
Abstract
Rubber or elastomeric materials are widely used for shock absorbers having elastic and viscous properties such as high inherent damping, deflection capacity, and energy storage. The dynamic properties of these components are of primary concern in designing rubber absorbers to reduce the shock loading given as well as the structure-borne noise transmissibility. Besides, the dynamic response of the mechanical systems, at where the rubber shock absorbers are used, is directly associated with the properties of the shock absorbers. In order to determine these properties of the rubber, mathematical models are created in terms of hyperelasticity and viscoelasticity. The hyperelastic and viscoelastic material models represent the nonlinear elastic and strain rate dependencies of the overall rubber behavior, respectively. Hyperelastic material model captures the material’s nonlinear elasticity with no-time dependence whereas viscoelastic model describes the material response which contains an elastic and viscous part depending on time, frequency, and temperature. This paper presents the dynamic characterization of rubber shock absorbers, having different shore hardness values, in terms of hyperelastic and viscoelastic constitutive models. The parameters of the constitutive models are determined from the uniaxial tensile and relaxation tests. These parameters are used for the numerical model of the rubber components and the accuracy of the characterization is presented by means of a numerical case study.
Introduction
Rubber has a distinctive behavior with regard to the response to mechanical deformation when compared to other materials. It has the ability to deform significantly by tension, compression, or torsion and then return to almost its original shape upon release. For instance, natural rubber can be elongated up to 1000%. In addition to elastic properties, rubber has energy absorbing properties of a viscous liquid. The combination of viscous and elastic properties makes the rubber a unique material. In accordance with these unique properties, rubber is commonly used as shock and vibration absorber having elastic and viscous properties such as high inherent damping, deflection capacity, and energy storage. Due to the elastic properties, rubber store and return most of the input shock or vibrational energy resulting in reduction of the transmissibility. On the other hand, rubber attenuates the low frequency vibrations because of the viscous damping properties.
The dynamic properties of the rubber are of primary concern in designing rubber isolators to reduce transmissibility. Several studies have been conducted to characterize the rubber’s mechanical properties. Lin et al. 1 presented a simple experimental method to evaluate the frequency-dependent stiffness and damping characteristics of a rubber mount. This experimental method involves measuring complex FRF by an impact test and curve fitting the data obtained from the test. Vriend and Kren 2 used dynamic indentation tests in order to determine the viscoelastic properties of rubber components. The results were compared for rubbers with different shore hardness and a semiempirical relationship between hardness and the rigidity was derived. Lu et al. 3 conducted experiments with a rubber mount and developed a nonlinear finite element method (FEM) model to investigate its large deformation behavior and compared the model and experimental results to validate their approach. Valente and Molnar 4 compared Mooney–Rivlin and Neo-Hooken hyperelastic material models for silicone rubber using Marc Mentat FEM software. Dikmen and Basdogan 5 investigated the material properties of a rubber vehicle door seal by means of experimental and numerical studies. Dagang et al. 6 analyzed the vibration characteristics of a pneumatic artificial muscle damping seat composed of a rubber inner tube and a mesh shell. They obtained the vibration characteristics of this muscle seat by using Matlab/Simulink toolbox. In another study, the dynamic characteristics of a compact vibration isolator with quasi-zero stiffness had been calculated and experimental studies were carried out. 7
Previous studies generally focused on either hyperelastic or viscoelastic properties of the rubber without considering shore hardness values. In this study, the dynamic characterization of rubber shock absorbers, having different shore hardness values, is investigated in terms of hyperelastic and viscoelastic constitutive models by performing a comprehensive case study. The parameters of the constitutive models are determined from the uniaxial tensile and relaxation tests. These parameters are used for the numerical model of the rubber components and the accuracy of the characterization is presented by means of a numerical case study. Moreover, the empirical relationships between shore hardness and modulus are investigated by means of comparing the calculated results with the measured ones. This paper is organized as follows: The next section focuses on the theory of rubber. In “Case study” section, the case study mentioned above is presented and finally, the paper is concluded with a summary and conclusion.
Theory of rubber
Rubber can be defined in terms of hyperelasticity and viscoelasticity. The hyperelastic and viscoelastic material models represent the nonlinear elastic and strain-rate dependencies of the rubber behavior, respectively. Hyperelastic material model captures the material’s nonlinear elasticity with no time dependence whereas viscoelastic model describes the material response which contains an elastic and viscous part depending on time, frequency, and temperature. The viscoelastic properties of rubber allow the rubber shock absorber to gain the original shape after the high deformation while absorbing the shock energy.
Hyperelastic constitutive model
Hyperelasticity is associated with the materials which can reveal large elastic strain that is recoverable. Most elastomers, such as rubber and many polymer materials, are categorized in this category. A hyperelastic material can also be defined as an elastic material which means that the material returns to its original shape once the force is released. The difference is that for a hyperelastic material, the stress–strain relationship is related to a strain energy density function, W and the model describes the nonlinear relationship between the stress and strain unlike that of the elastic material, as stated in equation (1)
8

The strain occurred on a deformed rubber material is defined as

Strain invariants are basically used to measure the strains which are independent of the coordinate system used to measure the strains.
5
Thus, the following three strain invariants include the three stretch ratios



Constitutive hyperelastic material models.

