
Abstract
In this paper, a neural network adaptive sliding mode control is proposed for an MEMS triaxial gyroscope with unknown system nonlinearities. An input-output linearization technique is incorporated into the neural adaptive tracking control to cancel the nonlinearities, and the neural network whose parameters are updated from the Lyapunov approach is used to perform the linearization control law. The sliding mode control is utilized to compensate the neural network's approximation errors. The stability of the closed-loop system can be guaranteed with the proposed adaptive neural sliding mode control. Numerical simulations are investigated to verify the effectiveness of the proposed adaptive neural sliding mode control scheme.
1. Introduction
A gyroscope is a commonly used sensor for measuring angular velocity in many areas of application, such as navigation, homing and control stabilization. The performance of the MEMS gyroscope is deteriorated by the effects of time-varying parameters as well as noise sources, quadrature errors, parameter variations and external disturbances, which generate a frequency of oscillation mismatch between the two vibrating axes.
It is necessary to control the MEMS gyroscope using advanced control approaches, such as adaptive control, sliding mode control and intelligent control. In the last few years, various control approaches have been presented to control the MEMS gyroscope. Increasing attention has been given to the tracking control of the MEMS gyroscope. Batur et al. [1] developed a sliding mode control for a MEMS gyroscope system. Sun et al. [3] derived a phase-domain design approach to study the mode-matched control of a gyroscope. Park et al. [4] presented an adaptive controller of a MEMS gyroscope which drives both axes of vibration and controls the entire operation of the gyroscope. John et al. [5] proposed a novel concept for an adaptively controlled triaxial angular velocity sensor device. Fei [6-7] derived an adaptive sliding mode controller and a robust adaptive controller for a MEMS vibrating gyroscope.
Model reference adaptive control (MRAC) methods have been widely applied to robotic systems. Detailed physical descriptions regarding to the robotic system using MRAC have been discussed [8-10]. Recently, much research has been done to apply intelligent control approaches such as neural networks and fuzzy controls that do not require mathematical models and have the ability to approximate nonlinear systems. Therefore, intelligent control approaches have been applied to represent complex plants and to construct advanced controllers. Wang [11] proposed a universal approximation theorem and demonstrated that an arbitrary function of a certain set of functions can be approximated with arbitrary accuracy using a fuzzy system on a compact domain. Adaptive fuzzy sliding mode control schemes have been developed for robotic manipulators [12-13]. A neural network has the ability to approximate any nonlinear function over a compact input space. Therefore, a neural network's learning ability to approximate arbitrary nonlinear functions makes it a useful tool for adaptive application. Tracking controls using neural networks for nonlinear dynamic systems have become a promising research topic. Lewis et al. [14] developed neural network approaches for robotic manipulators. Horng [15] proposed a neural adaptive tracking control for a DC motor with unknown system nonlinearities where neural network approximation errors are compensated for by using the sliding mode scheme. Yu et al. [16] presented a direct adaptive neural control with a sliding mode method for a class of uncertain switched nonlinear systems. Lin et al. [17] used a neural network-based robust nonlinear control for a magnetic levitation system. Neural network sliding mode control approaches have been developed for robotic manipulators [18-19].
This paper focuses on the design of an adaptive neural sliding mode control based on input-output linearization. A robust adaptive neural sliding mode tracking control approach is presented for a MEMS gyroscope. By employing radial-basis-function neural networks to account for system uncertainties, the proposed scheme is developed by combining feedback linearization techniques and neural learning properties. The control scheme integrates the theory of sliding mode control and the nonlinear mapping of a neural network. A RBF neural network is used to adaptively learn the linear control component. The key property of this scheme is that the weights of the neural network are estimated adaptively and the velocity and position of the MEMS gyroscope are forced to follow any arbitrary trajectory.
The paper is organized as follows. In section 2, the dynamics of a triaxial MEMS gyroscope are introduced. In section 3, a feedback linearization procedure is described and a sliding mode control using a feedback linearization approach is proposed to guarantee the asymptotic stability of the closed loop system. In section 4, an adaptive neural network sliding mode control is developed. The simulation results are presented in section 5 to verify the effectiveness of the proposed control. Conclusions are provided in section 6.
2. Description of a motion equation of a mems triaxial gyroscope
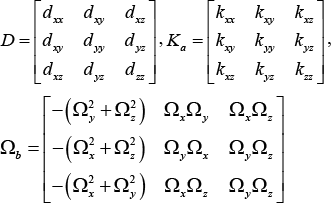
Assume that the gyroscope is moving with a constant linear speed with respect to an inertial system of reference; that the gyroscope is rotating at a constant angular velocity; that the centrifugal forces are assumed negligible; that the gyroscope undergoes rotations along the x, y and z axis. The nonlinear motion equations of such a triaxial gyroscope can be derived as:

where m is the mass of proof mass fabrication imperfections contributing mainly to the asymmetric spring terms
Dividing the equation by the reference mass, and because of the non-dimensional time

where
We define the new parameters as follows:

