
Abstract
Interacting with domestic service robots (DSRs) will change from one-to-one to one-to-multiple, forming new possibilities for reciprocal relationships among DSRs and humans. We distributed an online questionnaire to collect preferences and stances regarding DSRs. Respondents were introduced to one of four use cases where a cooking robot and a cleaning robot were working simultaneously in the home. Data was obtained from 147 respondents who own a cleaning robot. General stances toward DSRs reflect concerns about usability, attitude, and effort. Competency and control concerns were further emphasized for the unfamiliar cooking robot. Trust corresponded with familiarity, understanding of robots’ competencies, and reliability. Respondents were reluctant to allow the cleaning and cooking robots to interact without their consent. Barriers to adopting multiple connected robots in the home need to be mapped and addressed in future studies.
Introduction
Domestic service robots (DSRs) are becoming more capable and affordable, with a growing trend of using robots at home (Cavallo et al., 2014). Sales statistics support this trend. In 2023, the household robot market was valued at over $10B, with a compound annual growth rate of 19.3% for 2024 to 2032 (GMI, 2024). Meal preparation and house cleaning are the most frequent and time-consuming domestic chores. Further, since the COVID-19 pandemic, more people have been working from home or alternate working from home and at their workplace, fortifying the need for more support in domestic chores. Bittman et al. (2004) claimed that domestic technology rarely reduces and even, paradoxically, produces some increases in domestic labor.
As more DSRs are introduced into the home, human-robot interaction will not be limited to one-to-one user-robot interactions. Instead, users will interact with multiple robots simultaneously or sequentially to complete different tasks. This requires richer analyses of these reciprocal relationships as well as people’s stances, challenges, and preferences. There are knowledge gaps in making the interaction with multiple robots understandable for nonexpert users and how to design robotic systems that can collaborate and predict others’ states and actions (see Ulfert et al., 2024). Establishing trust is essential for effective human-robot collaboration (Kaplan et al., 2021), as humans need to perceive robotic systems as trustworthy (Chen et al., 2018).
A taxonomy proposed by Tan et al. (2019) for multiple service robot environments highlights the importance of addressing planned and unplanned events like failures or malfunctions. While this taxonomy lays the foundation for interactions in multiple robot environments, it remains unclear to what degree people will accept DSRs to interact without their owner’s event-related consent or acknowledgment or the degree to which users will be willing to delegate authority to one DSR or more (see Olson & Sarter, 2001; Thropp et al., 2018). Specifically, it is essential to learn more about how people expect DSRs to act in situations of failure (Honig & Oron-Gilad, 2018) and how trust affects these relationships when people are at home or remotely.
Direct communication among DSRs can support multitasking, reduce the duration of domestic tasks, and moderate user effort. To illustrate, instead of a user calling a cleaning robot to clean the kitchen, the cooking robot could coordinate directly with it, if permitted. While the potential benefits are clear, we are unfamiliar with research efforts to develop user-centered multi-robot systems for nonexpert users in domestic settings. Table 1 illustrates four challenges.
Challenges in Multiple DSR Systems.
