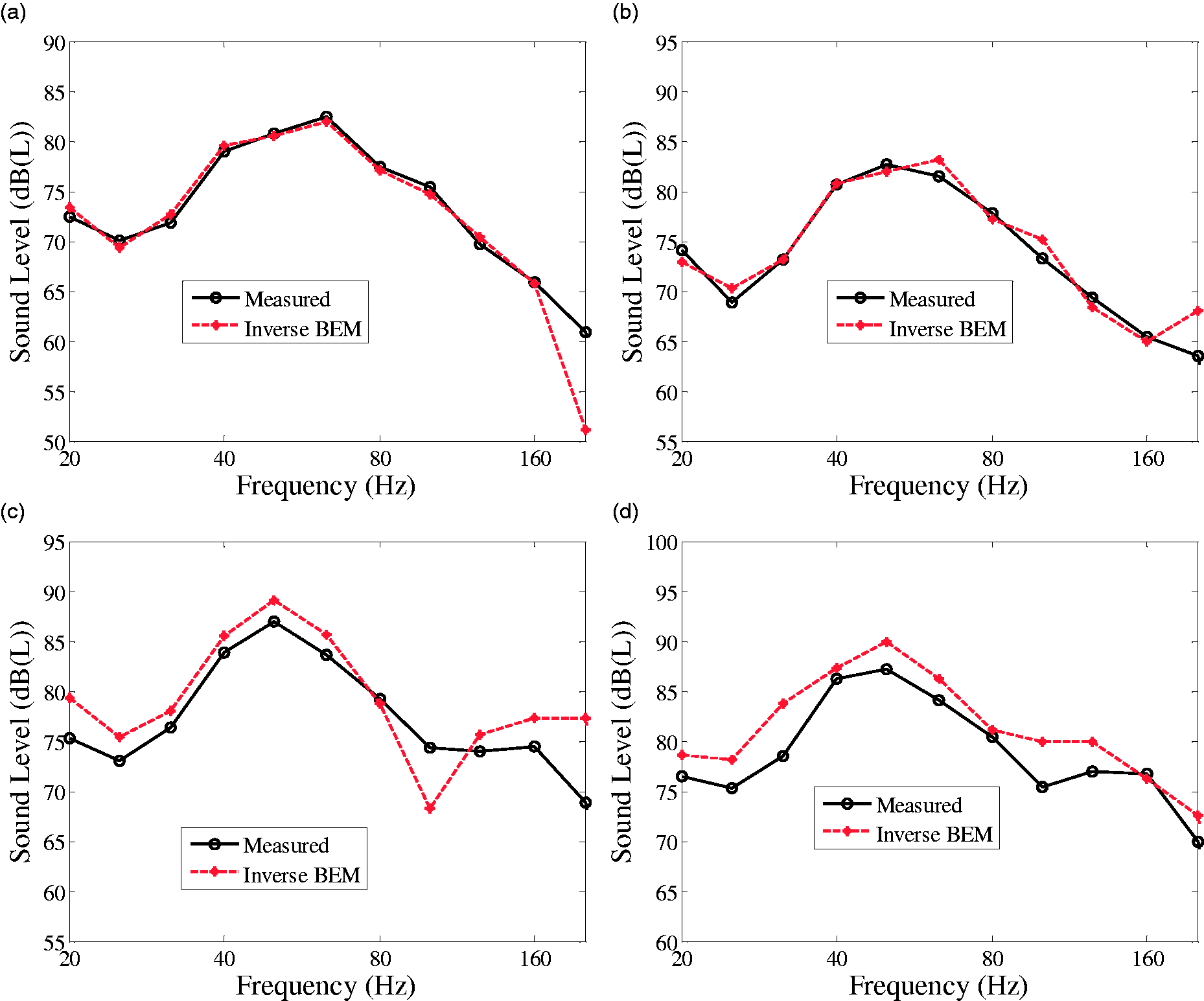
SPLs at different field points: (a) field point 28, case B-4; (b) field point 78, case B-4; (c) field point 28, case B-5 and (d) field point 78, case B-5.
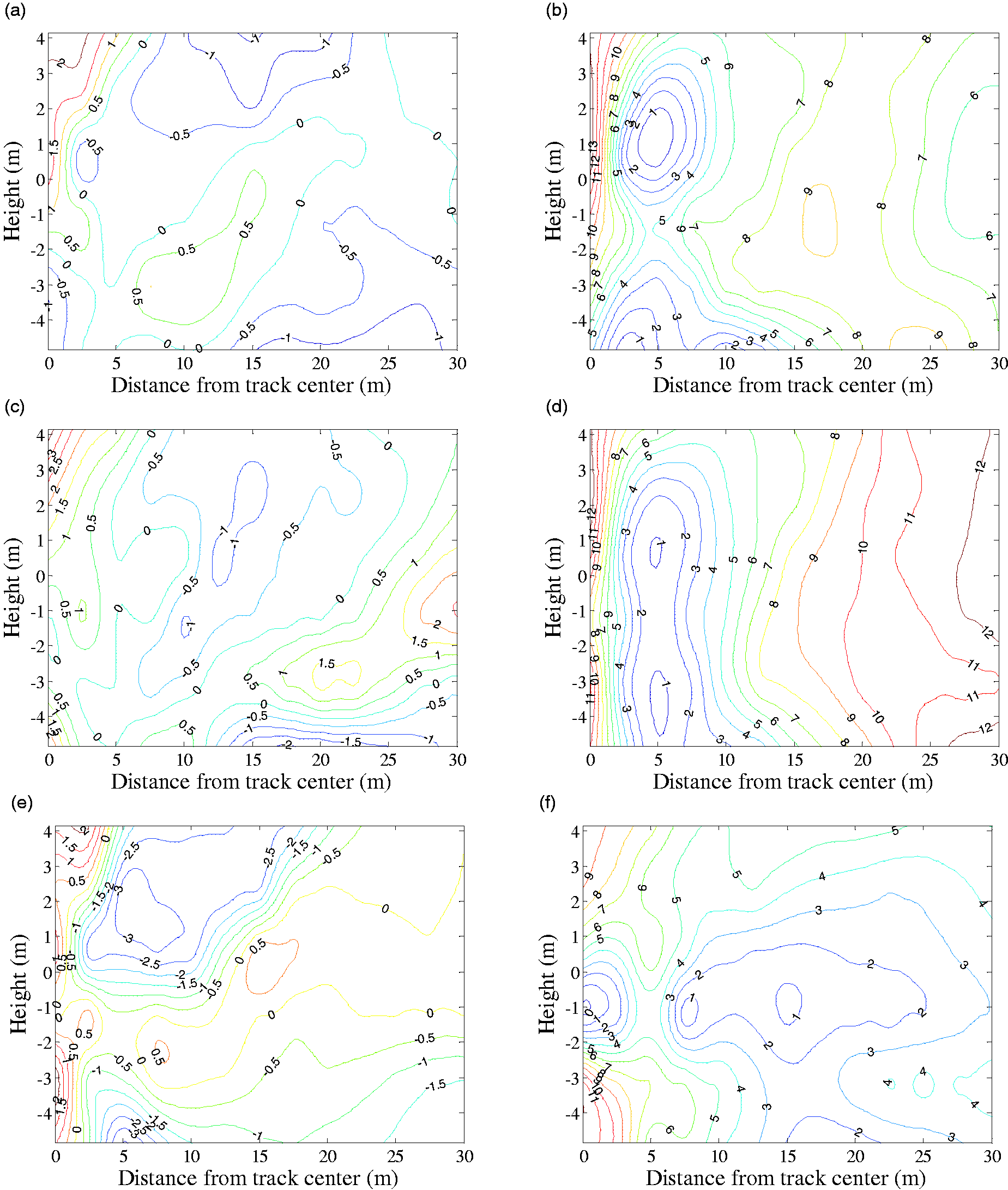
Contour maps of the difference between the forward prediction and the inverse BEM (unit: dB): (a) QR, case B-1; (b) SVD, case B-1; (c) QR, case B-2; (d) SVD, case B-2; (e) QR, case B-3 and (f) SVD, case B-3.
