
Abstract
In this paper an analysis of the nonlinear dynamic behavior and control of an atomic force microscope system is described. Phase plane trajectories, spectrum analysis, bifurcation analysis, the Poincare cross-section, the maximal Lyapunov exponent, and other numerical analysis methods were used to observe and verify the dynamic characteristics and the differential equations for the system. The results showed that at specific excitation frequencies, the system will exhibit nonlinear behavior that may be cyclic, multi-cyclic or acyclic. A Psim circuit simulation using the same parameters showed the same nonlinear behavior, as did laboratory circuit implementations. The results also showed than an understanding and control of the dynamic characteristics would not be an easy task. However, they could be used as a basis for the suppression and control of nonlinear behavior and vibration in atomic force microscope systems. A proportional-derivative system was also used, with particle swarm optimization, to find the control parameters Kp and KD and a fuzzy controller was used to compare the results. The controller simulation and hardware implementation both effectively inhibited the nonlinear behavior and were most helpful for the control and enhancement of measurement accuracy.
Keywords
Introduction
The atomic force microscope (AFM) is a kind of scanning probe microscope that can image almost any type of specimen surface, including polymers, ceramics, glass, and biological samples. It can operate in a vacuum, gas or liquid environment. Atomic force microscopy is used in many different fields, strength of materials, biotechnology, 1 micro-electro-mechanical systems, and many others. Scanning can be carried out in several different ways: contact mode, non-contact mode, 2 and tapping mode. The extensive use of AFM has resulted in a substantial amount of research. Many studies of cantilever action and the forces involved have been made and a theory has arisen with respect to nonlinear cantilever behavior.3,4 Any nonlinear interaction between the probe tip and the sample surface can seriously affect the proper dynamic behavior of the cantilever.
In 1999, Aimé et al. investigated a nonlinear oscillation model with a single degree of freedom using perturbation to calculate the dynamic behavior of the micro-cantilever associated with the van der Waals force. Results showed that linear analysis cannot be used to explain the frequency drift phenomenon, nor why frequency drift becomes greater when there are small changes in the distance between the probe and the sample. The nonlinear behavior of an oscillation model allows observation of the relationship between resonant frequency drift and the distance between the probe and the sample. 5 Ashhab et al. considered the van der Waals force 6 and Lennard-Jones potential energy 7 in a single degree of freedom oscillator model. They analyzed the dynamic behavior of the system using sinusoidal excitation and used the Melnikov method to predict the chaos which is likely to appear when the damping, excitation frequency, and balance of the system are within a certain range. Galerkin truncation is a relatively common method used in the study of nonlinear problems, and in 2003, Rützel et al. used first-order Galerkin truncation to study free cantilever and excitation vibration parameters in Lennard-Jones potential energy. 8 Burnham et al.'s study9,10 showed that the dynamic behavior of an AFM system micro-cantilever will become chaotic under certain specific conditions.
To enhance the measurement accuracy of the AFM, dynamic analysis was used to study the nonlinear behavior of the probe where chaotic phenomena appeared in the presence of nonlinear force. To counter the impact of irregular chaotic oscillation on measurement resolution, proportional-derivative (PD) and fuzzy control11–13 were used for comparison and suppression. Particle swarm optimization (PSO) 14 and the genetic algorithm (GA)15,16 were used to search for the parameters Kp and KD to be used for control and stabilization of the AFM operation. The inhibitory effect of the controllers was compared to increase the reliability of the algorithms and parameters. Psim circuit simulation was used to verify the nonlinear dynamic characteristics in a mathematical model of an AFM system and was also the basis for implementation of the model as an actual physical circuit. This study provides a thorough understanding of the nonlinear behavior of an AFM system using PD and fuzzy control for the inhibition of irregular system behavior.
Dynamic analysis
The theoretical analysis of AFM
This section describes the AFM differential equation (1) proposed by Rützel et al.
8
When the Lennard-Jones potential formula is used to calculate the van der Waals force between the probe tip and the surface atoms of the sample, it is assumed that the Bernoulli-Euler beam theory is applicable, the impact of the axial force on the boom is negligible, and the cantilever and sample material is Si–Si (111)17–19
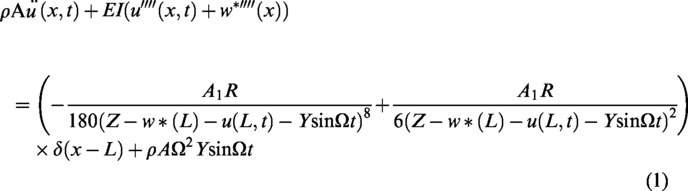
Figure 1 shows several stages of deformation of the AFM cantilever and its relationship with the sample. Figure 1(a) shows the first state in the equation where the cantilever is stationary and in equilibrium. At this time the distance from the probe tip to the sample surface is Z, as shown in the figure. The second state, seen in Figure 1(b) illustrates the interaction of the applied force between the probe tip atoms and the sample surface atoms. Here the cantilever shows a deflection of
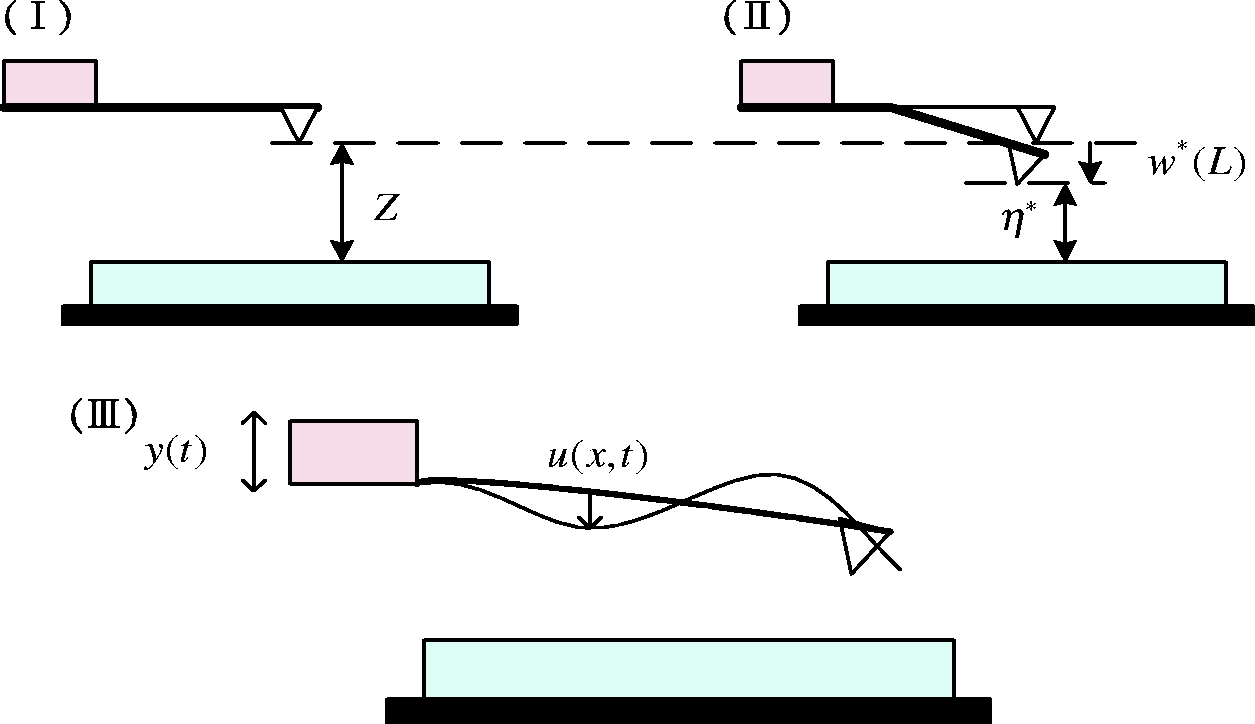
Atomic force microscope cantilever deformation in the tapping mode.
The equation (1) is made dimensionless and simplified,
8
to give the dimensionless mathematical model shown below


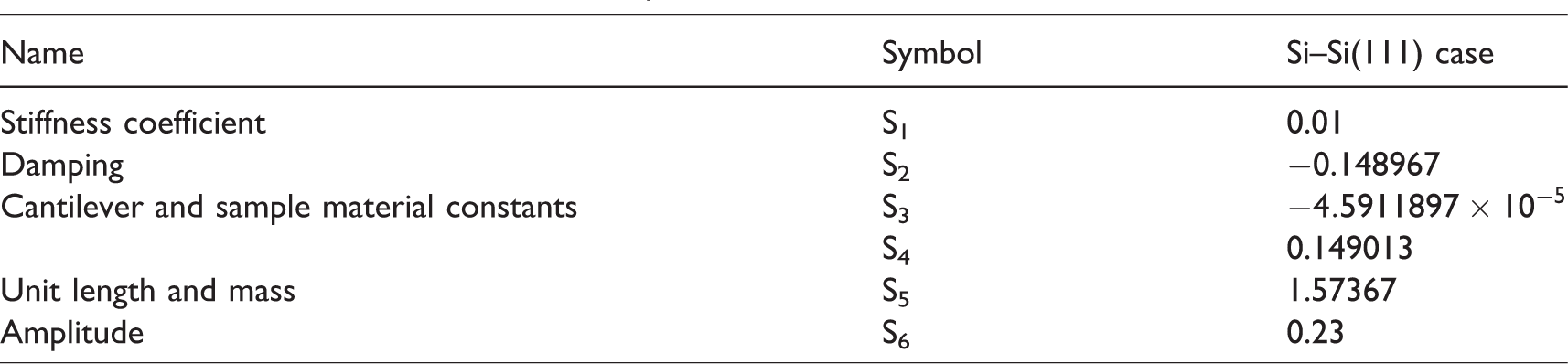
In these equations, X1 represents the displacement of the probe tip. The fourth and fifth terms in equation (3) are van der Waals force calculated by the dimensionless Lennard-Jones potential formula. The last term is the cantilever harmonic motion, and Ω is the exciting frequency explored by dynamic analysis in this study, the other parameters are shown in Table 1.
Coefficients of the dimensionless equation.
Analysis of nonlinear behavior
Parameter definitions
This section focuses on the observation and exploration of nonlinear behavior generated by the system at excitation frequency Ω under different parameters. The relevant parameter values S1∼S6, 10 are set as shown in Table 1, the dimensionless equations (2) and (3) are then used with Matlab/Simulink to simulate an AFM system. The differential equations are solved using the Runge-Kutta method. The solution involves the use of five kinds of numerical analysis to verify consistency of the dynamic behavior of the system.
Phase plane trajectories
Figure 2 shows traces of the phase plane trajectories when the probe displacement and speed are Ω = 0.46, 1.0, 2.0, and 3.0. The trajectories for Ω = 0.46, and 2.0, shown in Figure 2(a) and (c), are quite confusing and irregular and the dynamic behavior is clearly aperiodic. However, for Ω = 1.0 and 3.0, the trajectory is relatively stable and regular, as can be seen in Figure 2(b) and (d), and motion is periodic.