Viscoelastic rheological model
As discussed before, hyperelastic model represents the nonlinear elastic response with no time dependence. In order to model the time dependency of the rubber behavior, a viscoelastic rheological model must be employed. Two major types of experiments can be performed for viscoelastic modeling: transient and dynamic. In dynamic experiments, so-called dynamic mechanical analysis, the stress or strain is varied sinusoidally with time and the response is measured at various different frequencies.
9
On the other hand, transient experiments comprise of deforming the material by simple elongation and monitoring the response with time.
13
These experiments are mainly composed of creep and relaxation tests. In a creep test, the stress is held constant and the strain increases with time whereas in a relaxation test, the strain is held constant and the stress decreases with time.14–16 One of the basic rheological viscoelastic models which can anticipate relaxation behavior is Maxwell model which includes both elastic and viscous property of the material and consists of a linear ideally viscous Newtonian dashpot and linear elastic Hookean spring in series, as shown in Figure 1. This model can presume relaxation behavior and is generally applied for the small deformations.14,15 Since the elements are connected to each other in series, the stress on each element is the same and equal to the imposed stress, while the total strain is the sum of the strain, as stated in equation (6).
Maxwell model.


Integrating equation (7), the stress is obtained as a function of time

Advanced form of this model, which is called Generalized Maxwell Model considers that the relaxation does not take place at a single time but during a series of times.
18
Thus, it has many spring-dashpot Maxwell elements. Prony series is one of the best functions for modeling the linear viscoelasticity and generalized Maxwell model. The resulting stress versus time data from a tensile relaxation test can be fitted with Prony series as seen in equation (9)
19

Shore hardness
Hardness is a measure of an elastomer’s response to a small surface stress. In the 1920s Albert F. Shore defined a hardness scale and developed a measurement device, called durometer, to measure the shore hardness of the elastomers. The term durometer is often used for the measurement as well as the instrument itself. 20
Shore hardness is an indirect measure of Young’s modulus and related moduli of an elastomeric or rubber material. 21 Higher hardness indicates harder rubber compound. Softer compounds stretch more and fasten better on rough surfaces compared to harder ones. Moreover, softer rubber materials creep more and have a lower tensile strength than that of harder material. On the other hand, harder compounds pose greater abrasion resistance and resistance to extrusion. Consequently, rubber shore hardness is an important property and should be properly selected according to the application. Rubbers used in vibration and shock isolators generally fall in the range of 35–75 durometer on the Shore A scale.
Since shore hardness is an indirect measure of the stiffness, it can be directly related to Young’s modulus. One of the study on this relationship was performed by Gent.
22
He derived a semiempirical equation, as follows


Battermann and Köhler
24
derived an empirical formula which defines the relationship between the shear modulus, G and the shore hardness

Case study
The rubber shock absorbers used in this case study are made of natural rubber with different shore hardness values, 45, 60, and 75 A. In the first part of the study, the rubber properties of the shock absorbers were determined in terms of hyperelasticity and viscoelasticity. Then, the empirical formulas, mentioned in “Shore hardness” section, were evaluated by comparing the calculated modulus with the measured ones. In the last part of the case study, rubber characterization was validated by a numerical study based on the Shore 75 A rubber shock absorber.
Evaluation of rubber properties
In order to evaluate the dynamic properties of the rubber, uniaxial tensile and relaxation test were conducted on the specimens created according to DIN 53504-S1 with a thickness of 2 mm as seen in Figure 2. For each type of rubber, identical three specimens were used for all specified tests. Universal tensile test machine, the product of Zwick Roell, is shown in Figure 3. It was used for the tensile and relaxation tests of the rubber specimen.
(a) Shock absorber and (b) rubber specimen. Universal tensile test machine.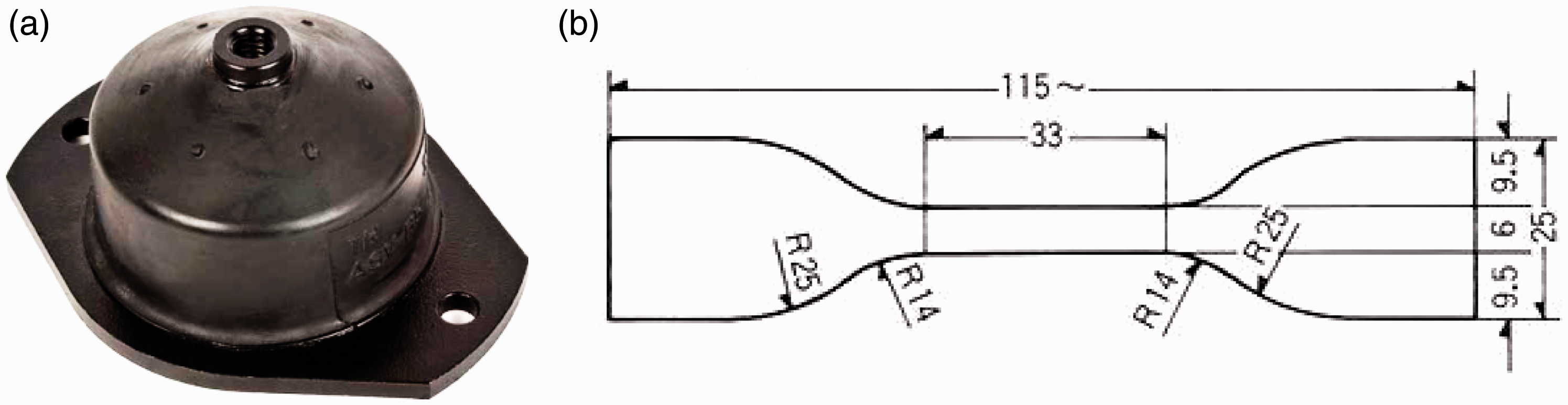

All tests were performed at constant room temperature under strain control. To study the hyperelastic properties, specimens were subjected to quasi static uniaxial tensile loading with constant 25 mm/min strain rate and three cycles of experiment were conducted to minimize the experimental errors. Figure 4 presents the stress–strain responses as obtained from the quasi static test and estimated coefficients of hyperelastic models are tabulated for shore 75 A natural rubber in Table 2.
