
Abstract
In this paper, the concept of Obstacle Detection and Track Intrusion Detection (OD&TID) systems related to the operation of trains is introduced, along with a potential concept for such a system. The main focus of the work presented here is the identification and description of system requirements and Use Cases (UC), their detailed classification, including general UCs for mainline railway and UCs specific to freight, as well as an analysis of the UCs and of the method used. The identified UCs have been organised with respect to the mode of operation, Grade of Automation (GoA), and operating conditions. The UCs were further analysed in different UC scenarios, including the pre-conditions, system response, actions made by OD&TID and associated systems and the post use conditions of the scenarios. The priority for implementation and complexity of each UC are discussed with respect to the probability of scenario occurrence and required interfaces. This work has been carried out as part of the process to evaluate implementation constraints, risks and requirements, and the operational scenarios of the OD&TID developed within the EU-funded Shift2Rail project SMART2, which aims to design and develop a prototype OD&TID system.
Introduction
The development of automatic traffic management and operation in the context of railway transportation is a subject undergoing intensive study in both academia and industry. The main objectives of current ongoing research in railway traffic management systems (TMS) are to increase the capacity, efficiency and operational resilience of the railway network, and transition from infrastructure-based train control to automation of train operation. 1 , 2 Based on a review of recent papers, 3 , 4 the implementation of traffic management has benefited from the digitalization of entire railway control command, signalling system, and other data sources, including the data exchange of locations of trains, speed of trains, timeliness of services, timetables, routes (start, end and calling points) weather condition, passenger information, etc. These data can be processed by computational traffic management entities with a speed far in excess of the capabilities of a human, and a larger more disparate set of data sources can be considered within the required decision making period, therefore, potentially enabling optimal decision making. 5 , 6 Furthermore, the possibility to combine digitised TMS with Automatic Train Operation (ATO) is expected to enable optimisation of train moving trajectory for speed, capacity, or energy efficiency, or obtaining the best compromise of all three. In the content of railway TMS, the Grade of Automation (GoA) of train operation and ATO implementation is graded into five levels which are shown in Table 1.
Main characteristics of the five Grades of Automation (GoA).

To cope with accelerated growth in passenger and freight transport in European countries, the European Rail Agency (ERA) is looking to upgrade the level of automation of the railway system from GoA1/2 to GoA3/4. 7 To safely operate trains under automated control as in GoA2-4 shown in Table 1, the train or train control system should be able to detect hazards in its surrounding environment. Currently, it is the driver who has the main role in detecting hazards, and developing intelligent systems to automate this detection role, is a challenge, and necessary, for upgrading to ATO on mainline railways. 8 As a result, there are strong drivers for the development of OD&TID systems for railway operations, which are vital for the high grade of automation capable next generation TMS. 9 , 10 With regard to GoA, the Object Detection (OD) system being developed in the SMART2 project is not specifically targeted at a single GoA, it could be used to supplement driver observation of hazards, or as an automatic hazard detection system for ATO. This paper discusses the UCs for OD&TID systems for railway applications in general, and the SMART2 system concept in particular; the GoA used in the operation of trains is a specific characteristic of those UCs.
A field of development for OD systems with some similarities to railway applications is in systems for road vehicles, in which case the sensor and computer vision technologies 11 of the obstacle detection systems of road vehicles can provide the vehicle with functionalities such as lane departure warning, 12 collision warning, 13 adaptive curse control, 14 object detection, etc. to assist the driver, or for autonomous driving. The key technologies of obstacle detection for road vehicles include sensors such as laser scanner, radar, stereo cameras, etc with algorithms to process the detected data. As for rail applications, up to now, OD systems are commonly used in modern metro and tram system (e.g., Copenhagen metro, subway line 1 in Paris, subway in Nuremberg, etc.) for detecting objects on the tracks in problematic areas like urban zones where the track is exposed to open air, level crossings, stations, and even on tracks along which automated or driverless trains pass; an important distinction is that these examples are closed, local or single region, networks rather than an open national mixed traffic network. For mainline railways, obstacle detection systems are sometimes applied at level crossings, example of typical applications including the iron ore delivery line in Pilbara, Australia, those on the Italian and Taiwan high speed rail network, etc. Though there have been a few successful applications for obstacle detection in railway applications, these obstacle detection devices are mainly mounted at specific locations on the trackside, such as at railway level crossings, bridges, tunnels, etc. without an integrated approach to cover all potential hazards and hazardous locations for mainline railway operation. The key differences between road and rail applications of OD systems, and hence the challenges for the development and implementation of comprehensive object OD for railway applications are: firstly, in the railway operational environment separation of vehicles is usually managed by the signalling system and hazards are generally fewer and occur less frequently than in the road transportation, so, initially, the demand of obstacle detection system for railways was not as high as for roads. Secondly, the breaking distances of trains is usually much higher than that of road vehicles, due to higher speed, greater mass, lower adhesion at the wheel, or a combination of these factors, so the distance and area ahead of a train at which to detect an obstacle and be able to react in time is much greater than for road traffic, which makes the development of applicable detection technologies more challenging. Thirdly, the implementation of OD systems in rail applications usually requires the operating systems and infrastructure of a line to be upgraded together, which requires significant time and incurs significant costs.