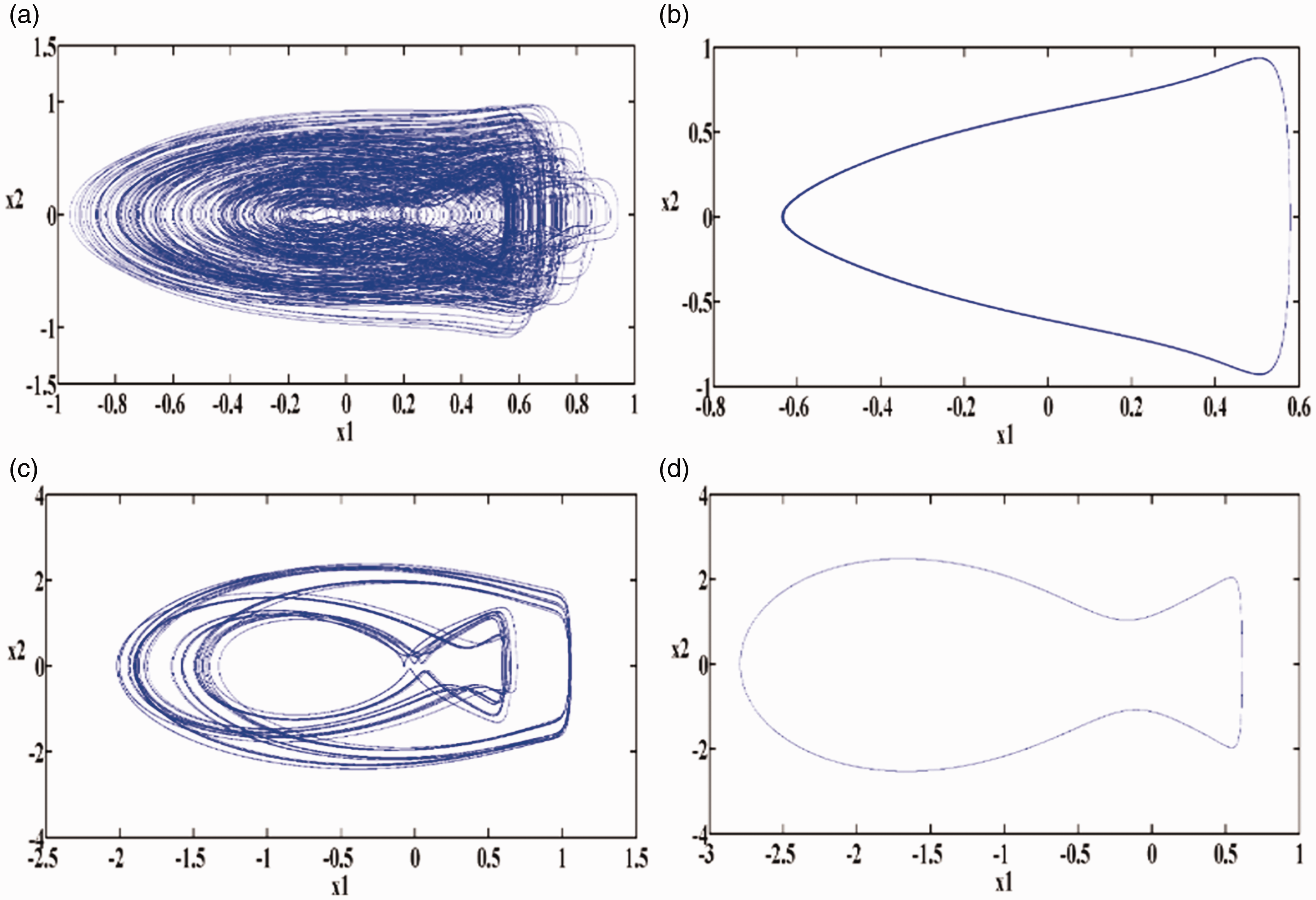
Phase plane trajectory patterns: (a) Ω = 0.46, (b) Ω = 1.0, (c) Ω = 2.0, and (d) Ω = 3.0.
Spectrum analysis
This section presents the findings from the spectrum analyses of probe displacement X1 and speed signals X2. For Ω = 1.0 and 3.0, the spectrum analysis trace shown in Figure 3(b) and (d) shows a velocity and displacement response in which the main frequency appears regularly. The apparent motion of the cycle and the normalized spectrum frequency for Ω = 1.0 has a period of 1T. The Ω = 3.0 spectrum has a period of 3T. For Ω = 0.46 and 2.0, the spectrum is distributed, continuous, and acyclical, as shown in Figure 3(a) and (c).
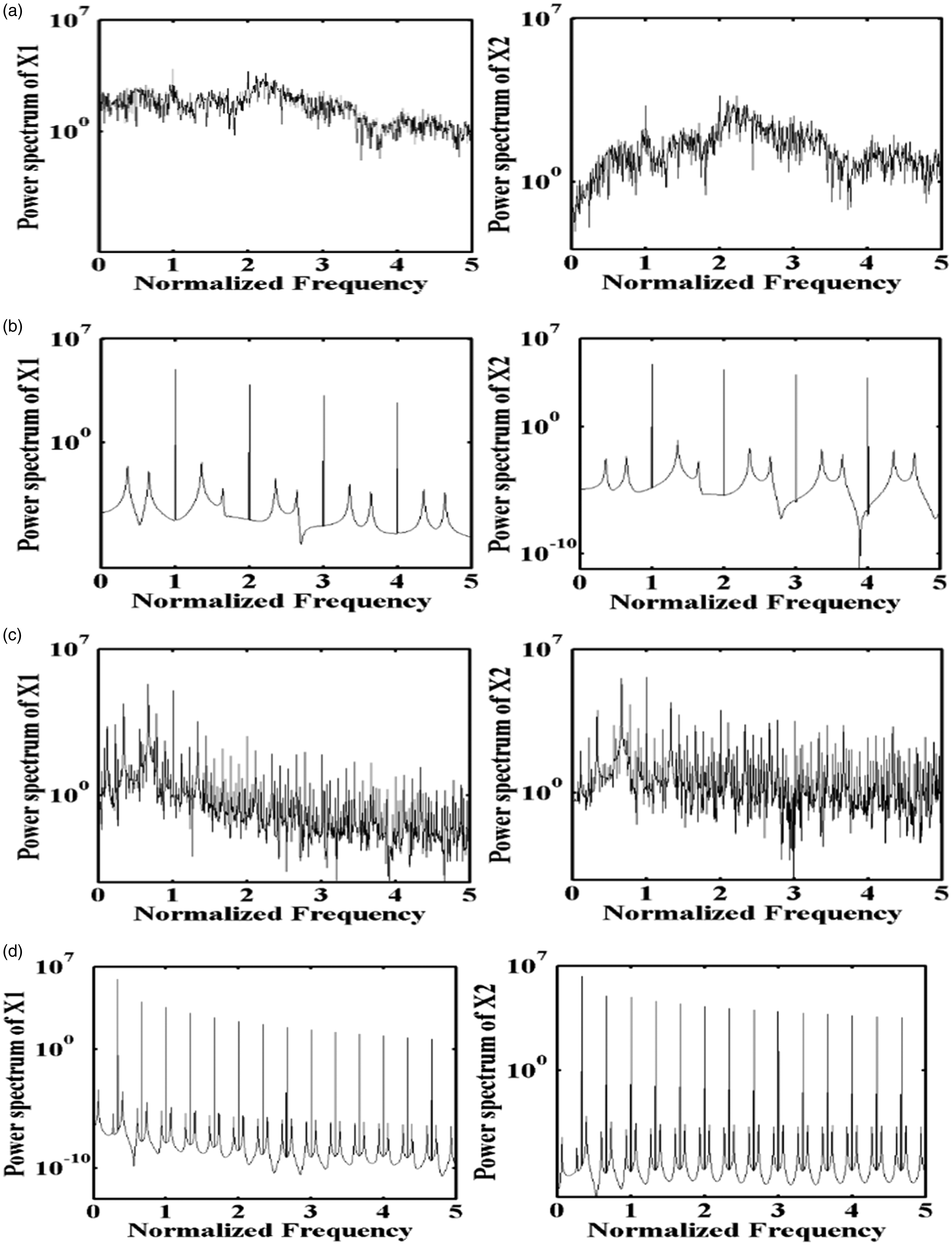
Spectrum analysis of probe tip displacement for (a) Ω = 0.46, (b) Ω = 1.0, (c) Ω = 2.0, and (d) Ω = 3.0.
Bifurcation analysis
Figure 4 shows a bifurcation diagram of the probe tip displacement and probe tip speed. Observation of the changes in dynamic behavior of the excitation frequency Ω shows two bifurcation diagrams having the same motion behavior, such as T, 2T, 3T, multi-cyclical and non-cyclical behavior. To facilitate subsequent analysis, each motion behavior section was compiled in Table 2 and the dynamic behavior was divided into four regions. The intervals of aperiodic behavior are 0.1 ≦ Ω > 0.84, 1.75 ≦ Ω > 2.45, The rest of the intervals are relatively stable and considered cyclical.
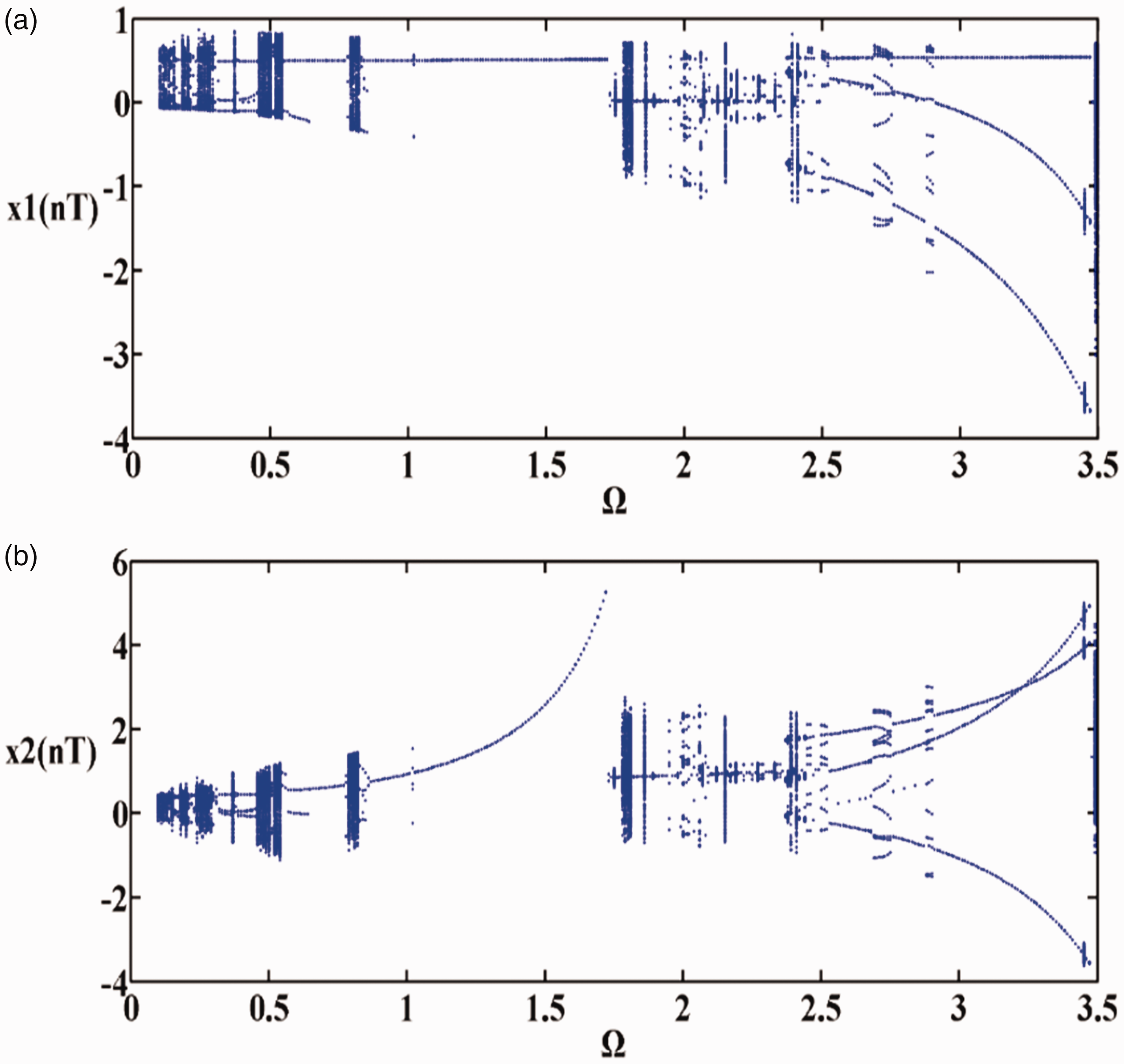
Bifurcation diagrams: (a) probe tip displacement; (b) probe tip speed.
Dynamic interval behavior analysis.

Any one point can be chosen as representative of any one of the four intervals and used as the main object of the analysis. An examination of the preceding phase plane trajectories and spectral analysis results show Ω = 0.46, 1.0, 2.0, and 3.0 to be in compliance with the findings for chaotic behavior and 1T and 3T as cyclic behavior in bifurcation analysis. After this we used the Poincaré cross-section and the maximal Lyapunov exponent to determine if the dynamic behavior was consistent with the bifurcation results.
Different intervals can be seen and are set out in Table 2. The interval 0.84 ≦ Ω > 1.75, a cyclic 1T motion state, is the most stable.
Poincaré section analysis
The dynamic behavior at Ω = 1.0 is as shown in Figure 5(b). Only one point can be seen in this figure, which also corresponds to a bifurcation. So it can be determined that the dynamic behavior of Ω = 1.0 is the 1T period, and so on. Figure 5(d) coincides with period 3T Ω = 3.0. However, at Ω = 0.46 and Ω = 2.0, the dispersion point shows unstable aperiodic behavior, see Figure 5(a) and (c).
