
Abstract
The modelling uncertainties, external disturbance and actuator saturation issues will degrade the performance and even the safety of flight. To improve control performance, this study proposes an adaptive U-model based double sliding control (UDSMC) algorithm combined with a radial basis function neural network (RBFNN) for a nonlinear two-degrees-of-freedom (2-DOF) helicopter system. Firstly, the adaptive RBFNN is designed to approximate the system dynamics with unknown uncertainties. Furthermore, two adaptive laws are designed to deal with unknown external disturbances and actuator saturation errors. The global stability of the proposed helicopter control system is rigorously guaranteed by the Lyapunov stability analysis, realizing precise attitude tracking control. Finally, the comparative experiments with conventional SMC and adaptive SMC algorithms conducted on the Quanser Aero2 platform demonstrate the effectiveness and feasibility of the proposed 2-DOF helicopter control algorithm.
Keywords
1. Introduction
A helicopter is a type of vertical take-off and landing (VTOL) aircraft that offers greater hover stability and manoeuvrability than traditional fixed-wing aircraft. Due to its simpler take-off conditions and decent payload capacity, helicopter UAVs are attracting more and more attention from both industry and academia due to their wide range of applications in civil and military areas, including aerial photography, search and rescue missions (Li et al., 2023; Zhao et al., 2022b; Kim and Ahn, 2021). However, complex weather conditions and unpredicted changes in obstacles will affect the effectiveness and stability of the helicopter in actual flight missions, so the accuracy and robustness of the helicopter flight controller are crucial.
The control system design of a two-degree-of-freedom helicopter unmanned aerial vehicle (UAV) has a variety of challenging problems, including firmly couplings, highly nonlinear multi-input multi-output (MIMO) systems, internal parameter uncertainties, external environmental disturbances and actuator output saturation (Wu et al.,2022a; Sadala and Patre, 2018; Zhao et al., 2022a). To overcome these challenges, various control methods have been proposed for the control system design of helicopters, such as state feedback control (Kim and Yoo, 2021], proportional-integral-derivative (PID) based control (Garcia et al., 2012) and linear quadratic regulator (LQR) (Nkemdirim et al., 2022). However, these control techniques have limited performance against internal unmodelled dynamics and external environmental disturbances, and their control requires adaptive and robust control methods to achieve satisfactory performance. To overcome these limitations, sliding mode control (SMC) is proposed and considered to be an effective control method (Utkin et al., 2017; Shtessel and Edwards 2014). Once the sliding surface is reached, unmodelled dynamics, complex nonlinearity and external disturbances will not affect the system, so SMC has strong robustness. Accordingly, SMC method has been received a lot of research (Yang and Niu, 2023; Ye et al., 2022; Inomoto et al., 2022; Fei et al., 2022), which has been also applied into real-time industrial applications to deal with complex mechanical control issues effectively (Ahmed et al., 2022, 2022b; Dong et al., 2022; Zhang et al., 2023).
In recent years, numerous studies have introduced the application of SMC technology for 2-DOF helicopter attitude control, including the high-order sliding mode control of optimal attitude tracking control (Humaidi and Hasan, 2019), which combines high-order sliding mode technology and LQR and solves the identified problems of the system. Helicopter active fault-tolerant sliding mode controller for sensor faults, combined with fuzzy logic, real-time estimation of sensor faults and control system input compensation (Wang et al., 2020), learning-based helicopter trajectory tracking sliding mode control (Reyhanoglu et al., 2022; Zhang and Xian, 2021), etc. Although SMC can deal with system uncertainties and disturbances effectively, but their upper bounds must be known. However, it is usually difficult to obtain an accurate upper bound of disturbance in actual control. Therefore, adaptive SMC can be used to solve the problem that the upper limit of error interference is unknown. Recently, adaptive SMC has been received a lot of research, such as RBFNN based adaptive SMC (Feng et al., 2022), barrier function based adaptive SMC (Shao et al., 2022), adaptive SMC with hysteresis compensation-based neuroevolutionary (Son et al., 2022) and hybrid robust adaptive SMC (Milbradt et al., 2023). Zou et al. (2022) designed an adaptive second-order sliding mode observer to compensate for time-varying lumped disturbances, and proves finite-time global stability through Lyapunov stability theory. At the same time, the efficient nonlinear estimation and fitting characteristics of the neural network (NN) are widely used to deal with uncertain dynamic characteristics in the system model (Abiodun et al., 2018; He et al., 2015). The helicopter attitude sliding mode control algorithm with specified performance is designed using the neural network, and the NN estimation system is used. Unmodelled dynamics (Wu et al., 2022b), an adaptive neural network based fault-tolerant control method for 3-DOF helicopter systems is proposed to deal with unknown system modelling uncertainties, disturbances and actuator failures (Mokhtari et al., 2021), fast terminal sliding mode attitude tracking control for 2-DOF helicopter systems with an adaptive input compensation was proposed in Shen and Xu (2021), which solves the problem of input and output constraints of the helicopter system.
However, these works did not take into account the saturation effect of helicopter actuators. In order to protect the machine, actuator saturation (Zhu et al., 2011; Li and Lin, 2018; Bu et al., 2022) widely exists in practical industry control systems including helicopter control system. If it is not considered in the control system design, this will lead to poor flight performance of the helicopter, and the controller may even ‘kill’ the torque output of the actuator. Therefore, amount of advanced control algorithms have been proposed and developed to solve the actuator saturation problem. Ghaffari et al. (2022) introduced composite nonlinear feedback (CNF), combined with the super-twist sliding mode control method, to try to solve the problem of helicopter actuator saturation. In Zhu et al. (2023), a dual-loop control quadrotor position control algorithm based on conventional PID algorithm is proposed to deal with system state errors and actuator constraints. In the article (Guo et al., 2020), a control algorithm based on reverse thrust control that can stabilize a UAV with actuator saturation is proposed. Feng et al. used the radial basis function neural network (RBFNN) to compensate the helicopter system input saturation errors, but this study did not consider external disturbances. According to the above, although the research on the UAV control algorithm with system actuator output saturation has made great progress, the related research considering both control input saturation and disturbances is still not satisfying enough due to its unpredicted disturbances, complex nonlinear and strong coupling problems.
Meanwhile, the switching function used in the sliding mode algorithm leads to the ubiquitous chattering problems (Wu et al., 2022c; Feng et al., 2014; Wan et al., 2020; Soon et al.,2022), which together with unknown uncertainties and disturbances, actuator saturation, limit the real-time applications of sliding mode control in industry such as helicopters. To address these limitations, an adaptive control algorithm is proposed in this paper to develop an adaptive 2-DOF helicopter attitude control scheme with three update laws through the U-model-based adaptive dual sliding mode control (UDSMC) (Zhu et al., 2022) method and RBFNN, the first adaptive law is built for unknown unmodelled dynamics, the second adaptive solves the helicopter actuator saturation, and the last one is constructed for the unknown upper limit of external disturbances of the system. At the same time, the double-layer sliding structure of UDSMC effectively reduces the system vibration and improves the steady-state performance of the system. In summary, this study makes the following three main contributions. (1) Considering the unknown dynamics of the system, external environment disturbance and actuator saturation, an adaptive NN based control algorithm using the UDSMC is designed for a 2-DOF helicopter, and the stability of its closed-loop system is established through Lyapunov stability analysis. (2) The proposed control scheme consists of a decoupling algorithm, a baseline invariant controller to achieve the desired control performance, a DSMC-based dynamic inverter to achieve nonlinear dynamic cancellation and robustness and three adaptive laws to solve system control inputs saturation errors, external disturbances and NN approximated errors, which are well established in developing controllers without requirements of precise parameters and known upper boundary of the lumped disturbances. (3) To illustrate the superiority of the proposed control algorithm, we compare it with the conventional SMC and adaptive SMC (Zou et al., 2022) methods under different scenarios.
The organization of the rest sections are as follows: Section 2 discusses the dynamics modelling and control problems of a 2-DOF helicopter. Section 3 introduces the decoupling algorithm, extended MIMO UDSMC algorithm and the design procedure of the 2-DOF helicopter system, and its global stability is analyzed by Lyapunov stability theory. Section 4 sets up two experiments and discusses the comparative experimental simulation results between the proposed adaptive UDSMC, the conventional SMC and adaptive SMC (Zou et al., 2022) methods. Section 5 concludes this research.
2. Problem statement and preliminaries
2.1. Model of two-degrees-of-freedom helicopter system
Figure 1 shows the structure of a 2-DOF helicopter system (Reyhanoglu et al., 2022), where 2-DOF helicopter framework.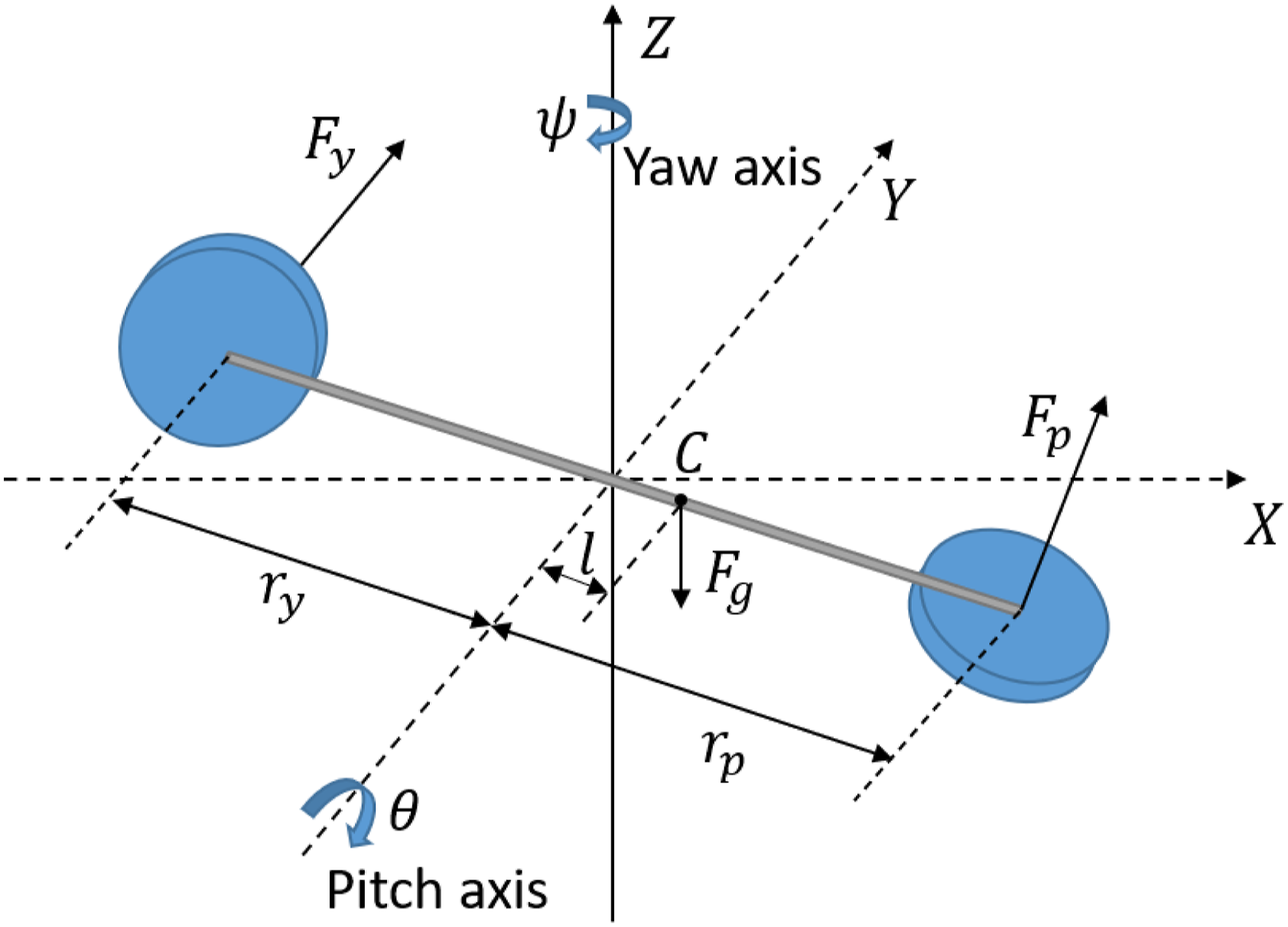

