
Abstract
Dynamic facility layout problems involve devising the optimal layout for each different production period. This article studies unequal-area dynamic facility layout problems under fuzzy random environment to minimize the sum of the material handling costs and rearrangement costs. For a more general situation, a novel model of unequal-area dynamic facility layout problems is proposed on the basis of fuzzy random theory, in which uncertain demands are characterized by fuzzy random variables. Unequal-area dynamic facility layout problems are one of the non-deterministic polynomial-time hard problems. Therefore, a hybrid particle swarm optimization and simulated annealing algorithm is innovated to solve the proposed unequal-area dynamic facility layout problems model under fuzzy random environment, in which the shapes and areas of facilities are changed dynamically. Two facility-swapping methods and two local search methods help hybrid algorithm escape from local optima, allowing a more reliable solution. Moreover, a new shifting method is developed to prevent the spatial overlapping between adjacent facilities and save material handling costs. The performance of the hybrid algorithm is confirmed by some test problems available. Finally, the proposed method is extended to a facility layout planning of a new aircraft assembly shop floor. Computational results show that the efficiency and effectiveness of the proposed method, in sharp comparison with other approaches.
Keywords
Introduction
Facility layout greatly influences the production system in terms of material handling costs, lead time, and work-in-process (WIP) inventory. 1 It is a long-standing research topic involving the physical arrangements of a number of non-overlapping facilities including workstations, machines, and utilities. 2 Material handling costs are one of the most crucial factors to measure the rationality of a layout since they account for 20%–50% of the overall operating costs and 15%–70% of the total manufacturing costs. 3 A rational facility can significantly improve the overall productivity and production efficiency and can reduce production cycles. 4 In turn, a poor facility layout may cause the accumulation of the WIP inventory, overloading of the material handling system, and longer queues. 5
Dynamic facility layout problems (DFLPs) are modeled by discretizing the time horizon into the multi-planning periods. The planning horizon can be defined in weeks, months, or years. 6 DFLPs, under uncertain environment, are caused by the elusive market fluctuation and changes in the product during each period. Exact approximation of certain product demand is difficult and, in some cases, impossible for such reasons as measurement errors and forecasting methods. 4 Essentially, demand requirements cannot be determined in advance due to the rapid changes in the market. Therefore, some researchers have considered facility layout problems (FLPs) as uncertain and imprecise nature of demand including fuzziness or randomness. Fuzzy logic has been used to cope with this imprecision within a certain range. Moreover, as to the fact that product demands fluctuate with process adjustment and quality tracing, probability theory has been introduced to deal with this kind of uncertainty. However, it is usually difficult to know precisely whether the demand requirements are fuzzy or random. This article applies fuzzy random variables (FRVs) to describe the two-fold uncertainty of demand for dealing with DFLPs. In addition, previous researches have focused on DFLPs with equal sizes and fixed orientations of facilities. The assumption that each facility has been assigned with the same size area and invariable shape is unreasonable in practical application and deduce the area utilization ratio. Therefore, this article focuses on unequal-area (UA) DFLPs under a fuzzy random environment where the unfixed shapes and free orientations of facilities are considered.
Due to the fact that FLPs are classified in non-deterministic polynomial-time (NP)-hard problems and combinatorial optimization problems, exact approaches (dynamic programming (DP), branch and bound method, cutting plane algorithm, etc.) cannot solve them because the computational time increases exponentially with the problem scale. Therefore, the heuristic and metaheuristic approaches are superior alternatives to exact approaches for solving FLPs, which satisfies certain constraints and provides sub-optimal solutions within a reasonable computational time. 7 It is vital to select a strong metaheuristic algorithm for finding a rational layout in an efficient manner. 8 Particle swarm optimization (PSO) has shown strong performance compared with other competing algorithms 9 owing to the simple implementation, few parameters setting, and effective global search. 10 However, PSO is prone to get stuck in local optimum when applied to the complex and combinatorial optimization problem. The exploration (global search across the entire search domain) and exploitation (local search) of PSO should be enhanced and balanced to obtain a better solution. In contrast to PSO, the simulated annealing (SA) algorithm is a stochastic searching method and has a mechanism to jump out of local minima. Therefore, a novel PSO and SA algorithm are proposed to solve UA DFLPs under fuzzy random demand, where the shapes and areas of facilities are unfixed. The proposed hybrid algorithm combines SA into the cycles of PSO that dynamically improve the global best-found solution in each PSO iteration. Moreover, two swapping methods, two local search methods, and a shifting method are used to improve the solution quality in each PSO iteration. The results show that the proposed hybrid algorithm can be effectively used for solving DFLPs under fuzzy random environment.
The general structure of this article is as follows: a literature review of UA DFLPs is introduced in section “Literature review.” Section “Problem formulation” presents dealing with FRVs and the objective function of UA DFLPs under total material handling costs minimization. In section “The proposed hybrid PSO and SA algorithm,” the proposed hybrid algorithm with PSO and SA is developed for solving UA DFLPs. In section “Performance evaluation,” the performance of the proposed algorithm is evaluated by some test problems. In section “Case study,” numerical experiments are implemented and computational results are discussed. The conclusions are demonstrated in section “Conclusion.”
Literature review
In previous studies, many researchers focused on the changes of material demands from period to period under deterministic environment.11,12 With fuzzy production information and the uncertain results from the changes in product volume and varieties, material demands may change during each period. Therefore, some researchers paid attention to the non-deterministic nature of demands in DFLPs. The approaches for uncertain DFLPs can be categorized into two groups of probabilistic and fuzzy approaches. 6 For example, material demands between facilities are assumed as stochastic variables following the normal distribution, which could be predicted on the basis of historical information relating to the product.6,13 Aiello et al. 14 assumed the uncertainty of material demands between facilities for each period as fuzzy numbers. Kaveh et al. 15 defined product demands (i.e. material demands) as fuzzy numbers and modeled in fuzzy programming. Decision-making process for the DFLPs often takes places in a hybrid uncertain environment, so it is difficult to know precisely whether the demand is fuzzy or random. Thus, FRVs are applied to describe hybrid uncertain demand. The concepts of FRVs were initially introduced to describe fuzzy random phenomenon simultaneously by Kwakernaak. 16 Afterwards, FRVs have expanded its application in many fields, such as resource allocation, 17 supply chain management, 18 inventory control, 19 and production planning. 20 These studies have shown the effectiveness of FRVs in dealing with dual uncertain demand where fuzziness and randomness co-exist. Therefore, this article applies FRVs to deal with the two-fold uncertainty for material demands.
Various mathematical models, exact algorithms, and heuristic or metaheuristic methods have been developed in the past three decades. Rosenblatt 21 used DP and computerized relative allocation of facilities technique (CRAFT) to solve equal-sized DFLPs. Lacksonen and Emoryenscorejr 22 concluded that the cutting plane algorithm has better performance than CRAFT and proposed a DP algorithm for solving the DFLPs with the quadratic assignment problem (QAP) model. The exact approaches mentioned previously are effective approaches to obtain a satisfactory solution with small-sized DFLPs, but the subsequent intelligent algorithms are more suitable for solving large-sized DFLPs with high and low flow dominance, respectively. 23 Baykasoğlu and Gindy 24 used an SA algorithm to solve equal-sized DFLPs and proved that SA is more efficient than genetic algorithm (GA) in computational time. Şahin et al. 5 proposed an SA for the DFLPs with budget constraints. Rezazadeh et al. 25 proposed discrete PSO for solving DFLPs with deterministic demand requirement. Moreover, Derakhshan Asl and Wong 26 proposed a modified PSO algorithm with two local search methods to solve DFLPs, where facilities have fixed shapes and the demand requirement is considered as a certain value. Hosseini-Nasab and Emami 27 proposed a hybrid PSO for equal-sized facility layout with complex discrete coding technique under a deterministic environment. A permutation-based GA algorithm was proposed to solve DFLPs with equal-sized facilities. 28
The assumption that all facilities have fixed shaped or equal-sized during different periods is unreasonable in practical application. So far, there is no research focus on adopting PSO and SA in the field of UA DFLPs with uncertain demands, variation shapes, and free orientations. Therefore, this study proposes a novel model of UA DFLPs with fuzzy random demands and develops a hybrid PSO and SA algorithm to solve the proposed model within reasonable runtime, which makes planning and optimization of facility layout more comprehensive, realistic, and reasonable.
Problem formulation
A mixed integer nonlinear programming (MINLP) formulation is proposed for UA DFLPs under a fuzzy random environment where the shapes are unfixed throughout the time horizon, to create a continuous facility arrangement. That is, the objective function for UA DFLPs with fuzzy random demands is modeled to solve facilities arrangement in a continuous space. The model is formulated with the following assumptions: (1) there are multi-periods consisting of entire planning horizon, (2) the profile of department area is regarded as rectangle or square shapes ignoring its outline details, (3) the material demands between facilities are defined as FRVs, (4) each facility has different rearrangement cost, and (5) each facility has unfixed shapes and free orientations (i.e. the length and width of a facility can be exchanged).
Notations
The notations are given as follows:
Indexes
Variables

Parameters
Dealing with FRVs
Considering the uncertainty nature of product demand, the material demand between facilities is defined as an FRV. The FRV

Objective function for total material handling costs minimization
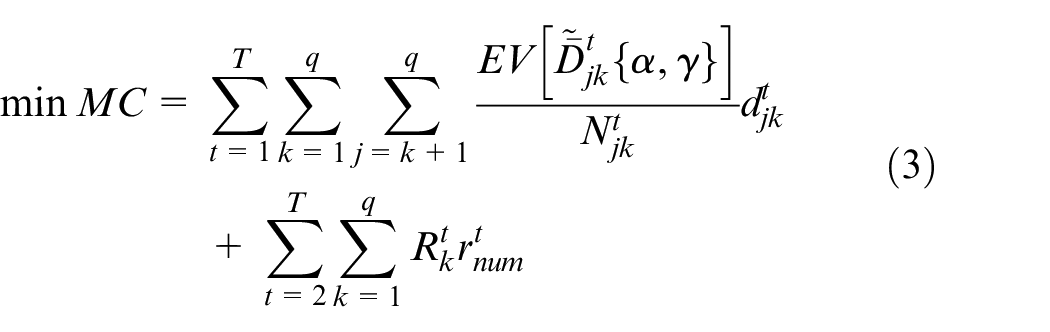
Material handling cost is an important measure for the rationality of layout. In this model, two decisive parts are taken into account, including the material handling costs and the rearrangement costs, both of which are crucial when planning the DFLPs. The novel objective function of UA DFLPs model under fuzzy random environment for the total material handling costs minimization is described as follows

Based on the transforming process and the objective function formula, the objective in equation (2) is transformed into the following expected value model
Subject to


It is notable that several constraints have to be met simultaneously to achieve satisfying solutions for DFLPs objective function, including spatial non-overlapping constraints, area constraints, logical constraints, and non-negative constraints. These constraints are explained as follows








The first set of area constraints (equations (6) and (9)) guarantees that each facility is assigned within the boundary shop floor, respectively. The second set of spatial non-overlapping constraints (equations (10) and (11)) ensures that there is no spatial overlapping between adjacent facilities. The third set of logic constraints (equations (12) and (13)) determines whether a facility needs to be re-arranged in the following period. It is worth noting that all parameters or variables in the objective function cannot take any negative values.
The proposed hybrid PSO and SA algorithm
The hybrid PSO and SA algorithm can combine each other’s merits for solving UA DFLPs. PSO is easy to trap in local optimum, but SA is known as a very fast algorithm among other local search-based metaheuristics. Moreover, SA has other advantages such as avoiding local minimum, accepting worse solution as a new solution with a certain probability, and less computational costs. Therefore, PSO is hybridized with a simple and fast SA to obtain a better solution. To further improve the quality of the solution, two swapping methods, two local search methods, and a shifting method are applied in this work. The detailed introduction is provided in following sub-sections.
Standard PSO
PSO was initially proposed by Kennedy and Eberhart.
31
Each member in a flock of birds determines its velocity and position on the basis of their personal experience as well as social experience obtained through interaction with other members of the flock.
27
Supposing a swarm of


where
Standard SA
SA was initially proposed by Kirkpatrick et al.
32
SA starts with an initial solution and then subsequently proceeds to neighboring solutions by a random move until the stopping criterion is achieved.
