
Abstract
This article provides a systematic approach for synthesizing a novel robust synergetic control mechanism. This controller employs a dynamic global terminal synergetic surface with additional sinusoidal function. The overall macrovariable gives the system a rapid approaching rate, maintains the finite time stability, and provides a chattering-free control law. The stability analysis is validated for any uncertain second-order system via indirect approach of Lyapunov theorems. Furthermore, a hyperbolic tangent nonlinear disturbance observer is designed in order to estimate any lumped disturbance. The feasibility and the effectiveness of the proposed composite control law is tested and evaluated through simulations for simple model, wind turbine system and DC-DC buck converter. Finally, the simulation results show that the presented dynamic global terminal synergetic control–based hyperbolic tangent nonlinear disturbance observer can effectively reject the disturbances, enhance the robustness, and guarantee the tracking accuracy and rapidity.
Keywords
Introduction
It is widely acknowledged that the vast majority of dynamic systems exhibit nonlinear behavior. Nevertheless, the challenge of controlling such systems with uncertainties remains a crucial research area in the field of control engineering. In recent years, scientific communities have designed a number of unconventional control algorithms, including sliding mode control (SMC),1–5 fuzzy logic type I and type II controllers,6,7 model predictive control,8–10 model independent control,11,12 and back-stepping control. 13 All these approaches have found use in diverse applications; for instance, in Cuvillon et al., 8 an offset-free nonlinear model predictive control (NMPC) was designed to mitigate platform vibration and reduce the tracking error along complex trajectories of cable-driven parallel robots. The experimental results show that the proposed offset-free NMPC yields lower tracking errors than the nominal NMPC. The work presented in Tahamipour et al. 14 studies a three prismatic-series-prismatic parallel robot, in which the authors propose a generalized hyperbolic fuzzy type II control. The study established that the mentioned synergistic framework of fuzzy type II offers superior handling of unknowns and entails a simpler computational complexity compared to other fuzzy systems.
Structure variable control (SVC) has emerged as the most widely employed and successful control approach among the several methods presented for highly nonlinear systems, cascaded system, and hybrid 15 due to its robustness and simplicity. 16 However, SVCs are vulnerable to low convergence speed rate and serious chattering issues resulting from excessive switching control gain. 17 In literature, several sliding mode controllers with new structure of surfaces and reaching laws have been discussed for addressing the aforementioned drawbacks and ensuring the finite time stability and enhancing the performance rapidity. In Wang et al., 18 Mozayan et al. 19 suggested improved reaching law based on exponential variations for controlling permanent magnet synchronous motor (PMSM) drive and permanent magnet synchronous generator (PMSG) wind turbine system, respectively. In Pan et al., 20 Halledj and Bouafassa 21 developed novel reaching laws with dynamic power terms in order to force the system states through the sliding surface as quick as possible, especially when the states are close to the attractor region. Although these mechanisms significantly enhance the convergence speed, the chattering effects still persist. On the other side, various types of SMCs with nonlinear surfaces have been studied22,23 to guarantee the tracking errors of systems. The terminal sliding mode scheme is commonly used for this purpose, but it suffers from slow convergence speed and singularity issues. Many scholars have tried to address the aforementioned problems. In Guo et al., 24 the singularity issue has been successfully avoided via nonsingular terminal SMC in hydraulic servo systems. Pan and Zhang 25 designed a nonsingular fast terminal SMC (FTSMC) for controlling two link rigid robot manipulator. Moreover, Barambones et al. 26 proposed a high-order SMC based on super-twisting algorithm for controlling the wind turbine speed and improving the maximum power extraction.
Despite the significant efforts made by scientific scholars to solve the issues in SVC approach, the chattering problem persists due to the discontinuous term in controller, leading to high oscillation in control law and consequently deteriorating the system performance. Numerous approaches have been proposed in literature to reduce the control law oscillation. Babes et al. 27 developed adaptive switching gain based on fuzzy universal approximation intending to find the optimal switching gain for reducing the chattering. However, reducing chattering increases the system’s sensitivity to uncertainty. 28
Based on the preceding analysis, it has been determined that synergetic theories offers the best solution for eliminating the chattering phenomenon.29,30 Synergetic control (SC) is a dependent model approach originating from control science that depends on self-organization theory and the usage of nonlinear characters of system dynamics; it is similar to SMC and retains all the advantages of SMC such as robustness against the unknowns, simple in practical implementation, and simple stability analysis guarantees. 31 Since SC runs at fixed constant frequency, this controller becomes more efficient in suppressing the chattering than SVCs. This criterion gives a significant path to the researchers in order to apply it in various applications.32–34 In classical models, synergetic controllers have suffered from infinite time convergence which may result in undesirable performances. For possible enhancement, a nonlinear macrovariable could be suggested in order to increase the speed convergence like terminal SC and nonsingular terminal SC. Hagh et al. 35 developed a new robust proportional integral as attractor region, combined with nonsingular terminal synergetic as macrovariable for nth order nonlinear systems. This study solved the problem of infinite time convergence and enhanced the robustness against uncertainties. However, it should be noted that this controller requires a complex computation, and it would fail at some rapid time-variant disturbances. In a similar study, Asl et al. 36 applied fuzzy type II to tune the parameters of nonsingular synergetic controller, providing a critical solution when system parameters vary over time. Moreover, Rajendran et al. 37 proposed a terminal integral synergetic controller for wind turbine at region II using two mass model with speed estimator in order to improve the maximum power point taking (MPPT) of wind systems, reduce the control input, and drive train oscillations.
In disturbance point of view, a compensation of external disturbances is one of the major aspects in control theory. In literature, robust controllers have been proposed in order to overcome mismatched disturbance such as
Motivated by the above analysis, this article is devoted to suggest a novel dynamic robust controller based on SC for second-order uncertain systems to suppress the chattering, ensure finite time stability, and increase speed convergence rate. Moreover, it can be used to estimate very fast disturbances and solve the problems faced in previous controller described in literature. 35
The main contributions of this article are summarized in threefold as:
A novel nonlinear global terminal SC with dynamic state variant coefficients is developed, which can guarantee global finite time stability and enhance both transient and steady state response.
A hyperbolic tangent nonlinear disturbance observer (HTNDO) is designed for predicting any time-variant lumped disturbance even though that has a fast time response.
A novel composite control scheme is suggested by integrating a novel dynamic global terminal synergetic control (DGTSC) and HTNDO in order to form a new anti-disturbance control based on nonlinear dynamic synergetic controller rather than SMC.
The rest of the article is organized as follows: the composite control DGTSC-HTNDO scheme is detailed in the section “Controller design and stability analysis.” The “Results and discussion” section highlights the dynamic response of the suggested control algorithm when applied to second-order system, that is, a simple model, wind turbine system, and DC-DC buck converter. Finally, the conclusion of this article is given in the final section.
Controller design and stability analysis
As mentioned earlier in the “Introduction” section, one of the key drawback of the SMCs is the chattering phenomena, and in response of this issue, SCs have been proposed. In this section, a novel dynamic SC with nonlinear disturbance observer for uncertain second-order system is introduced. This structure ensures chattering-free, finite time convergence speed, fast response, and robustness against any bounded lumped disturbances.
Dynamic global SC
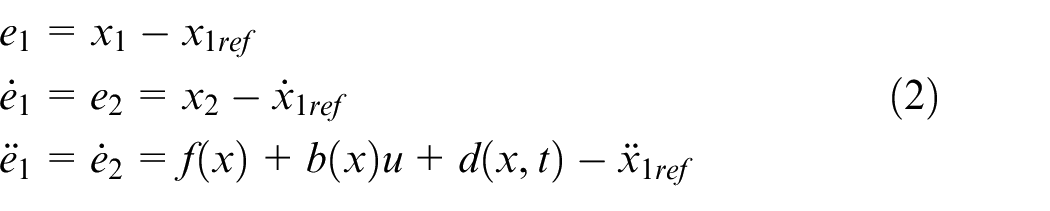
Considering uncertain nonlinear second-order system expressed as