Contour maps of the difference between the forward prediction and the inverse BEM (unit: dB): (a) QR, case B-4; (b) SVD, case B-4; (c) QR, case B-5 and (d) SVD, case B-5.
Cases of pseudo-measurement positions for the box girder bridge.
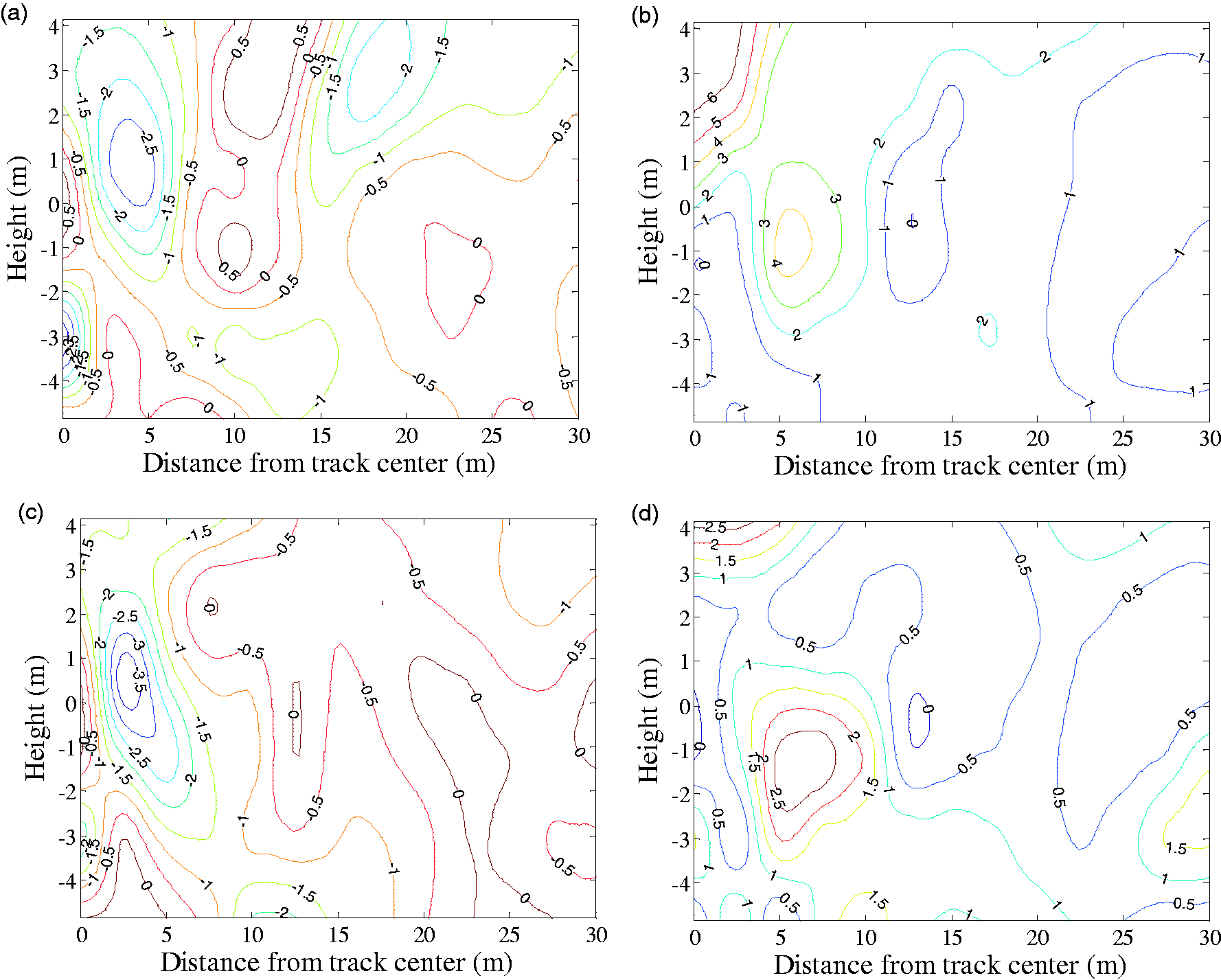
To study the stability of the inverse method, 5 and 15% white Gaussian noise was added to the sound pressure data at the virtual measurement points listed in Table 1. The sound field was then reconstructed. Figures 8 and 9 show the recovered solutions with different cases using QR factorisation and SVD with Tikhonov regularisation, respectively. The added white Gaussian noise has insignificant influence on the reconstructed SPLs at most frequency bands, and only a slightly larger error occurs at some frequency bands with the additional increase of noise. Comparison between Figures 8 and 9 shows that many more field points are needed to lead to good reconstruction while using SVD with Tikhonov regularisation in the presence of Gaussian noise. Furthermore, the QR factorisation method is more sensitive to the added noise, while the SVD method is more stable in the presence of data noise. Figures 10 and 11 give contour maps of the difference between the accurate forward prediction and the reconstructed results with 15% noise using the two methods. Figure 10 shows that reasonably good reconstruction can be achieved in the whole space when using the QR factorisation method, even with 15% white Gaussian noise (maximum error less than 3.5 dB). Figure 11 shows that when sufficient field points are used, the SVD method can also lead to good results in the presence of 15% white Gaussian noise (maximum error less than 2.5 dB).