12
SA algorithm begins with an initial temperature denoted by

where

where
The proposed hybrid algorithm
Initial solutions
The proposed hybrid PSO algorithm generates
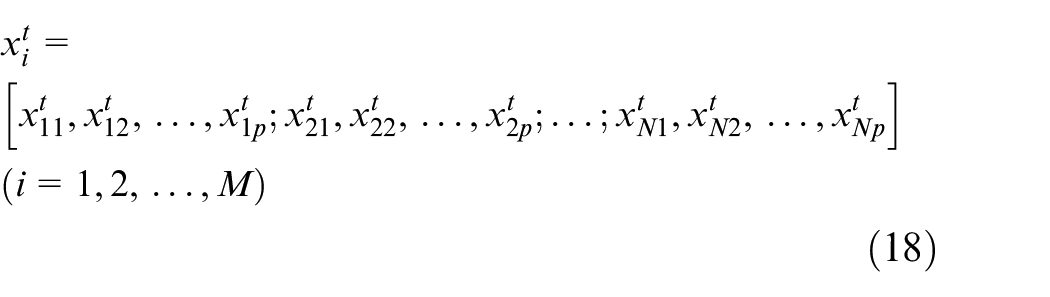
where each element in the particle matrix represents the two-dimensional (2D) position of each facility at iteration
The modified particle-updating process
Since the proposed algorithm employs


where
Swapping method
In order to maintain the diversity of the population and avoid prematurity convergence, the swapping method is also applied for each particle in each iteration of the hybrid algorithm with a dynamic probability. The swapping method includes facility-swapping method and period-swapping method. The detailed introduction is provided as follows:
Dynamic swapping selection scheme
It is obvious that the probability for the swapping method is relatively low at early iteration. As iteration proceeds, the algorithm is easier to trap into local optimum. Therefore, the probability of swapping needs to gradient increase. Moreover, fixed iteration or probability of swapping scheme for the whole swarm may increase the disturbance and lead to algorithm divergence. This article proposes to use gradient sigmoid function to calculate the probability as follows

where
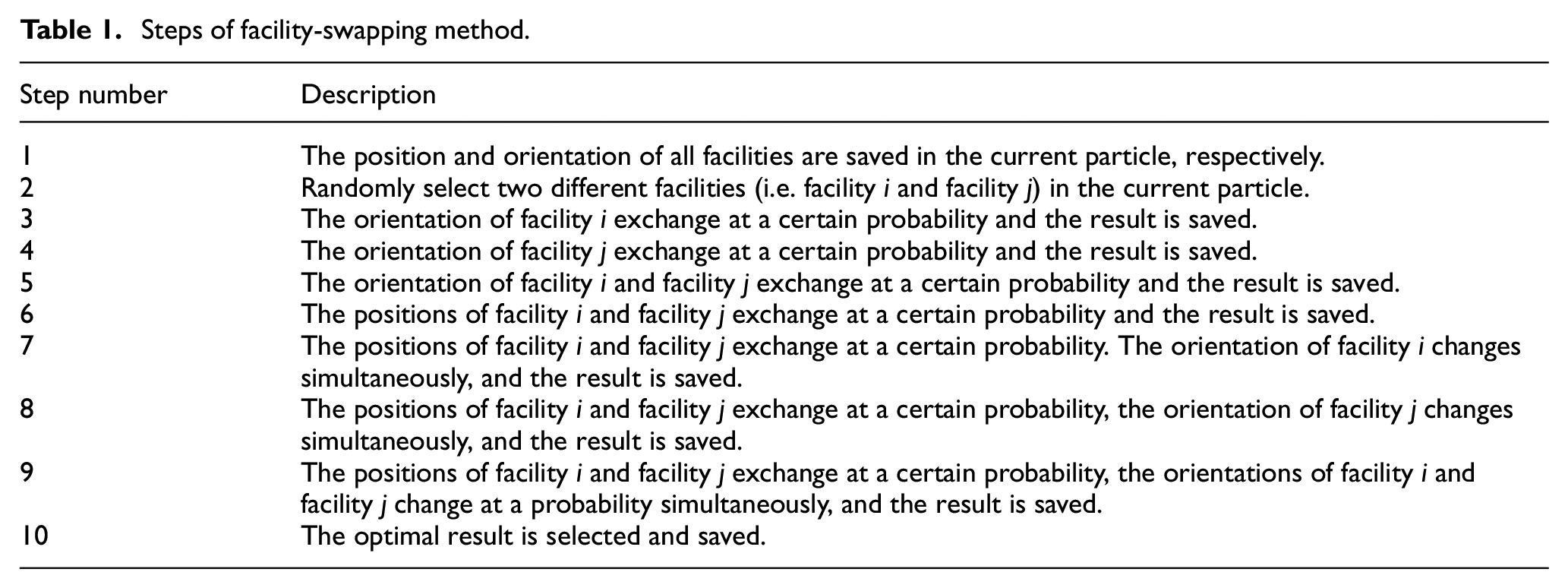
Facility-swapping method
As mentioned before, the facility-swapping method is applied for each particle with a probability
Steps of facility-swapping method.
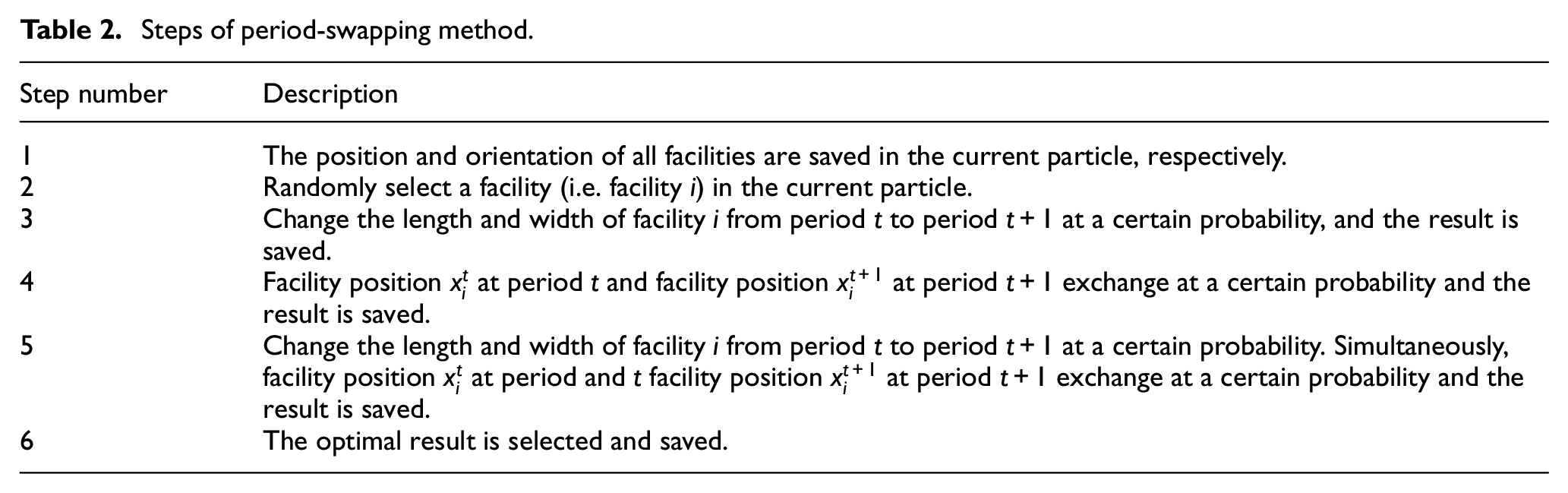
Period-swapping method
The period-swapping method is usually applied to the best global solution in DFLPs. When the number of iterations is no less than the subtraction of maximum iteration number to 50, this method is used for each pair of dynamic periods with a probability
Steps of period-swapping method.
Local search method
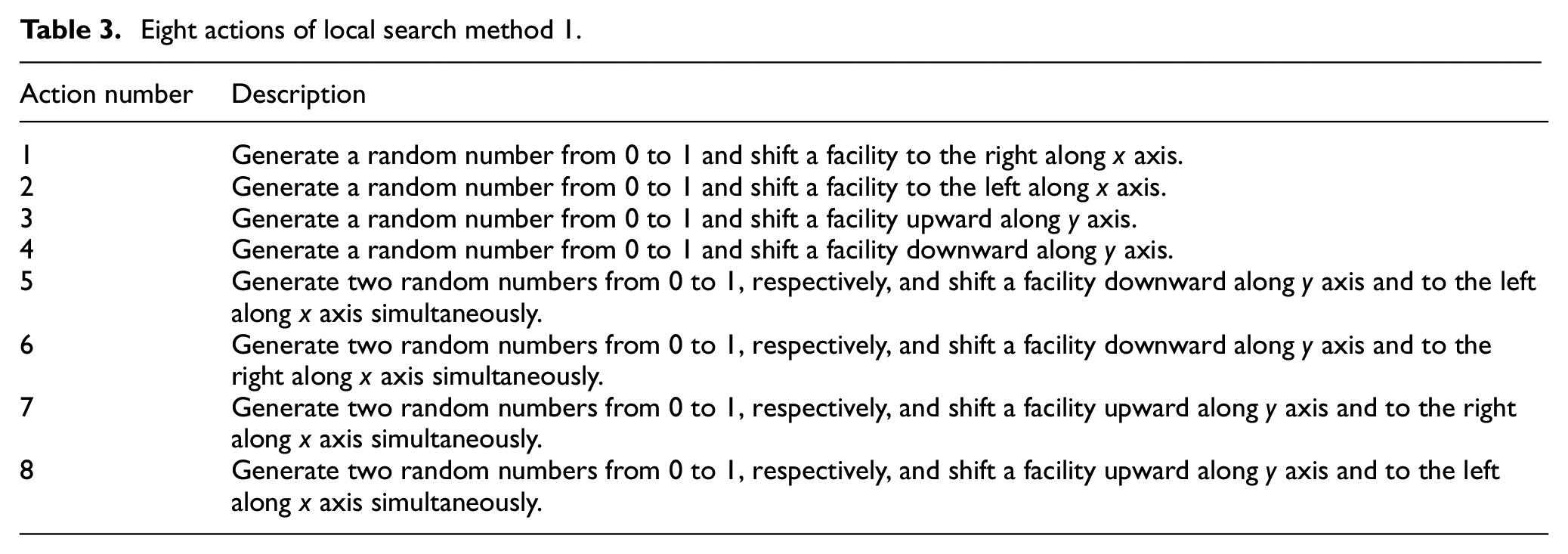
Local search method 1
The local search method 1 is applied in each iteration for the best global solution of the proposed hybrid PSO and SA algorithm when the global solution of the next generation is worse than that of the previous generation. For each facility, the length and width are exchanged and movement along
Eight actions of local search method 1.
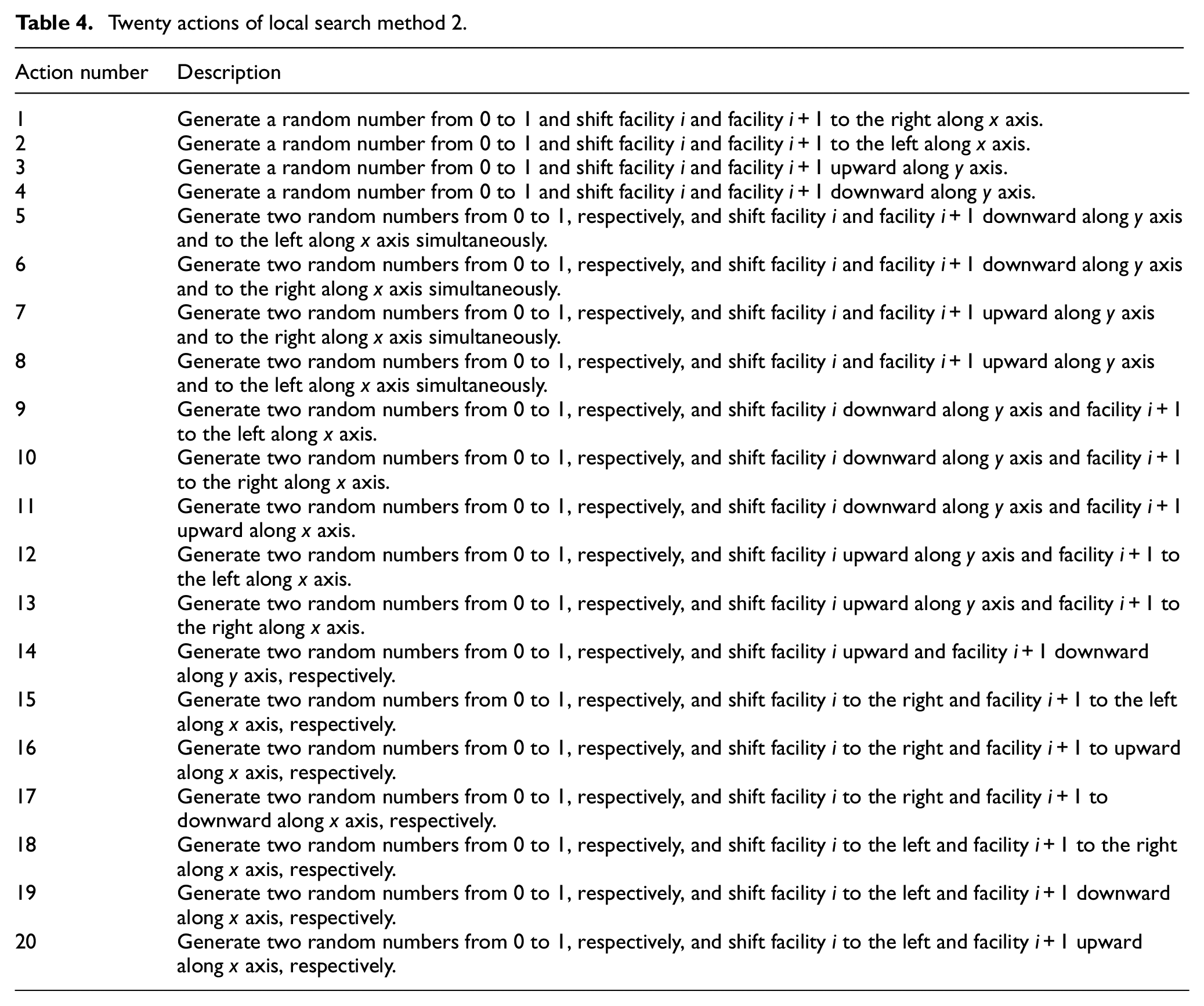
Local search method 2
The local search method 2 is utilized in each iteration for the best global solution of the proposed hybrid algorithm when their number of iterations is no less than the subtraction of maximum iteration number to 50. Before implementing, a permutation vector
Twenty actions of local search method 2.