In the context of the SMART2 project, the key functionality of an OD system is to detect static and dynamic objects which are potentially harmful to the trains which are being operated, 15 and, additionally, certain categories of objects that could be harmed by the train (such as persons on the track). There are two main categories of sensors for OD, i.e., passive and active sensors. Passive sensors can detect and respond to inputs from physical environment, and active sensors use their own energy sources, such as radar that emits energy and detects the return of that energy from the surroundings. 16 Obstacle detecting via stereo cameras is a common approach in railway applications, such as the obstacle detection in platform area, 17 level crossing, 18 track surface, 19 etc. However, stereo cameras have their limitations due to large errors resulting from the stereo calibration problem. 20 As a result, significant effort has been invested into the use of monocular cameras and advanced machine learning processing algorithm to enable a more capable and accurate obstacle detection system. 20 Active sensors, such as radar, laser scanner and sonar have potential uses in railway OD systems, and have been used to some extent in some prototype and trial systems. With active sensors, the distance to an obstacle is determined by measuring the time interval between the emission of the illuminating energy and receiving the reflected energy, and using this time (the ‘time of flight’) of the energy, as well as the analysis of the properties of the received signal, to calculate the distance. Currently, in different types of transport application there are diverse OD system solutions according to the diverse conditions and requirements in these different applications, and the majority of OD systems use fusion of data from multiple active and passive sensors to increase the overall performances of the system. 16
The function of Track Intrusion Detection (TID) for railways is to detect static or/and dynamic objects that intrude into the trackside environment, in order to enable preventative action to be taken to avoid collisions with objects that are potentially hazardous to the train, or objects which it is desirable, or required, to minimise the hazard posed to them by train operations. 21 In general, the TID is a continuous process, however, the level of hazard varies across a railway network and providing detection coverage to detect all hazards across a whole railway network would require significant resources. Therefore, current TID systems are usually installed on mainline railway networks at critical sections of railway infrastructure such as stations, tunnels, bridges, level crossings, etc., where there is a higher risk of incidents, and it is hard for the driver to detect and react. One common application of TID system is in station areas of automatic urban guided transport systems (metros, trams, etc), where there are systems which detect objects, especially passengers which intrude from public areas into the path of the train. However, because most urban guided transports are usually operated in tunnels or on elevated lines where the operational environment is comparatively simpler than mainline railway networks, and potential access to the trackside is physically restricted, the TID systems are only required in station platforms.
To improve safety and enable the operation of mainline railways to reach GoA3/4, the Shift2Rail SMART2 project is developing a holistic OD&TID system to detect harmful objects in real-time up to 2000 m ahead of a train, using fusion of detection data from multiple sources, including the sensor on the front of the train. The analysis of requirements and Use Cases (UCs) presented in the following sections was carried out as part of this project. The project considered the research output from previous Shift2Rail projects, ASTRail, SMART and ARCC.
OD&TID system concept
The review of types of sensor in the previous section indicates that an OD&TID system for railway applications would need to rely on the fusion of data from multiple sensors and sensor types. Therefore, some consideration needs to be given to the architecture of the OD&TID system, specifically the interfaces and interactions between the sensor and processing sub-systems, and TMS. In the SMART2 concept (Figure 1), 22 the OD&TID comprises three types of detection sub-systems: on-board, trackside and airborne, although it can be envisaged that most of the practically useful sensor sub-systems would fall into the same three general categories. All three sub-systems are organised with multiple sensors and will be integrated into a holistic OD&TID system with interfaces to a central Decision Support System (DSS) which will manage the OD&TID system according to the different operational and environmental conditions and potential hazards, and interface with the TMS. In terms of architecture, there would be equivalent interface requirements for any OD&TID system; however, these might differ from system to system.
