
Abstract
As low speed automated vehicles (LSAVs) are further introduced into our driving fleet, driver-LSAV interactions may put pedestrians and other vulnerable road users at risk, as drivers could be confused by LSAVs and respond inappropriately when a pedestrian is present. A total of 242 participants with a driver’s license participated in an online survey to assess the ambiguity of the external human-machine interface (eHMI) or signaling system used by a recently deployed LSAV. Participants were shown signaling conditions presented as animated GIFs and were told to imagine they were following the LSAV as it stopped and turned on the signal. Participants were more likely to indicate that they would overtake the MCM when presented with the flashing hazards eHMI while the MCM was turning right compared to the alternative signal conditions. Correct shuttle behavior interpretation was found to be an important influence in participants’ choice in overtaking or waiting behaviors.
Objectives
As low speed automated vehicles (LSAVs) are further introduced into our driving fleet, it becomes important to understand how they can affect the traffic around them. LSAVs in mixed traffic must be designed with not only the legal rules of the road in mind, but also adhere to other road users’ expectations of vehicle behaviors. LSAVs may confuse other drivers who cannot predict its behavior, resulting in potentially dangerous situations. This can be demonstrated in a case study of a crash between an autonomous shuttle and a truck tractor at Las Vegas in 2017. While attempting to back into an alley, the truck hit the shuttle. The NTSB attributed the cause of the crash to the truck driver expecting the shuttle to stop far enough away that the truck would have enough room to back into the alley, compounded with the inability of the shuttle operator to manually take control of the shuttle (National Transportation Safety Board [NTSB], 2019). A major risk of LSAVs is drivers not successfully predicting automated vehicle behavior due to the LSAV not utilizing behaviors expected of human drivers. Such driver-LSAV interactions may put pedestrians and other vulnerable road users at risk, as drivers could respond to confusing LSAVs in dangerous manner when a pedestrian is present. An example is multiple threat passing, when a driver may become frustrated and decide to pass an ambiguously stopped LSAV that is actually yielding to a pedestrian.
This study examines a public demonstration of a LSAV known as the Med City Mover (MCM) shuttle, that drove a 16-block loop around downtown Rochester, MN, USA from August 2022 to August 2023. This location has significant pedestrian volume due to the proximity of the Mayo Clinic. On-board supervisors reported day-to-day traffic surrounding the MCM was more erratic and aggressive compared to typical traffic. The goal of this work was to assess the effectiveness of the external human-machine interface (eHMI) or signaling system used by the MCM. These eHMIs are intended to compensate for the differing travel patterns and lack of behavioral cues that drivers typically use to communicate with each other, by directly communicating LSAV behavior with signals. The MCM relied on its turn signal and hazard lights to communicate with drivers behind it, alongside two small flickering white LED rectangular displays. These lights were all activated when the MCM yielded to a pedestrian. The research team hypothesized that the aggressive traffic observed around the MCM could be partially due to the current eHMI and could be mitigated to some degree via signaling modifications. The research team conducted a survey on Prolific, an online survey platform, to test this hypothesis. The team anticipated poor understanding of the hazard lighting configuration and a significant association between this configuration with higher shuttle overtaking rates. Tested signals included the flashing hazards that activated when yielding to pedestrians, along with three alternative signals.
Approach
A total of 242 participants were recruited via prolific.com who were active residents within the United States and indicated having a driver’s license. Recruitment was split across two periods with 122 and 120 participants respectively. Each population had similar demographics and responses, so the data from both groups was combined.
Participants were shown one of four signaling conditions presented as animated GIFs. The four signaling conditions included: flashing hazard lights, a turn signal only, a turn signal with an LED display in the rear window displaying two pedestrian crossing icons with the text “PED X-ING,” or a turn signal with a similar LED display with text “PEDESTRIAN CROSSING” (see Figure 1). Participants were told to imagine they were following the MCM, and as the MCM came to the intersection shown, the MCM stopped and turned on the presented signaling system. No pedestrian was visible, but the sightline of the secondary crosswalk was partly occluded by the MCM in such a way that a pedestrian could be present but not seen. Participants were asked to indicate what they thought the MCM was doing (e.g., emergency braking, loading/unloading), and what they would do if they were driving behind it (e.g., go around, wait a few seconds then go around, wait behind the MCM until it moves). These questions were presented as single selection questions. The initial click after the start of the presentation was also examined as an index of response hesitancy and confusion, given consistent text length across scenario descriptions.
