
Abstract
It has been over a century since the interest in inventing the optimal topology for bearings arose. A significant achievement was published by Lord Rayleigh, who found the step-bearing geometry which maximise the load-carrying capacity when the classical Reynolds equation is used to model thin film flow of an iso-viscous and incompressible fluid. Since then, new optimisation methods considering some variants of governing equations for finding the best possible bearings have surfaced, one of which will be presented in this paper. Here, two different formulations for compressible flow, i.e. ideal gas and constant bulk modulus compressibility, as well as the classical Reynolds formulation will be used in combination with the method of moving asymptotes for topological optimisation. All three of these problem formulations provide us with unique geometries, which either maximise the load-carrying capacity or minimise friction, for fluids with a wide variety of compressibility.
Introduction
The geometry is of highest importance for bearing performance and improvements have the potential to reduce the risk of wear and lower friction, thereby making substantial savings. For this reason, there is great interest in finding the geometry that maximises the load-carrying capacity (LCC) and thus minimises the risk for wear of a hydrodynamically lubricated bearing. Therefore, this work started very long time ago with a publication by Rayleigh, dating back to 1918.
1
Since then, researchers have presented optimal solutions, based on other governing equations than the classical one-dimensional Reynolds equation, and these have resulted in a selection of LCC-maximising geometries, see e.g. literature.2–8 Yet, there are no LCC-maximising solutions for fluids exhibiting constant bulk modulus type of compressibility, which is of particular interest since it appears in the classical formulations of cavitation models9–12 and later on in literature.13–16 In this case, the constitutive relation for the compressibility is defined by

The first one who optimised the geometry for minimum coefficient of friction, while applying the classical Reynolds formulation to govern the fluid flow, was Rohde. 17 More recently, Rahmani et al. 18 investigated the Rayleigh step bearing for different boundary conditions and presented both LCC-maximising and friction-minimising step geometries. Maday 2 presented a new method for solving Rayleigh’s problem setup of maximising LCC. Shortly thereafter, Maday performed the analysis on an infinitely wide gas slider 3 using the method developed in another study, 2 finding the optimum slider geometry. The resulting bearing geometry turned out to be a converging wedge followed by a step down to the trailing land. In addition, some important findings regarding hydrodynamically lubricated slider bearings are the work of Auloge et al. 4 More precisely, they actually presented the bearing geometry that maximises LCC when a non-Newtonian fluid rheology model is considered and they found that the result was a step bearing different from Rayleigh’s.
Later, Boldyrev 5 analytically solved a much more advanced problem including the Reynolds equation with periodic boundary conditions coupled with the Elrod-Burgdorfer condition. This work resulted in an optimal bearing geometry different from the one obtained when using Dirichlet conditions.
There are also closely related optimisation works for slider bearings, which have advanced into the three-dimensional domain, taking into account the physical behaviour of fluid flow escaping on the sides of the bearing. Fundamental work here are e.g. literature.19–22 Rohde and McAllister 19 were early in presenting their very own development of an algorithm for the three-dimensional optimisation problem, which maximises the LCC. About two decades later Boldyrev 20 studied the optimisation problem with the same objective, but with a (compressible) ideal gas model governing the fluid flow, and after additionally two more decades he further perfected the work. 21 With new modern tools, Buscaglia et al. 22 replicated the work by Rohde and McAllister, 19 demonstrating that the same result can be obtained with different techniques, numerically.
There have also been closely related findings for journal bearings. It was Maday 23 who first took Rayleigh’s optimisation of the infinitely wide slider bearing further, using it to find the optimal solution for incompressible flow in a journal bearing application. Later, Buscaglia et al. 24 found an optimal geometry for a journal bearing with three sections using the Burgdorfer slip flow gas model. 25 In addition, they found an optimal solution for three-dimensional slider bearing using the same slip-flow gas model. Both Maday 23 and Buscaglia et al. 24 resulted in converging-gap geometries, similar to the those found by Maday. 3
Topological optimisation has for a long time been used in the field of structural mechanics, in order to minimise weight and strain energy of various kind of components. One particular type of gradient-based algorithm, for this type of optimisation, is the method of moving asymptotes (MMA) developed by Svanberg,
26
and the globally convergent development thereof (GCMMA).
27
However, in the field of tribology, numerical topological optimisation using these algorithms has not yet been very frequently applied. In fact, to the authors’ knowledge, no one has previously used topological optimisation methods to explore bearing designs for compressible flow that minimises the coefficient of friction, i.e.

In this paper, we will use the built-in facilities for optimisation in COMSOL Multiphysics®, 28 to find the geometry of infinitely wide bearings that maximises LCC for constant bulk modulus type of compressible fluids. In addition, we will apply it to find the bearing geometries that minimises the coefficient of friction for incompressible, ideal gas and constant bulk modulus compressible fluids. To verify and ensure the accuracy of the optimisation method applied, we will first use it to replicate Rayleigh’s and Rohde’s solutions for the incompressible case and Maday’s solution for the ideal gas type of compressibility.
Governing equations and implementation
The Reynolds equation governing thin film flow of compressible fluids under steady conditions reads

The friction force can be calculated by integrating the shear stresses acting on the flat moving surface over the whole length, L, of the bearing, i.e.

In this expression for the friction force, the plus and the minus signs indicates that it is evaluated at the lower moving or the upper stationary surface, respectively. Since the moving surface is commonly also flat in practical applications, we will compute the friction force accordingly.
Constant bulk modulus compressibility
From the constitutive relationship between pressure and density in equation (1), we can obtain an explicit relationship between the pressure and the density. Indeed



Ideal gas compressibility
An ideal gas exhibits a linear relation between pressure and density. With that in mind, equation (3) can be non-dimensionalised and finally written as


Numerical solution
Both equations (6) and (8) were implemented inside the Coefficient Form PDE Physics Interface in COMSOL Multiphysics®. For the constant bulk modulus model, the initial condition for (6) over the whole length was specified as θ = 1, corresponding to an ambient pressure of p = 0. In all of the numerical solutions, the bearing number was specified as
For the ideal gas case, the initial condition for equation (8) over the whole length was specified as

Except for those studies where Γ was varied, the results were obtained using a value of Γ = 50. This setting corresponds to, for instance, u = 0.45 ms–1,
Optimisation method
The optimisation problem was setup inside the Optimization Physics Interface in COMSOL Multiphysics®. More precisely, it is a gradient-based optimisation solver written by Svanberg, 27 specifically designed with topology optimisation in mind. In the literature the method is referred to as the globally convergent method of moving asymptotes (GCMMA) and is available in COMSOL under the name MMA.
In order to perform a topological optimisation, a control variable field and an objective function need to be specified. The control variable for the bearing geometry is chosen as

In the present study, the lower limit set to 1 with the exception of the analysis, presented in the section Minimising friction force, comparing friction and LCC optimisation, where a thinner dimensionless fluid film is required for the friction optimisation to obtain the same LCC. The upper limit was set to 100, which is high enough to not restrict the evolution of the bearing geometry during the optimisation procedure. Note that choosing the lower limit of 1 does not restrain generality as both h and LCC scales with hr. There is also a need for initial conditions

In the section Minimising friction force, we first specify the objective function as the hydrodynamically generated force by either equation (14) or (15) and present the outcome of the study with the topological optimisation routine, to find the geometry that maximise the LCC of the bearing. Then we take the optimisation one step further by applying the same routine but with the coefficient of friction, i.e. either equation (19) or (20) as objective function.
Load
To optimise the LCC, the objective function was formulated as the integral of the absolute pressure distribution


For the constant bulk model, the pressure p is substituted with

Friction
To minimise the coefficient of friction μ, the objective function is specified as fraction between the friction force and the LCC, i.e. equation (2). In practise, we used the scaled coefficient of friction



