
Abstract
Although motion energy harvesting at the small scales has been a research topic for over 20 years, the implementation of such generators remains limited in practice. One of the most important contributing factors here is the poor performance of these devices under low-frequency excitation. In this research, a new metric is proposed to evaluate the performance and bandwidth of generators at low frequencies. For that, a classification based on the dynamics was made. It was found that the highest efficiencies were found in single-degree-of-freedom resonators where a large motion amplification was achieved. Smaller generators can be designed by limiting the motion through end-stops at the cost of a reduced efficiency. Moreover, it was argued that upon miniaturization, resonators could be outperformed by generators using a frequency up-conversion principle.
1. Introduction
Motion energy harvesting with miniaturized devices has been studied for over 20 years since the early work of Williams and Yates (1996), in which the piezoelectric, electromagnetic, and electrostatic transduction mechanisms were investigated for the purpose of vibration-to-electric energy conversion. Devices that incorporate such transduction mechanisms are called motion energy harvesters and have received much interest as they may provide an alternative to batteries. Especially, for biomedical applications such as pacemakers, hearing aids, insulin pumps and various sensors, the elimination of a dependency on batteries can offer a huge quality of life improvement to patients. Despite the vast amount of research on the topic, the implementation of miniaturized motion energy harvesters remains limited in practice (Daqaq et al., 2014). One of the main contributing factors is that the performance of these systems is poor when excited by a low-frequency driving motion such as human motion (<10 Hz) (Green et al., 2013).
In prior art, a few design strategies were proposed to effectively harvest energy from these low-frequency motions. Bowers and Arnold (2009) argued that the commonly used resonant generators need to be very large to be effective at low frequencies. As an alternative, a 4 cm3 concept based on rolling magnets was proposed for which an average output power of 1.44 mW was shown when carried in a pocket during running. Galchev et al. (2012) developed a piezoelectric system based on the frequency up-conversion principle pioneered by Kulah and Nafaji (2008). The 3.75 cm3 prototype was able to generate an average power of 13.6 μW from a vibration of 10 Hz at 1 g. In the work of Geisler et al. (2017), non-linearities are introduced to constrain the internal motion and limit the size of generator. Excited by a 6 Hz vibration at 2 g, the 9 cm3 prototype showed an average power of 6.57 mW. It was estimated that only up to 36% of the theoretical power output was attainable as a result of the displacement constraints.