Shifting method for the overlapped facilities
The spatial overlapping between adjacent facilities is infeasible in facility layout. The previous study proposed a penalty for violent solution.26,33 Jolai et al.
13
indicated that penalty cannot completely prevent spatial overlapping between adjacent facilities and proposed a shifting method with a single direction as well as repeated step length with multiple attempts. However, it may result in increased time consumption and efficiency decrease. This article develops a multi-direction shifting method with two combination directions. The two combination directions are classified as moving to the right side or left side along
Step 1: Facility 1 is overlapped with facility 2. If
Step 2: After Step 1, facility 1 may be overlapped with facility 4. Similarly, facility 4 moves to left along the x axis.
Step 3: Facility 3 is overlapped with facility 2. If
Step 4: Facility 5 is overlapped with facility 2. Similarly, facility 5 moves downward along the y axis.
Step 5: Facility 6 is overlapped with facility 7 and facility 2. Facility 6 moves to left along the x axis. Facility 6 may also be overlapped with facility 7, and facility 7 moves downward.
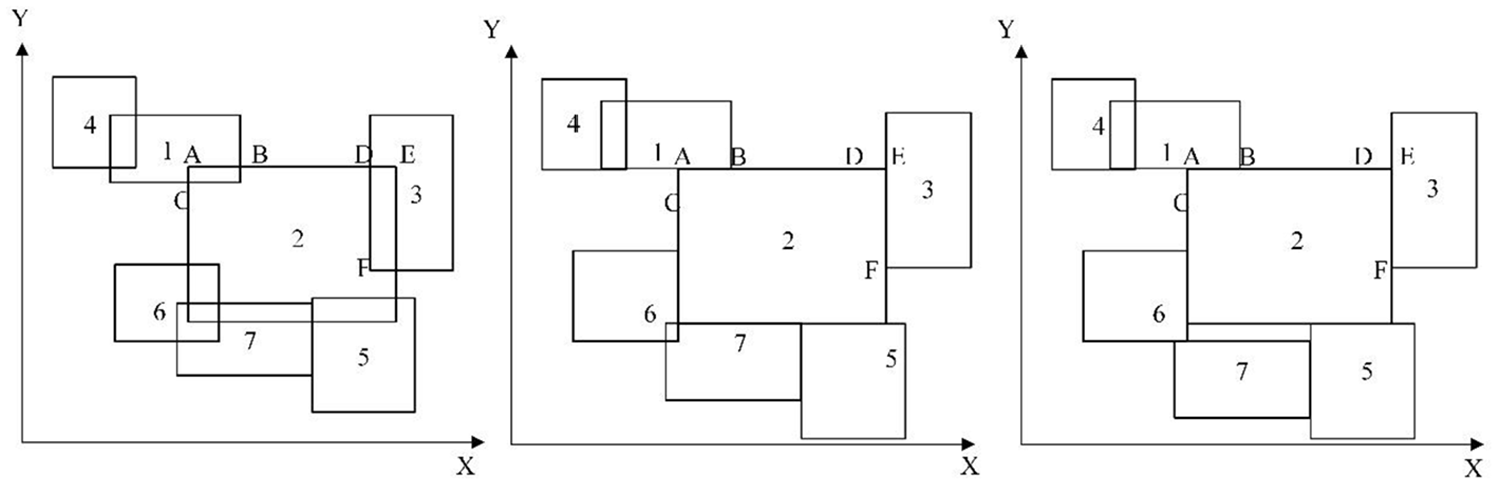
The illustrative example for shifting method.
The overall procedure for hybrid algorithm
The flowchart of the hybrid algorithm is shown in Figure 2.
The steps of the proposed algorithm are demonstrated as follows:
Step 1: According to the mathematics method introduced in section “Dealing with FRVs,” convert the fuzzy random values into deterministic values before algorithm running.
Step 2: Set PSO and SA relative control parameters as described in section “The proposed hybrid PSO and SA algorithm” (such as particles’ number
Step 3: Generate the particles’ random positions within the boundary of the shop floor. According to section “Standard PSO,” each particle is encoded in a multiple dimensions matrix with the total number of facilities at different production periods.
Step 4: Evaluate each solution based on the calculation of fitness value and update the value of local best fitness value
Step 5: Run the SA for the
Step 6: According to equations (17) and (19), update each particles’ velocity and position.
Step 7: Evaluate each particles fitness value and update the value of
Step 8: Replace
Step 9: If
Step 10: Apply the facility-swapping method at a certain probability
Step 11: Apply local search method 1 to enhance the global search region for
Step 12: If the number of iterations is no less than the subtraction of maximum iteration number to 50, apply period-swapping method at a probability
Step 13: Use local search method 2 to enhance the global search region
Step 14: Apply shifting method for the overlapped facilities.
Step 15: Update particle,
Step 16: If the iteration reaches the maximum, then stop the program. Return the values of
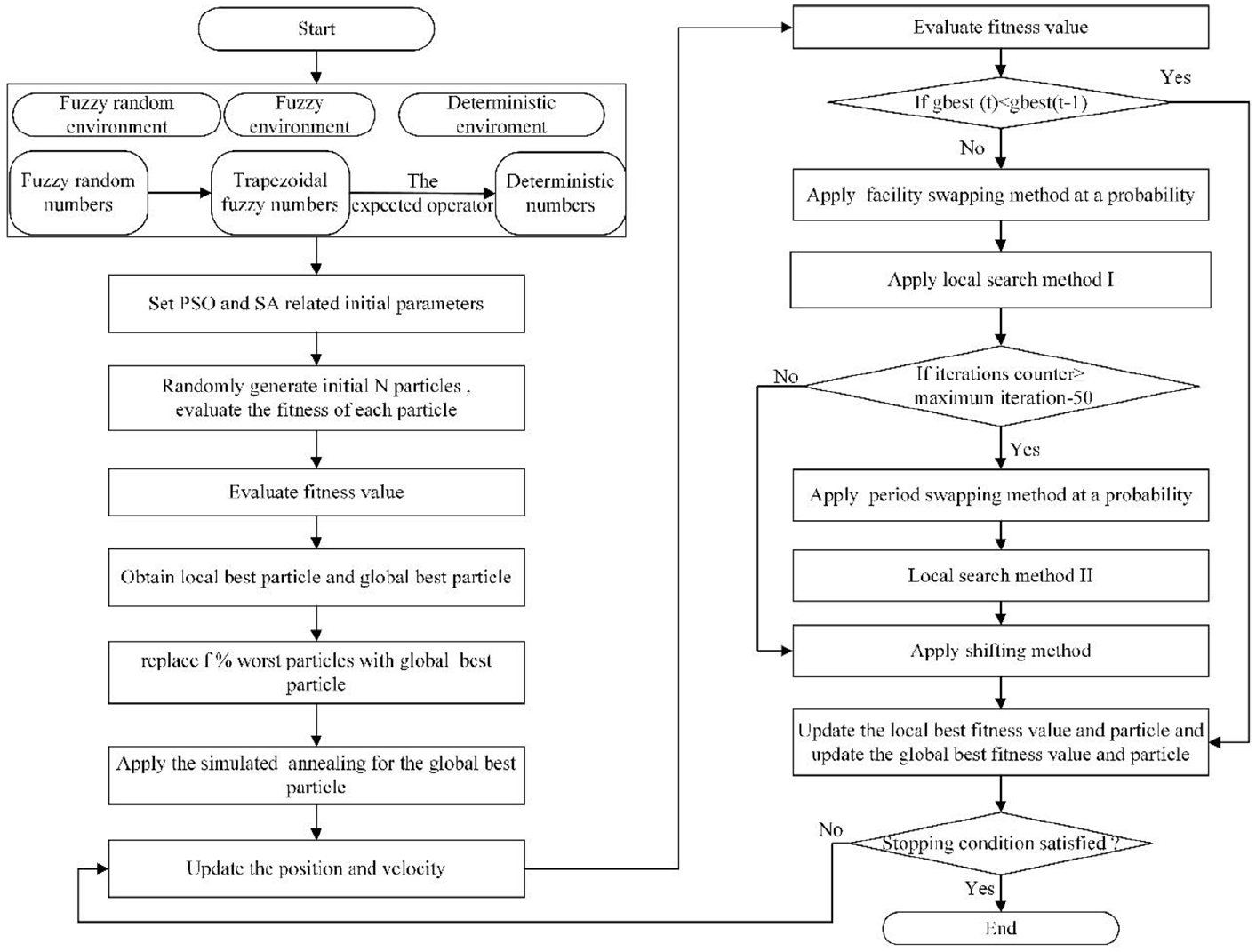
Flowchart of the proposed hybrid algorithm.
It is important to notice that applying the improved hybrid algorithm for the optimization objective, the pseudo code is generated. At each iteration of the hybrid algorithm, the current solution and the
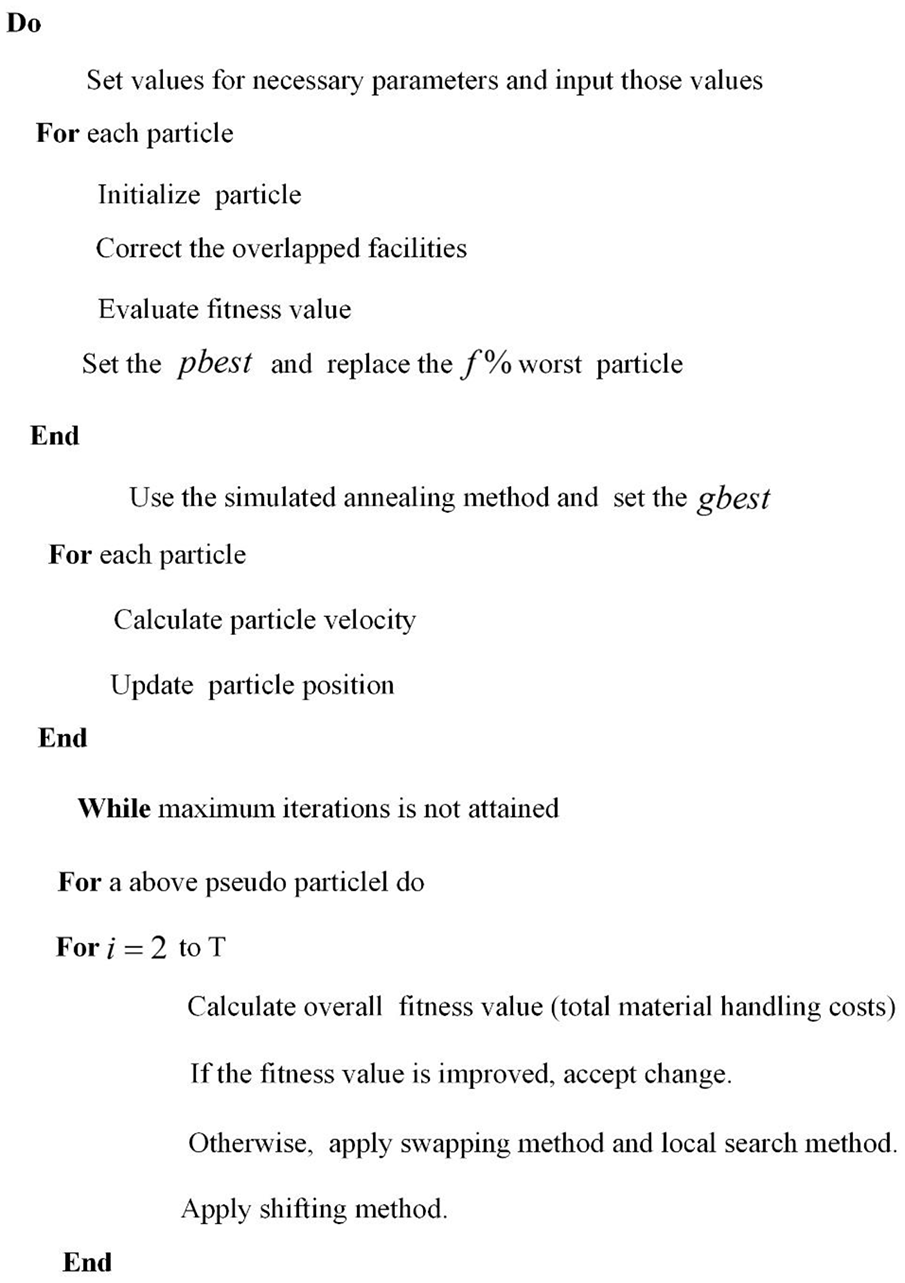
The complete pseudo code of the procedure.