The external disturbance
2.2. Actuator saturation
The 2-DOF helicopter equips with two motors, and each motor will have saturation phenomenon because of physical limitations. Consequently, the relation of actual/saturated control input

3. Controller design
3.1. U-model based control
The U-model based control (U-control) enables the inversion of the controlled plant and the design of the baseline controller in dual feedback loops. The framework of the continuous-time (CT) U-control system (Li et al., 2020) is depicted in Figure 2. In U-control, the inner loop is the dynamic inversion design of the plant to nullify the system nonlinearities and dynamics (Li et al., 2021a, 2022). This process converts the controlled plant into an identity matrix or unit constant combined with its inversion. Subsequently, the output of the U-control system is obtained as follows: U-model based control system design framework.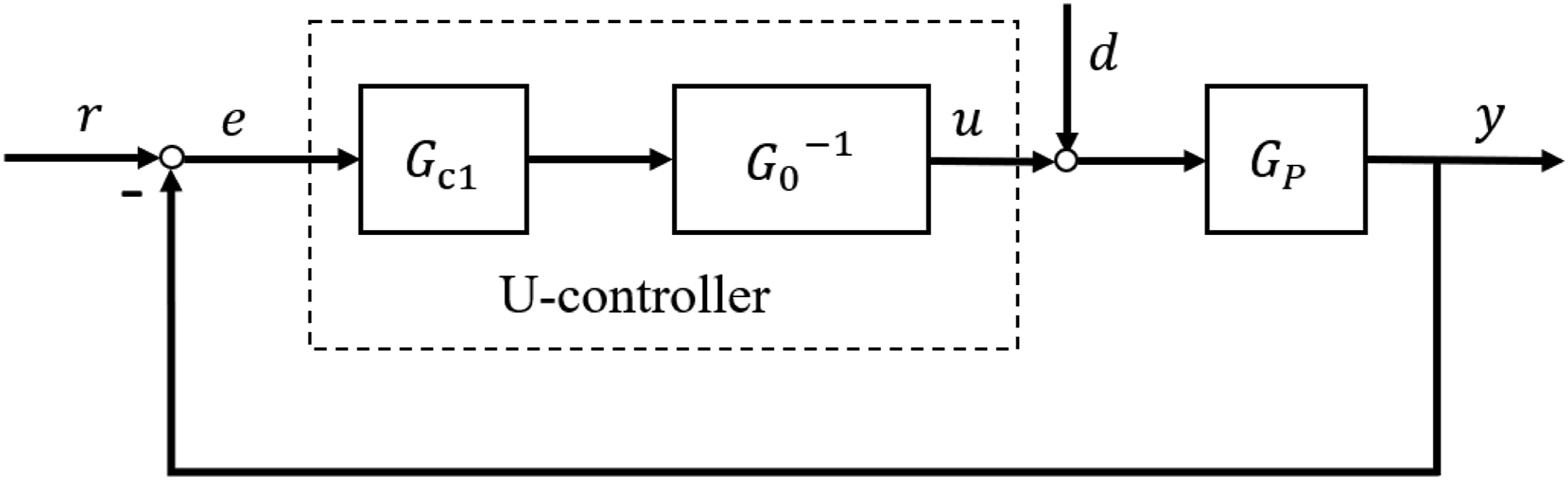


Specifically,
The application of inversion necessitates the controlled plant to be Bounded Input and Bounded Output (BIBO) stable and to have no unstable zero dynamics. Upon solving for the highest-order derivatives of the system input
3.2. U-model based double sliding control
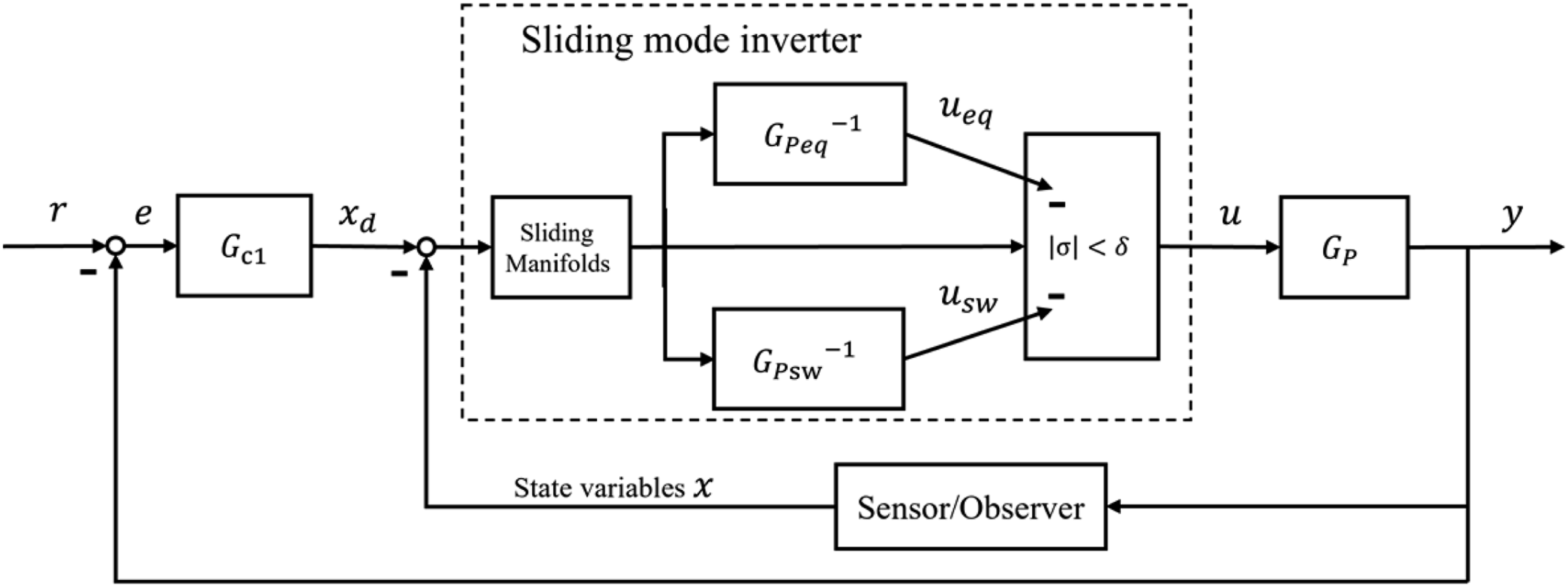
In Section 3.1, the fundamental concept of the U-control system is presented (Li et al., 2020). The original U-inverter is sensitive to the precision of the system model, which can lead to less-than-optimal control performance in real-time control applications (Li et al., 2021b). To overcome this issue, UDSMC adopts the DSMC approach to obtain a robust dynamic inverter (1) Design a global sliding surface, denoted as (2) Design a switching controller (3) Design a local sliding surface (4) Design an invariant controller Design framework of UDSMC.
It should be emphasized that the dynamic inversion of the controlled plant should exist and satisfy the globally consistent Lipschitz continuity (Zhu et al., 2022):
3.3. Model transformation
Let
Choose desired tracking signal as
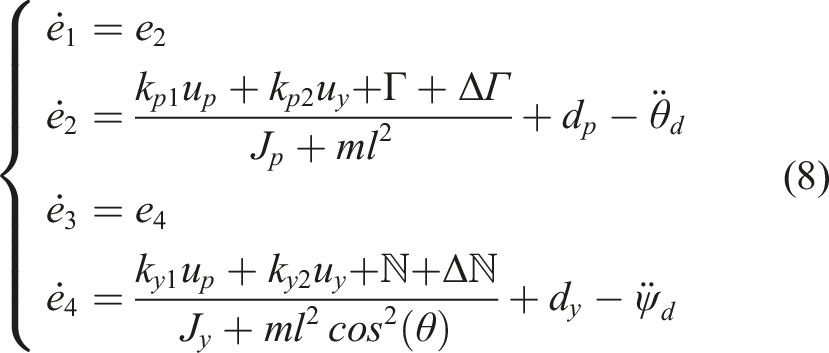
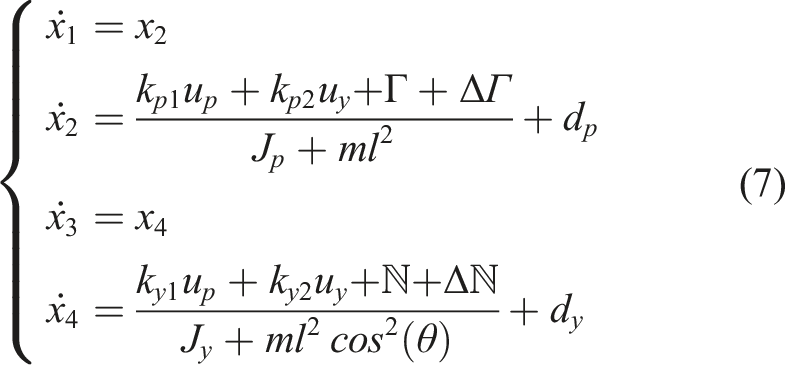
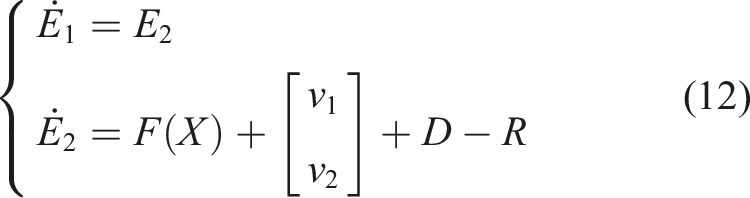
In this study, the trajectory For simplification, equations (7) and (8) can be rewritten as For decoupling of system (7), let Substituting above conversion into equation (11), it becomes In such case, the coupling system presented in (7) can be converted into decoupling system in (12).



3.4. Adaptive inverter design
According to Section 3.2, it can be observed that the upper boundaries of system neglected terms (including system dynamics and disturbances) are required for controller design, which is hard to obtain in practical application control system. Additionally, overestimating such boundaries can lead to excessive controller gains, resulting in chattering and control inputs saturation issues. Therefore, this section proposes an adaptive DSM inverter using RBFNN to estimate/approximate the system dynamics and three adaptive laws to solve the problems caused by external system disturbances and control input saturation. The adaptive UDSMC framework is shown in Figure 4, where Adaptive UDSMC framework.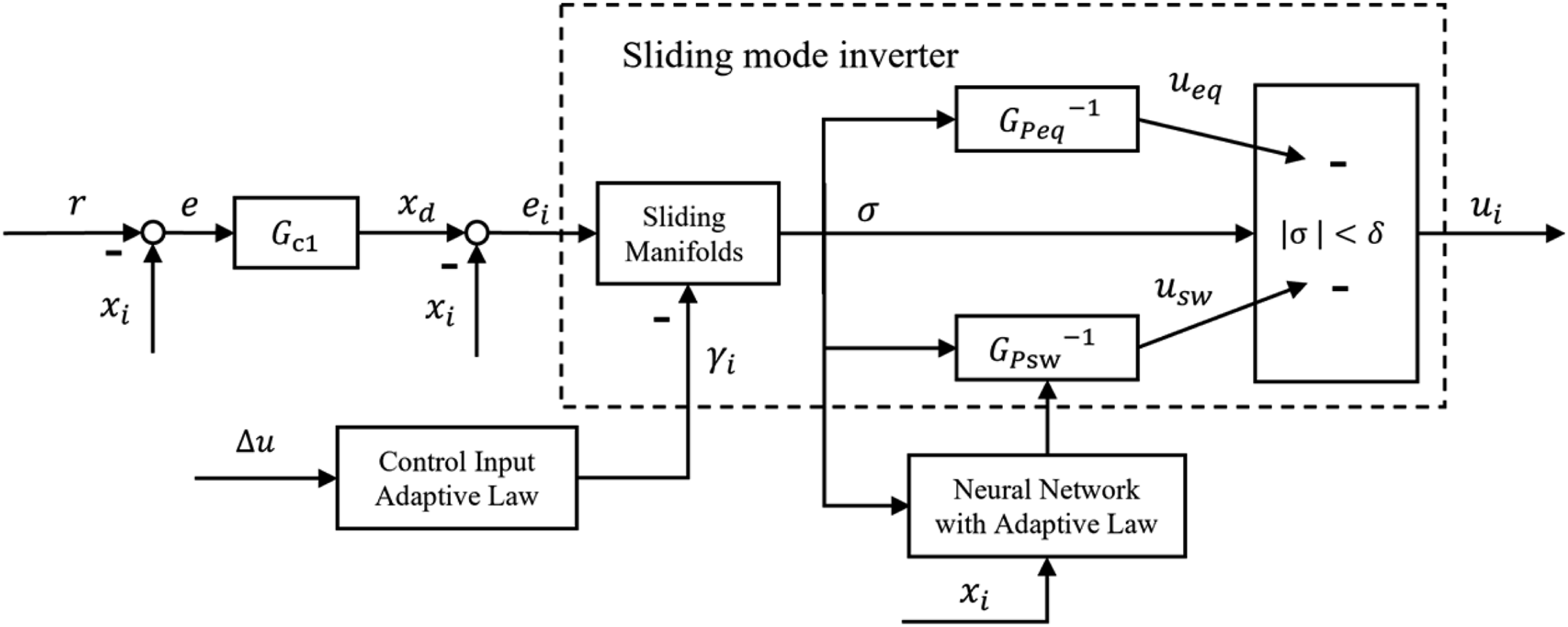
Comparing Figures 4 and 3, the sliding mode inverter presented in dashed area is not changed. However, NN and control input auxiliary system with adaptive law are introduced into UDSMC system to update the control gain and the design of sliding surface described in Section 3.2. To illustrate such adaptive UDSMC design principles, define the unknown functions as