Stress–strain responses from uniaxial tensile test. Estimated hyperelastic coefficients of shore 75 A natural rubber.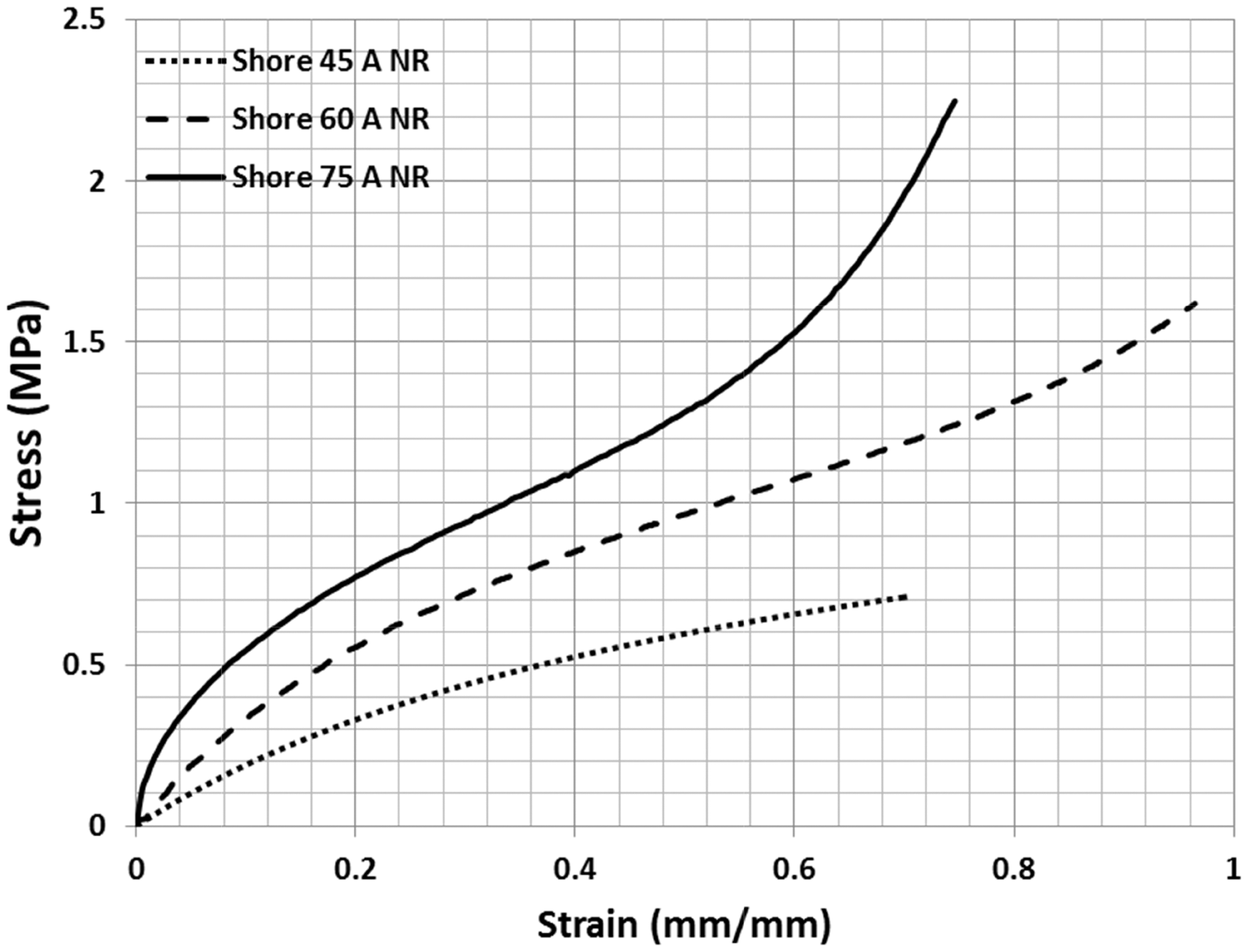

The relaxation behavior of the rubber specimens was examined through relaxation tests. Figure 5 shows the time histories of the stress decrement at a constant strain. Stress relaxation data, shown in the figure, was normalized to determine how the behavior of the specimen changes with increasing hardness. All curves initially reveal the existence of a very fast stress relaxation followed by a very slow rate of relaxation that continues in an asymptotic sense, as it is confirmed in Marvalova
25
and Haupt and Sedlan.
26
As it is also expected from a relaxation test, the shear modulus is decreasing with respect to time, or in other saying, the material resistance against the displacement is decreasing. This is due to the viscous effect existing in the dashpot of the rheological Maxwell model which eventually approaches to its asymptote.
18
It is also noticeable that decreasing hardness results in faster relaxation. In this case study, generalized Maxwell model is used and Prony coefficients are determined by applying curve fitting to the relaxation test data. These coefficients are used for the viscoelastic model of the rubber.