The final form of the non-dimensional equation of motion can be obtained by ignoring the superscript:

where
3. Sliding mode control
The sliding mode control is a robust control technique which has many attractive features, such as robustness to parameter variations and insensitivity to external disturbance. The sliding mode controller is composed of an equivalent control part that describes the behaviour of the system when the trajectories stay over the sliding manifold and a variable structure control part that enforces the trajectories to reach the sliding manifold and prevent them leaving the sliding manifold. The sliding mode has some limitations, such as chattering and high frequency oscillation in practical applications.
In this section, a novel sliding mode controller can be designed for the MEMS gyroscope with unknown system nonlinearities so as to guarantee the asymptotic stability of the closed loop system.
Consider the dynamics with parametric uncertainties and external disturbance as:

where
Rewriting (4) as:

where
Rewriting (5) as:

define:

where
Therefore, (6) becomes

The control target for the MEMS gyroscope is to maintain the proof mass so as to oscillate in the x, y and z directions at a given frequency and amplitude:

where
Define the tracking error and sliding surface as follows:


According to feedback linearization technique, the sliding mode controller can be designed as:

where
Define the Lyapunov function:

The derivative of the Lyapunov function with respect to time becomes:

Substituting (12) into (14) yields:

4. Adaptive Neural Sliding mode controller
We will address the design of an adaptive RBF network based sliding mode control problem. Because of the great advantages of neural networks in dealing with nonlinear systems, an adaptive neural sliding mode controller is designed and its stability is analysed in this section. Adaptive neural network sliding mode control is adopted to facilitate the adaptive tracking control of the MEMS gyroscope. In the practical application of the MEMS gyroscope,
The structure of the RBF neural network is a three-layer feedforward network shown as in Fig. 1. The block diagram of the RBF network is shown as follows: the input of the neural network is

The structure of the RBF network
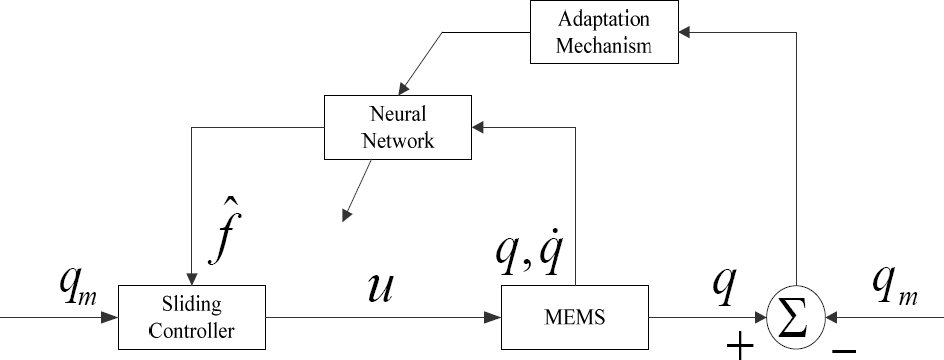
Block Diagram of the sliding mode control using the RBF network
The estimate of

where

where
Assumption. There exists a coefficient's weight ω such that

Suppose

where:

The derivative of the sliding surface is:

Substituting

Define the weights' error of the RBF neural network as:

Then the sliding dynamics of (22) becomes:

where:

Define a Lyapunov function:

The derivative of the Lyapunov function with respect to time becomes:

To make

Substituting (28) into (27) and choosing

Remark 1. In order to reduce the chattering problem in the sliding mode control, in the implementation of the sliding mode force, the continuous function

where
5. Simulation study
In this section, we will evaluate the proposed adaptive neural network sliding mode approach on the lumped MEMS gyroscope sensor model [1, 4, 5]. The parameters of the MEMS gyroscope sensor are as follows:
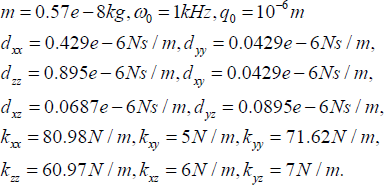
Since the general displacement range of the MEMS gyroscope sensor in each axis is at the sub-micrometer level, it is reasonable to choose 1
There are ± 10% parameter variations for the spring and damping coefficients with respect to their nominal values and ± 10% magnitude changes in the coupling terms with respect to their nominal values. The sliding parameter in (11) is
Fig.3 depicts the position tracking of the x, y and z directions with the sliding mode control. Fig.4 plots the tracking error of x, y and z. It can be observed from Figs. 3-4 that the position of x, y and z can track the position of the reference model in a very short time and that the tracking errors converge on zero asymptotically. In other words, the MEMS gyroscope can maintain the proof mass so as to oscillate in the x, y and z directions at a given frequency and amplitude by using the adaptive neural network sliding mode control. It can be seen from Fig.5 that the chattering problem can be diminished by using the smooth adaptive neural sliding mode controller.
It is demonstrated that the parameters of RBF network are on-line adjusted based on Lyapunov stability analysis and the proposed RBF controller incorporated with adaptive control can guarantee the asymptotical stability of the closed loop system. The advantage of the proposed robust adaptive RBF controller is that it does not depend on accurate mathematical models, which are difficult to obtain and may not give satisfactory performance under parameter variations. The simulation results prove that the system is capable of tracking the desired vibration trajectory determined by the reference model output; the performance of the adaptive neural network sliding mode control is satisfactory in the presence of unknown system nonlinearities.