Then design the first adaptive controller auxiliary law for control inputs saturation as:


Accordingly, the derivative of equation (17) can be calculated as

Also, the local candidate Lyapunov function is chosen as

Design the second NN approximated adaptive law for system dynamics and modelling uncertainties as

Substituting equation (22) into equation (21), it has

Then introduce an accessorial variable as

Substituting equation (24) into equation (23), it has
According to

Accordingly, substituting (26) into (25), it has

Then the control inputs are therefore designed as


To satisfy

In such case, the stability of control system holds. Substituting
The modelling uncertainty of the system has been considered in (7) as
In this proposed control algorithm, the RBF is established to deal with the uncertain system dynamics; therefore, the precise parameter is not required for controller’s design. Also, the upper bounds of the external disturbances caused by complex environment are not required because of the three adaptive laws, thereby avoiding the overestimation of the switching gain. Eventually, the proper switching gain and double-sliding structure reduce the control chattering issue efficiently.
4. Experimental simulation
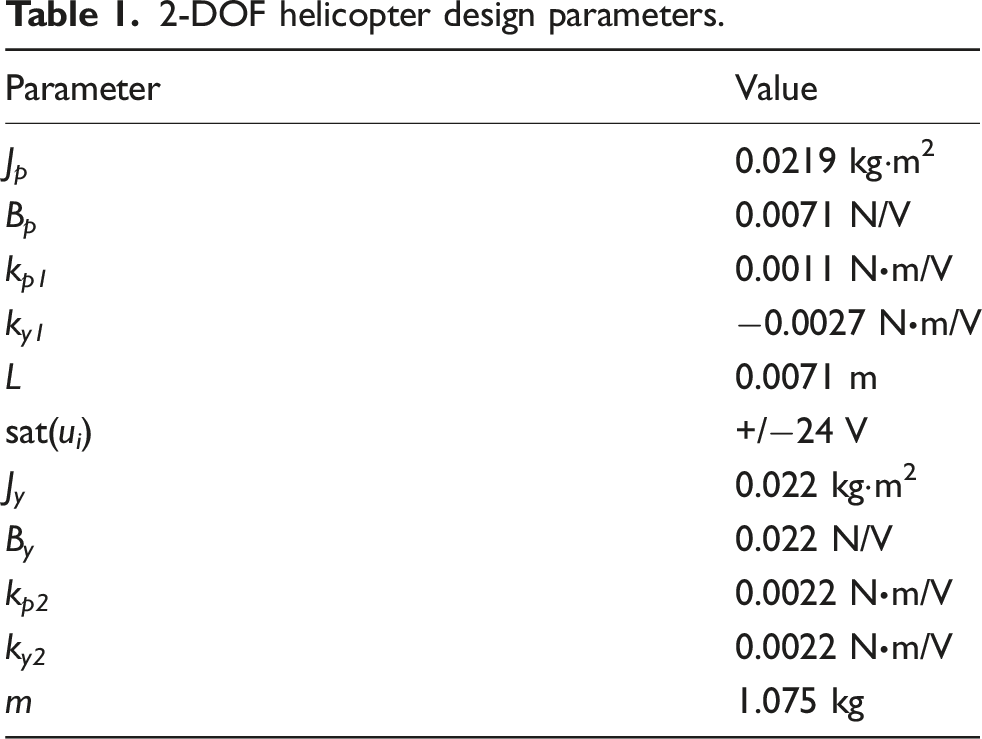
To demonstrate the validity and effectiveness of the proposed control algorithm, comparative experiments of the proposed control system, SMC system and adaptive SMC system are established on a 2-DOF helicopter platform (Quanser Aero2) shown in Figure 5. The specific parameters of the 2-DOF helicopter model are presented in Table 1. The adaptive SMC and conventional SMC design procedures are proposed as follows refers to the paper (Zou et al., 2022). Quanser Aero2 experimental platform. 2-DOF helicopter design parameters.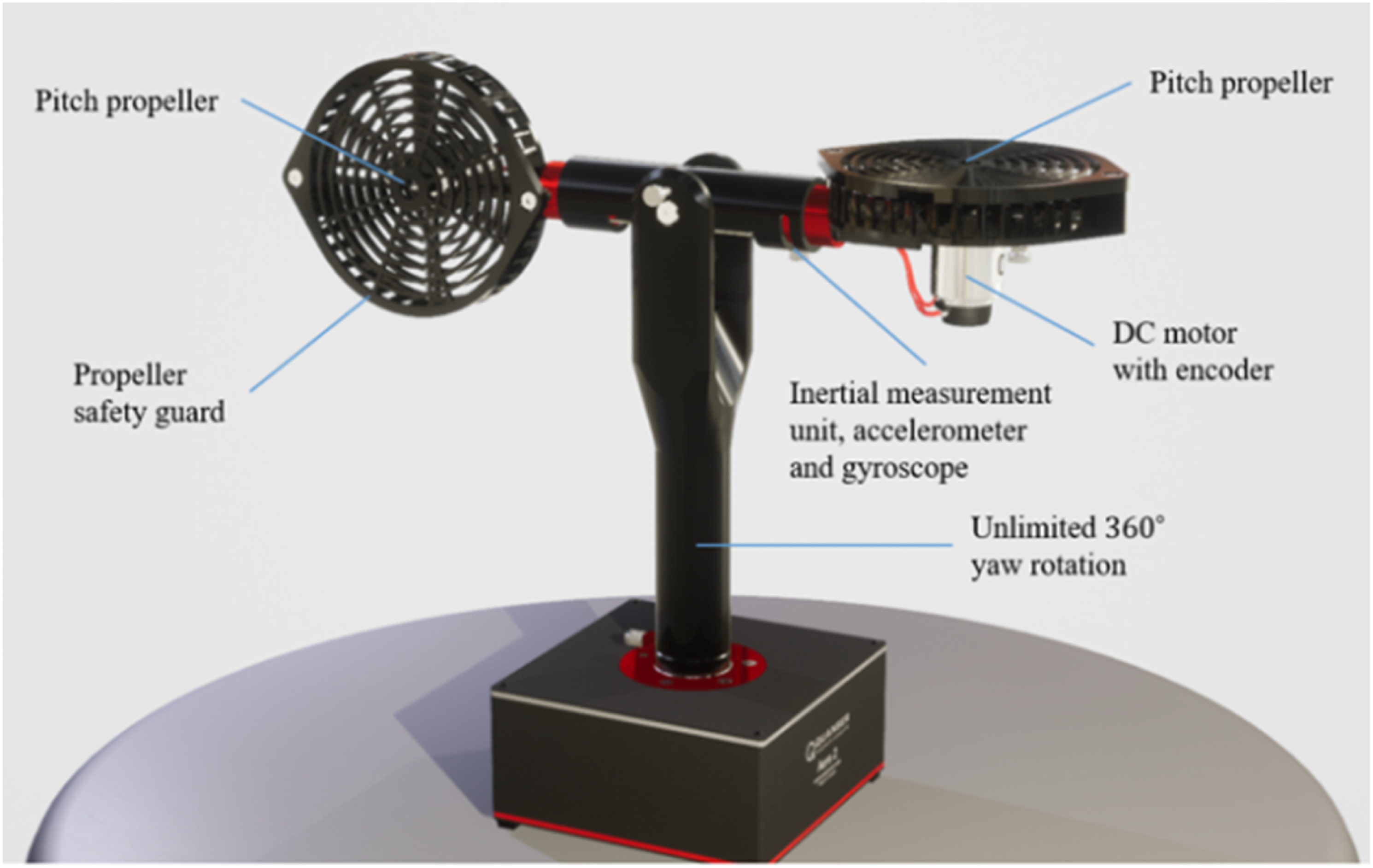
The compared SMC and adaptive SMC algorithms design procedures are shown as follows. According to model (1), let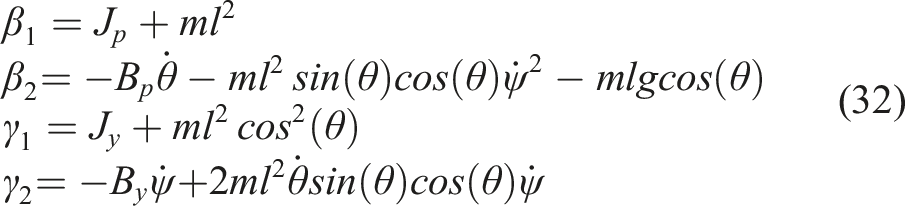
Then the model (1) can be converted to as follows:


Then the adaptive SMC proposed in Zou et al. (2022) used RBFNN to approximate the dynamics 