where
The error dynamic of equation (1) can be expressed as follows
Now, the proposed dynamic macrovariable

where
In order to design an SC that drives the error dynamic to macrovariable, a manifold is required and it can written as

where

where
To solve
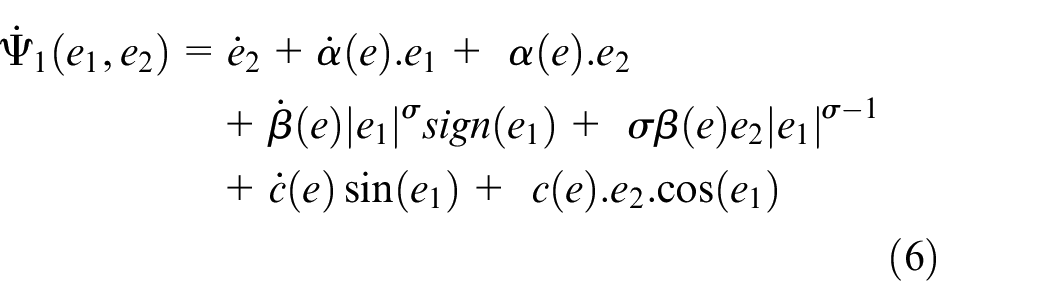
Substituting equation (2) in equation (6), yields
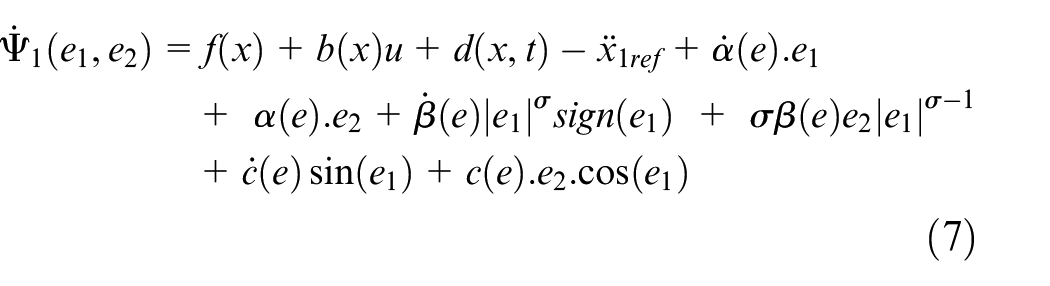
By substituting equation (7) in equation (5), the mentioned manifold expression can be rewritten as described in equation (8) as
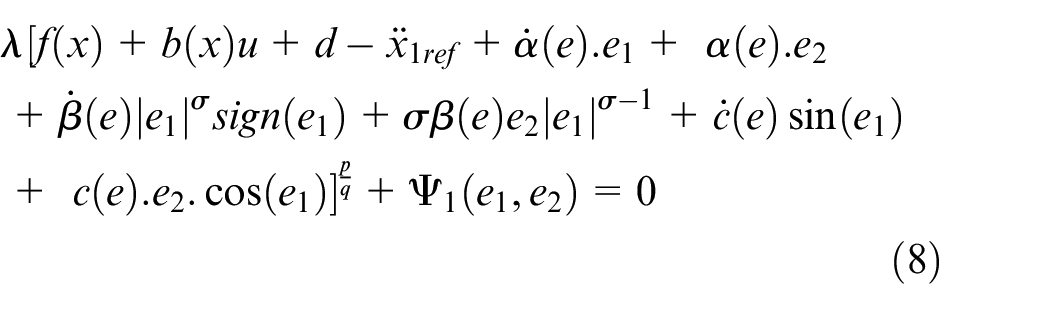
The control law suggested can be computed through straightforward calculations as

