
Abstract
With the advance of human-robot collaboration (HRC), collaborative robots (cobots) have emerged as solutions to alleviate the manual tasks involved in electronic waste (e-waste) disassembly. This study employed surface electromyography (EMG) to investigate whether cobots can enhance muscle coordination. EMG-EMG coherence in both beta and gamma bands was calculated from 22 participants to quantify coordination between four muscle groups—biceps brachii (BB), brachioradialis (BR), upper trapezius (UT), and erector spinae (ES). Comparison results showed that after the introduction of the cobot, significant increases in left BR&BB, BR&UT, BR&ES, and BB&UT pairs, right BR&BB, BR&UT, and BB&ES pairs, and bilateral BR pair were observed. Notably, left BR&ES presented the most substantial increase at 18.88% and 26.39% in the beta and gamma bands, respectively (p < .05). These findings suggest that cobots hold potential to enhance muscle coordination during e-waste disassembly, thereby shedding light on the construction of HRC-based e-waste disassembly systems.
Introduction
Electronic waste (e-waste) is among the fastest-growing waste streams around the world (López et al., 2022). In 2019, globally, a remarkable 53.6 million metric tons of e-waste were generated (Forti et al., 2020). This trend may be attributed to the rapid updates and increasing demand for electronic products. However, the management of this e-waste is often informal and lacks eco-friendly practices. While techniques such as sintering, furnace smelting, and incineration have been utilized in the e-waste recycling process, they are frequently linked to severe adverse effects on human health, such as cardiovascular, digestive, and respiratory illnesses (Lin et al., 2022). To fully utilize e-waste, disassembly is commonly performed to recycle its useful components, thereby reducing the volume of e-waste and alleviating the adverse effects during e-waste management (Ádám et al., 2021). Traditional e-waste disassembly is typically carried out by human workers, it usually increases operational costs due to its labor-intensive nature (Daneshmand et al., 2023). With the advent of Industry 4.0, there is a transformative shift from traditional manual working modes to human-robot collaboration (HRC) working modes. Collaborative robots (cobots) have emerged as robotic solutions to address the traditional labor-intensive e-waste disassembly (Alvarez-de-los-Mozos & Renteria, 2017; Daneshmand et al., 2023).
Recent research related to the cobots-assisted e-waste disassembly mainly concentrates on task allocation and planning (Liao, Chen, Hu, and Behdad, 2023; Liao, Chen, Hu, Liang, and Behdad, 2023), along with enhancing collaboration safety and efficiency through AI-based methods (Brogan et al., 2021; Liao, Chen, Hu, and Behdad, 2023; Liao, Chen, Hu, Liang, and Behdad, 2023). To alleviate workers’ fatigue, discomfort, and stress, and to facilitate seamless HRC, evaluating the ergonomics in the cobots-assisted e-waste disassembly is crucial. Our previous studies have assessed changes in perceived workload and kinematics parameters following the introduction of cobots in e-waste disassembly, results demonstrated a significant decrease in NASA-TLX scores and L5/S1 angle with the assistance of cobots (Chen et al., 2022). Since disassembly tasks involve the activation of multiple muscles to drive human workers through the process, assessing muscle coordination can also serve as a metric for ergonomics evaluation. To this end, this study utilized the surface electromyography (EMG) signals, which reflect the muscle contraction intensity (Li et al., 2022), to conduct the EMG-EMG coherence analysis between muscles engaged in the disassembly. EMG-EMG coherence quantifies the synchronization or co-activation between the electrical activities of different two muscles. Higher coherence reflects a more robust neuromuscular drive and coordination between two muscles (Nojima et al., 2018; van Asseldonk et al., 2014). In the context of e-waste disassembly, EMG-EMG coherence serves to evaluate the physical ergonomics and musculoskeletal loading, thereby providing the intuitive evidence of how cobots improve traditional manual disassembly.