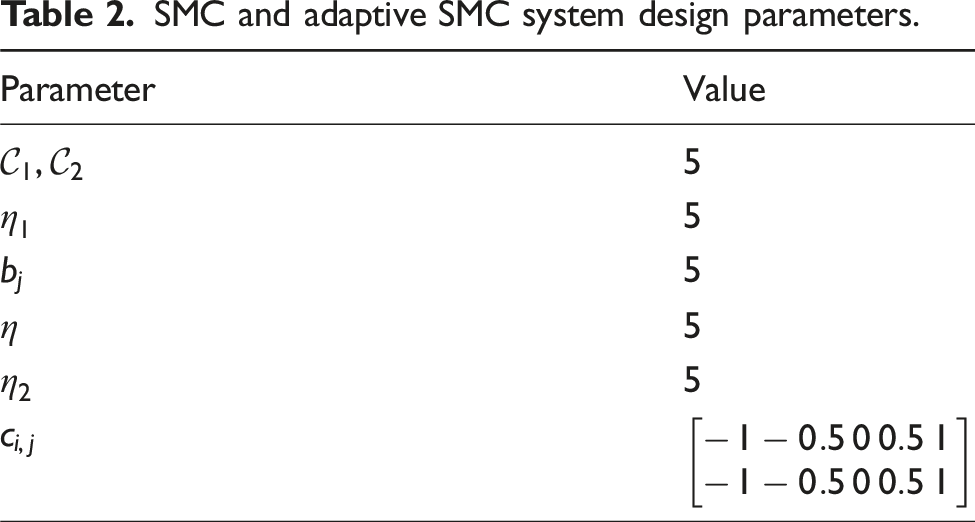
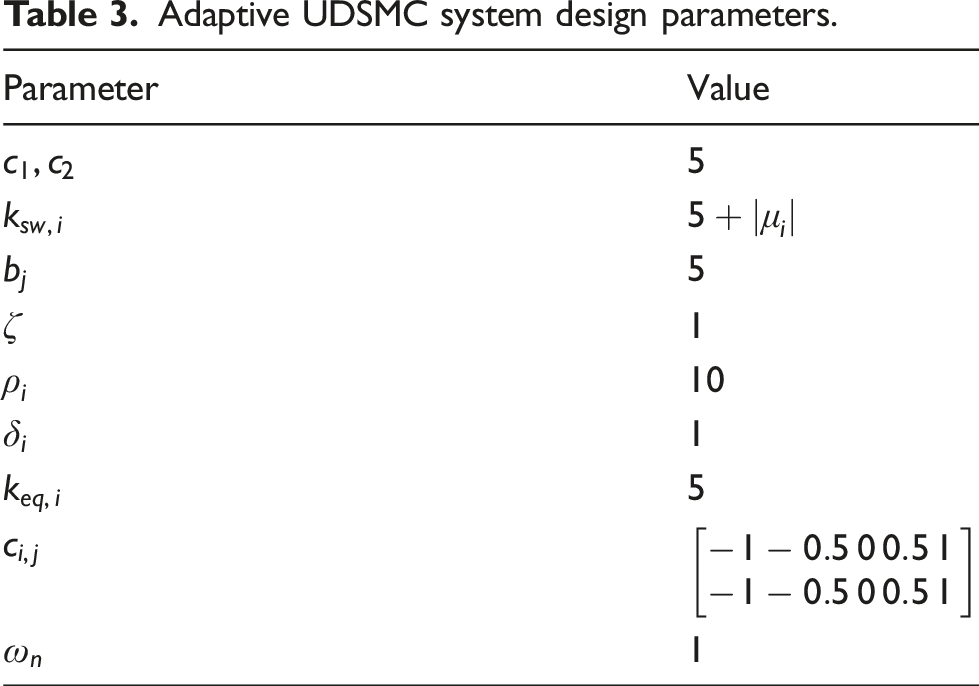
In the experimental simulation, the initial helicopter states are chosen as UDSMC control system framework for 2-DOF helicopter. SMC and adaptive SMC system design parameters. Adaptive UDSMC system design parameters.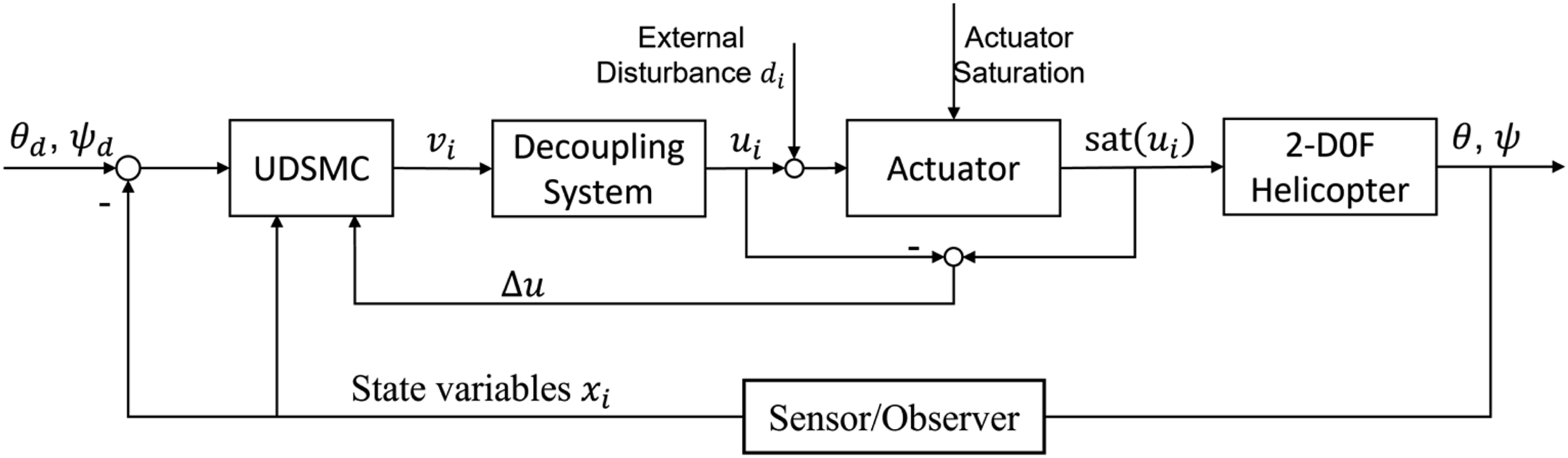
The problem of actuator saturation in practical engineering applications is to limit the actuator output to prevent the actuator from being overloaded and causing damage. This study also considers actuator saturation issue, which will affect system response and tracking control performance but will not affect controller stability.
4.1. Case 1: attitude tracking control
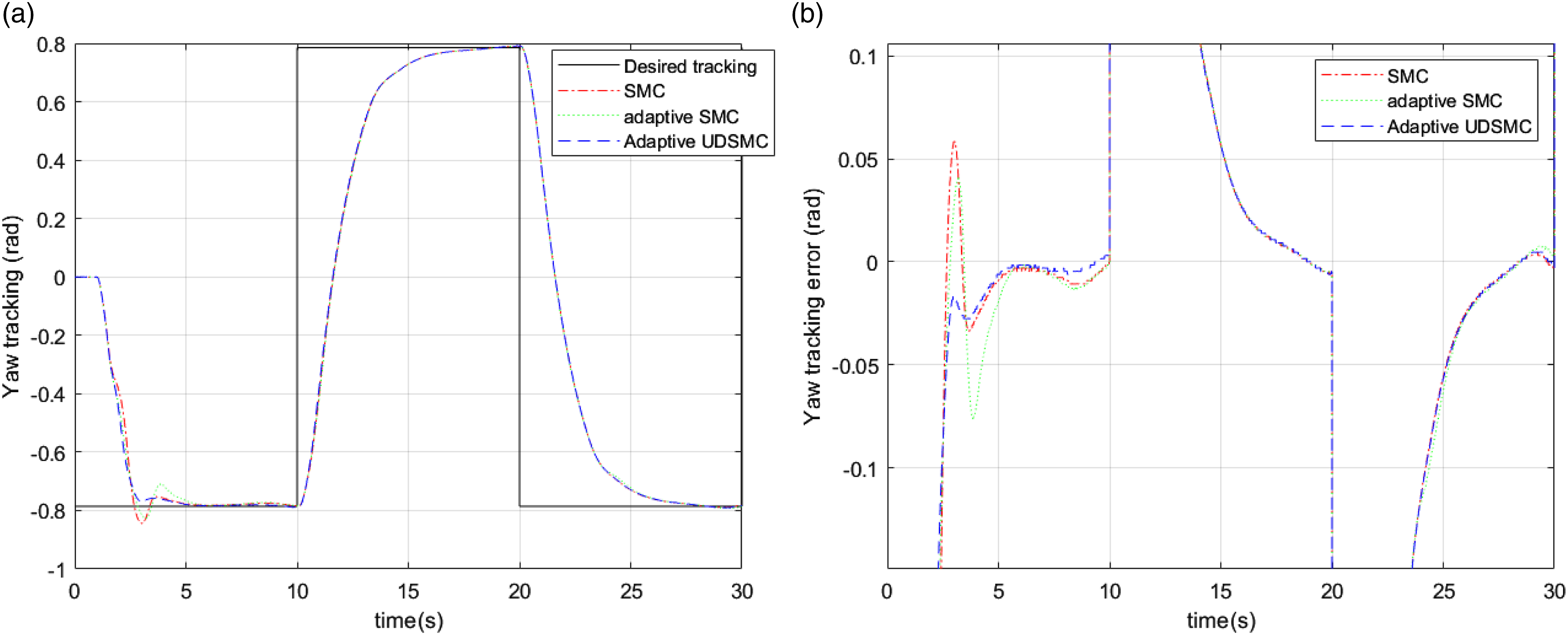
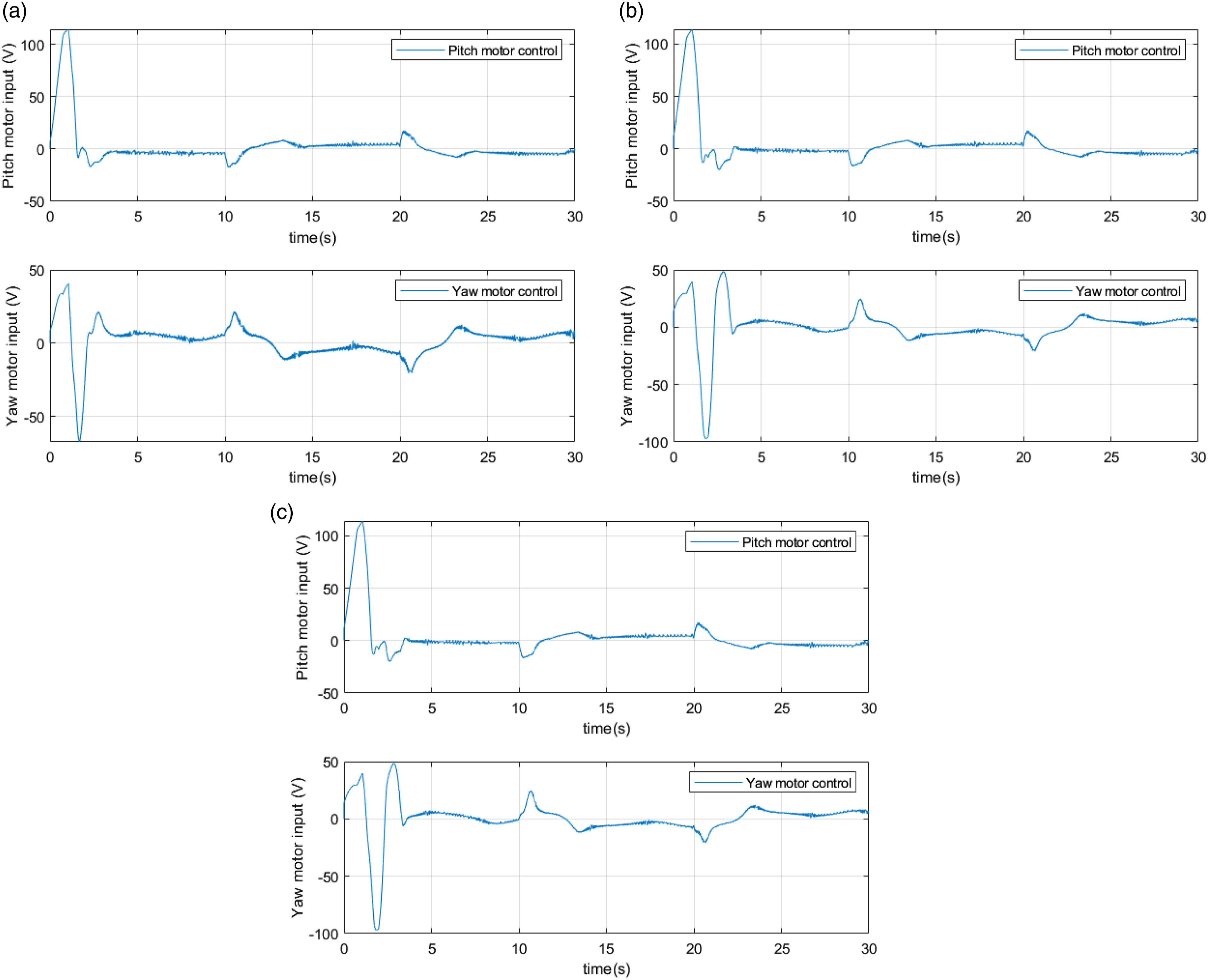
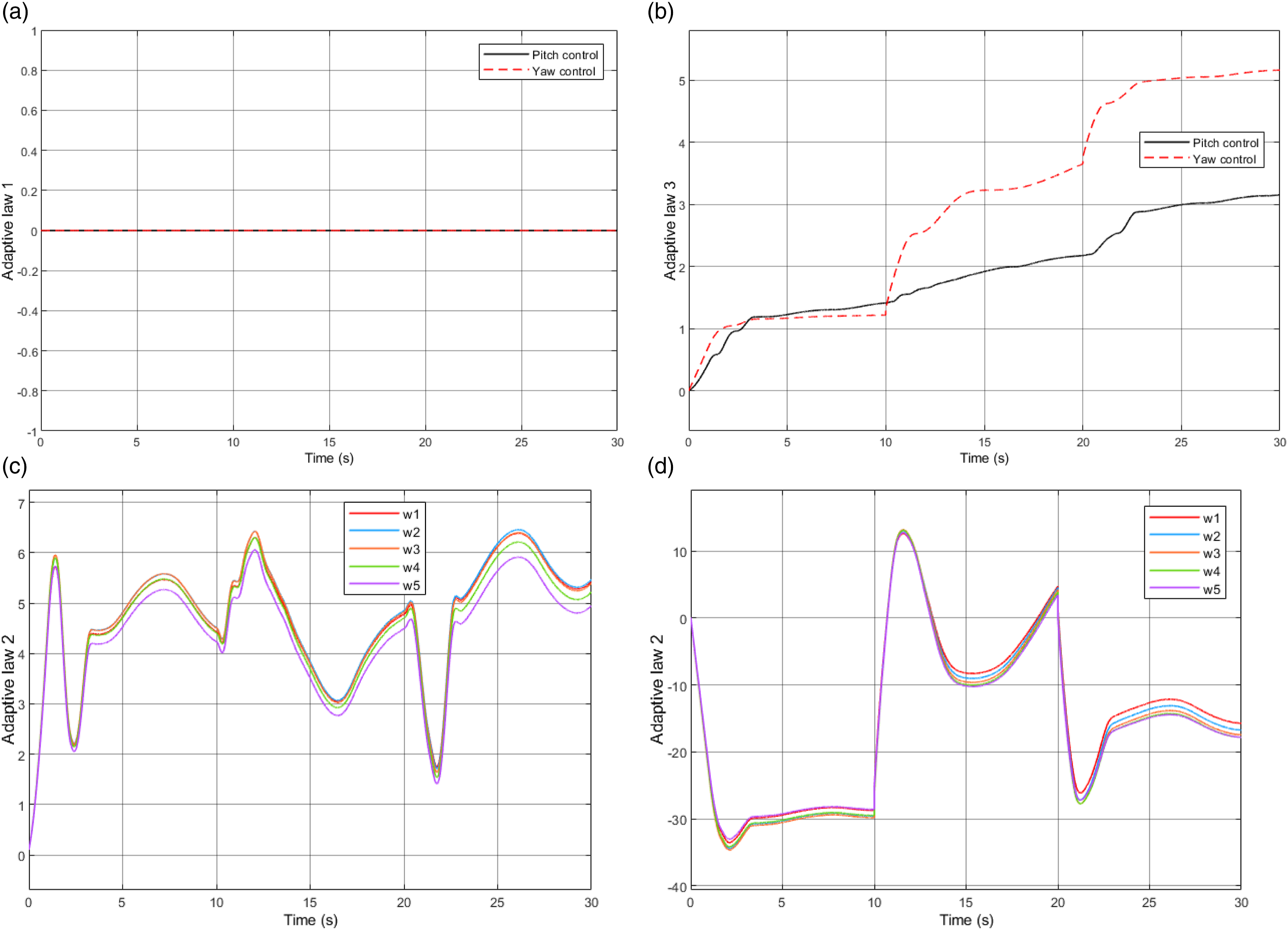
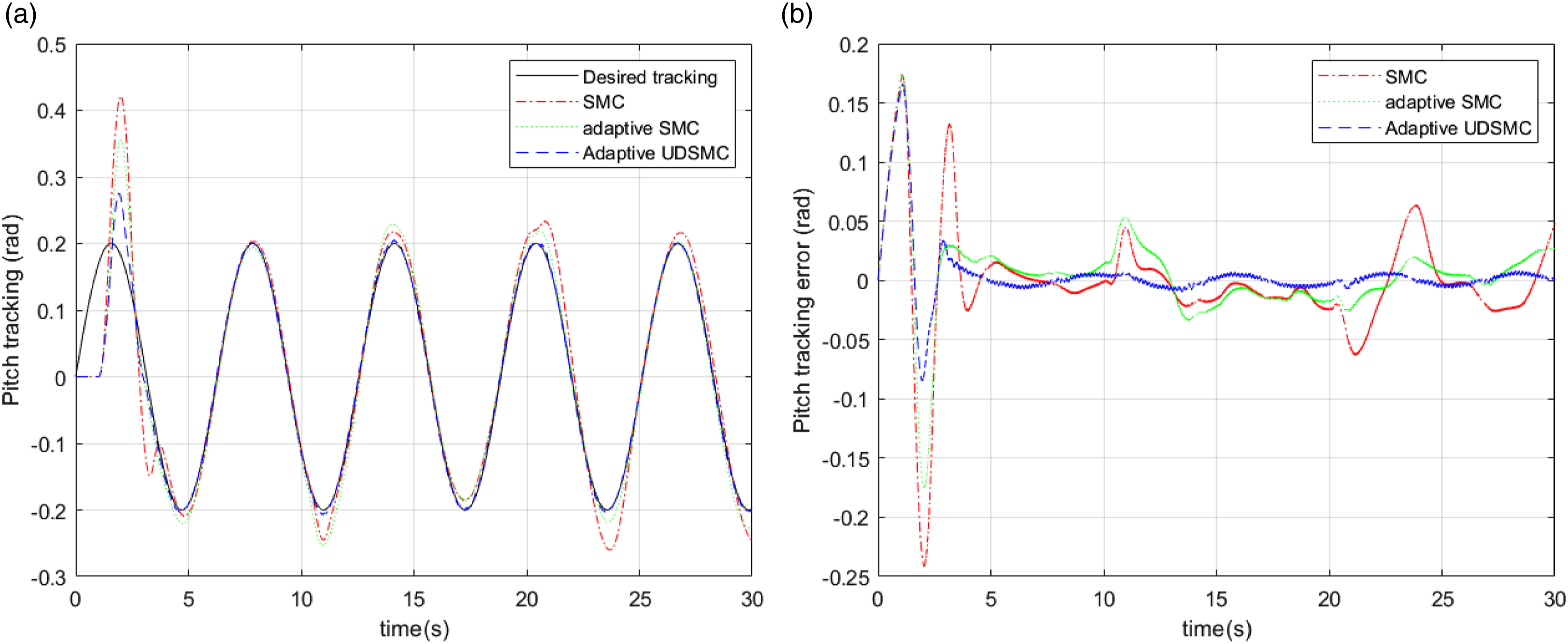
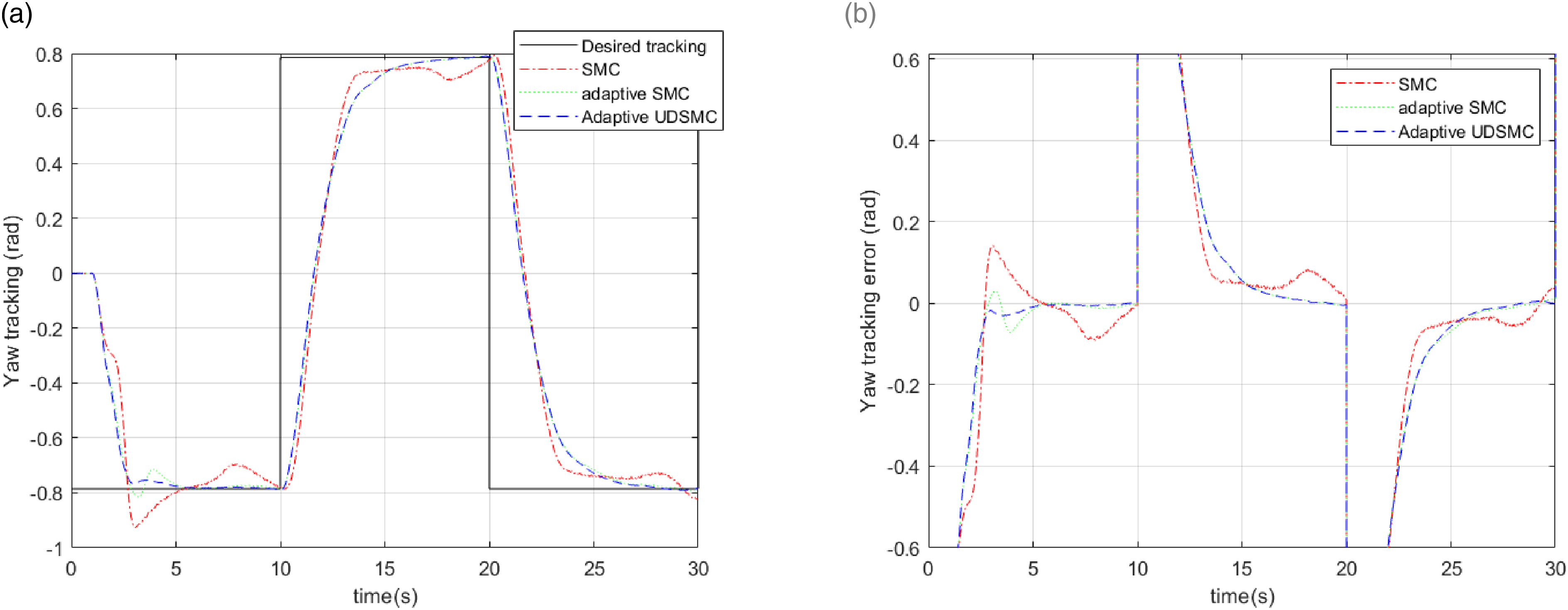
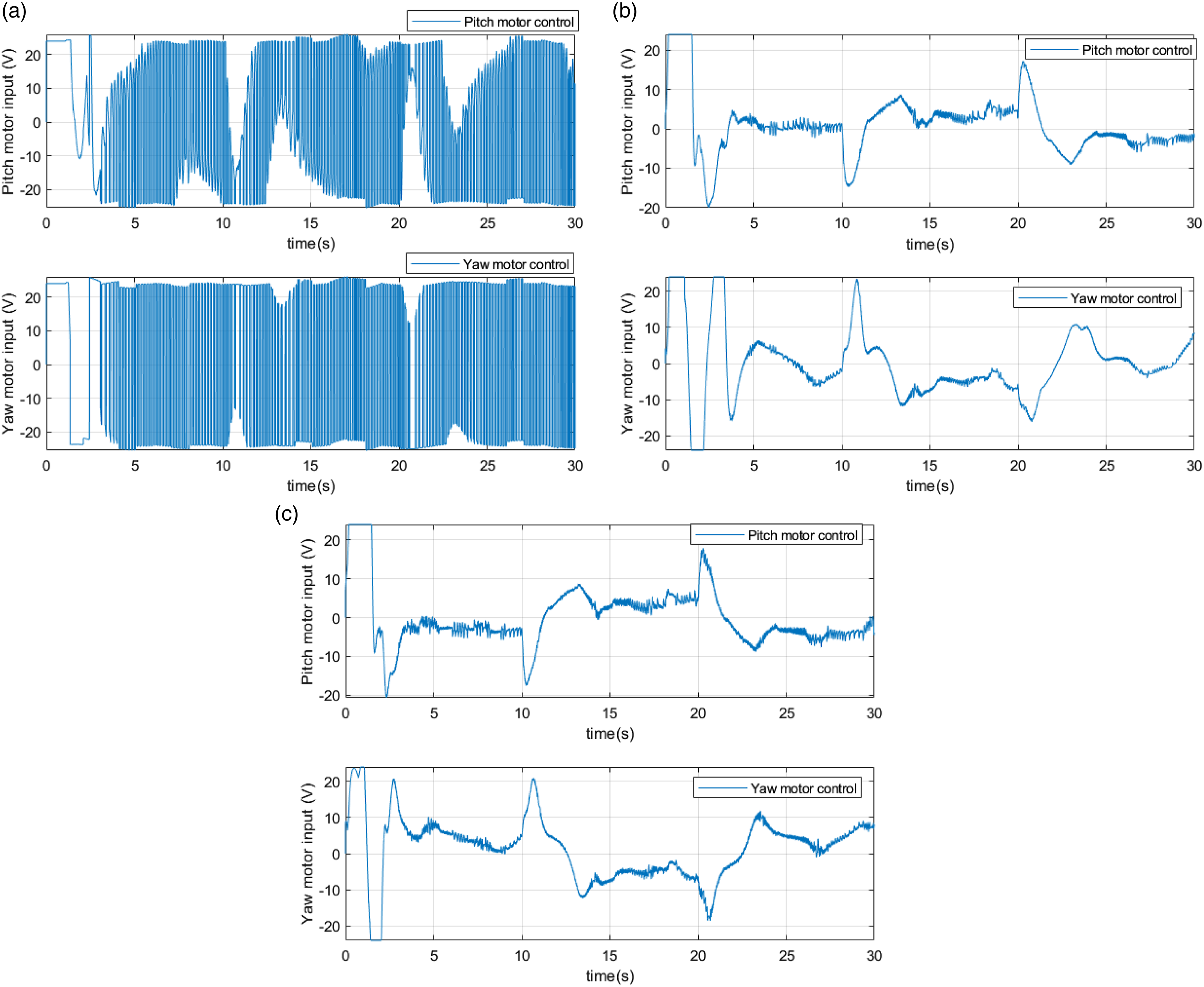
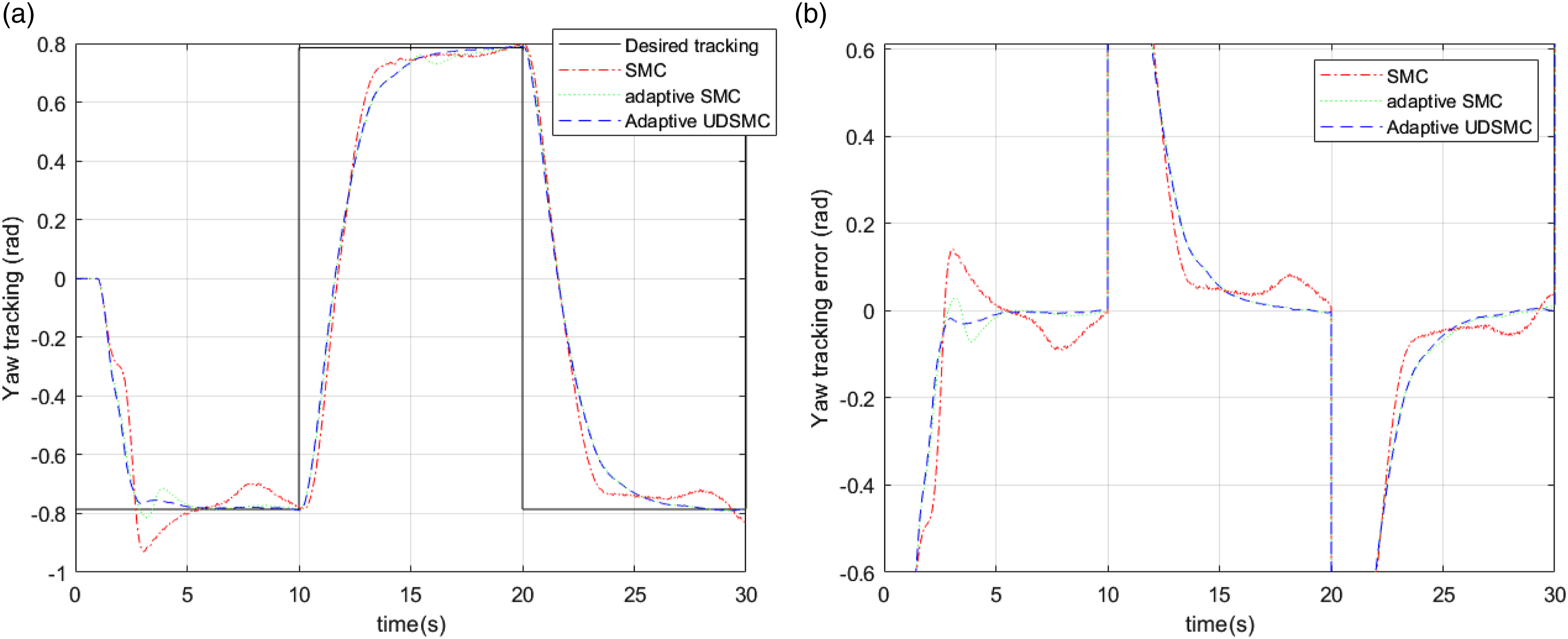
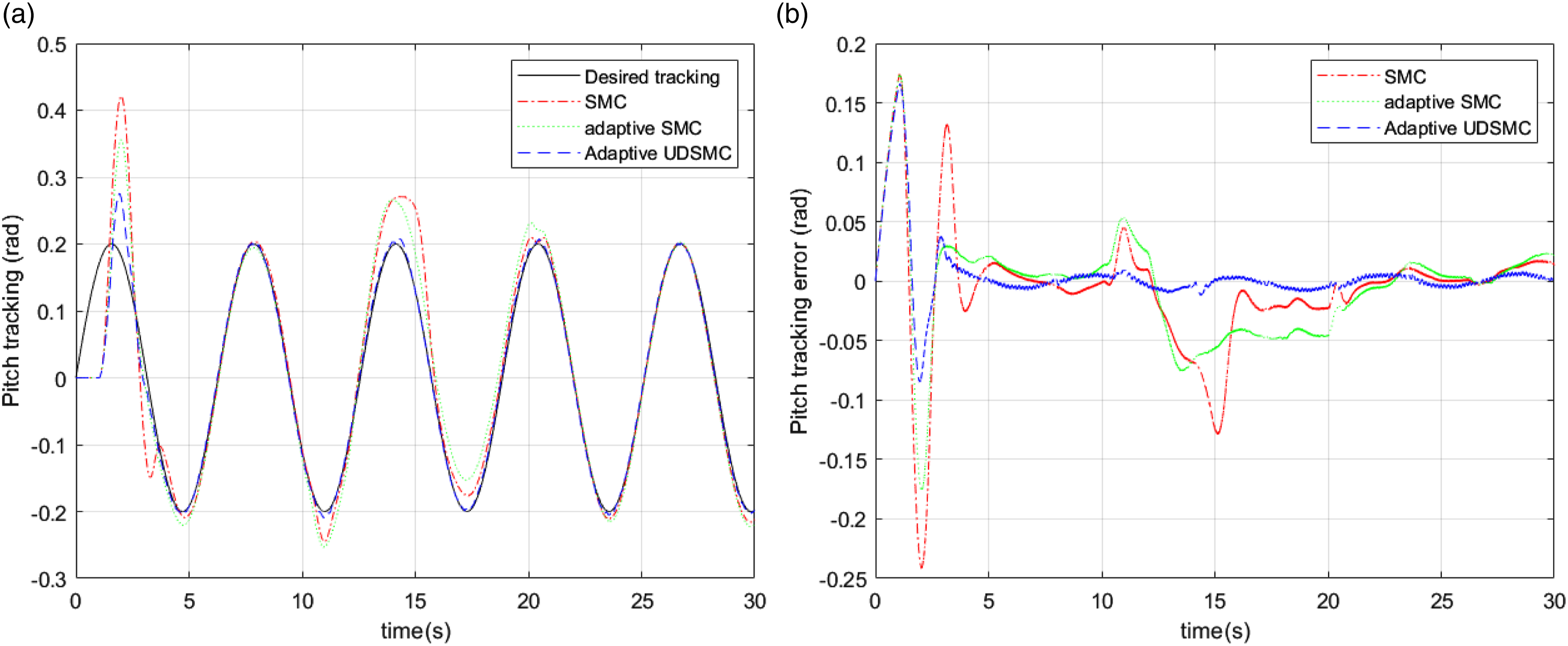
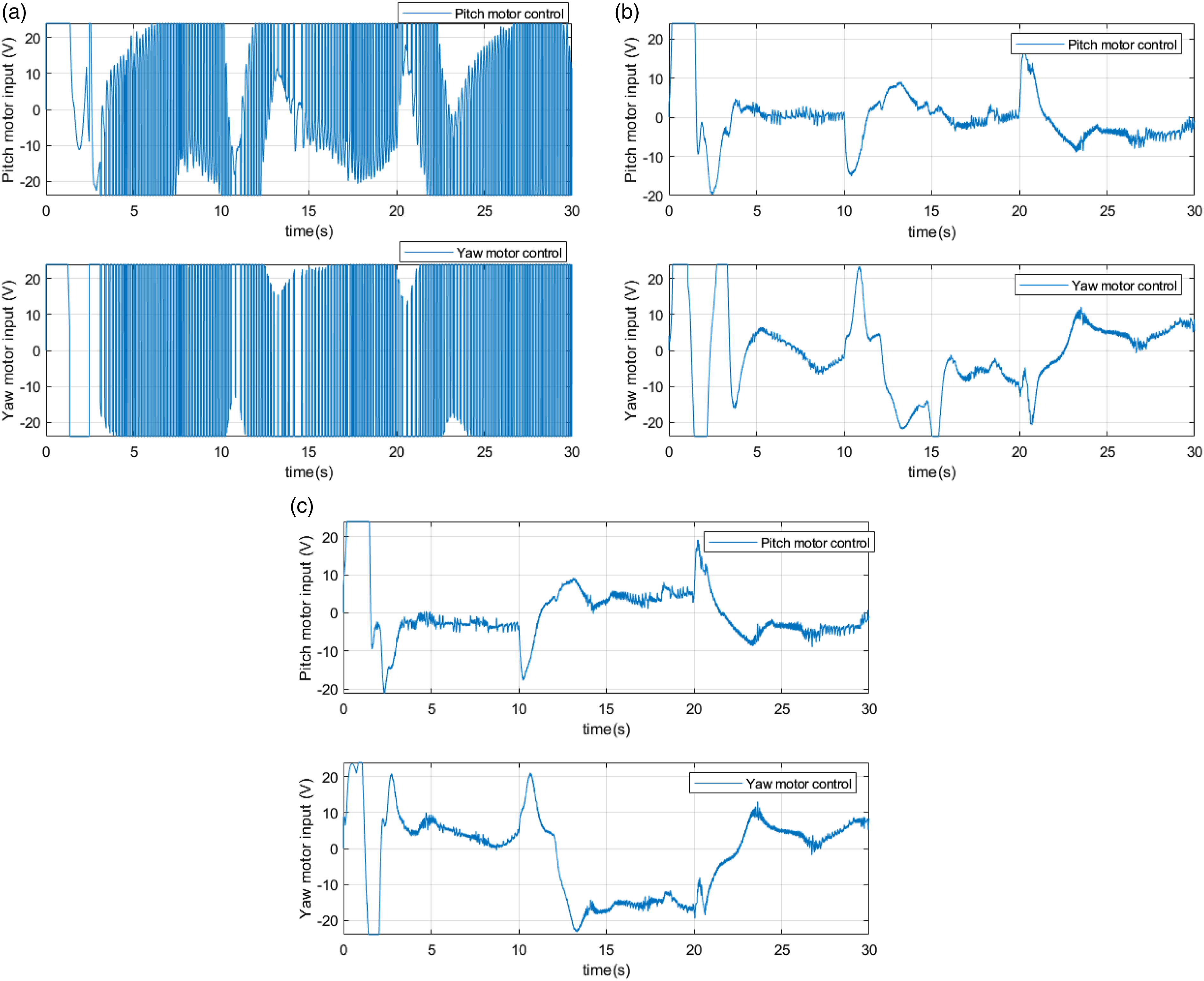
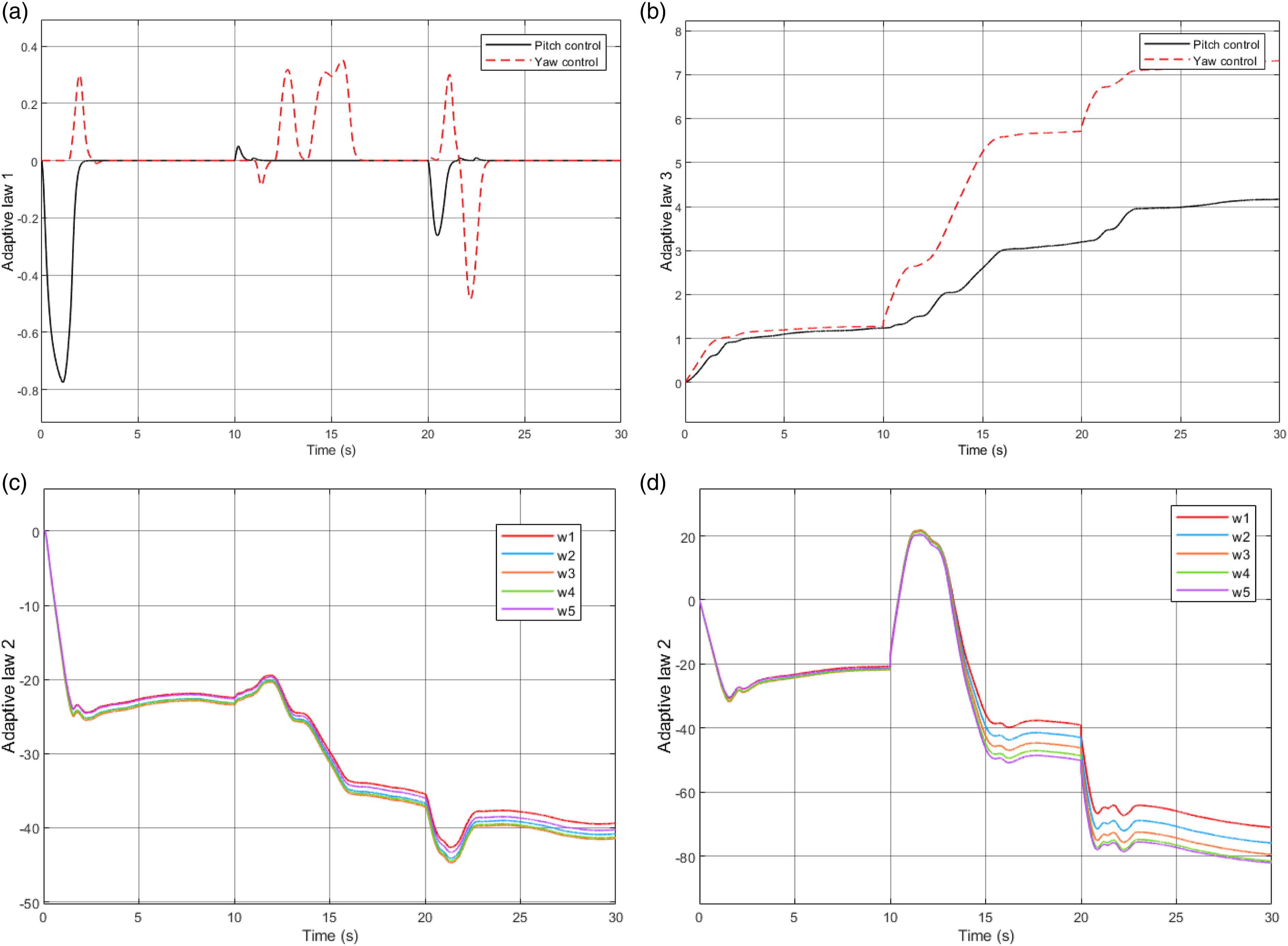
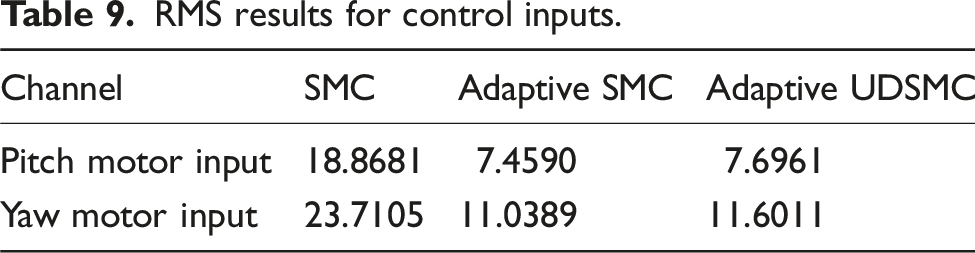