Performance evaluation
Based on our knowledge, the proposed model has not been studied so far, and no other solutions have been found to compare it with that of the proposed algorithm. To evaluate the performance of the proposed hybrid algorithm, some computational experiments have been discussed in the following sub-section.
Test problems
There are three metaheuristic methods (Dunker et al., 34 Jolai et al., 13 Derakhshan Asl and Wong 26 ) for DFLPs. To compare the attained results of the proposed algorithm with those of hybrid genetic algorithm (HGA), 34 multiple objective particle swarm optimization (MOPSO), 13 and the modified PSO 26 for two available test problems, the minimization material handling costs and rearrangement costs are taken as an optimization objective, and their related constraints are considered in our experiments.
Two test problem instances were taken from Dunker et al.
34
Two test problems were described as follows: (1) DFLPs with six facilities and six dynamic periods (P6T6) and (2) DFLPs with 12 facilities and 4 dynamic periods (P12T4). According to basic information and data from Derakhshan Asl and Wong,
26
all facilities have fixed areas and shapes, and plant floor is restricted to
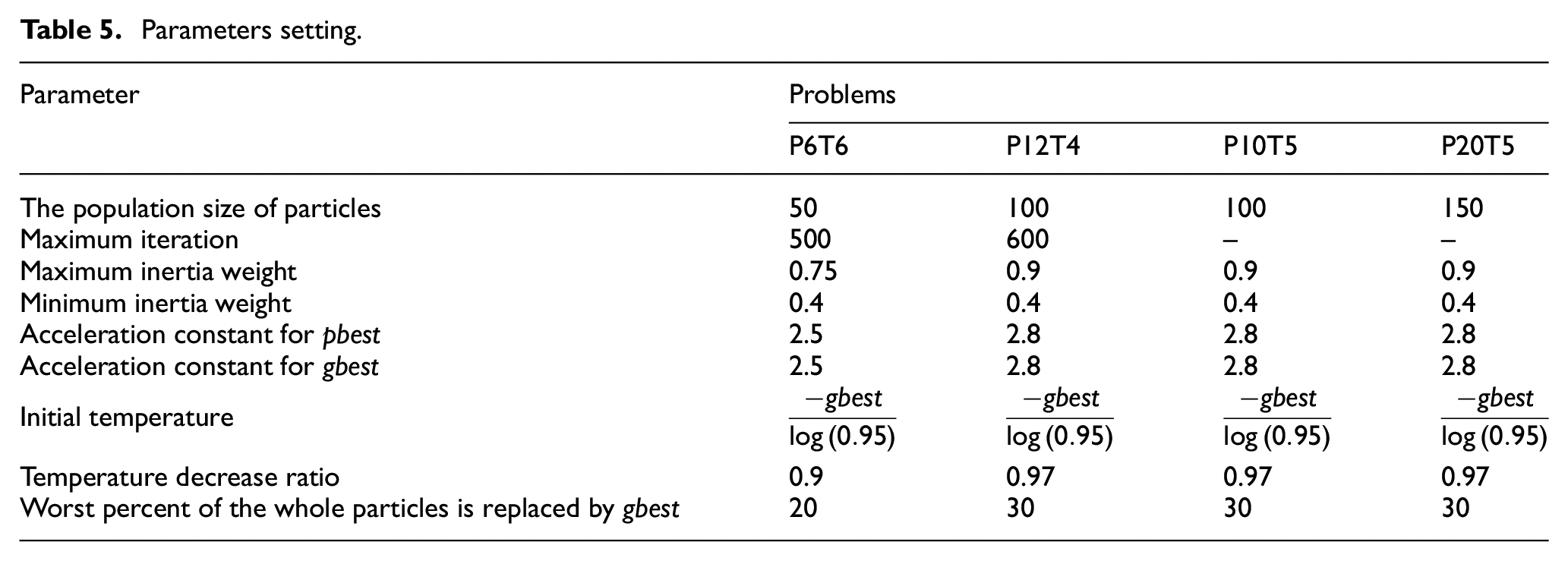
Parameters control is significantly important to the proposed algorithm. To determine the values of parameters, extensive experiments are implemented with a different set of parameters (i.e. trial and error method). Parameter settings for the proposed method are presented in Table 5. The proposed algorithm is coded in MATLAB and executed on a Windows 7 operating system with 2.2 GHz CPU and 8GB RAM.
Parameters setting.
Results and discussion
To ensure a reasonable comparison, all solutions are obtained with the same number of iterations and population sizes. Each test problem was conducted 10 times for the proposed algorithm. The comparative results and runtime of three algorithms are given in Table 6.
The comparison of three algorithms for test problems P6T6 and P12T4.
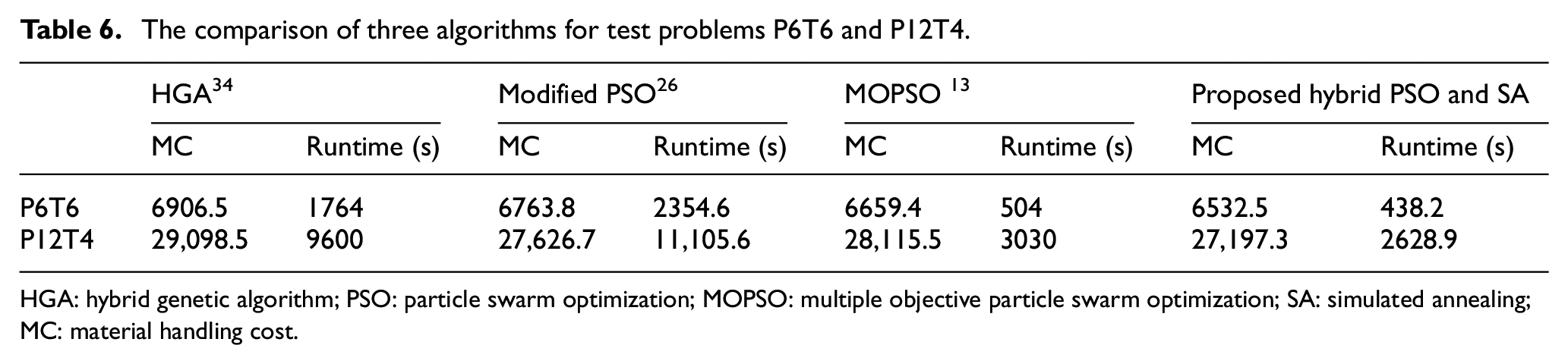
HGA: hybrid genetic algorithm; PSO: particle swarm optimization; MOPSO: multiple objective particle swarm optimization; SA: simulated annealing; MC: material handling cost.
Equation (23) is applied to compare the result of the proposed hybrid algorithm with three metaheuristic methods

where
As shown in Table 6, the best-found solution of the proposed hybrid algorithm is 6532.5. Note that the best-found solution is compared on condition that the number of iterations is equal. According to Table 2 and equation (23), the best-found solution of the proposed algorithm has improved P6T6 problems by 5.73%, 3.54%, and 1.94% in comparison with HGA, modified PSO, and MOPSO, respectively. Moreover, it can be seen that the best-found solution for the P6T6 problem using the proposed algorithm with minimum runtime is 438.2 s. Therefore, the proposed hybrid algorithm has improved solution quality and computation time for P6T6 problem. The center coordinates of the best-found layouts for P6T6 are shown in Table 7. Figure 4 presents the best-found layout of P6T6 for Period 6.
Center coordinates of facilities for the best-found layouts of P6T6.
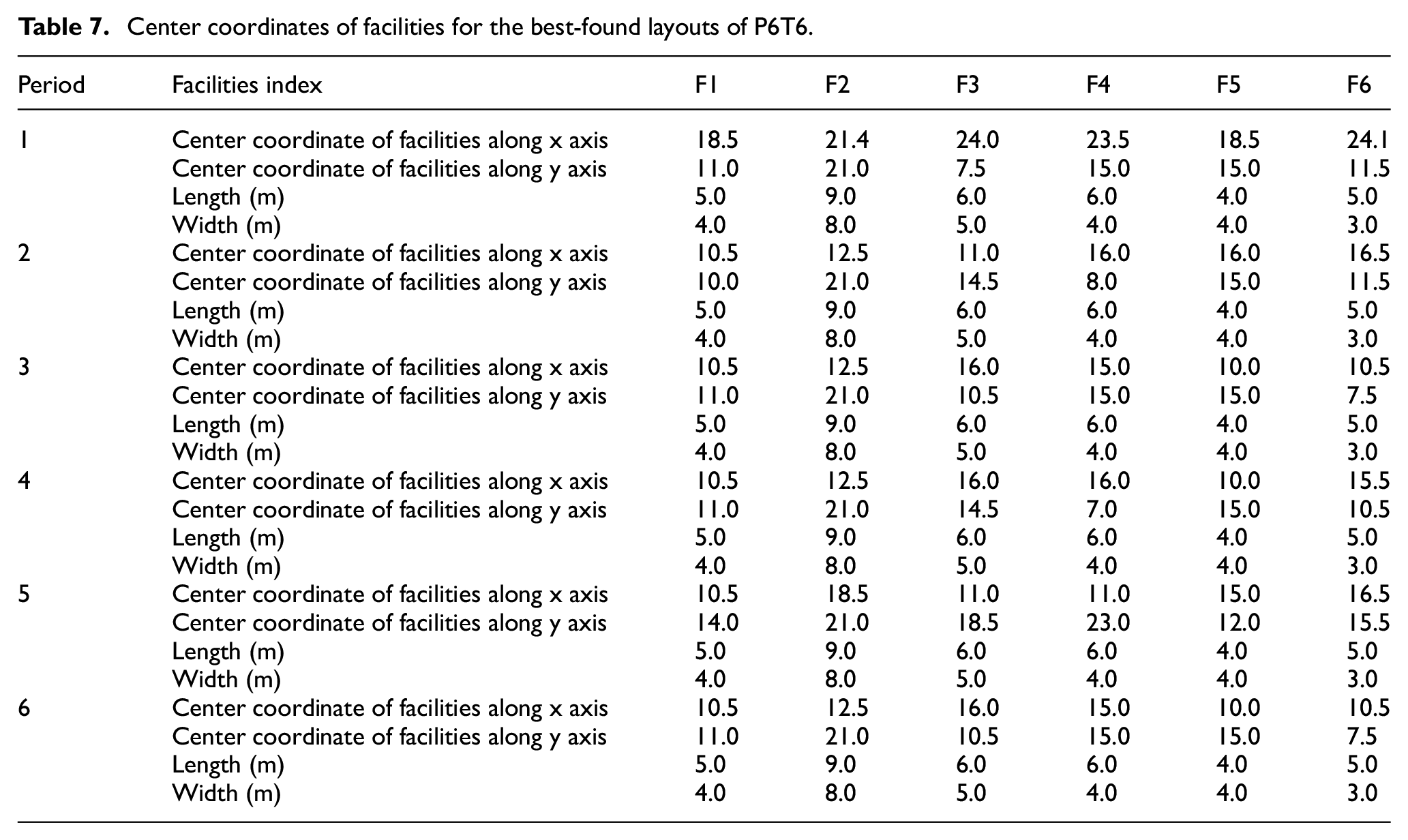
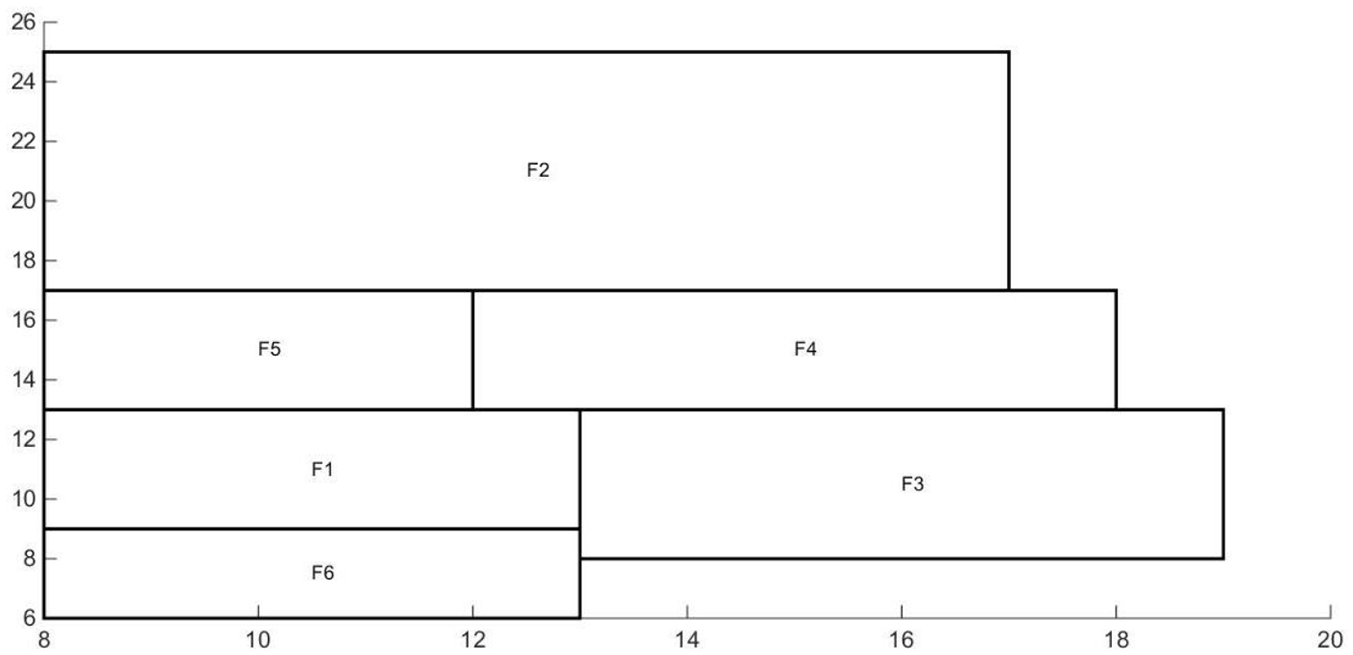
The best-found layout of P6T6 for Period 6.