However, with the existing methods it is not possible to generalize the results from these studies and compare the performances of the used design strategies on an abstract level. Without such a proper comparison, it remains unclear what specific challenges need to be solved to achieve a high efficiency. The research objective of this work is to classify these generators by their dynamics and compare the efficiencies between the groups. For this purpose, a new metric will be proposed. First, the metric presents a modification to an existing efficiency metric that adds a sensitivity to generator shape and material. Second, a new parameter is introduced which is called the motion ratio and relates the excitation amplitude to the dimension of the generator in the direction of the driving motion.
In section “Methods,” the methods are explained and the new metrics are introduced. Section “Classification of generator dynamics” presents the classification, and section “Results” presents the results of the reported generators and identifies the respective groups. Section “Discussion” discusses the observations that can be made from the results, and the conclusions are presented in section “Conclusion.”
2. Methods
2.1. Performance evaluation
For the comparison of different devices or harvesting strategies, there are a number of performance metrics available. Excellent investigations and discussions of these metrics were presented by Mitcheson et al. (2008) and Liu et al. (2015a). The volume figure of merit
Although the
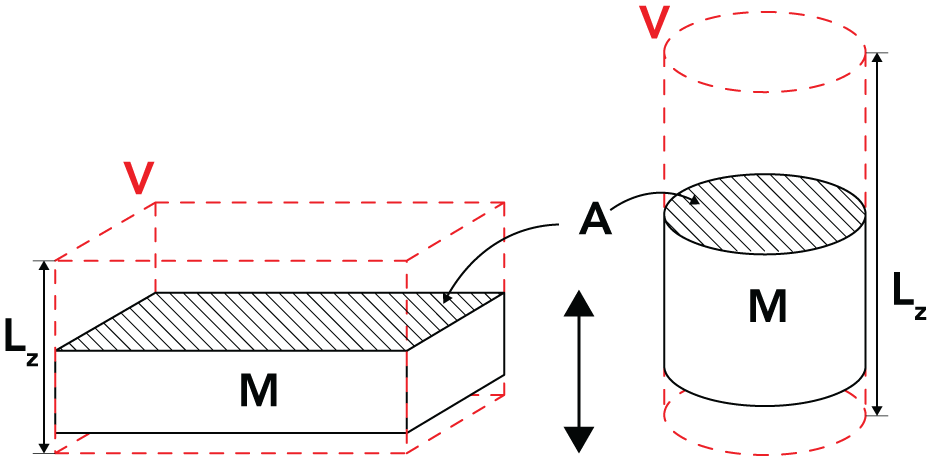
Two imaginary generators with an equal total volume, V, and mass, M. A greater power output can be expected from the cylindrical generator due to its larger dimension in the direction of the driving motion,
In order to make this comparison more fair, a variation in the

where
2.2. Peak efficiency and normalized half-efficiency bandwidth
In a great deal of the experimental work, the power output of a generator prototype is presented for a range of input conditions, typically through frequency sweep (with constant acceleration). From these data, a frequency-efficiency graph can be constructed by calculating equation (1) for every data point, as shown in Figure 2. For the assessment of the performance of the generators, two properties will be evaluated: the peak efficiency,
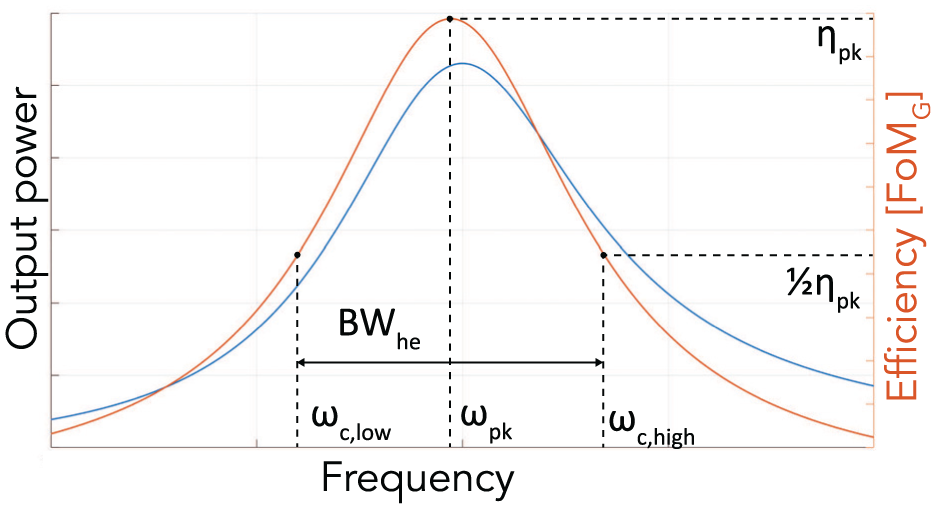
Example frequency-output power (blue) and frequency-efficiency graph (orange) of an energy harvester. The peak efficiency,
The peak efficiency
For this reason, a second property is derived from the frequency–efficiency graph. The normalized half-efficiency bandwidth

where
2.3. The motion ratio
The dynamics of the energy harvester are for a great deal determined by the

2.4. Literature search method
Relevant scientific literature on the topic of energy harvesting was searched in the database of Scopus. Only publications of experimental nature where both
3. Classification of generator dynamics
Based on the dynamics found in the reported energy harvesters, a classification is proposed where the generators are split in the following groups. The designs found in the literature are sketched and grouped in Figures 3 and 4 according to the classification. 1
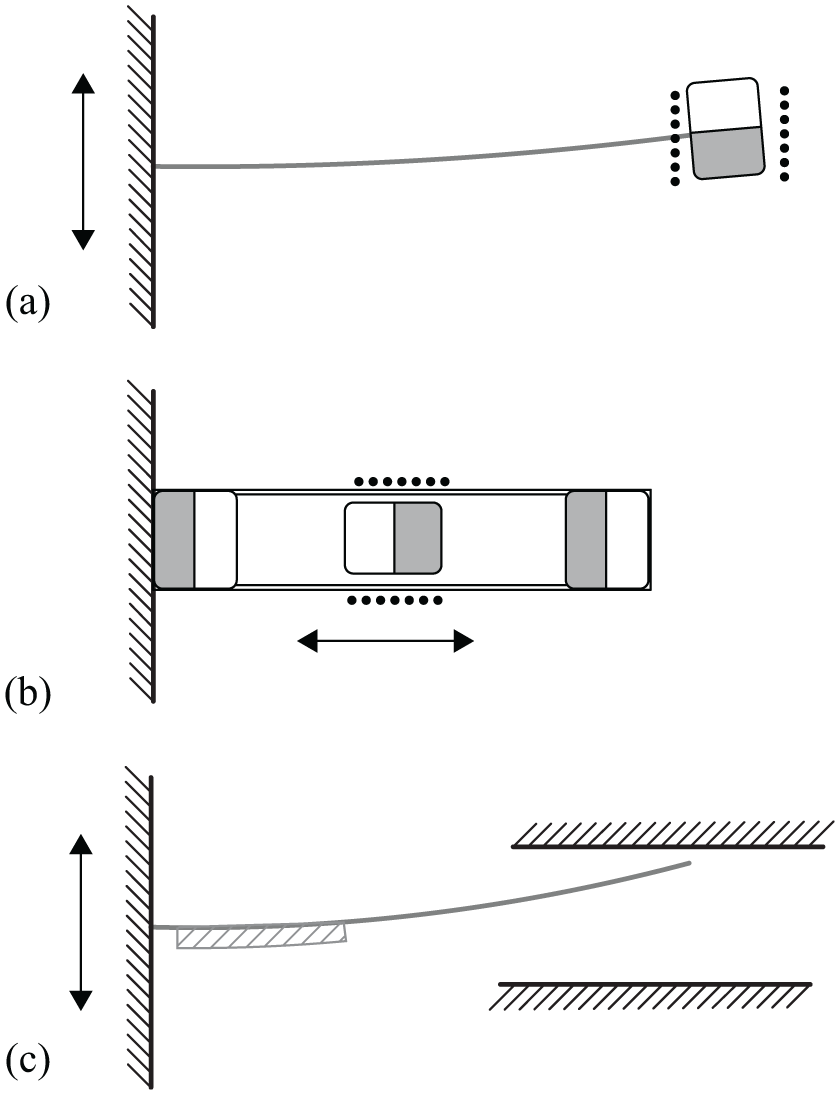
Sketches of single-degree-of-freedom energy harvesters: (a) without end-stops, (b) with magnets acting as soft-stops, and (c) with mechanical contacts acting as hard-stops.
