
Abstract
The design of an accurate observer is still a challenging problem for nonlinear systems subject to fault signals. This paper addresses the problem of simultaneous state and sensor fault estimation for discrete-time nonlinear systems. An uncoupled multimodel approach is adopted to deal with nonlinear systems subject to sensor faults. A simple sensor fault dynamic is exploited to transform this fault signal into a pseudo-actuator fault scenario. A new sliding mode multiobserver is proposed for the estimation of sensor faults and system states. This multiobserver is computed as a fusion of a set of local sliding mode observers with respective activation functions. The asymptotic stability of the proposed multiobserver is formulated in terms of linear matrix inequalities using the Lyapunov theory. A simulation example is retained to demonstrate the effectiveness of the proposed strategy. As well, a real-time application on a transesterification reactor is carried out to validate the theoretical results.
Keywords
1. Introduction
In modern industrial processes, most equipment operates in an interconnected mode. Thus, a measured variable corresponding to equipment may effect the performances of another one. Therefore, a malfunction or a fault in a component may lead to an economic loss, a system performance corruption, or even severe damages of the overall system. For instance, faulty sensors provide wrong information about the system dynamic and it may cause instability (Yang et al., 2015). Therefore, it is necessary to estimate these faults in their earliest stages.
For these reasons, many research works treating fault estimation for dynamical systems have already received lots of attention. As one of the most important featured areas, the fault estimation is addressed to satisfy increasing demands in various applications in control reconfiguration and real-time decisions. The main goal of fault estimation scheme is to determine the size, the magnitude, and the shape of faults which may appear in actuators, sensors, or the plant itself. The sensor fault estimation helps to correct, explicitly, the false information given by the sensor measurements.
Most real systems are modeled by nonlinear equations. Therefore, the fault estimation for nonlinear systems is more practical and challenging. However, an adequate model is necessary to deal with the nonlinearity and the complexity of various classes of nonlinear systems. The multimodel approach is one of the most efficient modeling techniques mainly for faulty systems. An efficient multimodel representation is provided by extracting a set of accurate data from the real nonlinear system.
The considered approach allows the representation of the whole behavior of a nonlinear system through a predefined number of partial linear models. Then, these partial models are combined according to their activation functions. The partial models can share the same state vector and are considered as a coupled multimodel. Otherwise, when each partial model has its own independent state vector, an uncoupled multimodel structure is obtained. Hence, this last structure allows the obtention of a more flexible multimodel representation (Montacer et al., 2019, 2020).
Generally, observers are exploited, in many research works, in order to estimate the system states (Fei and Liu, 2021). Moreover, the observer-based technique is one, among many fault diagnosis methods, that have been, frequently, investigated in the literature. Observer-based fault estimation schemes are, frequently, treated in the literature. For instance, the unknown input observer-based scheme is, extensively, used in the literature (Pourdadashi Komachali and Shafiee, 2020; Koenig and Mammar, 2001; Zhonghai et al., 2018; Zhou et al., 2020). In Gu and Yang (2018), authors propose a proportional integral unknown input observer to solve the problem of fault reconstruction for discrete-time Lipschitz nonlinear systems with unknown bounded disturbances. Several works such as Aouaouda et al. (2015); Henry (2008); Aouaouda et al. (2015) are interested in the design of the H ∞ observer-based schemes. As well, sliding mode theory is widely treated in the literature as one of the most efficient schemes for control design (Fei et al., 2022b, 2021, 2022a) and fault diagnosis (Saif and Xiong, 2003; Yan and Edwards, 2007). The last mentioned scheme has been recognized as the most efficient technique used to estimate faults with sufficient accuracy. The main feature of the sliding mode observer is the presence of the discontinuous term injected into its structure that ensures the robustness against uncertainties and internal and external disturbances (Chu et al., 2020; Czyżniewski and Łangowski, 2021; Koshkouei and Zinober, 2002; Montacer et al., 2018; Nguyen et al., 2020; Zong et al., 2012; Zhang et al., 2012). The majority of recent works on states and fault estimation using sliding mode observers are developed for continuous-time systems. In Gómez-Peñate et al. (2021), the author proposed a proportional multiple-integral sliding mode observer for a specific class of continuous linear parameter varying systems. Habibi et al. (2021) developed an adaptive sliding mode observer that is used only for faulty wind turbines. In Zhu et al. (2021), the problem of fault detection and isolation is studied for switched nonlinear systems in continuous time. Hence, for both linear and nonlinear continuous-time systems, the fault diagnosis is, frequently, studied using the sliding mode observer. However, the sliding mode observer design is not carried out for discrete-time systems. Although works that investigate the simultaneous state and fault estimation based on the sliding mode observer are not extensively studied for nonlinear systems modeled by the multimodel approach, several works, such as Asadi et al. (2020); Ben Brahim et al. (2017, 2015); Sedigh Ziyabari and Aliyari Shoorehdeli (2018), exploit the sliding mode observer in order to estimate simultaneous states and faults for continuous nonlinear systems described by the Takagi–Sugeno model. In Feng and Wang (2020), authors are interested in the design of the sliding mode observer for the reconstruction of actuator faults in Takagi–Sugeno fuzzy systems looking for quantization errors and uncertainty compensation. Indeed, the coupled multimodel structure exploited in the earlier aforementioned works can be overparametrized since its partial models must have the same dimension. However, the use of the uncoupled multimodel structure dealing with faulty discrete nonlinear systems is proposed to be computationally simpler, more challenging, and not yet studied.
The main contribution of this paper is to synthesize a new sliding mode multiobserver which is able to simultaneously estimate states and sensor faults with good performances for discrete nonlinear systems. The proposed multiobserver is characterized by many advantages. For instance, this multiobserver is able to omit the assumption of knowing the nominal nonlinear model by using the uncoupled multimodel approach. In addition, the proposed sliding mode multiobserver may simultaneously estimate states and sensor faults. Furthermore, an optimal choice of multiobserver gain using linear matrix inequalities (LMIs) ensures the stability of this multiobserver. The multimodel approach is exploited to describe the behavior of the considered system into its operating space. Also, the asymptotic stability of the proposed multiobserver is guaranteed using the Lyapunov approach which helps in obtaining sufficient conditions in terms of LMIs. Then, an application on a transesterification reactor is elaborated to maintain the effectiveness of the proposed strategy.
The paper is organized as follows. In the following section, the description of nonlinear systems subject to sensor faults is introduced using the uncoupled multimodel approach. In the third section, a new structure of sliding mode multiobservers is designed to estimate states and sensor faults. Asymptotic stability conditions of the proposed multiobserver are formulated in terms of LMI(s). A numerical example is provided in the fourth section to show the effectiveness of the proposed method. In the fifth section, a real application on a transesterification reactor is carried out. Finally, some conclusions are made in the last section.
2. Uncoupled state multimodel representation subject to sensor faults
Modeling and identification of complex nonlinear systems are generally difficult to handle. The multimodel approach is a challenging topic for many researchers owning to its mathematical simplicity. Hence, the key point is to approximate nonlinear systems with a set of local linear models. The whole operating space is decomposed into a predefined number of regimes where each local model is active only on its own regime. Generally, partial models may be homogenous or heterogenous. For instance, homogenous partial models, where the models have the same structure, refer to the coupled multimodel. However, heterogenous partial models, where models have different structure, refer to the uncoupled multimodel. Unlike the coupled multimodel, the uncoupled one is, mostly, favored because it is more flexible and can cope with the problem of dimensionality (Orjuela et al., 2007). The weighting or validity functions allow the combination between the different partial models. Thus, a good choice of the considered functions leads to an accurate multimodel representation (McLoone and Irwin, 2001; Leith and Leithead, 1999).
The following nonlinear system with the sensor fault represented by an uncoupled multimodel is considered
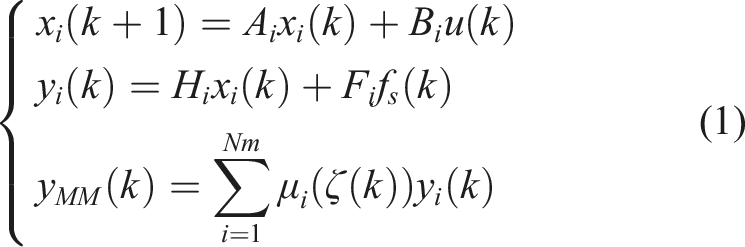

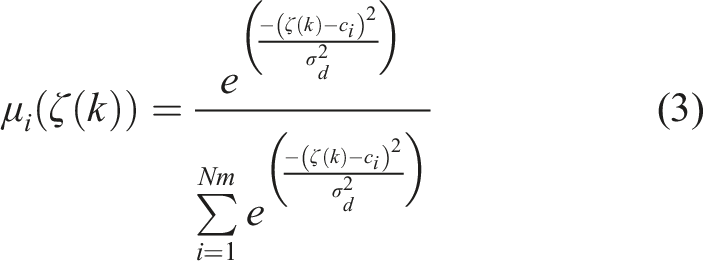
The weighting functions are given by
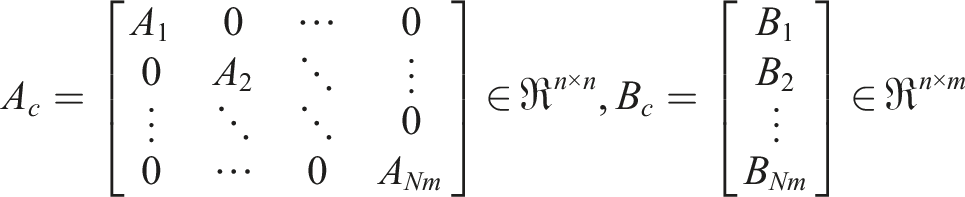
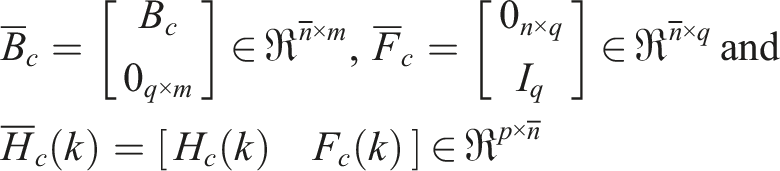
By assuming an augmented state vector such as

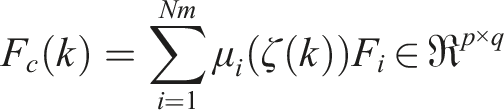
Knowing that
The sensor fault vector dynamic may be expressed as follows


Another augmented state vector is defined as follows

According to (5) and (6), the system (4) may be substituted by the following representation with a pseudo-actuator fault as follows

3. Sensor fault estimation based on the sliding mode multiobserver: LMI formulation
The sliding mode multiobserver corresponding to the system (7) is proposed as follows
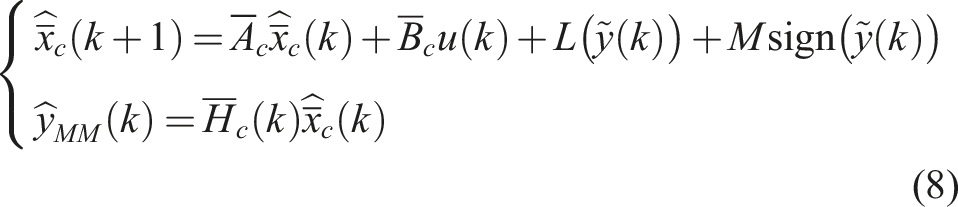

The obtention of sliding modes on
The state estimation error is given by the following expression

According to (7) and (8), the augmented state estimation error is deduced as follows

The aim of the present paper is to reach the observer gain L that must ensure the stability of the augmented state estimation error and provide an accurate fault and state estimation.
The following lemmas are useful to derive this aim:
For any matrices W and W′ with appropriate dimensions, the following inequality is verified for any positive scalar α (Pozanyak, 2008)

Suppose R = R
T
, G = G
T
, and S are three matrices of appropriate dimensions, the following LMIs are equivalent The object of the present paper is illustrated through the following theorem.