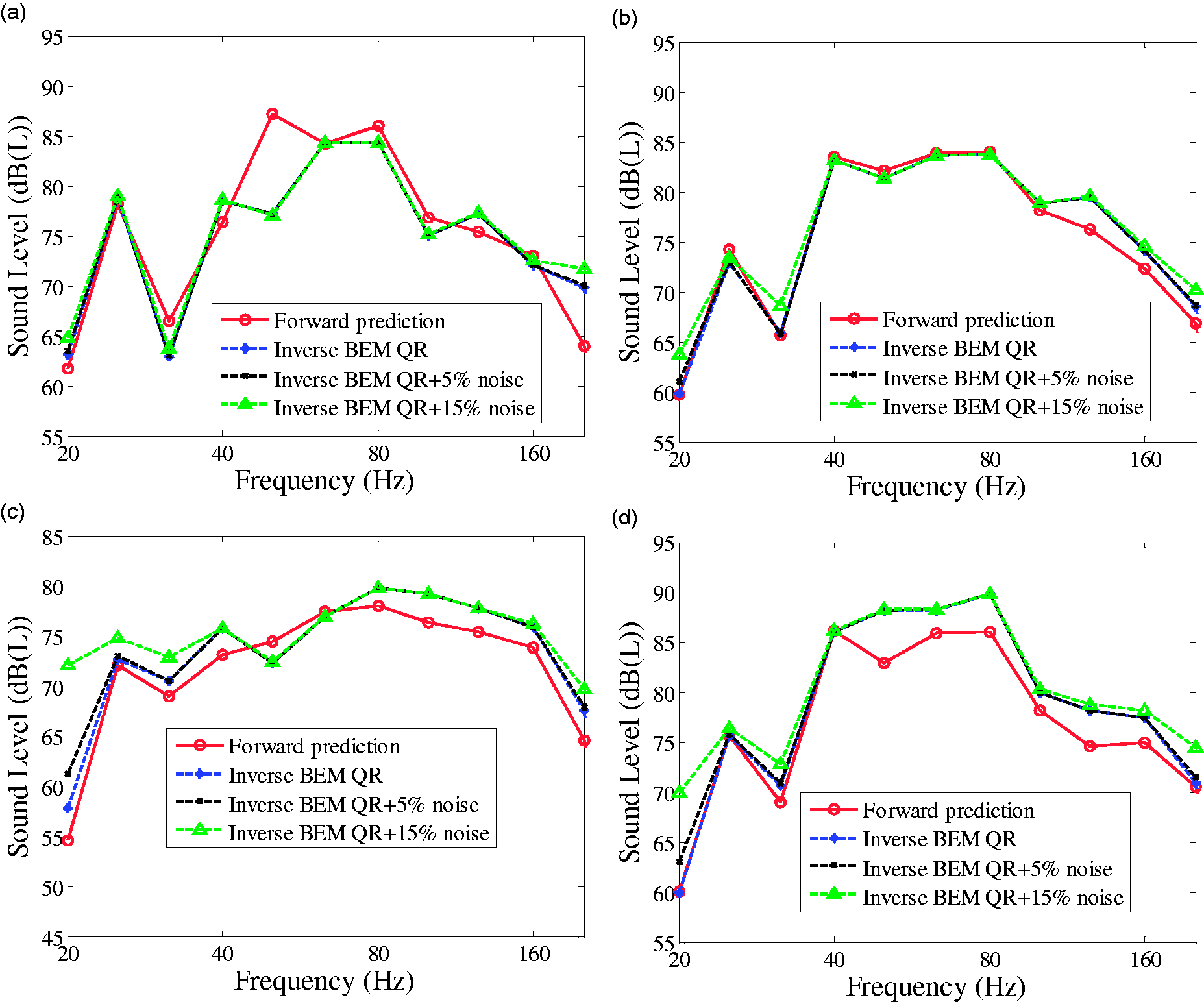
SPLs at different field points (QR): (a) field point 67, case B-1; (b) field point 55, case B-2; (c) field point 5, case B-3 and (d) field point 42, case B-4.
SPLs at different field points (SVD): (a) field point 67, case B-1; (b) field point 5, case B-3; (c) field point 42, case B-4 and (d) field point 66, case B-54.
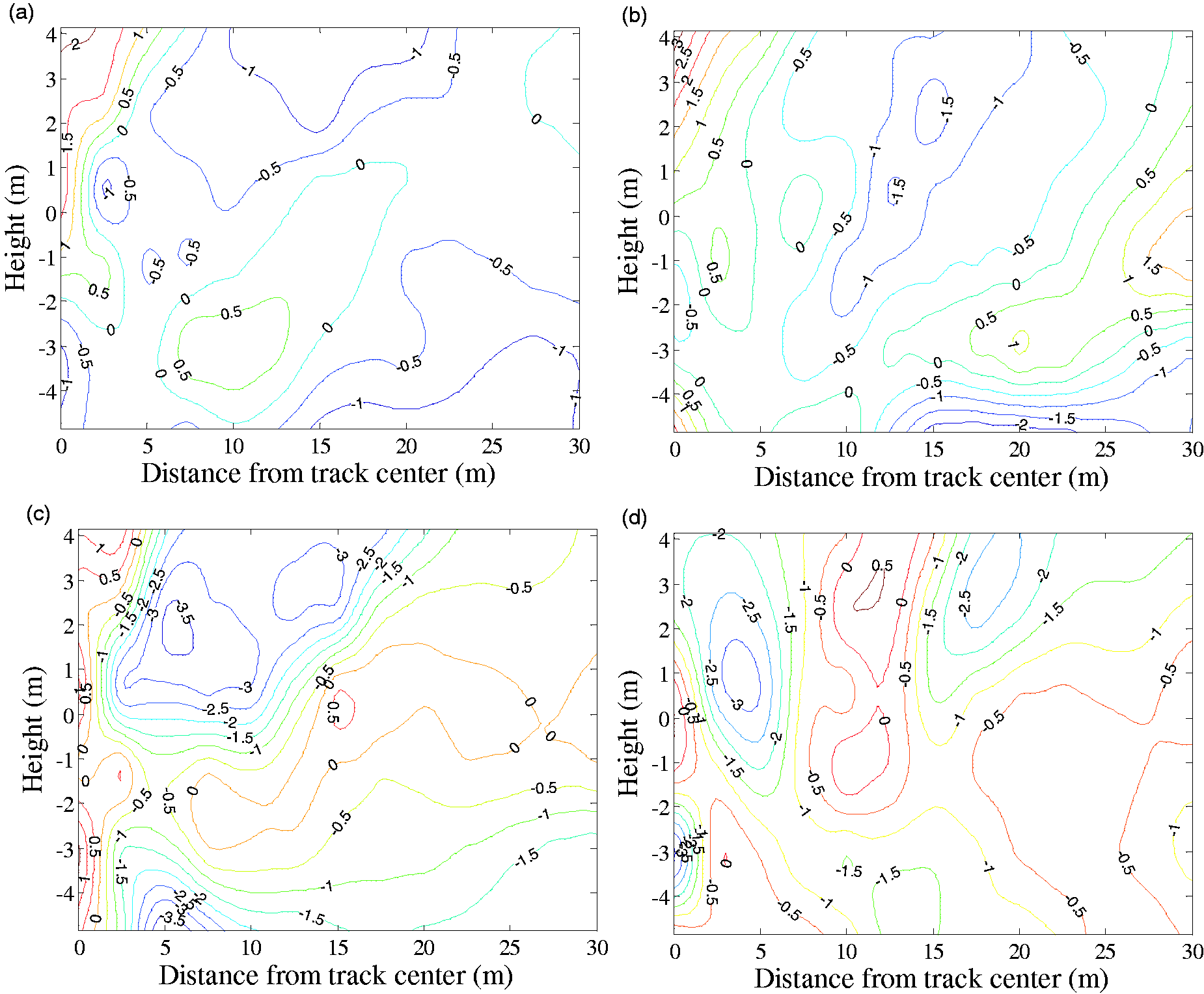
Contour maps of the difference between the forward prediction and the inverse BEM with 15% noise (unit: dB): (a) QR, case B-1; (b) QR, case B-2; (c) QR, case B-3 and (d) QR, case B-4.