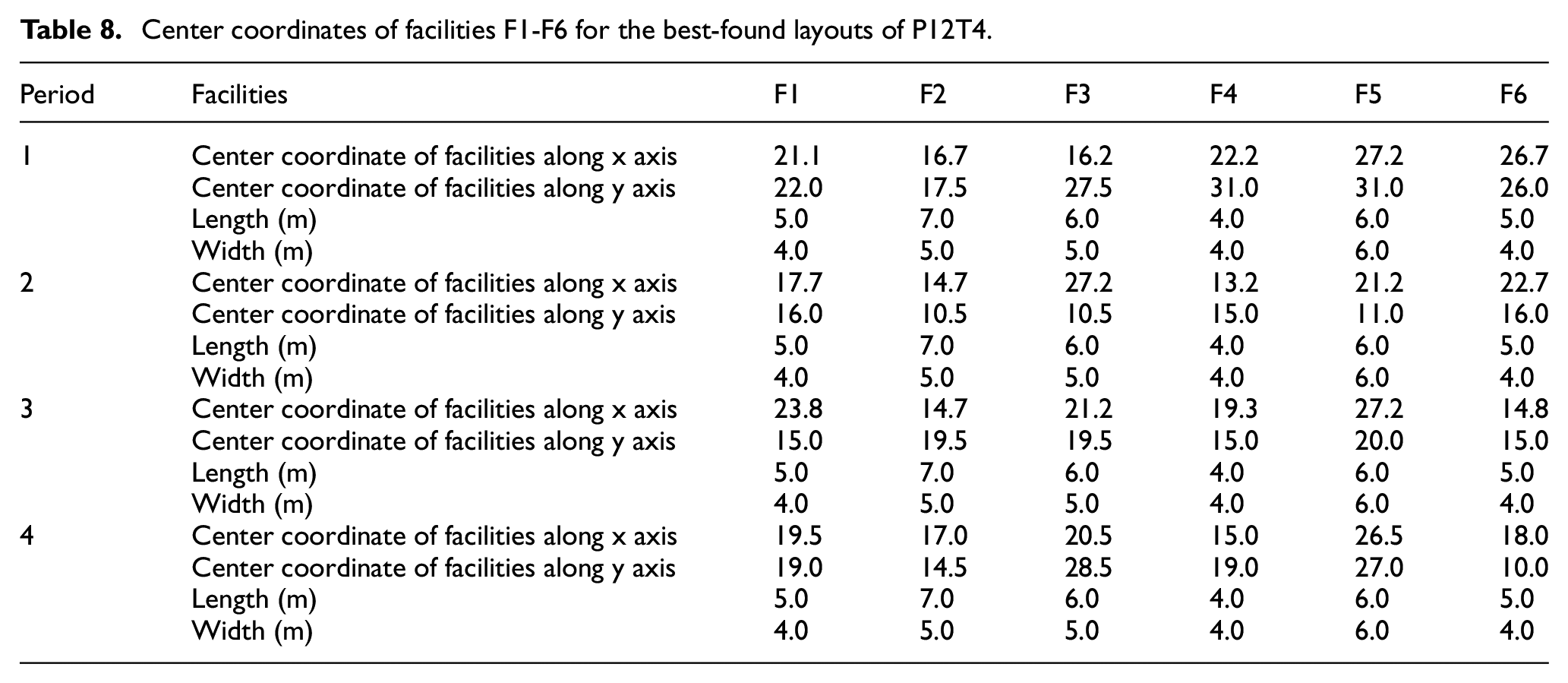
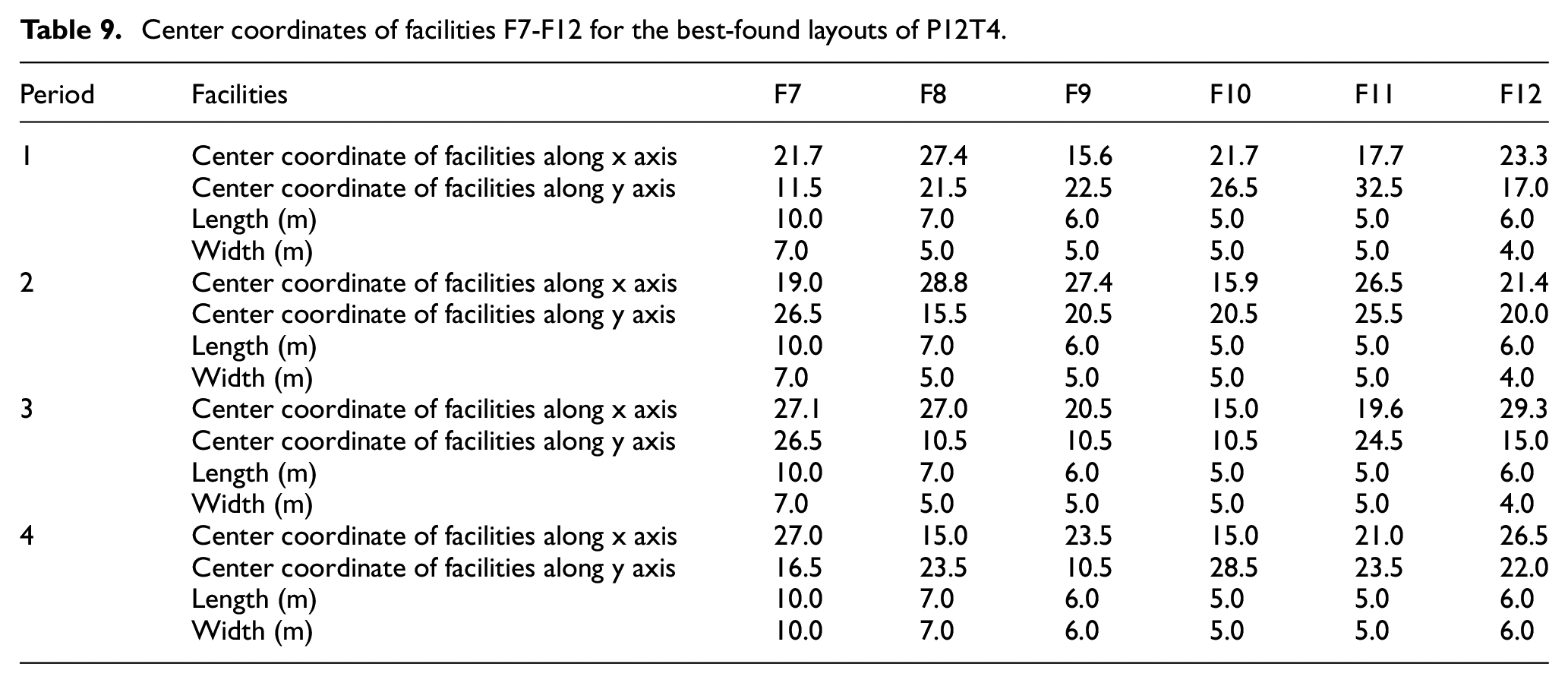
As shown in Table 6, the best solution of the proposed hybrid algorithm is 27,197.3 after 600 iterations. According to Table 6 and equation (23), the proposed algorithm has attained the improvement in P12T4 problems by 6.99%, 1.58%, and 3.38% in comparison with HGA, modified PSO, and MOPSO, respectively. Moreover, it can be seen that the best-found solution for P12T4 problem using the proposed algorithm with minimum runtime is 2628.9 s. Therefore, the proposed hybrid algorithm has improved solution quality and computation times for P12T4 problem. The center coordinates of the best-found layouts for P12T4 are shown in Tables 8 and 9. Figure 5 shows the best-found layout of P12T4 for Period 4.
Center coordinates of facilities F1-F6 for the best-found layouts of P12T4.
Center coordinates of facilities F7-F12 for the best-found layouts of P12T4.
The best-found layout of P12T4 for Period 4.
It is clear that the proposed hybrid algorithm has better performance in sharp comparison with HGA, modified PSO, and MOPSO in the literature. That is because PSO is a classical swarm intelligent algorithm. The information among particles can be exchanged and shared while GA cannot, which is helpful to obtain a better solution. However, it is well known that PSO has weak local search ability, the introduction of SA can compensate for this defect because it has a stochastic mechanism for jumping out of local optimum. Moreover, to further improve the quality of the solution, two swapping methods, two local search methods, and a shifting method are applied. The facility-swapping method is utilized to avoid local optimum, and the period-swapping method is used only for DFLPs to improve the quality of layouts. Two local methods are applied to improve local search ability and quality of the solution. In addition, a shifting method can prevent spatial overlapping between adjacent facilities and save the total material handling costs. In short, the application of our hybrid algorithm to DFLPs is attractive in terms of both solution quality and computation time.
Case study
This section presents a practical application of the DFLPs in a new aircraft assembly shop floor to demonstrate the maneuverability and efficiency of the proposed method.