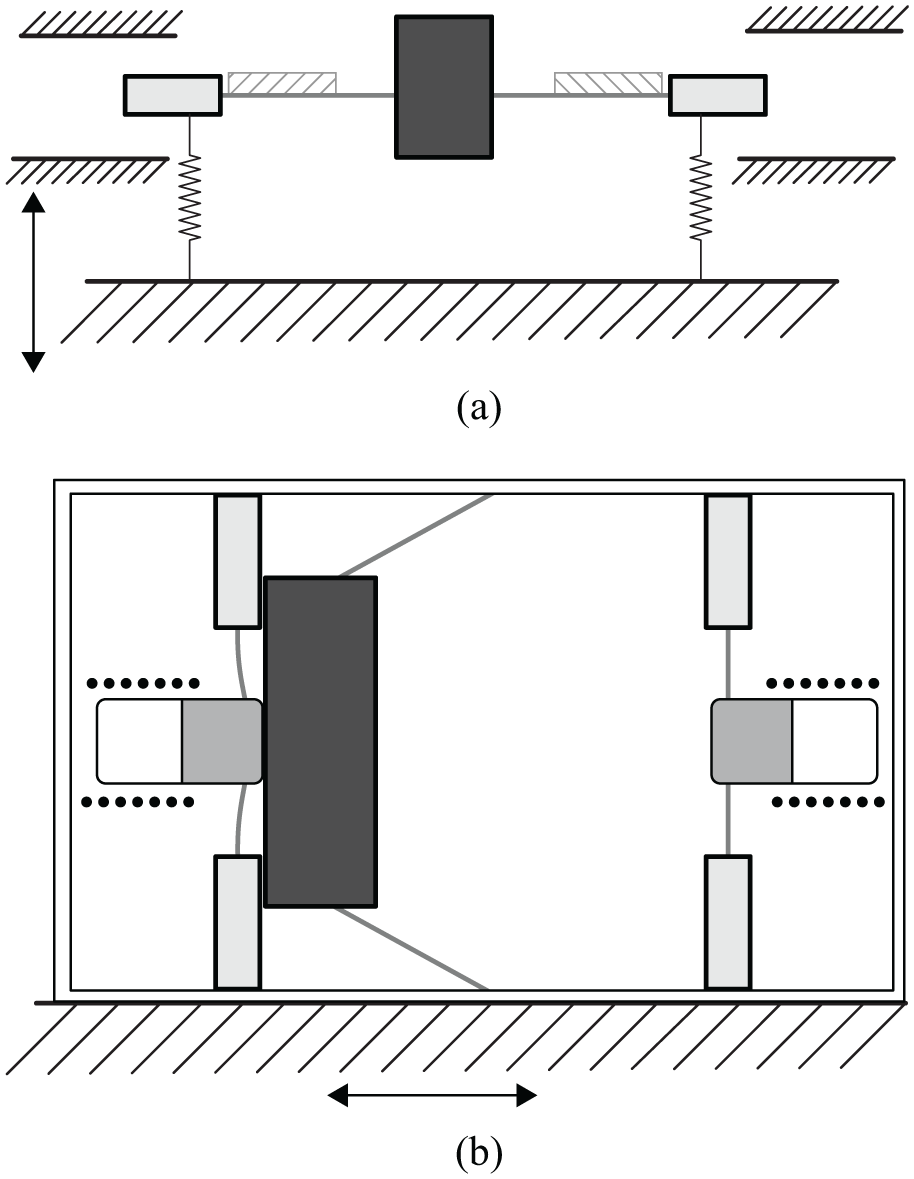
Sketches of frequency up-converting energy harvesters: (a) using impact and (b) using plucking.
3.1. Single-degree-of-freedom generators
This subsection groups all energy harvesters that have a single degree-of-freedom (SDoF), which is used directly for energy conversion.