Position tracking of X,Y and Z using the adaptive neural sliding mode control

Convergence of the tracking error e(t) using the adaptive neural sliding mode control
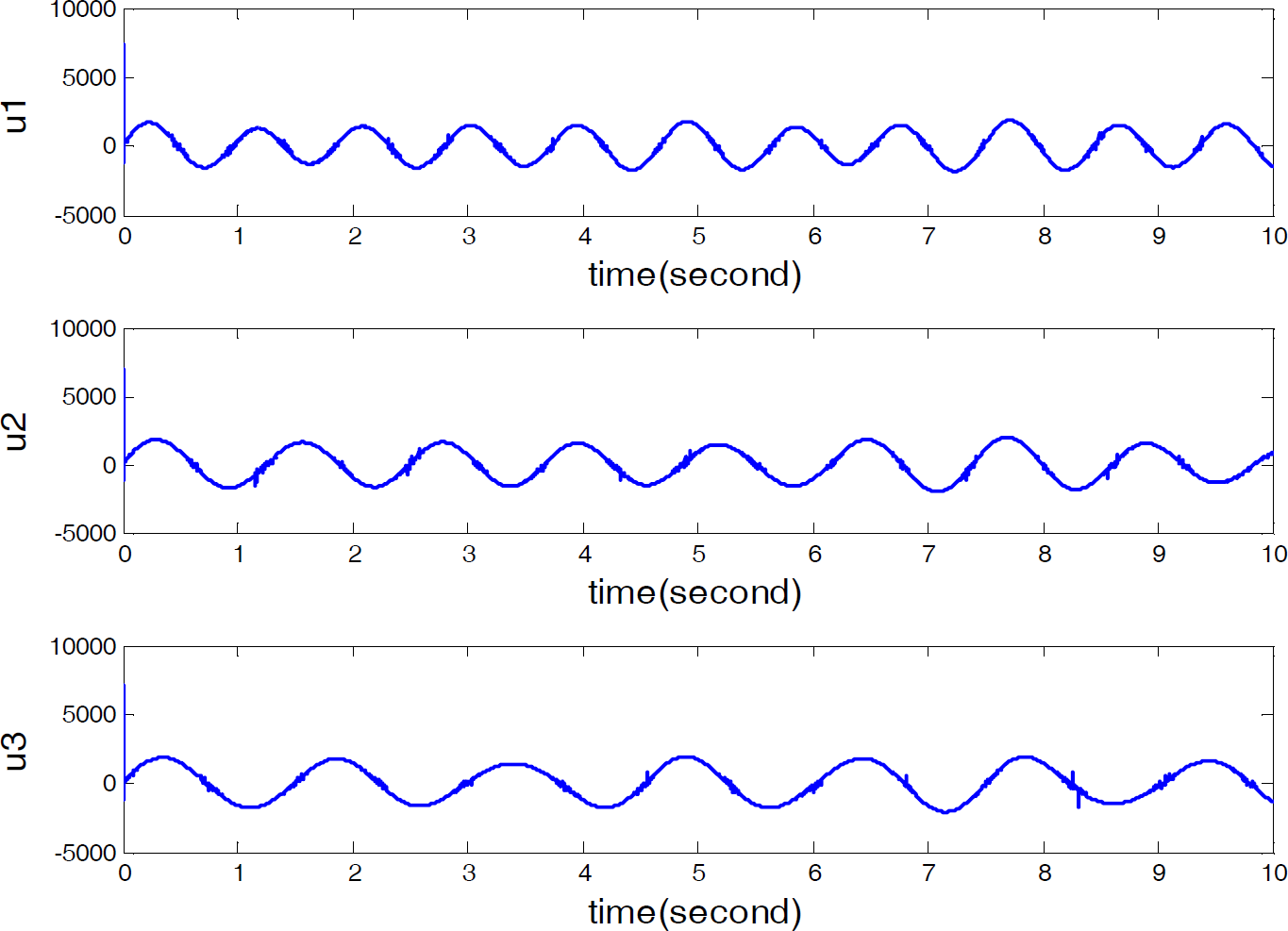
Control input using the smooth adaptive neural sliding mode controller
6. Conclusion
An adaptive neural network based sliding mode control using a feedback linearization approach is proposed for the triaxial angular velocity sensor. An adaptive rule is utilized to adjust online the weights of the RBF neural network, which is used to calculate the equivalent control. The stability of the adaptive RBF training procedure can be guaranteed within the Lyapunov framework. Numerical simulation demonstrated the satisfactory performance and robustness of the proposed adaptive neural sliding mode's control scheme in the presence of model uncertainties and external disturbances.
Footnotes
7. Acknowledgments
The authors would like to thank the anonymous reviewers for useful comments that improved the quality of the manuscript. This work is supported by the National Science Foundation of China under Grant No. 61074056, The Natural Science Foundation of Jiangsu Province under Grant No. BK2010201, and the Scientific Research Foundation for the Returned Overseas Chinese Scholars, State Education Ministry.