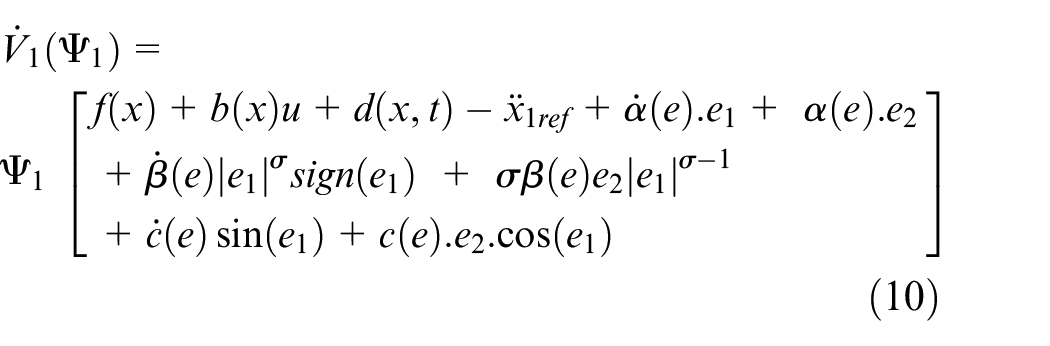
Inserting the equation (9) into equation (10), yields to
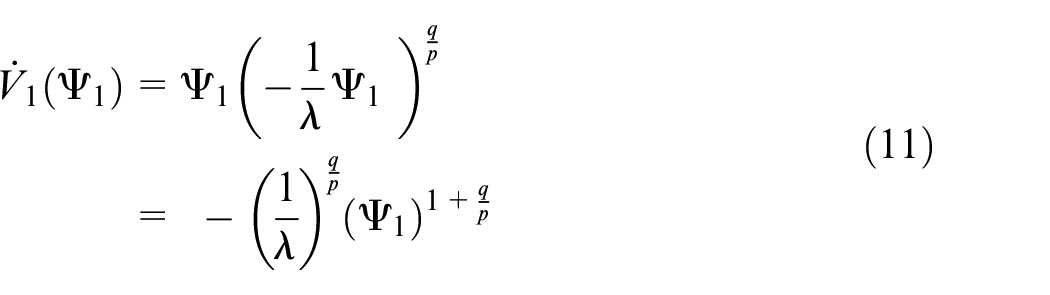
As it can be seen from equation (11),
To further elucidate the information provided by equation (11), a different representation can be obtained through the following rewriting
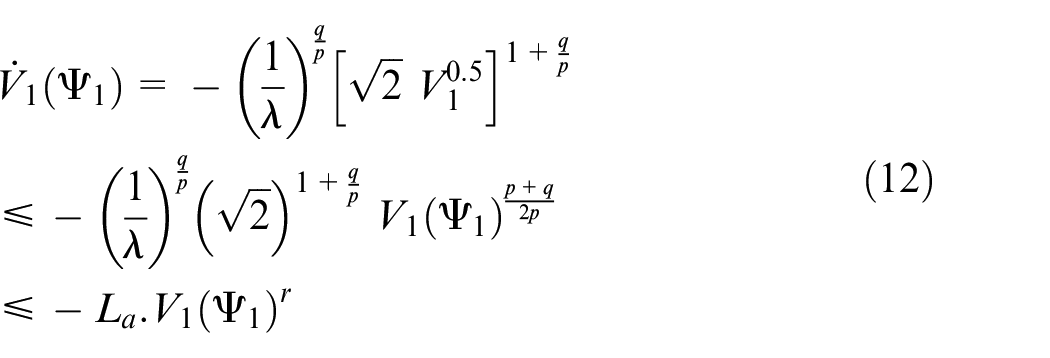
where
The following inequality

where
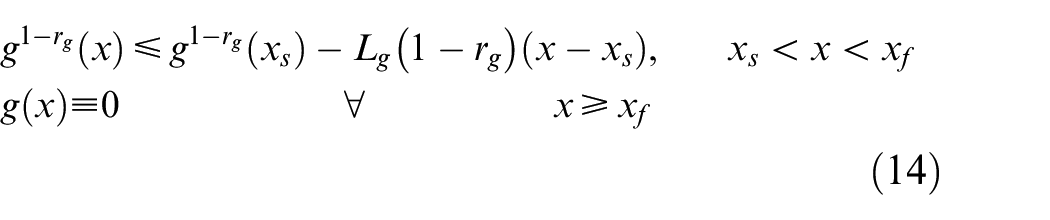
In which,
According to lemma 1, we can conclude by analogy that

Proof is completed.
Furthermore, it can be also deduced that the proposed macrovariable
Characteristic analysis
When

In order to guarantee the error dynamics can quickly converge to the origin regardless of the initial conditions, the dynamic coefficients
In which,
The effects of the proposed parameters on the behavior of
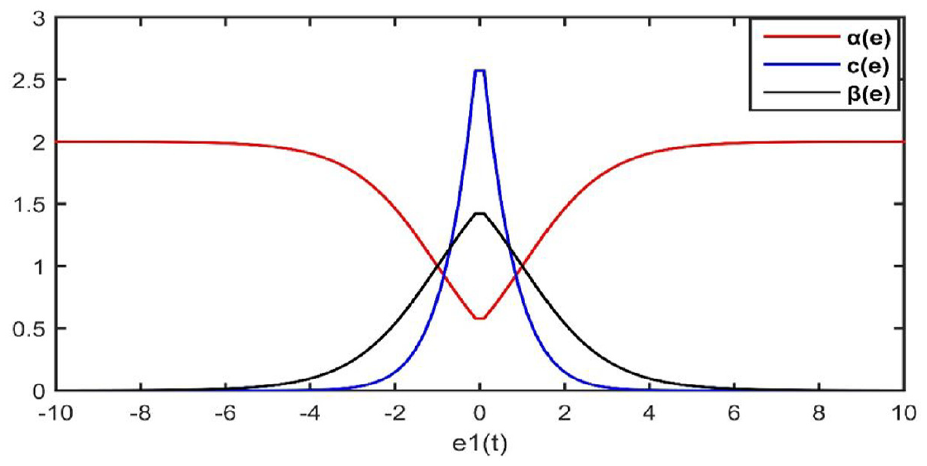
Parameter coefficients of
When
where
Error dynamics trajectory at
In control engineering, the analytic proof is necessary, and the stability analysis using Lyapunov method will be introduced.

