
Abstract
In this article, an immersion and invariance based adaptive command filtered backstepping control method (I&I ACFBC) is proposed for a class of single-input and single-output (SISO) uncertain nonlinear systems in strict-feedback form. The problem of the explosion of complexity inherent to the traditional adaptive backstepping control design is solved by applying the proposed adaptive control technique, and the compensating signals are constructed to reduce the effect of the known filtering errors produced by the command filters. The adaptive laws are achieved by an immersion and invariance method. The Lyapunov stability theory is utilized to ensure the boundedness of all the signals in the closed-loop system. The feasibility and validity of the proposed adaptive control scheme are demonstrated by the simulation and experimental results on a DC-DC buck converter system.
Keywords
Introduction
Over the past few years, the tracking control issue of nonlinear systems has attracted considerable attention. The adaptive control schemes for a class of uncertain nonlinear systems are one of the challenging fields of nonlinear control engineering problems (Kanellakopoulos et al., 1991; Soukkou et al., 2023a, 2023b; Tee et al., 2009). Most adaptive control techniques are based on the parameter estimation. It is challenging to develop efficient control strategies that can deal with the unknown parameters of nonlinear systems and achieve a better tracking performance. The adaptive backstepping control scheme has been widely investigated as an effective technique for a class of single-input and single-output (SISO) uncertain nonlinear systems in strict-feedback form (Ciliz, 2007; Kanellakopoulos et al., 1991; Krstić et al., 1995; Soukkou et al., 2023a; Soukkou and Labiod, 2015; Wang et al., 2016; Zhang et al., 2015; Zhou and Wen, 2008), and the stability of the closed-loop system has been proved by using the Lyapunov stability theory. The technique has been attracting considerable research attention recently. However, an obvious shortcoming existing in the adaptive backstepping control technique is the explosion of complexity problem induced by the repetitive differentiation of virtual control inputs. Recently, to overcome this problem, an adaptive dynamic surface control approach has been developed for strict-feedback nonlinear systems by introducing a first order filters (Soukkou et al., 2018, 2021, 2022; Soukkou and Labiod, 2017; Wang and Huang, 2005; Yip and Hedrick, 1998; Yu et al., 2015a). On the other hand, the adaptive command filtered backstepping control (ACFBC) approach has been introduced to solve the problem of the explosion of complexity and compensating signals have been designed to overcome the effect of the known filtering errors produced by command filters (Dong et al., 2010, 2012; Soukkou et al., 2019; Yu et al., 2015b, Yu et al., 2018a). Besides, adaptive finite time command filtered backstepping control scheme has been also proposed in (Li, 2019; Liu et al., 2021; Yang et al., 2019; Yu et al., 2018b, 2021).
The I&I based adaptive control method for nonlinear systems has been proposed as a novel design for the adaptive control and stabilization of nonlinear systems (Astolfi et al., 2003), which has received much attention (Astolfi et al., 2008; Han et al., 2018; Karagiannis and Astolfi, 2004, 2007, 2008; Zhang et al., 2013; Zhao et al., 2015). The design procedure consisted of two steps, the first step deals with the design of an estimator, and the second consists in designing a control law. Various nonlinear adaptive control strategies via I&I have been used for uncertain nonlinear systems in strict-feedback form such as adaptive backstepping control (Karagiannis and Astolfi, 2008; Monfared et al., 2013; Navabi and Soleymanpour, 2017), ACFBC (Hu and Zhang, 2013; Sonneveldt et al., 2010; Yu et al., 2021) and adaptive dynamic surface control (Fujimto and Yokoyama, 2012; Soukkou et al., 2021).
Motivated by the above discussions, an I&I ACFBC method for a class of uncertain nonlinear systems in strict-feedback form is developed in this paper. The proposed adaptive control scheme is employed to solve the problem of the explosion of complexity that exists in the conventional adaptive backstepping control design, and the compensation signals are designed to reduce the effect of known filtering errors caused by the command filters. Stability of the closed-loop system is proven under the Lyapunov stability analysis theorem. The effectiveness of the proposed adaptive control scheme is illustrated by simulation and experimental results for a DC-DC buck converter system. Compared with the most existing results, the main contributions of this paper are concluded as follows
By applying the proposed adaptive control scheme, we can deal with the problem of the explosion of complexity due to repeated derivatives of the virtual control signals existing in the adaptive backstepping control method, and the compensating signals are designed to reduce the effect of the errors attributed to the command filters. Furthermore, based on the proposed adaptive control technique, the boundedness of all the signals in the closed-loop system is achieved in contrast to the works in (Soukkou et al., 2021; Yu et al., 2021) that all the signals in the closed-loop system are proven to be uniformly ultimately bounded (UUB).
Compared with the results in (Dong et al., 2010, 2012; Soukkou et al., 2019; Yu et al., 2015b, 2018a), this paper uses an I&I scheme for adaptive parameter estimation.
Compared with the I&I based adaptive backstepping control (I&I ABC) method in (Karagiannis and Astolfi, 2008; Monfared et al., 2013; Navabi and Soleymanpour, 2017), the I&I ACFBC method in (Hu and Zhang, 2013; Sonneveldt et al., 2010) and the I&I based adaptive dynamic surface control method in (Fujimto and Yokoyama, 2012; Soukkou et al., 2021)), this paper further considers that the issue of the explosion of complexity caused by the repeated differentiation of the virtual control signals is avoided by introducing a command filter technique with a compensation mechanism.
The remainder of this paper is arranged as follows. The Problem formulation and preliminaries are given in “Problem formulation and preliminaries” section. In “I&I ACFBC design” section, an I&I ACFBC scheme and stability analysis are designed for uncertain nonlinear systems in strict-feedback form. In “Simulation and experimental results on the DC-DC buck converter system” section, simulation and experimental results on a DC-DC buck converter system are provided to show the validity of the proposed adaptive control method. The conclusions are presented in “Conclusion” section.
Problem formulation and preliminaries
Consider the SISO uncertain nonlinear system in strict-feedback form, given by
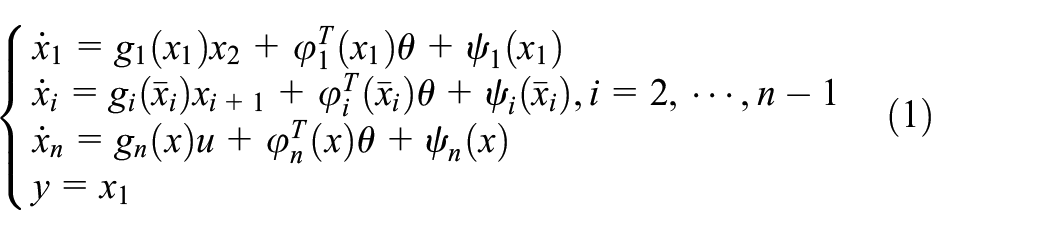
where
Throughout this article, to achieve the control objective, the assumptions of the system (equation (1)) are required.
I&I ACFBC design
The detailed design procedures of the proposed adaptive controller with stability analysis for the nonlinear system (equation (1)) are presented as follows.
Estimator design
Defining the estimation errors as

