
Abstract
Permutation flow shop scheduling is a part of production scheduling problems. It allows “n” jobs to be processed on “m” machines. All the jobs are processed in all the machines, and the sequence of jobs being processed is the same in all the machines. It plays a vital role in both automated manufacturing industries and nondeterministic polynomial hard problem. Gravitational emulation local search algorithm is a randomization-based concept algorithm. It is used iteratively as the local search procedure for exploring the local optimum solution. Modified gravitational emulation local search algorithm is used for both exploring and exploiting the optimum solution for permutation flow shop scheduling problems. In this work, modified gravitational emulation local search algorithm is proposed to solve the permutation flow shop scheduling problems with the objectives such as minimization of makespan and total flow time. The computational results show that the performance solution of the proposed algorithm gives better results than the previous author’s approaches. Statistical tools are also used for finding out a relationship that exists between the two variables (makespan and total flow time) and to evaluate the performance of the proposed approach against the previous approaches in the literature.
Introduction
Scheduling is the allocation of resources applying the limiting factors of time and cost to perform a collection of tasks. 1 In permutation flow shop scheduling, “n” jobs must be processed on “m” machines in the same order. The operation sequence is the same for all jobs. Johnson 2 proposed exact algorithm to optimize makespan (MS) for n jobs with two-machine flow shop problem. Ignall and Schrage 3 solved two-machine and three-machine flow shop scheduling problems using branch-and-bound (B&B) algorithm. Campbell et al. 4 developed a heuristic algorithm for n-job m-machine sequencing problem with an objective of minimizing total elapsed time. Garey et al. 5 reported that if the number of machines m ≥ 3, then the problem is nondeterministic polynomial (NP) hard. A general schedule for n jobs with m machines is (n!)m. In this case, only n! schedules must be considered to avoid job passing. The flow shop scheduling performance measures are MS, total flow time (TFT), tardiness, and so on. MS is the time required to complete the processing of all the jobs in the shop. The minimization of the MS results in an efficient utilization of resources. TFT is the time spent by a job in the system. If the jobs spend less time in the system, then work-in-process inventory is reduced. Nawaz et al. 6 developed a heuristic algorithm for flow shop sequencing problem. The authors compared the result of heuristic algorithm with 15 other algorithms from previous work. They reported heuristic algorithm is suitable for large flow shop problem in both the static and the dynamic sequencing environments.
Most of the researchers concentrate on single objective, but the real-life scheduling decisions involve the consideration of more than one objective at a time. In multi-objective permutation flow shop scheduling, weights are assigned to each objective with respect to its importance. The minimization of MS and TFT leads to the minimization of total production cost and work-in-process inventory. Gelders and Sambanadam 7 proposed four heuristic methods to minimize the sum of weighted tardiness and weighted flow time in flow shop scheduling. Selen and Hott 8 proposed a mixed integer goal programming method to minimize the MS and TFT for n-job m-machine flow shop scheduling. Wilson 9 attempted alternative formulation which involves substantially fewer variables at the expense of an increase in the number of constraints for flow shop scheduling with the same objectives. Rajendran 10 developed heuristic algorithm to solve flow shop scheduling problem with the objective of minimizing the MS and TFT. Later, this algorithm is called as C Rajendran (CR) heuristic heuristic algorithm. Nagar et al. 11 developed combined approach to minimize MS and average TFT. They reported that the combined approach is better than pure genetic algorithm (GA) and pure B&B technique. Chou and Lee 12 used integer programming model to solve two-machine flow shop scheduling problem. The results show that the proposed heuristic algorithm produces optimal solution. Yeh 13 developed an efficient B&B algorithm to minimize a weighted sum of TFT and MS. The author tested randomly generated problem and reported that the efficient heuristic algorithm is more efficient on problem up to 20 jobs. Yeh 14 also proposed memetic algorithm (MA) to solve two-machine flow shop problem. The results are satisfactory when compared with B&B algorithm. Allahverdi 15 proposed three heuristic algorithms for two-machine and m-machine problems with the objective of minimizing the weighted sum of MS and mean flow time. They also developed two dominant relations for two-machine and three-machine problems. Rajendran and Ziegler 16 developed max–min ant system (MMAS) and population-based ant colony optimization (PACO) algorithms to solve flow shop scheduling problem with the objective of minimizing the MS and TFT. They reported that MMAS and PACO algorithms produced 83 best results out of 90 problems.
Ravindran et al. 17 developed hybrid algorithm for multi-criterion (HAMC1, HAMC2, and HAMC3) to minimize the MS and TFT for flow shop scheduling. The results of the problem are compared with CR multi-criterion (MC) heuristics and CR heuristics. 10 Lin and Wu 18 proposed B&B algorithm to minimize the weighted sum of the MS and total completion time for two-machine flow shop. They reported that B&B algorithm produced optimal schedule up to 30 or less jobs. Jarboui et al. 19 developed combinatorial particle swam optimization (CPSO) for solving permutation flow shop problem with the objective of minimizing the MS and the TFT. The authors compared the performance of CPSO with the smallest position value of particle swam optimization (PSOspv), GA, and hybrid CPSO (H-CPSO) for MS. Similarly, they compared the performance of H-CPSO algorithm with Liu and Reeves (LR) heuristic, PACO, max–min ant system (MMAS), and variable neighborhood search PSO (PSOVNS) for TFT. Finally, they reported the performance of H-CPSO better for total time up to 20 jobs and machines varying from 5 to 20. PSOVNS produced better results for 50 jobs and machines varying from 5 to 20. Allouche et al. 20 proposed compromise programming and satisfaction functions for solving multi-objective scheduling problem with the objective of minimizing MS, TFT, and total tardiness. Rajendran and Ziegler 21 proposed multi-objective ant colony optimization (ACO) to produce nondominated solution with the objective of minimizing MS and TFT in permutation flow shop scheduling. Yagmahan and Yenisey 22 proposed multi-objective ant colony system algorithm to minimize the objectives of both MS and TFT. They reported the result better in terms of the performance solution when compared with other heuristics such as GA, HAMC1, HAMC2, HAMC3, and CR (MC). Arroyo and Pereira 23 proposed greedy randomized adaptive search procedure (GRASP)–based heuristic to minimize two and three objectives simultaneously. The authors compared GRASP method with B&B algorithm for bi-objective and multi-objective. They reported that GRASP is a promising approach for multi-objective optimization. Chiang et al 24 proposed an MA to produce Pareto optimal solution for minimizing MS and TFT. The MA produced better performance for large-size problem when compared with small-size problem. Wei et al. 25 developed multi-objective local search (MOLS) combined with nondominated sorting genetic algorithm–II (NSGA-II) for solving permutation flow shop scheduling with the objectives of minimizing MS and maximum tardiness. The authors selected four different scaled problems to test the performance of NSGA-II-MOLS. The comparison shows that the effectiveness of NSGA-II-MOLS is better than that of the previous work. Balasundaram et al. 26 proposed decision tree (DT) algorithm to minimize MS and TFT in flow shop scheduling. They conducted statistical tests to validate the solution quality and reported that DT algorithm is better than HAMC1, HAMC2, HAMC3, and CR (MC) algorithms. In this article, modified gravitational emulation local search (MGELS) algorithm is proposed to minimize both MS and TFT. The proposed algorithm is tested with the benchmark problems, and the performance of MGELS algorithm is compared with CR algorithm, HAMC1, HAMC2, HAMC3, CR (MC), multi-objective adaptive clonal selection algorithm (MOACSA), GA, and DT algorithm.
This article is organized as follows: it describes the permutation flow shop scheduling problem and the mathematical model; explicates about the gravitational emulation local search (GELS) algorithm, MGELS algorithm, and its procedure; and reports the computational results of MGELS algorithm and comparison with other existing heuristics. Finally, the conclusion is given.
Problem descriptions
In permutation flow shop scheduling, n jobs are processed on m machines, and the job sequence is the same in all the machines. The objective is to optimize MS and TFT. The following assumptions are considered in this problem:
All jobs are available for processing at time 0;
Each job is processed on at least one machine at a time;
Machine cannot process two jobs at the same time;
No pre-emption of operation is allowed;
Setup times are sequence independent;
Setup times are included in the processing times;
Machines may be idle.
Mathematical model
In this article, the objective is to minimize the MS and TFT in permutation flow shop scheduling. The combined objective function is represented as


