
Abstract
The wheel slip tracking control is the basis of automatic braking control systems, and the accurate tracking for the desired wheel slip in the presence of lumped uncertainty is a vital guarantee of automatic braking control systems reliable operation. Therefore, an adaptive backstepping sliding mode control approach with radial basis function neural network is proposed to design the nonlinear robust wheel slip controller based on a quarter-vehicle model with lumped uncertainty. The radial basis function neural network as the uncertainty observer can effectively reduce the chattering of sliding mode by estimating the lumped uncertainty, and the adaptive law for the unknown weight vector of radial basis function neural network is derived by Lyapunov-based method. The influence of changes in tire sideslip angle and camber angle on the tire -road friction coefficient acts as an unknown scaling factor, and the adaptive law for the unknown scaling factor is derived via Lyapunov-based method. Then, the performance of the proposed controller is verified through simulations of various maneuvers on a full-vehicle dynamics simulation software.
Introduction
Electronic anti-lock braking system (ABS) can prevent each wheel from locking during emergency braking by controlling the wheel slip around the optimal point. With further advancements of today’s vehicles, more attention has been paid to the automatic braking control systems onboard the vehicles. For example, the electronic stability control (ESC) system can achieve lateral stabilization by commanding brake torque or desired wheel slip; 1 the automatic emergency braking (AEB) system can prevent accidents and reduce casualties simultaneously by commanding brake torque or desired wheel slip. 2 Notably, the current trend in wheel slip control is to move from simply avoiding wheel locking to the continuous wheel slip tracking control.
During the last decade, numerous studies have been carried out on this topic, and these approaches can be classified into two categories: rule-based wheel slip control approach that is designed mainly according to the thresholds of wheel deceleration and wheel slip,3–7 and model-based wheel slip control approach that is designed according to the nominal model of vehicle dynamics.8–15 Kuo and Yeh 3 proposed a four-phase control scheme for ABS, and the switching between the four phases was governed by the wheel deceleration thresholds and the elapsed time intervals spent in the four phases. Fu et al. 4 established a set of switching rules for ABS based on the semi-analytical and semi-numerical method. Pasillas-Lépine 5 constructed a new ABS regulation logic based on the wheel deceleration thresholds and proved the existence and stability of limit cycle on the wheel slip around the optimal point by the Poincaré maps and notions from hybrid systems theory. Tanelli et al. 6 proposed a hybrid ABS control approach through the analysis of the phase plane trajectories of the braking dynamics, and the proposed approach adopted the brake torque and the wheel slip as switching variables to give rise to an asymptotically stable limit cycle on the wheel slip around the optimal point. Moreover, a synthesis tool for choosing the tunable thresholds was given by evaluating the robustness properties and the region of attraction of the limit cycle. Jing et al. 7 presented a switched control approach for ABS based on the phase plane analysis for three different control actions, and the Lyapunov-based method in the Filippov framework was used to derive the switching surfaces of three different control actions, which were determined as the functions of the wheel slip and the time derivative of the wheel slip. The rule-based wheel slip control approach has high robustness against the lumped uncertainty that contains model uncertainty and external disturbance, and may regulate wheel slip in a neighborhood of the optimal point. However, it takes quite a lot of experience and time to tune the thresholds involved in this kind of approach.
Compared with the rule-based wheel slip control approach, the model-based wheel slip control approach has few tuning thresholds and may achieve the continuous wheel slip tracking control. Park and Lim 8 regarded the model uncertainties and the time delays of the system as the lumped uncertainty and proposed a wheel slip tracking controller based on the adaptive sliding mode control with the nonlinear sliding observer, which was used to estimate the vehicle speed. Shim et al. 9 investigated the effects of sliding surface design on the performance of ABS and proposed an alternative sliding surface design to improve convergence speed and oscillation damping around the target wheel slip. In Park and Lim 8 and Shim et al., 9 the gain of the discontinuous signum function of the proposed controller should be larger than the upper bound of the lumped uncertainty, and the much larger upper bound would cause greater chattering in the system response. Buckholtz 10 used the continuous saturation function