where
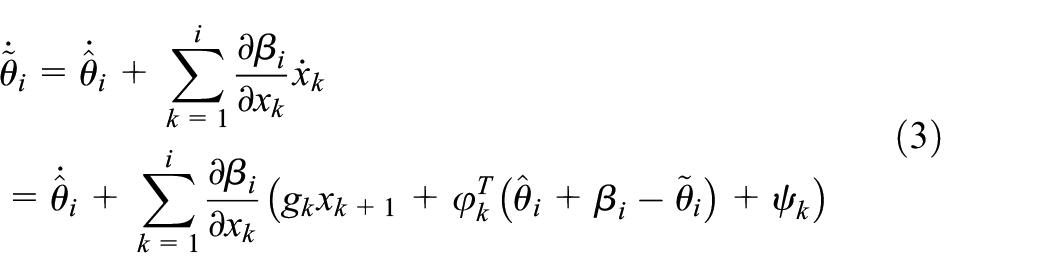
where

To cancel all the known parts of the

The functions

where

where

The following lemma of the proposed estimator can be established.

The time derivative of
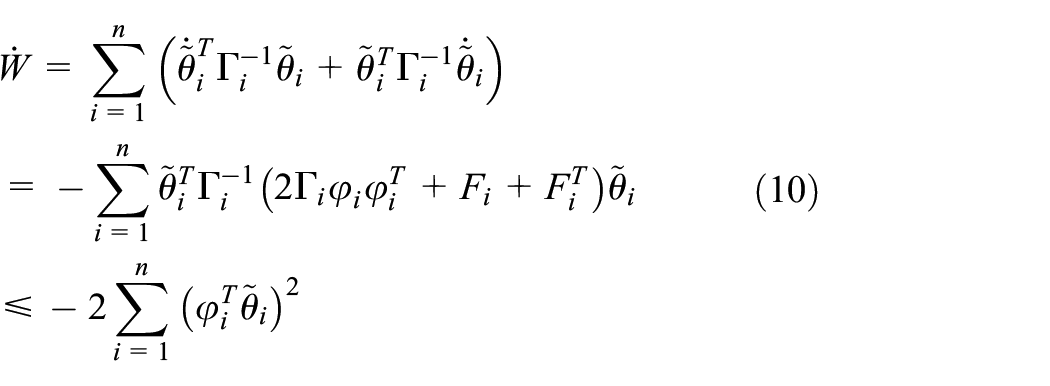
From equation (10), we establish that