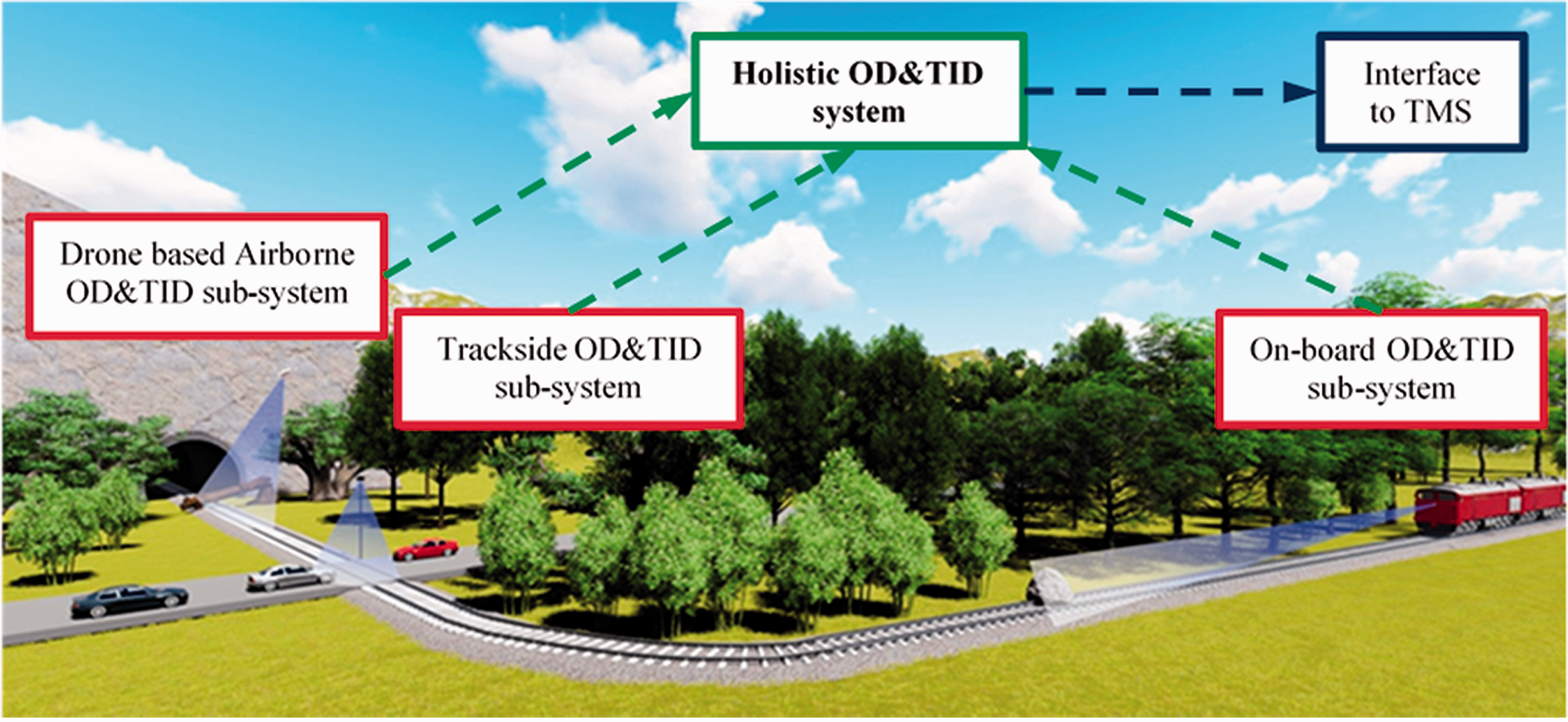
Overview of SMART2 OD&TID system concept.
The OD&TID system would detect various situations in front of the train and feed the data generated by the sensor group to DSS. The data includes areas behind a curve, slope tunnels in front of the train, as well as all obstacles on long straight tracks ahead. In the following sub-sections, the main functional requirements of each type of sub-system are outlined.
An important issue to be considered for the development of OD&TID system as a whole, and its sub-systems, is the impact of the performance and reliability of the system on the safe operation of trains, specifically the Safety Integrity Level (SIL) of the system. Since the OD&TID system would have a safety critical role, it is expected that the operational functions of the system and interactions with other safety critical systems would be required to reach the SIL4 level. In terms of the reliability and accuracy of the detection process, further consideration would need to be given based on what is achievable and what is currently acceptable.