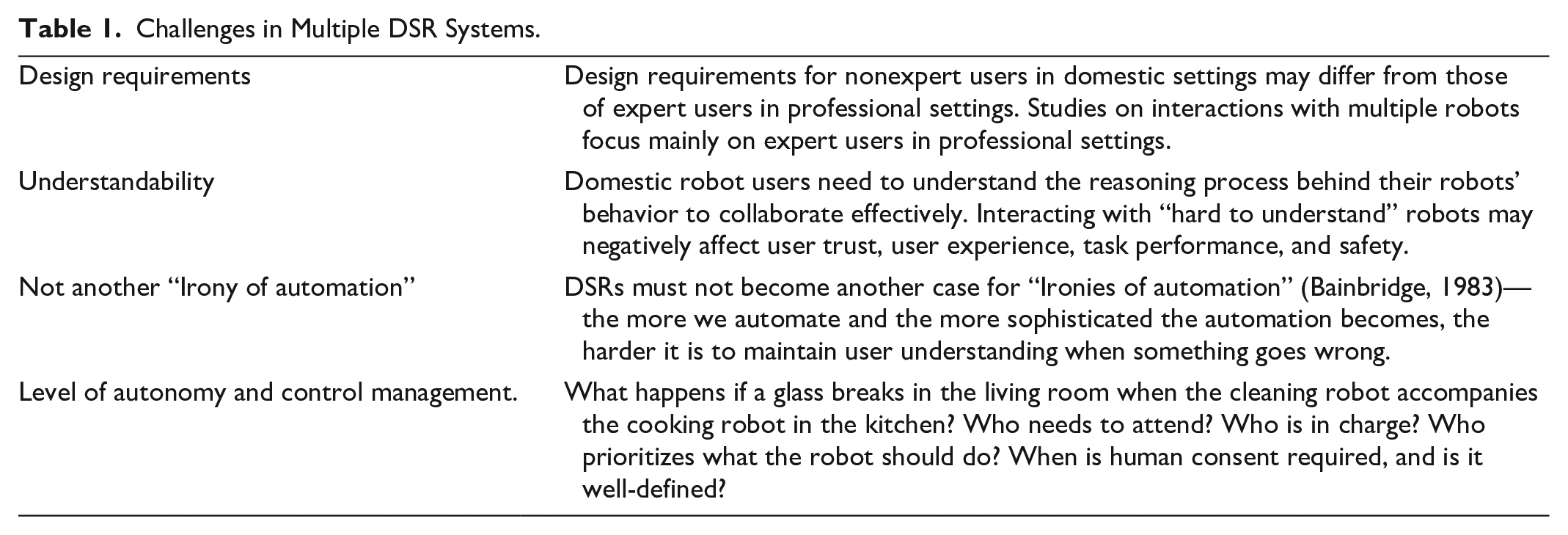
Figure 1 illustrates the exploration space of the current work. We explore aspects related to the introduction of multiple connected DSRs for the home by looking at (1) Stances, concerns, and preferences regarding DSRs; (2) Differences in perceptions and trust of a novel robot versus a more familiar one when the robots function well or a malfunction occurs; and (3) Preferences regarding the level of autonomy that prospective users of DSRs want in a multi-robot environment when the user is at home or operating remotely, relative to the malfunctioning robot.
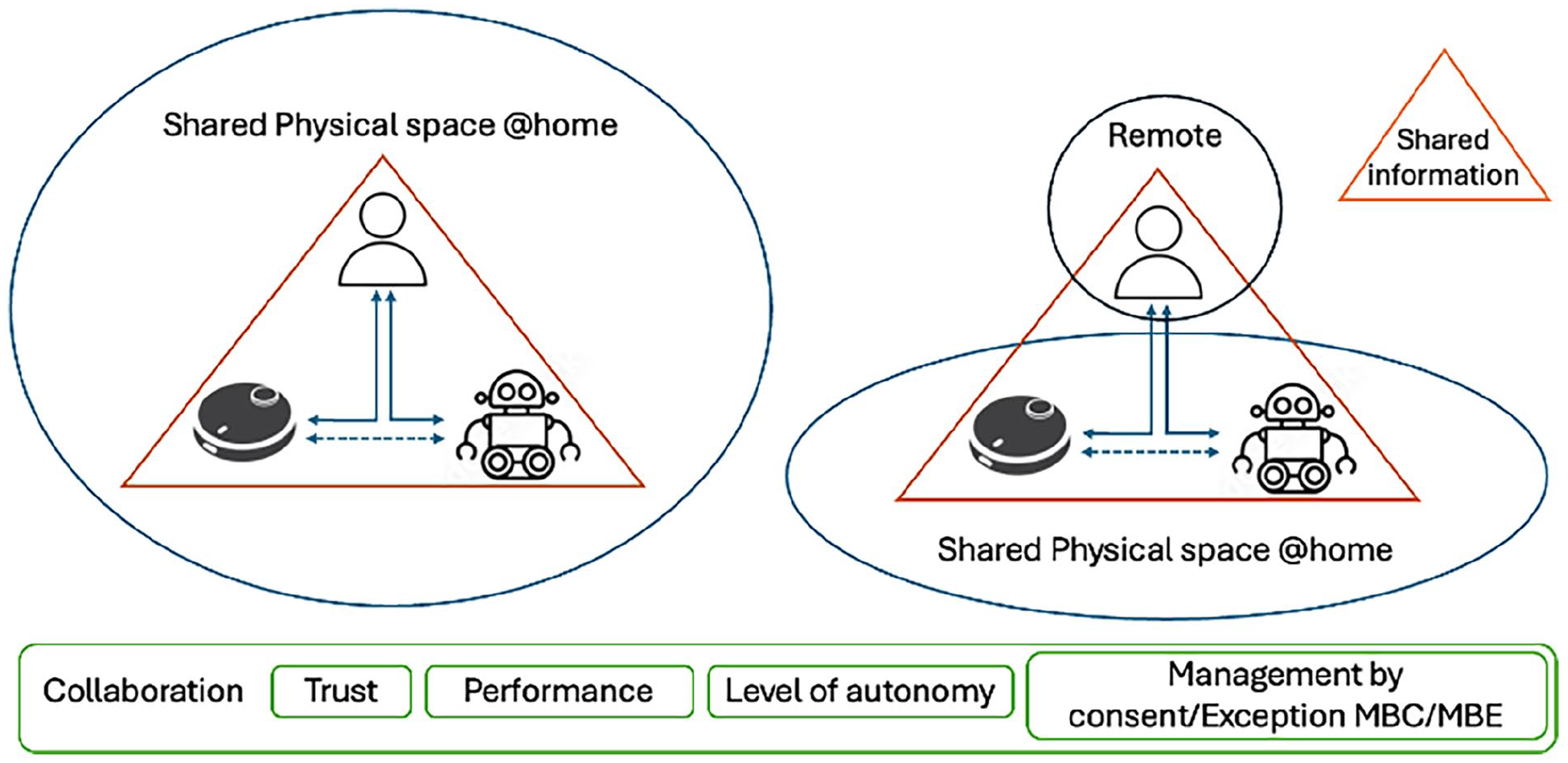
The exploration space of the current study describes the shared human-robot-robot interaction space.
We expect this exploration to raise awareness of the need for design concepts of multiple DSR environments and set the path for mapping the transfer of information options for future works.
Method
We developed and distributed an online questionnaire to collect preferences and stances regarding DSRs.
Participants
One hundred and forty-seven respondents (M = 33.2, SD = 9.9 years, 59.9% females, 55.7% bachelors, and 78% highly educated, all familiar with a cleaning DSR) were recruited for this exploratory study via social media and snowball techniques. The call was open during May–June 2023.
Online Questionnaire
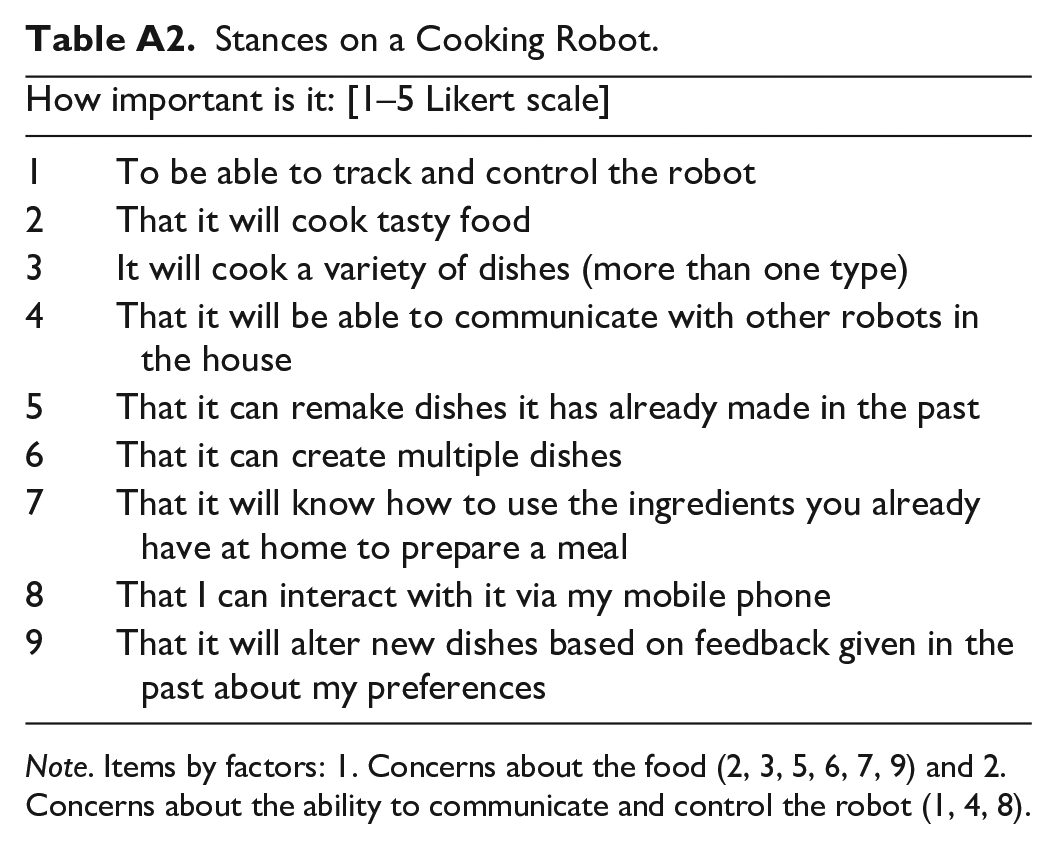