Furthermore, if
Controller design
In this section, an I&I based adaptive command filtered backstepping controller is designed for uncertain strict-feedback nonlinear system described by equation (1) to guarantee the boundedness of all the signals in the closed-loop system. The controller design presented here includes command filters. Define the tracking errors as follows

where

where

with

Construct the virtual control signals



where
Now, the detailed design procedures of the adaptive controller are given as follows.
▪

Choose the Lyapunov function

The time derivative of

Substituting equation (16) into equation (21), we have

▪ Step

Consider the Lyapunov function

The time derivative of

Substituting equation (17) into equation (25) yields

▪ Step

Choose the Lyapunov function

The derivative of

Substituting equation (18) into equation (29), we can obtain

Based on Young’s inequality, we have

The time derivative of

For the stability analysis, the following theorem is established.

where

According to equations (10) and (32), the derivative of
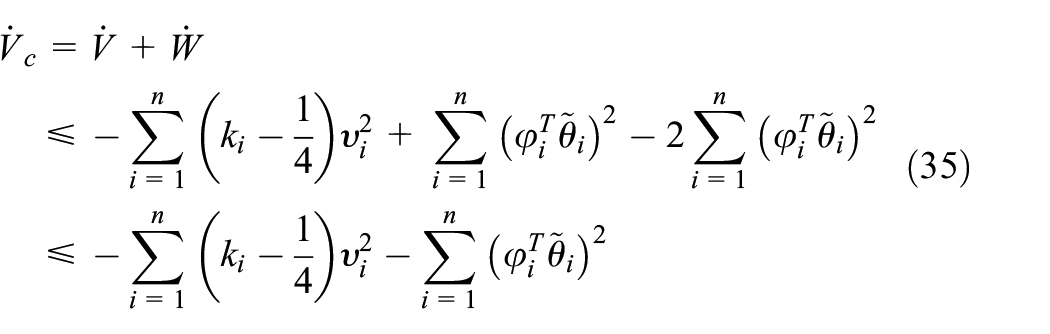
Based on equation (35), by choosing
The following Lyapunov function is established to guarantee the boundedness of

Taking the time derivative of

By using lemma 2 in (Dong et al., 2012; Li, 2019; Yu et al., 2018c), we have
where

▪ Projection-based adaptive laws
The estimation errors are defined as

The projection operator is given by

where “

Applying the projection algorithm, the standard adaptive laws (equation (4)) become

▪ σ-modification-based adaptive laws
The adaptive laws are achieved by fusing an I&I method and σ-modification technique to robustify the adaptive parameters (Soukkou et al., 2021; Yu et al., 2021). Modifying the adaptive laws (equation (4)) using the σ-modification technique results in
where

with
▪
▪
▪
Simulation and experimental results on the DC-DC buck converter system
In this section, the availability of the designed adaptive control method is demonstrated by a typical pulse width modulation (PWM) based DC-DC buck converter system. The DC-DC buck converter system comprises a DC input voltage source
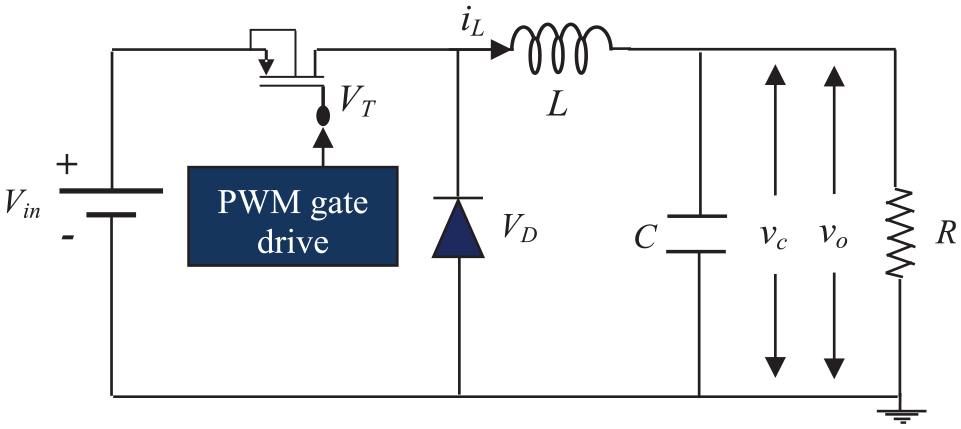
Schematic diagram on the DC-DC buck converter system.
To show the effectiveness of the proposed adaptive control method, simulation and experimental results on a DC-DC buck converter system are validated.
Simulation results
Considering the following state variables