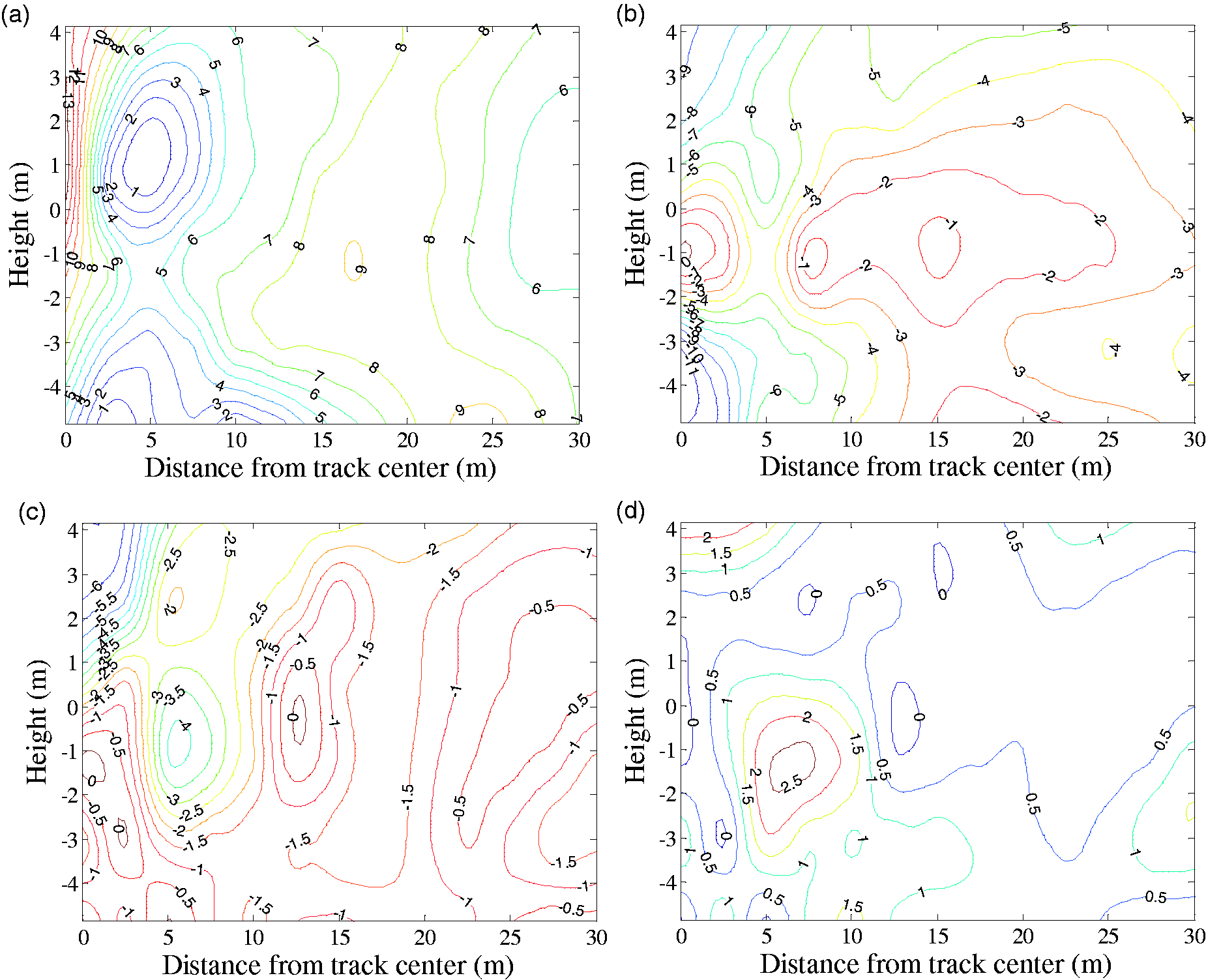
Contour maps of the difference between the forward prediction and the inverse BEM with 15% noise (unit: dB): (a) SVD, case B-1; (b) SVD, case B-3; (c) SVD, case B-4 and (d) SVD, case B-5.
Note that the mode shapes of the finite element model are usually different from those of the real bridge. Thus, the box girder bridge was varied by reducing the elastic modulus of the rail-bearing blocks by 5% to simulate local stiffness degradation and mode shape difference between the measurement and numerical model. The mode shapes of the varied model, which differed from the modes used in the forward prediction, were then used for noise reconstruction. The contour maps of the difference between the predicted and reconstructed results are shown in Figure 12. This reveals that good accuracy can be achieved even if a varied model is used for noise reconstruction. Thus, the proposed inverse BEM is a robust and reliable numerical method.
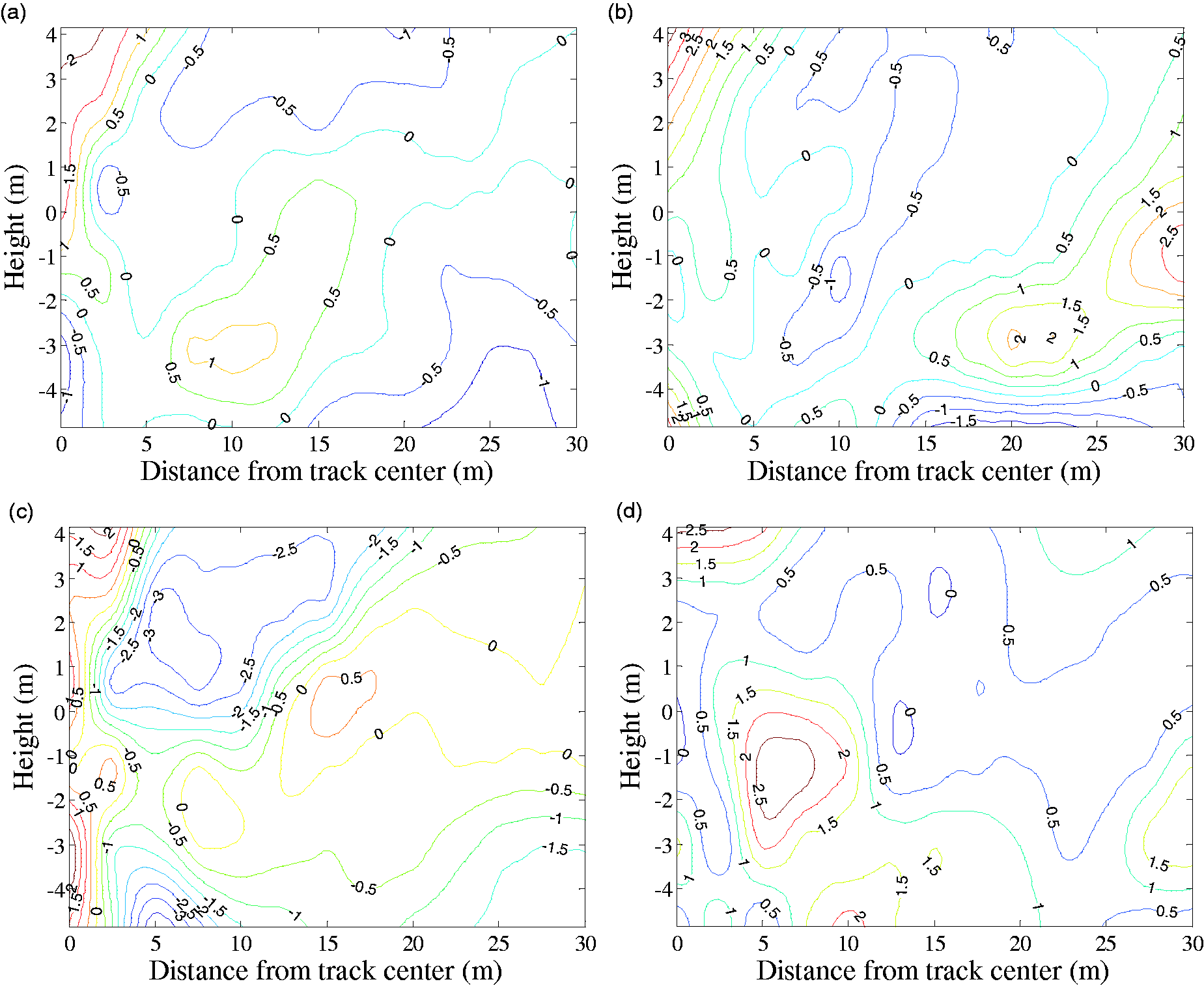
Contour maps of the difference between the forward prediction and the inverse BEM with a varied structure (unit: dB): (a) QR, case B-1; (b) QR, case B-2; (c) QR, case B-3 and (d) SVD, case B-5.
