
Abstract
This research explores the potential of shared leadership as a complementary approach to function allocation within Human-Autonomy Teams (HATs), particularly in large, multi-agent contexts. Through a literature review of shared leadership in all-human organizational contexts, conducted using three databases, Web of Science, Engineering Village, and Google Scholar, the article identifies and outlines two mechanisms in shared leadership—decentralization and mutual influence—that appear promising for improving team processes and outcomes in HATs. This research underscores the need for developing frameworks or engineering guidance incorporating these mechanisms to enhance adaptability and performance in complex and dynamic environments.
Keywords
Introduction
The advent of sophisticated software and hardware technology has precipitated an increased reliance on machines with escalating levels of intelligence and autonomy across numerous domains, from search and rescue operations to logistics and supply chain management (Ackerman, 2016; Pinto et al., 2014). This paradigm shift necessitates a reevaluation of human collaboration with machines, which are transitioning from automated aids to intelligent teammates capable of functioning independently and leading complex tasks (Hancock et al., 2011). Thus, the dynamics of and designs for sharing or delegating the responsibilities or tasks between human and autonomous agents represent a central research topic in Human-Autonomy Teams (HATs).
The need to share responsibilities through dynamic function allocation that leverages the strengths of both humans and autonomous agents is evident, particularly in domains where adaptability and teamwork are paramount (Pinto et al., 2014; Roth et al., 2019). As a result, research proposing dynamic allocation in HAT has been steadily increasing. Existing dynamic allocation models largely focus on collaboration between humans and autonomous agents by monitoring and adapting to cognitive states of agents: multi-directional trust or situation awareness (Aldridge & Bethel, 2023; Landfair et al., 2022; Xu & Dudek, 2015). However, the adoption of these methods has been limited, owing to the need for research to advance sophisticated systems that must monitor, interpret, and fine-tune real-time adaptation to cognitive states accurately (Landfair et al., 2022; Rauffet, 2023).
Despite the growing research interest, current dynamic function allocation principles for HAT may be limited for large teams and organizations with numerous human and autonomous agents. The majority of the function allocation frameworks in HAT literature have focused on single-human and single-autonomous agent teams (Brandt et al., 2018; Few et al., 2006), multi-human and single-autonomous agent teams (Bishop et al., 2020; Demir et al., 2019; Linegang et al., 2006; Lyons & Stokes, 2012; Schaefer et al., 2019) or single-human and multi-autonomous agent teams (J. Y. Chen et al., 2013; Lange & Gutzwiller, 2016). While providing valuable insights into interaction and collaboration for HAT, these studies have not fully explored the dynamics and complexities of teams involving multiple human and autonomous agents that are more representative of real-world organizations. As technology advances and the potential for deploying multiple autonomous agents increases, it is imperative to investigate the challenges and opportunities associated with HAT composed of multiple human and autonomous agents.
This article explores the potential of shared leadership as a complementary approach to function allocation within the context of HAT. Shared leadership is an informal, emergent, and distributed form of leadership that has shown to promote teamwork and collaboration in dynamic environments of human organizations (Carson et al., 2007; Pearce & Sims Jr, 2002). In HATs, shared leadership represents another approach for engineering flexible and adaptive function allocation, by enabling the most appropriate agent(s)—whether human or autonomous—to assume leadership roles based on their capabilities and the task requirements. Despite extensive research on shared leadership, the literature lacks theoretical discussion and empirical studies on the application of shared leadership for HATs. This literature review identifies and outlines mechanisms of shared leadership in all-human teams that could be invaluable to adapt for the HAT context. Mechanisms refer to the underlying processes or methods through which shared leadership functions are operationalized within a team or organization. The mechanisms in shared leadership from this review could offer inspirations for the design and management of HATs.
Methodology
The literature review included searches on three databases—Web of Science, Engineering Village and Google Scholar—using the following keywords: “shared leadership,” “policies,” “mechanisms,” “characteristics,” and “traits.” The search was limited to publications with, at minimum, one citation to ensure relevance and currency in the evolving field of autonomous systems.
The down-selection process involved removing duplicates, screening titles and abstracts for relevance, followed by a full-text review to ensure that the articles met the inclusion criteria. Articles pertaining to organizational psychology, management theory (as it relates to teamwork in dynamic work environments), or within the context of human-autonomy teams or human-machine teams were the main focus of this literature review. The process yielded 30 articles for in-depth review to identify mechanisms of shared leadership in all-human teams relevant for the HAT contexts.