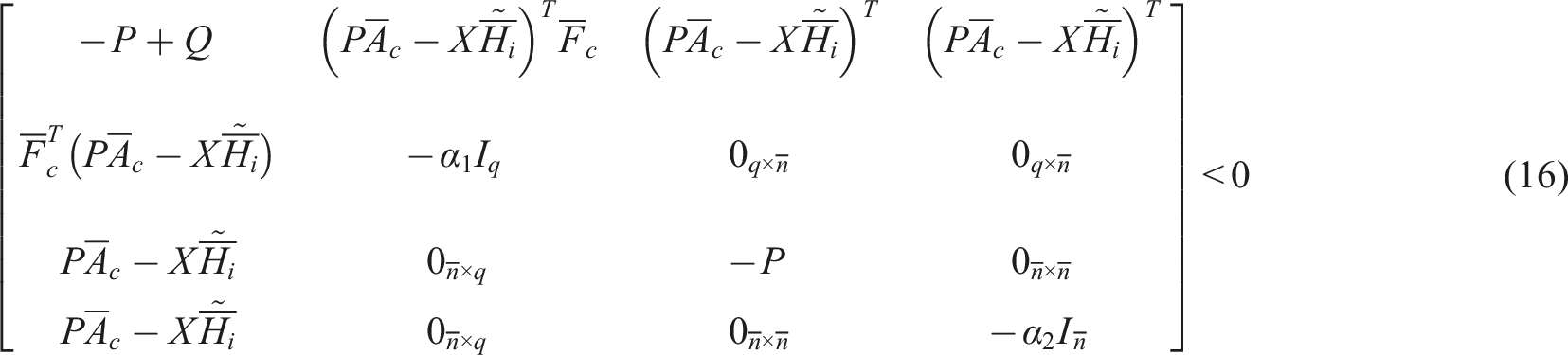
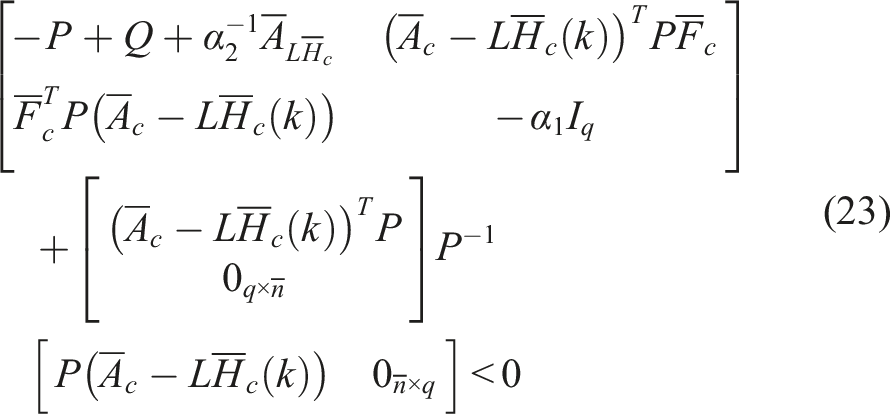
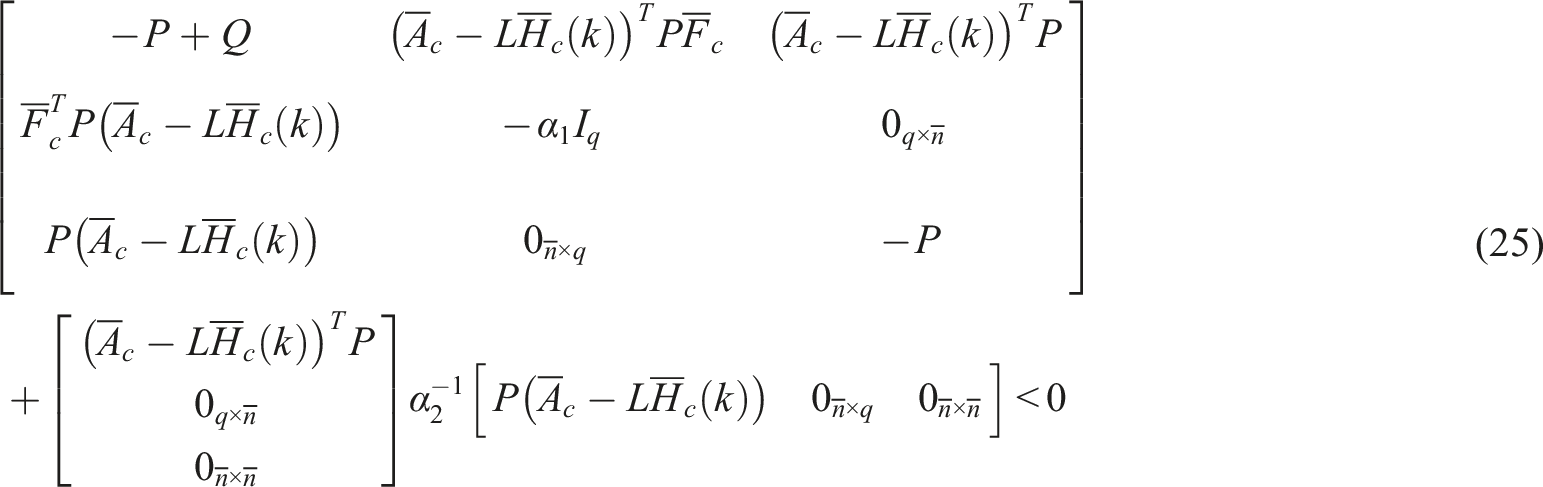
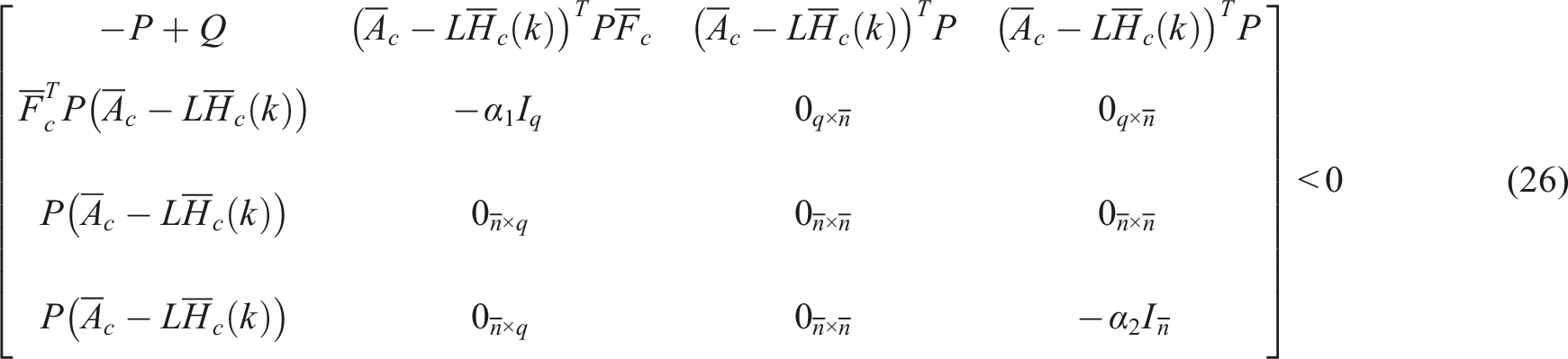
The asymptotic stability of the augmented state estimation between the uncoupled multimodel subject to sensor fault defined in (7) and the proposed sliding mode multiobserver (8) is ensured if the following LMI(s) hold for any positive definite matrices P and Q and any positive scalars α1 and α2
Proof Consider the following Lyapunov candidate function Substituting (12) into (17), we obtain The following expression of the Lyapunov variation may be deduced Lemma 1 is applied in this previous equation, and then, we obtain Applying the Schur complement stated in Lemma 2 in (21), the following LMI(s) is reached The following inequality is deduced The Schur complement is reapplied in equation (23), and the following LMI(s) is obtained These previous LMI(s) are equivalent to The following LMI formulation is, finally, obtained




4. Simulation example
The present section is reserved to illustrate the effectiveness of the proposed sliding mode multiobserver in estimating states and faults. Let us consider the following partial models obtained in Messaoud et al. (2019); Messaoud and Ben Abdennour (2018) using the offline identification procedure of the Levenberg–Marquardt algorithm (Orjuela et al., 2013; Marquardt, 1963):




The retained decision variable ζ(k) is the input signal u(k) ∈ [−2.52.5].
The centers and the dispersion are given, respectively, by c1 = −2, c2 = −1, c3 = 1, c4 = 2, and σ d = 0.3.
The sensor fault is added to demonstrate the proposed method, and it is assumed to be

The resolution of the LMIs (16) provides the following matrices P, Q, and the gain L and the two scalars α1 and α2
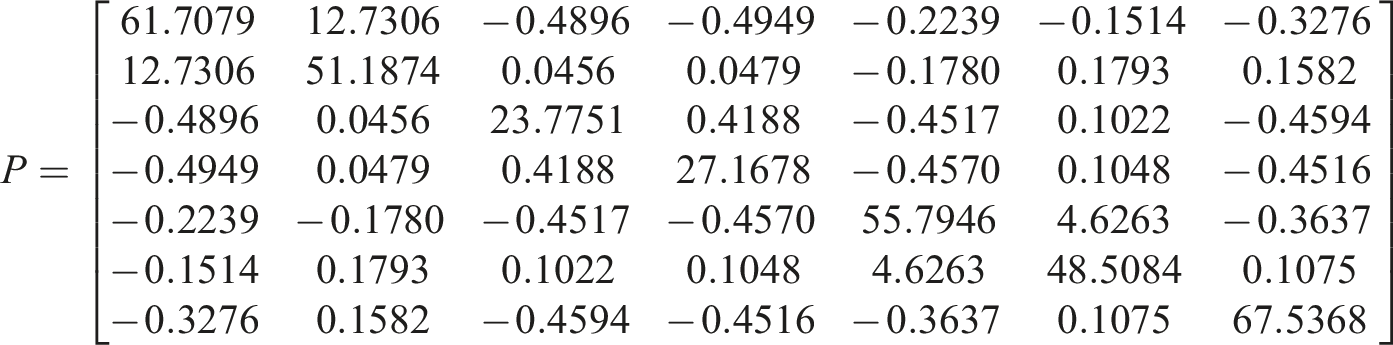