Figures 7–10 show the compared experimental results between the proposed adaptive UDSMC algorithm, SMC and adaptive SMC algorithms. In Figure 7, it can be observed that the adaptive UDSMC and adaptive SMC systems demonstrate better pitch angle tracking performance, exhibiting reduced overshoot and smaller tracking error. Similarly, in Figure 8, the adaptive UDSMC and adaptive SMC systems outperform the SMC system in terms of yaw angle tracking performance, showing decreased overshoot and smaller tracking error. From Figure 9, slight chattering can be observed from three SMC based control systems because unmodelled dynamics, helicopter mechanical vibration and sample period. Figure 10 shows the adaptive laws designed in adaptive UDSMC. Because Case 1 is free of control input saturation, adaptive law 1 equals 1, that is, has not been activated (from Figure 10(a)). Figure 10(c) and (d) show trends of adaptive law 2, which are weights for RBFNN. The adaptive law 2 varies with system following attitude and dynamics, therefore, the adaptive parameters in adaptive UDSMC are also adaptive. Pitch tracking comparison of SMC, adaptive SMC and adaptive UDSMC in Case 1 between (a) pitch angle tracking and (b) pitch tracking errors. Yaw tracking comparison of SMC, adaptive SMC and adaptive UDSMC in Case 1 between (a) yaw angle tracking and (b) yaw tracking errors. Comparison of control inputs in pitch and yaw motors in Case 1 between (a) SMC and (b) adaptive SMC and (c) adaptive UDSMC.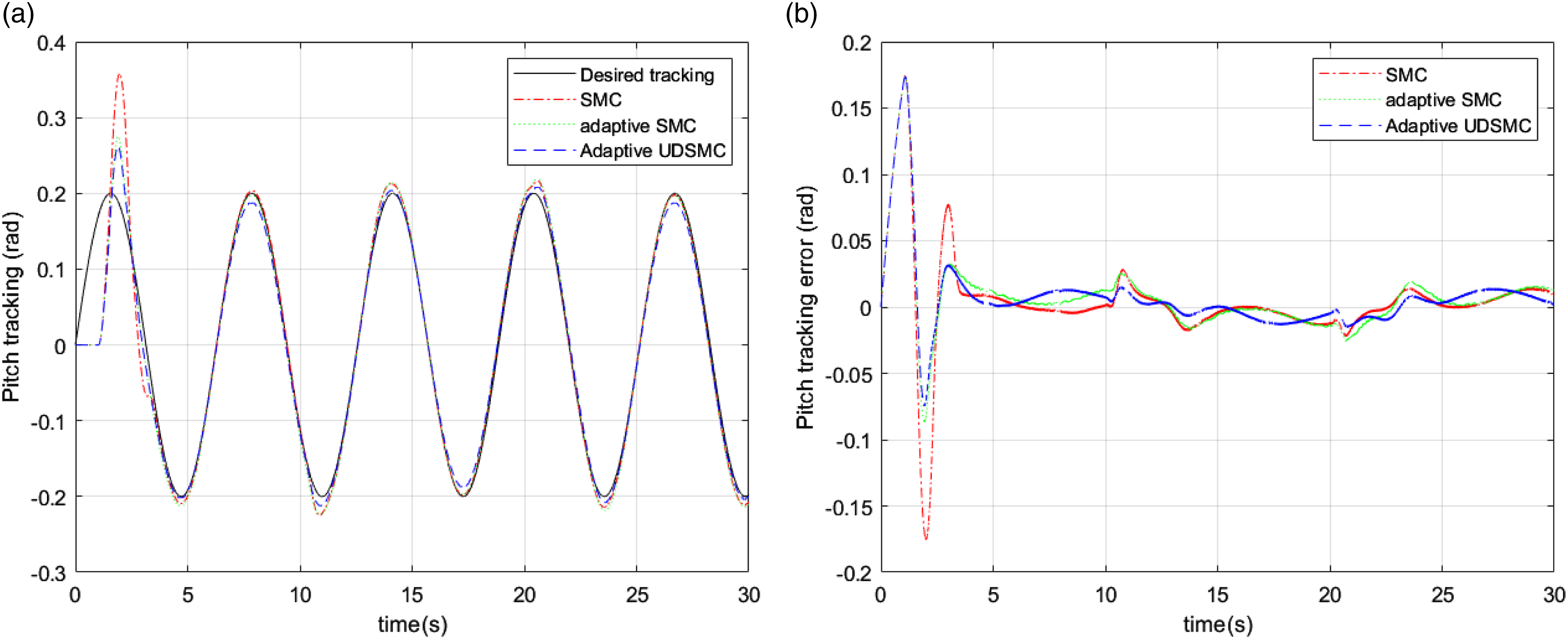