Two U-shaped girder concrete bridges
A simple U-shaped concrete girder used in Shanghai metro line 8 (Figure 13(a)) and another U-shaped concrete girder used in Shanghai metro line 16 (Figure 13(b)) were chosen to further study the application and suitability of the inverse procedure. The standard span lengths of the two U-shaped girders are 25 and 30 m, respectively. Field tests were conducted to record the sound pressures radiating from the U-shaped girder induced by passing trains in lines 8 and 16, respectively. Five microphones in the same plane were installed beneath the U-shaped girder at the mid-span of line 8 (Figure 14). Six microphones were installed around the bridge of line 16 (three above the girder and three beneath), as shown in Figure 15. A 3D finite element model and 2.5D boundary element model were developed to obtain the MATVs of the U-shaped girders. 13 The ground and structure surface were set to be rigid in the acoustic model. The QR factorisation method was used in the following study due to the limited number of measurement points.
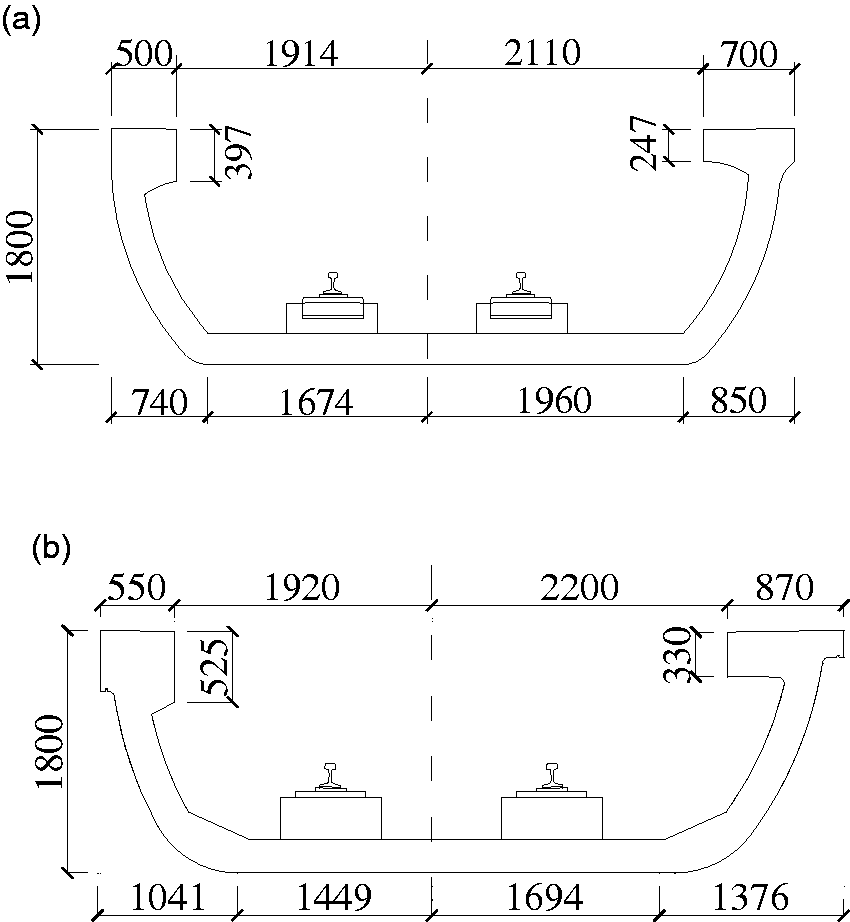
Cross sections of the U-shaped girder bridges (unit: mm): (a) line 8; (b) line 16.
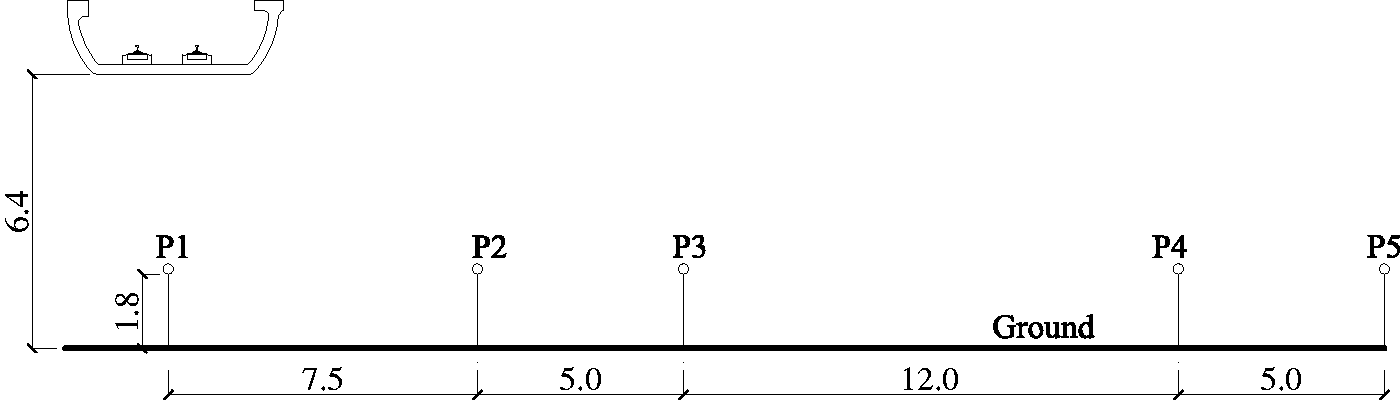
Layout of measurement positions of line 8 (unit: m).