On-board OD&TID system
The on-board OD&TID subsystem could include a multi-sensory system mounted on the leading vehicle of the train. Starting from previous Shift2Rail project SMART,
16
the key functional requirements for on-board OD&TID sub-system of the new concept are summarised below: Frontal obstacle detection: detect and identify non-infrastructure objects/obstacles ahead of the train. Robustness: the system should be resistant to environmental stresses. Detection range: detect and identify obstacles up to 2000m ahead. Detect the rail tracks ahead of the train accurately, to define region of interest. Detect the distance between vehicles, either for obstacle detection or coupling (optional additional functionality). Sensor fusion: integrate different sensors to minimise uncertainties is obstacle detection. Transmit the detection data to central or local systems for decision making and response implementation. Communicate the sensor data to be visualised on Human-Machine Interface (HMI). Display live image detected from the selected vision sensor with the hazard obstacles highlighted and the distance to them. Capable of classifying the objects belonging to different classes, (e.g. people, vehicles, and some types of animals). Provide object detection in all weather and lighting conditions.
Trackside OD&TID subsystem
The main functionality of trackside OD&TID sub-system is to detect dynamic obstacles such as humans, road vehicles, wild animals, and environmental obstacles (fallen trees, rocks, landslide etc.) within the designated detection area for that sub-system; this could be a general section of plain track or an area with specific hazards such as stations, level crossings, yards, tunnels, etc. where the risk of incidents is highest.
23
The main functional requirements for trackside OD&TID are summarised below: Detect of intrusion of human or/and animals near the track, including at stations, level crossings, etc. and detection of staff and trespassers. Detection of railway vehicles (derailment form adjacent tracks, run-away or unauthorised movement). Detection of unauthorised intrusion of motor vehicles and bicycles, particularly at level crossings, but also intrusions due to adjacent road traffic accident or maintenance vehicles. Provide detection data and real-time image of monitoring area through interfaces to decision making systems and HMI for operators (including classification of information). Detection capabilities should not be significantly degraded by environmental lighting and weather conditions.
In the SMART2 concept, the trackside OD&TID sub-system, will be an advanced 3D laser optic subsystem, intended to provide detection coverage at level crossing. Within the SMART2 architecture or other OD&TID system, the trackside OD&TID sub-system could use a static and directable camera ‘watch towel’ or ‘sentry’ which monitors its local (larger area than laser system) areas using vision-based optical components and detection algorithm.
The locations of the trackside OD&TID system should be decided based on studies of a railway route, considering the overall coverage required, factors which hinder the detection capabilities of other sub-systems, an analysis of the potential hazards, the level of acceptable risk, the level of automation and the resources available.
Airborne OD&TID subsystem
An airborne OD&TID sub-system would be expected to mainly consist of a drone fleet that would be dispatched to monitor areas of the railway infrastructure. In general, such a drone fleet should be a flexible OD&TID asset. The drone flight could be either based on a regular patrol schedule, coordinated with the operation of trains to provide the required level of detection coverage, in response to detections by other sub-systems and to specific inputs (such as incidents or increased risk of environmental hazards), or based on operator inputs. Various types of sensors could be used on the drone, including also automated analysis of the sensor results (processing of the sensor data could also take place at local trackside processing components of the airborne sub-system rather than on the drone itself). The sensors could also be utilised when the drone is docked for charging, particularly if the charging station is place at a trackside location providing good fields of view. The functional requirements of the airborne OD&TID would depend on the types of sensors it is equipped with, and the scope and criticality of the role of the airborne sub-system within the OD&TID system. In general, it would need to detect similar objects and potential hazards in the railway environment as the on-board and trackside sub-systems, have automated and directed flight capabilities, and send real-time processed detection data (and possibly live video) through interfaces to where the detection data is required.