Relaxation test results for (a) Shore 75 A and Shore 60 A and (b) Shore 45 A.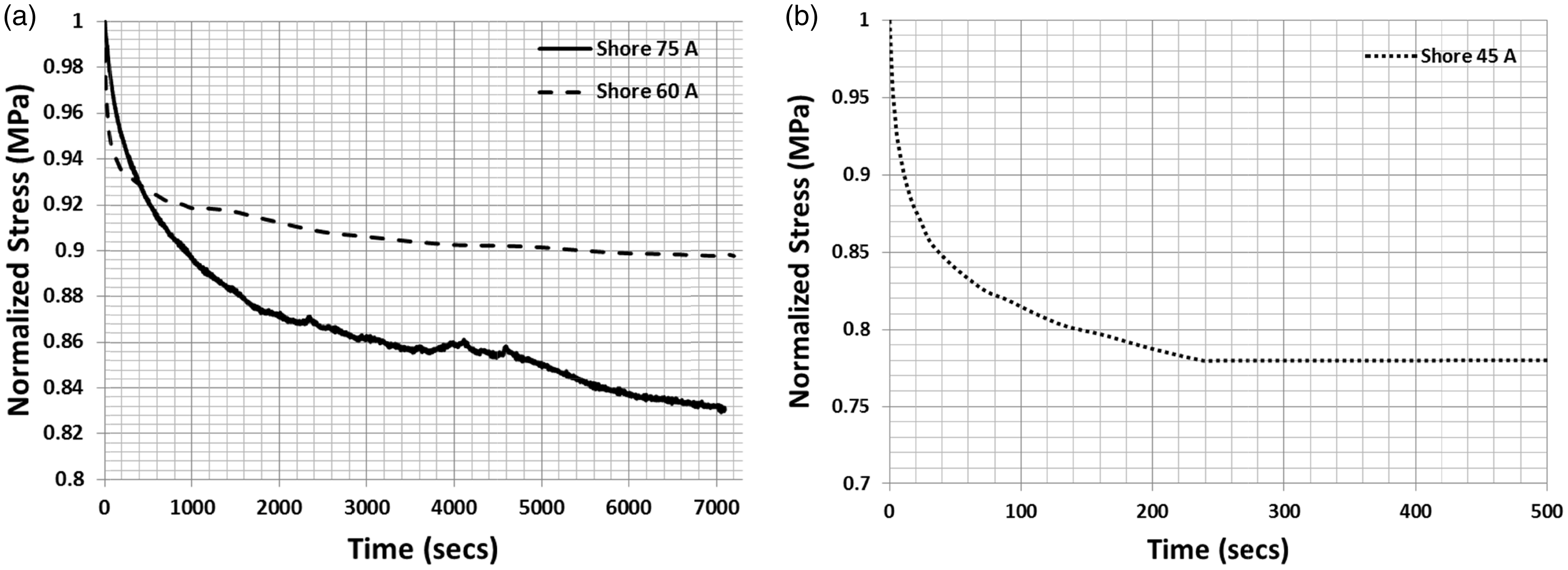
In order to validate the experimentally obtained coefficients, a numerical simulation, based on finite element method (FEM), was performed via ABAQUS FEM Solver. An identical specimen was created, as illustrated in Figure 6(a), and the natural rubber with experimentally obtained material models was assigned as the material of the specimen to determine the best model. The specimen was constrained at one end and a ramp rising displacement at a constant velocity was applied on the other end. Reaction forces were calculated at the clamped bottom side of the specimen and summed to find out the engineering stress applied to the specimen centroid. The results are shown in Figure 6(b) and (c). As shown from the numerical results, among three models, Yeoh shows the best agreement with the experimental data. As for the viscoelastic model, it can be stated that there is a good correlation between the Prony coefficients and the numerical results.