MS (f1)

TFT (f2)

Completion time C(πi, j)




GELS algorithm
GELS algorithm is an intelligent explore method for combinatorial optimization problems. Voudouris and Tsang 27 initiated the guided local search (GLS) algorithm for solving NP-complete problems. Webster 28 developed GELS algorithm to localize optimal solutions for difficult problems. GELS is based on a randomization concept and two parameters (velocity and position), and it uses random numbers from a local search algorithm to prevent local optimum solutions. The key attribute of this algorithm is the iterative use of a local search. In this algorithm, more gravitational force is found on heavier objects, and so, it attracts lighter objects. The distance between the two objects influences this gravitational force according to Newton’s law of universal gravitation in equation (9)

where M1 is the mass of object 1, M2 is the mass of object 2, G is the gravitational constant (6.672), 29 and R is the distance between the two objects.
Each object or solution has a mass. No object has zero mass. The highest mass is the best solution. If there are two objects with same weights and different distances from a lighter object, the object closer to a lighter object will have more gravitational pull on the lighter object. The parameters “m” and “a” are calculated for each mass. All the initial velocity vector elements become zero when it reaches the maximum iteration. GELS algorithm features are used in many fields such as traveling salesman problem, 29 active sensor selection, 30 set covering problem, 31 and job shop scheduling problem. 32
The procedure for the proposed algorithm is as follows:
Step 1. Generate the current solutions (initial sequences) randomly. Assume the number of agent (object) is equal to the population size