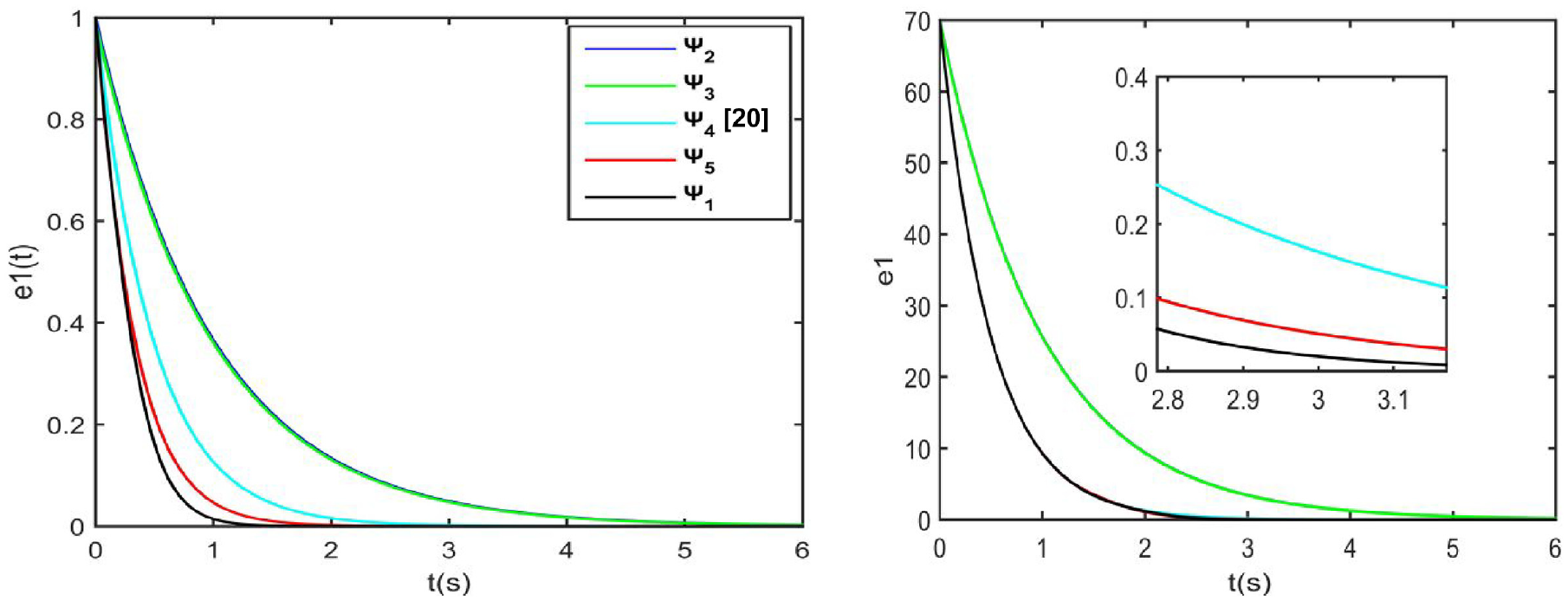
It is clear to see from equation (19) and Figure 3, the system described in equation (16) is globally asymptotic stable (GAS).
The time derivative of
As we mentioned before, the dynamic coefficients have a major/minor playing role. Therefore, this mechanism works according to the value of error dynamics. Therefore, the macrovariable
Stage I:
The term
Stage II:
The term
Stage III:
The third term of equation (3) is added to the second term and both of them play the major role

Note:
Thus, the total time for
It is clearly noticed that
Proof is completed.
Observer design
In this section, a HTNDO is designed for estimating lumped disturbances and improving the anti-disturbance ability of control system. This type of observer has simple structure, good estimation effects when it compared to conventional nonlinear disturbance observers,35,43,44 and is able to suppress measurement noise. 45

If
The presented HTNDO in Chen et al. 45 is helpful in the proposed control design. The mathematical presentation is described in equation (25) as
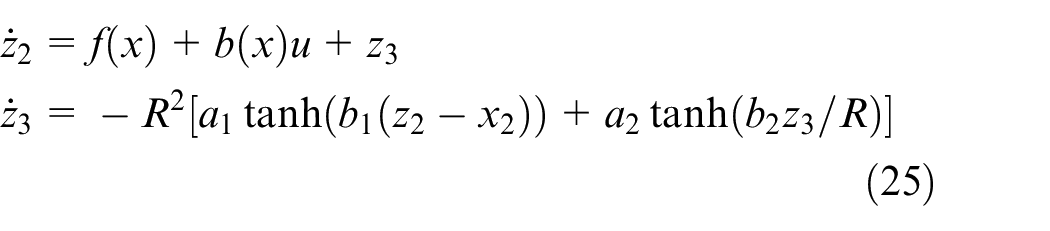
In which,
Using some basic calculus, when
Based on the output of HTNDO presented in equation (25), the composite anti-disturbance control (DGTSC-HTNDO) is designed as
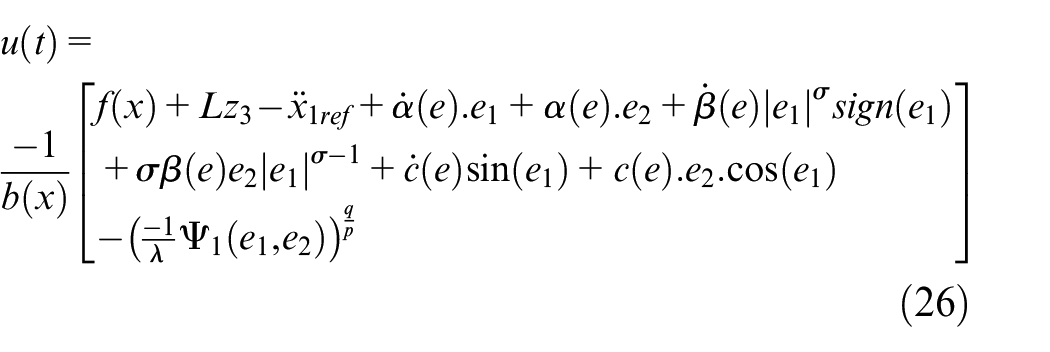
Where: L is normal number,
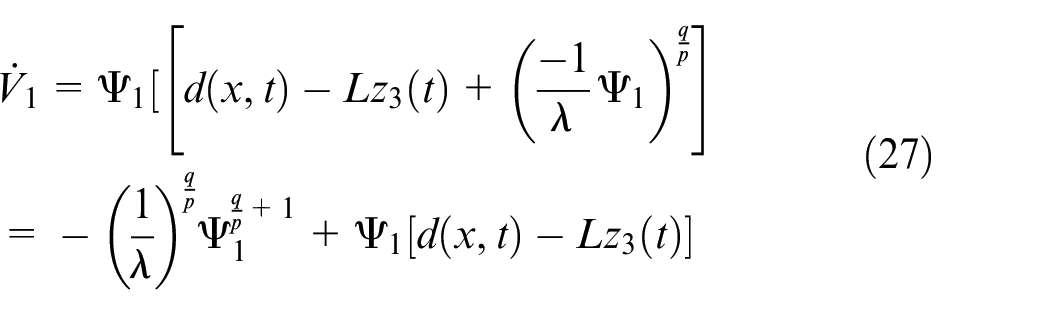
Inserting equation (25) into equation (27) gives
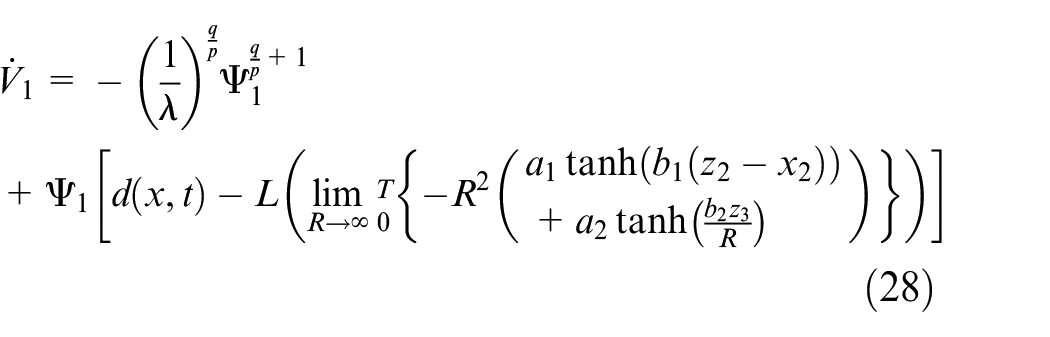
Whenever R and T are large enough,