Current EMG-EMG coherence analysis research focus primary on assessing neuromuscular control approaches and motor coordination. For instance, Nojima et al. (2020) observed that EMG–EMG coherence between medial and lateral gastrocnemius muscles presented significant higher levels during the unipedal stance task compared to the bipedal stance. van Asseldonk et al. (2014) investigated intramuscular EMG-EMG coherence in the tibialis anterior muscle when participant walking with different speeds. Keenan et al. (2012) researched in the common oscillatory drive to hand muscles in young and older adults by assessing the sensitivity of EMG-EMG coherence.
The aforementioned studies on coherence analysis provide a solid foundation for evaluating muscle coordination in different tasks using EMG-EMG coherence. Therefore, this study aims to assess the ergonomics of traditional versus cobot-assisted e-waste disassembly using coherence analysis, thereby offering a more comprehensive understanding of how cobots reshape the working modes of human workers from the perspective of neuromuscular control. We hypothesized that cobots have the potential to enhance the coordination between muscles during e-waste disassembly tasks.
Methods
Participants
Twenty-two participants were recruited for e-waste disassembly, with mean (standard deviation) age, height, and body weight reported as 25.4 (4.3) years, 174.6 (10.3) cm, and 65.4 (20.0) kg, respectively. Among the participants, 20 were right-handed, while one identified as left-handed, and another as ambidextrous. Inclusion criteria required: (1) confirmation of overall health, (2) normal or corrected-to-normal vision with contact lenses, and (3) absence of musculoskeletal injuries requiring medical treatment in the past 12 months. The experimental protocol received approval from the University of Florida Institutional Review Board (UF IRB202200211).
Apparatus
For e-waste disassembly representation, this study chose a personal desktop, namely, a Dell Optiplex 9020 (Dell Inc., Round Rock, USA), thanks to its widespread usage and significant contribution to the overall e-waste volume (Robinson, 2009). After assessing the value and potential for reuse or recycling of the desktop’s components, five were selected for disassembly, according to a predetermined disassembly sequence: (1) an optical disk drive, (2) a hard drive, (3) a fan shroud, (4) a heat sink, and (5) a RAM (Figure 1a). This sequence was derived from the analysis of physical and design constraints using an optimization algorithm developed by the research team (Chen et al., 2022; Liao, Chen, Hu, and Behdad, 2023; Liao, Chen, Hu, Liang, and Behdad, 2023).
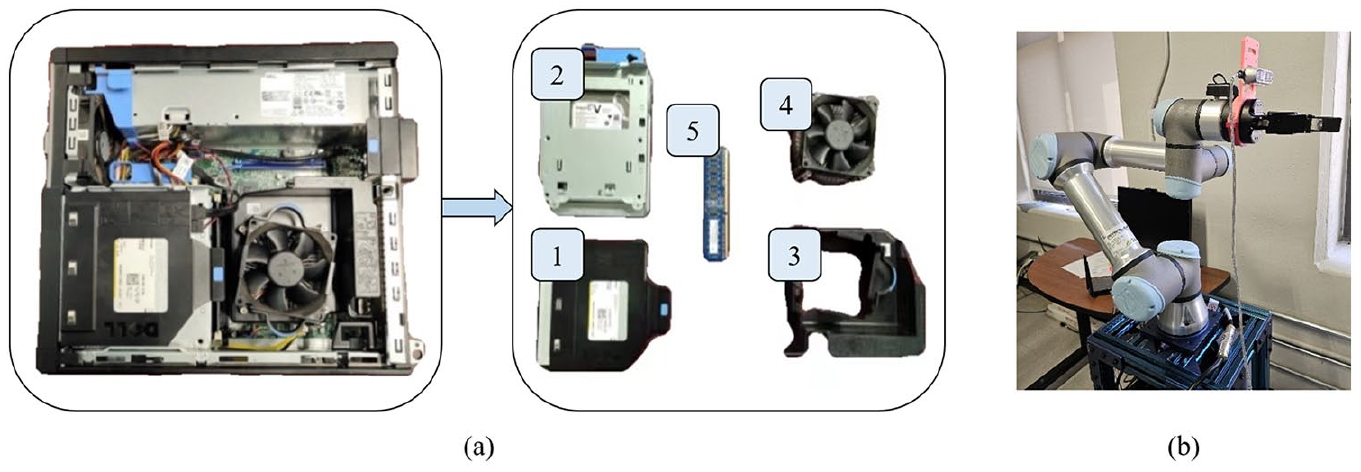
Apparatus. (a) Dell Optiplex 9020 desktop and its five components designated for disassembly. (b) Cobot assistant equipped with an integrated 2-finger adaptive gripper.