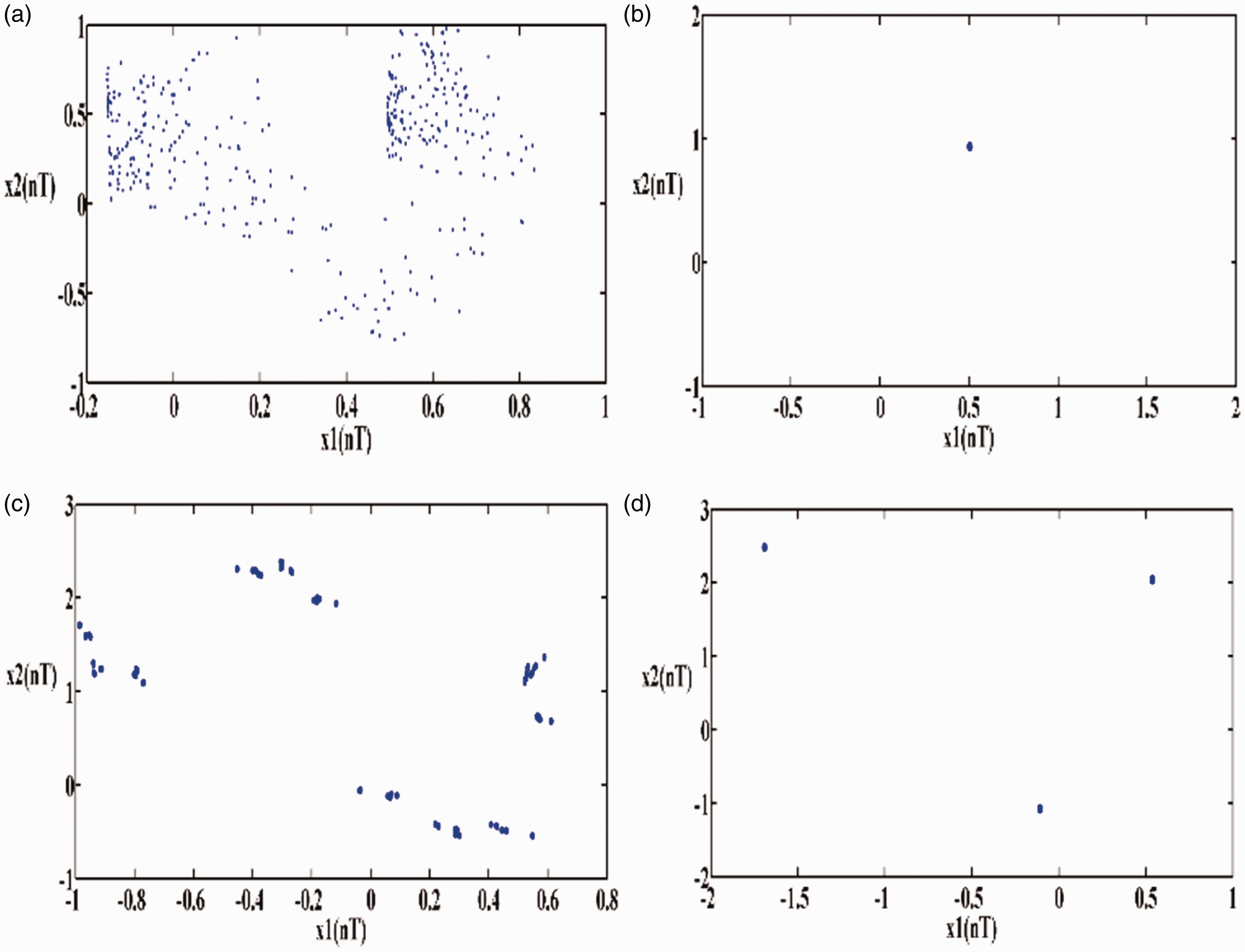
Changes in a sectional view of the probe tip when (a) Ω = 0.46, (b) Ω = 1.0, (c) Ω = 2.0, and (d) Ω = 3.0.
The maximal Lyapunov exponent
The Lyapunov exponent is the most efficient tool for the identification of chaotic behavior. In a quantification system, two infinitely close trajectories in a time series will either converge or diverge at an exponential rate. 20 The existence of chaos in a system can be determined by the use of the maximal Lyapunov exponent. When the exponent is less than zero, two adjacent trajectories will eventually merge into a line and a stable system state is indicated by zero. When the exponent is greater than zero, no matter how small the initial interval between two trajectories, this is an indication that as time progresses behavior will become unpredictable at an exponential rate. This is chaotic behavior.
It is clear that for Ω = 0.46, 1.0, 2.0, 3.0, when the exponent is greater than zero, we can be sure that the dynamic behavior will be chaotic, as shown in Figure 6(a) and (c). However, when the stable exponent value is less than, or close to zero, the dynamic behavior will be non-chaotic, as shown in Figure 6(b) and (d).
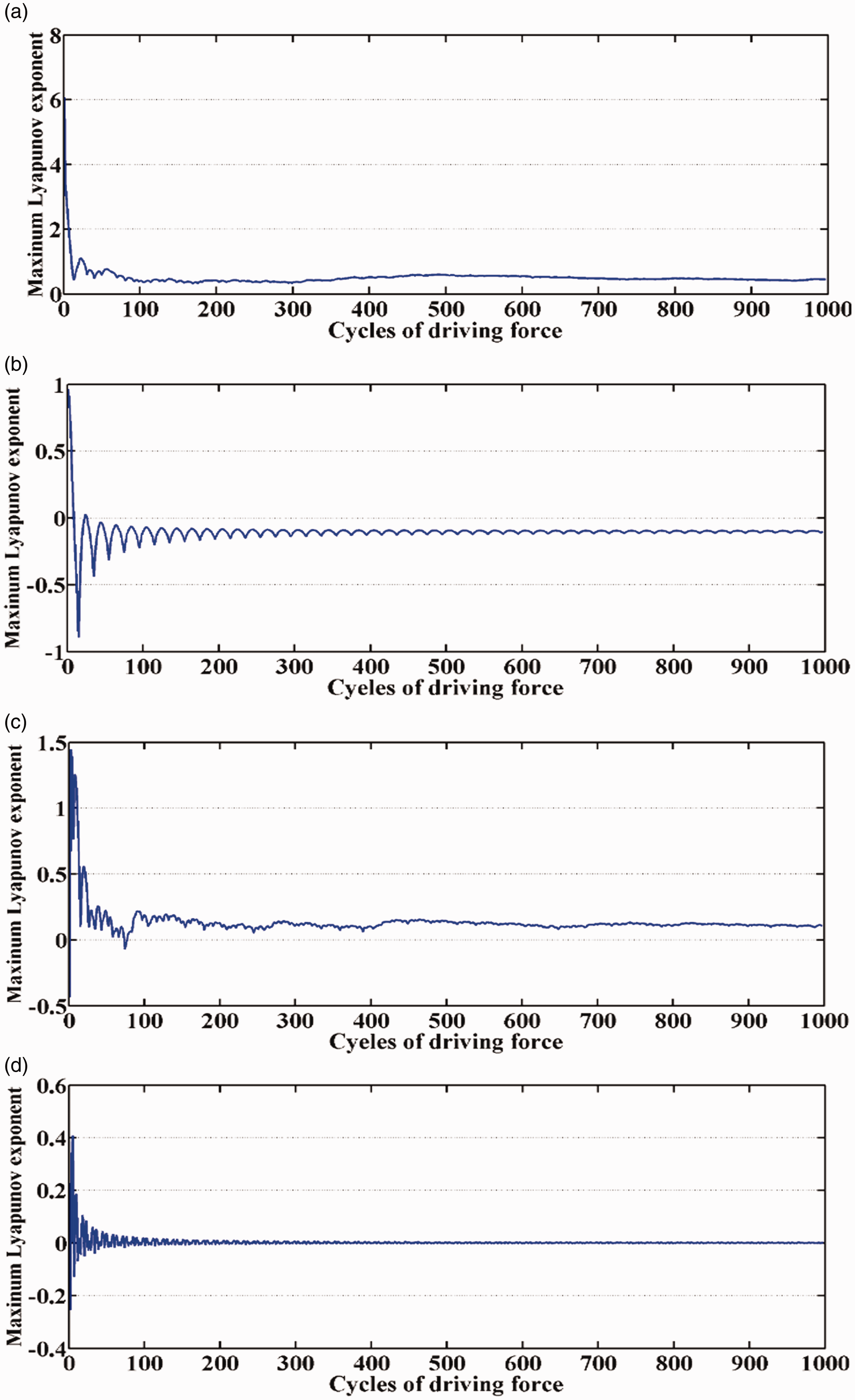
Changes in probe tip maximal Lyapunov exponent for (a) Ω = 0.46, (b) Ω = 1.0, (c) Ω = 2.0, and (d) Ω = 3.0.
Chaos suppression controller
This section describes PD controller design and the fuzzy controller comparison process. Based on dynamic analysis of chaos phenomena in “Dynamic analysis” section, we take excitation frequency Ω = 0.46 as the object for chaos suppression because manual determination of the best controller parameters is quite time-consuming. This section includes an explanation of how PSO and the GA can be used to find, compare, and optimize control parameters Kp and KD. The PSO and GA fitness function is the integral-absolute-error (IAE) for the system dynamic error e(t), which converges on a minimum value as a parameter search performance index, and allows the AFM system output response y(t) to suppress irregular behavior, as shown in the block diagram in Figure 7.
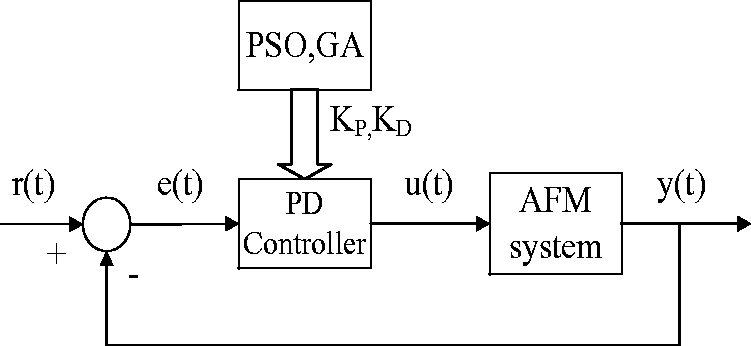
A PSO block diagram for finding the optimal PD control parameters. AFM: atomic force microscope; GA: genetic algorithm; PD: proportional-derivative; PSO: particle swarm optimization.
System mathematical model with PD controller
First, to suppress AFM system chaos, we set the input reference term 

To ensure the dynamic error 
To meet the conditions and find the dynamic error, substitute 

Wherein the control term u(t) is as follows

System response characteristic assessment
The system is searched for optimal parameters using PSO and GA. There is a need for a fitness function to compare the merits and drawbacks of the parameter, so the fitness function used as the basis for assessing the parameters is the IAE of the dynamic error e1. The equation is as follows

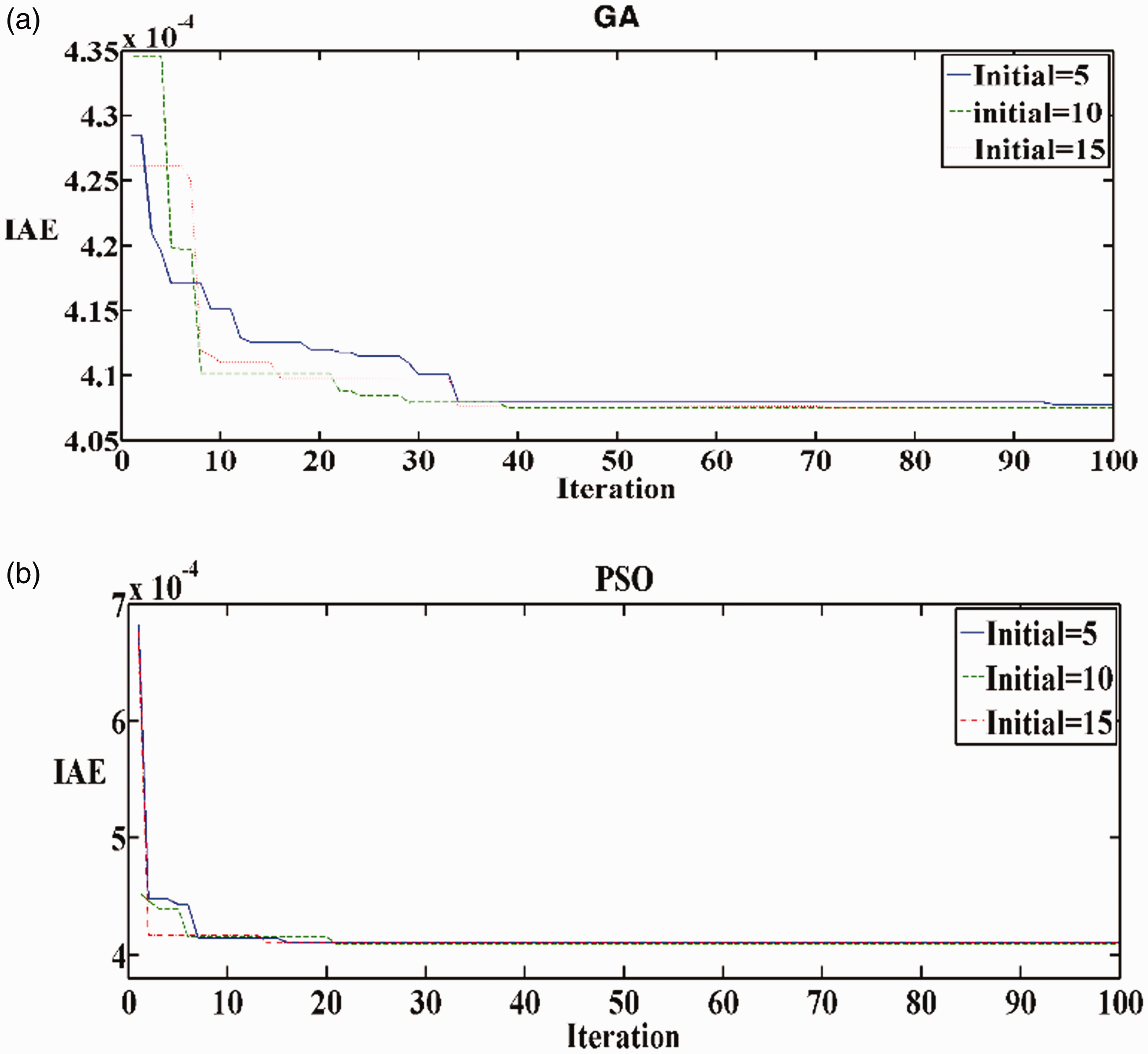
A comparison of the IAE of the two algorithms shows that PSO will converge to stability after 20 to 30 iterations, while GA needs about 40 iterations, or even more, to reach stability. To save time the follow-up parameter searches were mostly done using PSO.