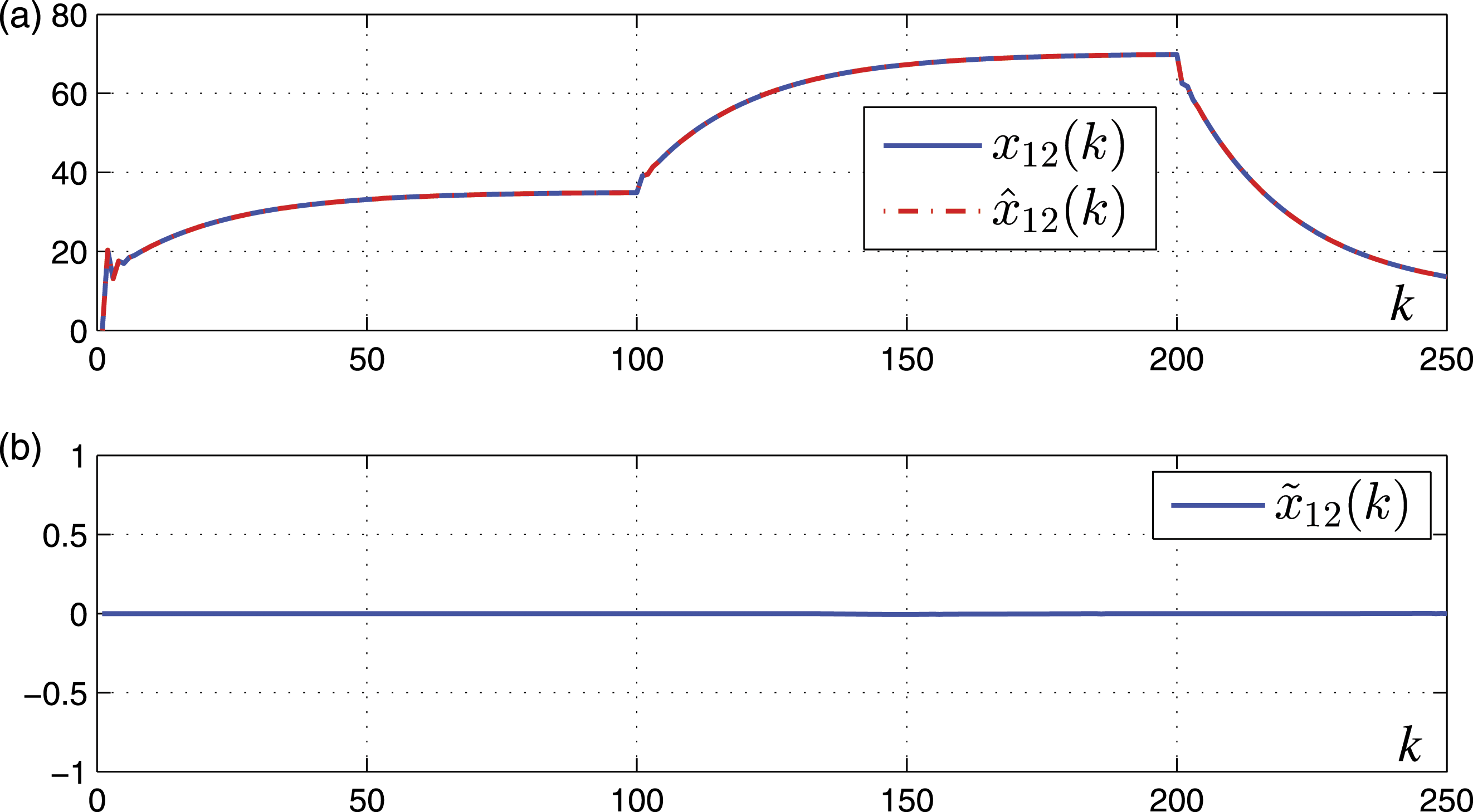
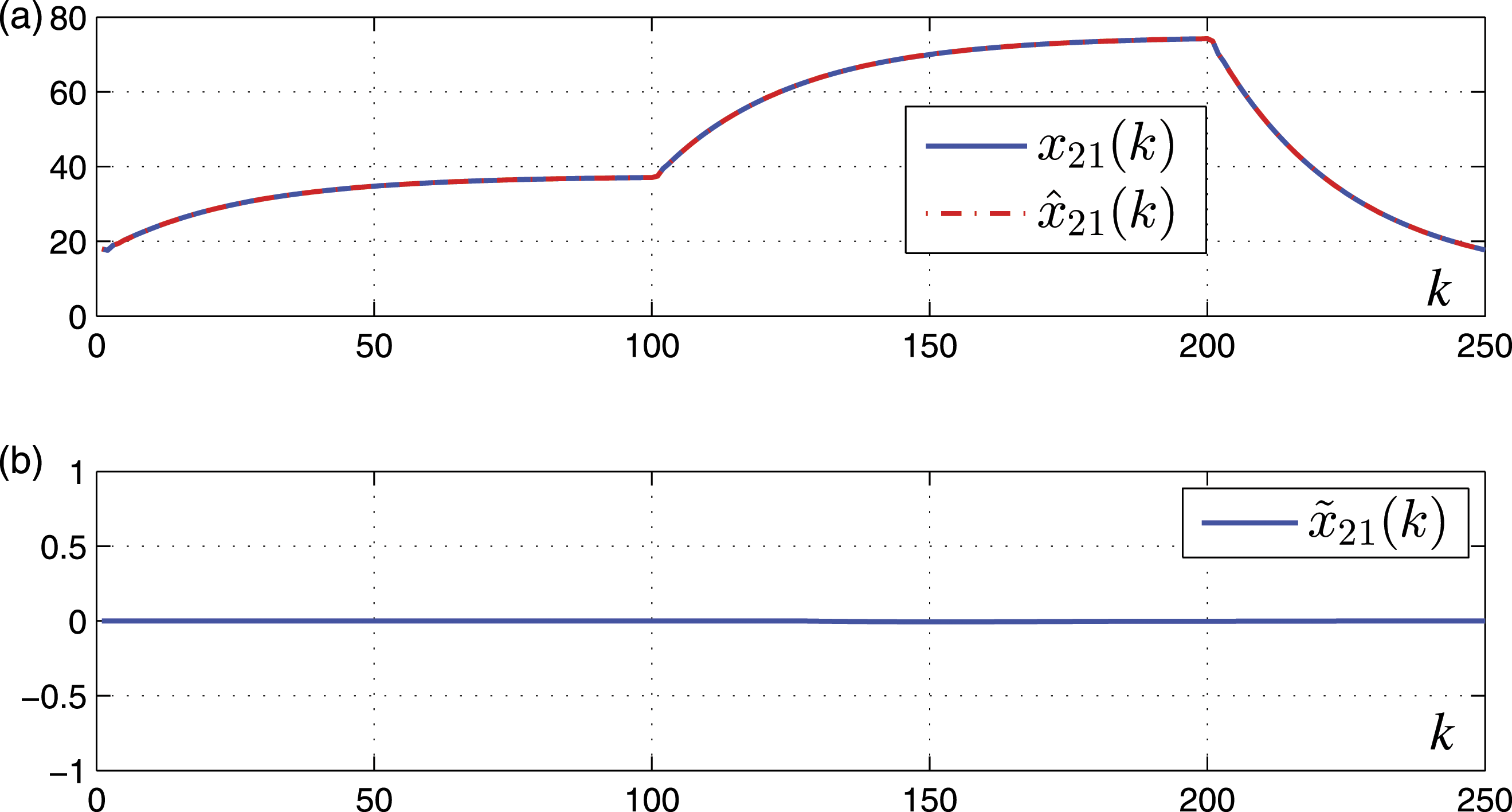
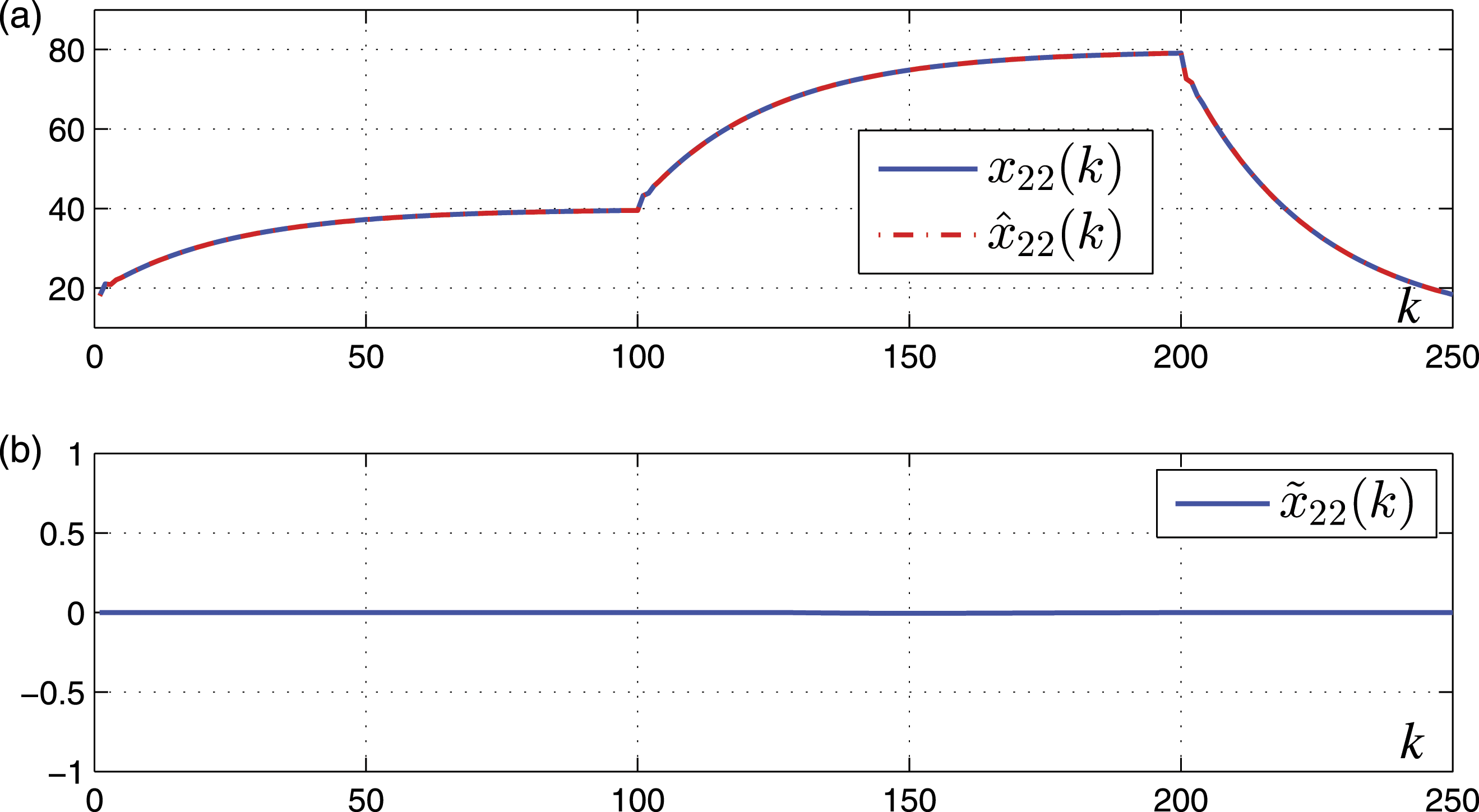
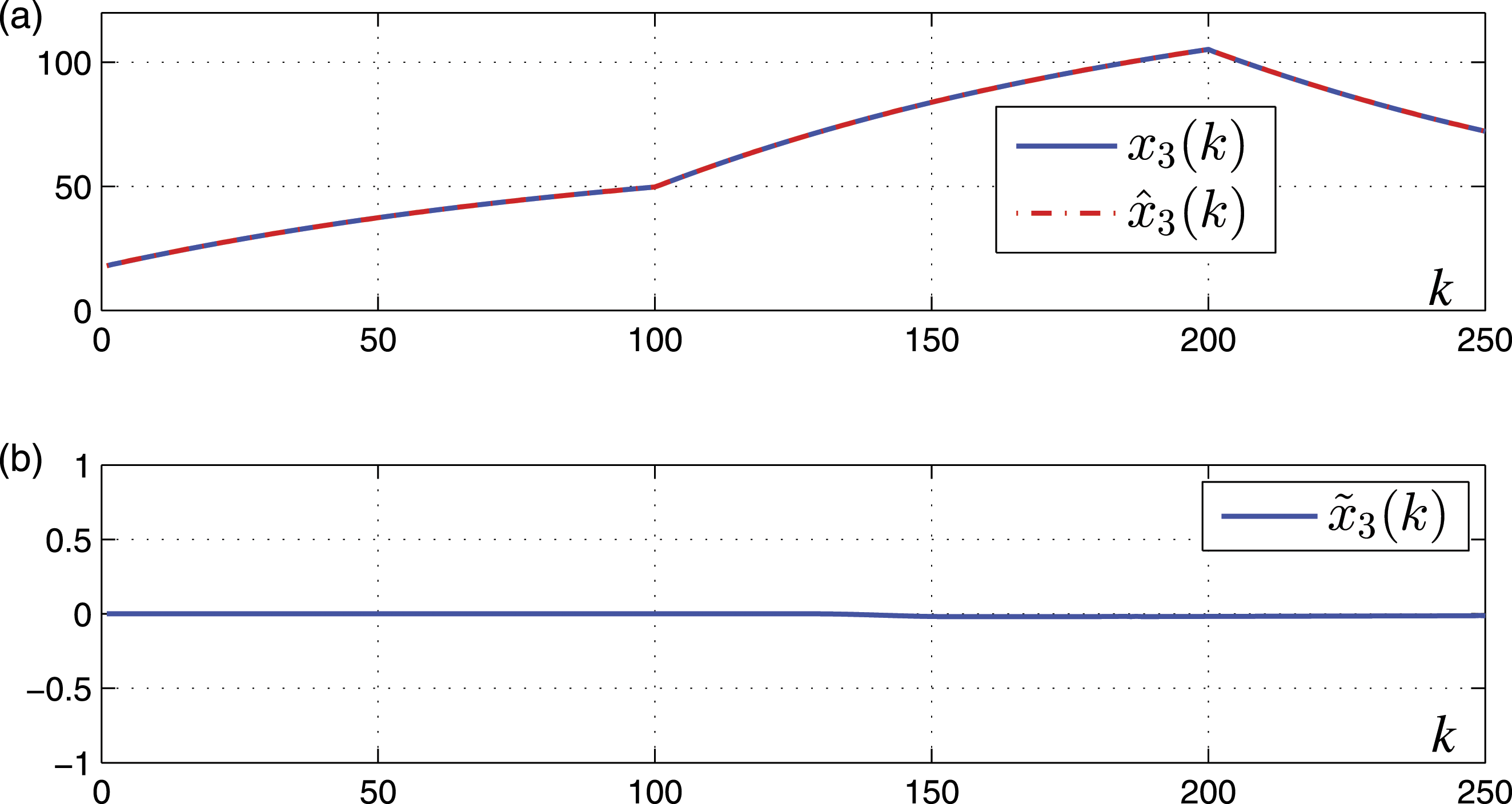
Figure 1, Figure 2, Figure 3, Figure 4, Figure 5, and Figure 6 show the evolutions of the real and estimated states and the state estimation error of each partial model. The evolution of the real and reconstructed multimodel output and the reconstruction error is illustrated by Figure 7. Moreover, Figure 8 shows the evolution of the real and estimated sensor fault signal as well as the fault estimation error. Partial model 1: (a) Evolutions of state 1 and its estimate and (b) evolution of the estimation error Partial model 1: (a) Evolutions of state 2 and its estimate and (b) evolution of the estimation error Partial model 2: (a) Evolutions