where
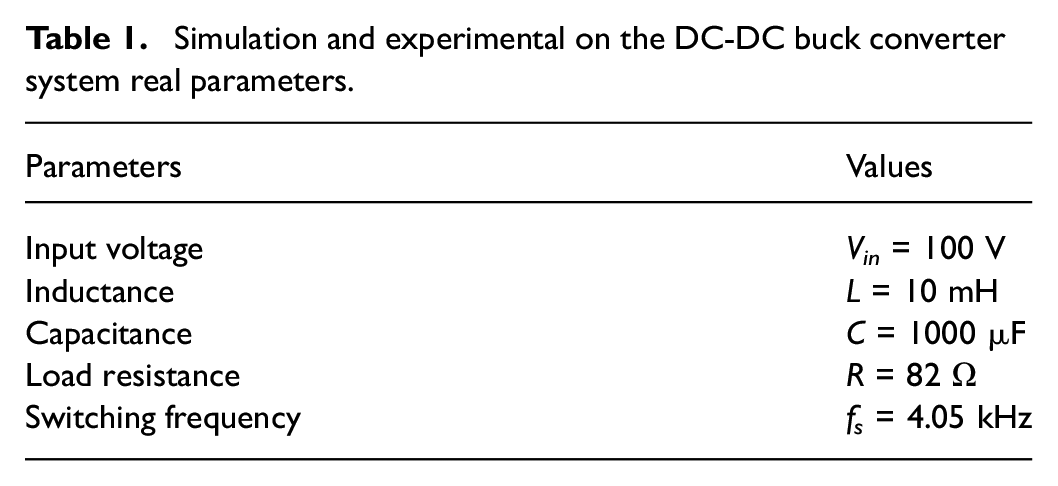
Simulation and experimental on the DC-DC buck converter system real parameters.
The signal