Step 2. Evaluate the fitness value for each agent

Step 3. Update the G, best fit, and worst fitness value

Step 4. Calculate the mass for each agent

Mass of agent must be normalized

Step 5. Calculate attractive force.
The initial solution is a current solution (CU). It is produced randomly. The force required to attract lighter body by heavier body is shown in equation (11). Masses are replaced by candidate solutions, and current solution is arrived from equation (9) by replacing masses.CU is the current sequence for agent 1 and CA is the candidate sequence for agent 2

where Rij is the Euclidian distance between the two agents i and j

Step 6. Calculate the acceleration of an agent

Step 7. Update velocity of an agent


Step 8. Find the new position

Step 9. Obtain the best solution
The initial population is created randomly and evaluates each mass. Calculate the fitness value of each agent. Then, G, best, and worst values are updated. The parameters m and a are calculated for each mass. Then, the velocity of each mass is calculated. New location of each mass is updated using velocity factor. Finally, the algorithm will be terminated if the maximum number of iterations meets or all the initial velocity vector elements become zero. Otherwise, the algorithm goes back to step 2 and continues until the optimal answer reaches. The flowchart of GELS algorithm is shown in Figure 1. The GELS accessible parameters are as follows: 33
Radius. It is calculated using gravity calculation formula;
Maximum velocity. Assigned maximum velocity value for each agent;
Iteration. Algorithm will terminate, after the maximum number of iteration is reached.
