
Abstract
Space missions present unique challenges for teams, requiring effective communication, coordination, and cooperation under stress and physical strain. As humans venture further into space, communication latency becomes a significant challenge, with delays ranging from seconds to minutes. This latency affects team performance and cognitive load, whether the team consists of humans, machines, or both. Shared mental models can help manage these delays, but the lack of “shared context” due to varied physical environments can impede their development. Extensive astronaut training, lasting 5 to 10 years, makes realistic simulation of space tasks challenging for study participants. Using an Agent-Based Model (ABM) and a scenario built from interviews with Subject Matter Experts (SMEs), this study simulates complex interactions and coordination challenges in space teaming, addressing the complexities and dynamic nature of space missions.
Background
Space missions place teams in highly demanding environments, requiring them to communicate, coordinate, and cooperate effectively under stress and physical strain. These environments not only challenge the mental and physical capabilities of individuals but also highlight the importance of coordination between different agents, such as humans and machines. In future space operations, teams must be able to coordinate under conditions involving both high communication latency and stress.
The challenge of communication latency becomes increasingly significant as humans venture further beyond Earth’s orbit. Since information can only travel at the speed of light, messages between Earth and the Moon take about 2.5 seconds, and between Earth and Mars, the delay can be anywhere from 8 to 42 minutes (Hirsh, Graham, Rochlis, & Harris, 2006). This delay poses unique challenges for teams in space that Earth-based teams don’t face, impacting not just human operators and astronauts but also the integration of machine elements into the team. These delays can lead to increased cognitive load and potentially affect team performance, whether the team consists of humans, machines, or both (Olson, G. & Olson, J., 2003; Lum et al., 2009). However, if team members develop shared mental models, they can better manage these delays (Scholcover & Gilan, 2021). Nevertheless, space missions often suffer from a lack of “shared context” due to the varied physical environments of team members, which can reduce mutual understanding and impede the development of shared mental models (Hinds & Bailey, 2003). This is especially relevant for human-machine teams, underlining the need for thorough training before missions. Moreover, space missions require extensive planning, and astronaut training can last 5 to 10 years, covering a broad range of skills (Olbrich, 2018). This makes it challenging to simulate space tasks realistically for study participants.
Teams, by definition, consist of individuals working together towards a common goal (Salas et al., 1992). In high-risk, distributed team scenarios like those in space missions, the team can be viewed as a complex adaptive system. Agent-based modeling, which views teams as collections of interacting agents (both human and robotic)(Macal & North, 2005), provides a powerful tool for studying these systems through simulation. In this study, we used a scenario built from interviews with Subject Matter Experts (SMEs) to simulate complex interactions and coordination challenges in space teaming. (Yin et al., 2022)We designed an Agent-Based Model (ABM) as a simulation framework to address the complexities and dynamic nature of missions in space.
Approach
Modeling the nominal tasks: This agent-based model (ABM) simulates a spacewalk mission involving three entities: NASA’s Mission Control Center (MCC), the International Space Station (ISS Delta), and an astronaut (ISS Charlie). Figure 1 illustrates the team entities and their interactions. Specifically, within a 30-min simulation length, MCC requests information from the astronaut and Delta, and updates instructions to Delta, Charlie, and Bravo. Here, Bravo represents an additional interaction simulating MCC’s communication with the rest of the team. Around 5 min into the simulation, the spacewalker designated as Charlie becomes untethered during a spacewalk, leading MCC to cease team communication. After the perturbation is triggered, Charlie will no longer send or respond to any messages. MCC has a 50% chance of restoring communication, while Delta has a 10% chance of sending messages to Charlie, simulating people’s behavior in checking communication connections. Throughout the simulation, we track the communication flow within the team, allowing us to compare the simulated data with data collected from human subjects performing this scenario (Yin et al., 2022). Figure 1 shows the team entities and how they interact.
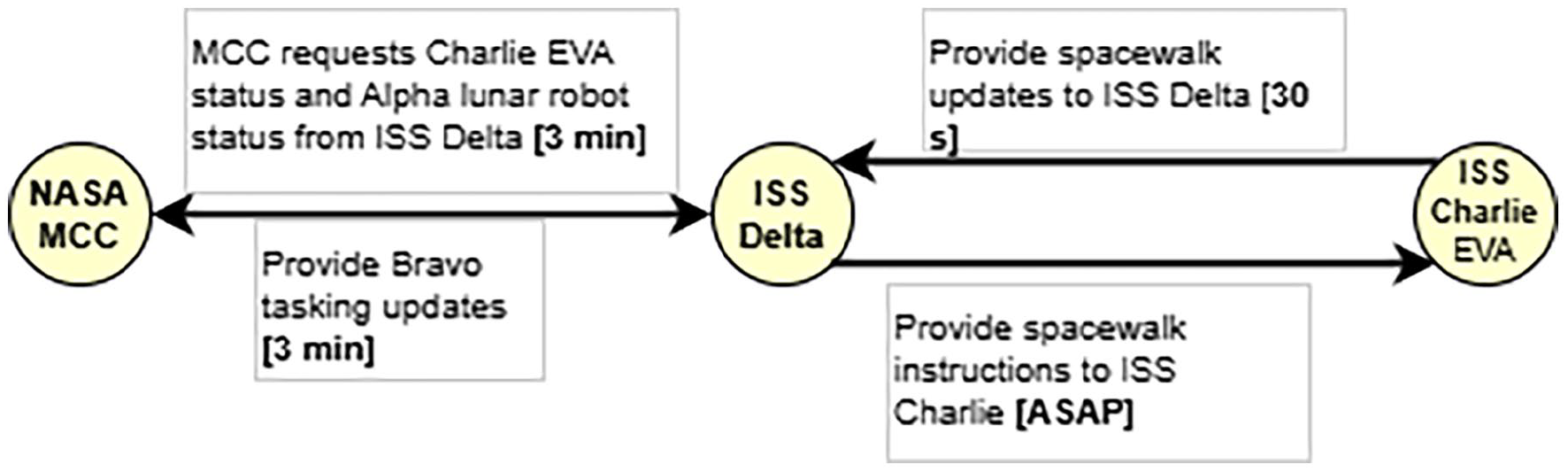
Framework of the agent-based model.