Case representation
The rationality of the facility layout for a new aircraft assembly shop floor planning is critically important for minimizing cost and raising production. It involves physical arrangements of many facilities to suitable sites, such as large assembly fixture storage area, material handling equipment, and machines. Due to the complex aeronautic assembly process and low production efficiency, the layout is implemented in phases. This article focuses on two typical stages including large parts docking and parts assembly. The partial shop floor schematic plan of a new aeronautic assembly shop floor is shown in Figure 6. It covers an area of
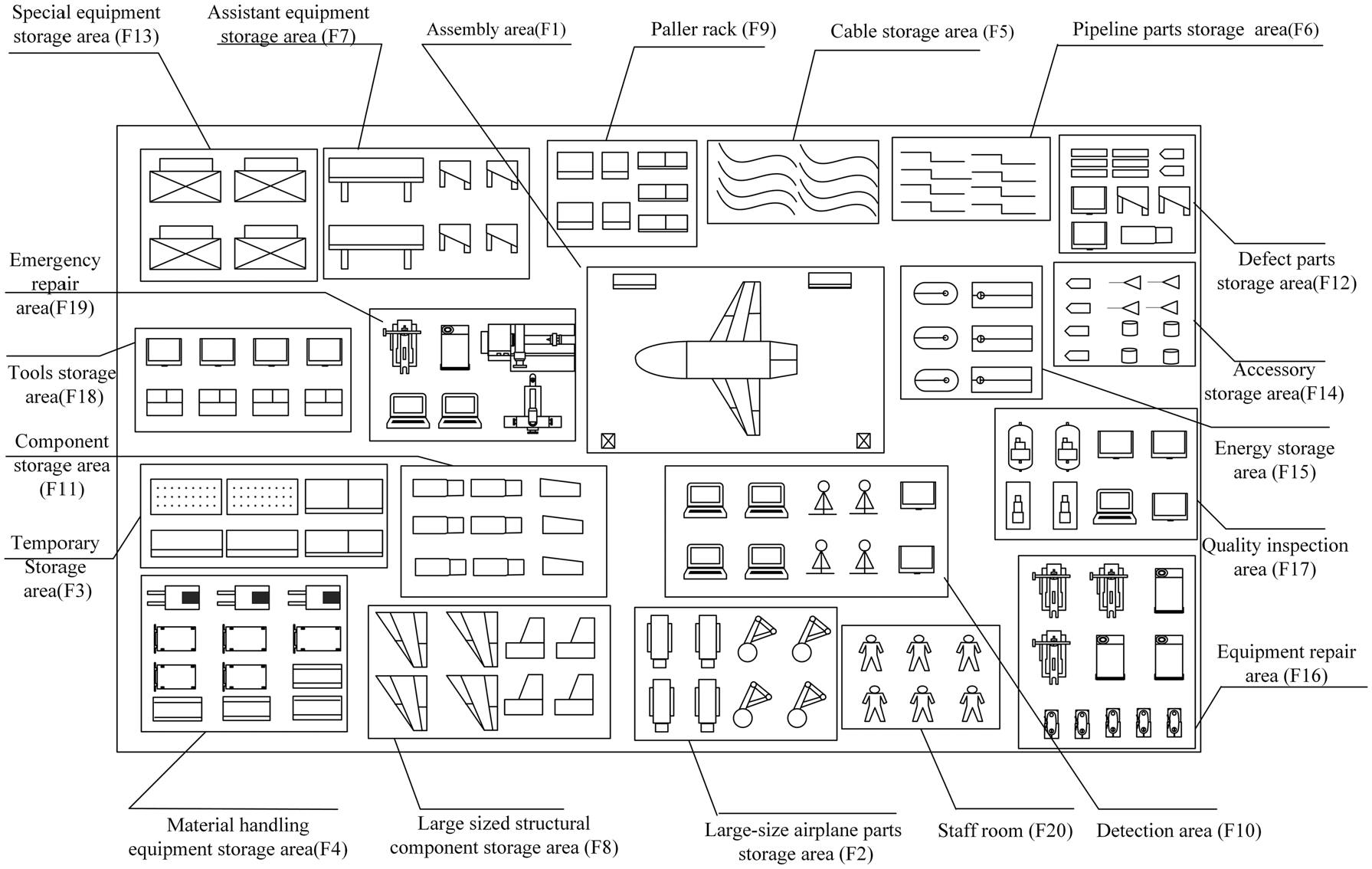
The partial shop floor schematic plan of a new aeronautic assembly shop floor.
As mentioned before, the facility layout planning is usually drawn up before implementation. The demands between facilities can be approximately predicted by market statics at the planning stage, but they would fluctuate at real production within a certain range. The layout planner can only provide value ranges roughly on the basis of experience. Therefore, the uncertainty caused by market volatility can be described in fuzzy logic. In the production stage, since the enterprise information system has been widely applied, the material flow can be monitored. 35 Therefore, the product demands between facilities can be predicted by history data such as enterprise resource planning (ERP) data, bill of materials (BOM), and quality data, which assume following a normal distribution. This article applies FRVs to describe the two-fold uncertainty of demand for dealing with DFLPs. Moreover, to further demonstrate the advantages of the proposed hybrid method under a fuzzy random demand, more computational results are shown using the hybrid PSO and SA algorithm to solve DFLPs under different environments and problem instances, respectively. Considering economic and production efficiency, the decision maker’s objectives are to save total material handling costs and prevent the overlap of facilities to avoid unnecessary damage or loss. Therefore, the proposed hybrid method is devoted to minimizing the total material handling costs. Parameter settings for the proposed method are presented in Table 5.
Based on our knowledge, the proposed method has not been considered on solving DFLPs under fuzzy random environment so far. To further illustrate the application of the proposed hybrid method under a fuzzy random demand, two problem instances are conducted as follows: (1) DFLPs under the fuzzy random environment with 10 facilities and 5 periods (P10T5) and (2) DFLPs under the fuzzy random environment with 20 facilities and 5 periods (P20T5). The previous two problem instances are derived from facility layout planning of a new aeronautic assembly shop floor.
Computational results
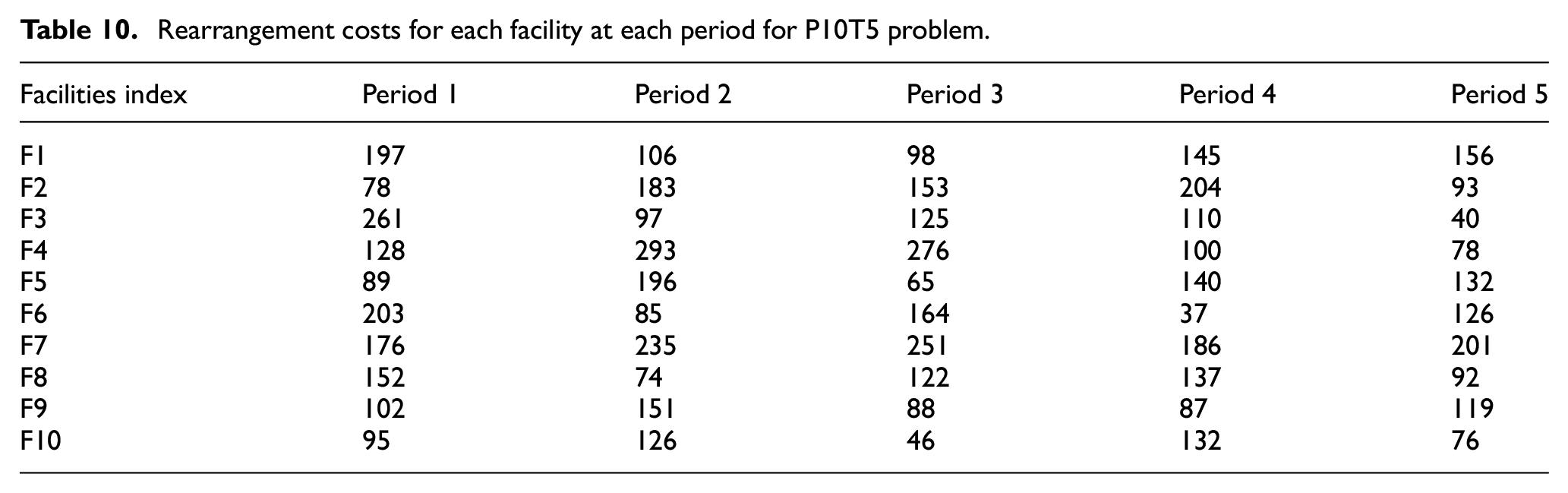
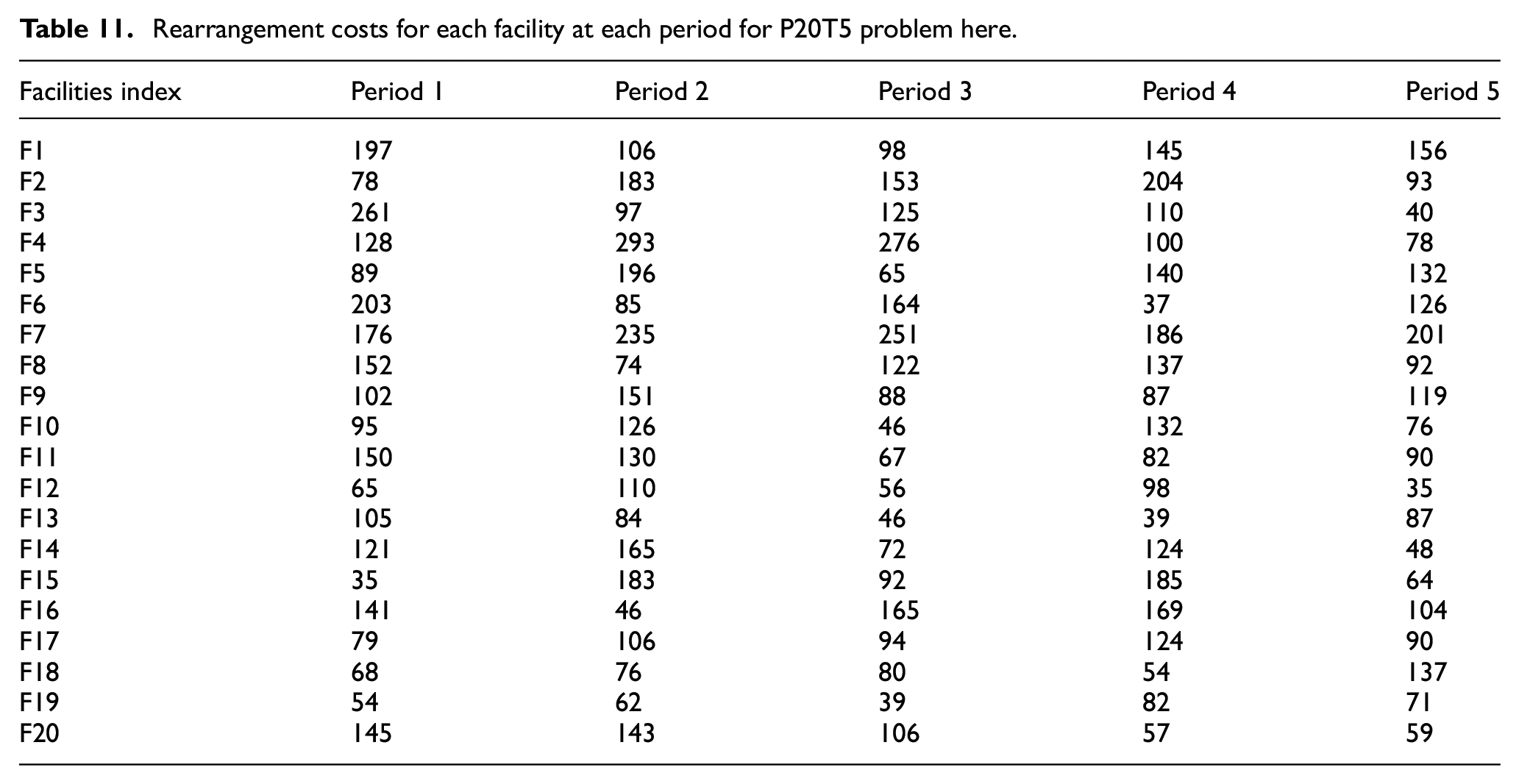
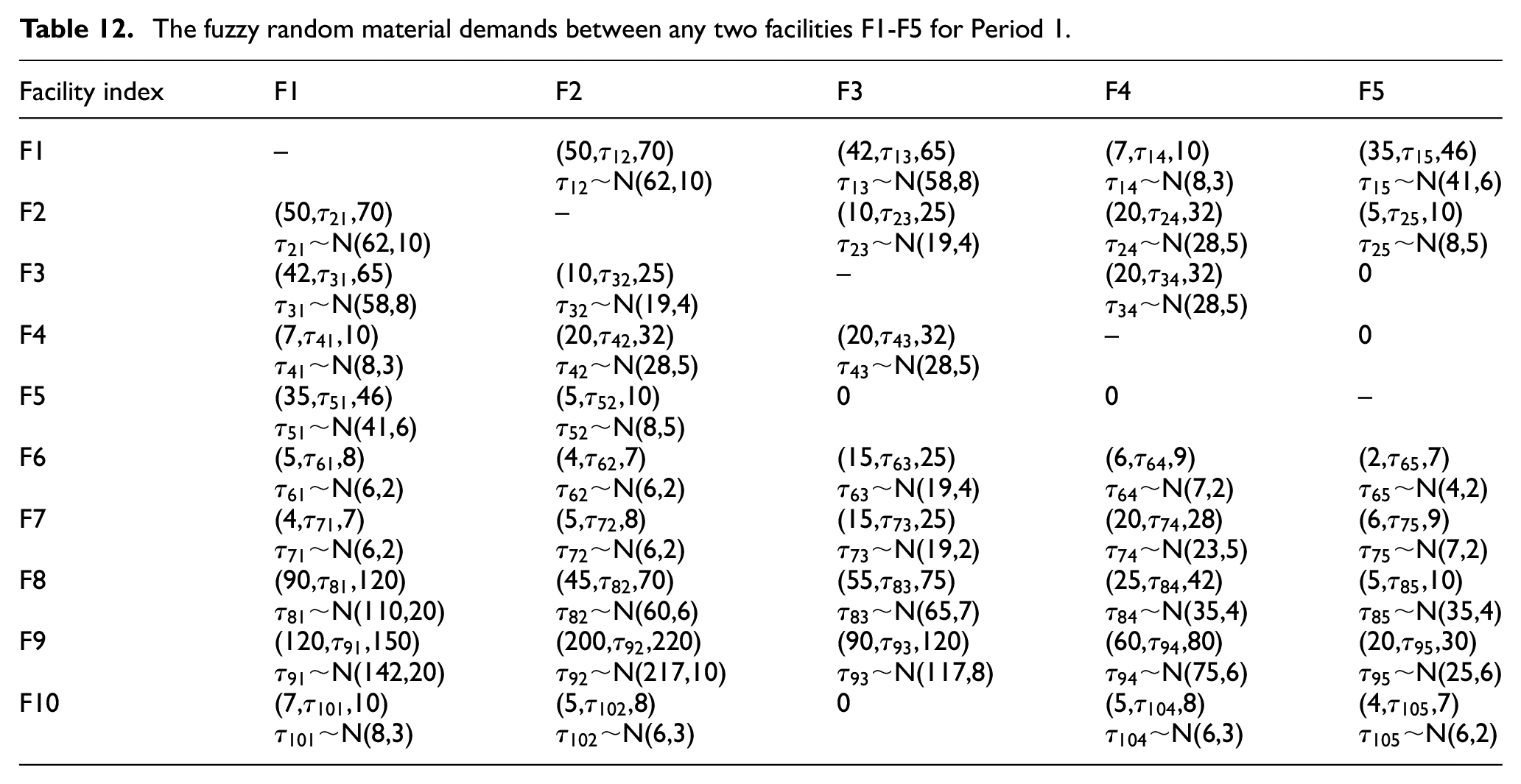
For DFLPs, if a facility needs rearrangement in the next period, the costs cannot be ignored. The rearrangement costs vary with different sites and periods. The rearrangement costs for each facility at each period are shown in Tables 10 and 11, respectively. According to the production schedule, the product demands between facilities for P10T5 problems at the first period are partly listed in Table 12 due to the short text. Using the method introduced in section “Dealing with FRVs,” the fuzzy random demand is transformed into a deterministic value.