of the state and its estimate and (b) evolution of the estimation error Partial model 3: (a) Evolutions of the state and its estimate and (b) evolution of the estimation error Partial model 4: (a) Evolutions of the 1 and its estimate and (b) evolution of the estimation error Partial model 4: (a) Evolutions of state 2 and its estimate and (b) evolution of the estimation error (a) Evolution real and reconstructed outputs and (b) evolution of the output reconstruction error. (a) Evolution of sensor fault and its estimate and (b) evolution of the sensor fault estimation error.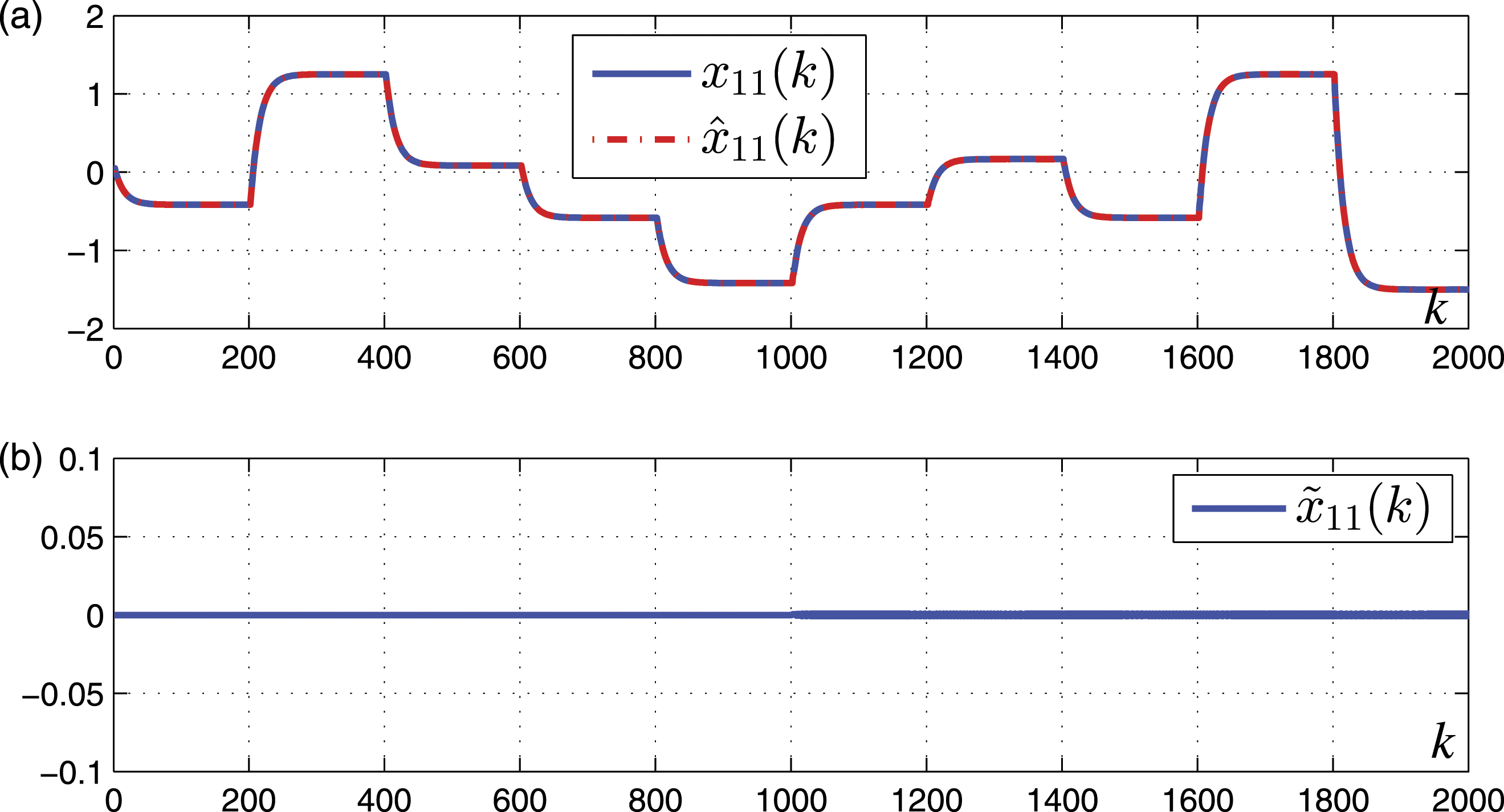
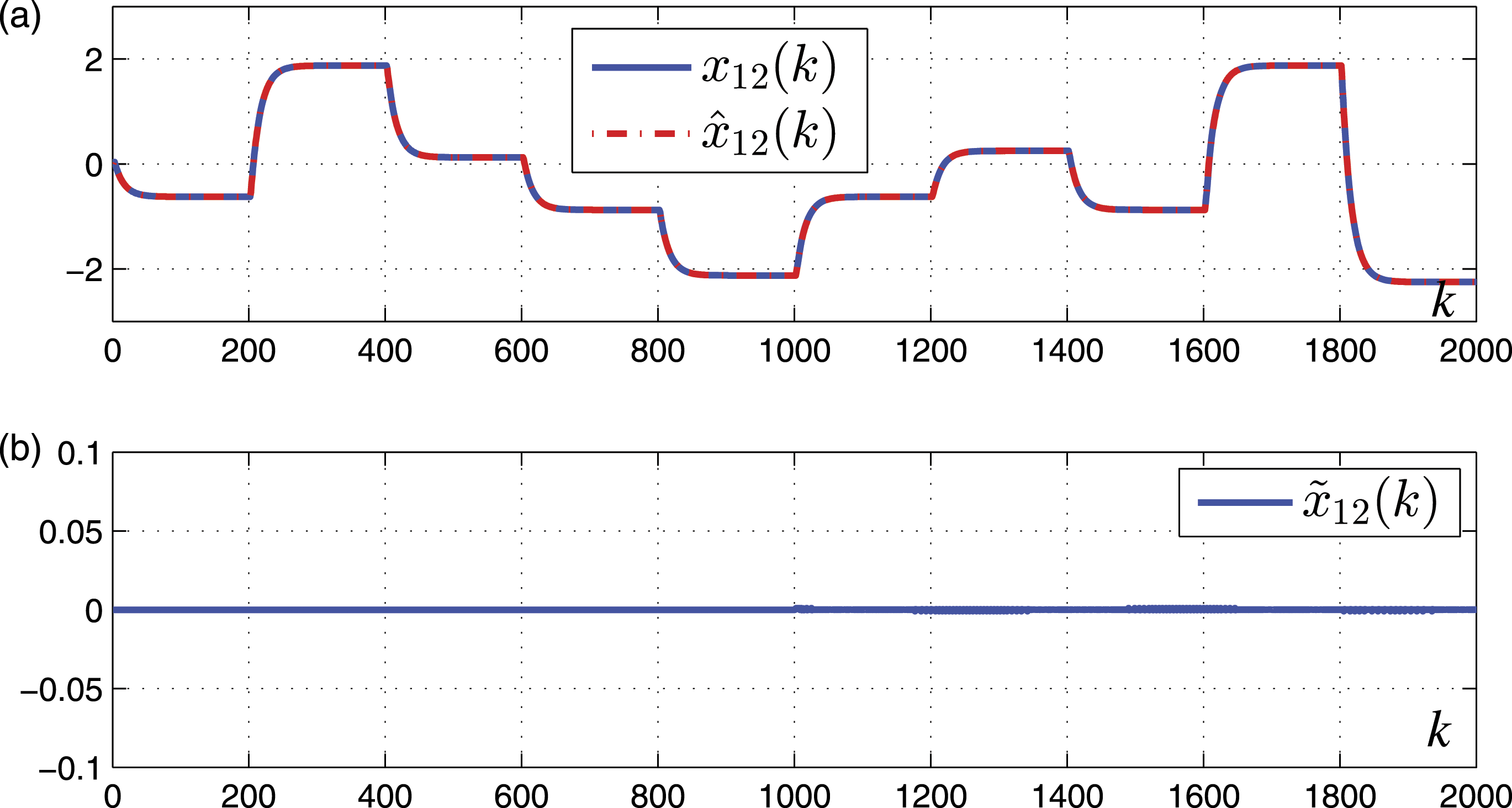
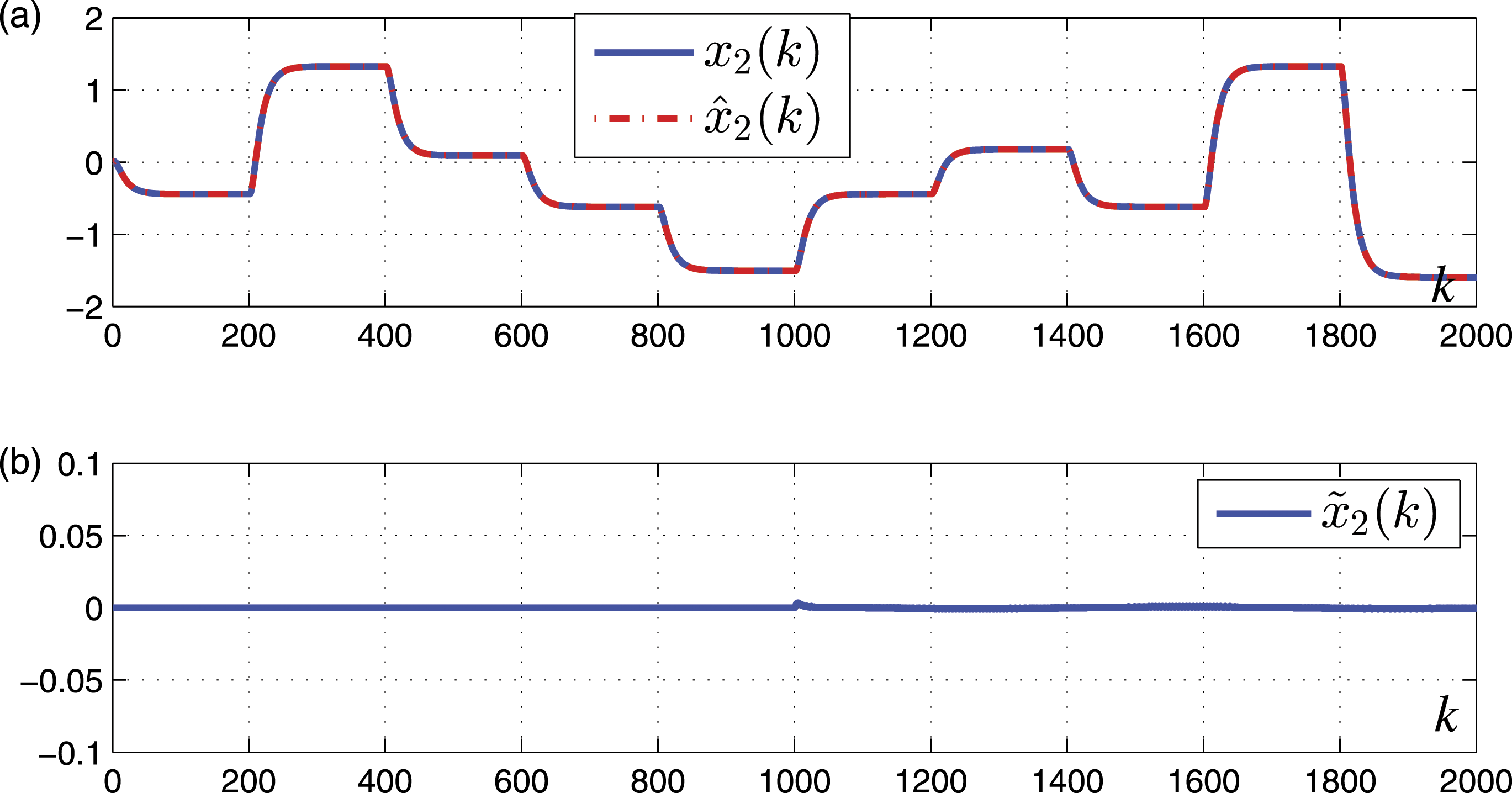
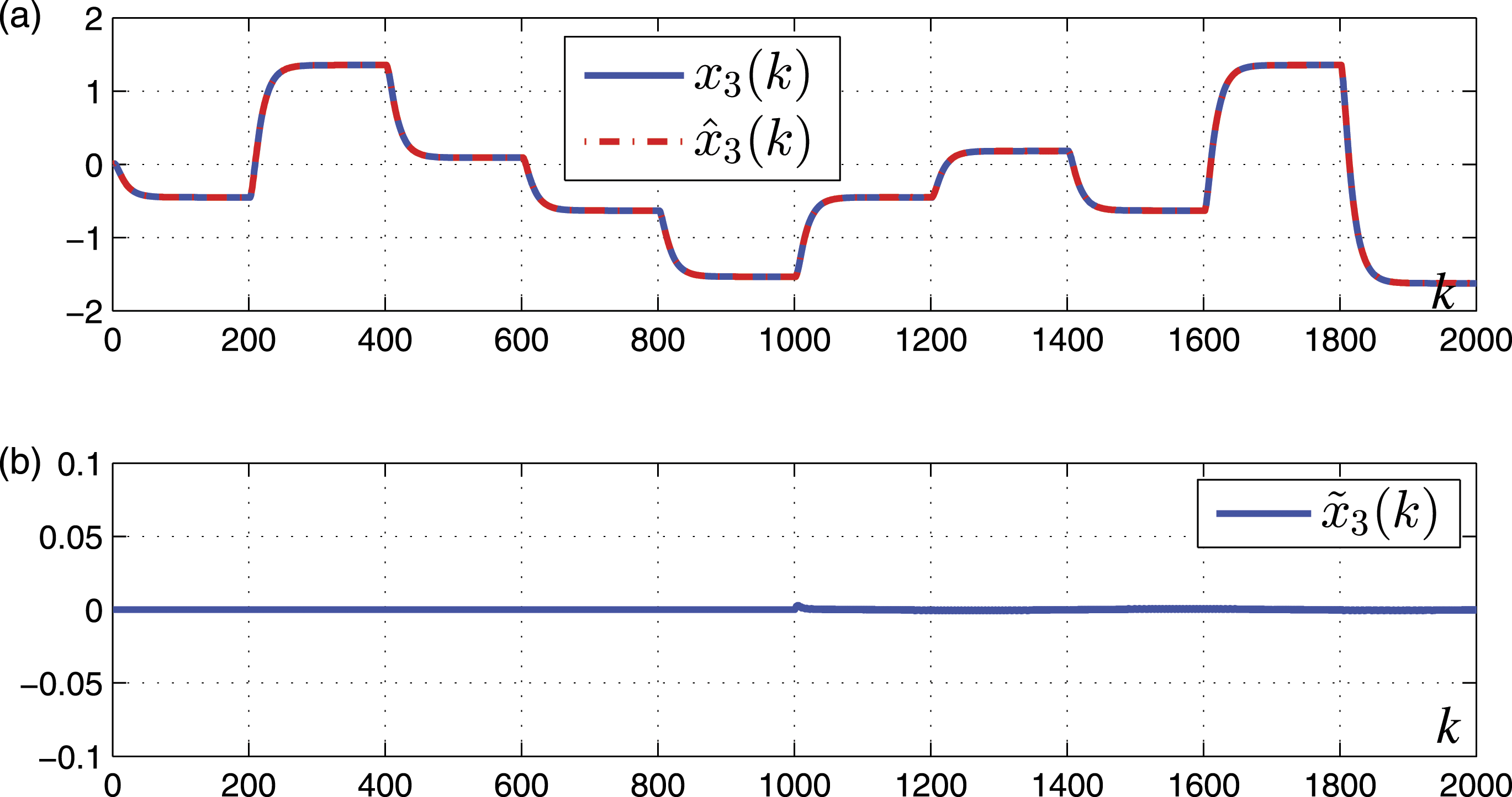
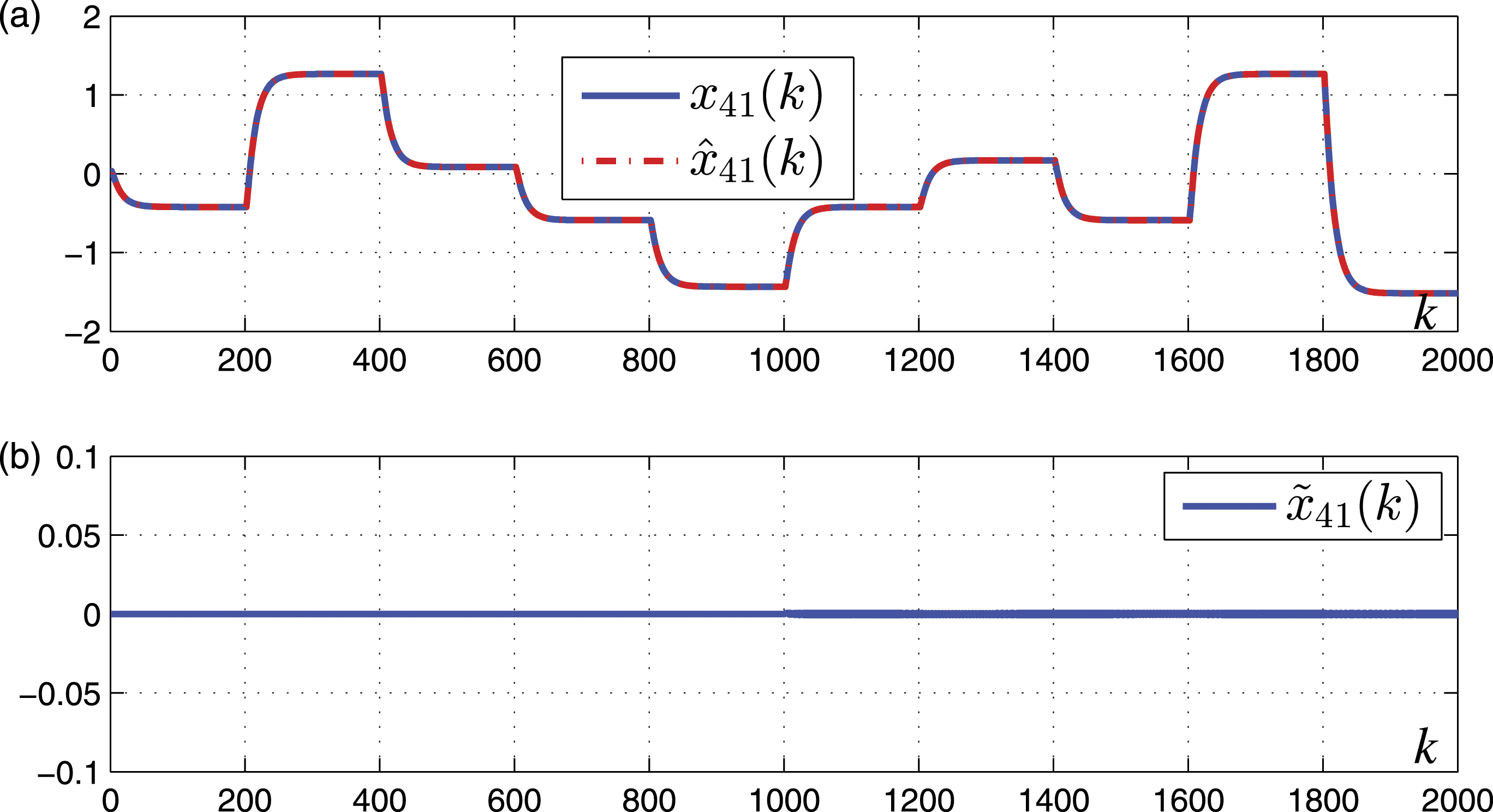
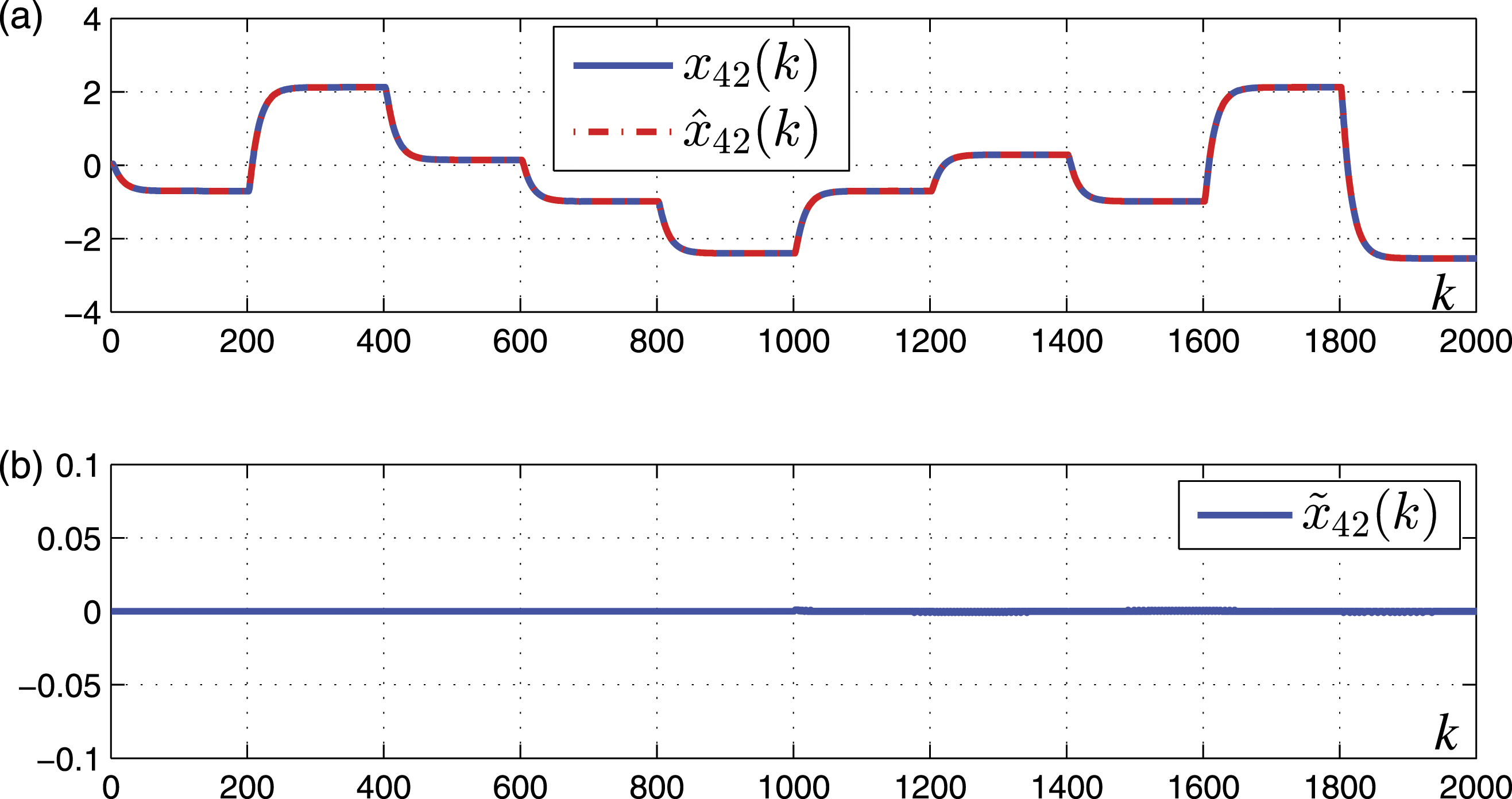