Use cases for OD&TID systems
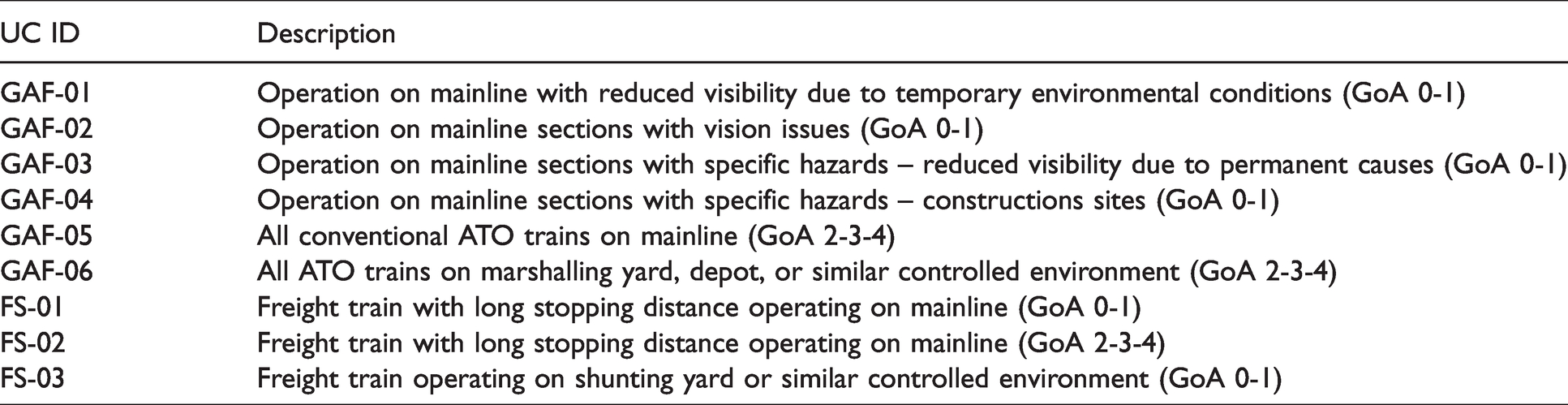
The main purpose of analysis and definition of UCs is to better understand the role of a novel OD&TID system in the entire TMS. Therefore, the UCs for OD&TID systems have been identified, analysed and Railway operation type that the UC relates to, which determines two categories: (1) UCs relating to general railway traffic (passengers and freight), which apply to freight operations, referred to as General Applicable to Freight (GAF); and (2) UCs that are specific just to freight operations, referred to as Freight Specific (FS); The grade of automation (GoA), which determines two major categories: (1) UCs with GoA 0-1 scenarios, mostly driver-controlled; (2) UCs with GoA 2-3-4, involving Semi-Automatic Train Operation (SATO) and Automatic Train Operation (ATO).
The UCs were identified and classified as shown in Table 2:
Classification and description of UCs.
Analysis approach
Following identification and classification, the UCs were analysed in detail with respect to the following features and aspects:
With features and aspects listed above determined for each UC, the UCs were assessed with respect to a number of different key aspects related to the technological development of OD&TID systems for each specific UC and assigned a level according to three main aspects: Overall priority/importance of implementing different UCs Estimation of complexity of OD&TID system for different UCs Likelihood of implementation in the future
In addition, the relevance of the UC specifically to the SMART2 OD&TID system concept was also assessed. The assigned levels and outline details of the assessment with respect to the three main aspects of technology development are presented in the following sub-sections.
Analysis results
Overall priority/importance of implementing different UCs
The output of OD&TID system is expected to be compulsory for some on-board or trackside systems responsible for the operation of trains, and is expected to be advisable, or a beneficial safety enhancement for others, depending on the UC. In each UC, the importance of the role of the proposed OD&TID system had been classified into different levels due to its frequency of usage with respect to the operation of trains, the potential risks to the train or others in the railway environment, and the impact of the system on those risks and the operating efficiency (i.e., GoA). The priority/importance of implementing the OD&TID system in each UC is summarised in Table 3. The priority/importance assigned to each UC was assessed based on the frequency and risks in terms of the frequency of use, the frequency of a potentially hazardous event, and the potentially consequences of a hazardous event. For example, the priority for GAF-05 was assessed as “Very high” since the OD&TID would be in continuous use, as the primary system checking for hazards; however, the chances of a hazardous situation occurring (frequency of incidents) are relatively low, although the potential consequences of a hazard are very severe, as any hazard which could result in the derailment of a train running at line speed has the potential for multiple fatalities. Similarly, in this UC, the chances of there being a track maintenance worker ahead of the train at any specific moment are moderate to low, but higher than a potential derailment hazard, and any collision would most likely be fatal to that trackworker. In UC GAF-06, which was classified as “High”, the frequency of use of the system is also continuous, and the chances of a potentially hazardous incident are high, due to the presence of multiple items of rolling stock and staff at the trackside; however, the likely potential consequences are lower due to the lack of passengers and the lower speed. UC FS-03 was assessed as “Low” as, although the frequency and risks are similar to UC GAF-06, since there is a driver present, the expected impact of the system on those risks (and the commercial incentive) would be low in this UC.
Estimated overall priority/importance of implementing different UCs.