This study employed a UR5 robot (Universal Robots, Odense, Denmark) weighing 18.4 kg and featuring six degrees of freedom as the cobot assistant (Figure 1b). The cobot was equipped with a Robotiq 85 gripper as the end effector (Robotiq, Levis, Canada) (Figure 1b). Delsys Trigno EMG system (Delsys Inc., Boston, MA) was utilized for EMG signal acquisition, the sample rate is 1,260 Hz.
Experimental Settings
This study calculated the EMG-EMG coherence for comparisons between “no robot” (manual) and “with robot” (cobot-assisted) working mode for disassembly. The independent variable were the two working modes, that is, “no robot” and “with robot.” While the dependent variable was the mean value of the EMG-EMG coherence under the two working modes.
To quantify the coherence between two muscles, an EMG signal acquisition experiment was conducted. Specifically, eight muscles from the back and upper limbs and were selected, namely bilaterial biceps brachii (BB), brachioradialis (BR), upper trapezius (UT), and erector spinae (ES). The placement of the Trigno EMG Sensors was shown in Figure 2. The maximum voluntary contraction (MVC) of each muscle was measured according to the guideline (Brown & Avers, 2013).
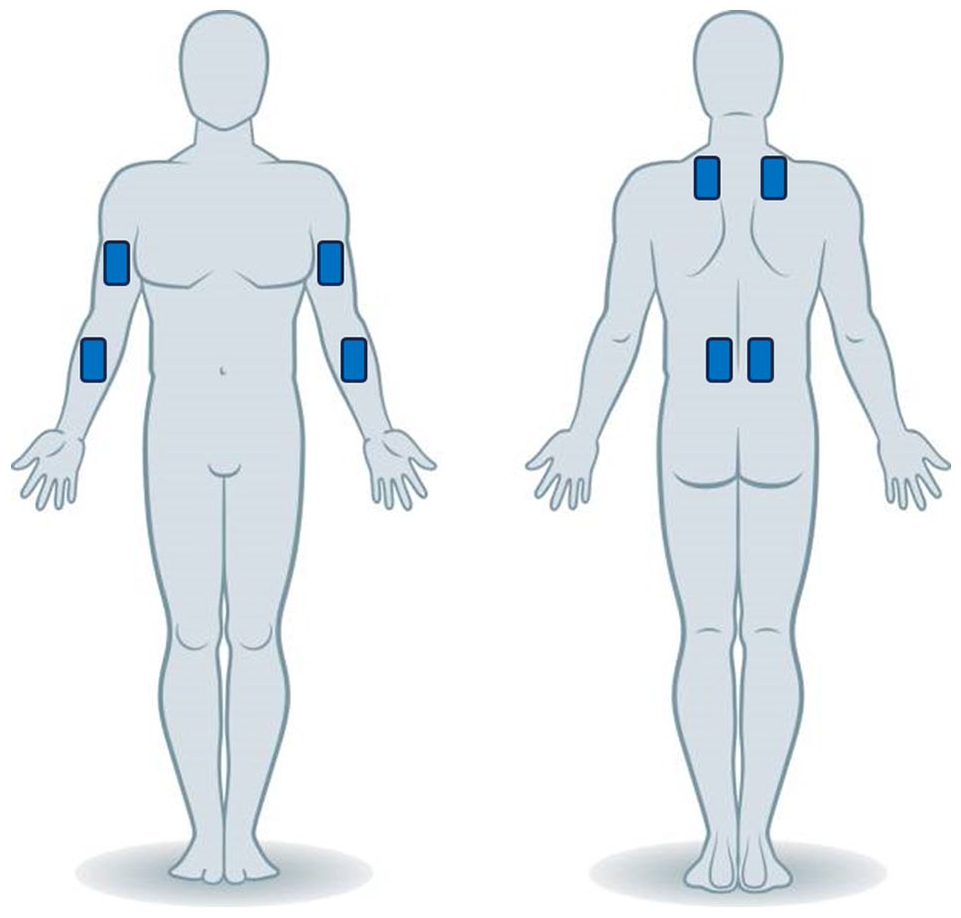
Placement locations for EMG sensors.