Numerical simulation results for Shore 75 A natural rubber: (a) FEM model of specimen, (b) engineering stress–strain curve comparison, and (c) relaxation curve comparison. FEM: finite element method.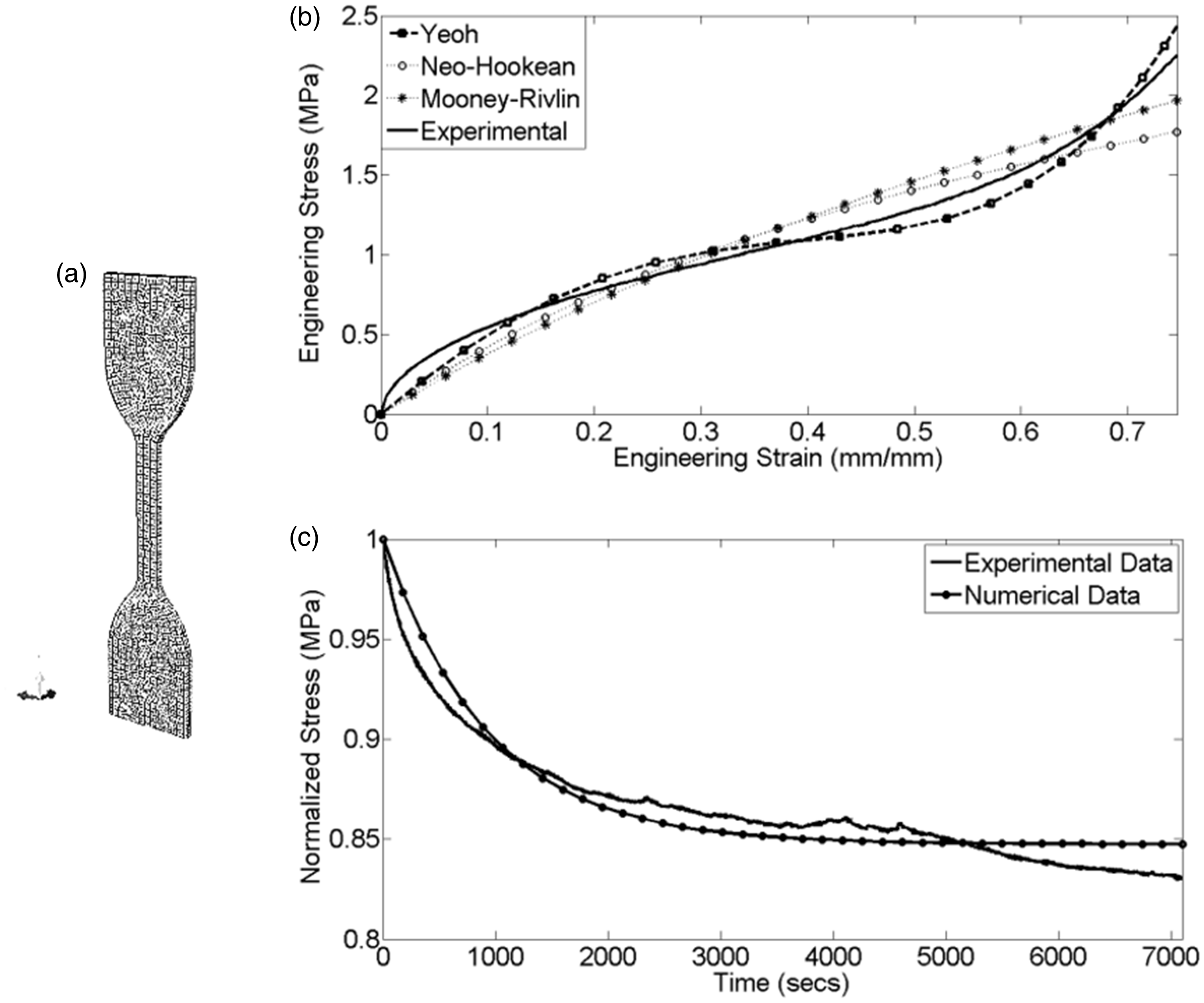
Relationship with shore hardness
As discussed in “Shore hardness” section, some empirical relationships had been defined for the relationship between shore hardness and modulus. In this part of the case study, the experimentally obtained data are compared with Gent’s relation and Rigbi formula which constitute a relationship between ASTM D2240 shore hardness and the Young’s modulus. As seen in Figure 7, it is evident that the correspondence between the predicted value by Gent’s relation and experimental value is more satisfactory compared to that of Rigbi formula.
Shore hardness versus elastic modulus.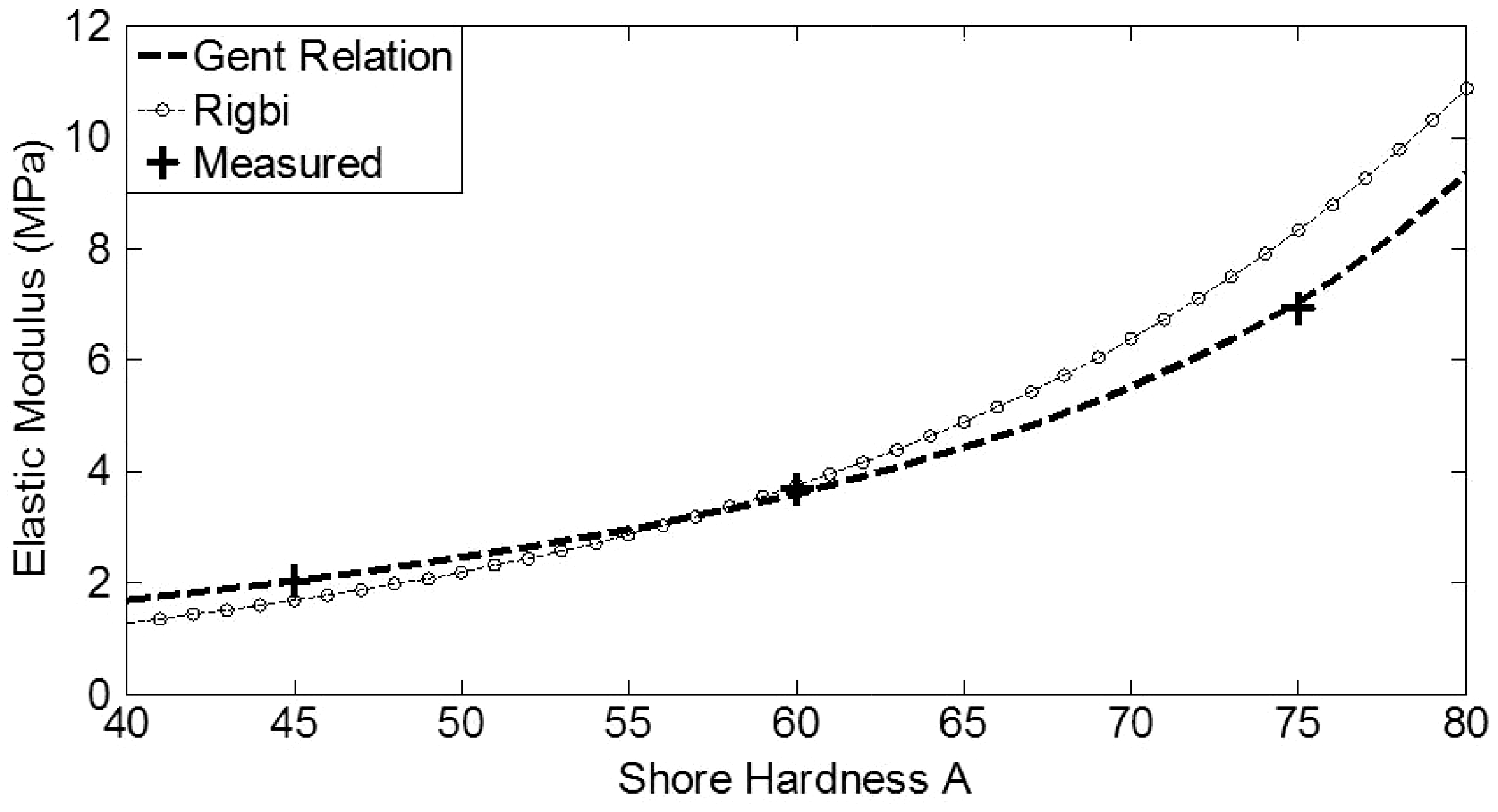