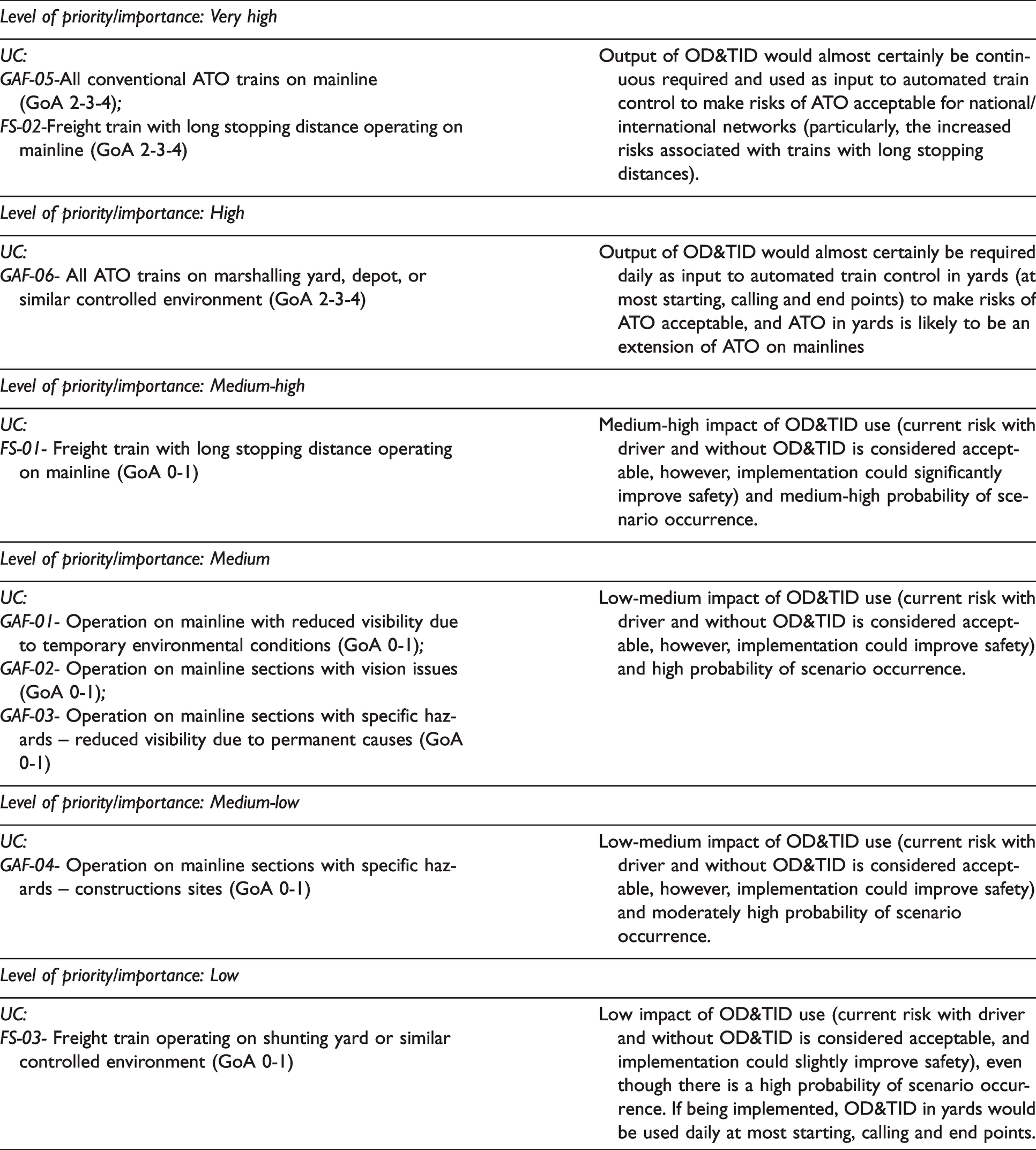
In summary, the importance of implementation of the OD&TID system with trains operated under GoA 2-4 levels have generally been classified higher than that of trains operated under GoA 0-1, with UCs where the train has long stopping distances also being classified as high. The key reasons for this are that, in the first instance, for GoA 2-4 the system would be the primary system for detecting hazards, and enable labour savings by removing the necessity for, or de-skilling the role of the driver, and, in the second instance, the potential impact of the system on reducing risks by giving advanced warning of hazards is high.
Estimation of complexity of OD&TID system for different UCs
The UCs for OD&TID system are primarily identified with respect to different GoA levels and further identified with train operation scenarios. The OD&TID system should have sufficient interfaces with the other systems involved in operating the trains in that UC, such as ETCS, TMS, ATP, and ATO systems, and would require integration with those systems. The complexity of the OD&TID system, and the complexity of integrating it with the other systems and procedures involved in operating the trains varies between UCs. The development of the OD&TID system also needs to consider the difficulties of applying appropriate sensors and their supporting software. Also, in general, the greater the complexity, the more difficult it is to ensure that the implemented UC would achieve the necessary level of SIL to be accepted. Therefore, the complexity of potential OD&TID system concepts that may be developed for each UC has been estimated and is summarised in Table 4
Estimated complexity of OD&TID system for different UCs.