Based on lemma 1 and lemma 2, we can conclude that
Proof is completed.
Results and discussion
In this section, the proposed anti-disturbance composite controller is applied to simple model, wind turbine system, and DC-DC buck converter. The simulation results validate the effectiveness and feasibility of the suggested scheme.
Simple model
Consider a simple model with the following state space presentation

The lumped disturbance is supposed to be
A DGTSC-HTNDO is developed for stabilizing the system described in equation (30)

The parameters of both controller and observer are set as
For further verifying the feasibility, others controllers as SMC
where
From Figure 4(a) and (b), it can be seen that the system states converge rapidly into (0,0) when DGTSC-HTNDO is applied. Figure 4(c) and (d) present both phase trajectory and marco variable of the closed loop system. Figure 4(c) shows that the state
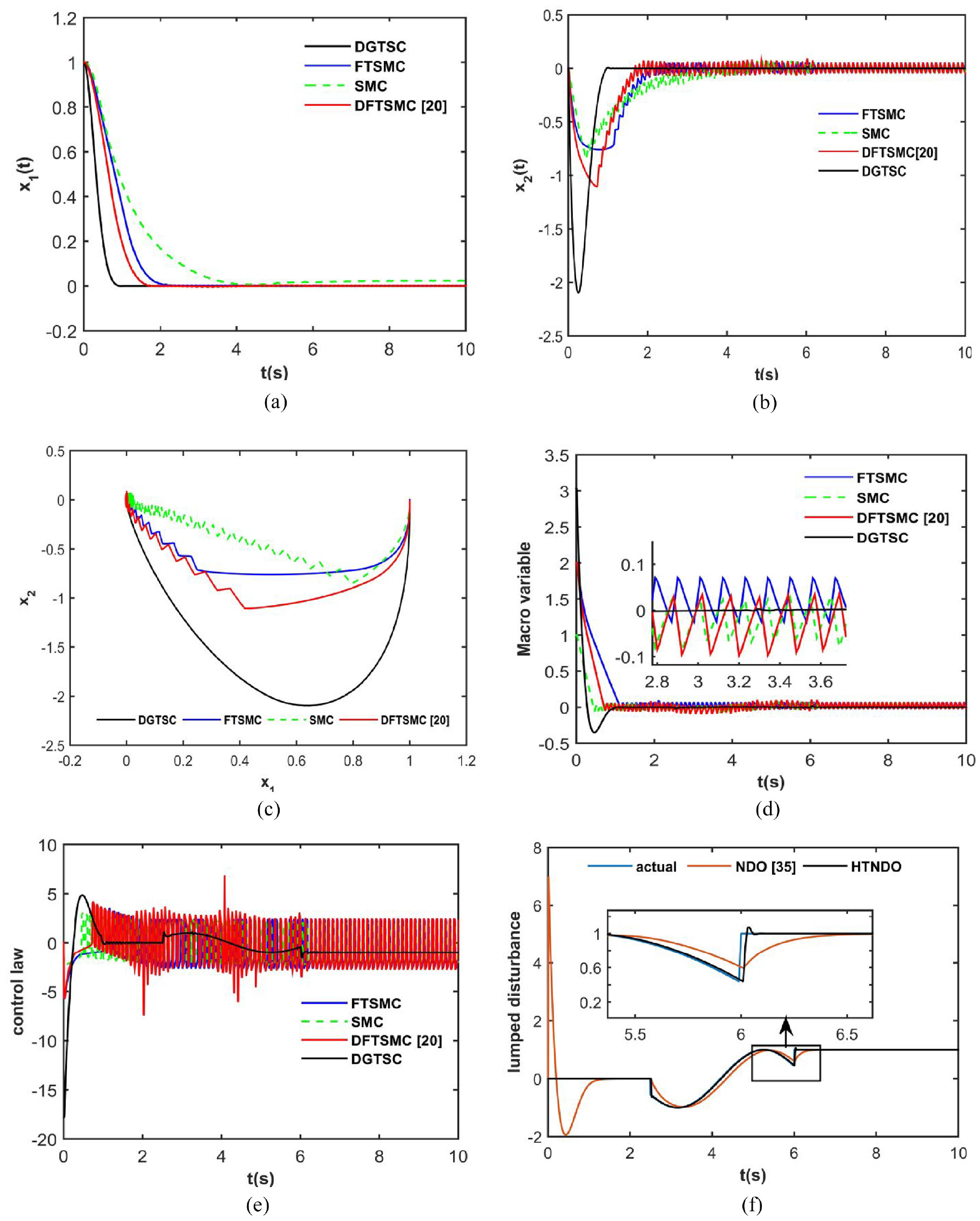
(a) State
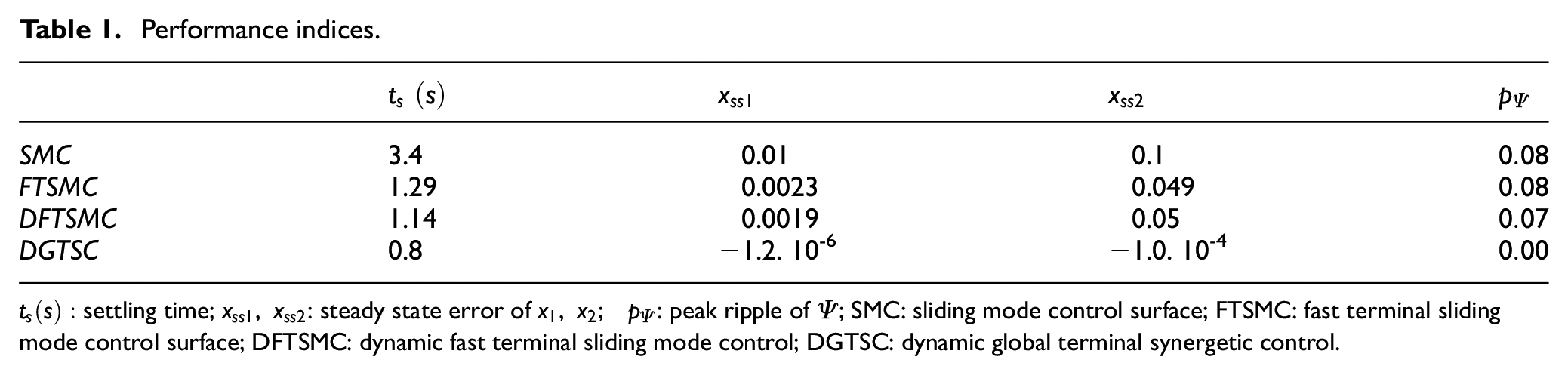
Performance indices.
Wind turbine system
Wind turbine system mainly consisted of three subsystems: aerodynamic model, generator subsystem, and driven-train subsystem.
i. Aerodynamic subsystem
Usually, the aerodynamics power

in which,
where
ii. Generator subsystem
The generator model can be expressed by the following differential equation 46

where
iii. Train driven subsystem
The dynamic properties of driven-train system can be written as Zhang et al. 47