instead of the discontinuous signum function of the sliding mode controller for wheel slip tracking to reduce the chattering in the system response, but that caused the robustness and tracking accuracy of the sliding mode control method to decrease. Amodeo et al. 11 proposed a nonlinear robust controller for wheel slip tracking based on the second-order sliding mode control method, which could reduce the chattering of the conventional sliding mode control method, but had low response speed. Johansen et al. 12 derived the linearization model for the braking dynamics by linearizing locally the quarter-vehicle model about the nominal wheel slip, and utilized gain-scheduled linear quadratic regulator (LQR) approach to design the wheel slip controller based on the linearization model. In Johansen et al., 12 the proposed wheel slip controller had robustness against the large error between the linearization model and the actual braking dynamics under limited driving conditions, but had much conservatism. Mirzaei and Mirzaeinejad 13 established the quarter-vehicle model with the Dugoff tire model as the nominal model and proposed an optimal predictive approach to design a nonlinear robust wheel slip controller. Subsequently, the proposed optimal predictive approach in Mirzaei and Mirzaeinejad 13 was used for ABS to improve vehicle directional stability on split-u roads in Mirzaeinejad and Mirzaei. 14 Pasillas-Lépine et al. 15 presented a continuous wheel slip control approach based on a simplified single-wheel model, and the stability analysis of the closed-loop system was established using the Lyapunov-based method. In the literature,13–15 only the influence of model uncertainties on system performance was considered, and the influence of external disturbance was ignored. Therefore, it is absolutely essential to design the model-based wheel slip controller which is insensitive to lumped uncertainty including model uncertainties and external disturbance.
The backstepping method has widely been investigated because of its simplified and flexible design procedure as well as its effectiveness for applying control to the lower triangular nonlinear systems.16–18 However, the backstepping method is sensitive to lumped uncertainty. Therefore, the adaptive control method and sliding mode control method, which have better robustness against lumped uncertainty, are extended to the backstepping method to deal with lumped uncertainty.19–22 For the standard adaptive backstepping sliding mode control, one of the key problems is chattering of sliding mode which can cause system instability and damage to both actuators and plants, and the chattering increases with increasing the gain of discontinuous switching of the control law, which is theoretically larger than the unknown bound of lumped uncertainty.
In this paper, an adaptive backstepping sliding mode control approach with the radial basis function neural network (RBFNN) is proposed to design the wheel slip controller based on the quarter-vehicle model. The RBFNN as the uncertainty observer can effectively reduce the unknown bound of lumped uncertainty by estimating the uncertain model dynamics, and the updated weights of RBFNN are integrated with the Lyapunov candidate function. Therefore, the uncertainty observer can reduce the chattering of sliding mode due to discontinuous switching of the control law. Moreover, the influence of changes in tire sideslip angle and camber angle on the tire–road friction coefficient acts as an unknown scaling factor, and the updated law is also integrated with the Lyapunov candidate function. Finally, the effectiveness of the proposed wheel slip controller is verified through simulations of various maneuvers on a full-vehicle dynamics simulator.
The rest of the paper is organized as follows. In section “The dynamic model,” the quarter-vehicle dynamic model considering the influence of changes in tire sideslip angle, camber angle, and lumped uncertainty is derived. In section “Controller design,” the wheel slip controller and the uncertainty observer based on adaptive backstepping sliding mode control with RBFNN are developed and analyzed. Simulations are carried out to validate the performances of the proposed controller in section “Simulation results” and the main conclusion of our work is presented in section “Conclusion.”
The dynamic model
Basically, the controller designed by the backstepping method generally has order comparable to the nominal model of the plant, and the low-order controller has good real-time performance and low manufacturing cost. Therefore, a simple yet effective quarter-vehicle model is used for the wheel slip controller design, as shown in Figure 1. The quarter-vehicle model includes only two degrees of freedom that the vehicle longitudinal speed and the angular speed of the wheel by ignoring the interactions between the four wheels and road slope.
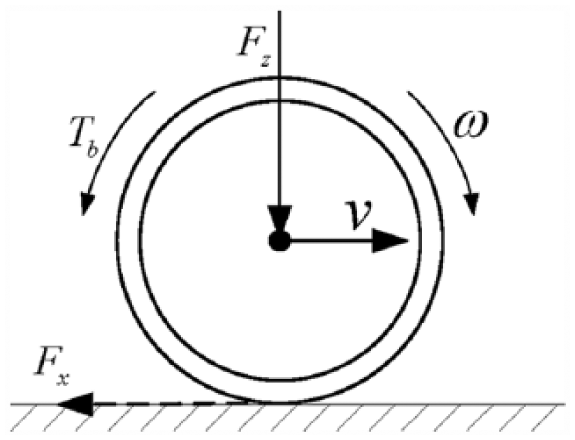
The quarter-vehicle model.
The dynamic equations for the quarter-vehicle model are given by