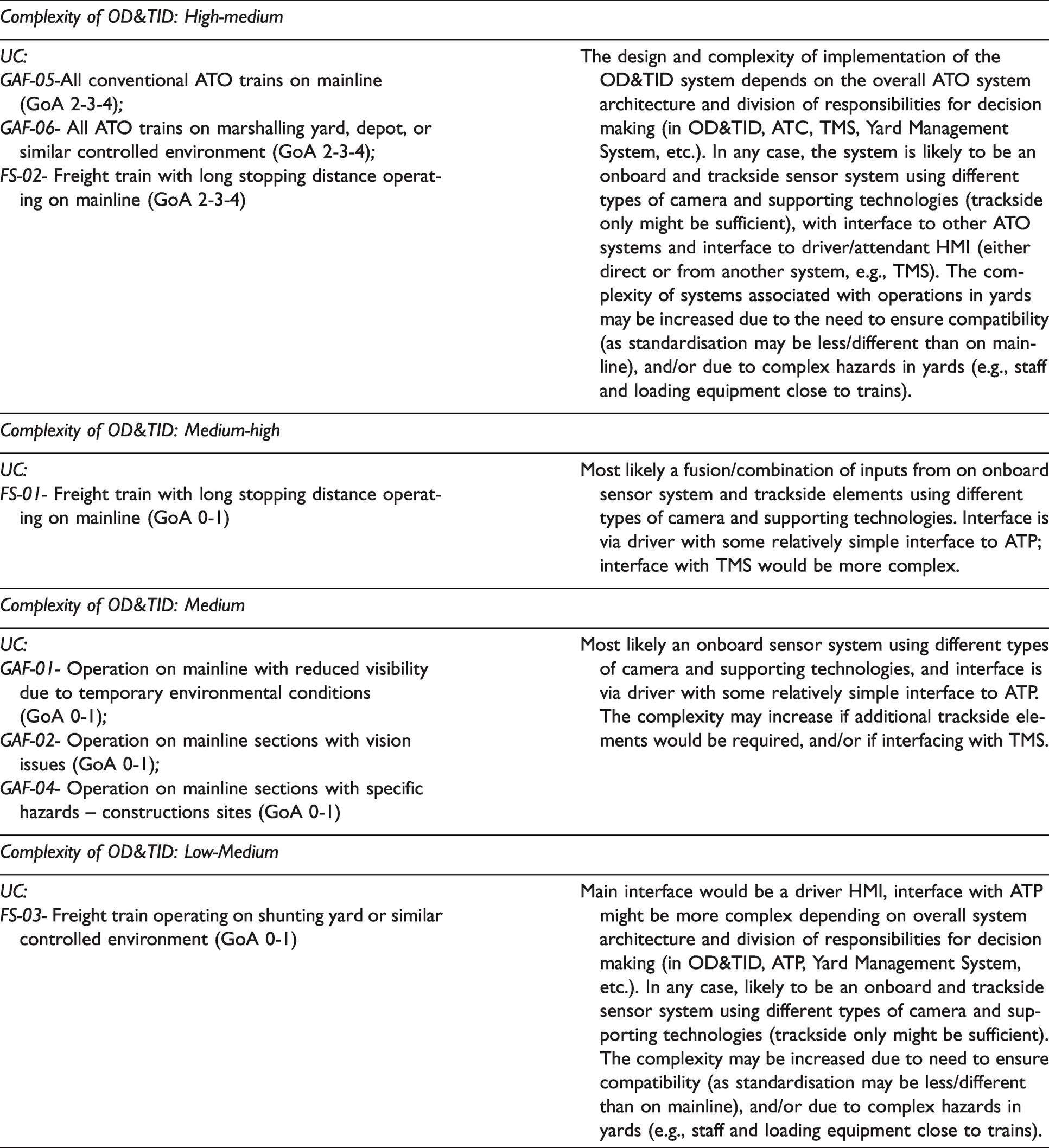
The complexity of implementing the OD&TID system to trains under GoA2-4 systems is higher than that for GoA0-1 because the architecture and functionalities of ATO with GoA 2-4 are relatively complex and the OD&TID system might need a greater range of sensor types and a greater density of sensor deployment to increase the levels of detection coverage up to those necessary to completely replace driver observation of hazards. This would include the need for more complicated interfaces with other operating systems (train control, TMS, yard management system, etc.) requiring larger bandwidth, and more infrastructure, etc. In contrast, the implementation of OD&TID system to train under GoA0-1 is potentially simpler, since the human driver still plays critical role in train operation in these UCs, the operation of the train is less dependent on the OD&TID for detection, and the degree of integration with other systems is lower (the minimum being interfaces with the driver, with increasing complexity with additional interfaces with ATP when operating under GoA1).