In addition, the measured shear modulus with respect to the shore hardness is also compared with the predicted values by Battermann–Köhler relation. According to Figure 8, it can be stated that initial shear modulus obtained by Yeoh model shows a good agreement with the Battermann–Köhler relation.
Shore hardness versus shear modulus.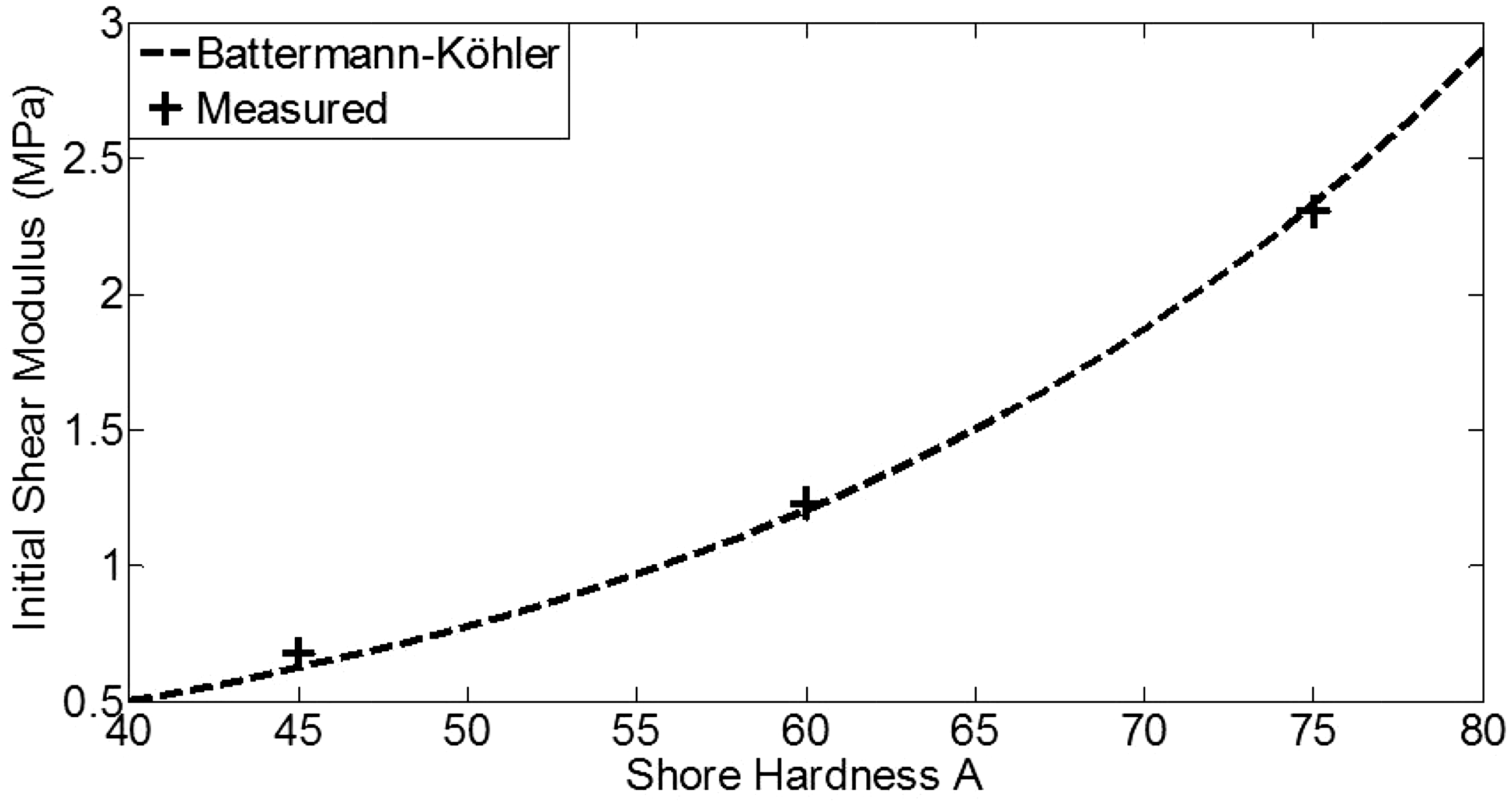
Numerical modeling of rubber shock absorber
After determining the dynamic properties of rubber as presented in previous sections, the rubber characterization was validated via a case study based on the Shore 75 A rubber shock absorber. An experimental setup was created for the validation purposes. This setup consists of two thick plates, one of which is clamped at both sides, connected to each other by the Shore 75 A shock absorber. The numerical model of the setup, shown in Figure 9, was generated by the FEM tool, ANSYS. The numerical model consists of 26,236 elements and 82,048 nodes. The contact surfaces of each part are bonded to each other.