This will result in the scaled friction coefficient


Results and discussion
The results have been divided into three sections. In the following section, we verify our approach by first comparing with Rayleigh’s
1
and Rohde’s
17
findings, for incompressible flow. Then we compare our results for the ideal gas case with the findings by Maday.
3
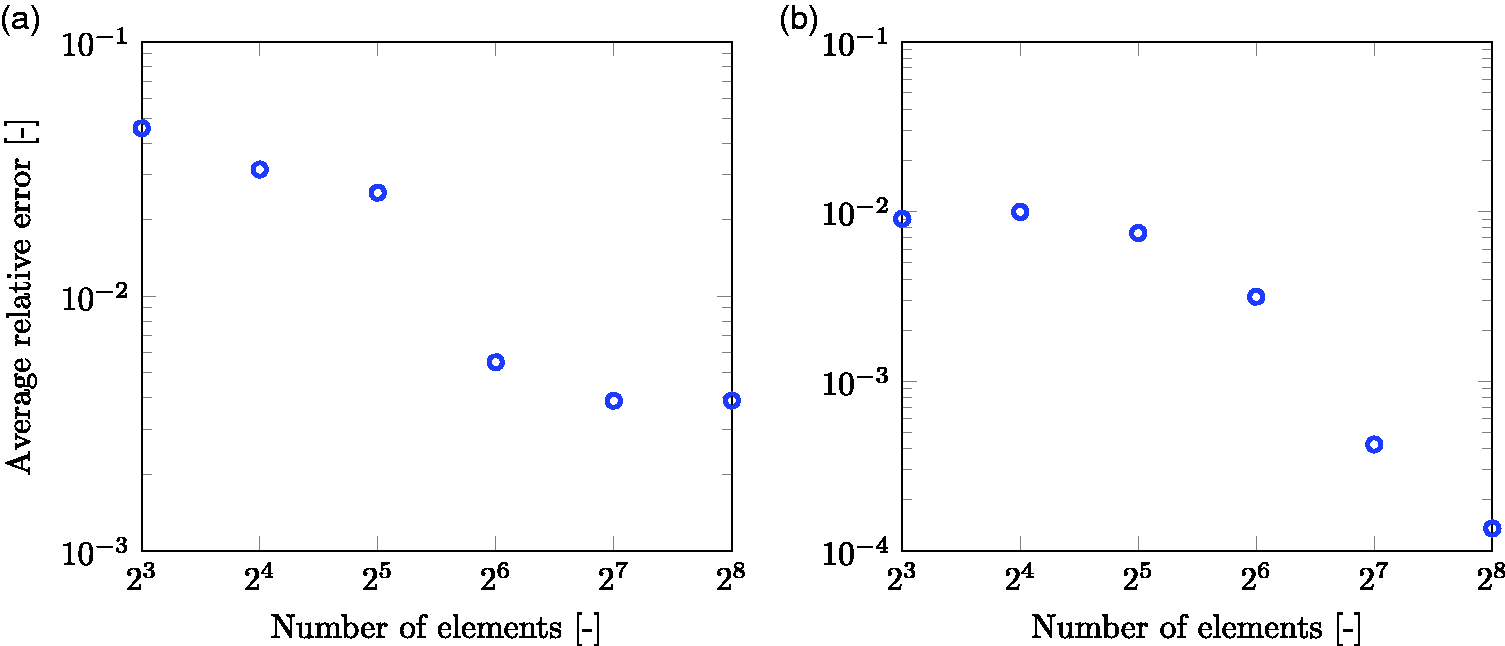
Alongside the convergence studies for LCC optimisation, studies were also conducted to confirm the convergence of the minimisation of the coefficient of friction. The results for both the constant bulk modulus and the ideal gas model are presented in Figures 1 and 2, respectively. Since there are no available results to compare with in this case, the reference geometries were obtained using meshes with 1024 elements. In the section Maximised LCC for constant bulk modulus fluids, the bearing geometries generated from the topological optimisation for LCC with the constant bulk modulus model will be presented. In the section Minimising the coefficient of friction, the bearing geometries generated for the lowest possible coefficient of friction, for both the constant bulk modulus and the ideal gas models, will be presented.
Mesh convergence using the constant bulk modulus model, illustrated in terms of the average geometrical relative deviation. (a) Optimisation for maximum LCC. (b) Optimisation for minimum coefficient of friction. Mesh convergence using the ideal gas model, illustrated in terms of the average geometrical relative deviation. (a) Optimisation for maximum LCC. (b) Optimisation for minimum coefficient of friction.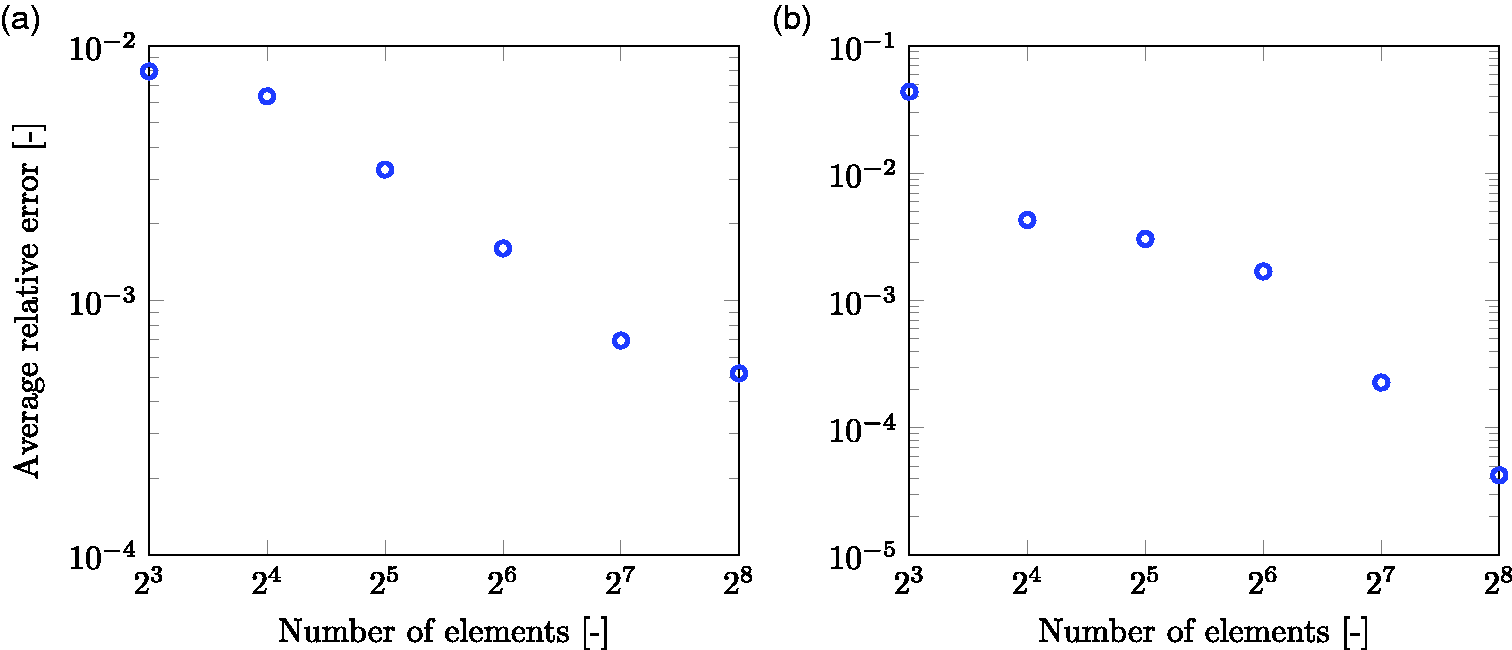
The geometry that maximises the LCC also generates the thickest fluid film. If one instead optimises for minimum friction force the same LCC comes with a reduced fluid film thickness. In the section Minimising friction force, an investigation of how much the coefficient of friction and film thickness reduces, when optimising for minimum friction force as compared with the solution for maximum LCC.
Validation
In order to investigate the applicability of the present approach implemented in COMSOL Multiphysics®’s built-in, MMA based, topological optimisation facility, we first applied it to see if was possible to reproduce Rayleigh’s findings. To do so, topological optimisation for maximum LCC was performed, with the constant bulk modulus model using β = 10 GPa, which closely resembles an incompressible fluid. To quantify and assure the accuracy of the proposed methodology, a mesh convergence study was conducted. As a measure of the accuracy, an average relative error defined as the average geometrical relative deviation from a reference geometry was employed, i.e.