It come then

where

In order to get the dynamical model of wind turbine system, we need to combine equations (33), (35), and (38)
where
The experimental parameters of wind turbine system are discussed and listed in Ma et al. 46
In this case, we are ready to force the angular speed
For comparison purpose, the controller described in equation (26) is applied for second-order wind turbine system as

In which,
Figure 5 presents the performance tracking of wind turbine system via different advanced controllers. As we have seen, the proposed DGTSC-HTNDO can force all of rotor speed and power coefficient to quickly reach the desired values
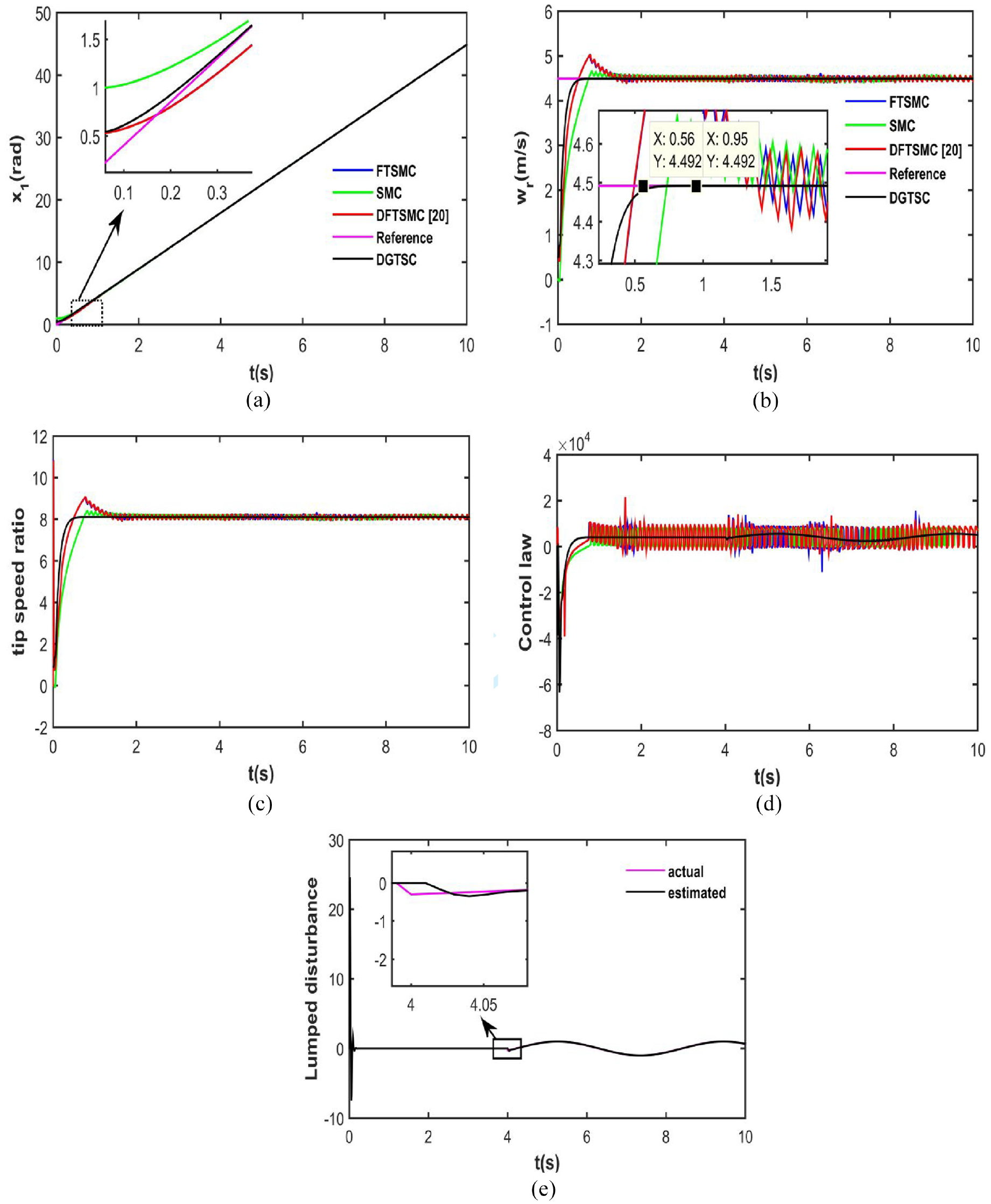
Performances of case 1: (a) Position state, (b) angular velocity
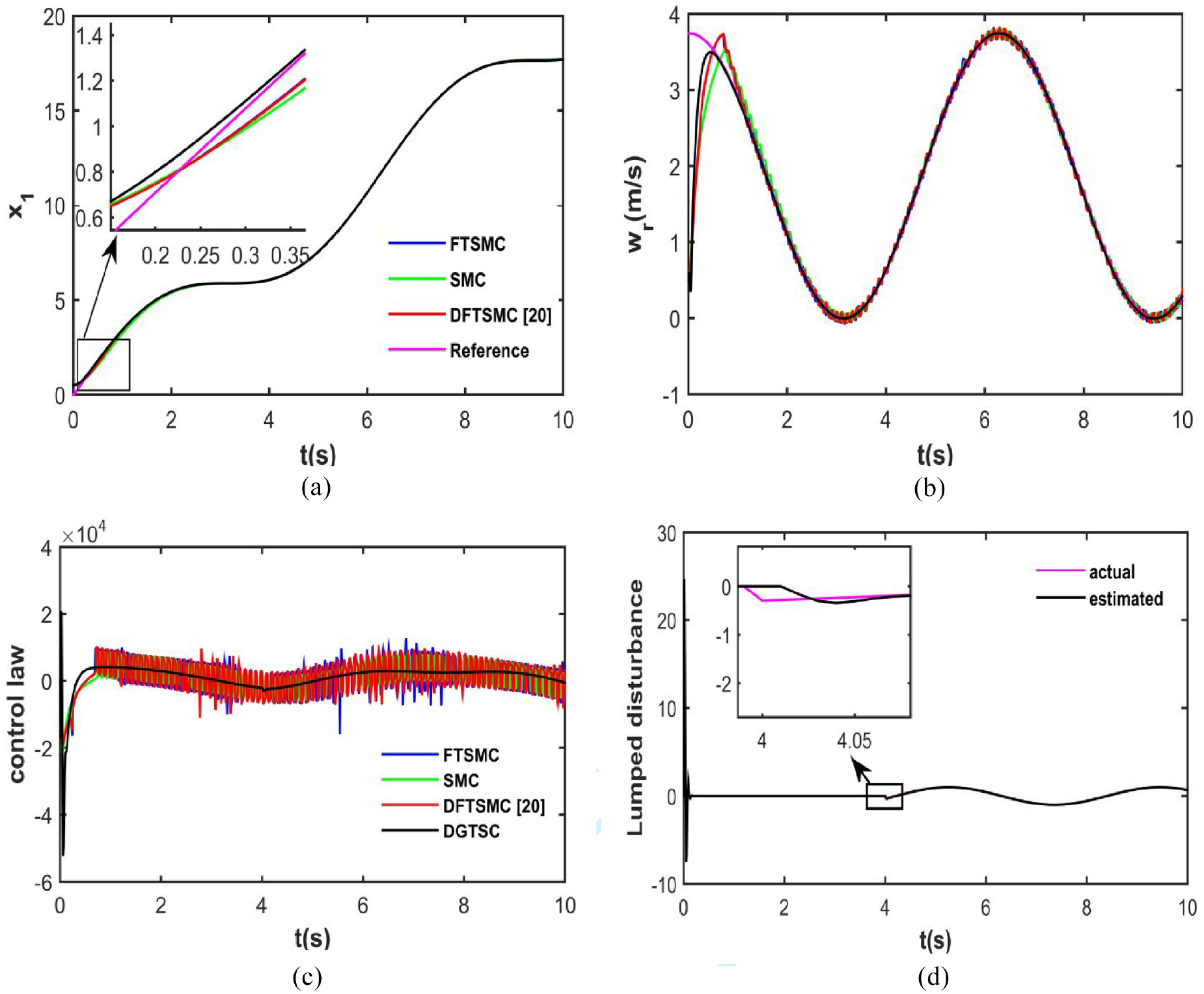
Performances of case 2: (a) Position state, (b) angular velocity
DC-DC buck converter
In this section, another application is used to further illustrate the feasibility of the composite control scheme. The average model of the circuit depicted in Figure 7 can be expressed as