where
The wheel slip

Notice that, during deceleration, as
In this paper, the tire model introduced by Burckhardt 23 is used to describe the nonlinear relationship of the tire–road friction coefficient and the wheel slip, as it is simple and has a good degree of accuracy

where
Since the changes in tire sideslip angle and camber angle have an effect on the peak value of the tire–road friction coefficient curve

where
Substituting equation (4) into equation (1) yields

The derivation of equation (5) with respect to time yields

The derivation of equation (2) with respect to time yields

The derivation of equation (7) with respect to time yields

Substituting equation (6) into equation (8) and letting

where f(x1, x2) = -(1/v)[-2(Fzμ(x1) / m)x2 + (((1-x1) / m) + (r2 / J)) Fz
We assume that the model uncertainty can be represented by additive perturbation and external disturbance is included; equation (9) can be modified as 24

where ∆f and ∆G denote the model uncertainties,
Since the vehicle’s longitudinal speed dynamics are much slower than the wheel slip dynamics due to large differences in inertia, the quarter-vehicle model has the multi-time scale characteristic. 25 Therefore, we can treat the vehicle’s longitudinal speed as a slowly varying parameter, and the quarter-vehicle model reduces to the model of the wheel slip dynamics. Furthermore, the state equation for the model of the wheel slip dynamics can be described as

Remark 1
Equation (11) will be taken as the nominal model for wheel slip controller design and analysis.
Controller design
In this section, the RBFNN as the uncertainty observer is applied to approximate the lumped uncertainty of the system

where

where
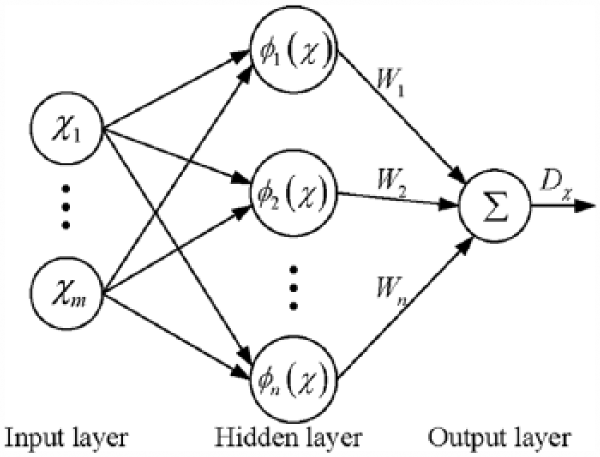
The structure of RBFNN.
According to the universal approximation property of RBFNN,
26
the lumped uncertainty of the system

where


where
Considering the unknown parameter
Step 1.
Based on the standard backstepping method, the state variables can be transformed into the following form

where
Define the Lyapunov candidate function

then the derivative of

Choose the virtual controller

where

Step 2.
Define the sliding mode surface

where

then

Choose the new Lyapunov candidate function as follows

where
The derivative of
Choose the actual control law as follows

where
Substituting equations (14) and (27) into equation (26) yields
Choose the adaptation laws as follows


Substituting equations (29) and (30) into equation (28) yields

where
Choose the parameters

Then we can obtain

There are two possible ways to choose the parameter
Case 1: choosing the parameter