The adaptive laws for


where
The DC-DC buck converter system is studied for the following simulation cases:
▪
▪
The simulation results obtained by using the proposed adaptive control technique are compared against the simulation results of the conventional adaptive command filtered backstepping control method (CACFBC) proposed in (Dong et al., 2012) and the simulation results of the I&I ABC proposed in (Karagiannis and Astolfi, 2008). The simulation results of the DC-DC buck converter system with reference output voltage and reference output voltage change are shown in Figures 2–4, respectively.
▪
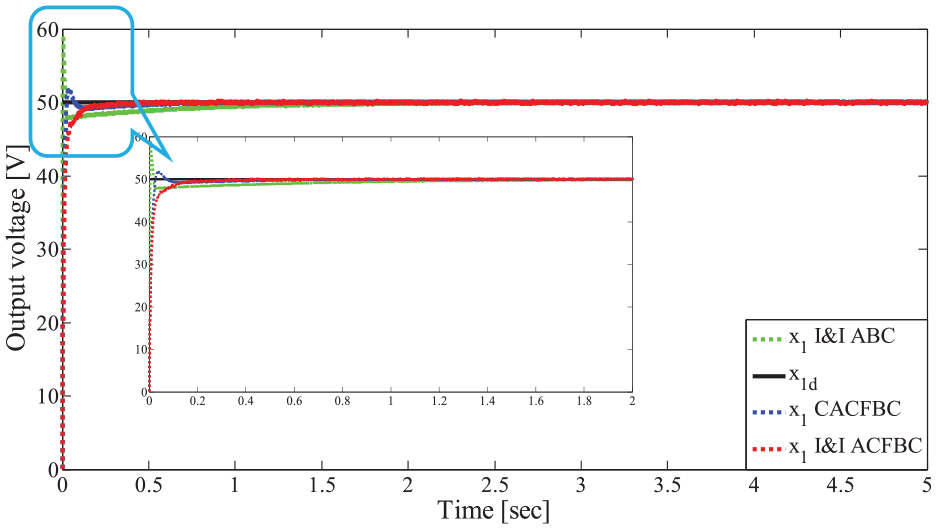
Output voltage.
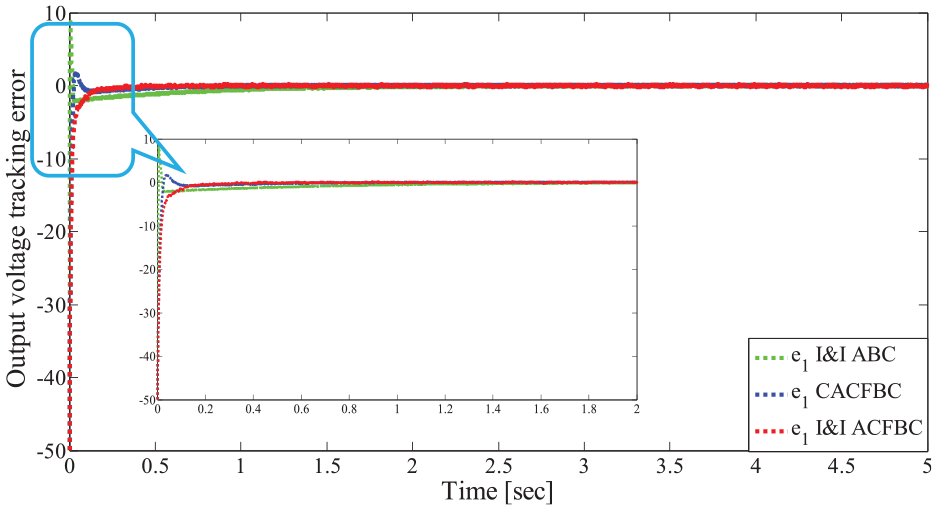
Output voltage tracking error.
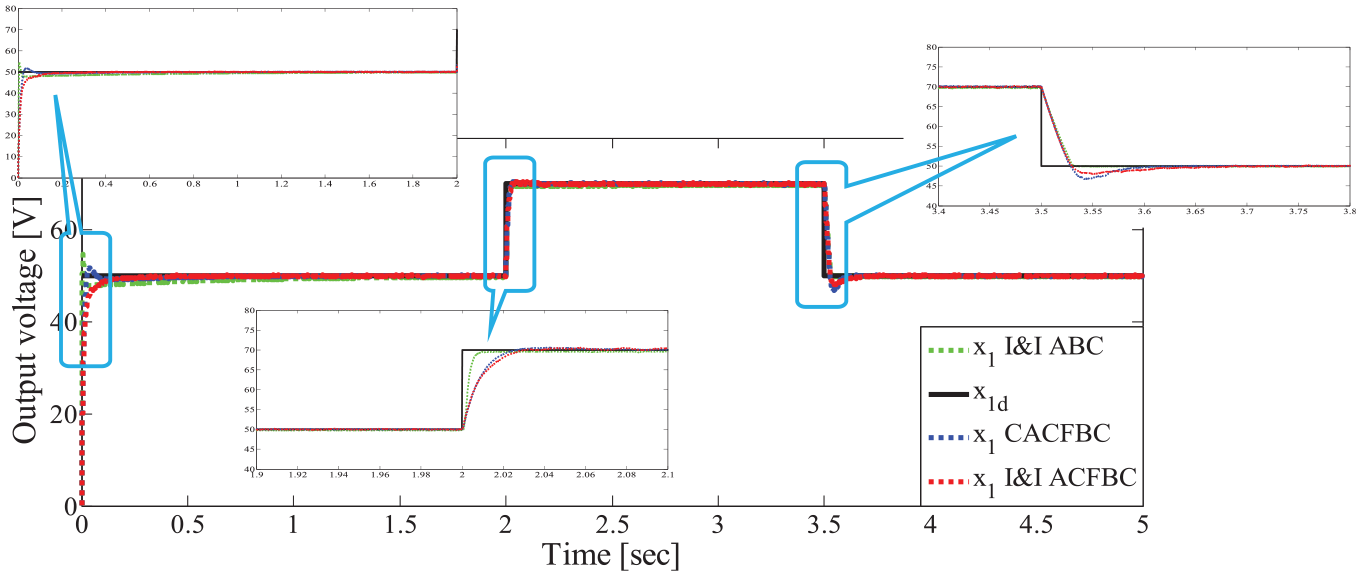
Output voltage.
The response curves of the output voltage and the output voltage tracking error under the above three adaptive control approaches (I&I ABC, CACFBC, and I&I ACFBC) are displayed in Figures 2 and 3.
The simulation results are shown by Figures 2 and 3. Figure 2 shows the responses of output voltage and the reference output voltage, from which it is observed that the tracking performance is achieved. Figure 3 indicates the response of output voltage tracking error, from which we can see that the tracking error converges to zero. It is observed from the result that the proposed