where
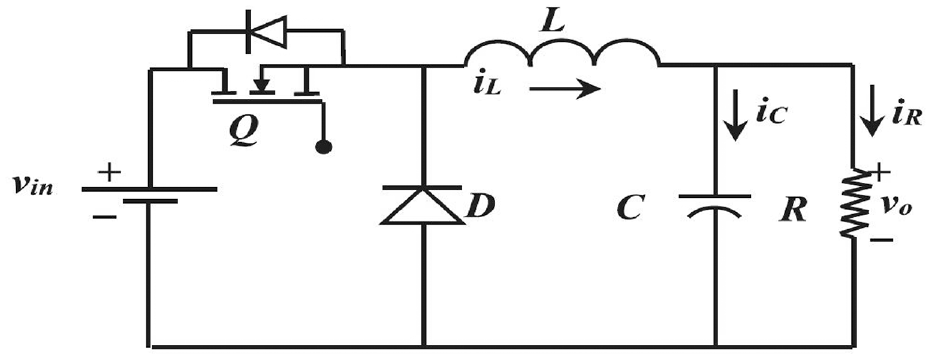
DC-DC buck converter circuit.
The main aim is to force the system to follow a lower output voltage than its input value. Therefore, the error dynamic presentation is required

Let
Next, according to DGTSC-HTNDO technique, the controller is designed as
The composite control coefficients are chosen as
To validate again the effectiveness of the proposed control algorithm in power electronic devices, two tests scenarios are illustrated to prove its benefits in terms of robustness and shorten time response. In addition, an anti-disturbance FTSMC based on improved quick reaching law 21 is designed for comparison purpose as

With:

All the controller coefficients are listed in Halledj and Bouafassa. 21
i. First scenario: in this test, we set the following conditions:
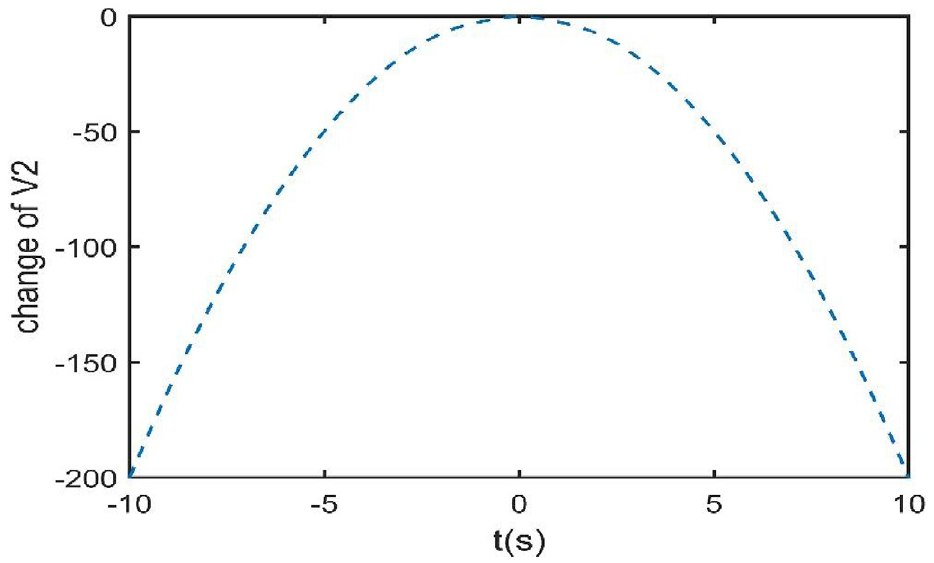
Figure 8 presents the output voltage of DC-DC buck converter under resistance variation. It can be seen that the proposed controller improves the robustness and convergence speed rate. In addition, the settling time of buck system becomes lesser than
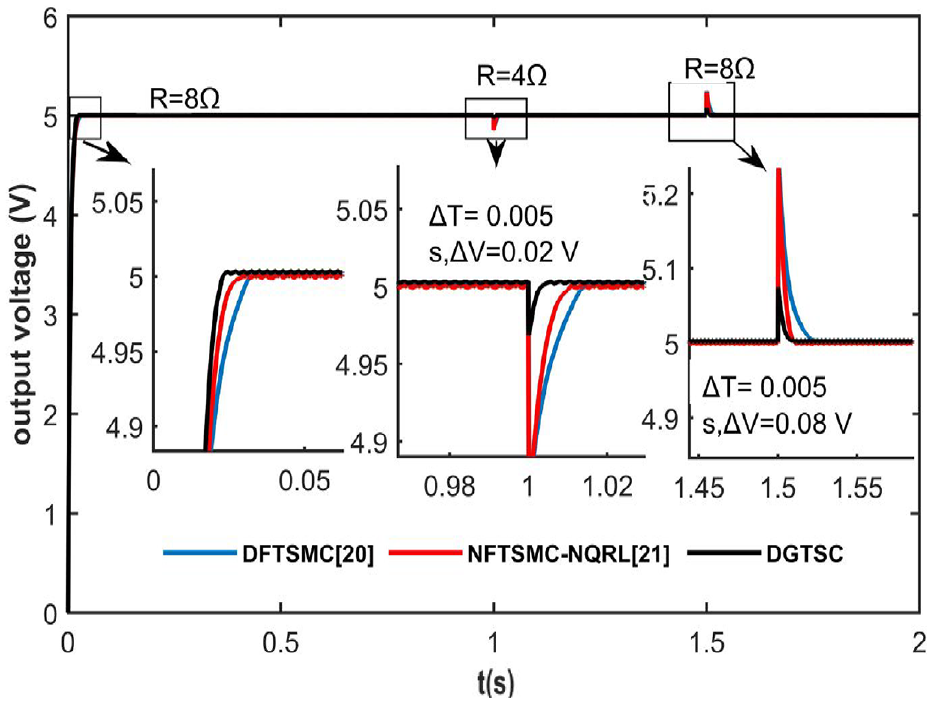
Output voltage under resistance change.
ii. Second scenario
In this experiment, we try to select again
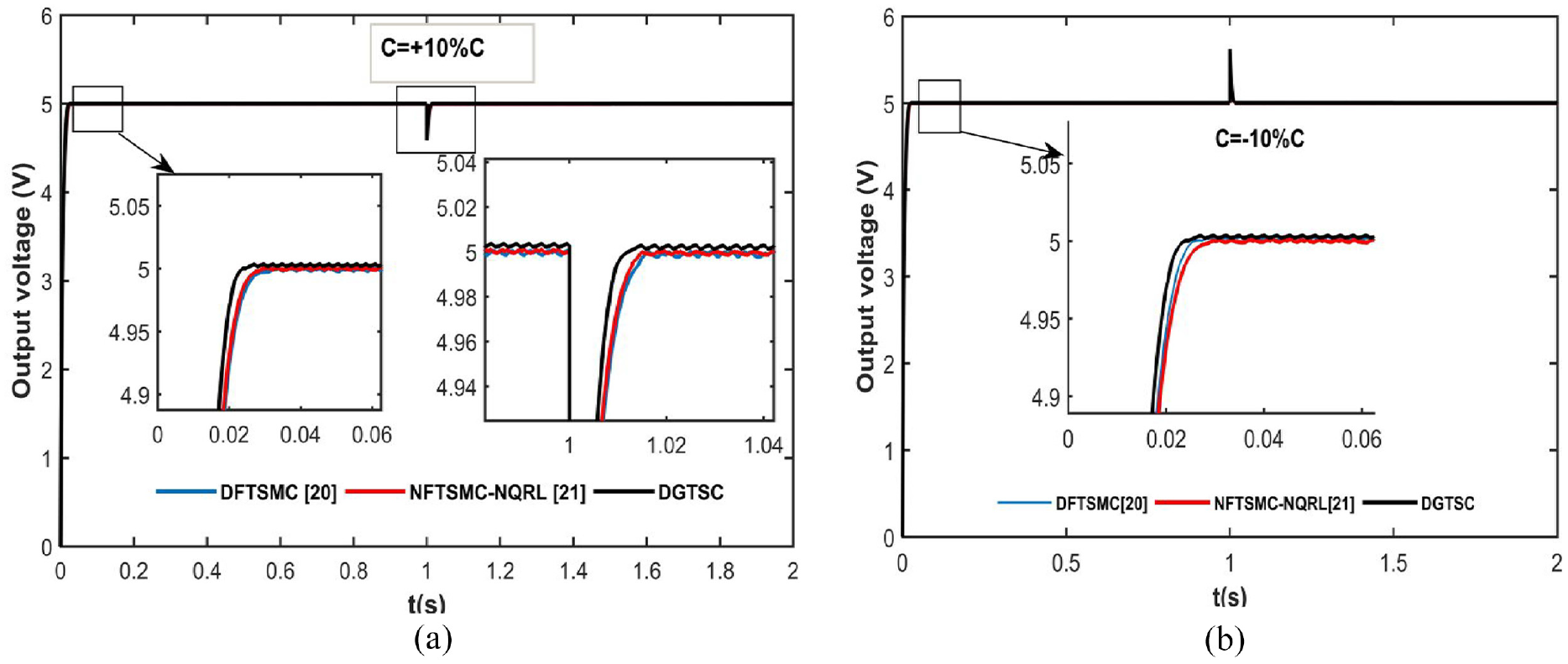
(a), (b) Output voltage under increasing and decreasing of capacitance value, respectively.
Conclusion
In this article, a DGTSC-HTNDO is investigated for uncertain second-order systems. The presented approach uses a synergetic macrovariable, augmented with additional sinusoidal function, to drive system states toward a desired point and improve the convergence rate, especially when the system trajectory is in vicinity of equilibrium point. To mitigate the effects of lumped perturbation, a HTNDO is designed to accurately predict disturbance. This estimation is used in the proposed closed loop control law. Results confirm that the suggested algorithm outperforms variable structure controllers in terms of robustness, accuracy, and convergence rapidity. Furthermore, the proposed synergetic regulator addresses the issue of chattering phenomenon. Finally, it is pertinent to note that the SC approach could be also extended to other complicated nth order systems, which would be the subject of future study.
Footnotes
Appendix 1
The time derivative of controller coefficients could be expressed as
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.