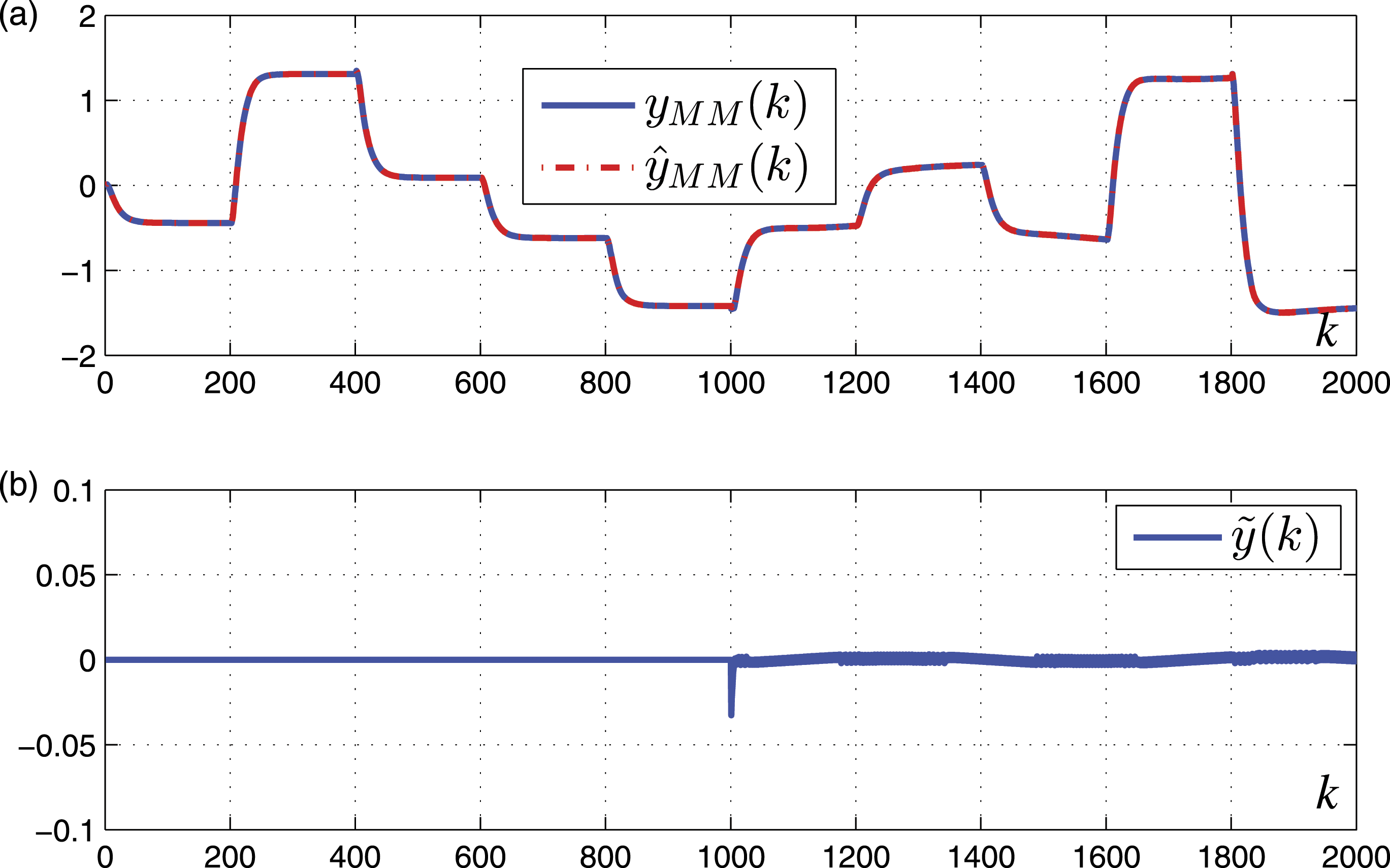
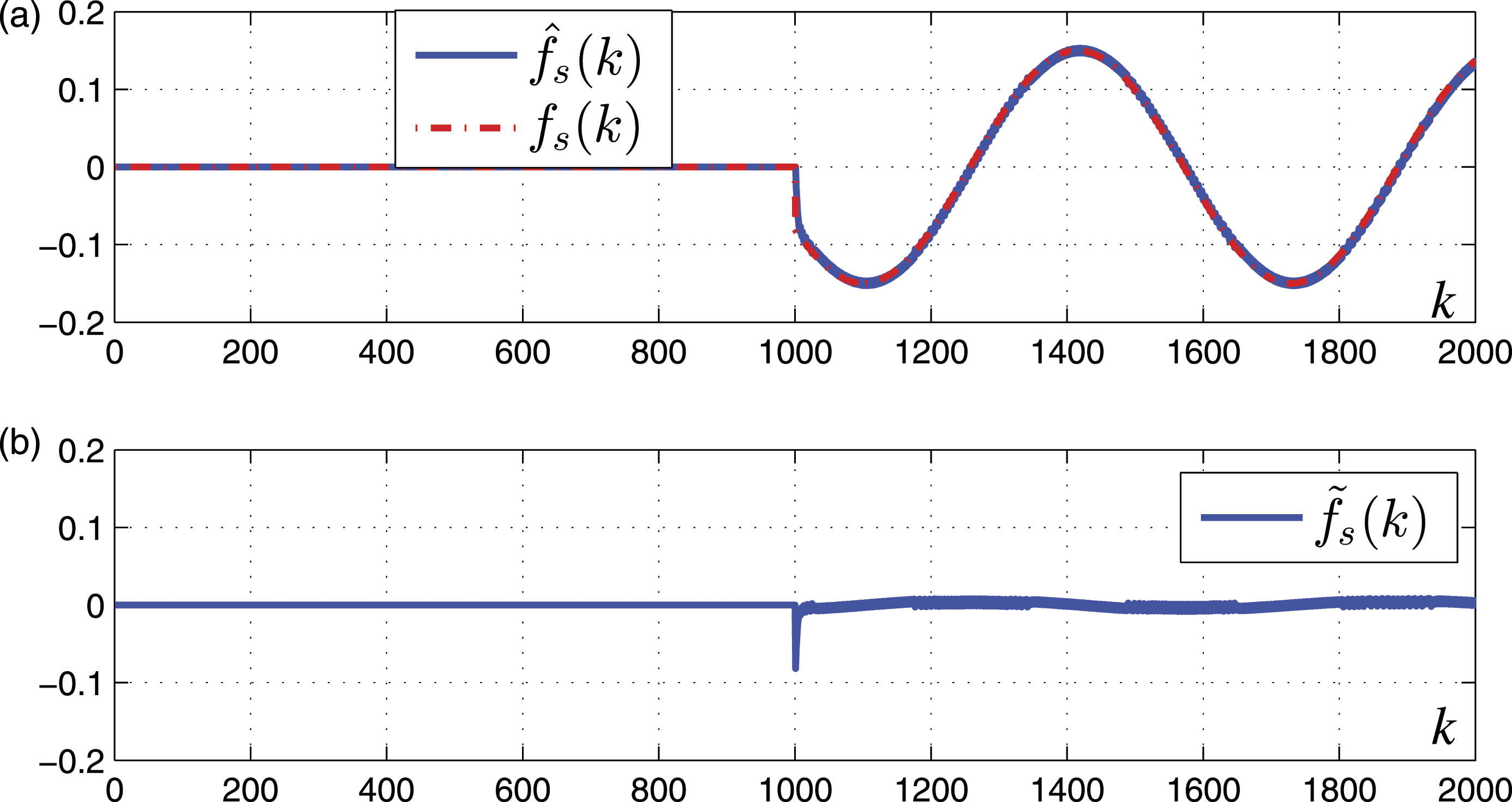
It is clearly seen in Figure 1, Figure 2, Figure 3, Figure 4, Figure 5, and Figure 6 that the estimated states follow accurately the real ones for the 4 partial models. Therefore, the state estimation error is close to zero for all state variables. Then, the proposed sliding mode multiobserver gives satisfactory state estimation with good performances. According to Figure 7, the real multimodel output is reconstructed with accuracy and rapidity despite the presence of the sensor fault affecting the output signal. The reconstructed sensor fault in Figure 8 follows the same shade and amplitude as the real one, which confirms that the sliding mode multiobserver is able to reconstruct sensor faults.