3.1.1. Without end-stops
The first group that can be found among the reported devices are the SDoF that operate without end-stops. In Figure 3(a), the working principle of the generator reported by Beeby et al. (2007) is sketched. In this design, a magnet at the tip of a thin beam moves relative to a fixed coil, inducing a current. These generators can be modeled as a linear mass–spring–damper system with mass M, stiffness K, and damping coefficient C. The following equation of motion can be found

where z is the relative internal displacement and
3.1.2. With soft-stops
Next are the non-linear energy harvesters that rely on a gradually increasing stiffness to limit the internal motion. An example of such a system is the design reported by Geisler et al. (2017), which is sketched in Figure 3(b). In this design, a moving magnet experiences a repulsive force from the oppositely poled magnets at the ends. The dynamics of such a system can be modeled by the Duffing equation shown in equation (5) (Pellegrini et al., 2013)

where
3.1.3. With hard-stops
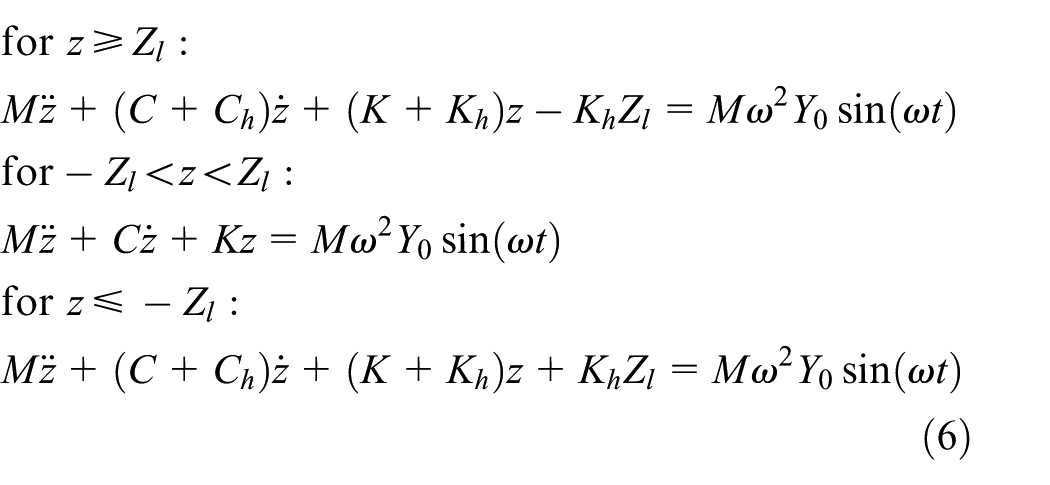
In the third group, there are the energy harvesters with a very rapid stiffening effect at the end of their range of motion. These stiffening effects are, for example, the result of a mechanical contact, as is the case in the design of Liu et al. (2012), which is sketched in Figure 3(c). In this design, the proof mass mounted on the tip of a piezoelectric beam makes contact with mechanical elements on the top and bottom during excitation. The dynamics of these systems can be modeled by the piecewise linear equation of motion given in equation (6), where
3.2. Frequency up-converters
In addition, there are systems that use an inertial mass to excite a secondary oscillator in its natural frequency, which is increased w.r.t the frequency of the driving motion. The relative motion of the secondary oscillator is then used for energy conversion.
3.2.1. Using impact
The first group of frequency up-converters (FupC) use the impact of an impact member to excite the secondary oscillators. An example of such a system is the generator reported by Dechant et al. (2017) and is shown in Figure 4(a). In this design, a piezoelectric membrane is mounted between a proof mass (dark) and an impact member (light). Under a driving motion, the impact member is displaced until it makes contact with the mechanical stops at the end of its range of motion. As a result, the proof mass experiences an impulse-like response and begins to oscillate in its own natural frequency. This system can be modeled as a two-DoF system with the following equations of motion

where Eq.6 is the relevant left side of equation (6),
3.2.2. Using plucking
The final group contains the FupC that excite their secondary oscillator through plucking. An example was reported by Galchev et al. (2011) and is sketched in Figure 4(b). The design consists of an inertial mass which snaps back and forth between the two secondary oscillators, attaching magnetically. When the inertial mass detaches, the secondary oscillator starts oscillating at its natural frequency and generates power through electromagnetic induction. The dynamics in such a system can be modeled as three oscillators with the following equations of motion
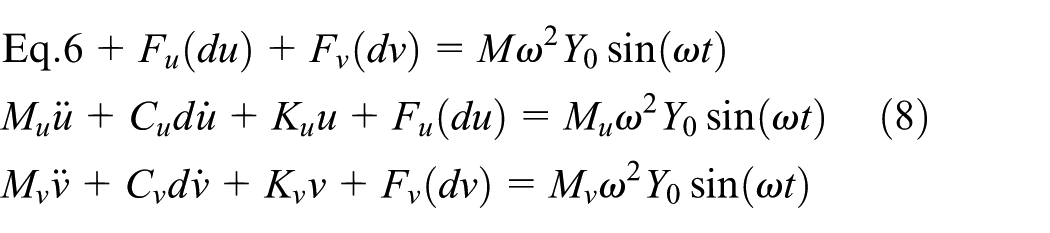
where u and v and du and dv are the positions of the secondary oscillators w.r.t. the housing and w.r.t. the inertial mass, respectively.