Protocol
When participants arrived, the first procedure was to review and consent to the informed consent form. Subsequently, participants were required to report their demographic details, including their age, gender, weight, and height. Following this, the experimenter demonstrated the disassembly task to the participants. Participants then underwent a minimum of two practice trials for each working mode to become familiar with these procedures. Next, EMG sensors were attached to the participants, and the MVC for each muscle was measured. After the abovementioned procedures, participants completed four simulated disassembly trials, with two repetitions for each working mode (order counterbalanced).
EMG Signal Pre-Processing
EMG signal pre-processing was carried out at MATLAB R2018b. Initially, the DC offset was removed. Subsequently, a 60 Hz notch filter and a 15 to 450 Hz Butterworth band-pass filter, both with a fourth-order, were utilized to filter out the environmental interference and extract the effective frequency contents of the EMG signals. Following this, the full-wave rectification was performed, and a fourth-order Butterworth low-pass filter with a cutoff frequency of 6 Hz was applied to extract the EMG linear envelope. Finally, the maximum value of MVC was utilized to normalize the EMG signals.
EMG-EMG Coherence Calculation
This study employed the magnitude-squared coherence to quantify the muscle coordination during e-waste disassembly with and without the assistance of a cobot. Equation 1 shows the calculation of magnitude-squared coherence, where


In Equation 2,
Statistical Analysis
The EMG-EMG coherence analysis involved extracting coherence curves for each muscle pair in different working modes (“no robot” and “with robot”), followed by comparing the mean coherence values between the two modes. Therefore, paired-samples T-tests were conducted to analyze the results, with significant differences defined as p-values less than .05 (*), and less than .01 (**). The analysis was performed using IBM SSPS Statistics 23 (IBM Corp., Armonk, NY, USA).
Results
Coherence Between Ipsilateral Muscles
For coherence between muscles on the symmetrical side (Figure 3a and b), the BRL&UTL, BRL&ESL, BBL&UTL, BRR&BBR, and BRR&UTR pairs showed significant increases in both the beta and gamma bands, after the introduction of cobots in the e-waste disassembly. Additionally, the BRL&BBL and BBR&ESR pair presented a significant increase in beta band, while BBR&ESR showed a significant increase in gamma band.