In order to prove the efficiency of the proposed strategy, the sliding mode multiobserver is compared to an unknown input multiobserver (UIMO) (Mejdi et al., 2020). The gain of this multiobserver is calculated without considering any optimization technique. Hence, the obtention of an optimal gain matrix for this multiobserver is a difficult task. The following figure represents the evolution of the real and reconstructed fault (Figure 9). Evolution of sensor fault and its reconstruction with sliding mode and unknown input multiobservers.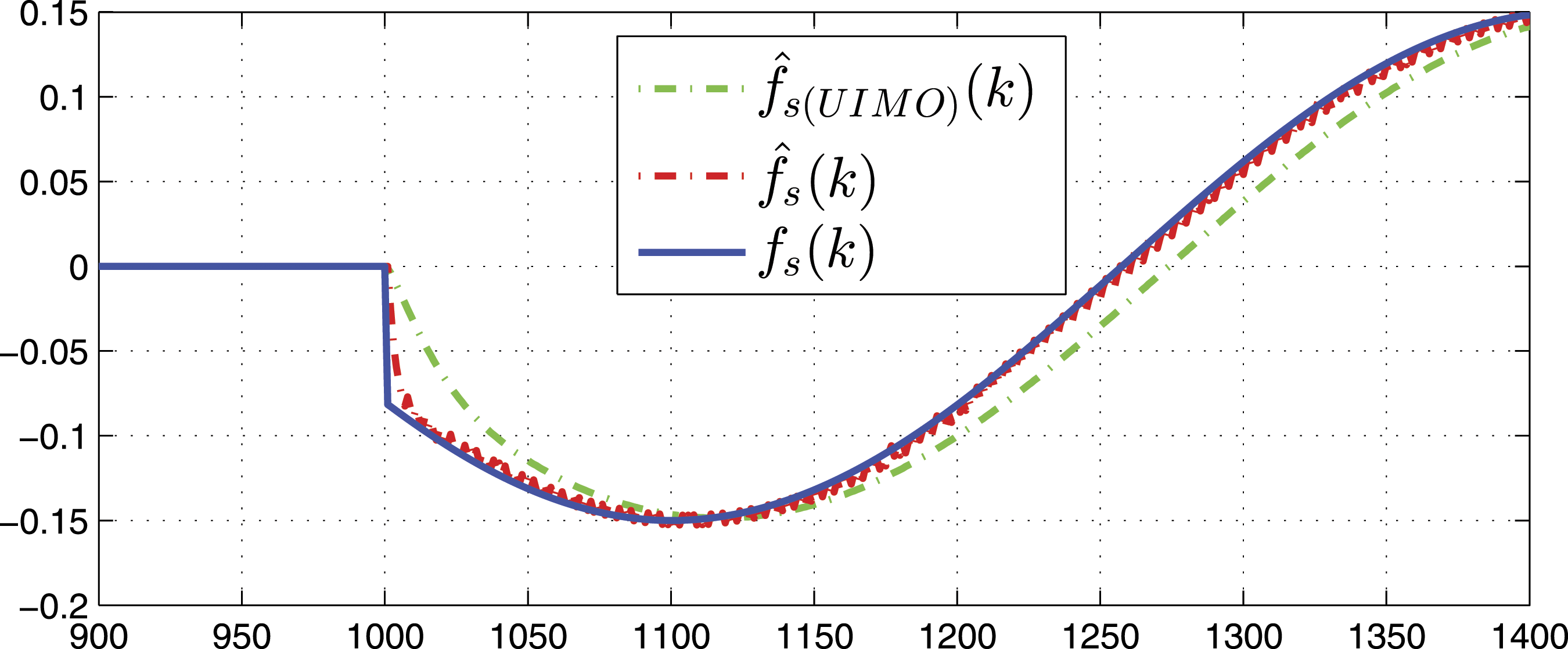
This figure shows the advantages of the proposed strategy in reconstructing sensor faults. The sliding mode multiobserver performs better in terms of rapidity and accuracy.
5. Experimental validation: Transesterification reactor