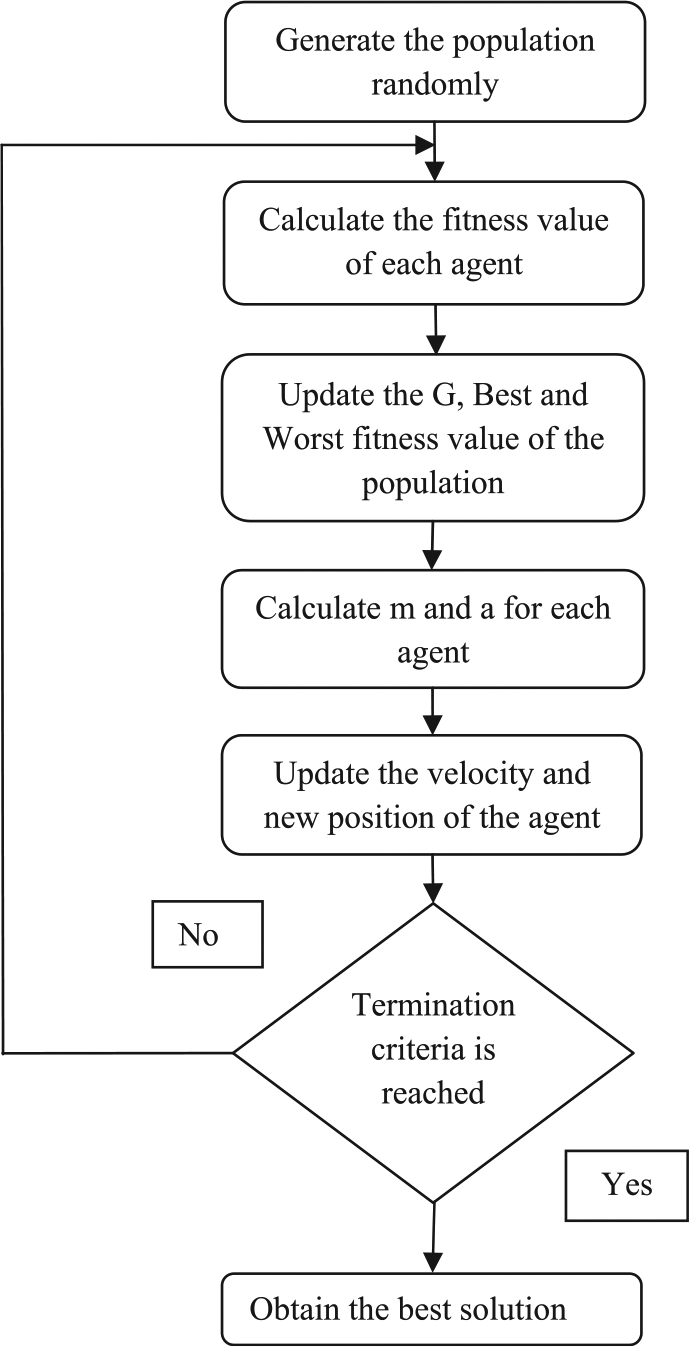
Flowchart of GELS algorithm.
Proposed method
In the proposed method, some modifications to the above GELS algorithm have been made for the MGELS algorithm as described below.
The fitness value of the new sequence is calculated and compared with the fitness value of the parent sequence. The sequence having the best fitness value becomes the input for the next iteration, and the worst fitness value sequence is replaced by the randomly generated sequence. Therefore, the worst solutions in the population will be replaced by the best solution of the perturbations in the current population. The flowchart of MGELS algorithm is shown in Figure 2.
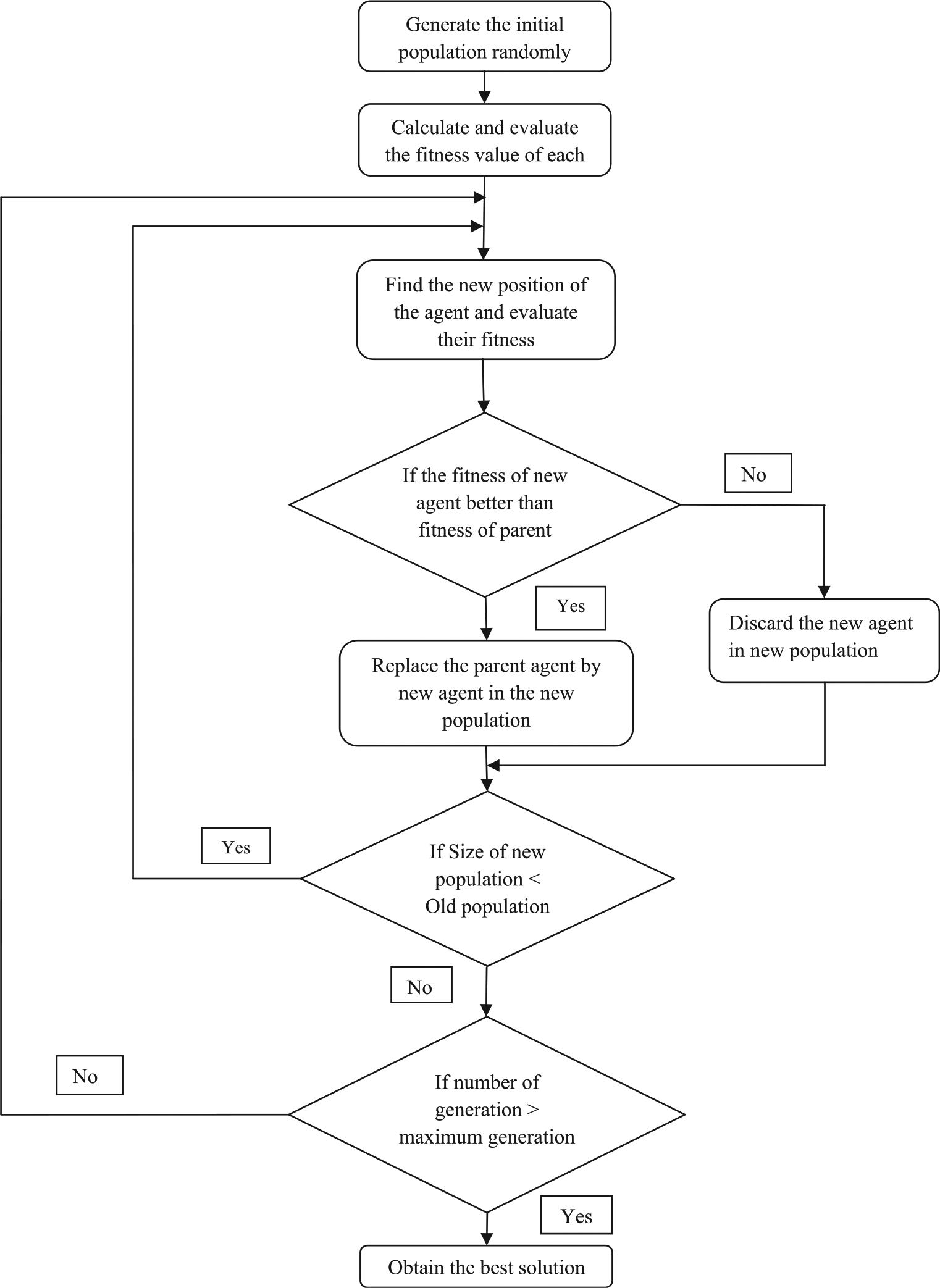
Flowchart of MGELS algorithm.
Computational results
In this article, the MGELS algorithm procedure has been implemented in Java environment on a personal computer with Centrino Duo 1.0-G CPU. It has been tested with 28 benchmark problems with varying jobs (20, 50, and 100) and machines (5, 10, and 20). These benchmark problems are adopted from Taillard. 34 Each instance can be characterized by the following parameters: number of jobs (n) and number of machines (m). Each instance has been tested for 10 times to find the best solution. The performance analysis of the MGELS algorithm is reported in Table 1. Equal weights are considered for each objective (α = 0.5 and β = 0.5) because the reason for MS and TFT objectives are conflicting in nature. The equal weights are considered in Balasundaram et al. 26 and Yagmahan and Yenisey. 22 The combined objective function value (COFV) is calculated using the formula