The result of the convergence study is shown in Figure 1(a). To be certain that the optimisation for minimum coefficient of friction also converges when the mesh is refined, a similar study was conducted also in this case. The solution presented by Rohde 17 was taken as reference solution to verify the mesh convergence when optimising for minimum coefficient of friction. The result is shown in Figure 1(b).
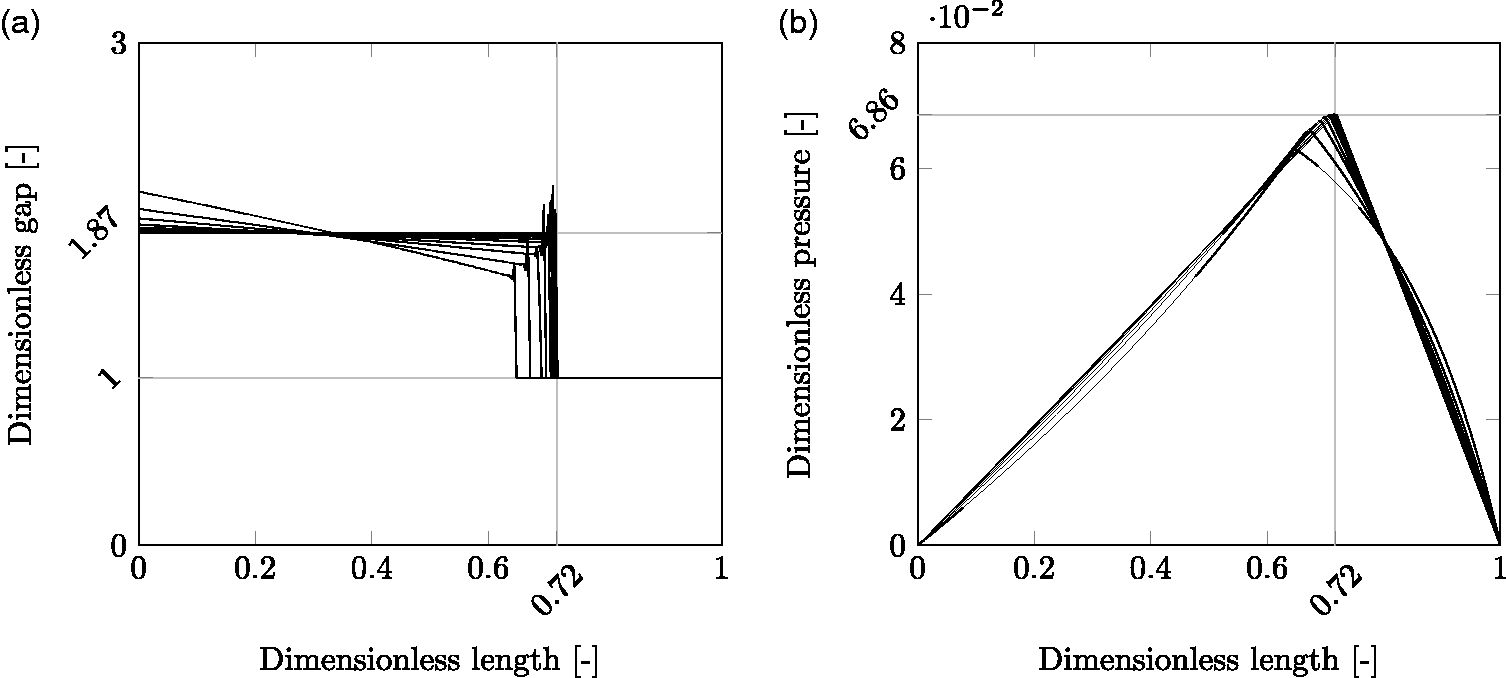
To leave no uncertainties, similar mesh convergence studies were conducted using the ideal gas model, for both the maximisation of LCC, see Figure 2(a) and the minimisation of the coefficient of friction, see Figure 2(b). For the maximisation of LCC the analytic solution found in Maday, 3 for Γ = 50, was used as the reference, and since there is yet no analytic solution for the minimum coefficient of friction, a mesh with 1024 elements was used to obtain a reference. From Figures 1 and 2, it can be seen that the mesh with 256 elements render average relative errors, substantially smaller than 1% in all cases, and it was judged that a mesh with 256 elements is fine enough for carrying out the rest of the optimisation studies presented herein.
The finest mesh in the convergence study for the constant bulk modulus model with β = 10 GPa has 512 elements. The topologically optimised bearing geometry obtained using this setting is shown in Figure 3, together with the corresponding pressure distribution. Figure 3(a) shows a non-dimensional step-bearing geometry, with a gap of 1.867 at the inlet and a step located at 0.718, which, are identical to the values presented in Rayleigh.
1
At the end of the leading edge land there is small notch, which increases in height when the mesh gets denser. The depth of the notch can be reduced by specifying finer tolerance for the MMA-optimisation procedure; however, this will considerably increase the simulation time. Figure 3(b) shows the classical (piece-wise linear) dimensionless pressure distribution The topologically optimised geometry and the corresponding dimensionless pressure distribution, obtained by maximising the LCC for the incompressible case β = 10 GPa, using a mesh with 512 elements. (a) Optimised bearing geometry. (b) Corresponding pressure distribution.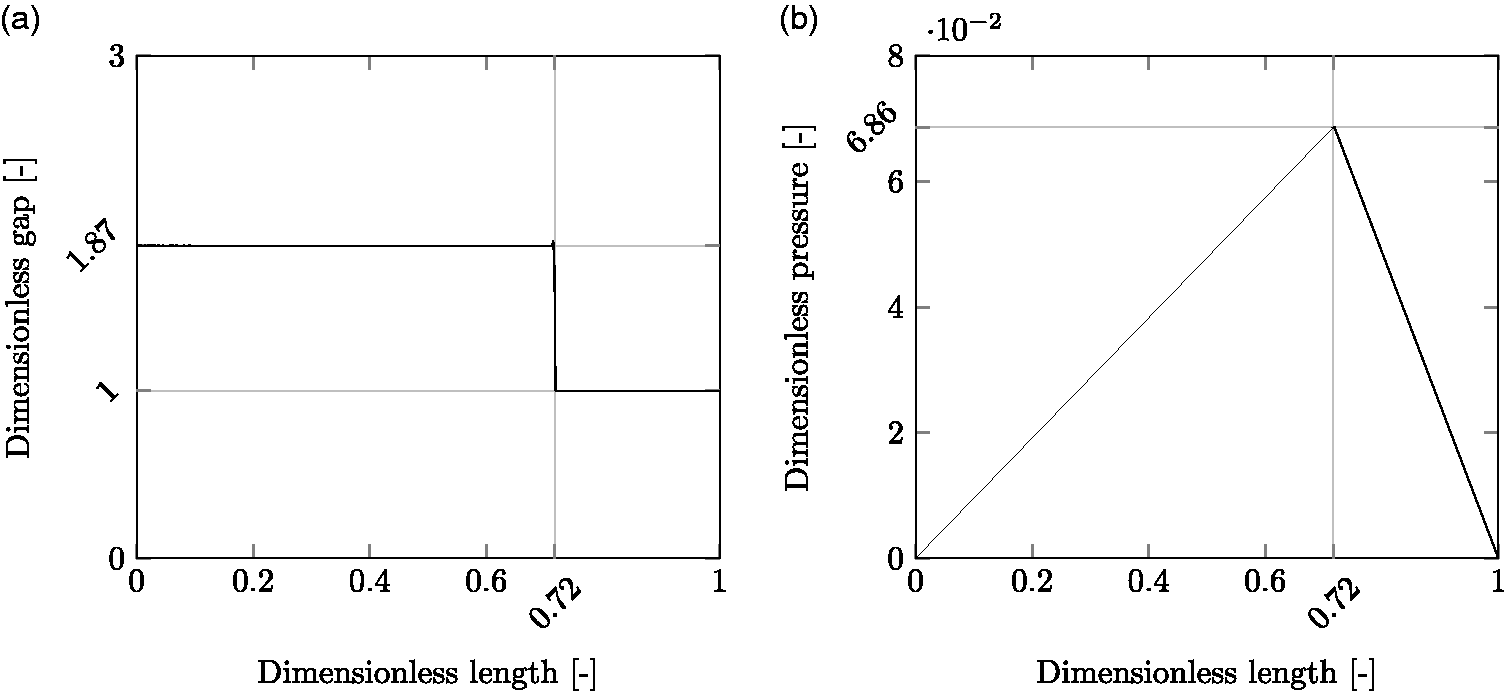