PSO and GA optimization parameters search
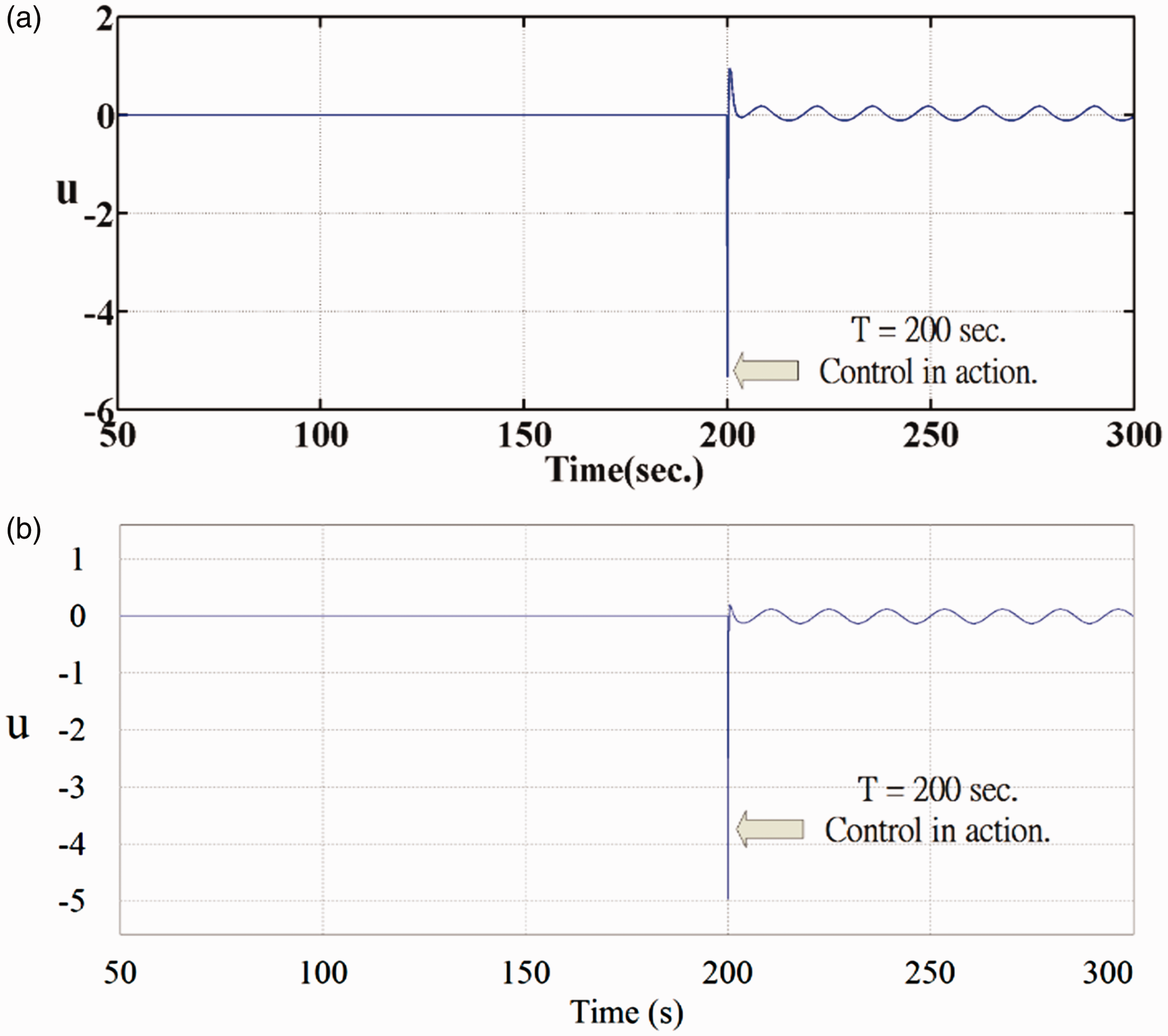
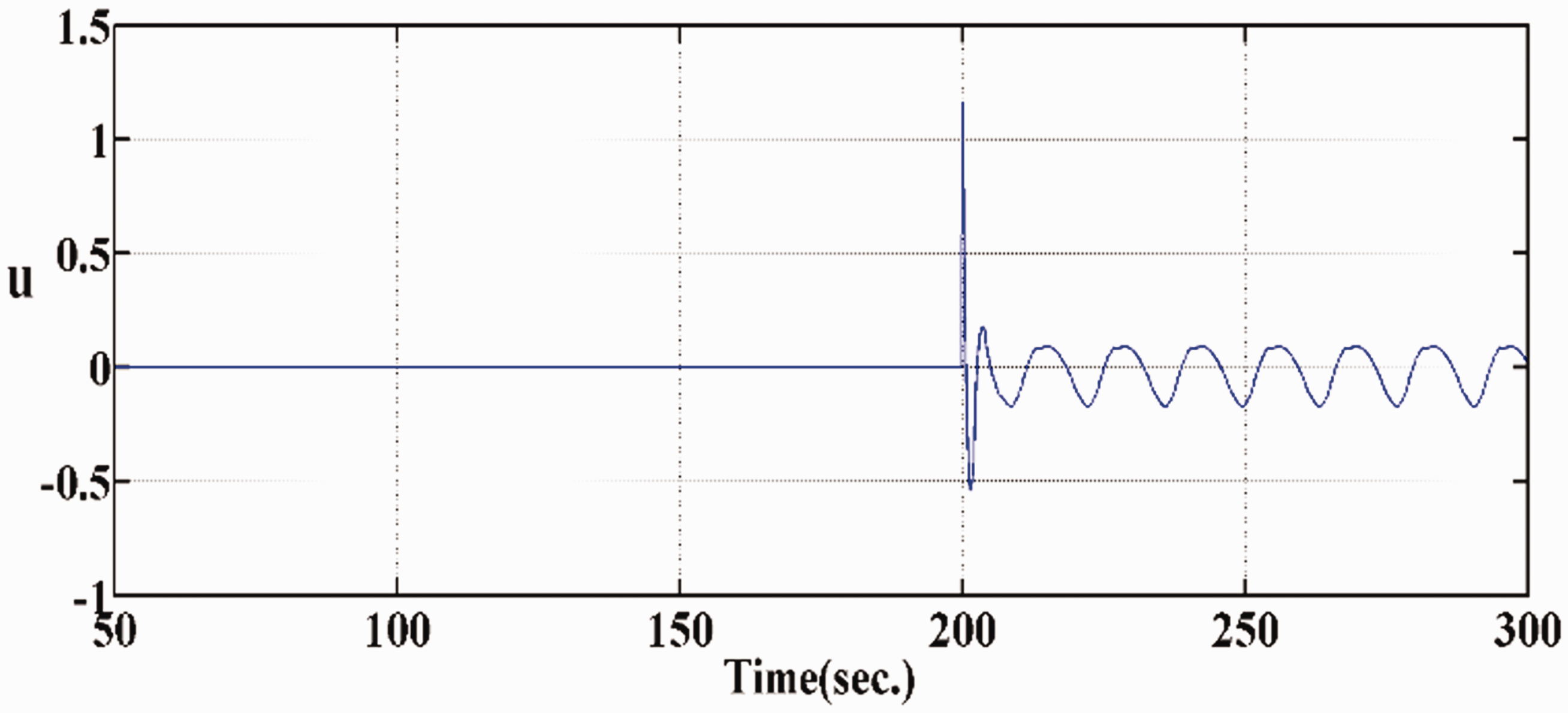
To realize an actual circuit use ±12 V as an actual limit to prevent errors at implementation, then consider the control term u(t) as being limited to 10 or less. To avoid saturation of the hardware circuit, we substituted parameters Kp=19.3641 and KD=19.9467 obtained from Table 3 into the control term resulting from PD control u(t), as shown in Figure 8.
PSO and GA parameters search results.

(a) Matlab/Simulink; (b) Psim circuit simulation control term u time response.
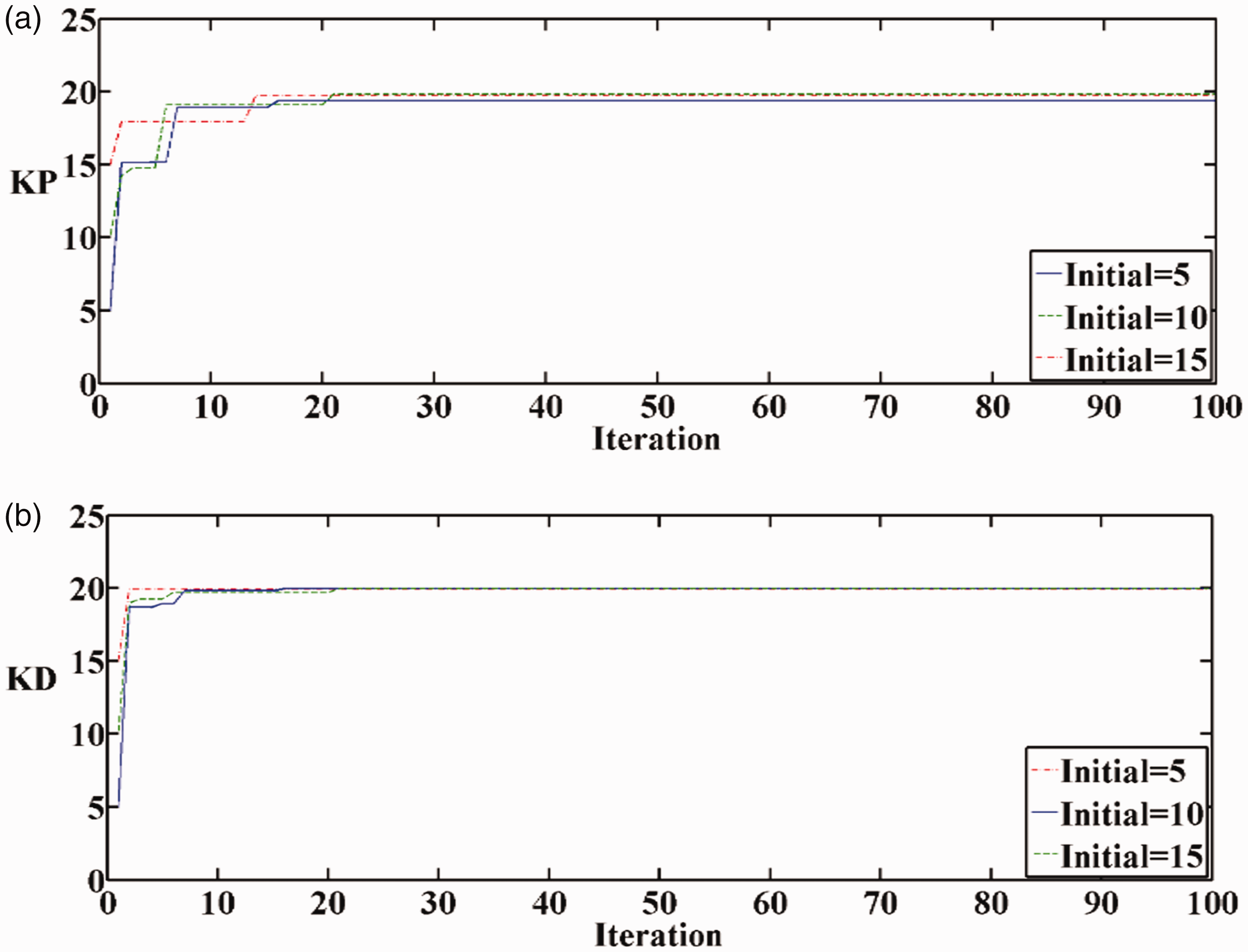
The search range for parameters Kp and KD is limited to 0 to 20, and the initial values for the search for parameters Kp and KD were set to 5, 10, and 15, this proved the robustness of PSO searches as shown in Figure 9(a) and (b). It was found that the best convergence for PSO occurred between 20 and 30 iterations. This corresponds to the IAE of the fitness function in Figure 10(b), which shows consistent results.