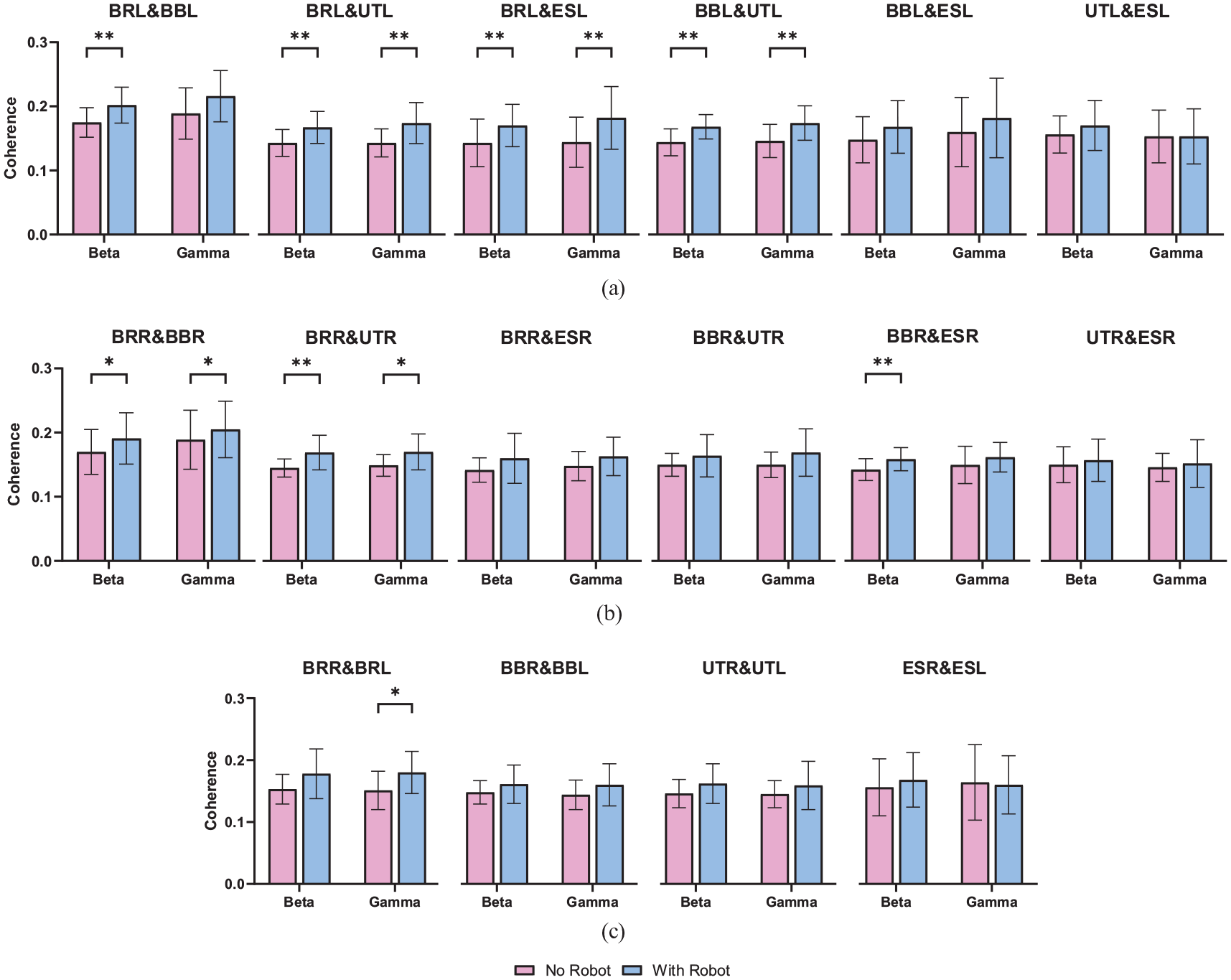
(a) Muscle pairs on the left side of the body, (b) the right side, and (c) the bilateral side.
Table 1 presents the percentage changes before and after cobots were applied. Notably, among the coherence in ipsilateral muscle pairs, the BRL&ESL pair presented the most significant increase at 18.88% in the beta band (p = .008, t = −2.980), and 26.39% in the gamma band (p = .002, t = −3.562). The BRL&UTL also showed a secondary increase at 16.78% in the beta band (p = .008, t = −2.937), and 21.68 in the gamma band (p = .010, t = −2.878).
Percentage Changes and t-Test Results of Each Pair.