To illustrate the capability of the present methodology, topological optimisation based on the Reynolds type of equation for ideal gas flow, given by equation (10) was next performed. Indeed, the results replicating the LCC-maximising ones that Maday
3
found were obtained with the setting Γ = 50 and The topologically optimised geometry and the corresponding dimensionless pressure distribution, obtained by maximising the LCC for the ideal gas model 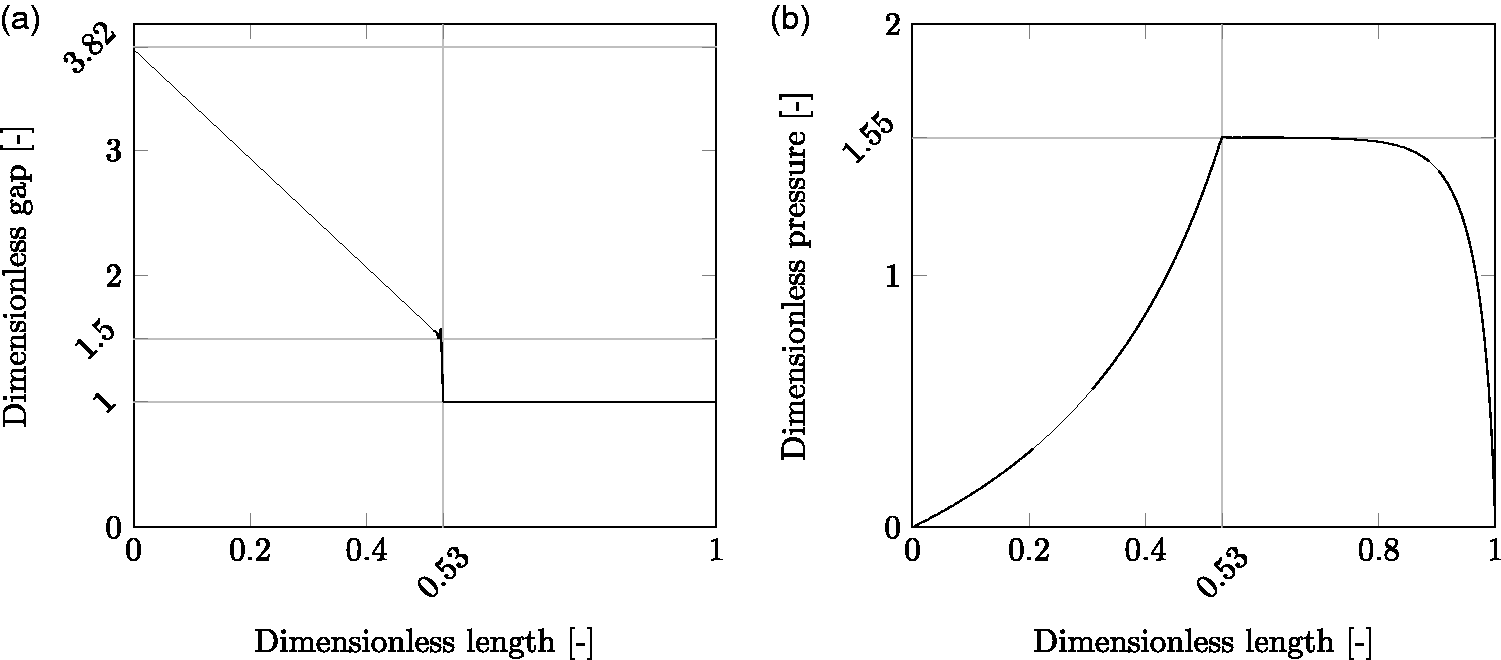
The resulting optimal bearing geometry and the corresponding dimensionless pressure distribution, which render the lowest coefficients of friction obtained using the ideal gas model with incompressible settings Γ = 1 and ε = 0 are shown in Figure 5(a).
The topologically optimised geometries and the corresponding dimensionless pressure distribution for incompressible flow, obtained by minimising coefficient of friction using the ideal gas model with Γ = 1 and ε = 0. (a) Optimised bearing geometry. (b) Corresponding pressure distribution.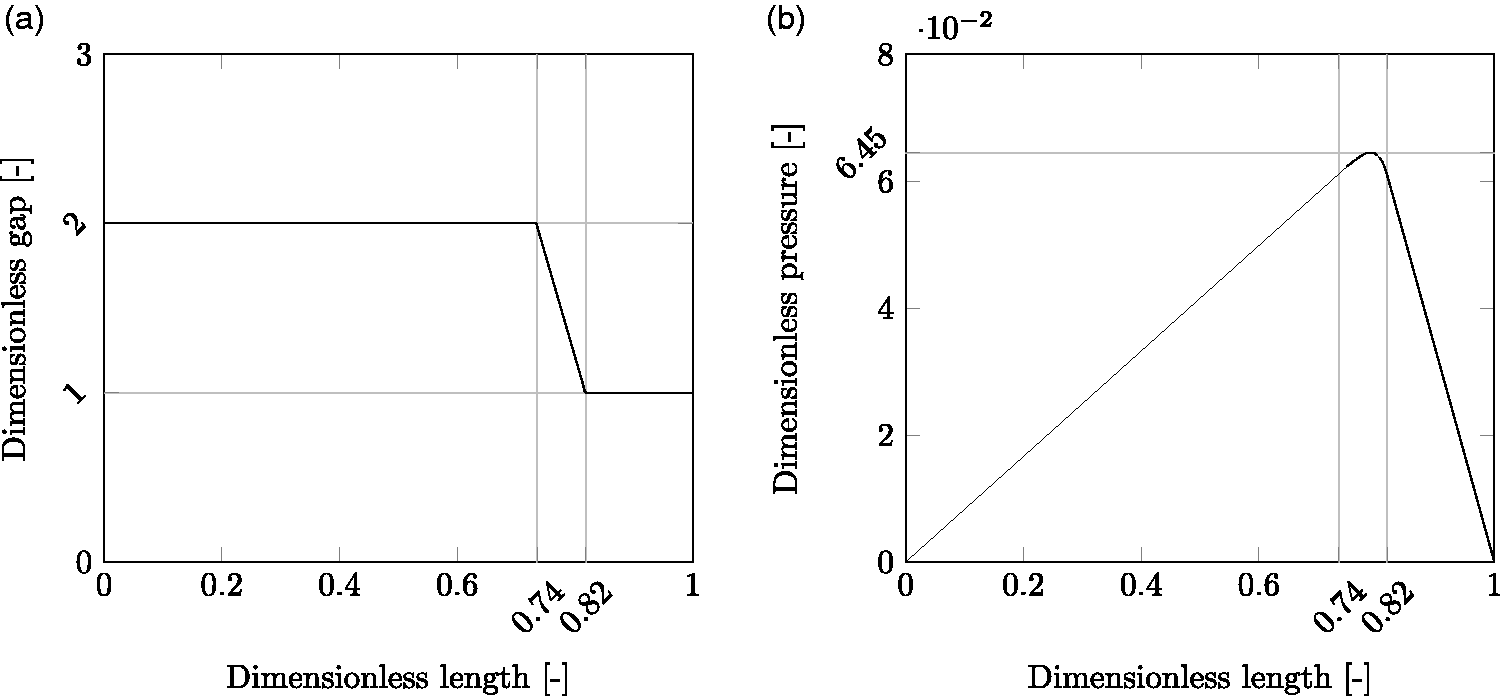
In this case, the solution to equation (10) becomes independent of Γ, leading to that the optimal bearing geometry is independent of Γ. The resulting “master” geometry (optimal for all settings) is depicted in Figure 5(a), which also confirms the result of Rohde.
17
In dimensionless form, the optimal geometry consists of a flat inlet section with the film thickness of 2.00, and from
Maximised LCC for constant bulk modulus fluids
With the present methodology for LCC optimisation validated against the results in Rayleigh
1
and Maday,
3
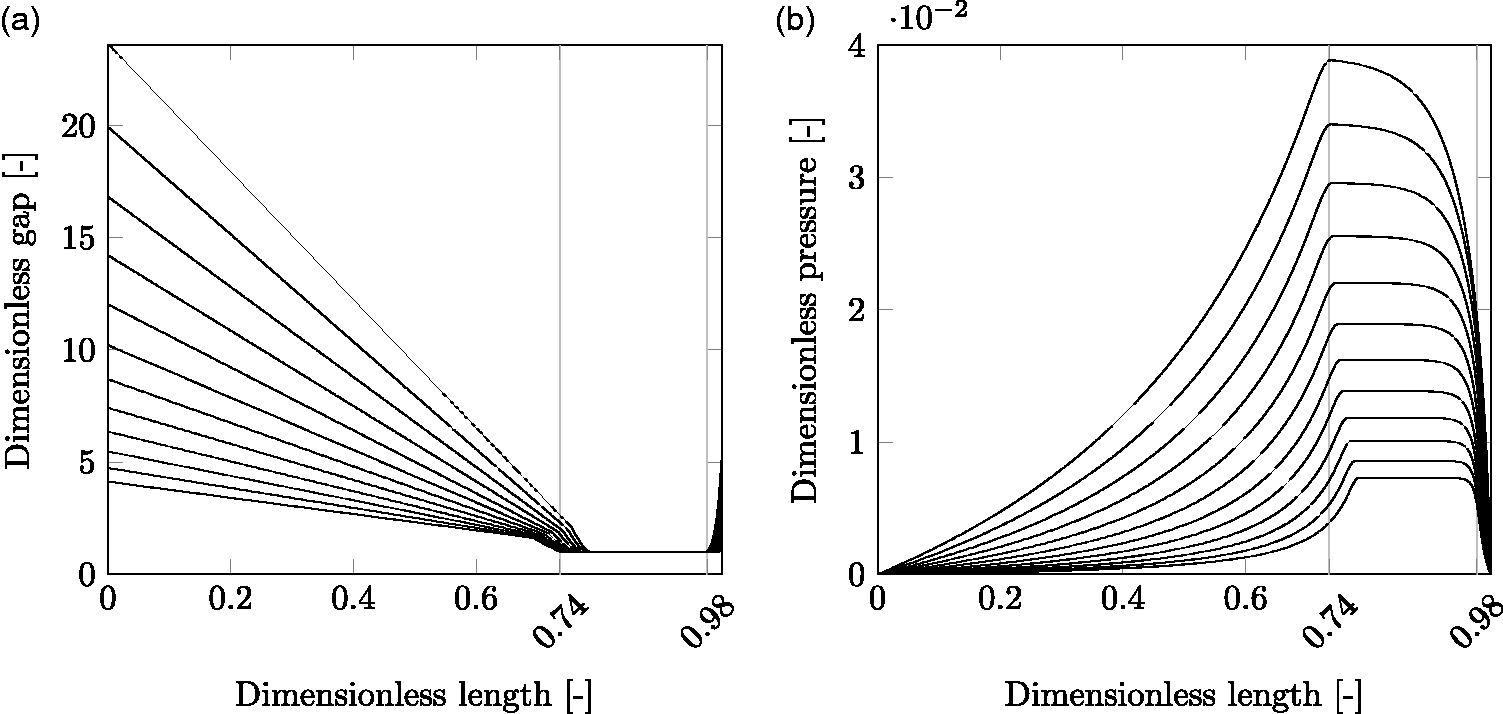
topological optimisation for maximum LCC was conducted using a 256-element mesh while varying the bulk modulus. The bulk modulus was varied from 104 to 109 Pa with 2/10 decade steps The topologically optimised geometries and the corresponding dimensionless pressure distributions, obtained by maximising the LCC for The topologically optimised geometries and the corresponding dimensionless pressure distributions, obtained by maximising the LCC for 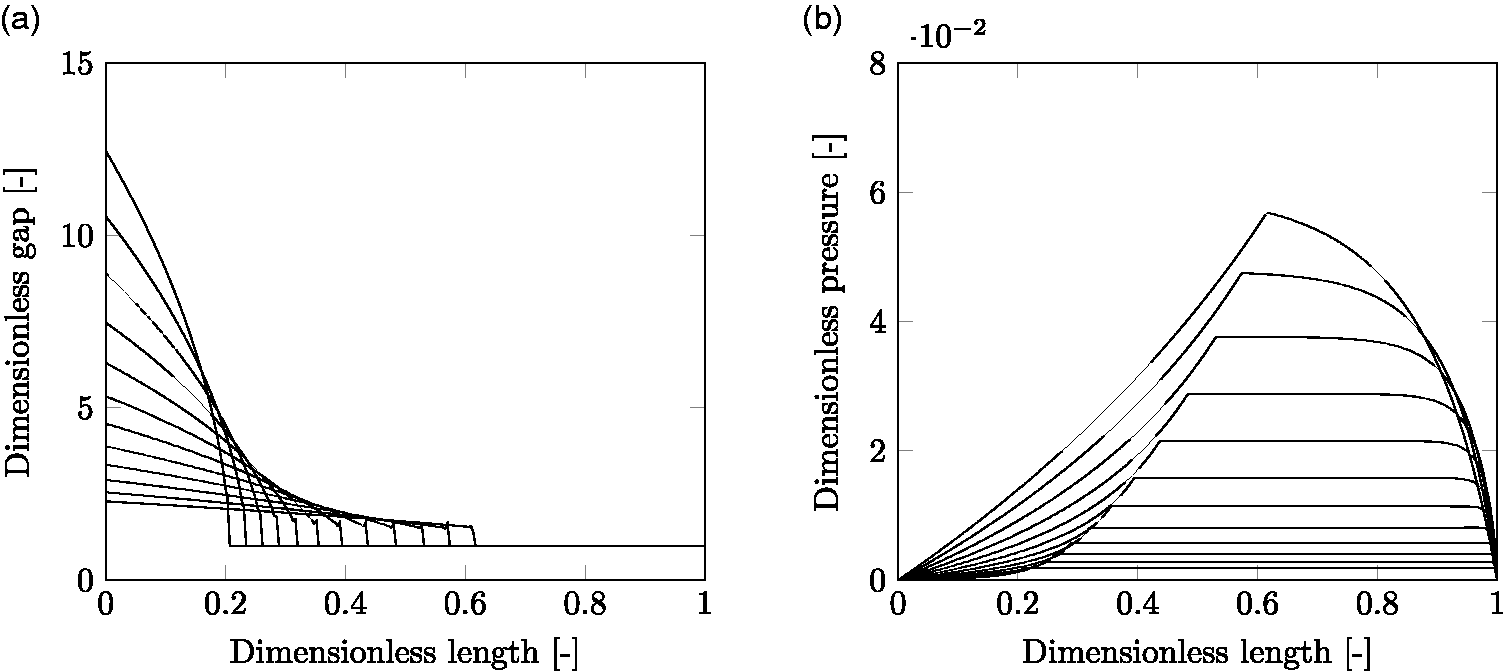