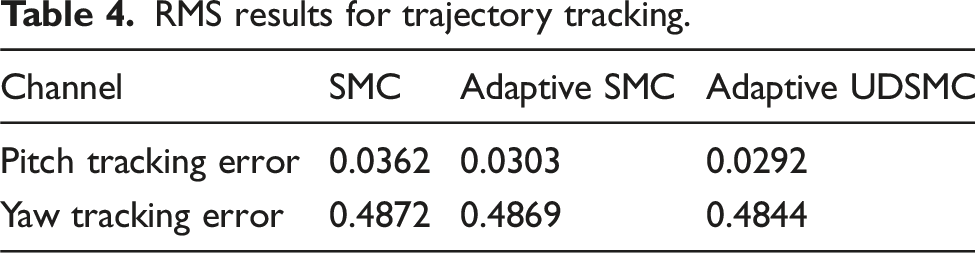
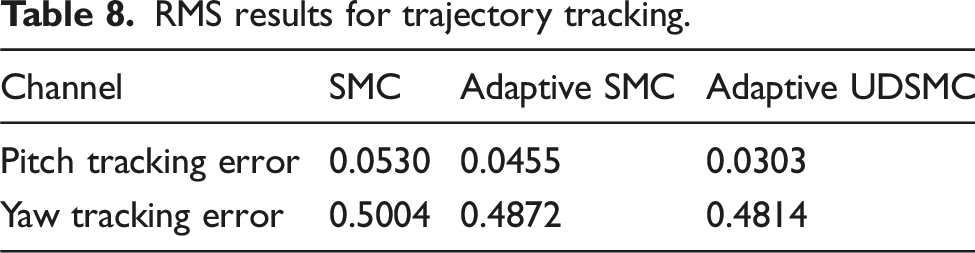
RMS results for trajectory tracking.
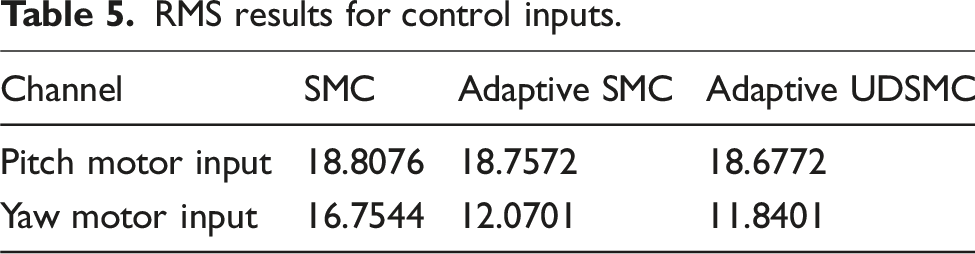
RMS results for control inputs.
4.2. Case 2: attitude tracking control with input saturations and disturbances
In this experiment, external control input disturbances and control input saturation are introduced into comparative experiments to further verify the effectiveness of the proposed control system. Figure 11 shows the complex disturbance signal introduced to the input channel as voltage disturbance, which is predicted difficultly. Figures 12–15 show the compared experimental results between the proposed adaptive UDSMC algorithm, conventional SMC and adaptive SMC (Zou et al., 2022) algorithms. From Figure 12, adaptive UDSMC system achieves better pitch angle tracking performance with less overshoot, smaller tracking error and fast convergence than both conventional SMC and adaptive SMC algorithms. Also, smaller overshoot in the initial sliding phase can be observed in adaptive UDSMC system from Figure 13 because of adaptive law 1 being introduced to compensate the error between desired control input and saturated control input. From Figure 14, three control systems could meet the control input saturation requirements. However, vigorous chattering issue can be observed from conventional SMC