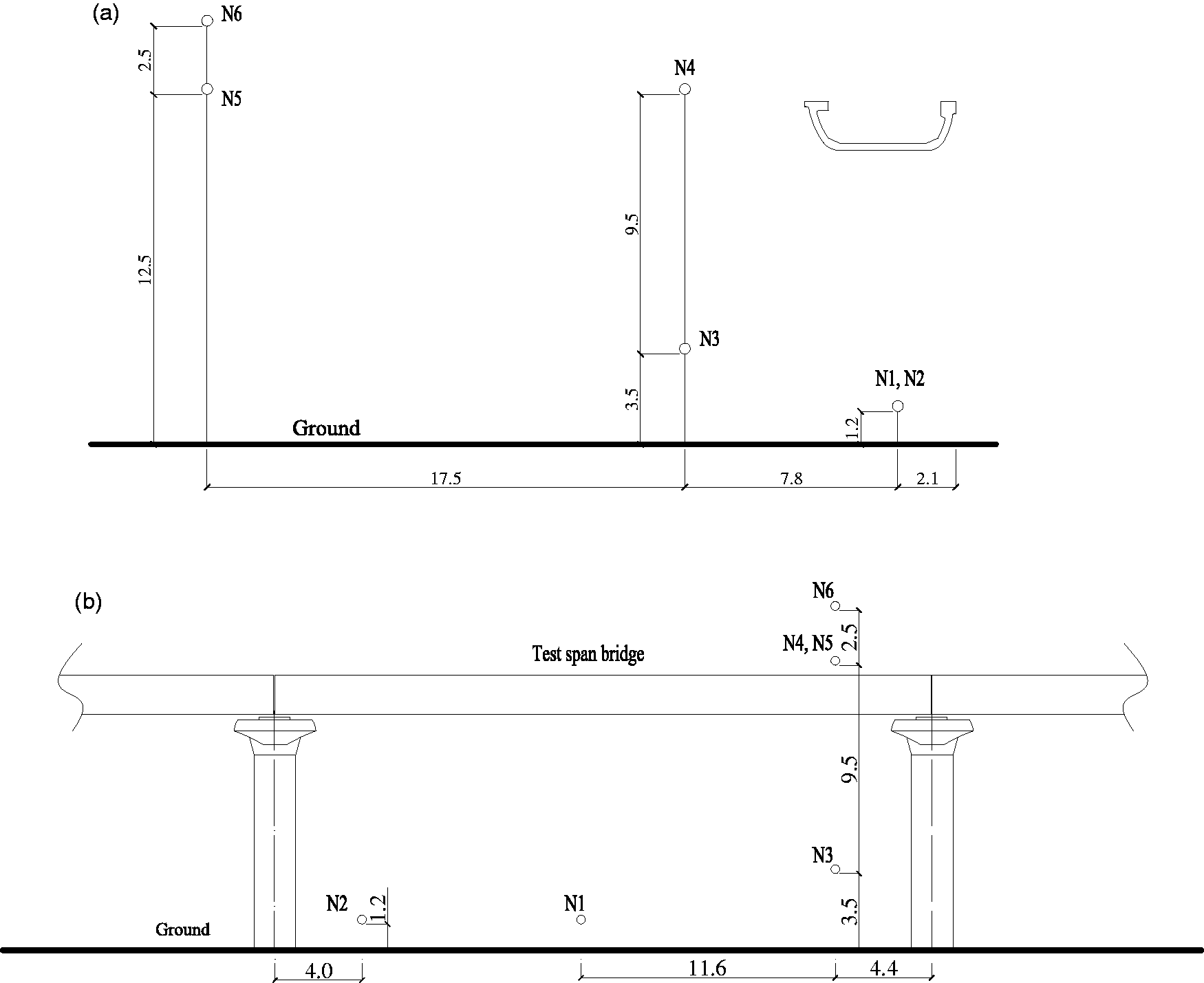
Layout of measurement positions of line 16 (unit: m): (a) section view; (b) elevation view.
The natural frequencies and mode shapes obtained from the finite element model differ from the results of the measurements. Thus, the finite element model should be updated in accordance with the measurements. However, the high-order mode shapes are usually local vibrations, which are difficult to directly identify from measurement. For the field tests conducted in this study, a very limited number of accelerometers were used to record bridge vibrations. Thus, only the first vertical and lateral natural frequencies were identified from measurement. The first-order lateral and vertical natural frequencies of the bridge (line 8) identified were 2.235 and 4.249 Hz, respectively. The finite element model was then tuned by modifying the elasticity modulus and mass of the bridge. The first lateral and vertical natural frequencies of the updated finite element model were 2.238 and 4.360 Hz, respectively.
The measured results of four field points in line 8 were first used to reconstruct the acoustic field, and the results of the unused field point obtained using inverse analysis were then compared with the measurement. The cases of field points used in the inverse analysis for line 8 are listed in Table 2. Figures 16 and 17 compare the SPLs between the measurement and inverse BEM, with train speeds of 56 and 76 km/h, respectively. Generally, good agreement was found between the measurement and the reconstructed SPLs at most frequency bands with different train speeds.
Comparison between measured and inverse BEM SPLs in line 8, train speed 56 km/h: (a) P5, case U8-1; (b) P4, case U8-2; (c) P3, case U8-3 and (d) P2, case U8-4.