4. Results
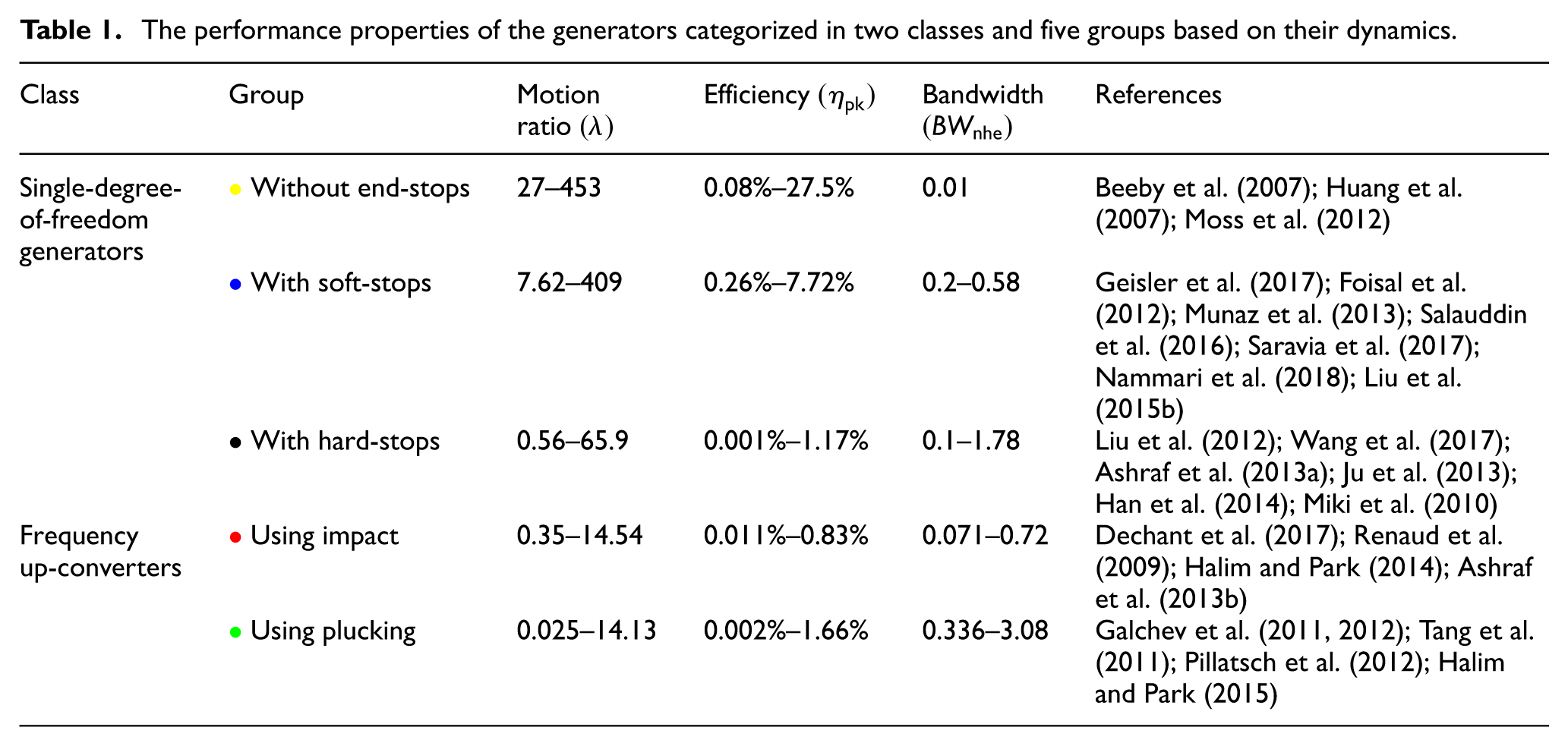
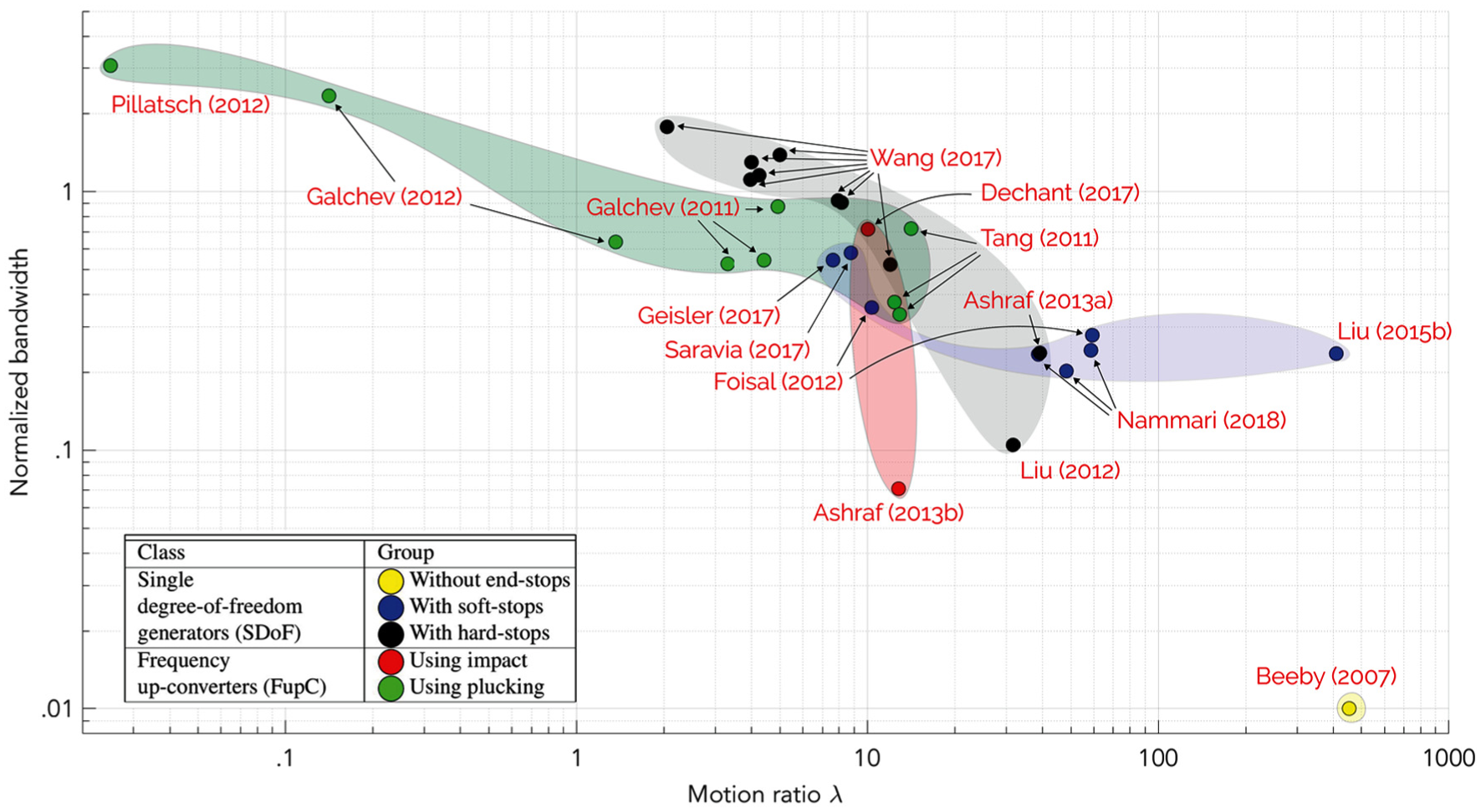
Table 1 presents the classification of the reported generators and the calculated values for
The performance properties of the generators categorized in two classes and five groups based on their dynamics.
Motion ratio
Motion ratio
4.1. SDoF generators
The majority of the reported generators are of the SDoF class, which covers a widespread in motion ratios, efficiencies, and bandwidths. While efficiencies range from 0.001% to 27.5%, most work reports values between 0.1% and 1%. The normalized half-efficiency bandwidths ranged from 0.01 to 1.78.
4.1.1. Without end-stops
In this group three generators were found. The motion ratios found for this group are at the right of the spectrum presented in Figure 5. It can be observed that within this group the efficiency and motion ratio are correlated. The efficiency of 28% reported by Beeby et al. (2007) is the highest efficiency (according to FoM
G
metric) reported in energy harvesting literature. This work was also the only instance where bandwidth information was reported for this group. The half-efficiency bandwidth was 0.53 Hz around a
4.1.2. With soft-stops
The devices with soft-stops were reported seven times with motion ratios ranging between 7.62 and 409. The efficiencies of these devices ranged from 0.26% to 7.72% and the normalized half-efficiency bandwidths ranged from 0.2 to 0.58. In the work of Salauddin et al. (2016), the effect of the motion ratio on the efficiency was specifically tested by varying the amplitude of the driving motion for a fixed frequency. It was found that when the motion ratio was decreased from 56.81 to 34.09, the efficiency increased from 0.2% to 0.3%.
4.1.3. With hard-stops