The questionnaire began with specifying the goals of the study and collecting preferences and stances regarding DSRs in general (13 Items) and a cooking robot in particular (9 items), as cooking robots are not commercially available products yet.
See Appendix A for the items (Tables A1 and A2).
Then, respondents were introduced to a use case where a cooking robot and a cleaning robot were working simultaneously to complete their tasks in an open space kitchen and living room area and were asked to rank their trust in each robot on a single-item scale [1–5], as recommended for global assessment, overall feelings, or impressions (Fuchs & Diamantopoulos, 2009).
Following, respondents were randomly assigned to one of four possible use cases that conveyed similar situations to the initial use case with a change, as one of the robots malfunctioned. The four possible use cases varied in where the user was (at home/not at home) and which robot malfunctioned (the cleaning robot/the cooking robot).
Participants were asked about their preferences for how the malfunctioning robot should act out of four possible levels of control: (a) Halt, do nothing; (b) Update the user and ask the user what to do; (c) Update the user, then ask the other robot for assistance; or (d) Ask the other robot for assistance. Then, they were asked to rank their perceived trust in each robot. The questionnaire ended with the collection of demographic information and debriefing.
Results
Findings regarding stances, trust, and preferences regarding the level of autonomy are presented.
Stances Regarding DSRs
We conducted two-factor analyses to examine what users are concerned with in DSRs in general and for a novel Cooking DSR. Utilizing varimax rotation techniques and scree plot, the 13 items on general stances towards robots led to three factors related to users’ expectations from a DSR: (1) Ease of use, (2) Attitude—The ability of the robot to perform its task, and (3) The effort invested in teaching the robot its tasks. The total cumulative explained variability was 48.5 % (18.3, 15.9, and 14.3 percent respectively for the three factors).
Since the cooking robot is a new concept that participants are not familiar with, nine items were dedicated to stances regarding it. The factor analysis of the cooking robot items yielded two factors: (1) Concerns about the food and (2) Concerns about the ability to communicate and control the robot. The total cumulative explained variability was 54.0 % (37.1 and 16.9, respectively, for the two factors).
Trust
The initial trust in the cleaning robot (M = 4.2, SD = 0.8) was significantly higher than for the cooking robot (M = 3.7, SD = 1.1), t(146) = 5.88, p = 2.63 × 10−08. A change in trust following the malfunction use case was found for the cleaning robot, where the malfunction reduced trust only slightly (M = 4.09, SD = 0.9) and insignificantly (p < .07). A malfunction did not affect the trust level for the cooking robot.