Performance analysis of the proposed MGELS algorithm method with the existing methods.
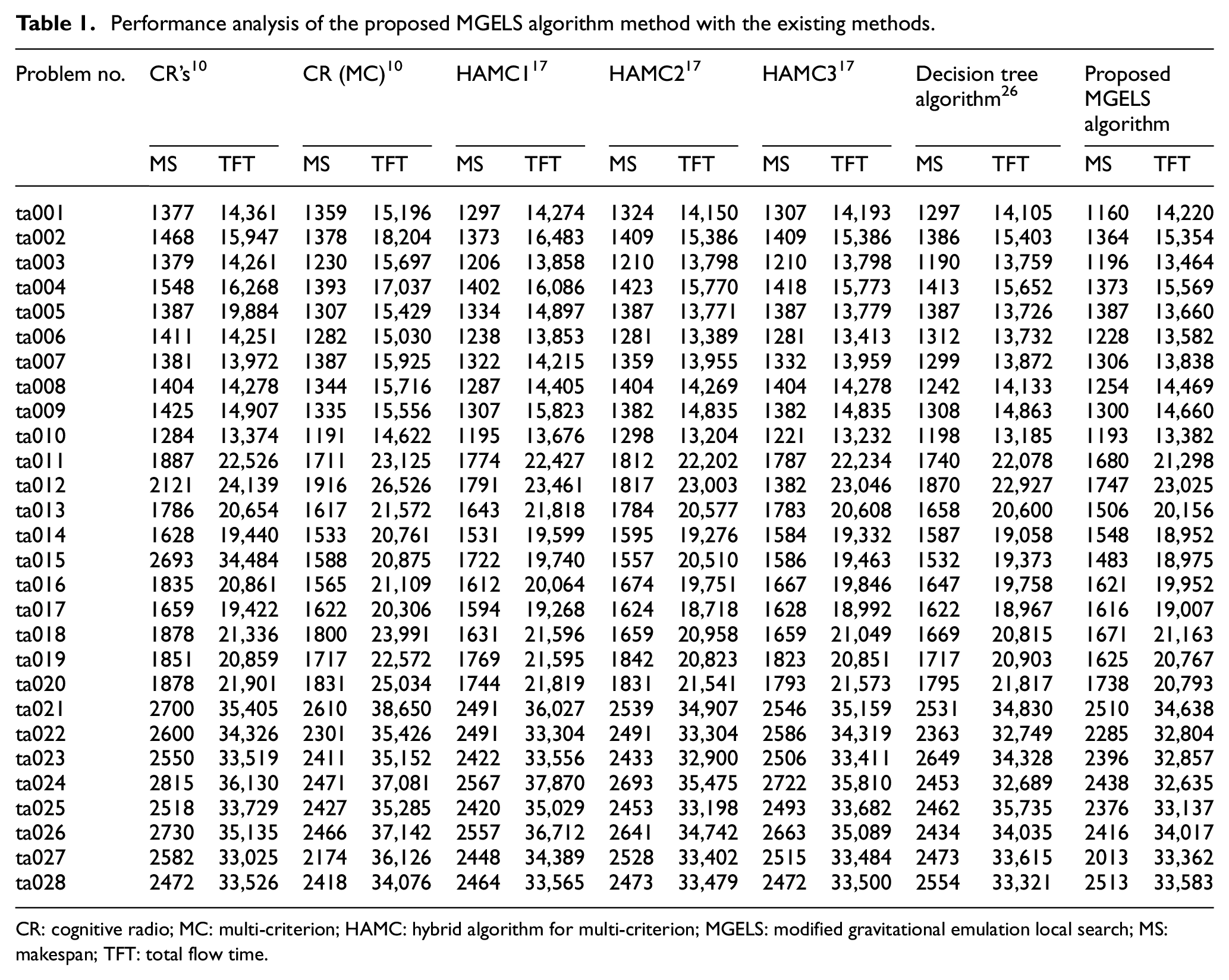
CR: cognitive radio; MC: multi-criterion; HAMC: hybrid algorithm for multi-criterion; MGELS: modified gravitational emulation local search; MS: makespan; TFT: total flow time.
The COFV is calculated, and it is mentioned in Table 2. MGELS algorithm produced 20 best solutions, whereas DT algorithm produced 5 best solutions. HAMC3 produced one best solution, and HAMC2 produced two best solutions. The average COFV is represented in Figure 3.The performance of the algorithms is found out using relative error percentage (REP) equation