Findings
To demonstrate how the agent-based simulation can be used to evaluate system designs, a series of experiments have been conducted. The current model contains three agents: ISS Charlie, ISS Delta, and MCC. The reason for choosing these three roles was because they were most impacted by the perturbation: Astronaut untethered. Therefore, by studying the demo simulation, we should be able to observe a part of the team’s dynamics. The simulation of the Charlie Untethered perturbation is shown in Figure 2. Around 5:00, when the perturbation was triggered, we can observe an increase in system entropy. Compared to the data collected in the human subjects experiment (Figure 3), when the first perturbation was triggered (the purple zone), there was an increase in the system’s entropy. The same increase in entropy can also be observed when the trigger time was set to 10 min (Figure 4), in this case, indicating that the first perturbation was successfully set up. Other parameters that can be defined include the communication delay (the delay in sending messages) and processing delay (the time taken to process the information). Considering that the model at this stage was only simulating the communication flow between three entities, the changes in delays can be defined later when more entities are added to the model.
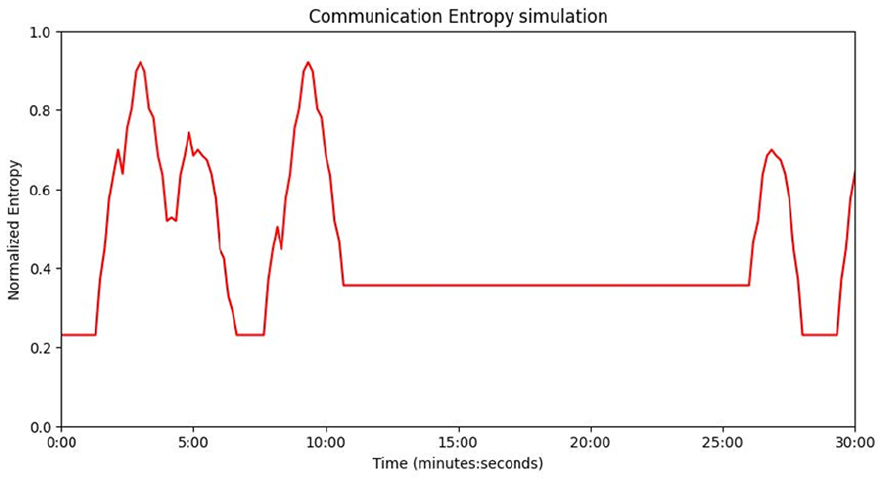
Simulation of perturbation triggered at 5 mins.