It is observed that the corresponding geometry and pressure distribution pairs can be easily identified by locating the point at the x-axis where the flat trailing land starts, and where the pressure distribution first reaches its maximum value.
Figure 7(b) does not only show how the pressure distributions vary with β; it also shows the convergence towards the solution found by Rayleigh, which is virtually indistinguishable from the solution at
Almqvist et al., 31 in parallel to this work, studied the problem analytically and they found the bearing geometry that maximise the LCC, for fluids exhibiting constant bulk modulus type of compressibility. The results justify the correctness of the numerical findings presented herein, and the mathematical analysis grants even better understanding.
Minimising the coefficient of friction
Next, we will apply the present methodology to deduce the bearing geometries that minimises the coefficient of friction. To this end, the optimisation is performed using the coefficient of friction as the objective function, for a given minimum film thickness. The study was performed both for the ideal gas model, with varying values of Γ, and for the constant bulk modulus model, with varying values of β. All numerical simulation results were obtained using a mesh consisting of 256 elements. The resulting optimal bearing geometries that render the lowest coefficients of friction and the corresponding pressure distributions for the ideal gas model, with varying compressibility numbers Γ, are separated into a lower and a higher range, depicted in Figures 8 and 9.
The topologically optimised geometries and the corresponding dimensionless pressure distributions, obtained by the minimising coefficient of friction for The topologically optimised geometries and the corresponding pressure distributions, obtained by minimising the coefficient of friction for 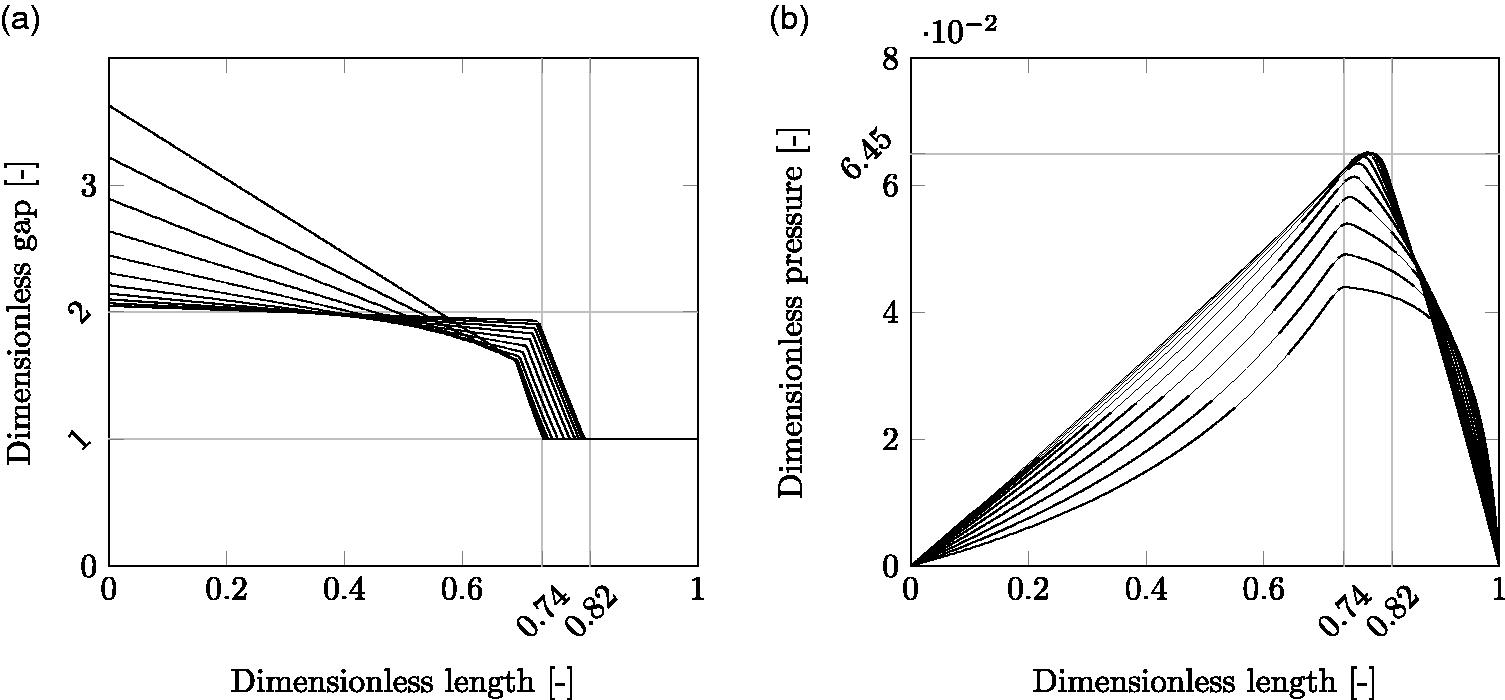