Combined objective function values.
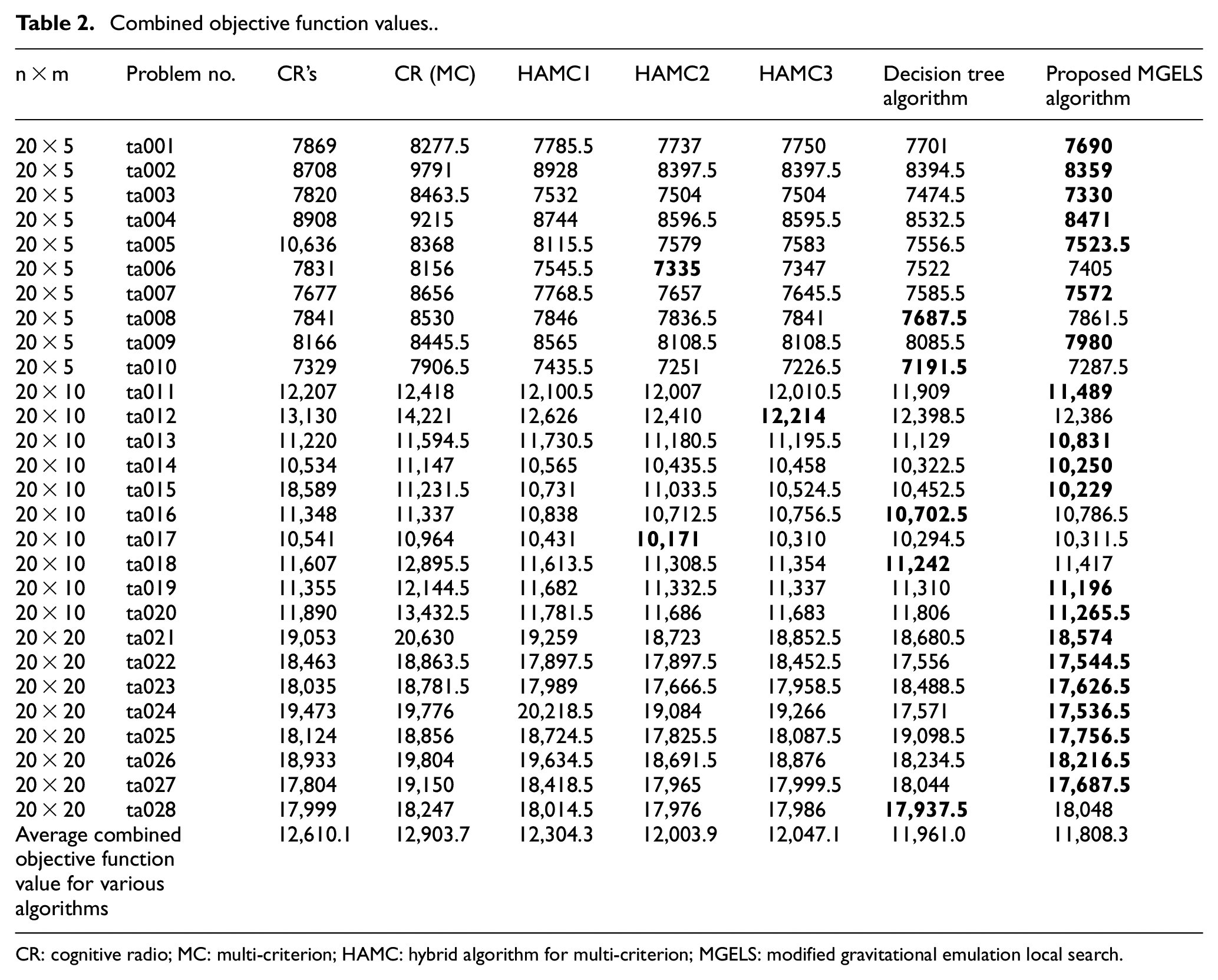
CR: cognitive radio; MC: multi-criterion; HAMC: hybrid algorithm for multi-criterion; MGELS: modified gravitational emulation local search.
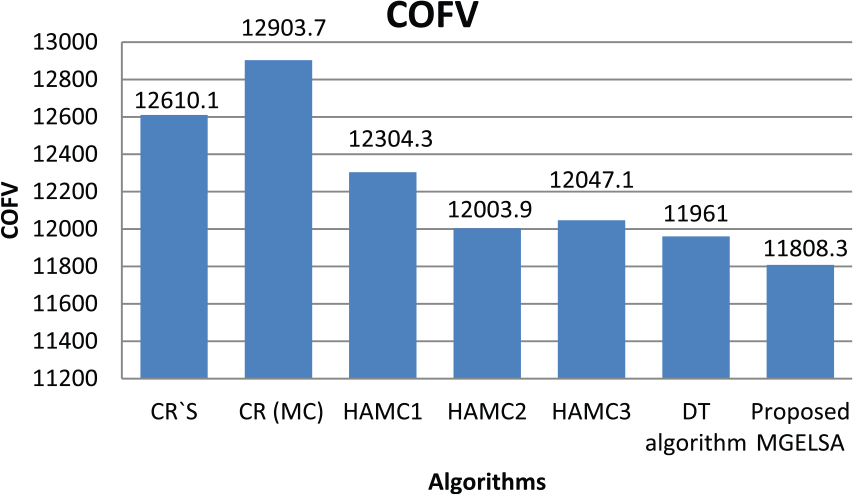
Combined objective function value for various algorithms.
The performance solutions of the proposed MGELS algorithm with CR’s