Results
The literature review uncovered common perspectives of shared leadership. Predominantly, shared leadership is defined as a “dynamic, unfolding, interactive influence process among individuals, where the objective is to lead one another toward the achievement of collective goals” (Pearce & Sims Jr, 2002). The literature presents three primary perspectives of shared leadership: the Behavioral perspective, which emphasizes the leadership that stems from members’ leadership behaviors; the Structural perspective, which emphasizes leadership influence and team member interactions; and the Collaborative Cognition perspective, which emphasizes problem-solving through shared knowledge or understanding within teams.
The Behavioral perspective employs the full-range leadership framework: aversive, directive, transactional, transformational, and empowering behaviors; or the big-5 personality traits: extraversion, agreeableness, conscientiousness, openness to experience and emotional stability, to uncover behaviors required for shared leadership (N. Chen & Rau, 2017; Ensley et al., 2006; Hoch & Dulebohn, 2017; Hoch & Morgeson, 2014; Imam & Zaheer, 2021; Krier, 2022; Lyubykh et al., 2022; Mayer et al., 2023; Pastor & Mayo, 2002; Pearce & Sims Jr, 2002; Sivasubramaniam et al., 2002).
The Structural perspective employs decentralization, defined as the authority to make decisions for the entire team or the distribution of leadership; and mutual influence mechanisms, defined as the reciprocal act of leading and following or negotiation or participative behavior; are often employed simultaneously (Alizadeh et al., 2017; Carson et al., 2007; Carte et al., 2006; Ding et al., 2019; Drescher et al., 2014; Erkutlu, 2012; Geib & Boenigk, 2022; Klasmeier & Rowold, 2020, 2022; Liu et al., 2022; Mayer et al., 2023; Mehra et al., 2006; Muethel et al., 2012; Muller et al., 2018; Pastor & Mayo, 2002; Pearce & Sims Jr, 2002; Robert, 2013; Sivasubramaniam et al., 2002; Spedding et al., 2023; Sweeney, 2022; Van Dalfsen et al., 2023).
The Collaborative Cognition perspective utilizes multi-directional information sharing or communication (Ensley et al., 2006; George et al., 2002; Zhang et al., 2012).
The review of shared leadership literature revealed that articles utilizing the Structural perspective reported the highest number of studies examining its relationship with various outcome measures, specifically 15 articles on mutual influence and 10 on decentralization (refer to Table 1). Second, the Behavioral perspective which emphasizes leadership styles and personality traits were reported in six and one article, respectively. Third, the Collaboration Cognition perspective, employing shared vision or goals was reported in four articles. Similarly, the articles utilizing the Structural perspective also reported the highest number of studies examining its relationship with process measures as Table 1 indicates that mutual influence and decentralization were both investigated in 13 articles. Second, the Behavioral perspective, employing leadership styles was studied in three articles and personality traits in two articles. Finally, the Collaboration Cognition perspective, employing shared vision or goals was reported in three articles.
Number of Articles Reporting Outcome and Process Measures Significantly Impacted by Shared Leadership Mechanisms.
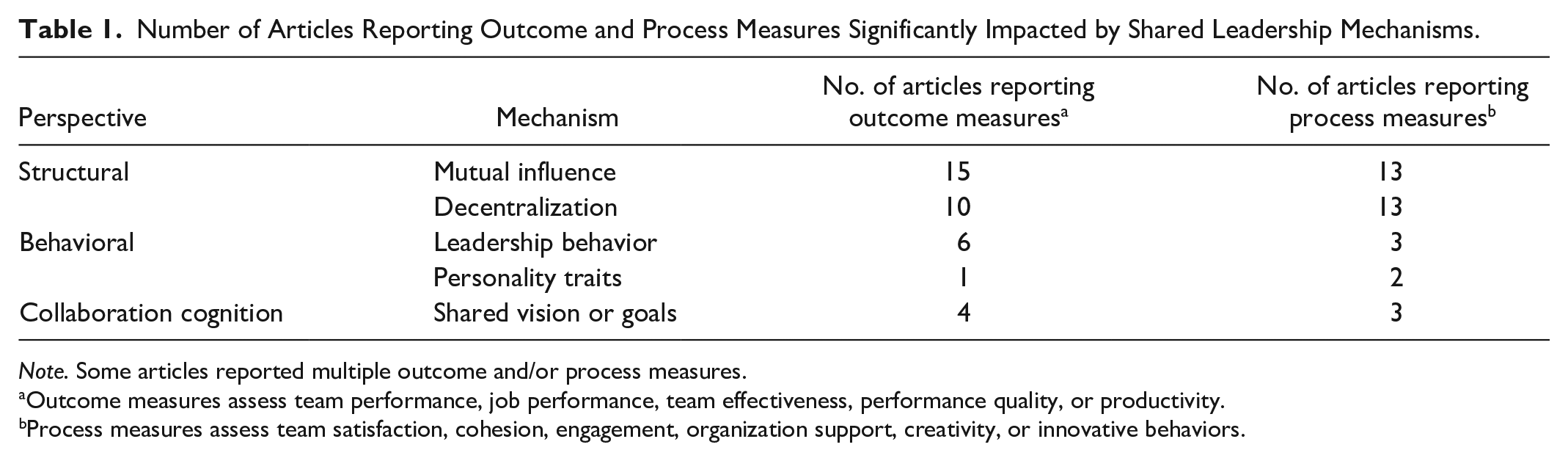
Note. Some articles reported multiple outcome and/or process measures.