Integrating both sides of the inequality (equation (35)), we can obtain

where
Since
Case 2: choosing the parameter
where
According to the inequality,
Remark 2
The parameter
Remark 3
The uncertainty observer proposed in this paper can reduce the unknown bound of lumped uncertainty. Therefore, it can reduce the gain of the discontinuous signum function of the control law at the same wheel slip tracking precision, or equivalently it can improve the wheel slip tracking precision at the same gain of the discontinuous signum function of the control law.
Simulation results
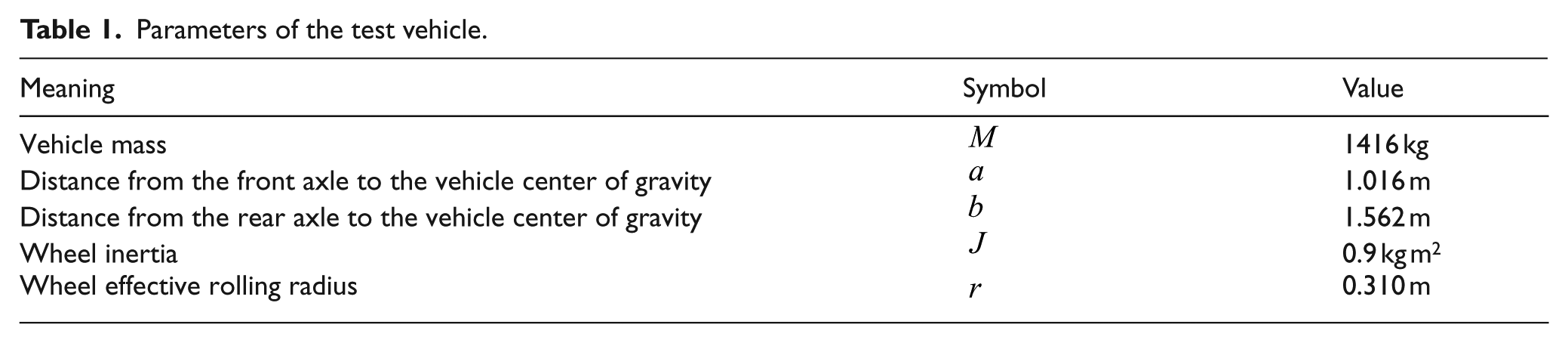
In this section, detailed simulations are carried out based on a full-vehicle dynamics simulation software (MSC CarSim®) to investigate and validate the performance of the proposed wheel slip controller with the uncertainty observer. Since MSC CarSim® is a comprehensive vehicle model that includes all relevant characteristics of the vehicle, the following simulation results can be considered very close to real vehicle experiments. Straight-line braking maneuvers on a flat dry asphalt road with three different kinds of desired wheel slips are performed, and we only show simulation results for the left front wheel. The parameters of the test vehicle are listed in Table 1.
Parameters of the test vehicle.
In order to satisfy the inequality (equation (33)) and to achieve excellent dynamic response and good stability characteristic of the closed-loop dynamic system, the parameters of the proposed controller are chosen as
Test 1
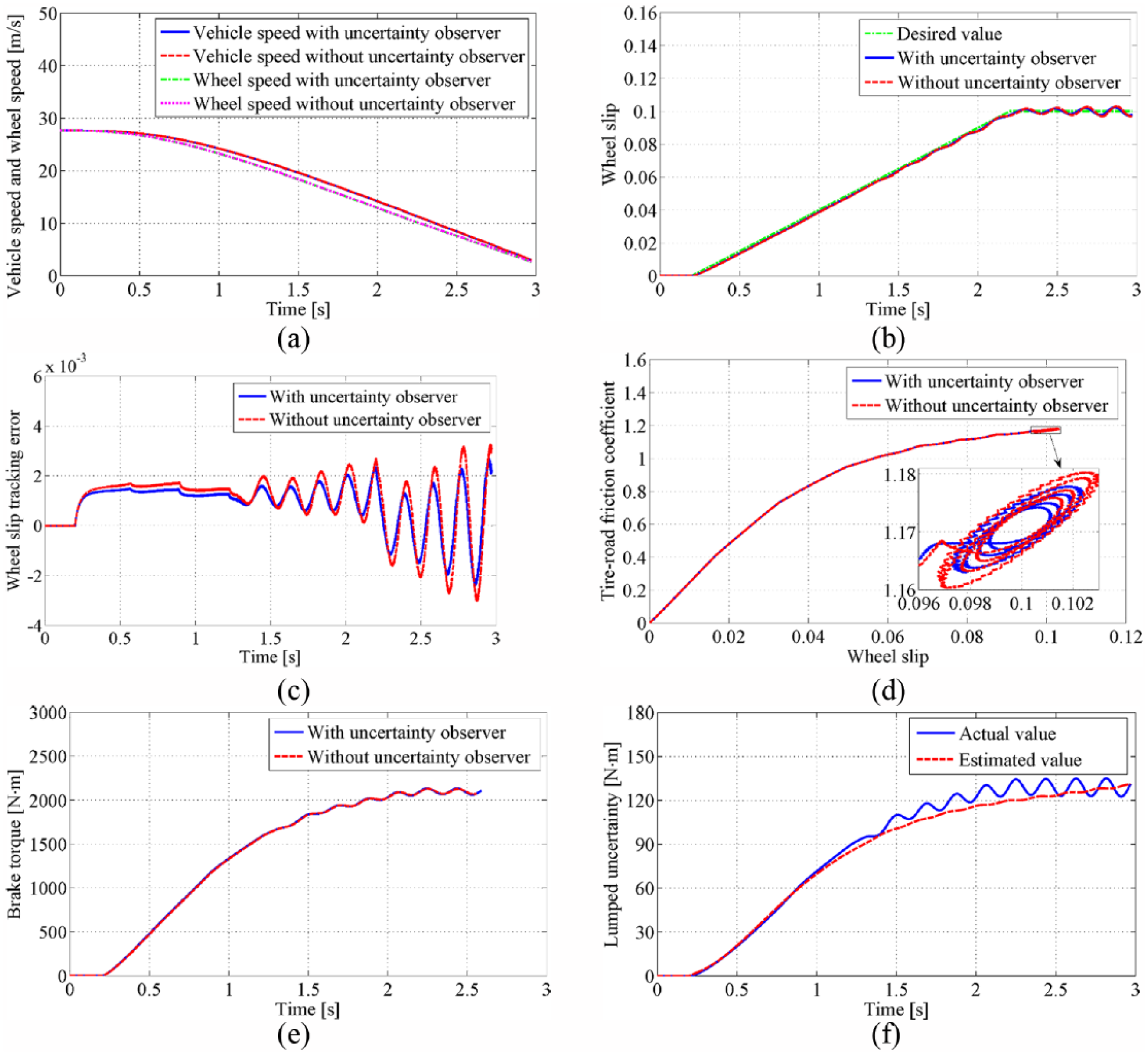