In this group six generators were reported. With motion ratios between 0.56 and 65.9 and efficiencies from 0.001% to 1.17%, this group covers a large part of Figure 5. Moreover, in this group normalized half-efficiency bandwidths were reported between 0.1 and 1.78. Wang et al. (2017) reported testing their prototypes under six conditions varying the motion ratios at fixed frequencies and found that for small motion ratios
4.2. Frequency up-converters
The FupC class generators are reported predominantly on the left side of Figure 5, with motion ratios of 15 or less. Their motion ratios range from 0.025 to 14.54 and efficiencies are reported between 0.002% and 1.66%. The normalized half-efficiency bandwidths ranged from 0.071 to 3.08.
4.2.1. Using impact
In this group four generators were found. The motion ratios of these devices ranged from 0.35 to 14.54 and their efficiencies between 0.011% and 0.83%. The normalized half-efficiency bandwidths ranged between 0.071 and 0.72. Moreover, the prototype reported by Ashraf et al. (2013b) was also tested for a fixed frequency. When the motion ratio was decreased from 248 to 13, the efficiency increased from 0.088% to 0.83%.
4.2.2. Using plucking
Finally, five examples of frequency up-converters using plucking were found. Their motion ratios ranged from 0.025 to 14.13 and efficiencies between 0.002% and 1.66% were reported. The normalized half-efficiency bandwidths were reported between 0.336 and 3.08. The prototype of Pillatsch et al. (2012) reported the lowest motion ratio and largest normalized bandwidth found in the literature at
5. Discussion
The widespread in efficiency of the reported energy harvesters can be attributed to the number of variables that contribute to the final efficiency. First of all, there are great differences in the degree of optimization and overall quality of the transduction elements, the mechanical structures, and the power conditioning circuitry. Next, there are great differences in the types of dynamics that are employed and the operating conditions under which they are evaluated.