Rearrangement costs for each facility at each period for P10T5 problem.
Rearrangement costs for each facility at each period for P20T5 problem here.
The fuzzy random material demands between any two facilities F1-F5 for Period 1.
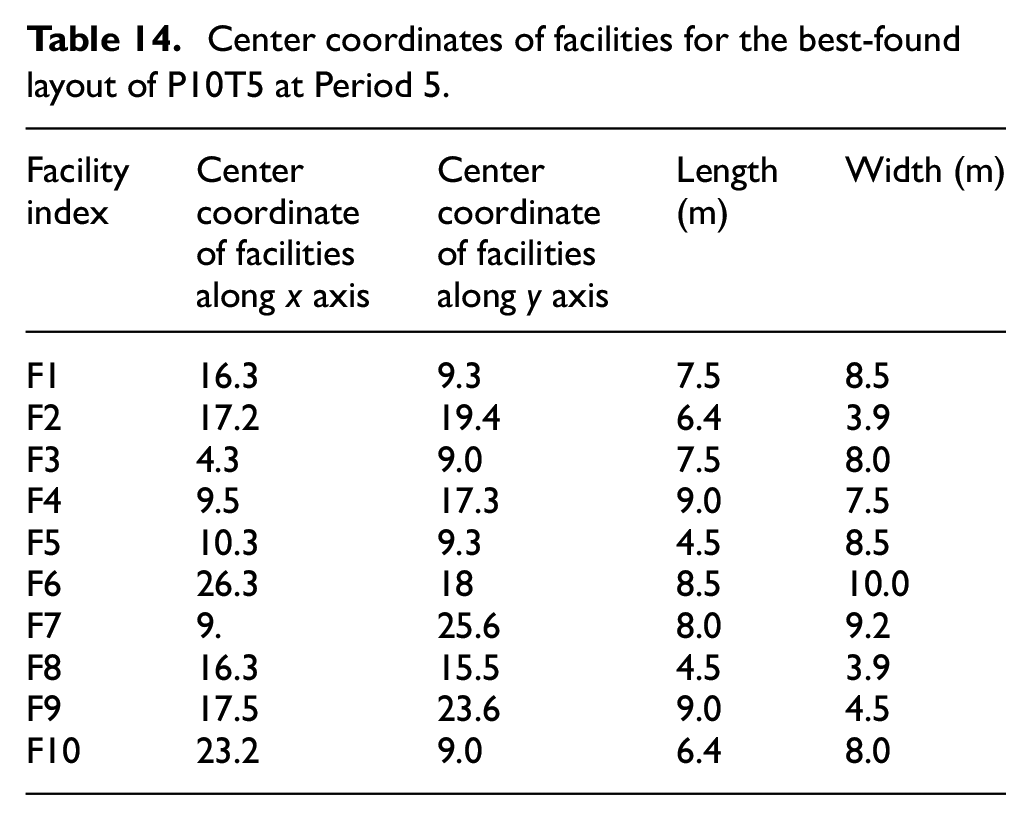
To further assess the quality of the proposed hybrid algorithm, the number of iterations and computing time is increased. After running the program for over 10 times, the hybrid algorithm reaches a good solution after 800 iterations on P10T5 problems. Table 13 shows the convergence of the hybrid algorithm on P10T5 problem under fuzzy random environment. It can be found that the best found result for P10T5 problems is 86,217.9 with the runtime of 6231.5 s. The center coordinates of the best found layout for P10T5 at Period 5 are shown in Table 14. Figure 7 shows the best-found layout of P10T5 for Period 5.
The hybrid algorithm convergence for P10T5 and P20T5 problem.
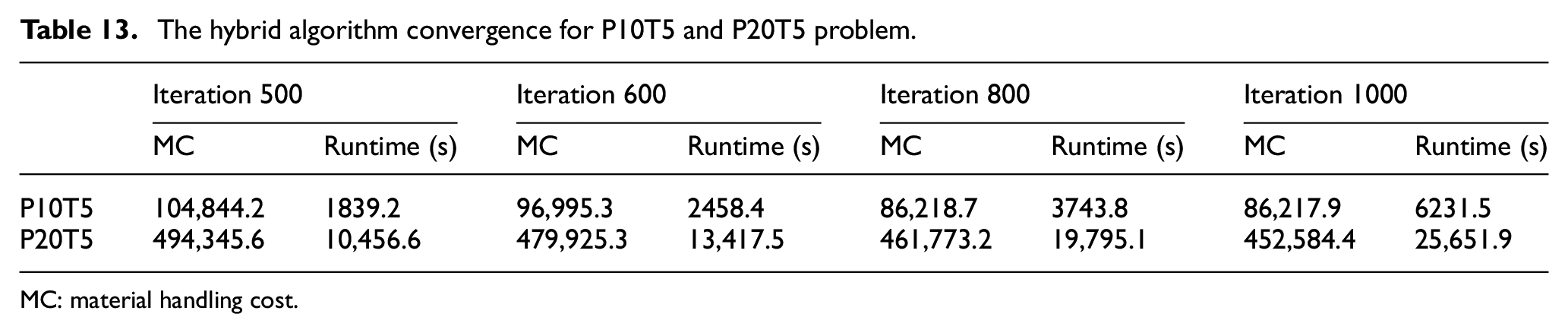
MC: material handling cost.
Center coordinates of facilities for the best-found layout of P10T5 at Period 5.
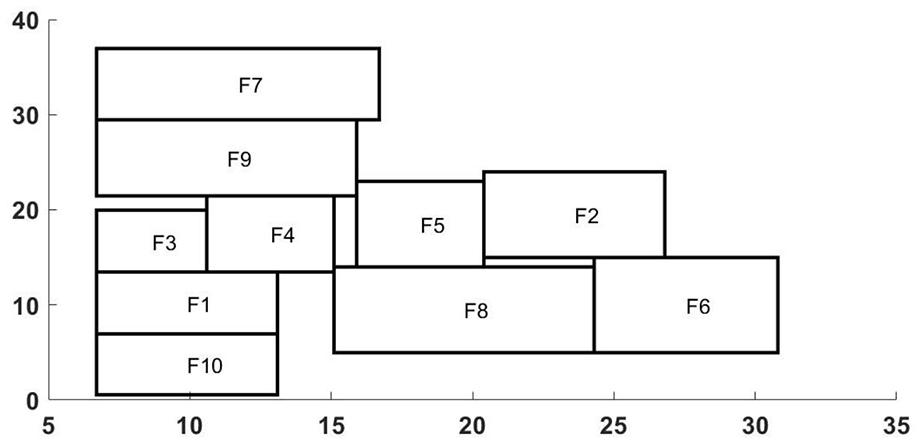
The best-found layout of P10T5 for Period 5.
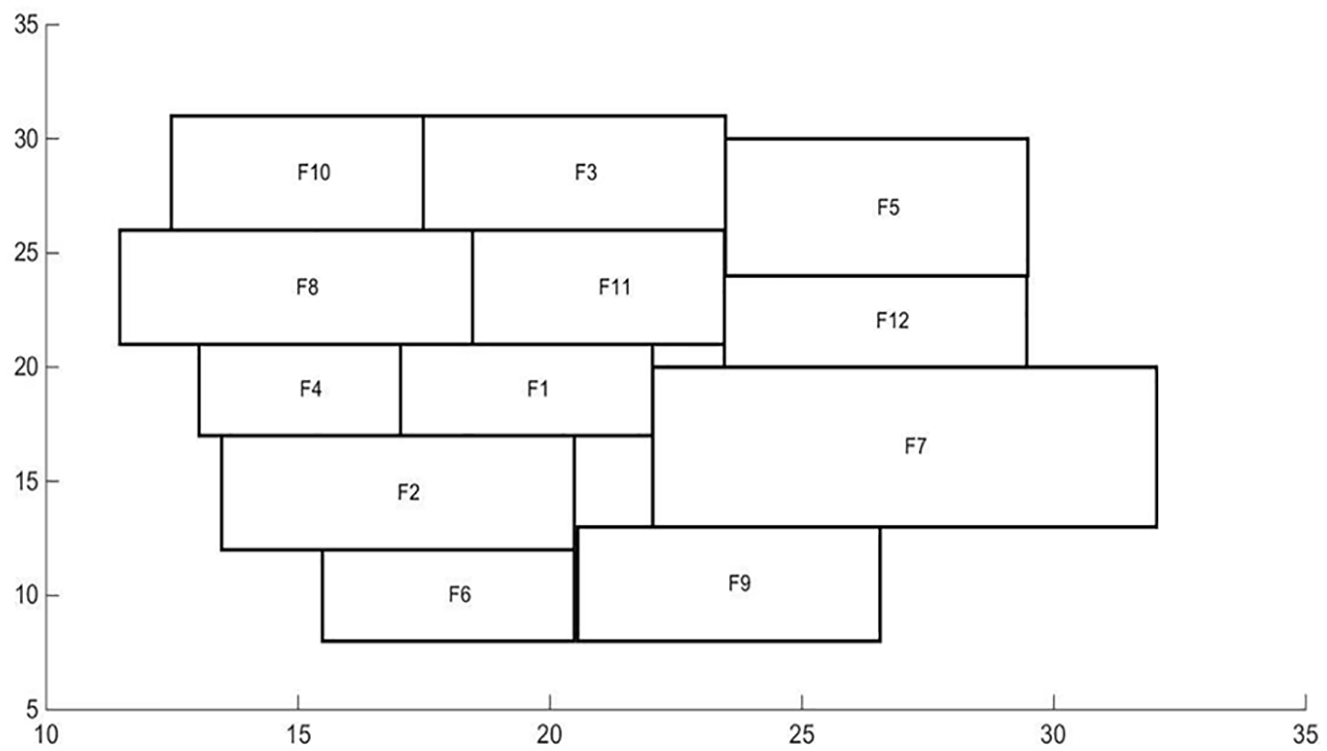
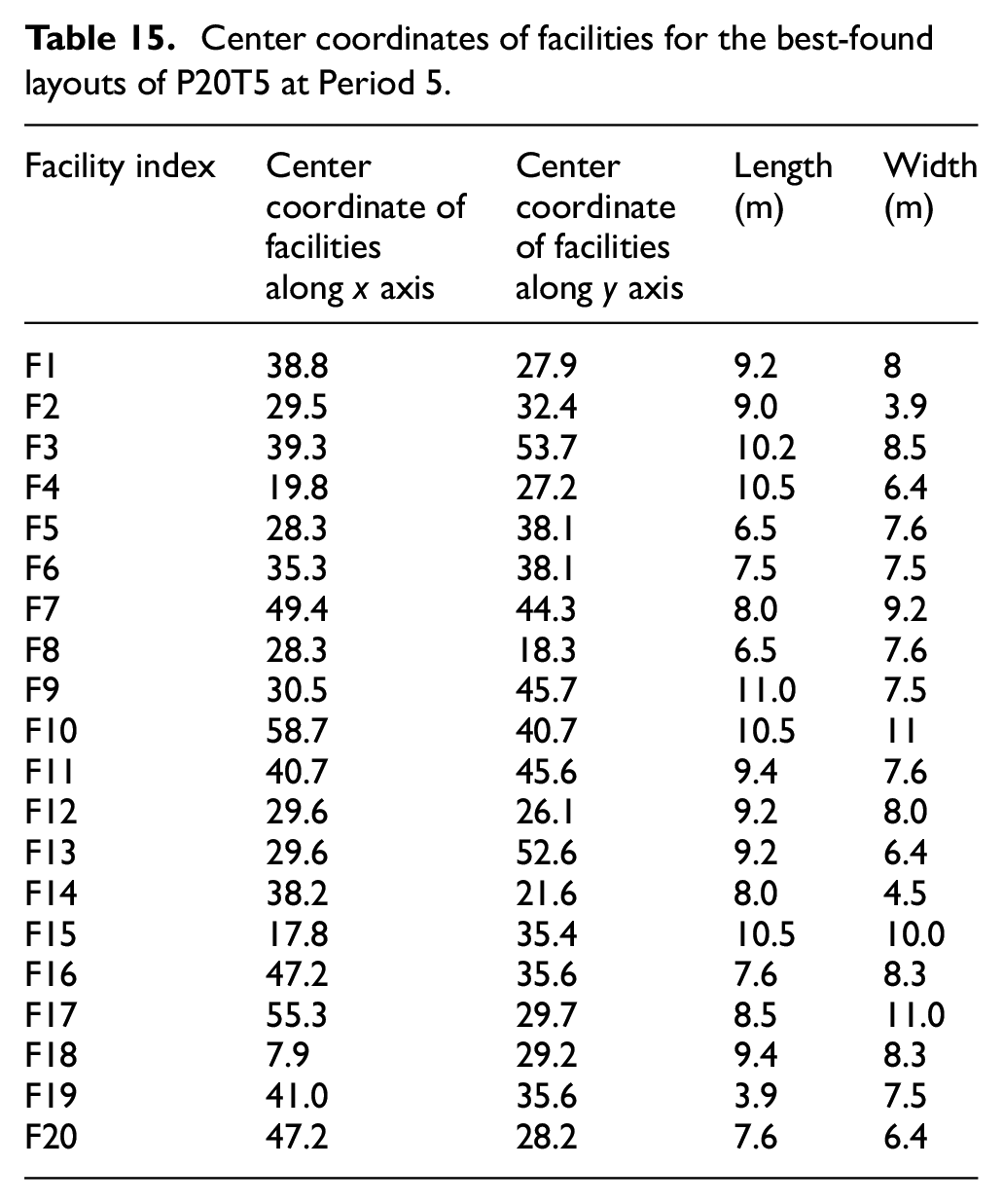
After running the program for over 10 times, the hybrid algorithm reaches a good solution after 1000 iterations on P20T5 problem. Table 13 shows the convergence of the hybrid algorithm on P20T5 problem under fuzzy random environment. It can be seen that the best-found result for P20T5 problems is 452,584.4 with the runtime of 25,651.9 s. The center coordinates of the best-found layout of P20T5 for Period 5 are shown in Table 15. Figure 8 shows the best-found layout of P20T5 for Period 5. By applying the proposed hybrid algorithm, the aforementioned results can provide decision makers with scientific and theoretical references.