Likelihood of implementation in the future
The likelihood of future implementation was evaluated considering the system’s characteristics, the bottlenecks related to the development gap between the current and required technologies, interface constraints, and system requirements. Furthermore, the possibility of commercialisation and exploitation in near future was assessed. The conclusion regarding technical feasibility is generally similar for all UCs, i.e., it is feasible to resolve the constraints to implementation of OD&TID systems; however, the commercialisation and exploitation depends on different factors that are specific for each UC (e.g., timescale for ATO implementation by Infrastructure Managers and Railway Undertakings, development of standards for ATO under ERTMS/ETCS, etc.).
The complexity for the GoA 0-1 UCs is generally lower than the equivalent GoA 2-4 UCs, since the driver is present as a backup and fewer interfaces with other systems might be required, therefore, it could be considered more likely that implementation would occur in the future and the timescales for implementation might be shorter for GoA 0-1 UCs. However, the benefits and relative necessity of the OD&TID system is lower in these UCs, so the incentives and business case for implementation might be lower. Considering the overall priorities of national and international rail networks, it is foreseen that implementation of ATO, which is expected to include some form of OD&TID system, would be of a higher priority than implementation of an OD&TID only as a driver assistance system for GoA 0-1 operation. Therefore, it is plausible that, although the implementation of an OD&TID system for GoA 0-1 UCs is less complex, the increased incentives and drivers for implementation of a OD&TID system as part of an ATO system would, along with the general drive towards implementation of ATO, would make it possible that the implementation of the OD&TID systems for GoA 2-4 UCs is the more likely scenario, despite the increased complexity.
The other main distinguishing factor between the UCs with regard the likelihood of implementation, besides GoA, is the distinction between mainline and yard operations. It is expected that both ATO and OD&TID systems would be implemented for mainline operations before being implemented for yard operations, due to the greater expected benefits, in terms of increased capacity and reduction of risks and the potentially greater consequences of collisions in the mainline operating environment.
The UCs related to the operation of long freight trains are unlikely to be implemented as a standalone UC, just for the operation of long freight trains. Therefore, their effect on the likelihood of implementation of OD&TID systems is to marginally increase the incentive for implementation of OD&TID for the other general and freight specific UCs, with the long freight train UC as an extension of the general UC (which might affect the specification of the OD&TID system, to cover all UCs). This is due to the increase in the obtained benefits from the implementation of the OD&TID in these UCs, in terms of reduction of risk, due to the particular characteristics and hazards of operating long freight trains.
In summary, the implementation of an OD&TID system is possible and is a potential enabler of increasing the GoA of railway operations, therefore, it is very likely that technical, operational, standardisation and organisational/political constraints should be resolved by the different actors and stakeholders in the near future, to enable commercialisation and exploitation of OD&TID systems.
Conclusions
The subject of potential sensor technologies and system architectures for OD&TID systems to support railway operations has been introduced, with the outline architecture of the Shift2Rail SMART2 project presented as an example. This background has been used to identify some basic functional requirements and identify and analyse UC for OD&TID systems. UCs were identified and categorised based on operating conditions, their applicability to operating all types of train or specifically freight trains and the GoA involved in the operations. The UCs for OD&TID system have been analysed and assessed with respect to the priority/importance, complexity, and likelihood of implementation. Analysis of the relative importance and priorities for implementing the UCs showed that the use of OD&TID systems to support the introduction of ATO is likely to be the most significant factor in determining the priority for implementation due to the potential for savings in labour costs, and reduction in safety risks, which was also considered a significant factor. Analysis of the complexity of the development and implementation process indicates that all UCs are considered technically feasible to implement and that complexity of implementation is expected to increase with increasing levels of automation and reduction in driver involvement. Analysis of the expected likelihood of implementation of OD&TID systems showed that the UCs that involve a higher degree of automation would have the highest likelihood of implementation, due to the implementation of OD&TID systems being an enabler of ATO on mainline mixed traffic railways, since it is expected that the potential benefits achievable with ATO, would outweigh the drawbacks related to the complexity of implementation. The potential net benefits of OD&TID systems supporting driver operation are less clear.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research received funding from the Shift2Rail Joint Undertaking under the European Union’s Horizon 2020 research and innovation programme under Grant Agreement No 881784.