Comparison between measured and inverse BEM SPLs in line 8, train speed 76 km/h: (a) P5, case U8-1; (b) P4, case U8-2; (c) P3, case U8-3 and (d) P2, case U8-4.
Cases of the inverse analysis for the U-shaped girder bridge in line 8.
The SPLs of the U-shaped girder bridge in line 8 were simulated using forward prediction in our previous work. 13 Song et al. 13 showed that the SPLs obtained using forward prediction were smaller than the measured results, especially for the far field point (P5, about 3 dB error). Figure 18 shows the contour maps of the SPLs obtained using the inverse method proposed in this study and those obtained from forward prediction as presented in Song et al. 13 The sound pressure distribution of the two pictures is similar. The reconstructed SPLs are slightly larger than the forward prediction, which agrees better with the measurements.
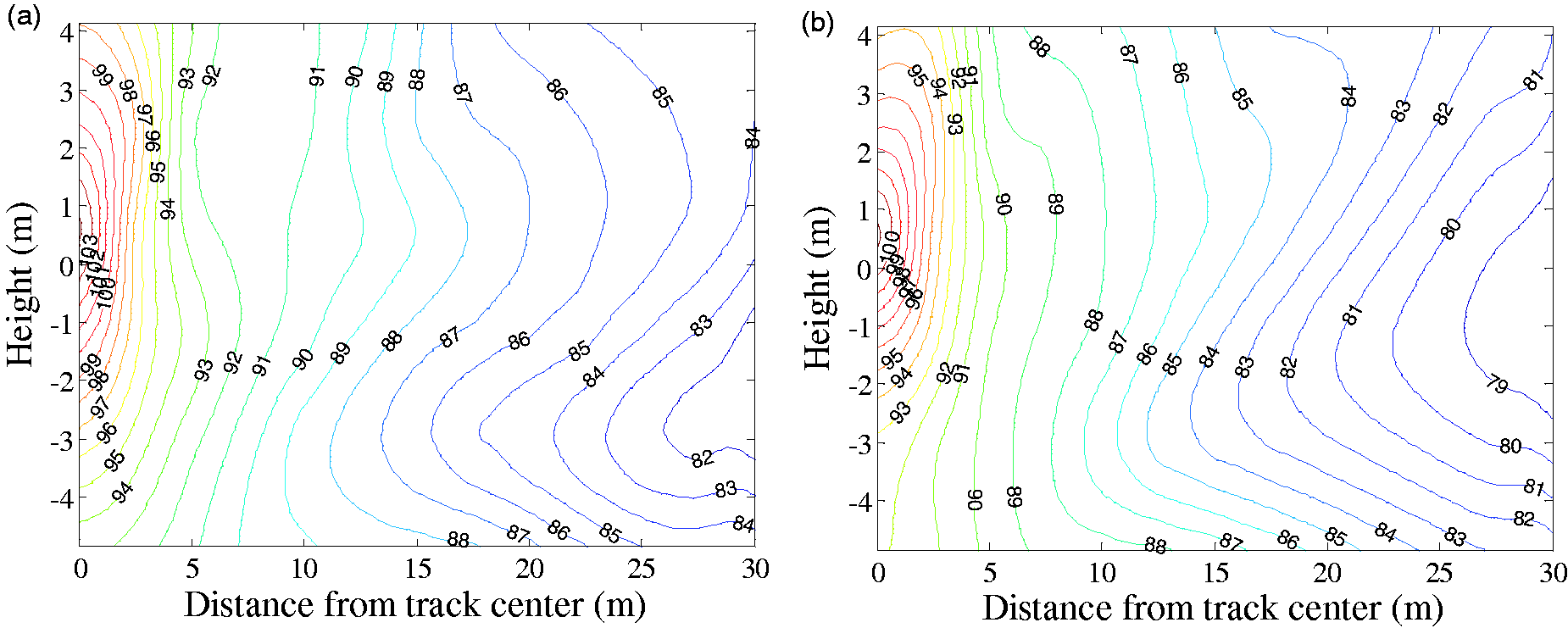
Contour maps of the U-shaped girder bridge in line 8 (unit: dB): (a) inverse method, U8-1; (b) numerical method. 13
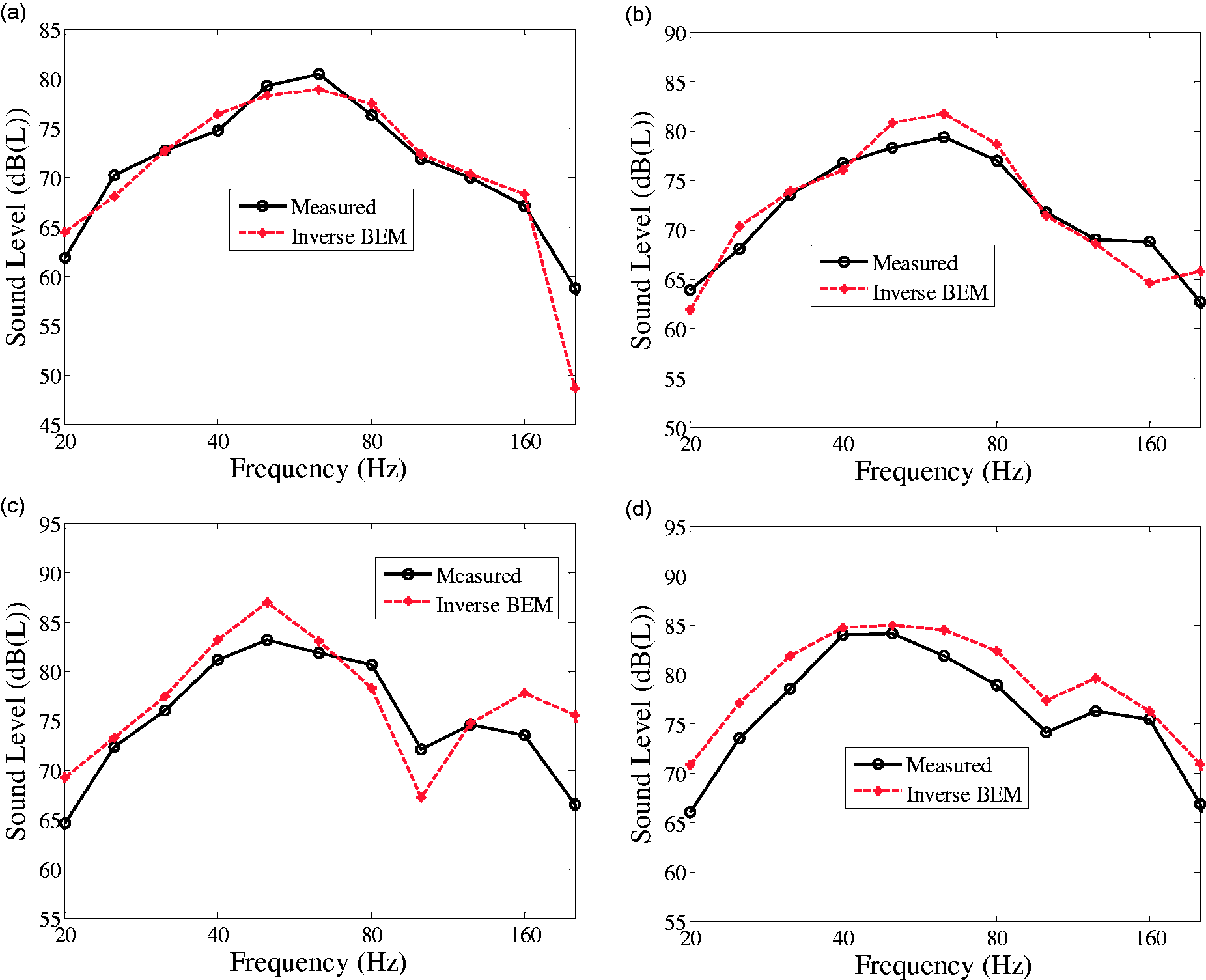
The measured data of four field points in line 16 were also used to reconstruct the corresponding acoustic field, and the results of the remaining two field points were used for validation. Table 3 lists the three cases used in the inverse analysis. Figures 19 and 20 show the SPLs of the remaining two field points in each case obtained from measurement and inverse analysis, with train speeds of 80 and 100 km/h, respectively. It can be seen from the comparison that the reconstructed results agree well with the measured SPLs, provided that no fewer than four field points are used in inverse analysis.
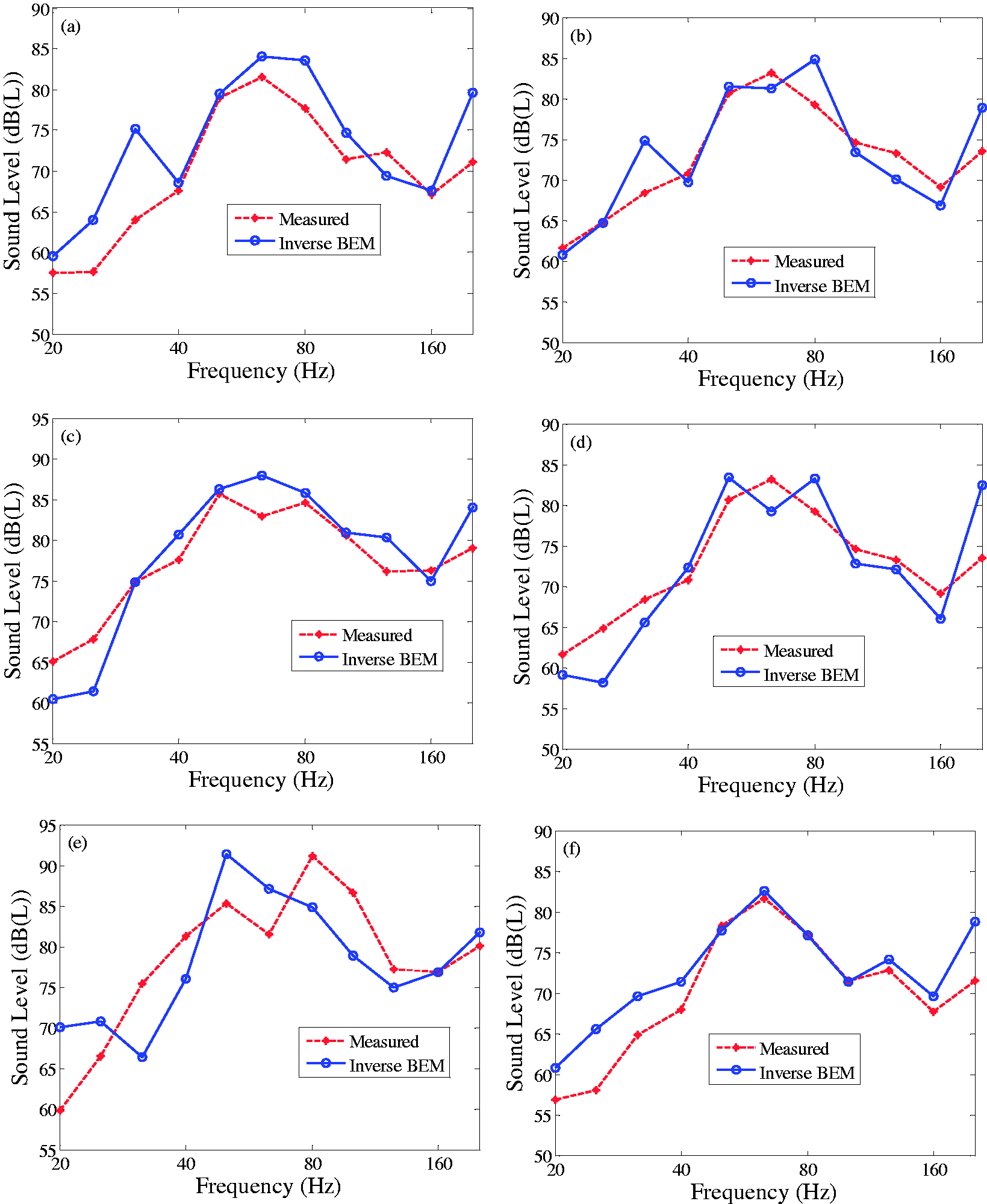
Comparison between measured and inverse BEM SPLs in line 16, train speed 80 km/h: (a) N5, case U16-1; (b) N6, case U16-1; (c) N4, case U16-2; (d) N6, case U16-2; (e) N3, case U16-3 and (f) N5, case U16-3.