It is observed that LCC-optimised geometries shown in Figure 4(a) and the friction coefficient optimised ones shown in Figure 8(a) exhibit tapered inlet zones and flat lands towards the trailing edge. The major difference is that the LCC-optimised geometry has a vertical step, whereas the corresponding portion of the coefficient of friction optimised geometries has a tapered step. Note that although the tapering may seem linear to the naked eye, they are in fact not. We note that the major difference between the geometries in Figure 8(a) and the ones for
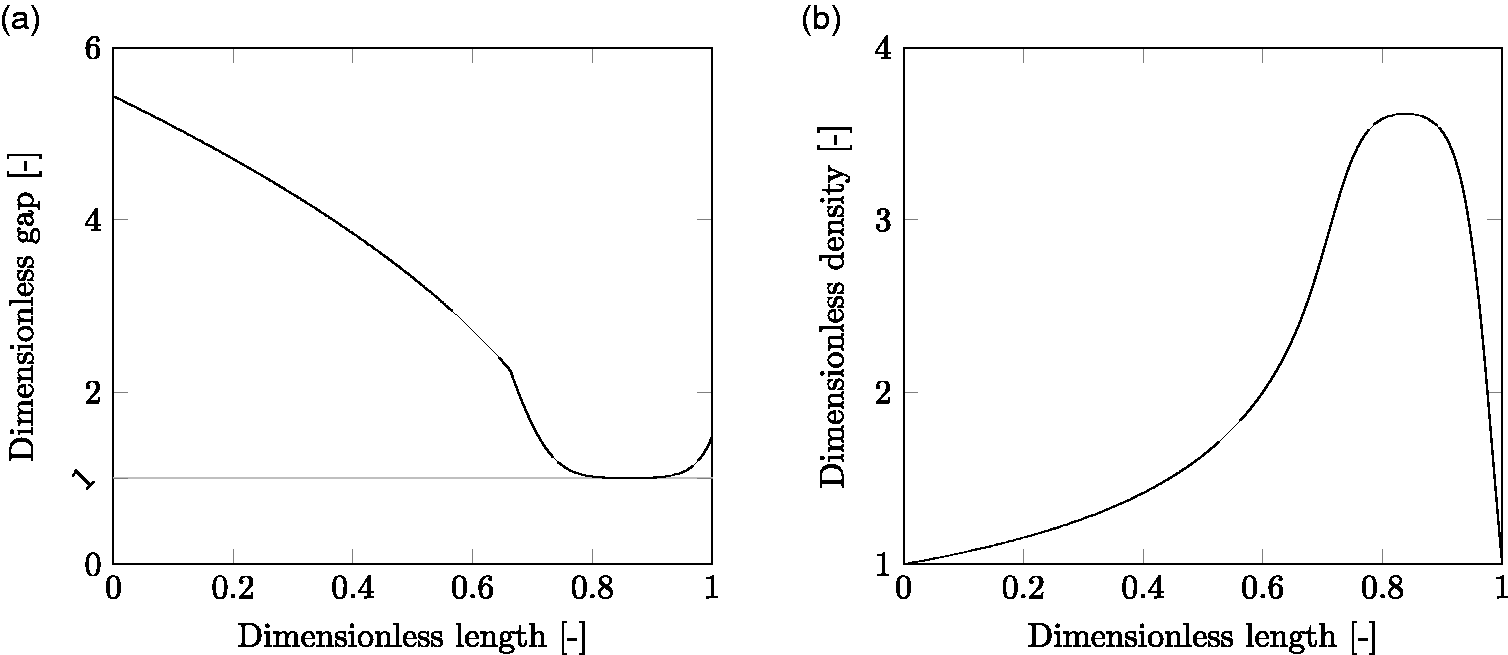
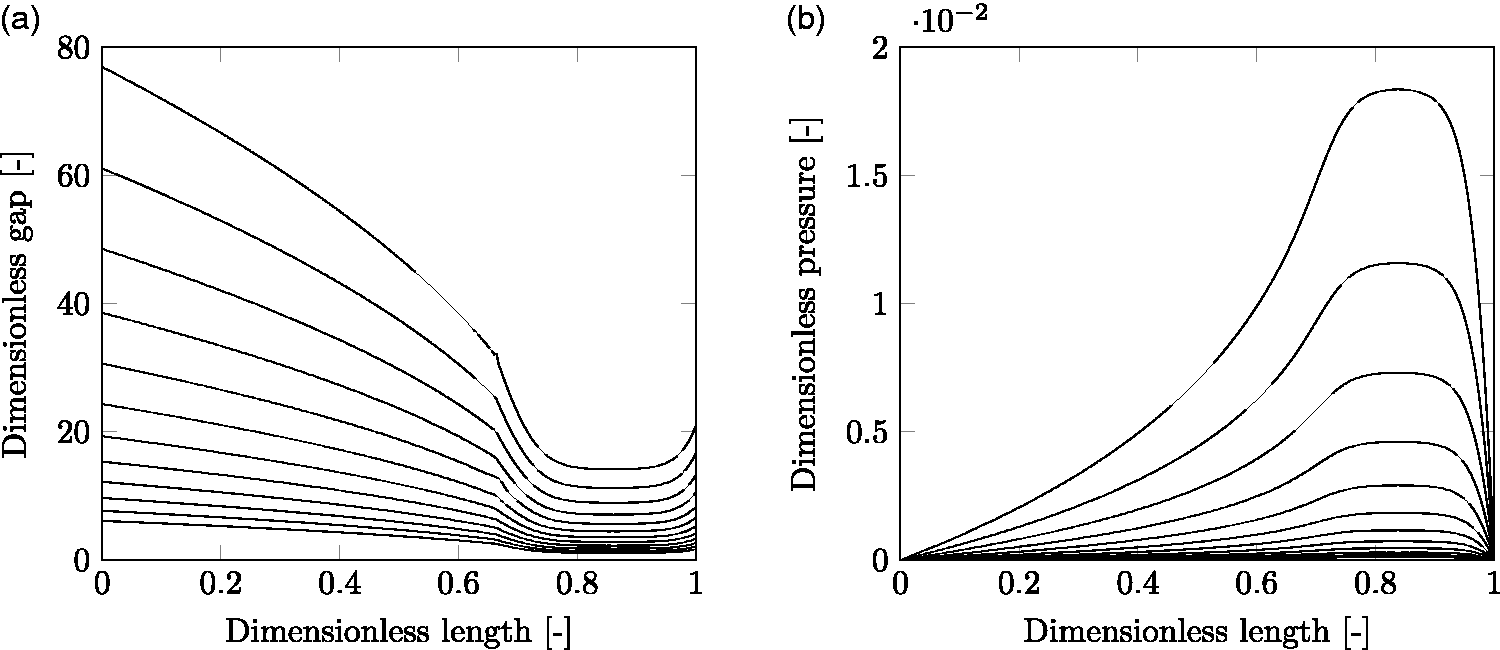
The resulting optimal bearing geometries that render the lowest coefficients of friction and the corresponding pressure distributions for the constant bulk modulus model with varying β-values are also separated into a higher- The topologically optimised geometries and the corresponding dimensionless pressure distributions, obtained by minimising the coefficient of friction for The topologically optimised geometry and the corresponding θ solution, obtained by minimising the coefficient of friction for The topologically optimised geometries and the corresponding dimensionless pressure distributions, obtained by minimising the coefficient of friction for 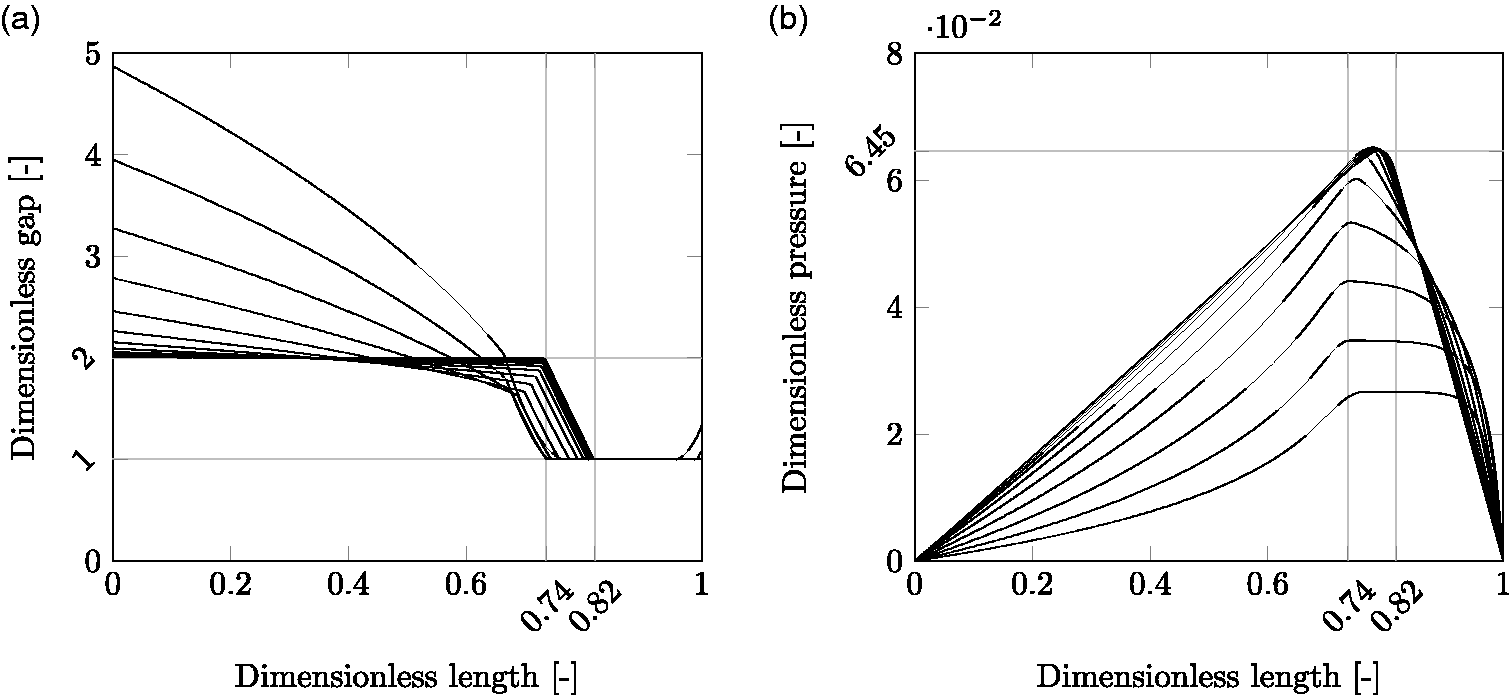
Minimising friction force
The topological optimisation presented in the previous sections was carried out, both for the ideal gas model and the constant bulk modulus model with the objective set to either maximise the LCC or minimise the coefficient of friction, for a given minimum film thickness. For many engineering applications the interest would, however, rather be to minimise the friction force given an applied load. Next, a scheme facilitating the identification and selection of an optimal geometry for a given load and type of compressibility is shown in Figure 13. To this end, some input parameters are required, i.e.
At this stage, the dimensionless LCC should be calculated according to equation (22), i.e.
Bearing geometry selection scheme. Scaling parameters for the incompressible model. Scaling parameters for the ideal gas model. Scaling parameters for the constant bulk modulus model.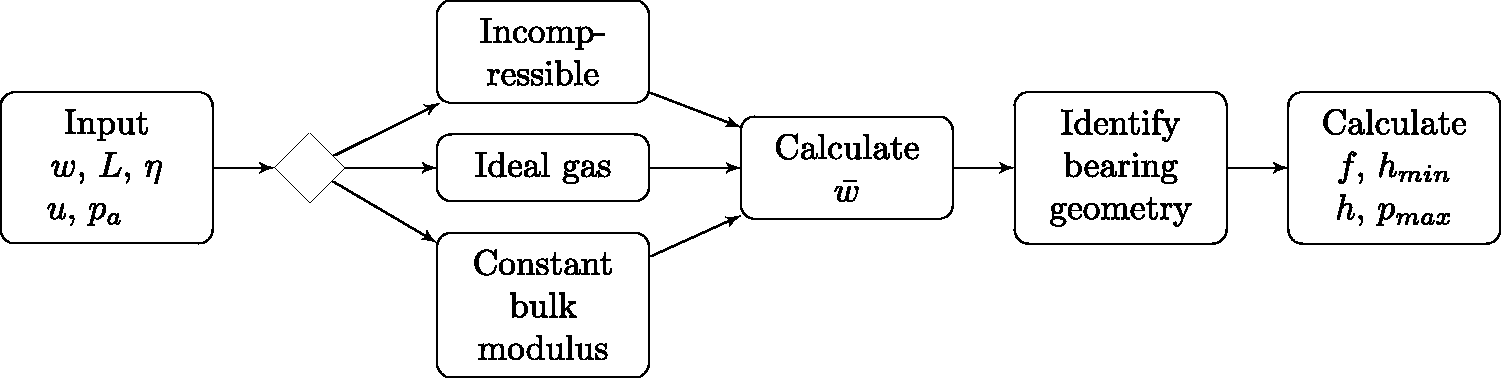
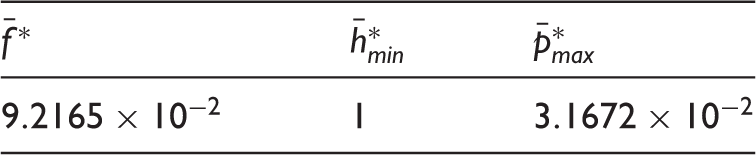