5.1. System description
The transesterification reaction is the production of fuel from vegetable oils using strong acid or base as a catalyst. The reactor which is able to execute this reaction is equipped with a stirred tank (Figure 10). A heat exchange between the cooling fluid and the reaction mixture is generated inside a jacket. An external servo system is exploited to guarantee the fluid temperature regulation inside this jacket using a set of electric resistors constituting a plate heat exchanger. The transesterification reactor, working in batch mode, allows the transformation of fatty materials (FMs) such as animal fats and vegetable oils into esters and glycerol as follows (Ma and Hanna, 1999) Synoptic scheme of the transesterification reactor.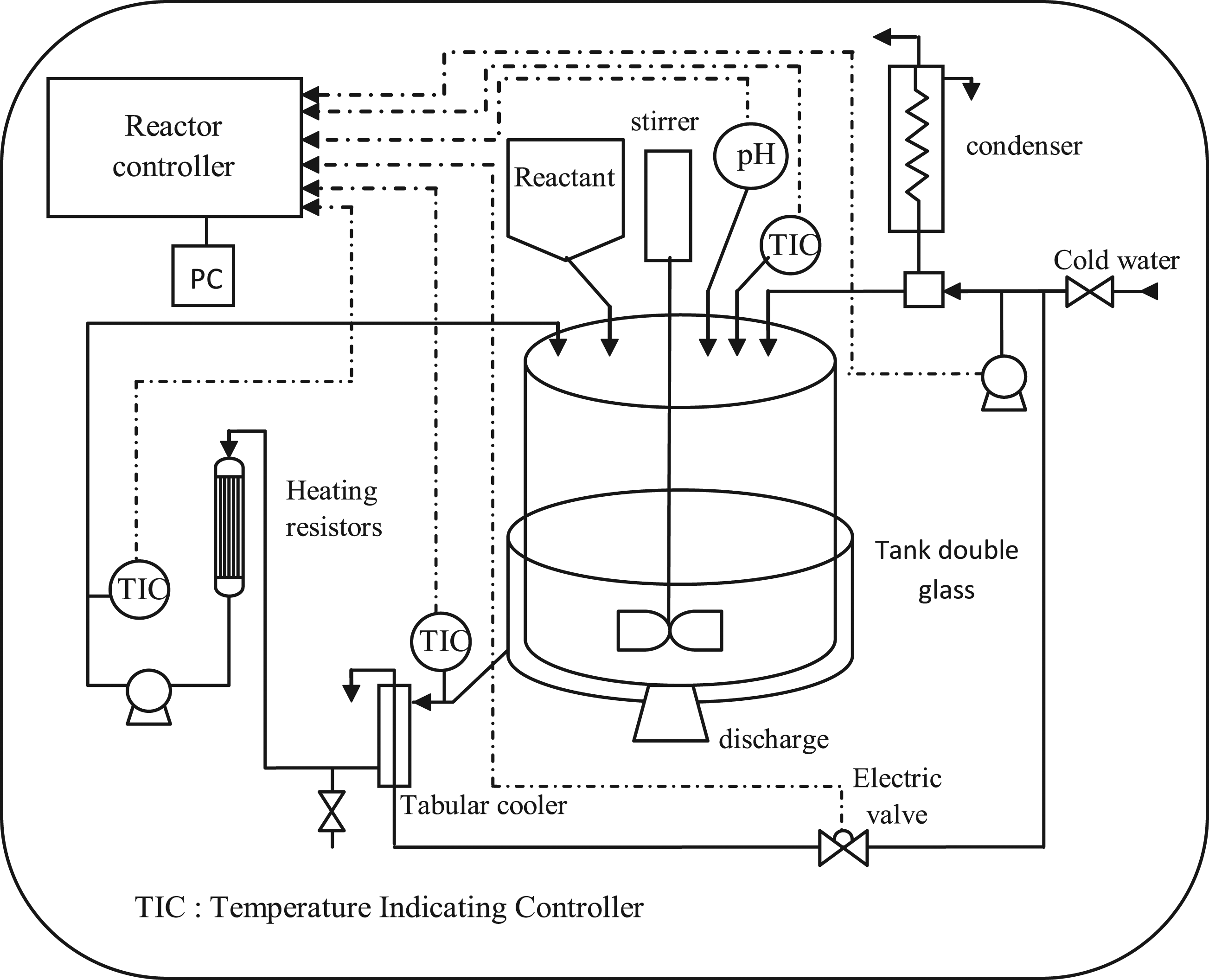