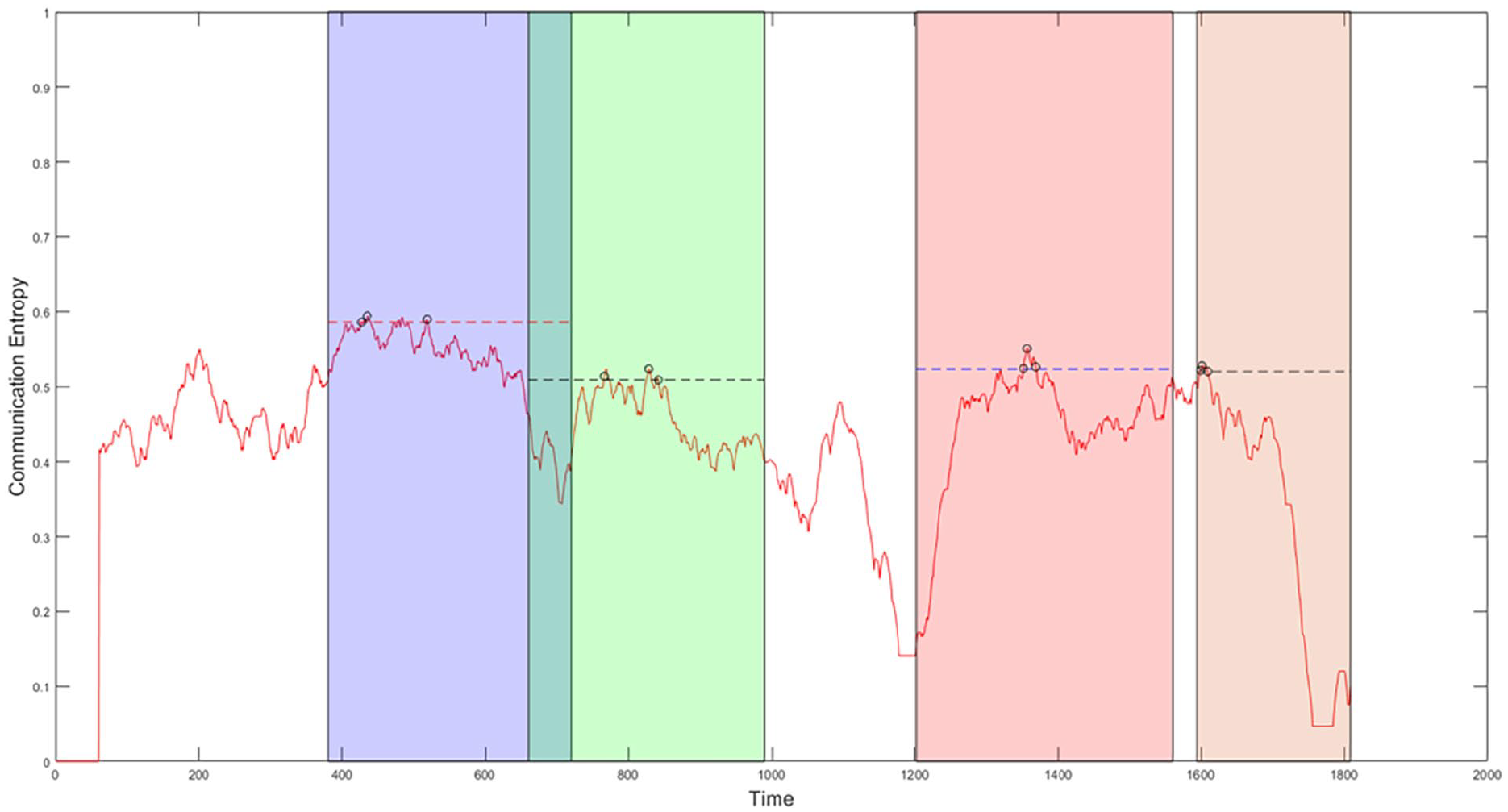
Entropy calculated based on the data collected from human-subjects.
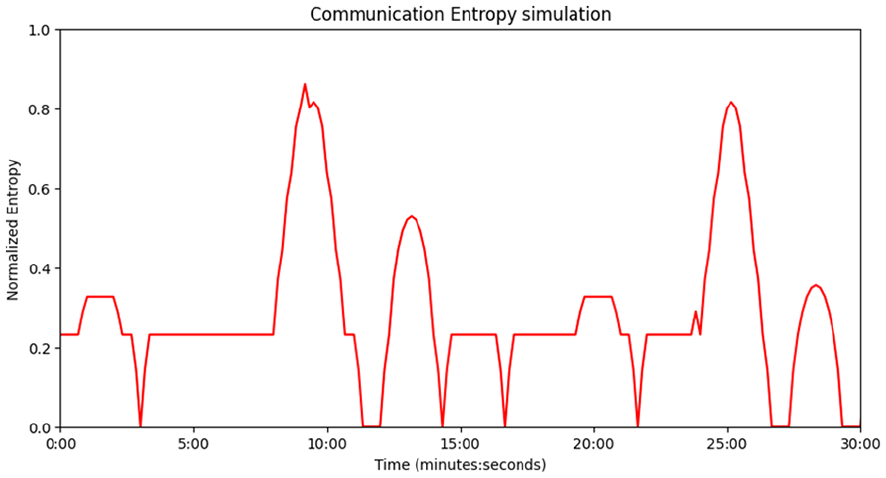
Simulation of perturbation triggered at 10 mins.
Takeaways
Agent-based modeling is widely used for various purposes, and in this study, we aimed to use it to simulate complex systems, such as space tasks. Agent-based modeling offers a simpler way to understand these complex systems (Macal & North, 2005), especially when collecting data from people is difficult or limited. By simulating a team working on space tasks, we can better explore the challenges they face. Introducing different types of perturbations into the simulation makes it possible to observe how the team adapts and the duration required for them to adjust (Grimm et al., 2023), including time delays helps us understand the impact of communication issues on the team. The current model successfully simulated the triggering of a perturbation within three agents and was able to calculate the change in entropy throughout the mission. However, the current version of our model has its limitations; it did not represent team missions with all entities included. Different entities may interact with each other in various ways, such as robots interacting with humans. Furthermore, the original design of the scenario included four different kinds of perturbations, which were not fully incorporated in this simulation. Future research should focus on adding more parameters to the model and creating more accurate simulations that reflect real-world scenarios.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.