Having calculated the dimensionless LCC, one can identify the corresponding geometry in either Tables 1–3, containing data for the incompressible, ideal gas or constant bulk modulus models, respectively. The friction force, the minimum film thickness and the maximum hydrodynamic pressure can now also be obtained.
For the incompressible flow model, there is only one set of scaling parameters, i.e. the set in Table 1, and this is because of the master geometry depicted in Figure 14 (found by Rohde
17
), which can be rescaled for all LCC.
The topologically optimised geometry and the corresponding dimensionless pressure distributions, obtained by minimising the friction force under incompressible flow. (a) Optimised bearing geometries. (b) Corresponding pressure distributions.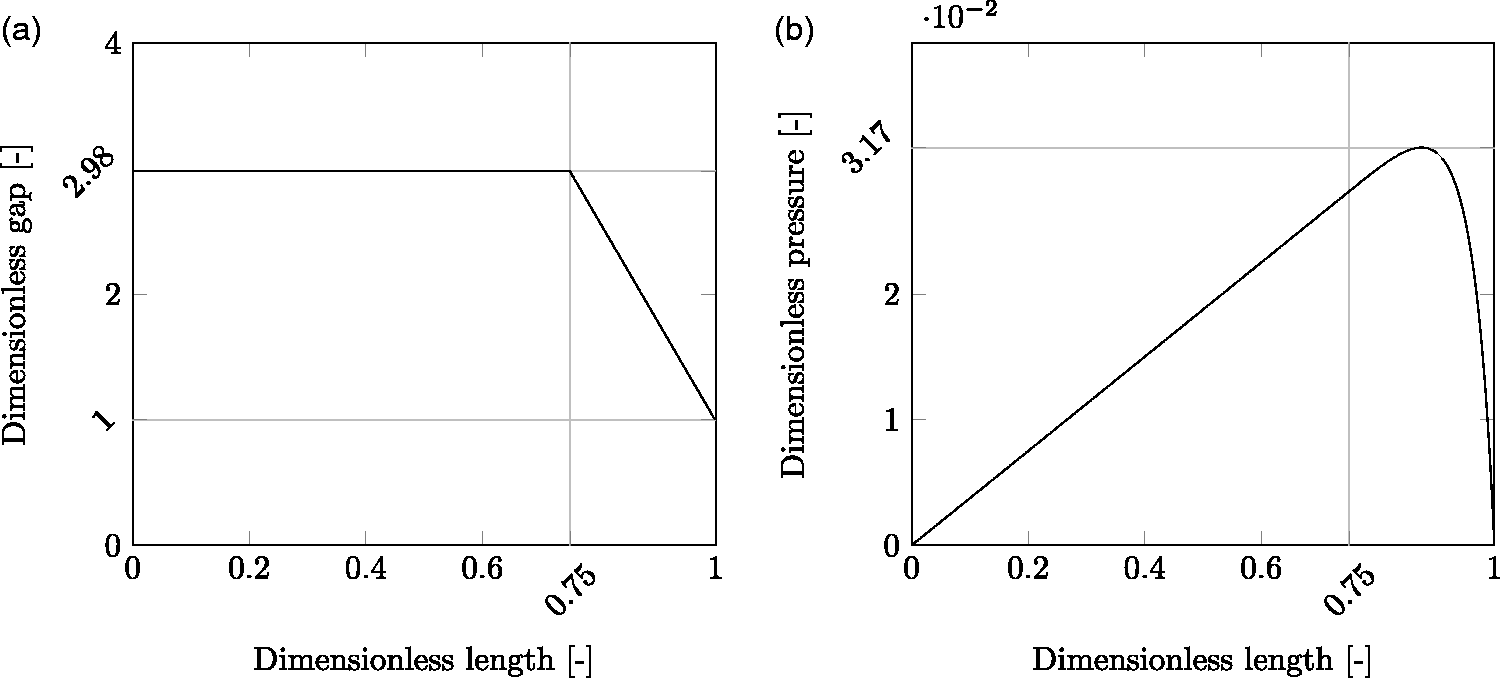
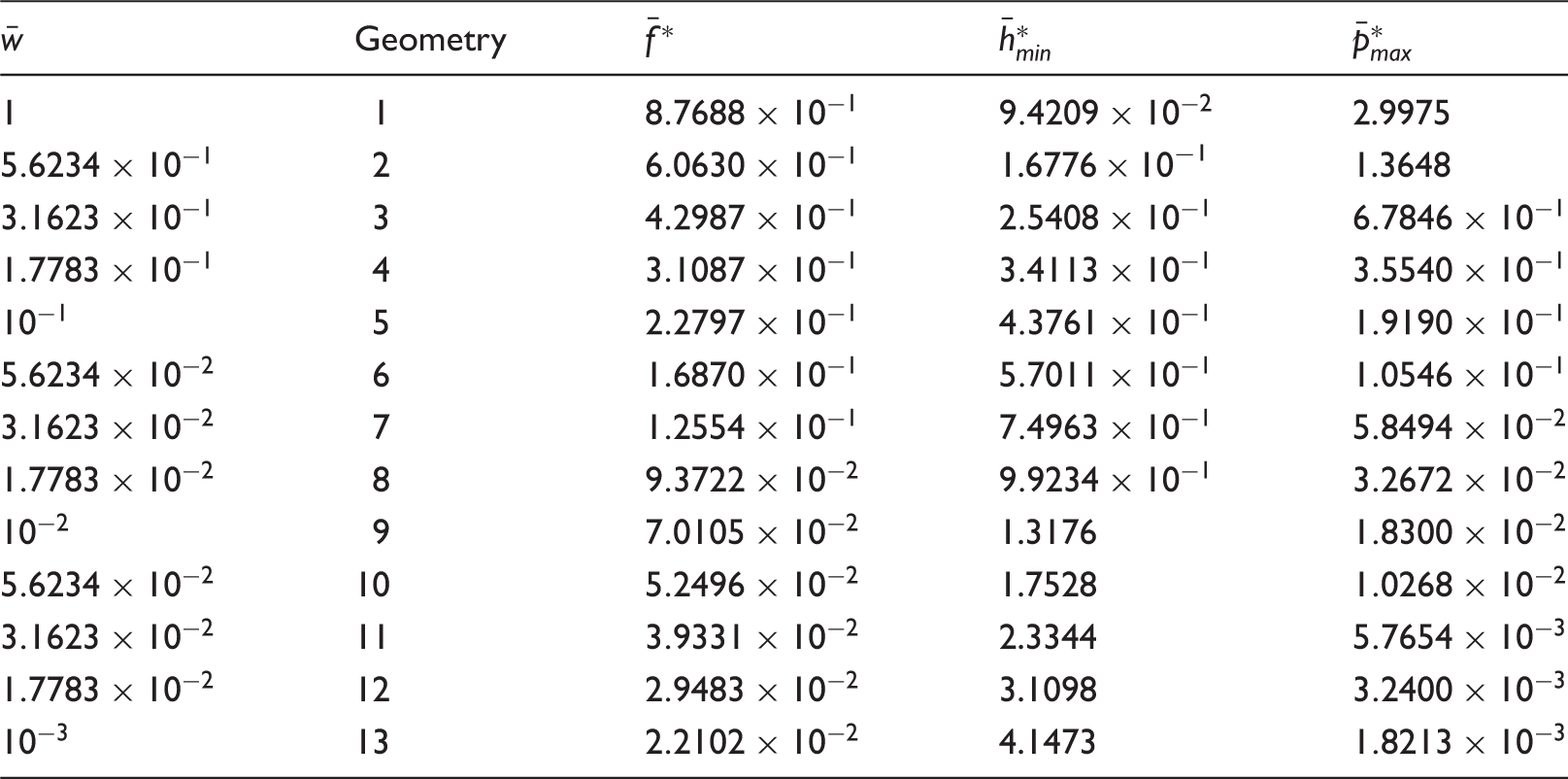
For the ideal gas model, an interpolation for the value of the dimensionless LCC in Table 2 should be made in order to obtain the bearing geometry from Figure 15 and the dimensionless values for friction force, minimum film thickness and maximum hydrodynamic pressure. Note that, as the LCC decreases, the geometry converges to a geometry closely resembling the one obtained for incompressible flow depicted in Figure 14.
The topologically optimised geometries and the corresponding dimensionless pressure distributions, obtained by minimising friction force for 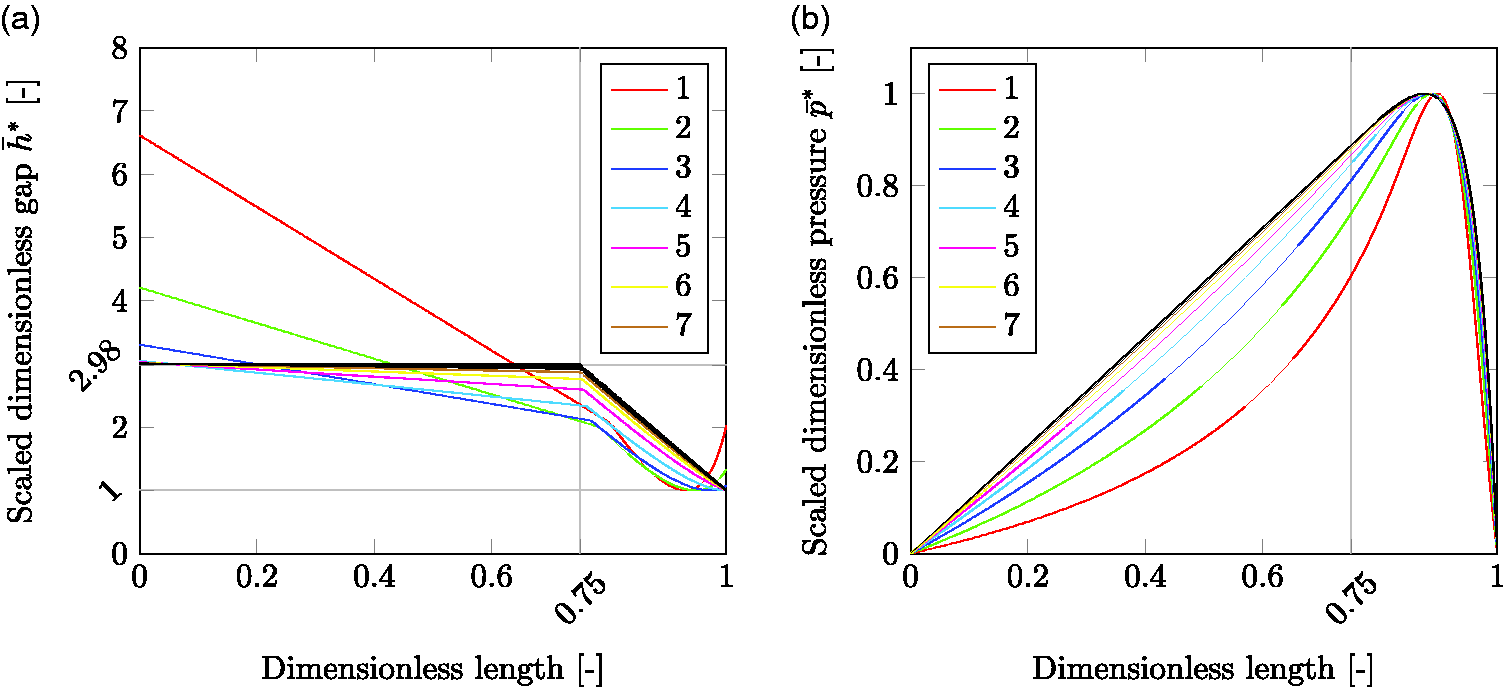
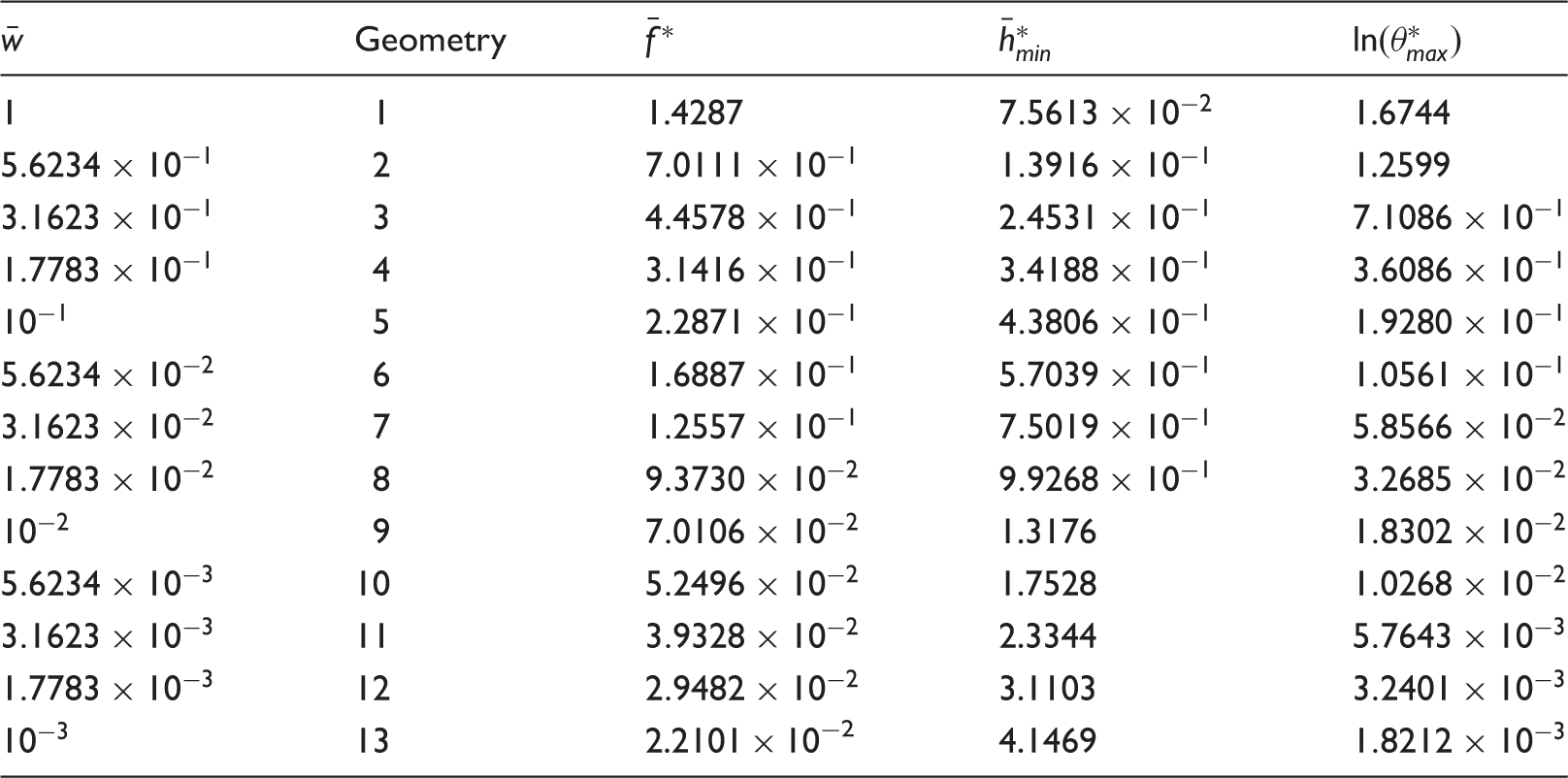
For a constant bulk modulus type of fluid, the procedure is the same as for ideal gas, except for that one should use Table 3 instead of Table 2 and Figure 16 instead of Figure 15.
The topologically optimised geometries and the corresponding dimensionless pressure distributions, obtained by minimising friction force for 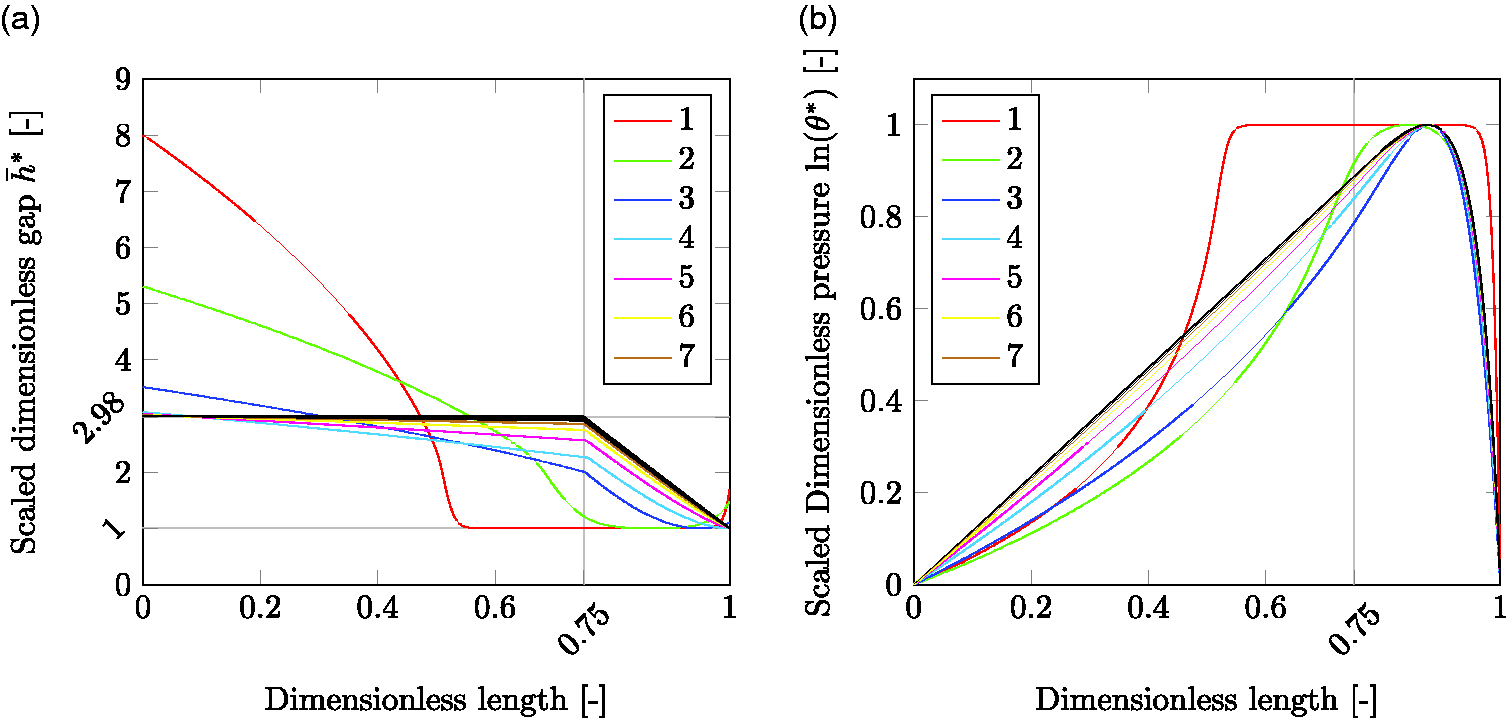
Lastly, the dimensionless values for the friction force, the minimum film thickness and the maximum hydrodynamic pressure obtained in Tables 1 to 3 will be used in equations (23) to (26) to calculate the performance values of the bearing.