Numerical FEM model of the setup. FEM: finite element method.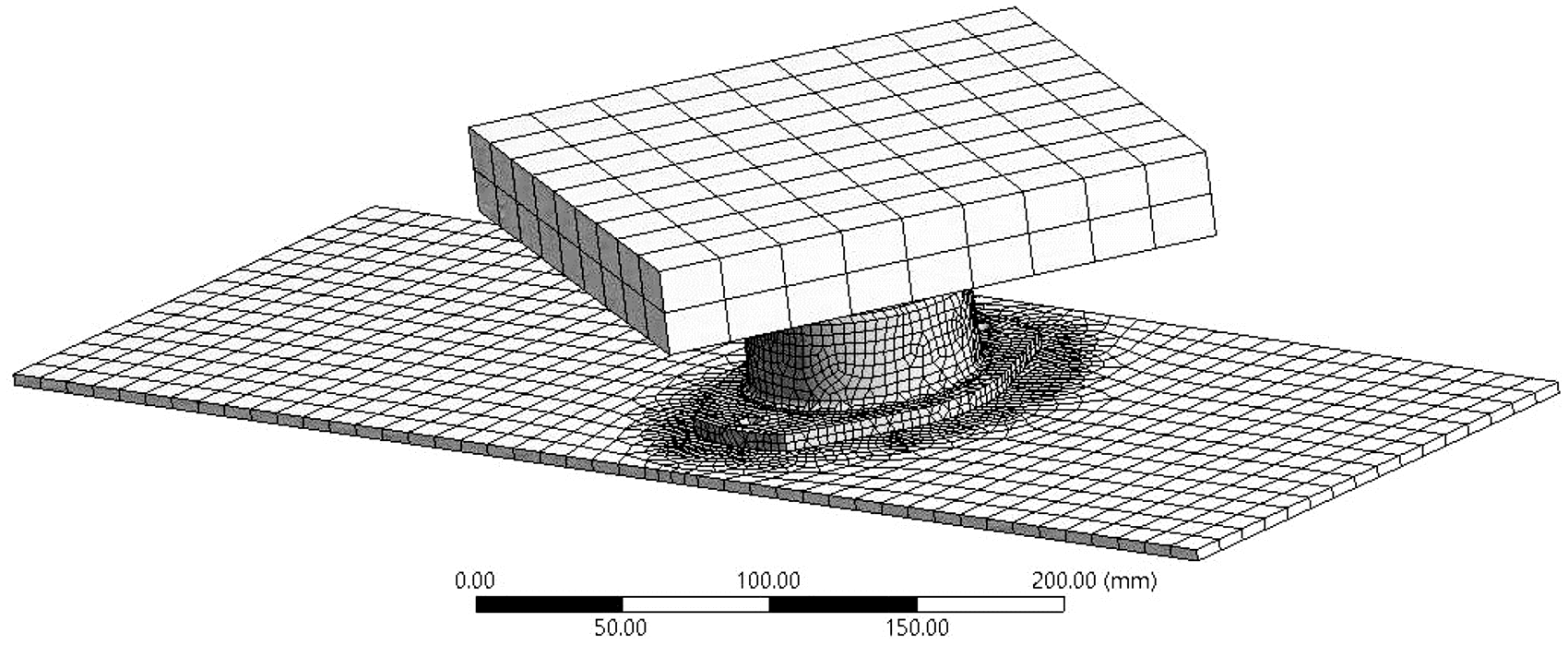
For the validation purposes, the setup was excited by a modal shaker at the bottom of the shock absorbers and the response was measured at the top plate via an accelerometer. A sine-sweep force signal with a sweep frequency between 0 and 100 Hz was applied to the structure. As for the numerical study, measured properties of the rubber were utilized for modeling the rubber shock absorber and the force data obtained from the experimental study were used as the excitation. Transient analysis was performed due to the nonlinear rubber component of the setup by using ANSYS. The responses obtained in time domain are transformed to the frequency domain via applying postprocessing and Fast Fourier Transform algorithm in MATLAB. According to the results, as in Figure 10, it can be determined that the numerically calculated acceleration response almost matches with the measured one. This result confirms that the dynamic characterization of rubber shock absorbers had been well defined.