(a) Search parameter Kp iteration trace; (b) search parameter KD iteration trace.
Comparison of the IAE fitness function (a) GA and (b) PSO. GA: genetic algorithm; IAE: integral-absolute-error; PSO: particle swarm optimization.
The results showed that even if the initial values are different, those obtained for the AFM system optimal control parameters are very close to each other as can be seen in Table 3.
PD control simulation and experimental results
In this section, the excitation frequency Ω = 0.46 which gives chaotic behavior was chosen as the objective for control. The corresponding chaotic phase plane trajectories are as shown in Figure 2(a). Psim circuit simulation software was used to design an AFM system differential circuit and the Ω = 0.46 chaotic phase flat trajectory is shown in Figure 11(a). The Psim simulation results are consistent with those of the previous dynamic analysis and have the same irregular chaotic trajectory. After control was added at time A on the system phase plane trajectory, the trajectory converged to a point very near zero. This clearly shows that stability was achieved by suppression of chaotic motion as can be seen in the phase plane trajectory trace. Control results are shown on the phase plane trajectory of the system in Figure 11.
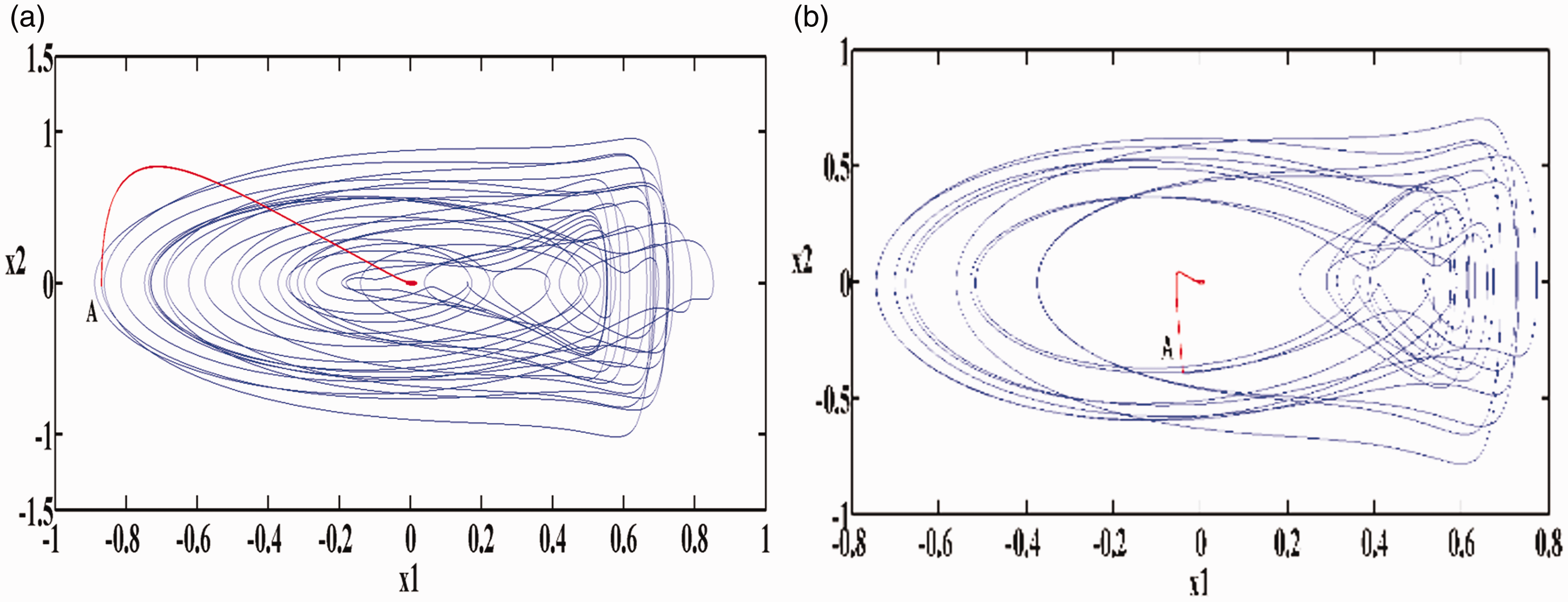
(a) Matlab/Simulink; (b) phase plane trajectories after PD control was added to the Psim circuit simulation.
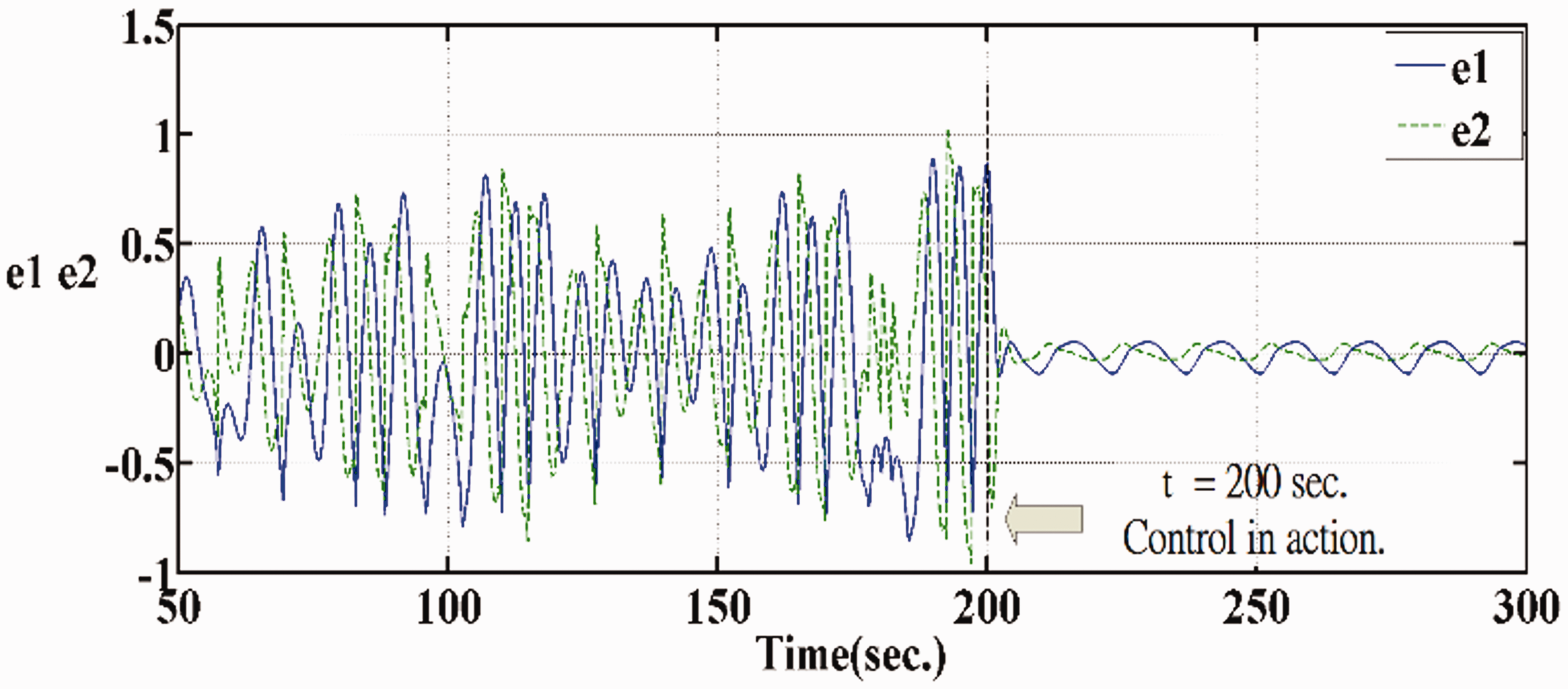
The effect of control can also be observed in the suppression of dynamic errors e1 and e2 in a time response diagram. Figure 12 shows a 300-s long trace of an AFM simulation with chaotic behavior where the value of dynamic errors e1 and e2 fluctuate widely. After 200 s of simulation of chaotic behavior, PD control was started and by second 205 the fluctuations had been suppressed and the system was stable. The effect of control can be clearly seen in Figure 12.
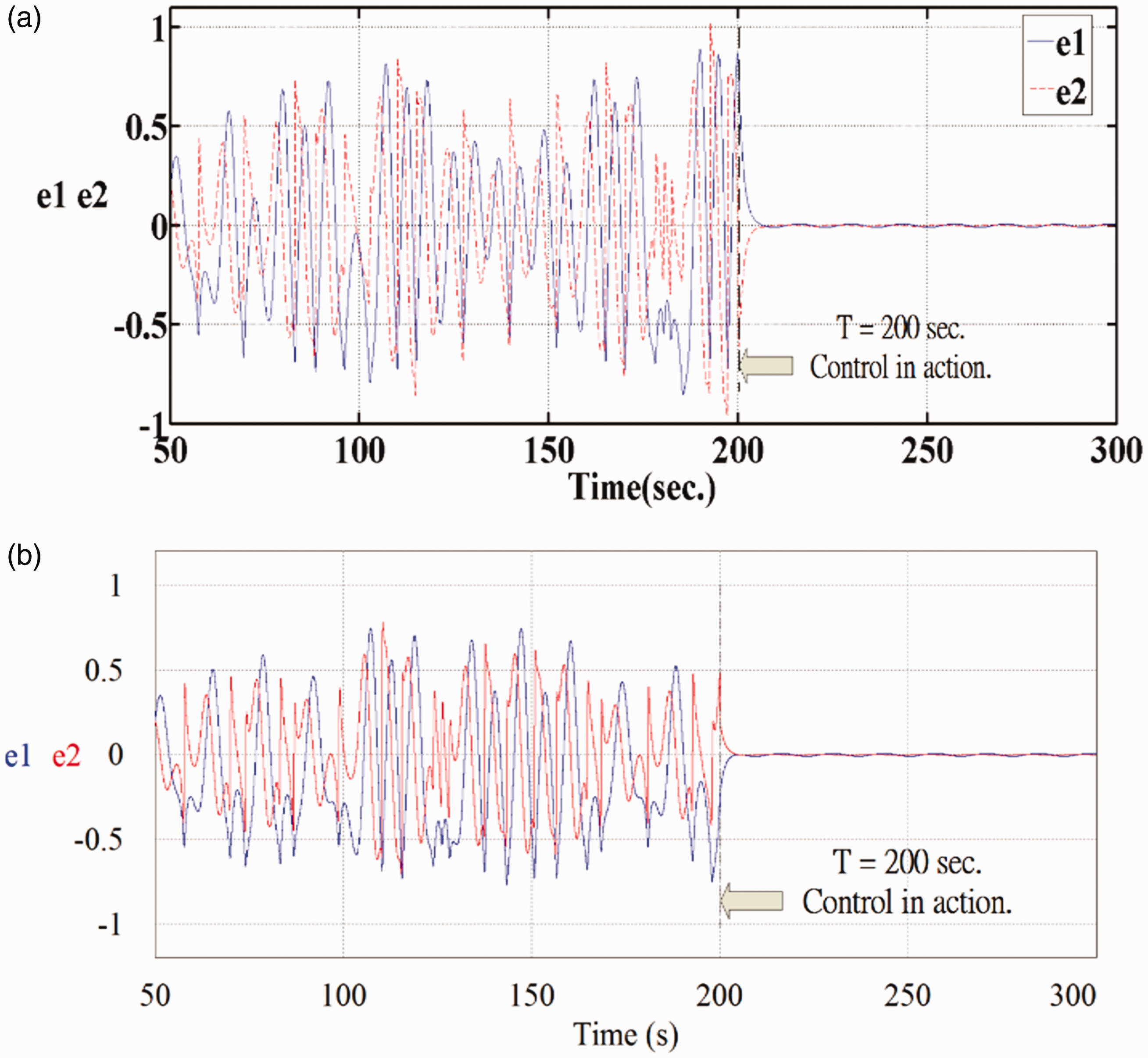
(a) Matlab/Simulink. (b) Time response trace for Psim circuit simulation showing suppression of dynamic errors e1 and e2 by PD control.