The initial vehicle speed is set to be 27.78 m/s (equivalently 100 km/h), and straight-line braking maneuver on a flat dry asphalt road is implemented with taking the step function as the desired wheel slip. The final value of the step function is set to be 0.1. Figure 3 shows the simulation results for comparing the effectiveness of the proposed controller with and without uncertainty observer. In order to avoid the wheel slip controller in equation (27) singularity, when the vehicle speed tends to be zero, the simulation is conducted up to the point where the vehicle speed decreases to 3 m/s (equivalently 10.8 km/h) as shown in Figure 3(a). Figure 3(b) and (c) shows that the proposed controller with uncertainty observer has better wheel slip tracking precision than that without uncertainty observer. In the meanwhile, the tire–road friction coefficient utilizing the proposed controller with uncertainty observer has a smaller fluctuation range as shown in Figure 3(d). Figure 3(e) shows that the brake torques are always within an acceptable range and Figure 3(f) shows that the uncertainty observer can effectively estimate the uncertainty. Moreover, in order to quantitatively evaluate the effectiveness of the proposed controller with and without uncertainty observer, the root mean square error (RMSE) between the actual wheel slip and the desired value is computed. According to the statistical results as shown in Table 2, the RMSE of the proposed controller with uncertainty observer is 0.0087 and the RMSE of the proposed controller without uncertainty observer is 0.0091.