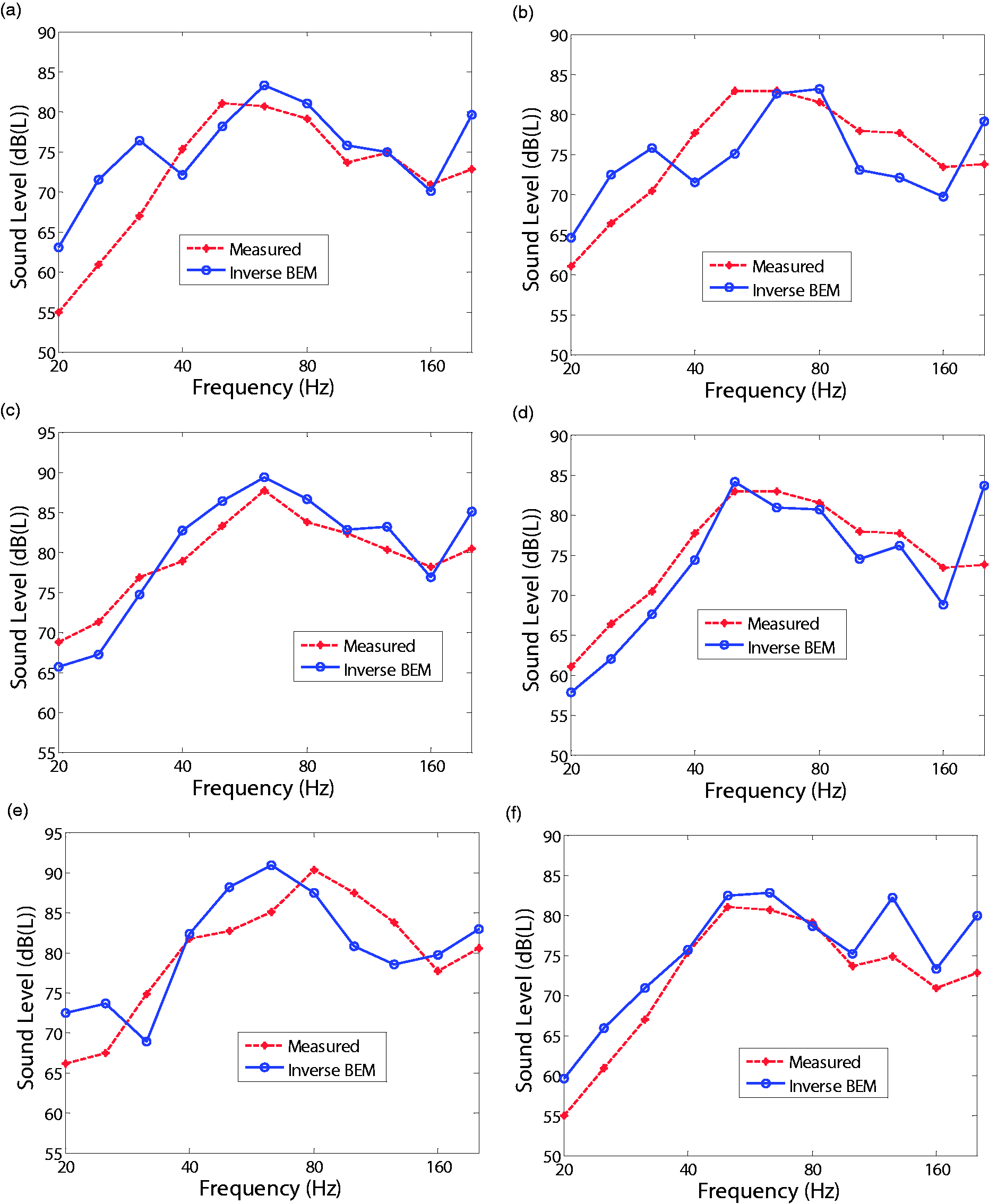
Comparison between measured and inverse BEM SPLs in line 16, train speed 100 km/h: (a) N5, case U16-1; (b) N6, case U16-1; (c) N4, case U16-2; (d) N6, case U16-2; (e) N3, case U16-3 and (f) N5, case U16-3.
Cases of the inverse analysis for the U-shaped girder bridge in line 16.
Conclusions
An inverse procedure was presented to reconstruct the acoustic field radiating from bridges by combining the MATVs and the SPLs at a small number of measurement points. First, the sound radiation of a concrete box girder bridge was calculated using a forward prediction method, and the associated numerical results were utilised to validate the accuracy and robustness of the inverse procedure. Field tests of two U-shaped girders were then used for further validation. Three major conclusions can be drawn from this study:
MATV-based inverse analysis needs only a small number of measurement points to enable an accurate reconstruction of the acoustic field radiating from bridges, which reduces the requirement for test equipment. To perform accurate inverse analysis for the simple bridges used in this study, SVD with Tikhonov regularisation needs many more measurement points than QR factorisation with column pivoting. Reasonably good reconstruction of the bridge noise can be achieved when four to five field points are used in the inverse analysis with the QR-factorisation method. The inverse method is reliable and robust even with 15% white Gaussian noise added to the sound pressure data.
More field measurements should be conducted to further verify the accuracy and adaptability of the proposed procedure.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: The study was supported by the National Natural Science Foundation of China (No. 51608116), and the Natural Science Foundation of Jiangsu (No. BK20160681).