algorithm, HAMC1, HAMC2, HAMC3, CR (MC), and DT algorithm and for MS, TFT, and combined objective are presented in Tables 3–5, respectively.
Performance solutions of algorithms for makespan objective.
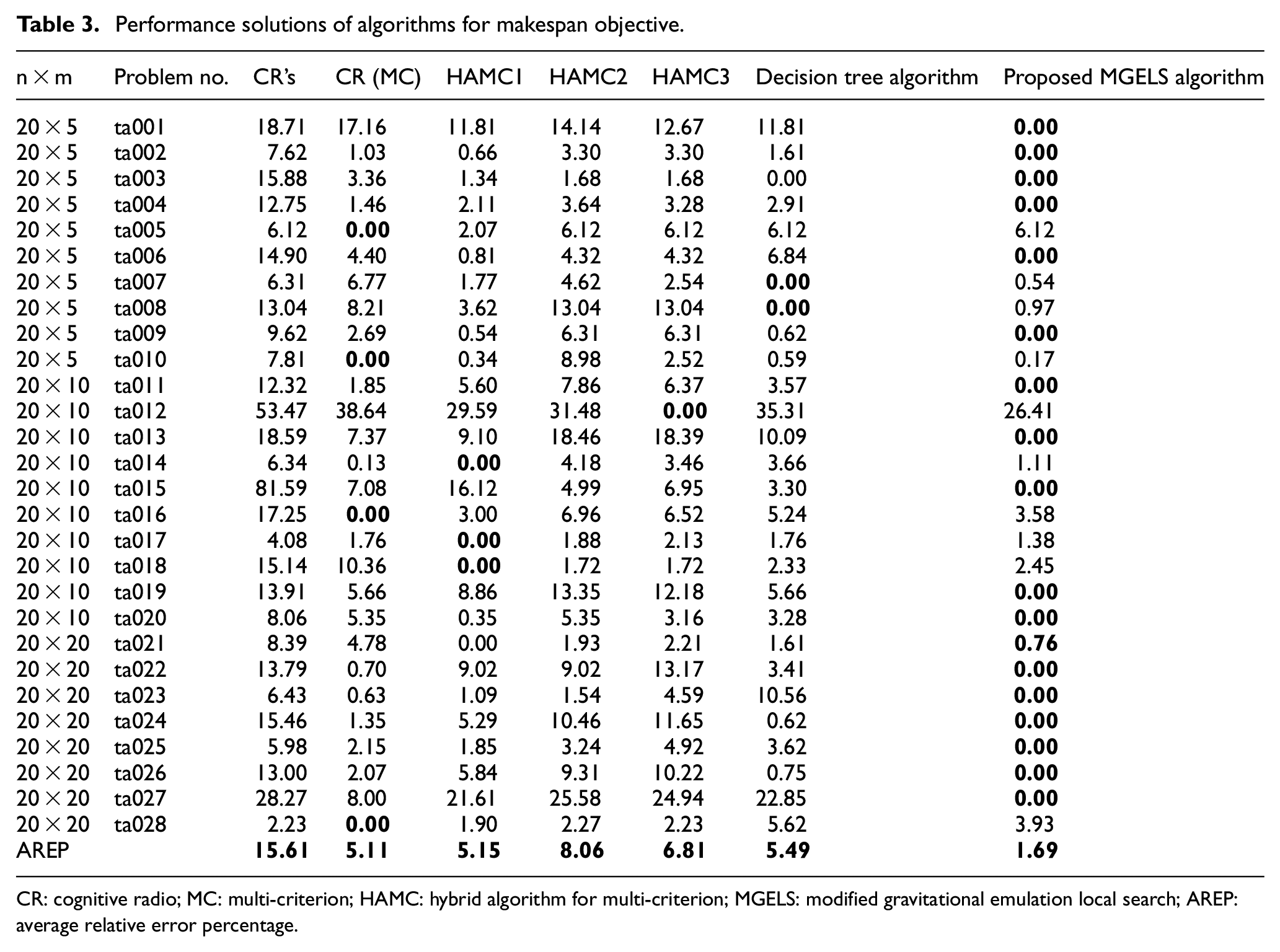
CR: cognitive radio; MC: multi-criterion; HAMC: hybrid algorithm for multi-criterion; MGELS: modified gravitational emulation local search; AREP: average relative error percentage.