For example, in linear systems the maximum power output coincides with the maximum efficiency at the resonance point, and it is a common practice to evaluate the performance at this point. However, for non-linear systems this is not necessarily true and the performance is commonly evaluated at the point of maximum output power, which is not necessarily the point of maximum efficiency. Finally, at least some of the spread can be attributed to the uncertainty that comes with the estimation of some of the parameters that were not explicitly reported by the authors of the experimental work. When the references are grouped by publication year, it can be found that the efficiencies of the reported generators converge over time. This can be an indication of the maturing of the field. Moreover, it is likely that the adoption of established strategies and designs is the main contributor in this aspect.
5.1. SDoF generators
5.1.1. Without end-stops
When generators in this group are driven at resonant condition, amplification of the driving motion is achieved with a ratio that (for
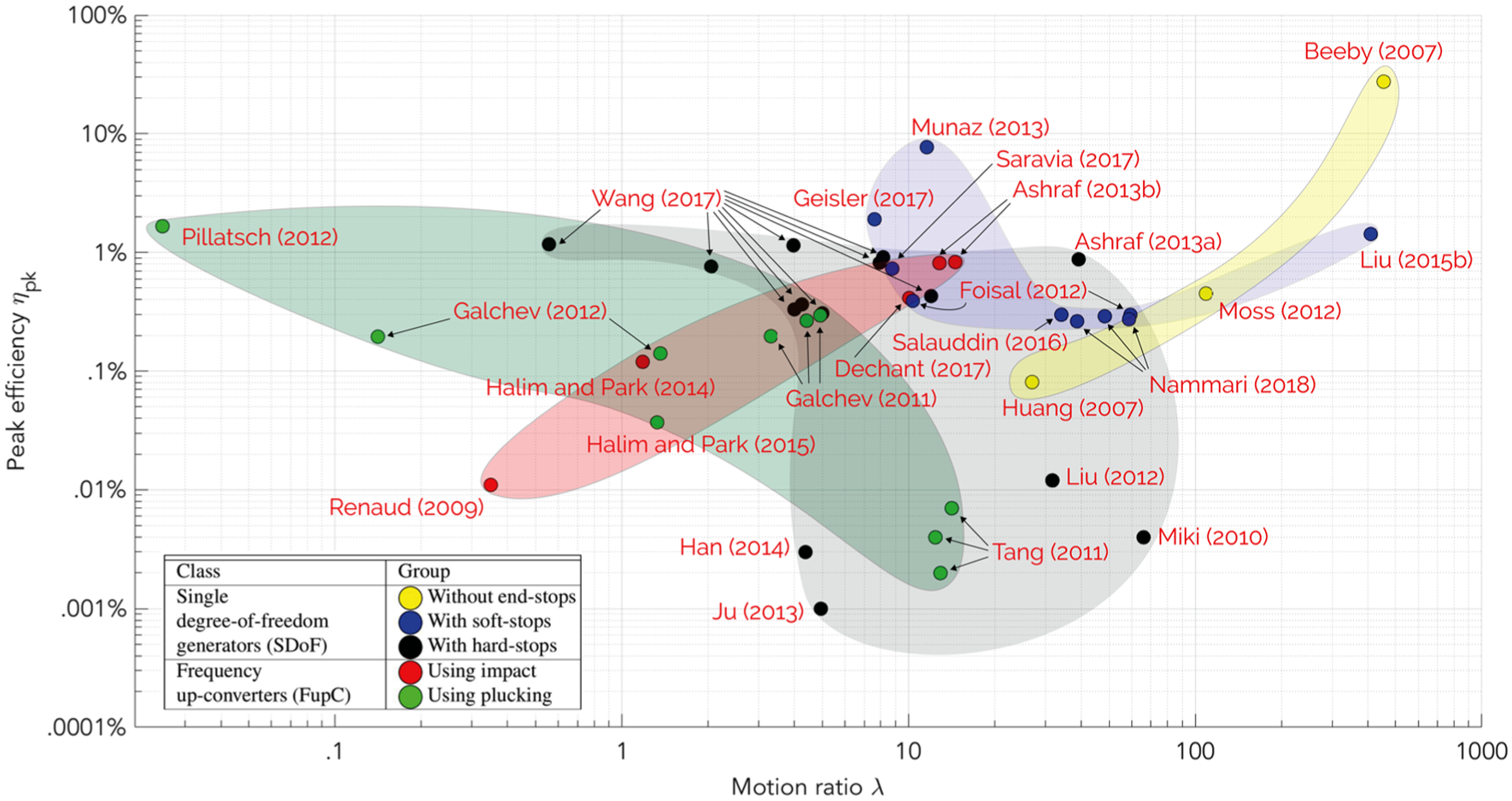
In practice, the upper limit for the amplification factor also depends on the dimensions of the generator and is therefore directly related to the motion ratio of the device. As a result, it can be expected that SDoF generators without end-stops demonstrate higher efficiencies at larger motion ratios. This is supported by the data shown in Figure 5, where a clear correlation is found between efficiency and motion ratio in the SDoF generators without end-stops. Furthermore, none of these systems were found for lower motion ratios, which indicates that these are not favorable conditions for a SDoF system without end-stops.