Center coordinates of facilities for the best-found layouts of P20T5 at Period 5.
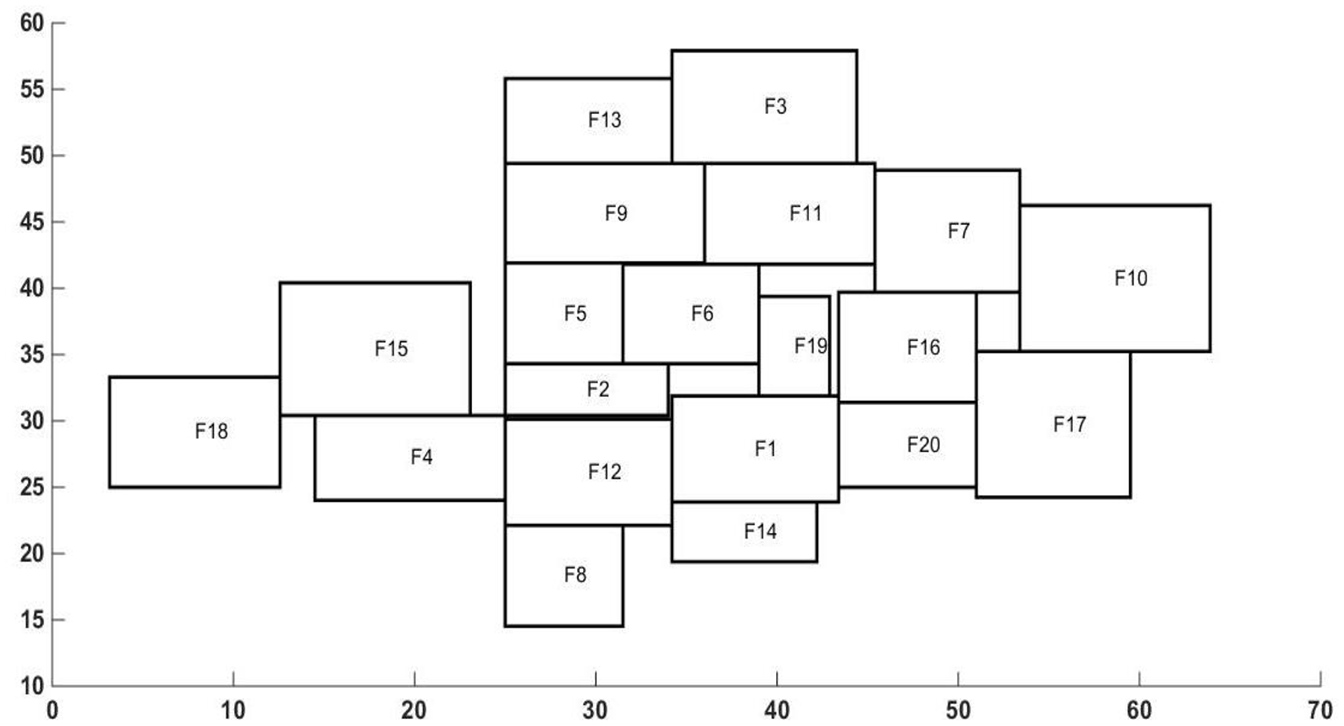
The best-found layout of P20T5 for Period 5.
Comparison with other models
Since the fuzzy random model in this article is formulated with some assumption, there are some possible modeling mistakes. However, the results can be used to help decision makers draw up a theoretical optimal plan. Further research should be done on the basis of the proposed model. To demonstrate the advantages of the proposed model under fuzzy random demand, more computational results are shown by using the same hybrid PSO and SA algorithm to solve DFLPs under deterministic and fuzzy modeling environment, respectively. The first is a DFLPs model with deterministic demand and other is a DFLPs model with fuzzy demand. Deterministic demand means the demand between facilities is a deterministic value. Fuzzy demand means the demand between facilities is a fuzzy value. To ensure its feasibility and reliability, each program runs over 10 times after 1000 iterations under the same MATLAB programming environment. In the deterministic environment, the mean value of each FRV in this case study has been calculated. For instance, for demand
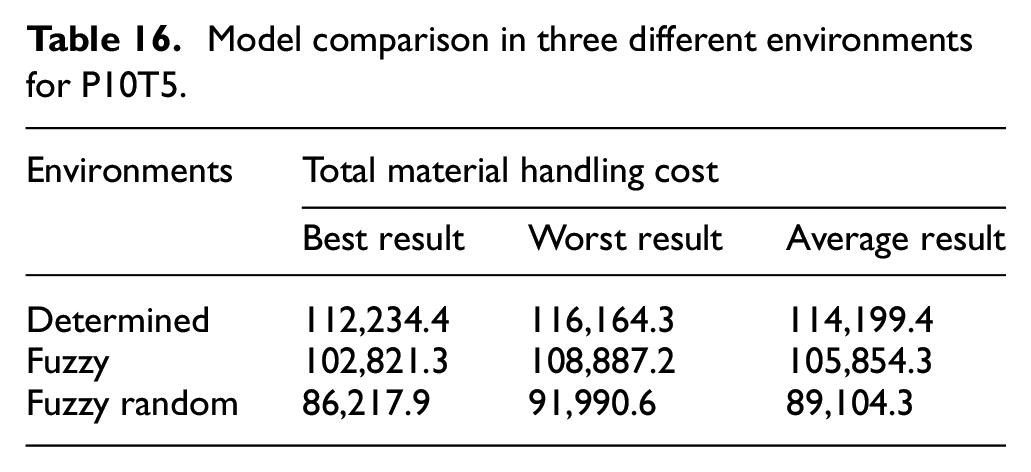
Model comparison in three different environments for P10T5.
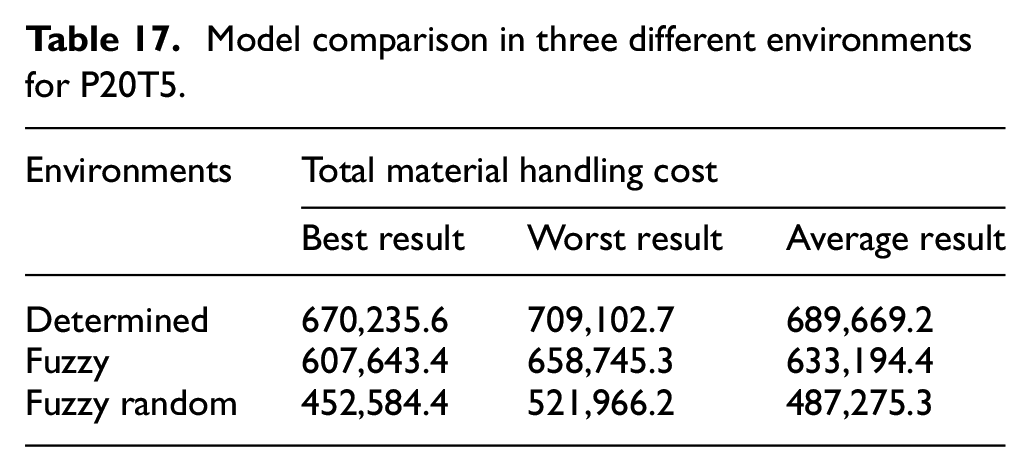
Model comparison in three different environments for P20T5.
In the fuzzy environment, the fuzziness in material demand has been considered but the stochastic nature is neglected. The expectation method is used to convert the fuzzy demand into equivalent crisp demand. For instance, for demand
As the scale of facility increase, rough estimating the range of material demands on the basis of personal experience and taking an average under deterministic environment may produce accumulated errors in the long term. Moreover, according to the comparative results, ignoring the stochastic nature of material demand is infeasible, which expands a gap between the fuzzy environment, and the fuzzy random environment with the scale of the facility increased. Therefore, it can be concluded that the model under a fuzzy random environment is not only closer to reality but also has a better solution than the other two environments, which can minimize total material handling costs and avoid the overlap between facilities.
Conclusion
A new hybrid algorithm was proposed for UA DFLPs under fuzzy random environment. First, the main factors affecting the uncertainty demands are analyzed and the uncertain demands are presented based on fuzzy random theory. Second, a novel formulation of UA DFLPs mathematical model was developed under fuzzy random environment where the unfixed shapes and free orientations of facilities are considered throughout the time horizon. Subsequently, a hybrid PSO and SA algorithm was developed to solve the proposed model, which devotes to save the total material handling costs and prevents the spatial overlapping between adjacent facilities. Moreover, to improve the quality of solution and find a better global solution, this article applied five methods including two swapping methods (facility-swapping method and period-swapping method), two local search methods (local search method 1 and local search method 2) and a shifting method. The four different modified algorithms are compared in two test problems to highlight the performance of the proposed hybrid method. The application of our hybrid algorithm enabled better layouts in stark contrast to other algorithms. Finally, the proposed model and hybrid algorithm are applied to a new aircraft assembly shop floor. To verify the effectiveness of the proposed model, this article compares it with other models including the deterministic model and fuzzy model. The results show that the proposed hybrid algorithm is attractive in terms of both solution quality and computation time under fuzzy random environment.
For future work, this study is to be expanded in many directions. First, more objective is to be considered in DFLPs models such as operational cost, investment cost, human resource, inventory, and safety. Second, it is suggested that the multi-objective dynamic algorithm is to be used for solving DFLPs such as multi-objective imperialist competitive algorithm (MOICA), non-dominated sorting genetic algorithm (NSGAII), MOPSO, and so on. Third, it will further increase the size of facilities to study the accuracy of DFLPs model under fuzzy random environment in the long term.
Footnotes
Declaration of Conflicting Interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the National Natural Science Foundation of China (grant no. 51575274), the National Defense Basic Scientific Research Project (grant no. JCKY2016605B006), and the National Defense Basic Scientific Research Project (grant no. JCKY2016203B083).