Acceleration response.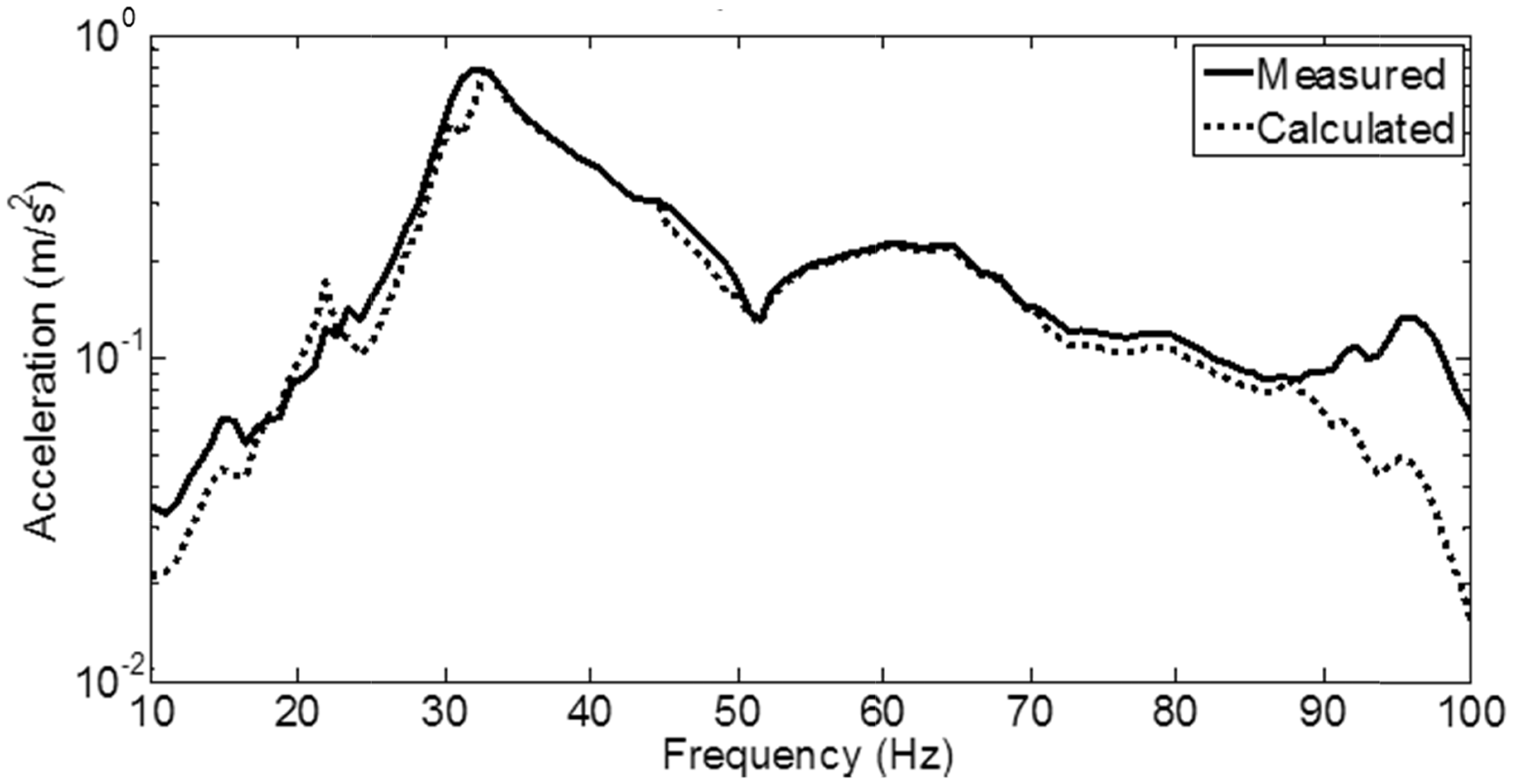
Summary and conclusions
In this study, the dynamic characterization of the rubber was discussed with the numerical and experimental case studies. Priority attention was given to hyperelastic and viscoelastic properties. Three rubber specimens having different shore hardness values were used. The specimens were subjected to quasi static uniaxial tensile loading to determine the hyperelastic properties. For this purpose, hyperelastic mathematical models such as Neo-Hookean, Mooney–Rivlin, and Yeoh were used to represent the experimental data. According to the numerical tensile test results, Yeoh exhibits the best agreement with the experimental data.
The viscoelastic properties of the rubber specimens were examined through relaxation tests and generalized Maxwell model was applied. In the numerical relaxation tests, it was determined that there is a good match between the Maxwell model and the experimental results.
The determined rubber properties were also compared with some empirical relationships which define a relationship between shore hardness and modulus. The experimentally obtained data are compared with Gent’s relation and Rigbi formula. According to the results, it can be stated that Gent’s relation is more satisfactory compared to Rigbi formula. Additionally, shear modulus with respect to the shore hardness was compared with the Battermann–Köhler relation and the results show that there is an agreement between the experimentally obtained data and the Battermann–Köhler relation.
In the final study, a setup was created to validate the dynamic characterization of the rubber. For the numerical model, hyperelastic and viscoelastic coefficients were defined as material properties. Vibration responses were measured and compared with the experimental one. According to the results, numerical response agrees quite well with the experimental one. Thus, it can be stated that hyperelastic and viscoelastic models result in extremely good dynamic characterization of rubber.
Characterizing the viscoelastic and hyperelastic properties of the rubber shock absorbers is critical especially for investigating the dynamic response of the systems at where the shock absorbers are used. This validated study can be a good reference to the mechanical system designers as well as shock and vibration engineers. Nevertheless, future studies should be planned to carry out case studies with the softer rubber shock absorbers to observe the dynamic characterization of the rubber component.
Footnotes
Acknowledgment
The authors would like to thank Tekno Kaucuk Sanayi AS company for their support on test plans, test equipment, and data collection.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.