system because it cannot deal with control input saturation and unpredicted control input disturbance effectively. Also because of avoiding the overestimation of system uncertainties and disturbances, the proper input gain makes the average value of the input power of both adaptive SMC algorithms be smaller than that of SMC, which further reduces chattering problem. Figure 15 shows the adaptive laws designed in adaptive UDSMC for Case 2. Because Case 2 introduces control input saturation, adaptive law is activated to compensate control input error (from Figure 15(a)). Figure 15(c) and (d) show trends of adaptive law 2, which are weights for RBFNN design. Comparing with Figures 10 and 15, the adaptive law two varies with system following attitude and dynamics, therefore, the adaptive parameters in adaptive UDSMC are also adaptive. Disturbance introduced to input channel. Pitch tracking comparison of SMC, adaptive SMC and adaptive UDSMC in Case 2 between (a) pitch angle tracking and (b) pitch tracking errors. Yaw tracking comparison of SMC, adaptive SMC and adaptive UDSMC in Case 2 between (a) yaw angle tracking and (b) yaw tracking errors. Comparison of control inputs in pitch and yaw motors in Case 2 between (a) SMC and (b) adaptive SMC and (c) adaptive UDSMC.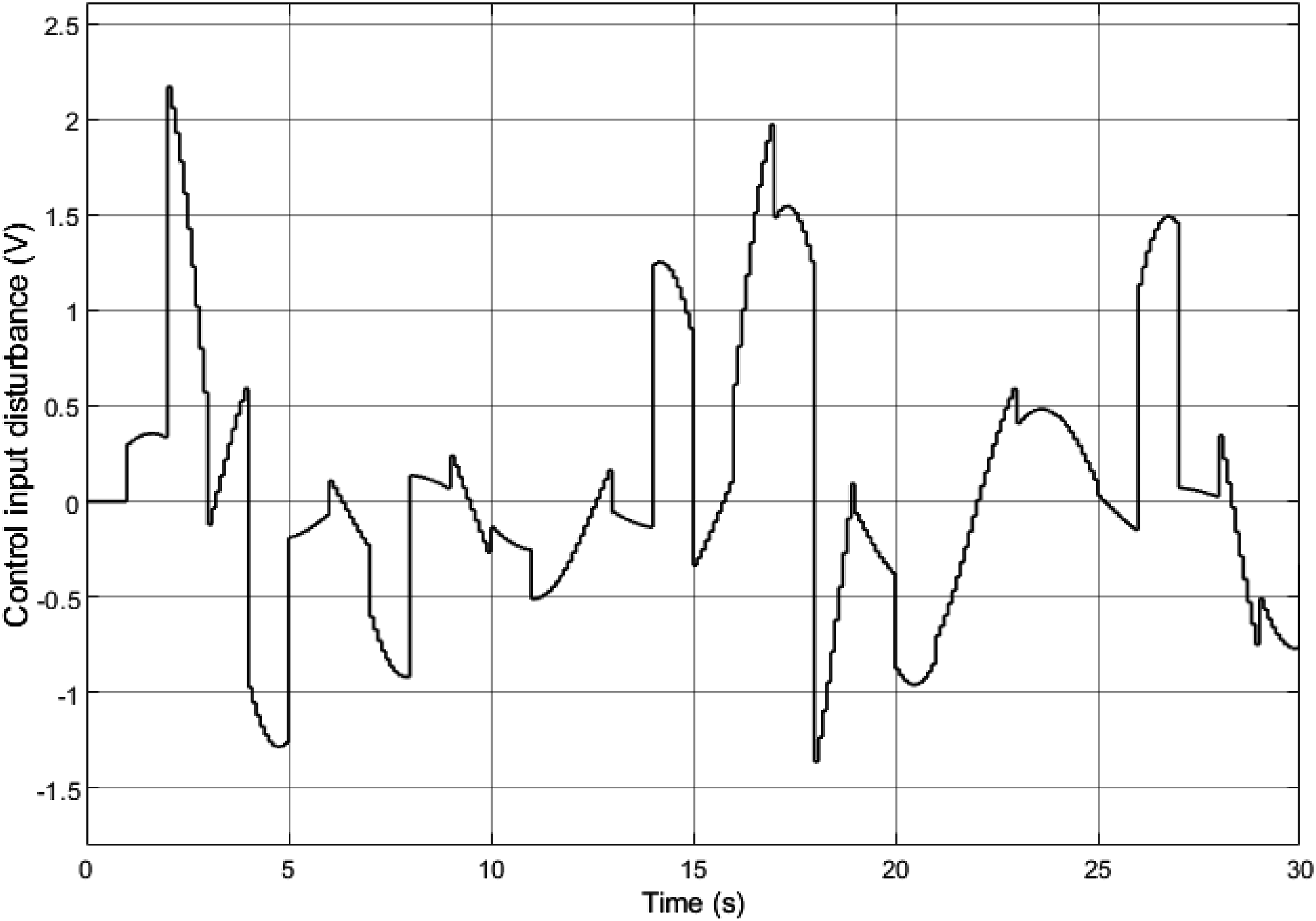
RMS results for trajectory tracking.