When participants opted that the other robot can attend to the malfunction (level (d) Ask the other robot for assistance), trust in the cleaning robot was (M = 4.0, SD = 1.0) and (M = 3.7, SD = 1.1) for the cooking robot, respectively. Hence, no significant differences in trust were found for respondents who chose this level relative to the other levels.
Perceptions Regarding the Required Level of Autonomy by Scenario
Recall that there were four possible scenarios varying by which robot malfunctioned (cooking or cleaning) and whether the user was at home or remote. Respondents were asked to choose from 4 levels of automation (do nothing, ask user, update user, then ask the other robot, or ask the other robot).
Figure 2 presents the distribution of user preferences for the level of autonomy in each scenario. The level of autonomy is presented in four levels. Across all four scenarios, respondents were most receptive (84%) to the middle levels of asking the user what to do or updating the user before asking the other robot for assistance.
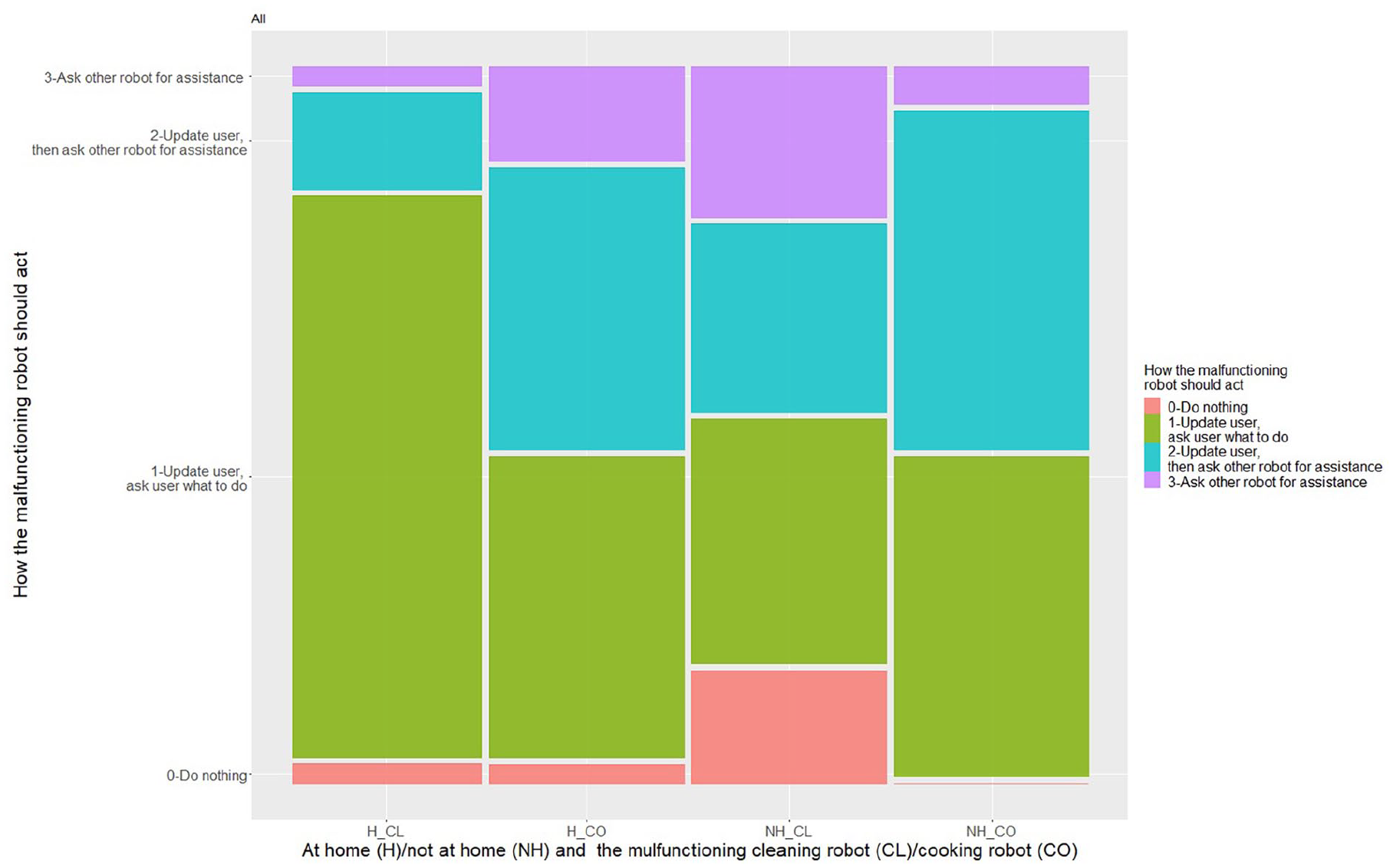
Perceptions regarding the DSRs’ level of autonomy per user location (remote or at home) and which robot is the malfunctioning robot (cooking/cleaning).