Fuzzy controller design
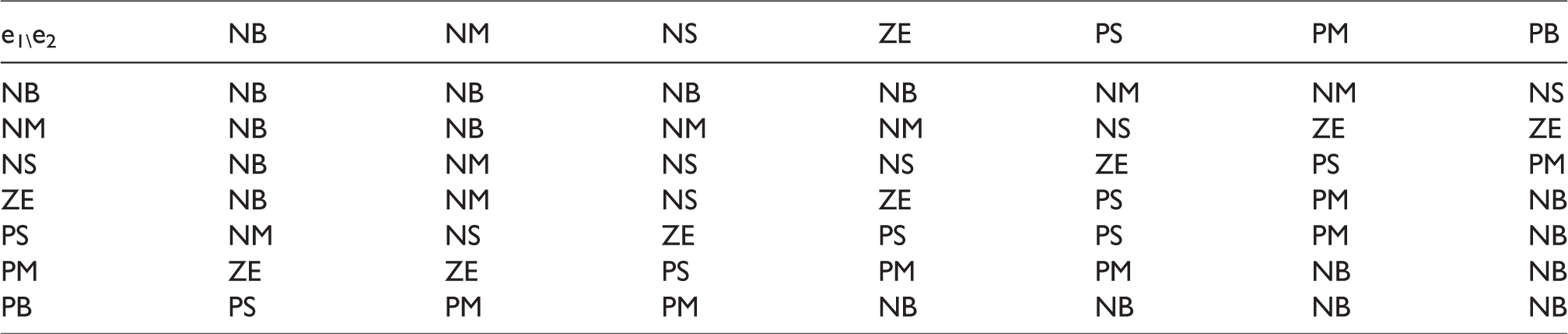
Matlab/Simulink was used to add fuzzy control to an AFM system simulation. The membership function of e1 and e2 was confined to a range between −20 and 20. Table 4 shows the fuzzy control rules which are: negative big (NB), negative medium (NM), negative small (NS), zero (ZE), positive small (PS), positive medium (PM), and positive big (PB).
Fuzzy control rules.
The chaotic behavior at Ω = 0.46 was taken as the object of control and the phase plane trajectory after control has been added is shown in Figure 13. Control is added at time A, the irregular trajectory is suppressed and the trace settles at a point near zero.
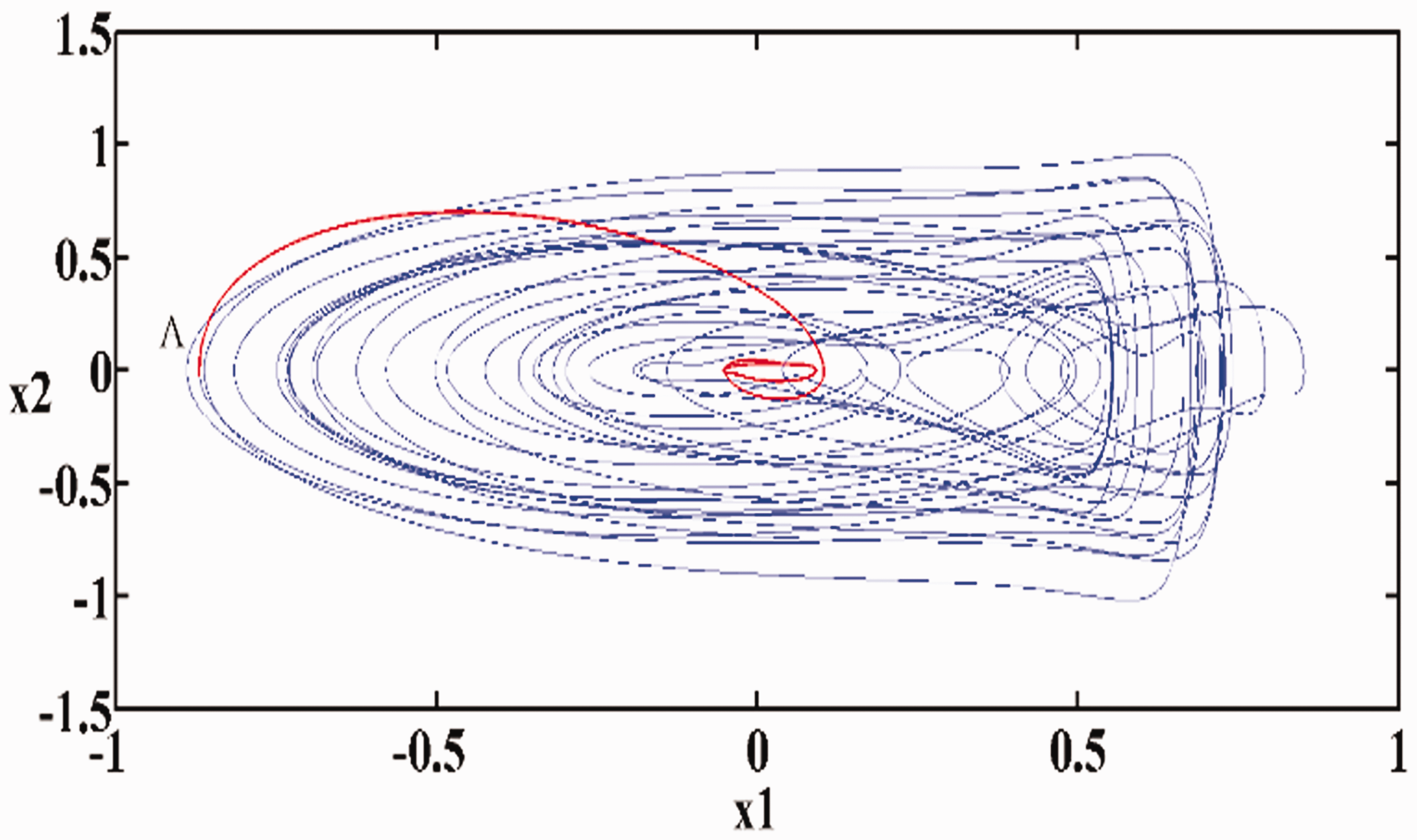
Phase plane trajectories after the addition of fuzzy control.
The dynamic errors e1 and e2 on the time response diagram show the effect of control. Control starts at second 200 and by second 210 stability has been achieved, see Figure 14.
Dynamic errors e1 and e2 time response graph with fuzzy control added.
A comparison of fuzzy control with PD shows PD to have better control, but it has a higher surge, as shown in Figure 15.
Fuzzy control term u time response graph.
AFM system circuit design
We chose circuit simulation excitation frequencies of Ω = 1.0 and Ω = 0.46 to include systems with both periodic and aperiodic behavior. The phase plane trajectory diagram of a Psim simulation of an AFM system is shown in Figure 16(a) and (b). The phenomena are consistent with the dynamic analyses dealt with in “Dynamic analysis” section and it can be clearly seen that different excitation frequencies affect the dynamic behavior of the AFM probe.
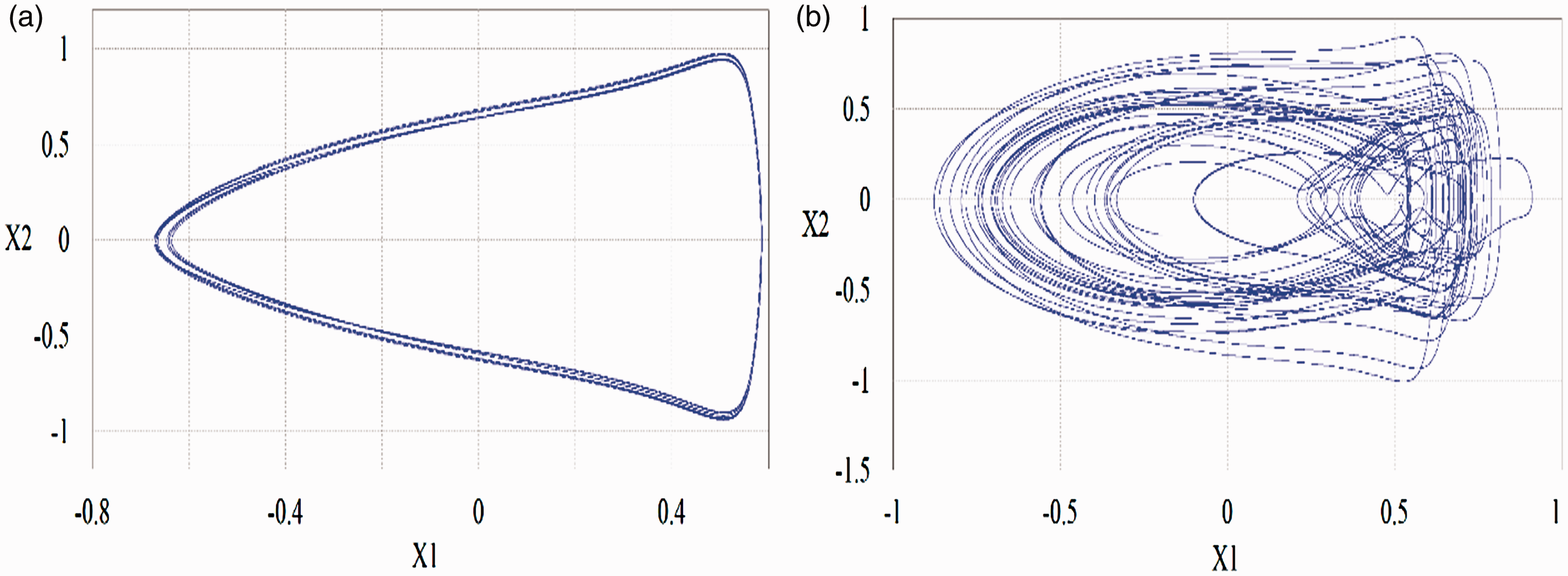
Phase plane trajectory diagrams of the Psim simulation of probe tip (a) Ω = 1.0; (b) Ω = 0.46.
Hardware circuit realization
Observations of the phase plane trajectories generated by an actual hardware circuit, displayed on an oscilloscope, showed similar behavior. Oscilloscope channel 1 was probe displacement X1 and channel 2 was speed X2 (the oscilloscope was in XY mode). Figure 17(a) and (b) is phase plane trajectories traces at the excitation frequencies Ω = 1.0 and Ω = 0.46. These trajectories, showing both periodic and aperiodic behavior, are consistent with the dynamic analysis results.