RMS results for control inputs.

4.3. Case 3: attitude tracking control with input saturations, control input disturbances and wind
In this experiment, control input saturation, control input disturbances and external wind disturbances are introduced into comparative experiments to further verify the effectiveness of the proposed control system. The wind disturbance is introduced to system from 12 s to 20 s with perpendicular direction of yaw motion. Figures 16–19 show the compared experimental results between the proposed adaptive UDSMC algorithm, conventional SMC and adaptive SMC (Zou et al., 2022) algorithms. From Figures 16 and 17, adaptive UDSMC system achieves better pitch and yaw angle tracking performance with less overshoot, smaller tracking error than both conventional SMC and adaptive SMC algorithms. Comparing with Figures 17 and 13, larger deviation in yaw tracking can be observed because of external wind disturbance. Also, smaller overshoot in the initial sliding phase can be observed in adaptive UDSMC system from Figure 17 because of adaptive law 1 being introduced to compensate the error between desired control input and saturated control input. From Figure 18, three control systems could meet the control input saturation requirements. However, vigorous chattering issue can be observed from conventional SMC system because it cannot deal with control input saturation and unpredicted control input disturbance effectively. Also, because of avoiding the overestimation of system uncertainties and disturbances, the proper input gain makes the average value of the input power of both adaptive SMC algorithms be smaller than that of SMC, which further reduces chattering problem. Figure 19 shows the adaptive laws designed in adaptive UDSMC. Because Case 3 also introduces control input saturation, adaptive law 1 is activated to compensate control input error (from Figure 19(a)). Figure 19(c) and (d) show trends of adaptive law 2, which are weights for RBFNN design. Comparing with Figures 10, 15 and 19, the adaptive law 1 and 2 varies with system following attitude and dynamics, therefore, the adaptive parameters in adaptive UDSMC are also adaptive (Figure 19). Pitch tracking comparison of SMC, adaptive SMC and adaptive UDSMC in Case 3 between (a) pitch angle tracking and (b) pitch tracking errors. Yaw tracking comparison of SMC, adaptive SMC and adaptive UDSMC in Case 3 between (a) yaw angle tracking and (b) yaw tracking errors. Comparison of control inputs in pitch and yaw motors in Case 3 between (a) SMC and (b) adaptive SMC and (c) adaptive UDSMC.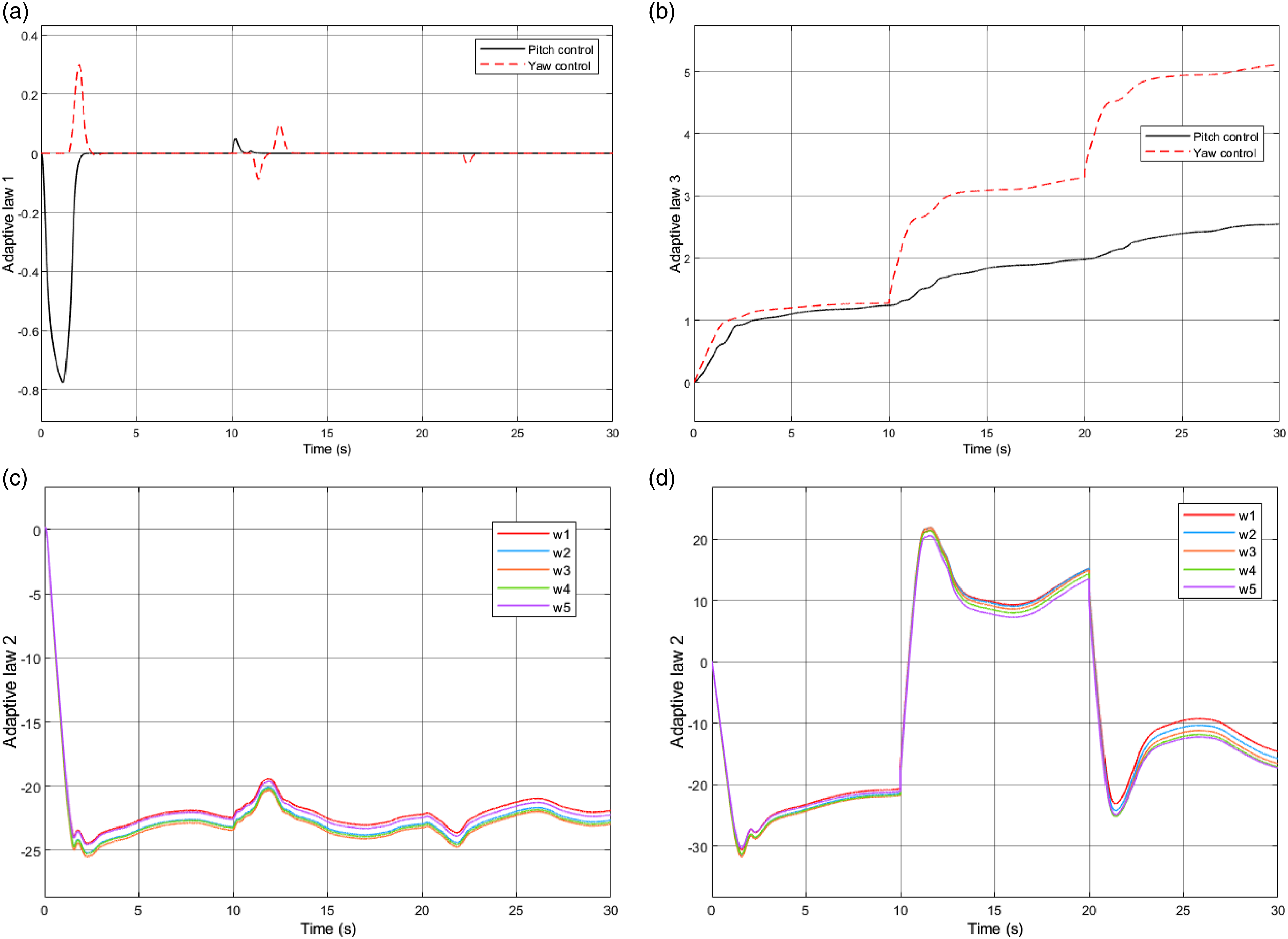
RMS results for trajectory tracking.
RMS results for control inputs.
5. Conclusions
This study proposes an adaptive UDSMC control framework for a 2-DOF helicopter system with control input saturation, control input disturbance and external wind disturbance. The invariant controller can achieve specific control performance, the DSM inverter cancels the dynamics of the system and ensures the robustness, and the RBFNN is used to approximate the dynamics and uncertainties of the system. Combining them with the three adaptive laws allows the design of the proposed adaptive UDSMC without prior knowledge of the bounds of the external disturbances and precise parameters from 2-DOF helicopter model. The rigorous Lyapunov analysis was exploited to ensure system global asymptotic stability, achieving precise attitude tracking control of 2-DOF helicopter systems. Finally, comparative experimental results reveal the more feasible and effective control performance of the proposed control algorithm compared with the conventional SMC and adaptive SMC.
However, the adaptive UDSMC associated with three adaptive laws presented in this study only considers convergence stability by using Lyapunov stability analysis, finite-time converge is not involved into this study. Therefore, our next research is trying to combine the finite-time SMC and finite-time RBFNN to establish a developed model-free/data-driven control system design framework.
Footnotes
Acknowledgements
The first author is acknowledging the partial PhD studentship for the research project and Quanser for providing Aero2 experimental platform.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.