This reaction is, generally, exploited to lower the triglyceride viscosity. A triglyceride molecule is made up of three-carbon glycerol heat group transformed to three fatty acid chains.
Biodiesel is retained as one of the most important fuel and ecofriendly renewable energy. Diesel fuel helps in improving the industrial economy of developing countries especially for the transport of industrial and agricultural goods. The oil/fat triglyceride molecule extracted from fatty acids varies by the length of carbon chain, orientation, and even the position of double bonds in these chains. Therefore, biodiesel allows the decreasing of alkyl ester in long chain fatty acids which is produced by transesterification with lower alcohols or by fatty acids esterification (Meher et al., 2006).
5.2. Multimodel identification
The multimodel identification applied on the transesterification reactor leads to the following multimodel representation:



The centers c i of the given partial models and the dispersion σ d are chosen as follows: c1 = 0.2, c2 = 0.3, c3 = 0.5 and σ d = 0.4.
An additive sensor fault acts on the reactor output from the instant k = 130 and obeys the relation (5). It evolves increasingly between k = 130 and k = 150. Outside this interval, it remains constant.
The resolution of the LMI(s) given in (16) gives the following multiobserver gain
The matrices P and Q are given by
Figure 11, Figure 12, Figure 13, Figure 14, and Figure 15 represent the evolutions of the real and estimated states and the estimation errors of the transesterification reactor. Partial model 1: (a) Evolutions of state 1 and its estimate and (b) evolution of the estimation error Partial model 1: (a) Evolutions of state 2 and its estimate and (b) evolution of the estimation error Partial model 2: (a) Evolutions of state 1 and its estimate and (b) evolution of the estimation error Partial model 2: (a) Evolutions of state 2 and its estimate and (b) evolution of the estimation error Partial model 3: (a) Evolutions of the state and its estimate and (b) evolution of the estimation error 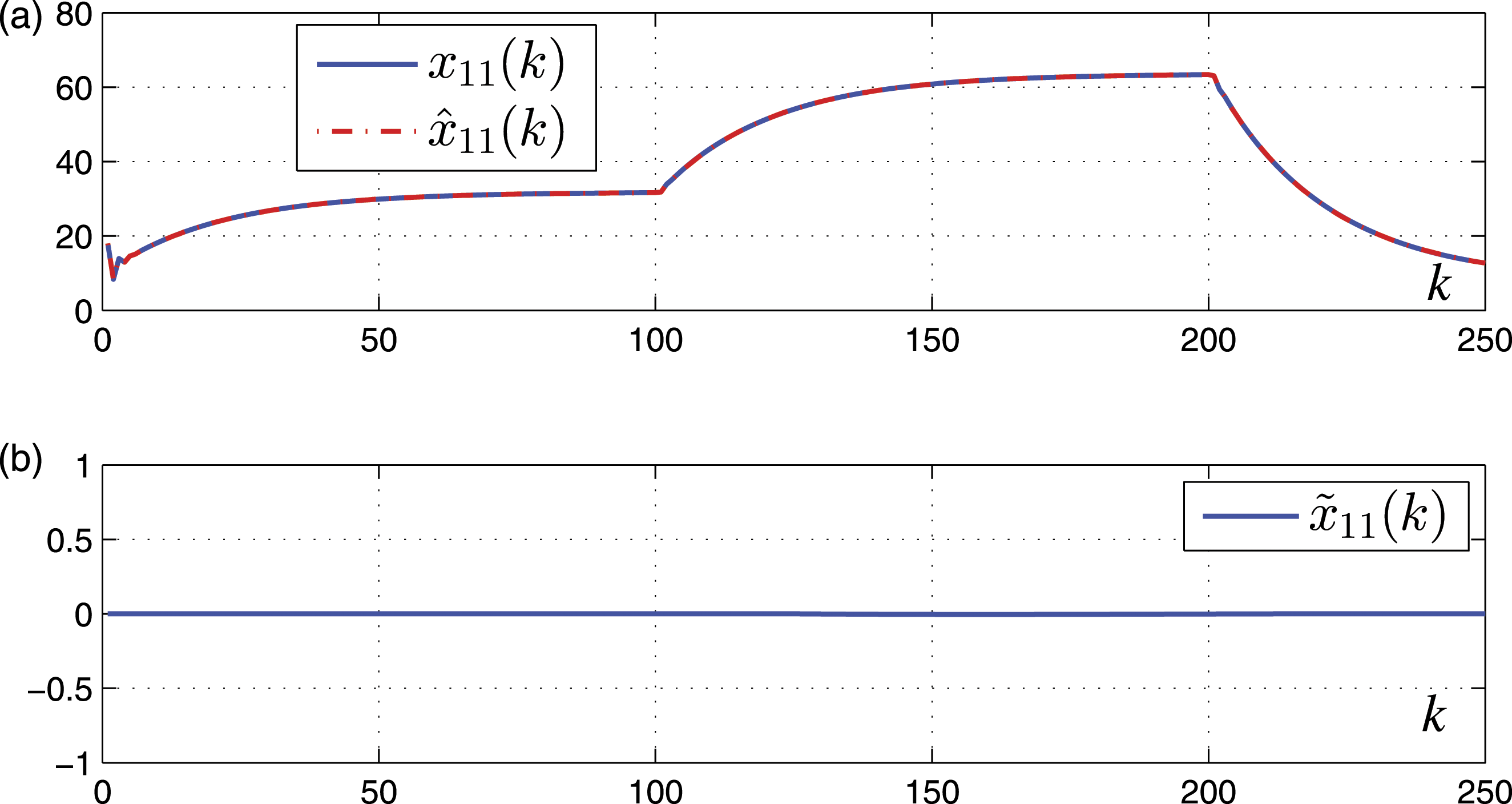
The real and reconstructed multimodel outputs and the output reconstruction error are plotted in Figure 16. (a) Evolution of real and reconstructed outputs and (b) evolution of the output reconstruction error.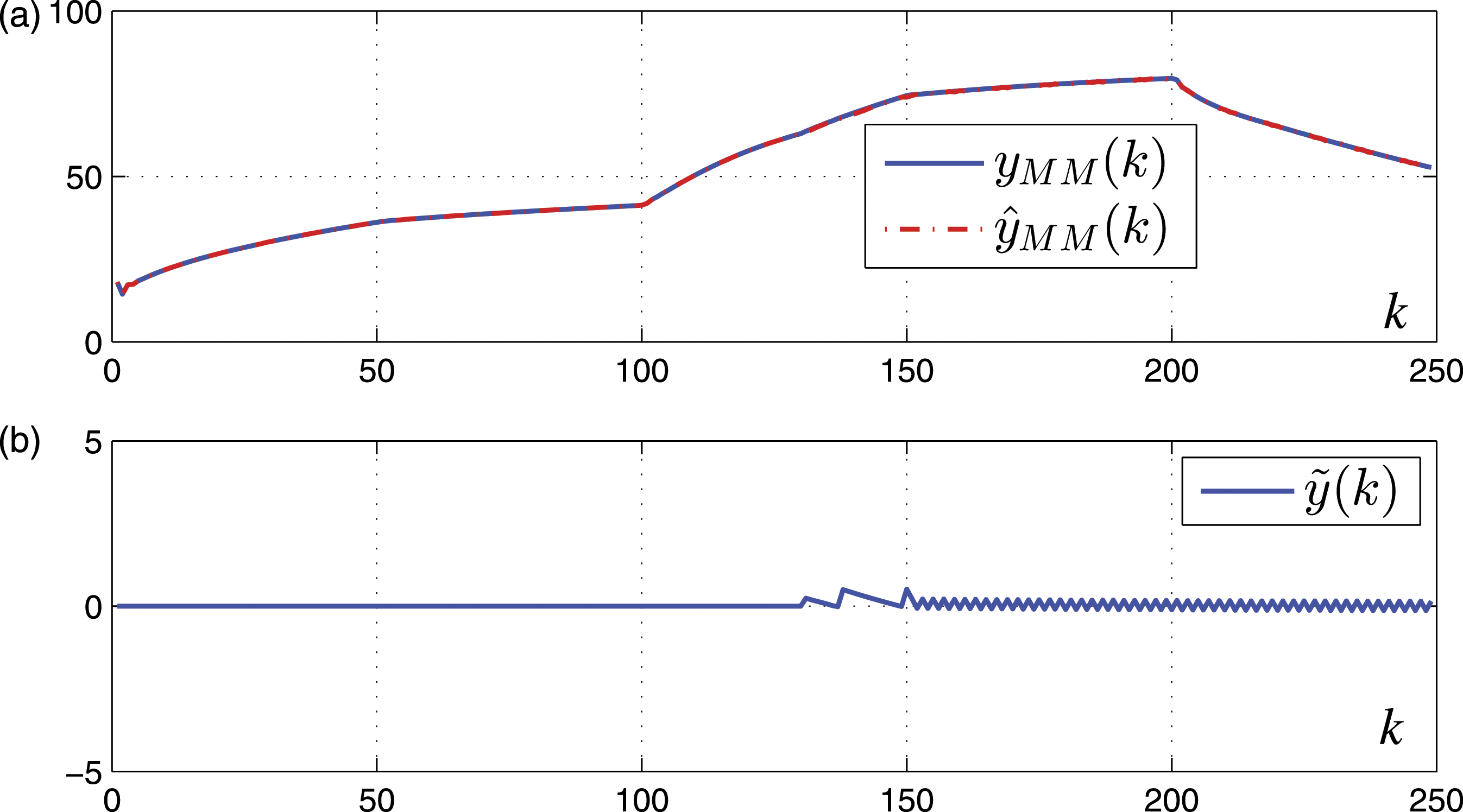
Figure 17 illustrates the evolution of the sensor fault and its estimate and the sensor fault estimation error. (a) Evolution of sensor fault and its estimate and (b) evolution of the sensor fault estimation error.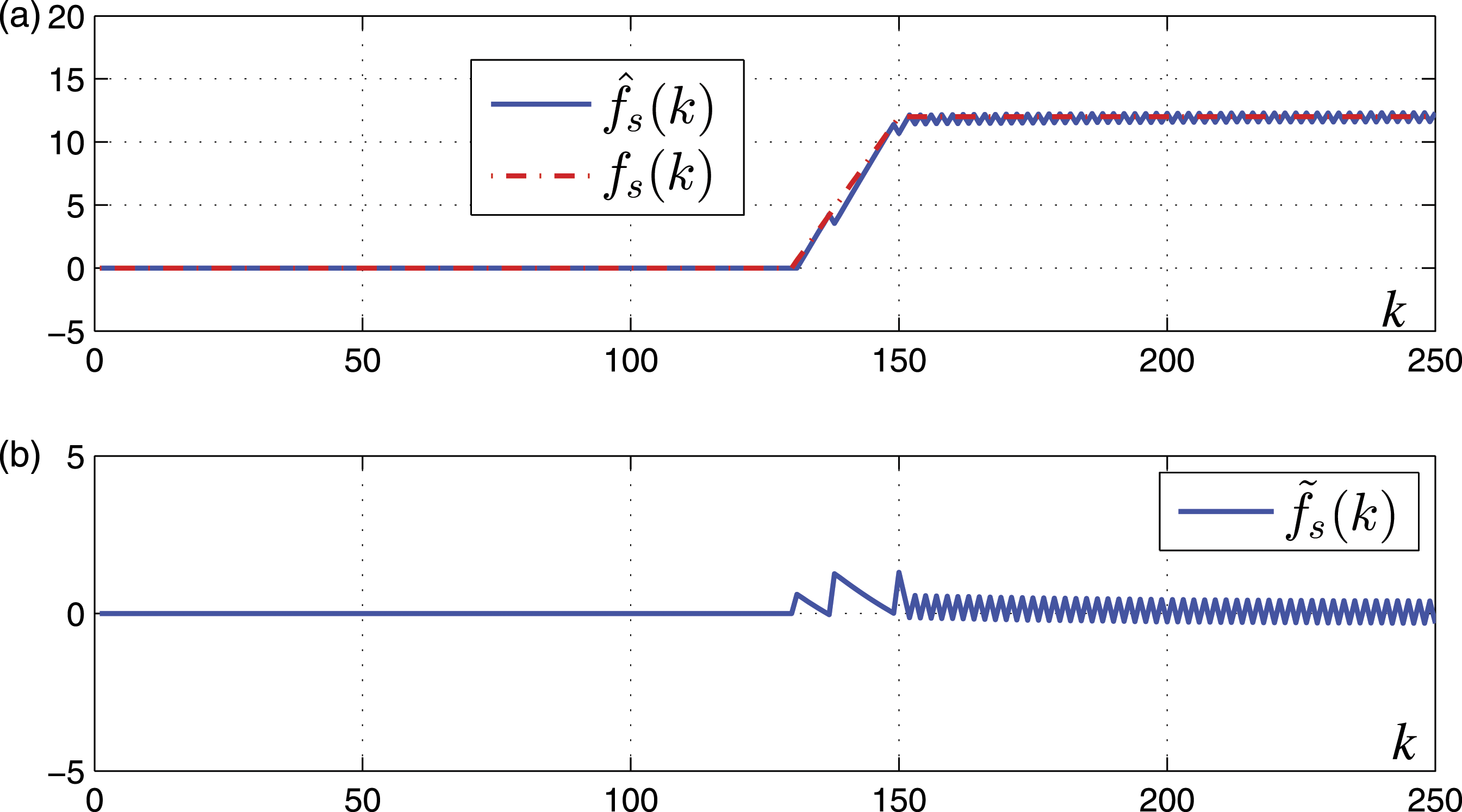
As shown in Figure 11, Figure 12, Figure 13, Figure 14, and Figure 15, even in real time and despite the presence of sensor faults, the proposed multiobserver estimates the different states with good performances. In Figure 16, the multimodel output is reconstructed with a satisfactory accuracy. It’s seen from Figure 17 that the sliding mode multiobserver is able to reconstruct sensor faults with accuracy.
6. Conclusion
In this paper, a novel strategy for estimating states and sensor faults is established for discrete-time nonlinear systems. This system modeling is handled through the uncoupled multimodel approach. A new sliding mode multiobserver is synthesized. Sufficient conditions for the asymptotic stability of the proposed multiobserver are expressed in terms of LMIs obtained using the Lyapunov theory. A simulation example and a real-time application are given to illustrate the effectiveness of the proposed strategy. This strategy gives very satisfactory results for state and sensor fault estimation.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Ministry of Higher Education and Scientific Research-Tunisia.