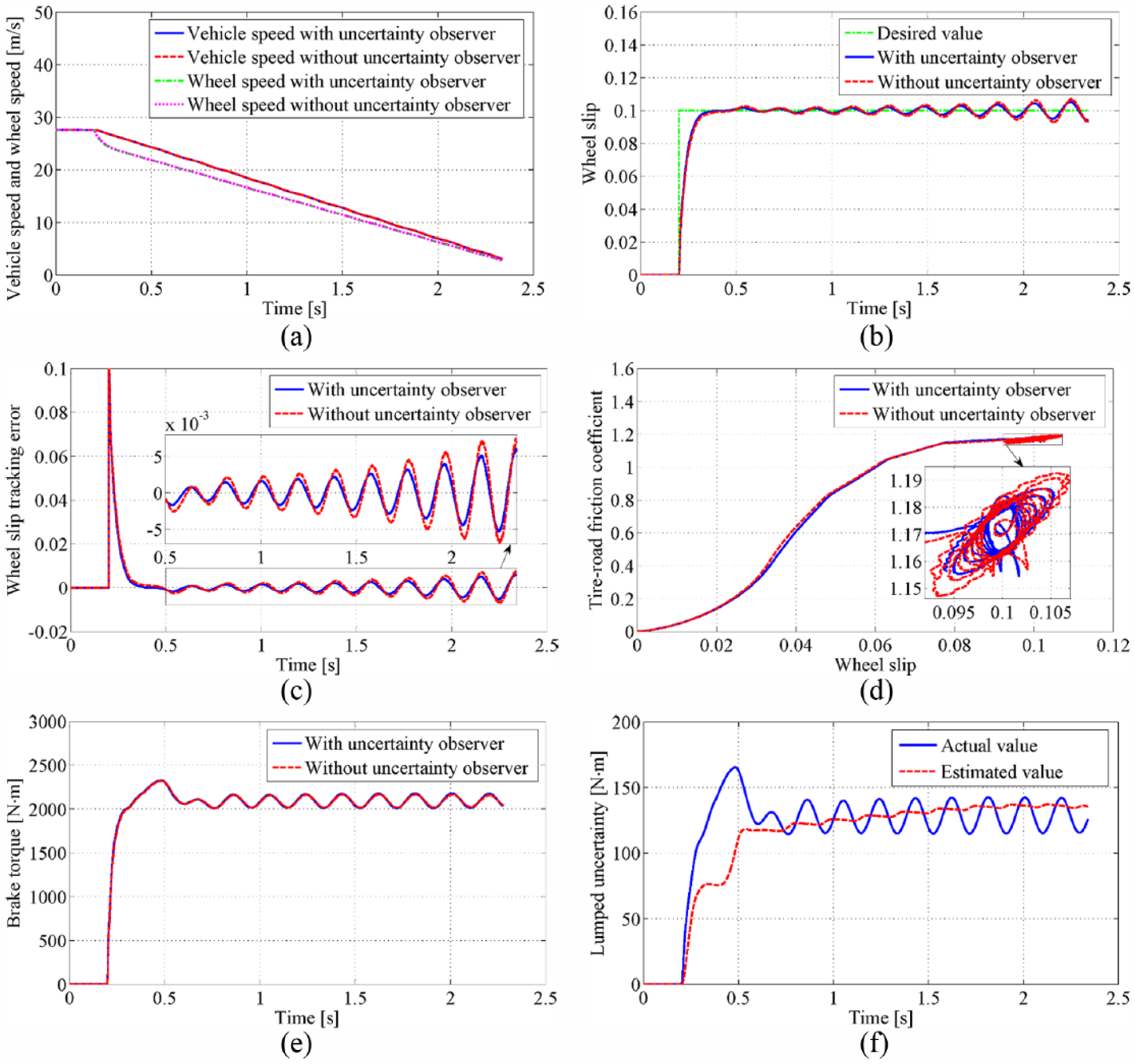
The simulation results of test 1: (a) vehicle speed and wheel speed, (b) desired wheel slip and actual wheel slip, (c) wheel slip tracking error, (d) tire–road friction coefficient versus wheel slip, (e) brake torque, and (f) uncertainty and estimated value.
Root mean square error between the desired and actual wheel slips.
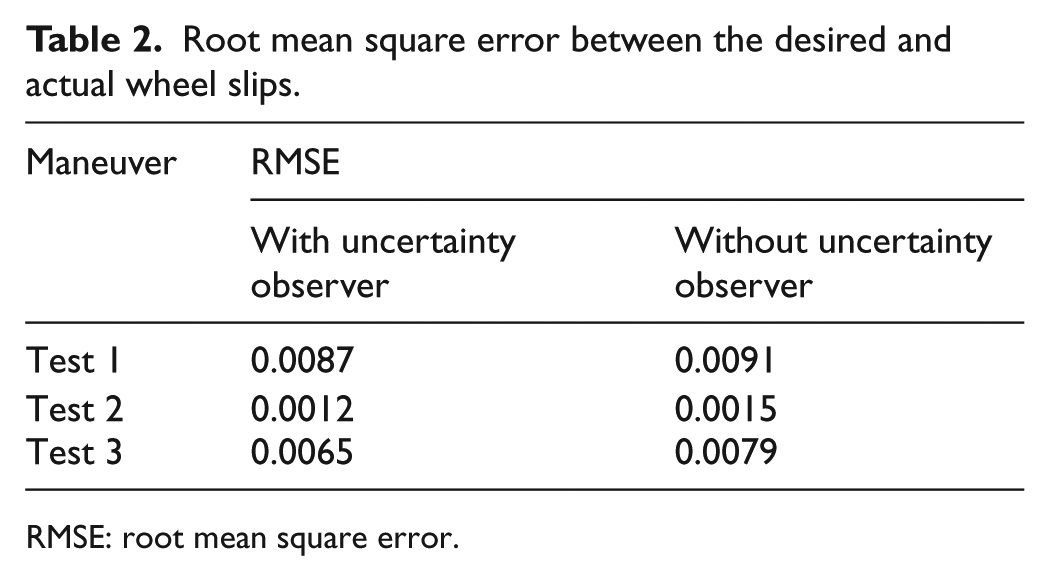
RMSE: root mean square error.
Test 2
The initial vehicle speed is set to be 27.78 m/s (equivalently 100 km/h), and Figure 4 shows the simulation results for braking on a flat dry asphalt road with choosing the ramp function as the desired wheel slip. The slope and the maximum value of the ramp function are set to be 0.05 and 0.1, respectively. The proposed controller with and without uncertainty observer can guarantee that the wheel slip accurately tracks the desired value as shown in Figure 4(b), and the proposed controller with uncertainty observer has better wheel slip tracking precision and smaller fluctuation range for the tire–road friction coefficient as shown in Figure 4(c) and (d). Figure 3(e) shows that the brake torques are always within an acceptable range and Figure 3(f) shows that the uncertainty observer can effectively estimate the uncertainty. Furthermore, according to the statistical results shown in Table 2, the RMSE of the proposed controller with uncertainty observer is 0.0012 and the RMSE of the proposed controller without uncertainty observer is 0.0015.