adaptive control scheme has better control performance and higher tracking accuracy in our developed adaptive control scheme than the I&I ABC approach in (Karagiannis and Astolfi, 2008) and CACFBC approach in (Dong et al., 2012).
▪
The reference output voltage is tending to vary suddenly from
It can be seen from Figure 4 that the output voltage can track the reference output voltage. As shown by Figure 4, the proposed adaptive control approach further improves transient and static performance in the presence of reference output voltage variation compared with the I&I ABC and CACFBC methods.
Experimental results
To investigate the efficiency of the proposed adaptive control method, experiments for the DC-DC buck converter system are performed. The experimental test bench is depicted in Figure 5, which consists of a host PC with MATLAB/Simulink, DC-DC buck converter (SEMIKRON inverter, inductance, capacitance, and load resistance), interface card, current and voltage sensors, DC power source, dSPACE DS1103, and digital oscilloscope.
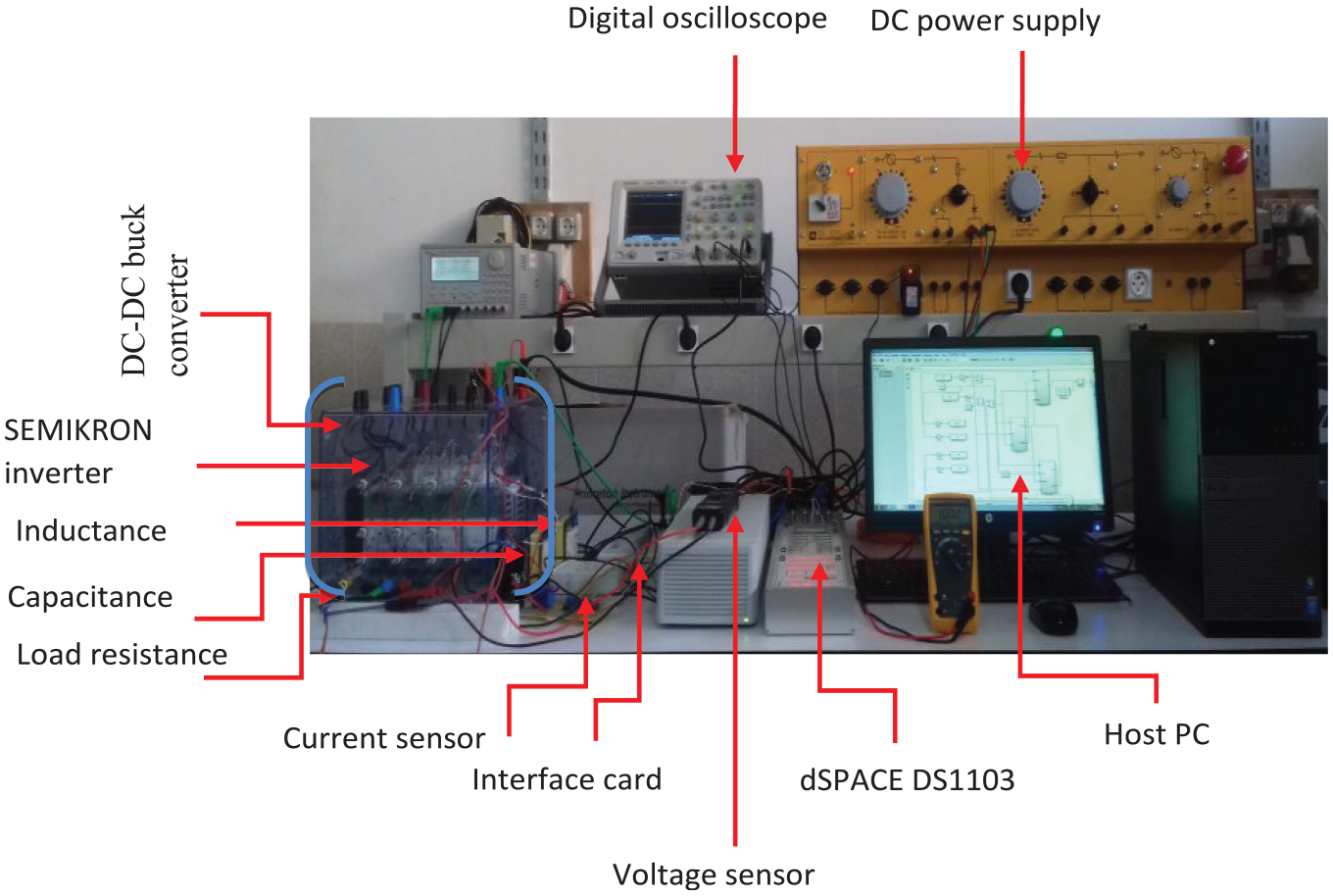
Experimental test setup on DC-DC buck converter system.
In the experimental tests, the validity of the proposed adaptive control method is constructed in the two cases via the following results compared with the CACFBC method. One case is for robustness against the load resistance variation