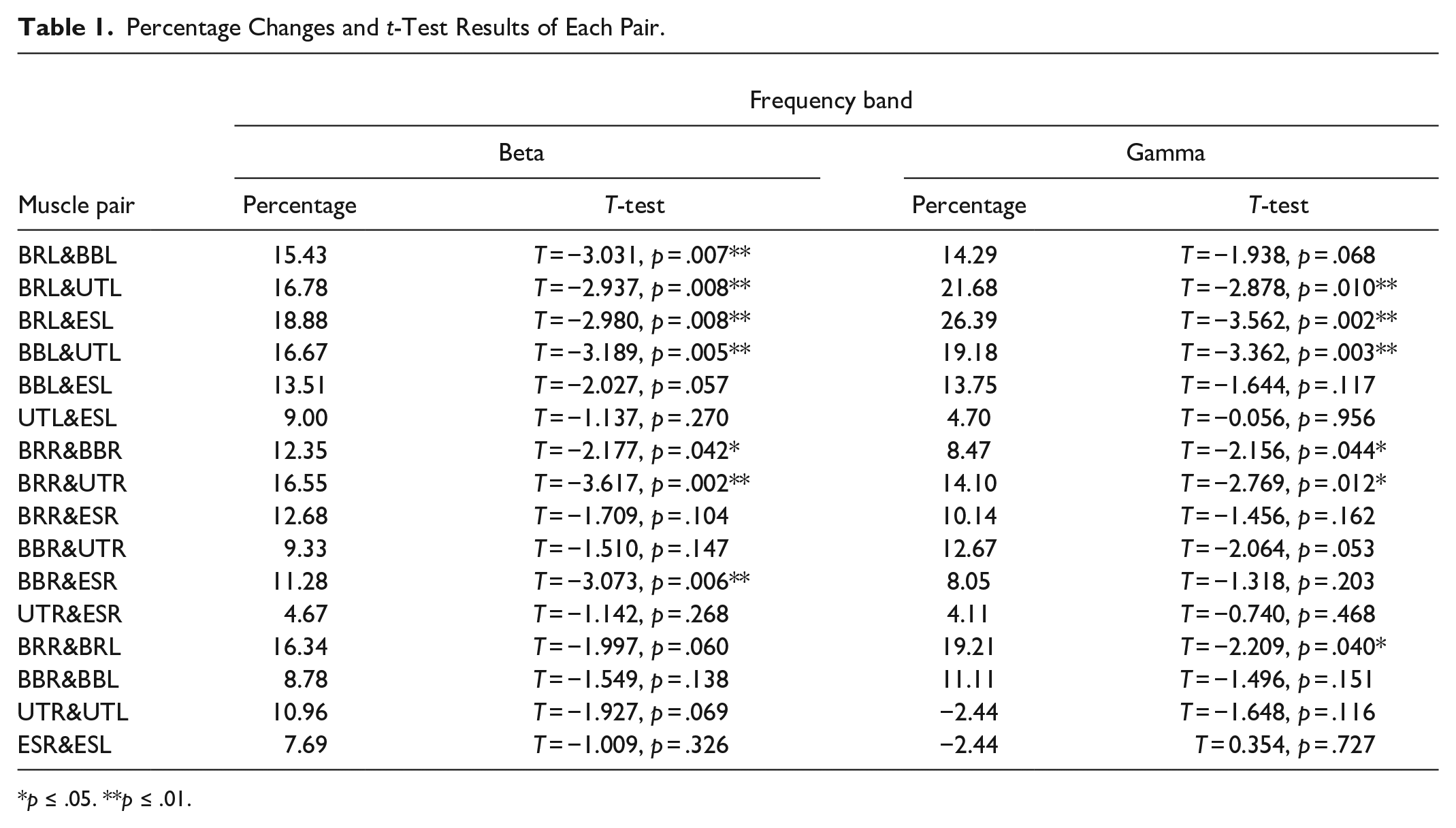
p ≤ .05. **p ≤ .01.