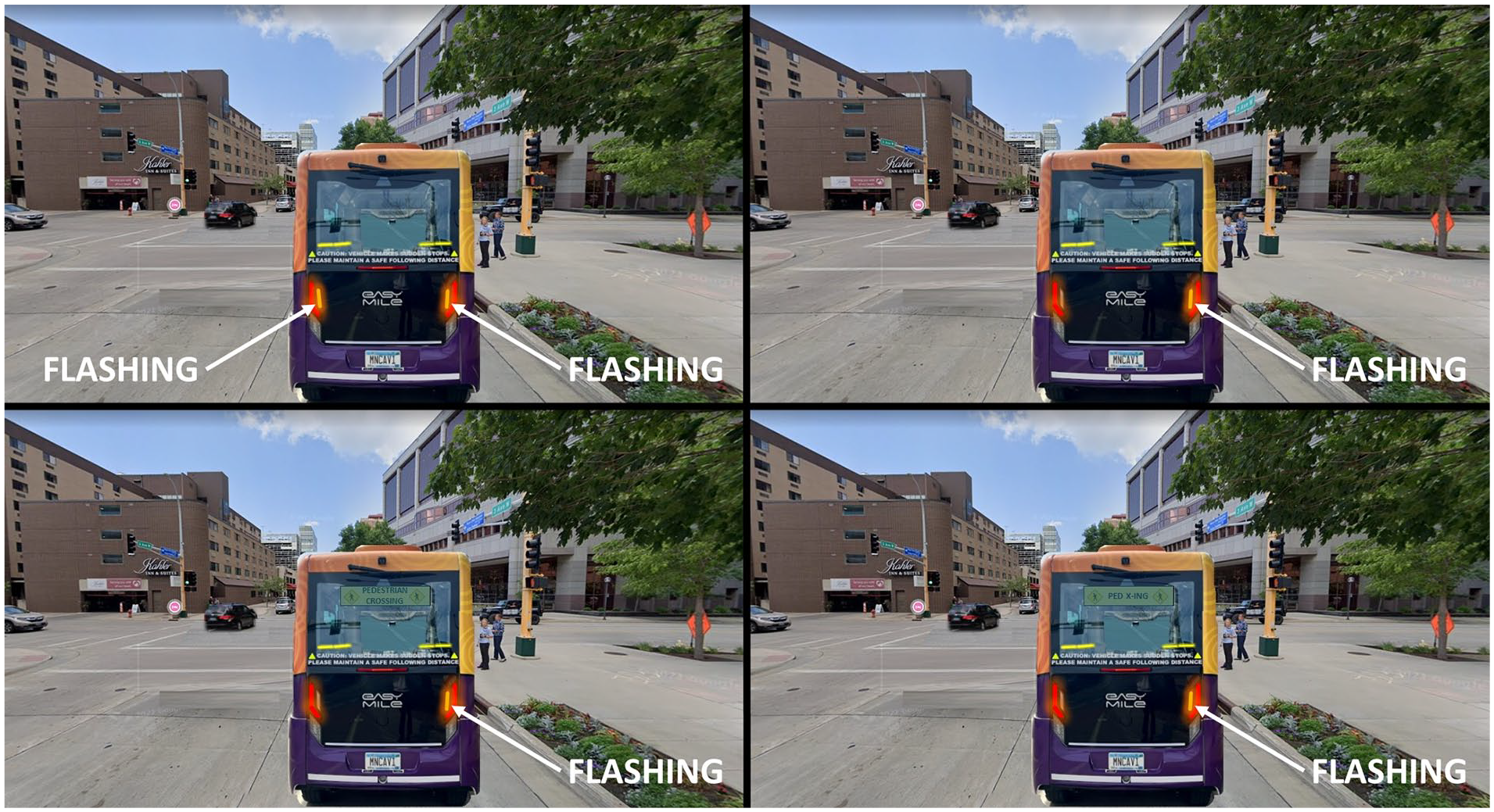
MCM signaling conditions presented as animated GIFs. Flashing hazards top left, turn signal only top right, PEDESTRIAN CROSSING bottom left, and PED X-ING bottom right.
Findings
A one-way ANOVA was used to analyze the effect of signaling methodology on overtaking (i.e., go around). A significant main effect was found for signaling methodology on overtaking likelihood [F(3,238) = 5.365, p = .001]. Post-hoc Tukey’s HSD found that participants were significantly more likely to overtake the MCM during the flashing hazard condition compared to the turn signal condition (p = .001, 95% CI [0.08, 0.47]) and PEDESTRIAN CROSSING condition (p = .011, 95% CI [0.04, 0.43]), and marginally more likely compared to the PED X-ING condition (p = .064, 95% CI [−0.01, 0.38]).
To determine how signaling interpretation may correlate with overtaking, the decision to overtake was analyzed compared to MCM signal interpretation. It was found that perceiving the MCM as yielding/stopping for a pedestrian (p < .001, 95% CI [0.0288, 0.1770]) and turning (p < .001, 95% CI [0.0607, 0.2334]) were significantly associated with lower likelihood to overtake.
The assessment of the scenario response time found a significant main effect of signaling methodology on time [F(3,235) = 3.783, p = .011]. Post-hoc Tukey’s HSD found the mean response time for the flashing hazard condition was significantly longer compared to both the PED X-ING condition (p = .016, 95% CI [0.692, 9.564]) and the PEDESTRIAN CROSSING condition (p = .048, 95% CI [0.031, 8.825]), and marginally longer than the turn signal condition (p = .061, 95% CI [−0.1351, 8.585]).
Takeaways
When yielding to a pedestrian during a right turn at signalized intersections, the signaling system used by the MCM in Rochester activated the shuttle’s hazard lights and flickering white LEDs. This study found that participants were more likely to indicate that they would overtake the MCM when presented with the flashing hazards eHMI while the MCM was turning right compared to the alternative signal conditions. Correct shuttle behavior interpretation was found to be an important influence in participants’ choice in overtaking or waiting behaviors. Participants who interpreted the shuttle as either turning or yielding to a pedestrian were found to be more likely to wait behind the shuttle compared to other scenario interpretations (e.g., malfunctioning, loading/unloading, or parking). Lastly, the flashing hazard condition was shown to have longer response times between presentation and participant first response, potentially due to the ambiguity of the flashing hazard signal.
These findings indicate the need for clear and understandable eHMI for vehicles on the road, particularly in regard to LSAVs which may behave differently relative to human driver expectancies. Poor communication of LSAVs’ intended behavior may result in aggressive or risky responses by drivers, such as overtaking, which not only puts drivers and passengers at risk but also vulnerable road users such as nearby pedestrians or cyclists. The optimal eHMI format and content for LSAV behavior requires further research, potentially generalizing other studies testing eHMI for communication between automated vehicles and pedestrians.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project was funded by the Minnesota Department of Transportation, contract number 1036342 WO43.