The simulation results of test 2: (a) vehicle speed and wheel speed, (b) desired wheel slip and actual wheel slip, (c) wheel slip tracking error, (d) tire–road friction coefficient versus wheel slip, (e) brake torque, and (f) uncertainty and estimated value.
Test 3
The initial vehicle speed is set to be 27.78 m/s (equivalently 100 km/h), and Figure 5 shows the simulation results for braking on a flat dry asphalt road with taking the sine function as the desired wheel slip. The amplitude, bias, and frequency of the sine function are set to be 0.045, 0.055, and 6.28 rad/s, respectively. As shown in Figure 5(b), the proposed controller with and without uncertainty observer can guarantee that the wheel slip follows the trend of the desired value, but there is a time delay of about 30 ms between the wheel slip and the desired value due to the rapid change of the desired value. Meanwhile, the proposed controller with uncertainty observer has better wheel slip tracking precision as shown in Figure 5(c). Figure 5(e) shows that the brake torques are always within an acceptable range and Figure 5(f) shows that the estimated value can follow the trend of the uncertainty. In addition, according to the statistical results shown in Table 2, the RMSE of the proposed controller with uncertainty observer is 0.0065 and the RMSE of the proposed controller without uncertainty observer is 0.0079.
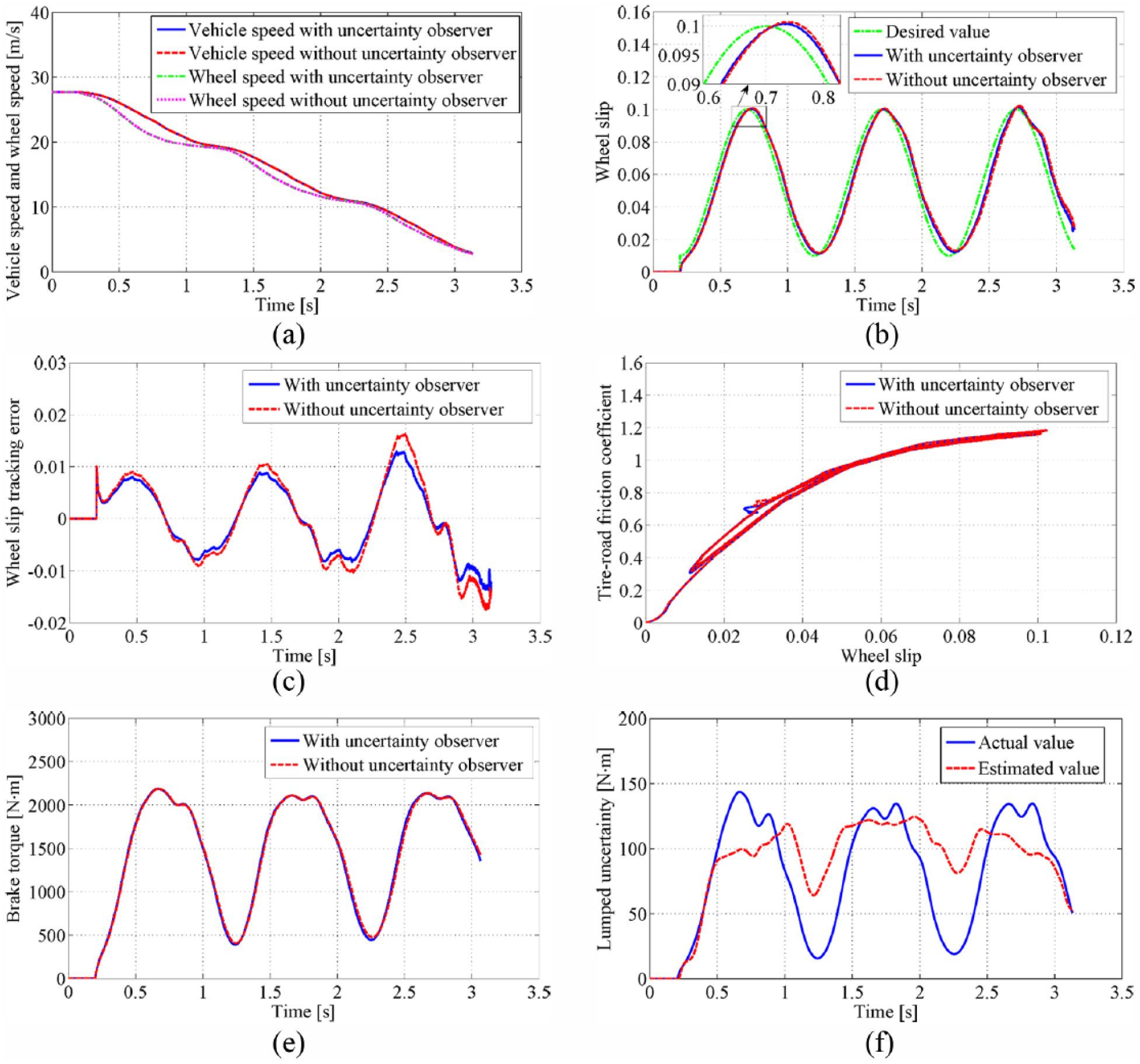
The simulation results of test 3: (a) vehicle speed and wheel speed, (b) desired wheel slip and actual wheel slip, (c) wheel slip tracking error, (d) tire–road friction coefficient versus wheel slip, (e) brake torque, and (f) uncertainty and estimated value.
Conclusion
In this paper, an adaptive backstepping sliding mode control approach with RBFNN for wheel slip controller design, which takes the quarter-vehicle model with lumped uncertainty as the nominal model, has been proposed. The RBFNN as the uncertainty observer can effectively reduce the chattering of sliding mode due to discontinuous switching of the control law by estimating the lumped uncertainty, and the unknown weight vector of RBFNN is updated online by an adaptive law, which is derived by Lyapunov-based method. Moreover, the influence of changes in tire sideslip angle and camber angle on the tire–road friction coefficient is taken as an unknown scaling factor, and an adaptive law for the unknown scaling factor is derived via Lyapunov-based method. Finally, the performance of the proposed controller is verified through simulations of braking maneuvers on a flat dry asphalt road with three different kinds of desired wheel slips on a full-vehicle dynamics simulator, and the simulation results indicate that it can guarantee that the wheel slip tracks the desired value quickly and accurately in the presence of lumped uncertainty.
In future works, the proposed controller will be tested further and fine-tuned on a real test vehicle equipped with by-wire electromechanical brakes. Moreover, the ESC system based on the proposed controller will be researched.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was supported by the National Key Research and Development Program of China (Grant No. 2016YFB0101002).