Outcome measures assess team performance, job performance, team effectiveness, performance quality, or productivity.
Process measures assess team satisfaction, cohesion, engagement, organization support, creativity, or innovative behaviors.
These results must be interpreted with caution, as the prevalence of the Structural perspective in the literature on shared leadership may have disproportionately influenced the amount of empirical evidence on this concept, potentially skewing the findings. It is noteworthy that some articles reported multiple outcome and process measures.
Discussion
This literature review underscores the transformative potential of shared leadership in enhancing team dynamics, which are essential for effective team functioning in dynamic settings, and ultimately team performance. A central finding is the pivotal role of decentralized leadership and mutual influence, which collectively foster a collaborative environment conducive to improved outcomes. Decentralization ensures an equitable distribution of leadership responsibilities, empowering agents to contribute based on their unique strengths (Carson et al., 2007; Krier, 2022). Mutual influence facilitates a reciprocal exchange of ideas and feedback, enhancing decision-making and task execution (DeRue et al., 2015; Muethel et al., 2012).
Decentralization in HAT can be fostered through allowing autonomous agents to assume leadership functions based on their capabilities, knowledge of the environment, and current task requirements (de Visser et al., 2018). Decentralization could be enabled through continuous assessment of performance and capabilities of both human and autonomous agents, with roles reassigned as needed to optimize team performance (J. Y. Chen & Barnes, 2014; Mioch et al., 2018). Alternatively, embedding decentralization in HAT could empower autonomous agents to make certain decisions within predefined parameters, improving agents’ participation and reducing reliance on humans (Jay et al., 2016; Lyons & Stokes, 2012). Embedding decentralization could leverage the unique strengths of both human and autonomous agents while safeguarding human involvement in critical situations (Endsley, 2015).
Mutual influence in HATs can be fostered through facilitating participative behavior between agents (Lyons & Stokes, 2012; McNeese et al., 2018). Autonomous agents should be designed to be proactive in certain situations rather than relying on human inputs. Enabling mutual influence would allow for the integration of diverse expertise (Fallon et al., 2020; McNeese et al., 2018). Additionally, observable behaviors between agents could be critical for mutual influence and thus effective shared leadership in HATs, providing clear delineation for leadership to shift between human and autonomous agents (Kwon et al., 2019).
To fully realize the potential of shared leadership in HATs, future research should focus on developing collaborative problem-solving frameworks that explicitly employ decentralization and mutual influence mechanisms. While some researchers have begun to explore the dynamic nature of HAT interactions and the importance of interdependence of agents (O’Neill et al., 2023), frameworks for collaborative problem-solving in multiple human and autonomous agent systems remain nascent. By addressing these areas, HATs could achieve the flexibility required for enhancing team effectiveness in complex and dynamic environments.
Conclusion
This literature review examined shared leadership mechanisms as complementary approach to existing ones in function allocation for multi-agent HAT contexts. The review highlighted the significance of decentralization and mutual influence in enhancing team processes and outcomes. Decentralization fosters more equitable distribution of leadership functions (J. Y. Chen & Barnes, 2014; de Visser et al., 2018), while mutual influence fosters reciprocal exchange of agents’ knowledge (Kwon et al., 2019; Lyons & Stokes, 2012). This research advocates for the development of collaborative frameworks that clearly incorporate these mechanisms to enhance adaptability and performance in large multi-agent HATs, paving the way for more effective human-autonomy collaboration across diverse fields. Future empirical studies should assess these principles in real-world settings.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the National Science Foundation for the awarded project entitled “Leadership Emergence for Synchronous Human-Autonomy Teaming (#2212386).