To further extend the applicability of the results, the optimisation procedure for maximising the LCC for a given minimum film thickness was conducted for a range of different Γ-values, for the ideal gas model, and β-values, for the constant bulk modulus model. Thereafter, optimisation to minimise the friction force was performed without geometrical constraints, but instead with the constraint to retain the same LCC as for the corresponding LCC-optimised geometry. The results describe how much the coefficient of friction may be reduced, in comparison to the case when the LCC was maximised, and also how much the minimum film thickness reduces as a consequence of this. The results for the ideal gas model are shown in Figure 17, where both the film thickness and coefficient of friction reduction, in comparison to the results corresponding to the LCC-maximised bearing geometry are displayed as functions of the compressibility number Γ.
The reduction in film thickness and friction force for the friction force minimised bearing, in comparison to the LCC-maximised bearing, for the ideal gas model.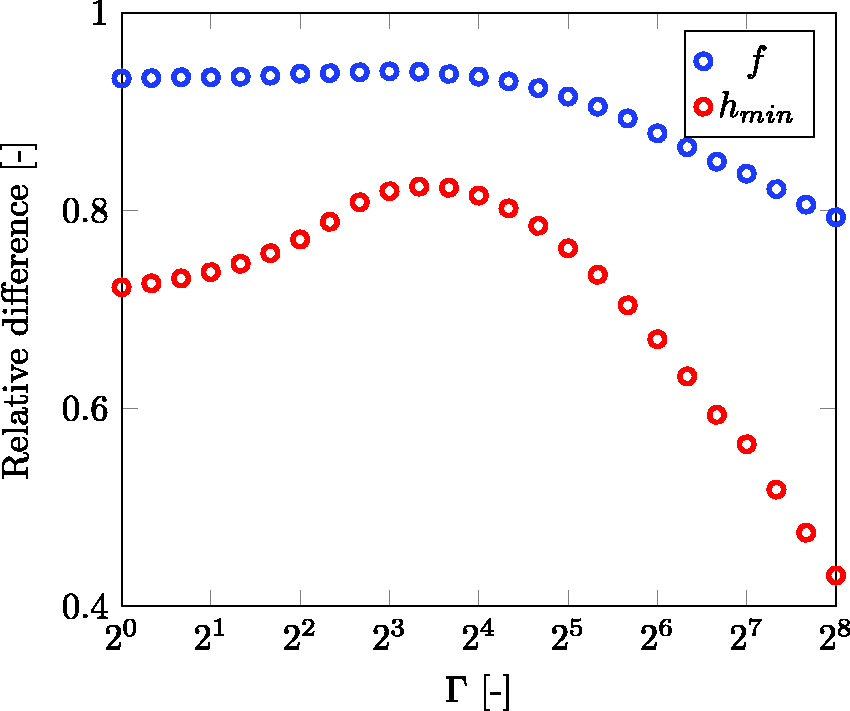
The results in Figure 17 show that the minimum film thickness has a markedly non-linear dependence of the Γ-parameter, with the smallest reduction of about 17%, occurring in the region
It can also be seen that for Γ-values larger than 24 or so, the friction reduction comes with greater and greater reduction of minimum film thickness. Put in other words, this suggests that in, e.g. a high-speed application – such as turbo machinery or dental drill, the friction force optimised geometry render a quite substantial increased risk of wear.
The result for the constant bulk modulus model is shown in Figure 18, where both the film thickness reduction and the friction force reduction are shown as a function of the value of the bulk modulus β.
The reduction in film thickness and friction force for the friction force minimised bearing, in comparison to the LCC-maximised bearing, for the constant bulk modulus model.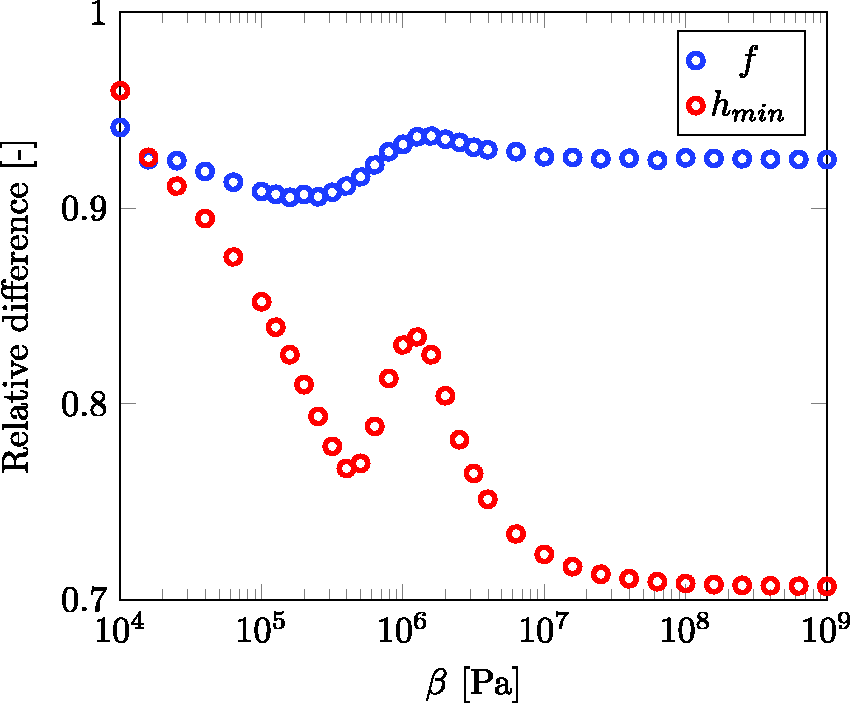
For the constant bulk modulus type of fluid, the friction reduction shows some variation when increasing the β-value up to about 107 Pa, after which the optimisation leads to more or less the same geometry as the one for an incompressible fluid.
From Figure 18, it can be seen that the minimum film thickness in this case also behaves highly non-linear. It is noteworthy that, as the fluid becomes more and more incompressible, the film thickness reduces and becomes nearly 30% thinner than the corresponding film thickness for the LCC-maximised geometry. However, the friction force is also smaller, about 7–8% of the one corresponding to the LCC-maximised geometry.
Concluding remarks
The bearing geometry for infinitely wide slider bearings was optimised for maximum LCC and later also for minimum coefficient of friction. The optimal geometries were obtained with the help of the Optimization Physics Interface in the FE-based simulation software COMSOL Multiphysics®. The topology optimisation setting that was used is based on the method of moving asymptotes. The resulting bearing geometries were verified against available results for incompressible fluids and ideal gases, as well as analytical results for fluids exhibiting compressibility of the constant bulk modulus type, 31 derived in parallel to the present work.
Mesh convergence studies were performed to verify that the optimisation method can be used to reproduce the LCC-maximising Rayleigh step bearing geometry for incompressible flow, 1 and the bearing geometry minimising the coefficient of friction as presented by Rohde. 17 Moreover, mesh convergence studies for ideal gas compressible flow were conducted to verify Maday’s results for LCC-maximisation 3 and then also for coefficient of friction minimisation.
The LCC-maximised bearing geometries, for the constant bulk modulus type of compressible fluids, consist of a novel contribution and complement the previously available results for incompressible fluids and ideal gases. They exhibit a convergent concave zone at the leading edge, instead the linear wedge that is optimal for ideal gases. For the LCC-optimised geometries, the concavity and the step that follows it moves closer towards the leading edge as the bulk modulus decreases. The step also becomes less pronounced and the bearing exhibits a longer land towards the trailing edge. For the coefficient of friction optimised geometries, a decreasing bulk modulus results in a smoother and smoother geometry, which also exhibits a divergent section towards the trailing edge, and the trailing land seem not to increase in size like it did for the LCC-optimised geometries.
When optimisation is performed for the minimisation of the coefficient of friction, the optimal bearing geometry, for the ideal gas model, is similar to the LCC-maximised one, but exhibit a tapered, instead of a vertical, step. Furthermore, as the Γ-parameter increases, a divergent gap appears at the trailing edge.
Using LCC optimisation as a part of the process in developing of hydrodynamic bearing designs would lead to better film forming capability, resulting in a thicker fluid film and better protection against wear. But also having the tool to optimise for the lowest possible friction force could reduce the power losses with at least 6%, without sacrificing too much of the film forming capability.
Footnotes
Acknowledgements
The authors would like to thank all the reviewers for their thorough perusal and valuable comments. They are especially grateful for the review by Prof Boldyrev, with his profound experience on the topic and that he chose not to be anonymous.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: We also want to acknowledge the financial support from the Swedish Research Council (Vetenskapsrådet), via the last authors’ project entitled New concepts in thin film flow modelling, with registration number 2014-4894.