Coherence between bilateral muscles
Figure 3c illustrates the coherence changes between muscles on the bilateral sides. The results indicate that only the BRR&BRL pair presented a significant increase after the introduction of a cobot in the gamma band, with an increase of 19.21% (p = .040, t = −2.209) (Table 1). No significant changes were observed in other pairs before and after the application of cobots.
Discussion
The introduction of cobots in e-waste disassembly is reshaping the labor-intensive nature of traditional manual work. A previous study by the research team investigated perceived workload and ergonomics using NASA-TLX scores and joint angles during e-waste disassembly (Chen et al., 2022). This study contributes to a better understanding of human response changes pre- and post-cobot introduction, thus enhancing the development of HRC systems. Since disassembly tasks involve multiple muscles working together, muscle coordination is also a key factor in ergonomic evaluation. Therefore, this study employed EMG-EMG coherence for a more comprehensive assessment of ergonomics in cobot-assisted e-waste disassembly.
Previous EMG-EMG coherence studies primarily focused on investigating coherence between various muscle groups during specific tasks or activities, such as activities performed with different movement patterns, motor speeds, and by different groups of subjects (Keenan et al., 2012; Nojima et al., 2020; van Asseldonk et al., 2014). Although these studies primarily started from the perspective of neuromuscular control, they also shed light on ergonomics assessment. For instance, in the context of HRC during e-waste disassembly, human workers and robots alternately perform specific tasks. Tasks requiring finer control are typically assigned to human workers, while tasks requiring gross control are allocated to cobots. Therefore, decent neuromuscular control by human workers still remains crucial for the entire e-waste disassembly process. This suggests that previous studies related to the EMG-EMG coherence have laid a foundation for transferring the coherence analysis into ergonomics evaluation for cobot-assisted e-waste disassembly.
This study analyzed the coherence of 16 muscle pairs on both the ipsilateral and bilateral sides of the body. As shown in Figure 3, among the ipsilateral muscle pairs, 5 out of 12 showed significantly increased coherence in both beta and gamma bands after cobot assistance: the BRL&UTL, BRL&ESL, BBL&UTL, BRR&BBR, and BRR&UTR pairs. Additionally, significant increases were observed in the BRL&BBL and BBR&ESR pairs (beta band only). However, among the bilateral pairs, only the BRR&BRL pair exhibited a significant increase in the beta band. The disparity in significant coherence increases between the ipsilateral and bilateral muscle pairs may be attributed to the disassembly process itself. The tested muscles, situated in the upper limbs and back, experienced different sub-tasks initiated by the left and right hands. Furthermore, the stance position during e-waste disassembly may not symmetrical and static, as human workers dynamically adapted their standing positions. Consequently, muscle activity between the left and right sides of the body lacked consistency, which means the activation time points for muscles on each side were different. Therefore, ipsilateral muscles are more likely to present consistent activation, thereby enhancing muscle coordination in ipsilateral pairs.
In addition, as shown in Table 1, the coherence of almost all pairs presented an increasing trend in both the beta and gamma bands, except for the UTR&UTL and ESR&ESL pairs in the gamma band. This finding further demonstrated the potential of cobots to enhance muscle coordination during e-waste disassembly. What’s more, the overall increase may also be attributed to the alternating working mode between cobots and human workers, which synchronizes the contraction and resting time points of each muscle at the beginning and end of a task. Consequently, the co-activation time of different muscles was increased compared to the manual working mode, and the overall coordination was enhanced.
However, certain muscle pairs showed no significant increase, this may be influenced by specific disassembly tasks, the muscles tested, and the relative positions of humans and robots. Hence, future work will broaden this analysis to more muscles, other bio-signals, and diverse scenarios to explore additional possibilities for quantifying muscle coordination in ergonomics evaluation.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Future of Work at the Human Technology Frontier (FW-HTF) Program of the National Science Foundation under Grant Nos. 2026533 and 2026276. Any opinions, findings, conclusions, or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.