5.1.2. With soft-stops
Within the group of SDoF generators with soft-stops two embodiments are found. In Figure 5, two groups of points can be observed around
In terms of dynamics, the same principles as with the SDoF generator without end-stops hold. Therefore, it should be expected that higher efficiencies are demonstrated at larger motion ratios. However, the normalized bandwidths of generators using soft-stops are much larger compared to generators without end-stops. In general, the use of soft-stops allows an increased bandwidth and a lower motion ratio and therefore a greater degree of miniaturization at the cost of a reduced efficiency.
5.1.3. With hard-stops
SDoF generators with hard-stops are found in different embodiments and are found in a broad range of motion ratios and efficiencies. Compared to the soft-stop, the ratio between the travel stiffness and the hard-stop stiffness can be extremely large which allows very small motion ratios and therefore a large degree of miniaturization. In general, the kinetic energy of the mass upon engaging the hard-stop is lost which may greatly hurt the efficiency of these systems. In terms of bandwidth, it can be seen from Figure 6 that large normalized bandwidths can be obtained for these devices. Furthermore, it was observed that increased bandwidths are found for lower motion ratios.
5.1.4. Comparison between SDoF generators
Within the class of SDoF generators, it can be observed that the different groups are reported at different ranges of motion ratios, efficiencies, and bandwidths. SDoF generators without end-stops are only reported at larger motion ratios, report the greatest efficiency and the narrowest bandwidth. At very small motion ratios, exclusively SDoF generators with hard-stops were reported. Although their reported bandwidths are much greater, their efficiencies are generally lower due to the loss of kinetic energy when the hard-stops engage. Between those groups the soft-stopped generators are reported. In this group, generators are reported with slightly lower motion ratios compared to those without end-stops, but greater efficiencies compared to those with hard-stops. In general, a correlation can be found between the motion ratio and the efficiency of SDoF generators.
5.2. Frequency up-converters
5.2.1. Using impact
In the group of FupC generators two embodiments can be found. First, there are the systems where an inertial mass impacts on the secondary oscillator. In Figure 5, the two lowest efficiencies of this group are linked to these embodiments. Next, there are the systems where the secondary oscillator is mounted on top of an impact member, which impacts on an end-stop. It was found that these systems reported larger efficiencies compared to the other group.
5.2.2. Using plucking
In the group of plucking FupC generators three embodiments were found. The two generators with the smallest motion ratios made use of a secondary oscillator that was latched magnetically to an inertial body and detached upon excitation. These designs demonstrated the greatest normalized bandwidths of all reported energy harvesters. One design based on mechanical contact was reported and is found in Figure 5 in the middle of the group. The two designs with the largest motion ratios used piezoelectric beams with a magnet at the tip that was repelled by a magnet on the passing inertial mass.
5.2.3. Comparison between FupC generators
Between the groups of FupC no convincing evidence was found that one group would have an advantage compared to the other in terms of motion ratio, efficiency, or bandwidth.
5.3. Comparison between SDoF and FupC generators
The most striking difference between the groups of SDoF and FupC generators is the motion ratio at which they are reported; SDoF systems are mostly reported on the right side of Figure 5, while FupC systems dominate the left side. At the larger motion ratios, the SDoF systems report higher efficiencies compared to the FupC. Reasons for this could be the significantly larger amount of reported work on SDoF generators and the increased complexity of the dynamics of FupC. However, at the lower motion ratios it could be argued that FupC systems may be more efficient than SDoF systems. For example, in the results of the two works of Ashraf et al. (2013a, 2013b), a SDoF generator and FupC are reported with a similar design, shape, and volume and tested under similar conditions. At a motion ratio of approximately
Another important property of the energy harvester is the bandwidth. Although SDoF generators have the highest peak efficiency, they are very sensitive to changes in the frequency of the driving motion. As a result, their practical use is greatly limited by the narrow range of frequencies where this efficiency is achieved. The non-linearities as a result of the end-stops or the use of a FupC strategy can greatly improve the efficiency over a much wider bandwidth. This can also be clearly observed from the differences between the groups in Figure 6.
5.4. Recommendations
The first recommendation is to consider the motion ratio at an early stage in the design process of the generator, similar to the frequency ratio
6. Conclusion
Although motion energy harvesting at the small scales has been a research topic for over 20 years, the implementation of such generators remains limited in practice. One of the most important contributing factors here is the poor performance of these devices under low-frequency excitation. In this research, the efficiencies and bandwidths of small-scale generators are studied through two new metrics. The generator figure of merit, FoM
G
, is a variation in an existing efficiency metric, which can facilitate a better comparison between generators by making it independent of shape and material. From this metric, the peak efficiency
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is part of the research program Rethinking Energy Harvesting for MEMS (REH-MEMS) with project number 14379, which was financed by the Stichting voor de Technische Wetenschappen (STW) and the Netherlands Organization for Scientific Research (NWO).