Chi-Square tests (χ2(9) = 34.69, p = 6.76 × 10−05) revealed that preferences differed between the cooking and the cleaning robot and whether the user was at home or not. For the cooking robot, user supervision was always the most preferred level of automation (89%). For the cleaning robot, participants were more willing to opt for level (d) of asking for the other robot’s assistance when not at home (see columns 1 and 3 in Figure 2, 3% vs. 22%) were willing to ask for help from the other robot without their intervention.
Discussion
In this exploratory study, we looked at people’s stances towards domestic service robots in general and specifically towards a new cooking robot. Participants’ responses reflect concerns about usability, attitude, and effort. These stances align with the old debate of whether the diffusion of domestic appliance systems into the home reduces the time and effort spent on housework (Bittman et al., 2004). Concerns of competency and control were further emphasized for the unfamiliar cooking robot. Indeed, perceived trust in the robot corresponds with familiarity and understanding of each robot’s competencies and reliability (see Miller et al., 2021).
Regarding DSR environments, respondents were reluctant to allow the robots to interact without their intervention or consent. For a cleaning robot, users are more willing to accept it, asking for assistance from another robot without their intervention when they are not at home. Something they are not willing to allow for a robot they do not fully trust or understand its competencies. These barriers to adopting multiple connected robots in the home reflect the issues raised in Table 1 and impact users’ trust and willingness to adopt connected DSRs. Ulfert et al. (2024) differentiate between three entities towards which trust can develop: (1) the individual robot, (2) the dyadic relationships (e.g., User-Cooking robot, User-Cleaning robot, and Cleaning robot and Cooking robot), and (3) the team. What we see from the reported trust values and Figure 2 is that respondents tend to consider all three entity levels; clearly, they had opinions about each individual robot, about their dyadic relationship with each robot separately, and as noted by the difference in preferences concerning being at home or remote, towards the triadic team.
A major limitation of this study is that it was conducted online on a convenience sample of people who own a cleaning robot. Further, we did not manipulate robot behavior or assess how understandability can change trust.
User needs and concerns need to be mapped and addressed in future studies, including studying interactions with real robots.
Footnotes
Appendix A
Stances on a Cooking Robot.
| How important is it: [1–5 Likert scale] | |
|---|---|
| 1 | To be able to track and control the robot |
| 2 | That it will cook tasty food |
| 3 | It will cook a variety of dishes (more than one type) |
| 4 | That it will be able to communicate with other robots in the house |
| 5 | That it can remake dishes it has already made in the past |
| 6 | That it can create multiple dishes |
| 7 | That it will know how to use the ingredients you already have at home to prepare a meal |
| 8 | That I can interact with it via my mobile phone |
| 9 | That it will alter new dishes based on feedback given in the past about my preferences |
Note. Items by factors: 1. Concerns about the food (2, 3, 5, 6, 7, 9) and 2. Concerns about the ability to communicate and control the robot (1, 4, 8).
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The Ben-Gurion University of the Negev supported this research through the Helmsley Charitable Trust, the Agricultural, Biological, and Cognitive Robotics Initiative, and the George Shrut Chair in Human Performance Management