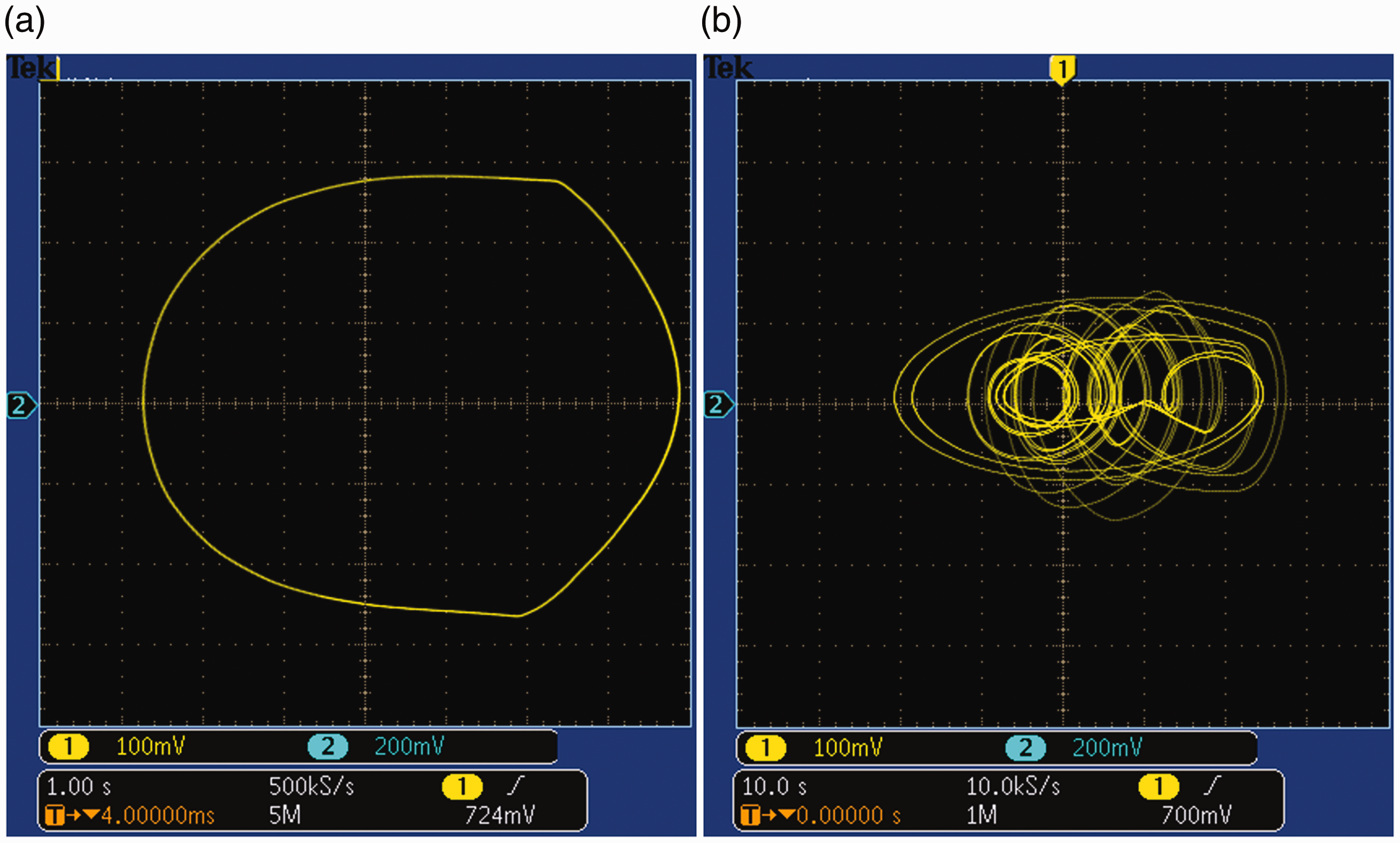
(a) Ω = 1.0; (b) Ω = 0.46 are oscilloscope traces of phase plane trajectories diagrams (X1 and X2) generated by the hardware circuit.
Spectrum analysis and maximal Lyapunov exponent analysis were carried out on data captured by the oscilloscope for use in dynamic analysis. By validation of these tools, it can be shown that the phenomena generated by hardware circuits are in line with what we call periodic and aperiodic behavior, as shown in Figures 18 and 19. The results obtained from the two different analysis tools are consistent and explain why differences in excitation frequency can cause chaotic behavior in an AFM system.
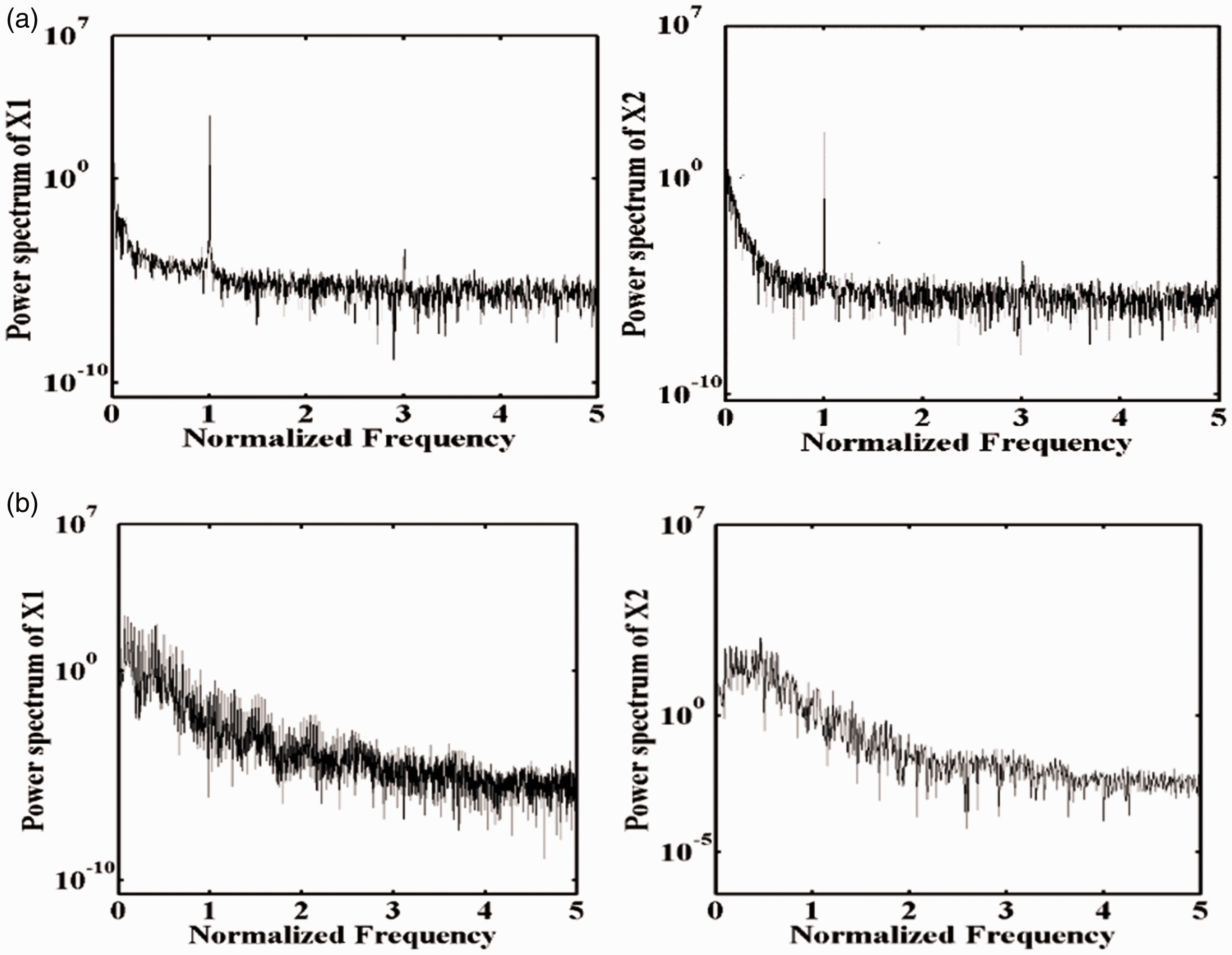
(a) Ω = 1.0 and (b) Ω = 0.46 are the spectral analysis diagrams for the hardware circuit X1 and X2.
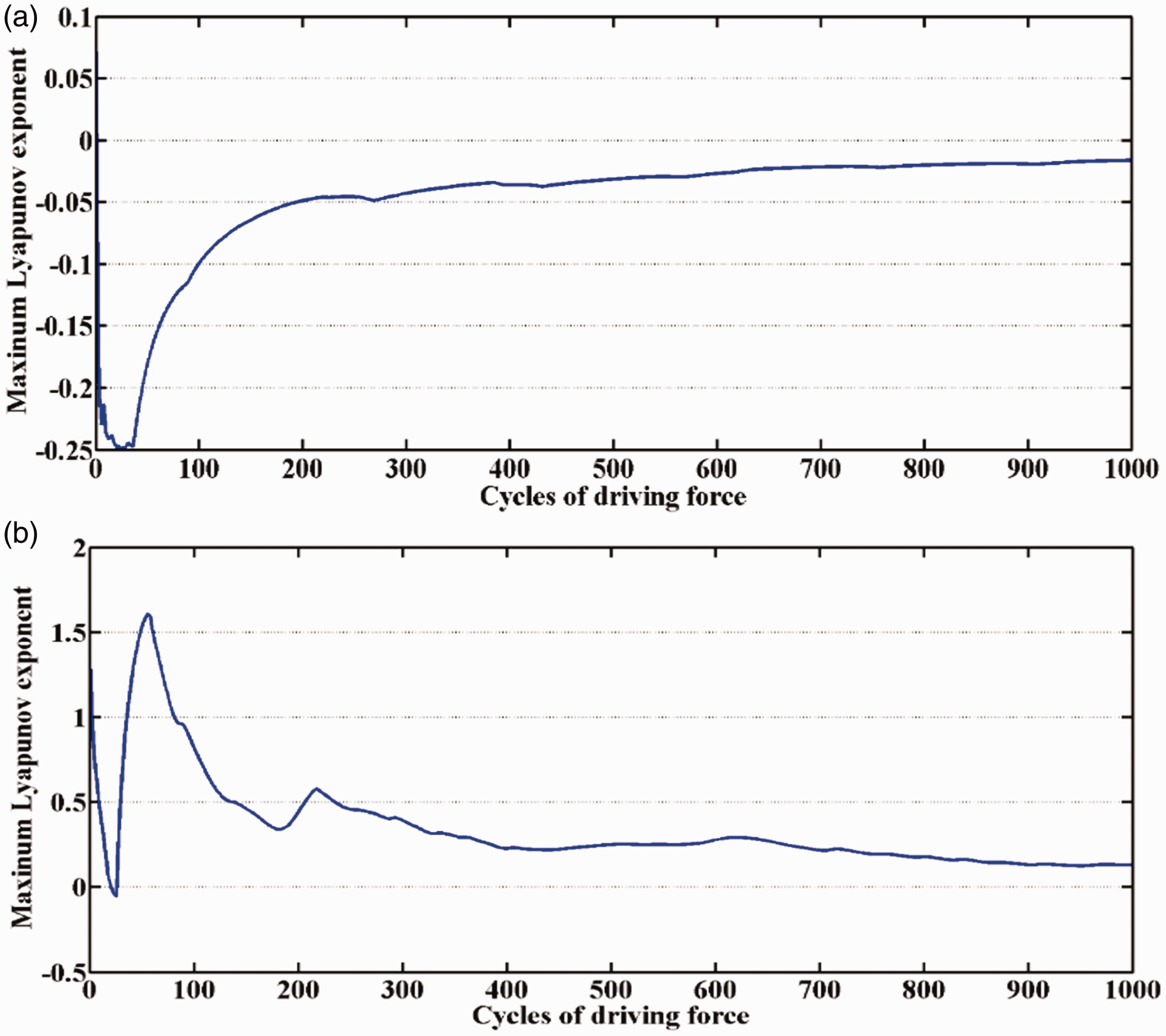
The maximal Lyapunov exponent for the hardware circuit X1 and X2. (a) Ω = 1.0 (b) Ω = 0.46.
Experimental results for the hardware circuit with added PD control
The validation of these tools shows that with the same parameters an AFM hardware circuit will exhibit the same chaotic behavior as a simulation. Therefore, to suppress chaotic behavior in the circuit, we add a hardware PD controller. The control parameters Kp and KD are fine-tuned by precision variable resistors in the circuit in accordance with controller design and the parameter search results in the previous section. The effects of control can be observed in the dynamic error e1 and e2 time response curve, shown in Figure 20. Channel 1 and channel 2 are dynamic errors e1 and e2, respectively. Control can be added at any time after the waveform reaches a steady state. The waveforms e1 and e2 become stable at 0 V within about 5 s.