and the other is concerned with the robustness against the reference output voltage variation. The experimental results of the DC-DC buck converter system with load resistance change and reference output voltage change are shown in Figures 6–8, respectively.
▪
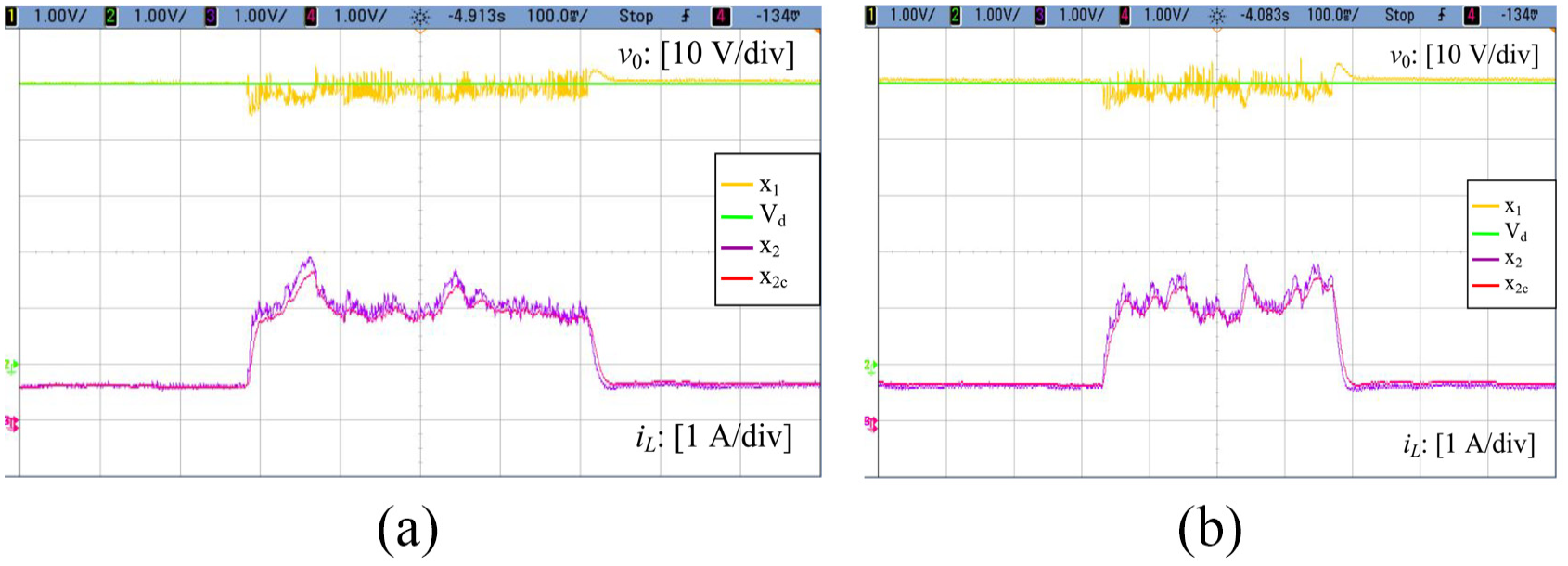
Experiment results for the output voltage and inductance current under different adaptive control algorithms and load resistance variation. (a) I&I ACFBC. (b) CACFBC.
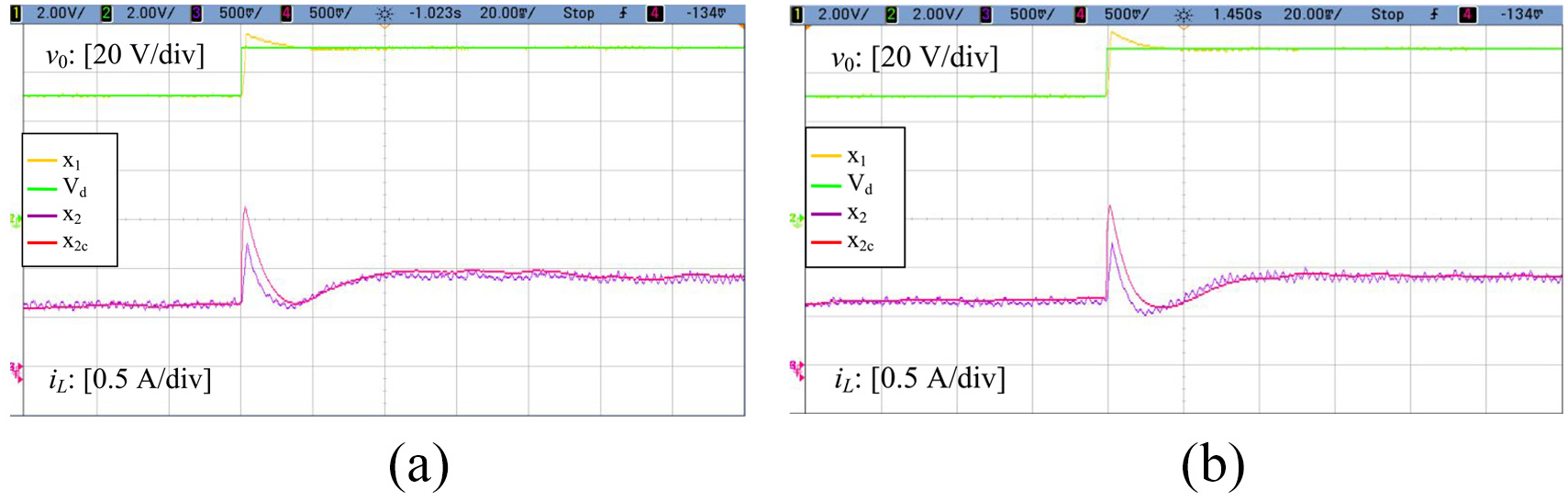
Experiment results for the output voltage and inductance current under different adaptive control algorithms and reference output voltage variation. (a) I&I ACFBC. (b) CACFBC.
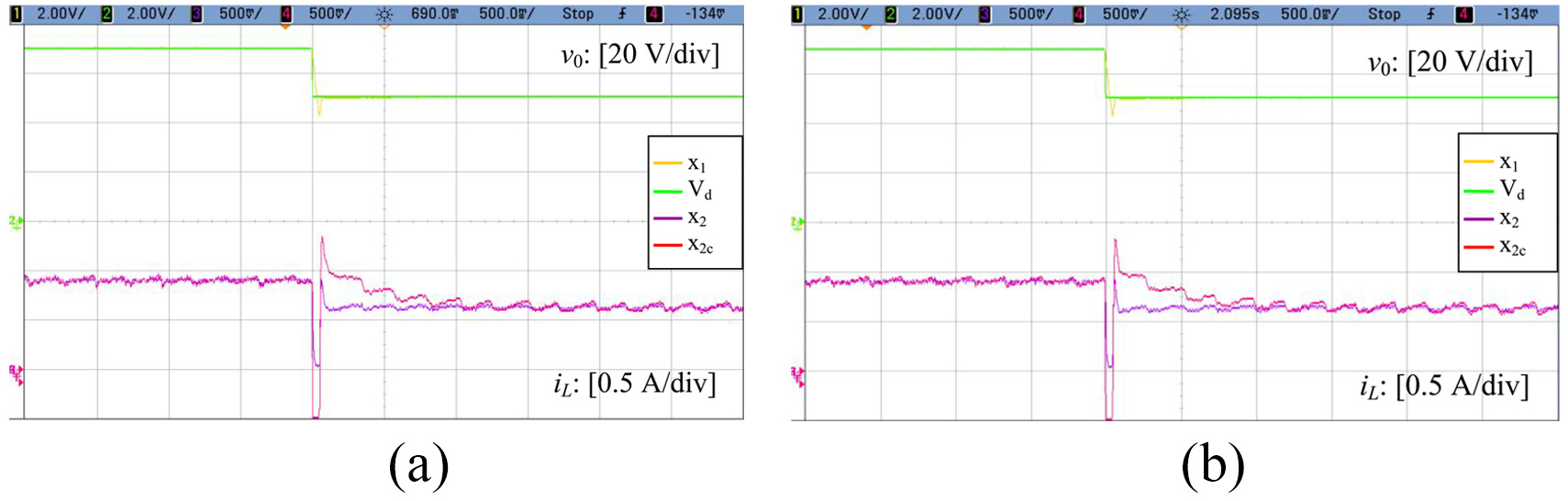
Experiment results for the output voltage and inductance current under different adaptive control algorithms and reference output voltage variation. (a) I&I ACFBC. (b) CACFBC.
In this case, the output voltage and inductance current are compared among the different adaptive control methods (I&I ACFBC and CACFBC) by changing suddenly the load resistance from
The experimental results of DC-DC buck converter system with load variation are plotted in Figure 6(a) and 6(b), respectively. The robustness against load resistance is demonstrated when the load resistance changes suddenly from
Figure 6(a) and 6(b) shows the experimental output voltage and inductance current when the load resistance drops from
▪
In this case, the load resistance is kept unchanged, and the reference output voltage is changed suddenly from
The experimental reference output voltage is set to change suddenly from
Figures 7(a), 7(b), 8(a), and 8(b) show the experimental output voltage and inductance current when the reference output voltage drops from
Figure 6(a) and 6(b) is the experimental output voltage and inductance current when the load resistance is changed from
Conclusion
In this paper, an I&I ACFBC strategy is proposed for a class of uncertain nonlinear systems in strict-feedback form. By adopting the proposed adaptive control technique, the problem of the explosion of complexity existing in the adaptive backstepping control procedure is solved. The parameter estimations are driven by an I&I approach. Moreover, according to the Lyapunov stability theory, it is proved that all the signals in the closed-loop system are bounded. Simulation and experimental results of the DC-DC buck converter system have been utilized to illustrate the efficiency of the proposed adaptive control scheme. In our future work, we will consider the I&I based adaptive finite time command filtered backstepping control design for a class of uncertain nonlinear systems in strict-feedback form.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.