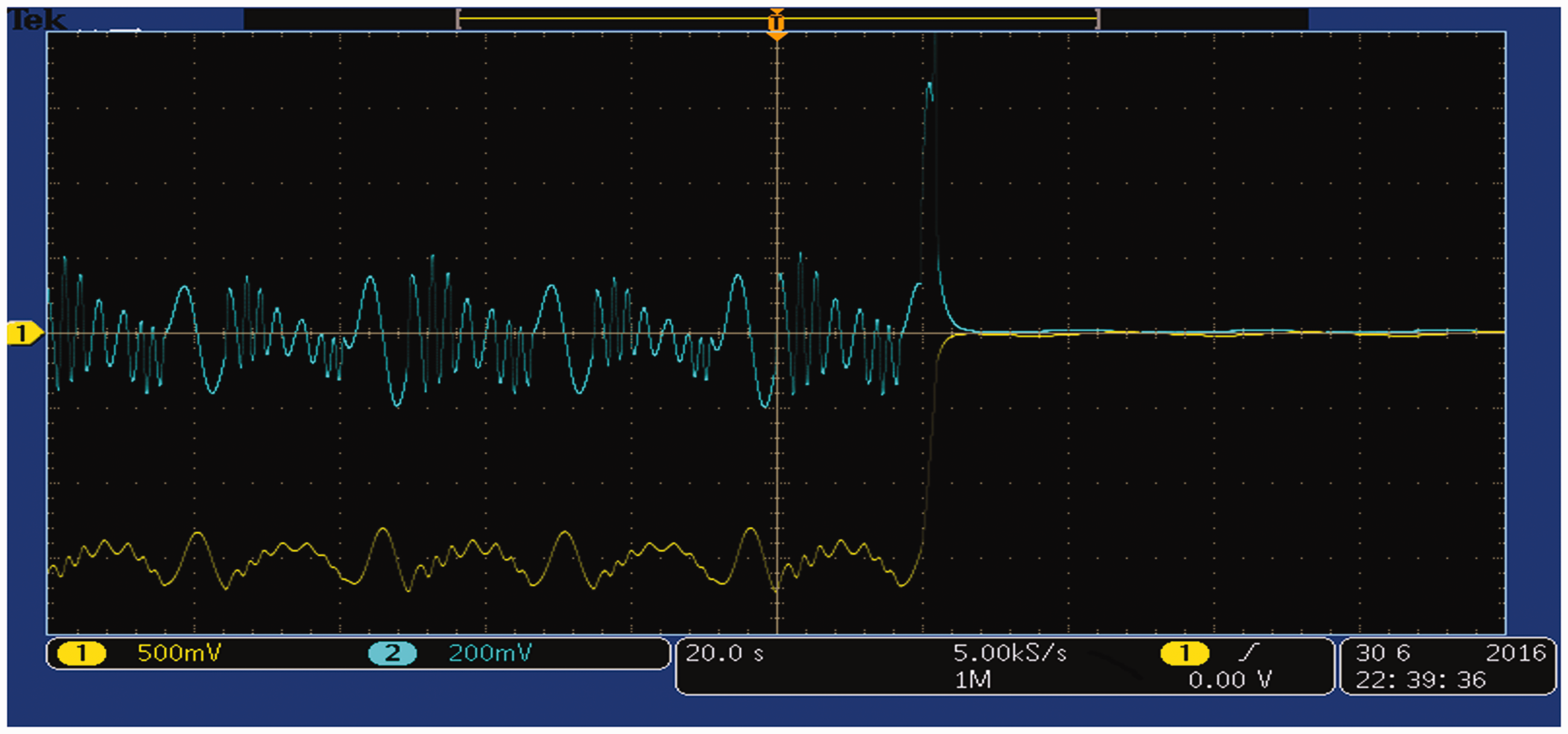
The time response curve after PD control has been added.
It was mentioned earlier that the control term u might cause operating voltage saturation if the control parameters Kp and KD were excessive. Using Kp=19.3641 and KD=19.6467 control was added at any time, resulting in the control u time response waveform shown in Figure 21. At the instant when control was added a surge voltage of about −10 V was observed, which was within the expected range.
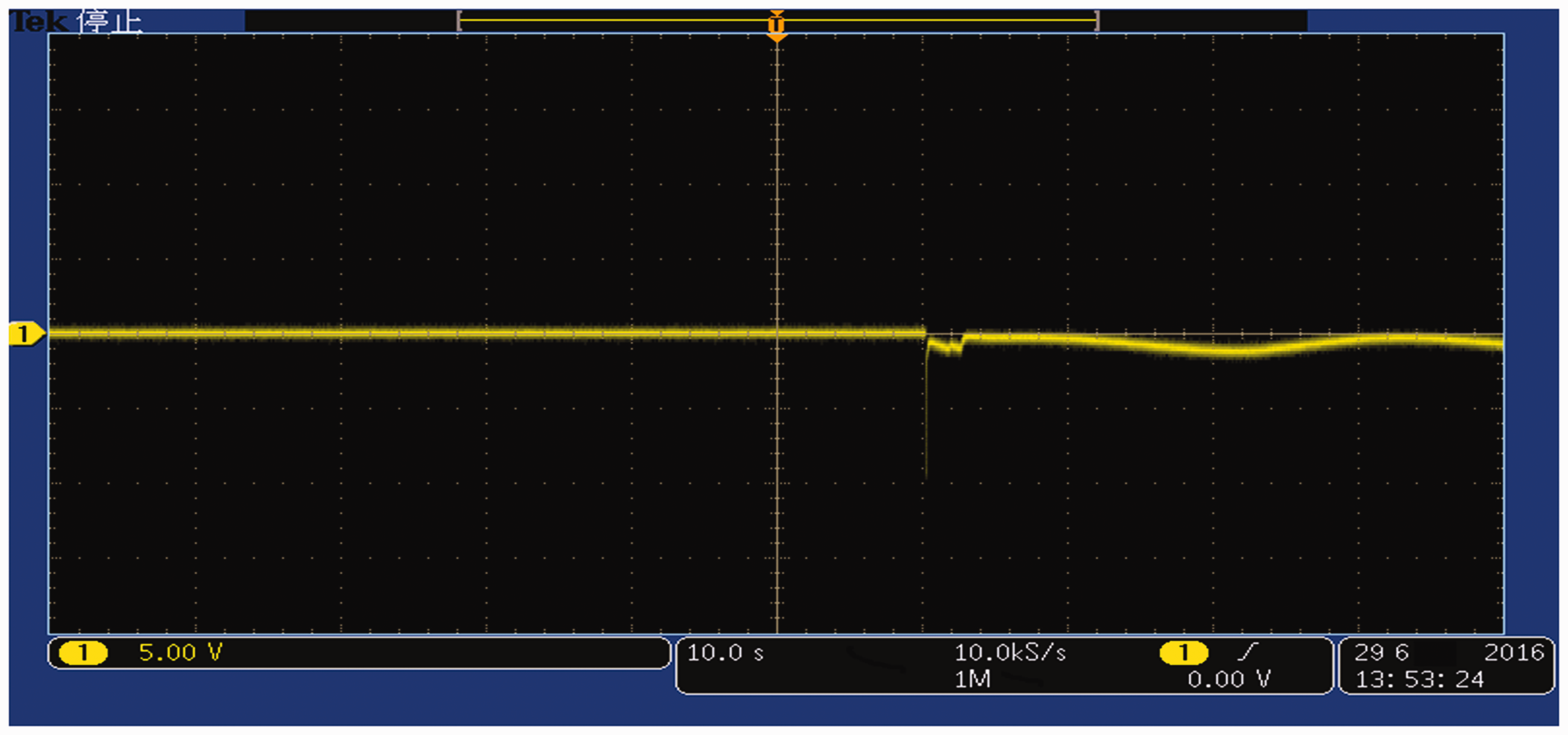
Hardware circuit PD control u time response curve.
Hardware circuit experimental results after the addition of fuzzy control
The computer terminal binding Matlab/Simulink to the real-time interface (RTI) was used in the design of the fuzzy controller. The hardware circuit waveform signal from the AFM system was transferred by the ADC via a CLP1104 signal connector to a computer terminal that used dSPACE control. The effects of control were observed on an oscilloscope, see Figure 22. Channels 1 and 2 show waveform traces of the dynamic errors e1 and e2, respectively. The waveforms stabilized at around 0 V within about 10 s after control was applied, as shown in Figure 22(a).
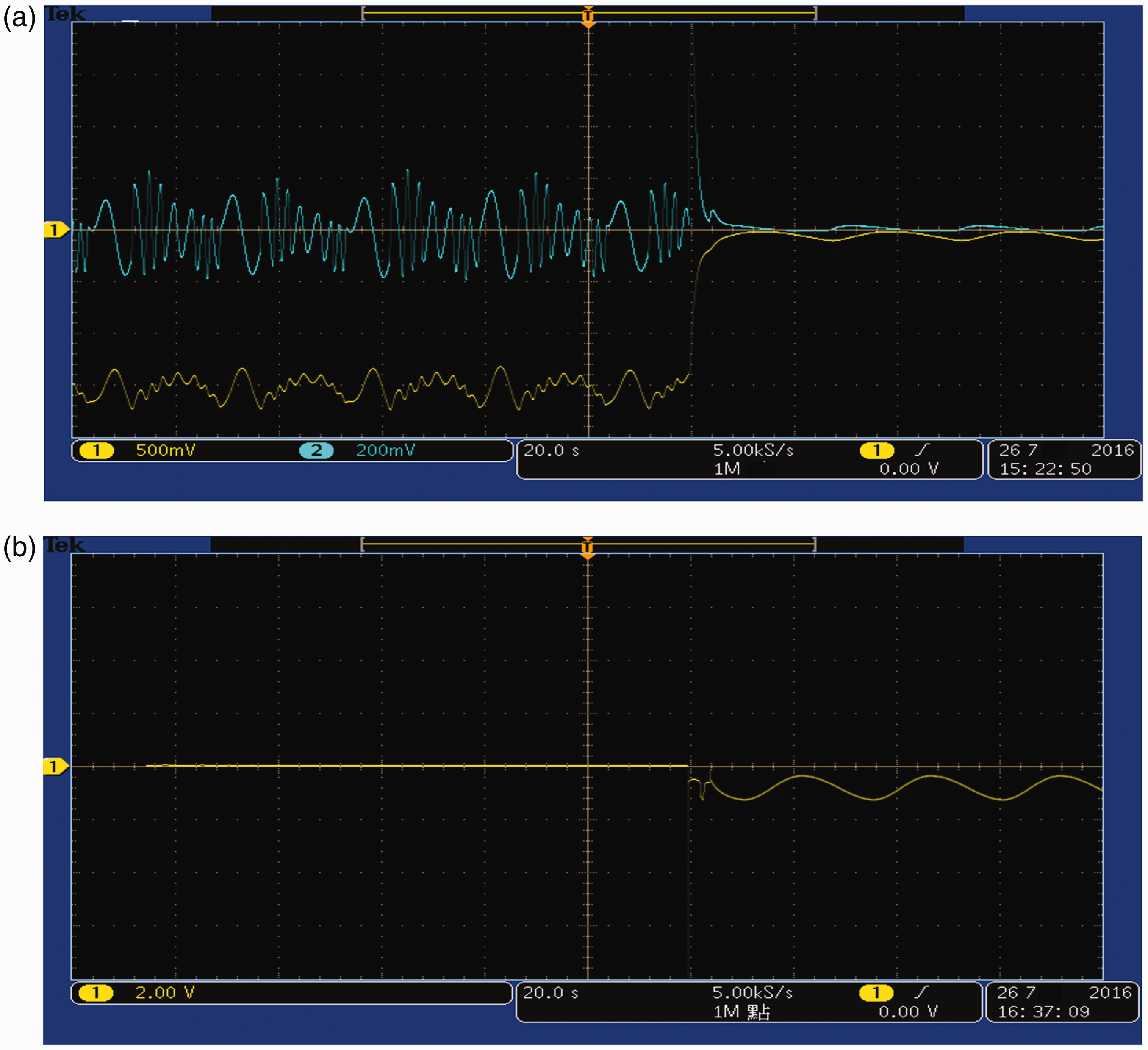
(a) e1 and e2 time response graph after fuzzy control is added to the hardware circuit; (b) fuzzy control u time response graph.
The fuzzy controller had a voltage surge of about −4 V which was smaller than that of the PD controller. After stabilization the waveform amplitude variations were not only larger, but also stable at around 0 V, as shown in Figure 22(b).
Conclusions
In this study the nonlinear behavior of an AFM caused by changes in excitation frequency was investigated. Numerical analysis showed that the tools used for analysis gave consistent results and changes of excitation frequency have significant effect on behavior of the system. The nonlinear behavior of the system caused by different excitation frequency was set out in a table that clearly shows the difference between periodic and aperiodic behavior. The results can be used as a guideline or future reference to determine AFM system adjustment parameters and to improve system measurement accuracy especially where the chaotic motion occurs in two specific intervals.
To control the chaos efficiently, a chaos suppression controller was developed and PSO and the GA were used to find, compare, and optimize the control parameters. The PSO and GA fitness function was the IAE, converging on a minimum value, used as a parameter search performance index. This allowed the AFM system to successfully suppress irregular chaotic behavior.
The Psim circuit simulation results were applied to verify the numerical analysis results. It was found that these two results were identical and correct. This confirmed that the chaotic behavior in the hardware system was the same as in the simulation. The PD and fuzzy control were both implemented in an AFM system and the results were compared. It was found that the control established by both Matlab/Simulink and Psim circuit simulations could inhibit chaotic behavior efficiently. Verification of the results of numerical analysis and Psim circuit simulation was made in actual physical AFM hardware circuitry where both periodic and aperiodic phenomena were observed. The hardware implementation of PD and fuzzy control not only readily suppressed irregular trajectory traces but also confirmed the validity of the PSO parameter search procedure. The hardware circuit design and controller proposed in this paper efficiently suppressed chaotic behavior and can be applied to real AFM systems.
Footnotes
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: the Ministry of Science and Technology of the ROC, under projects No. 106-2221-E-167-012-MY2, 106-2218-E-167-001 & 106-2622-E-167-010-CC3.