Performance solutions of algorithms for total flow time objective.
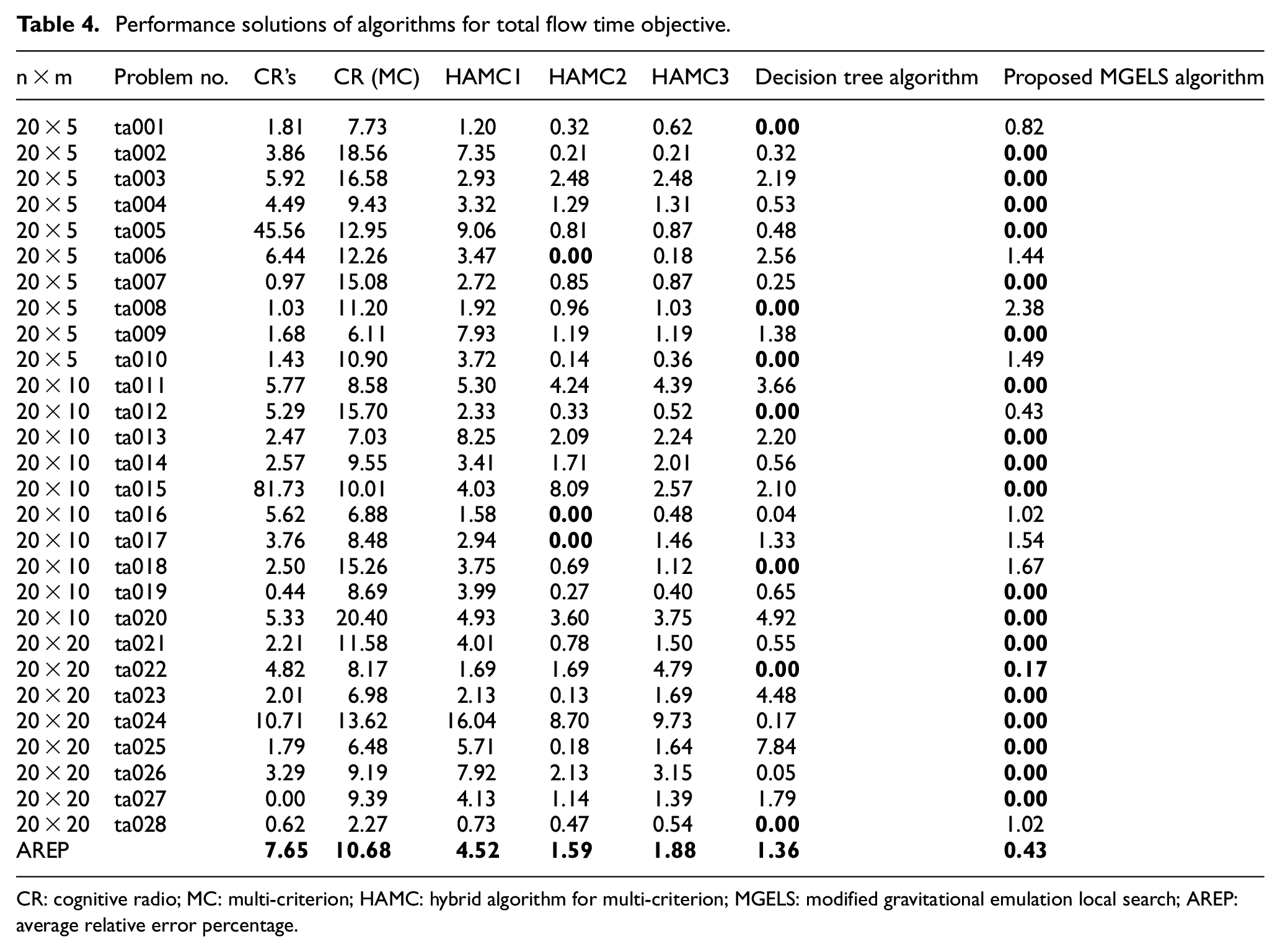
CR: cognitive radio; MC: multi-criterion; HAMC: hybrid algorithm for multi-criterion; MGELS: modified gravitational emulation local search; AREP: average relative error percentage.
Performance solutions of algorithms for combined objective function.
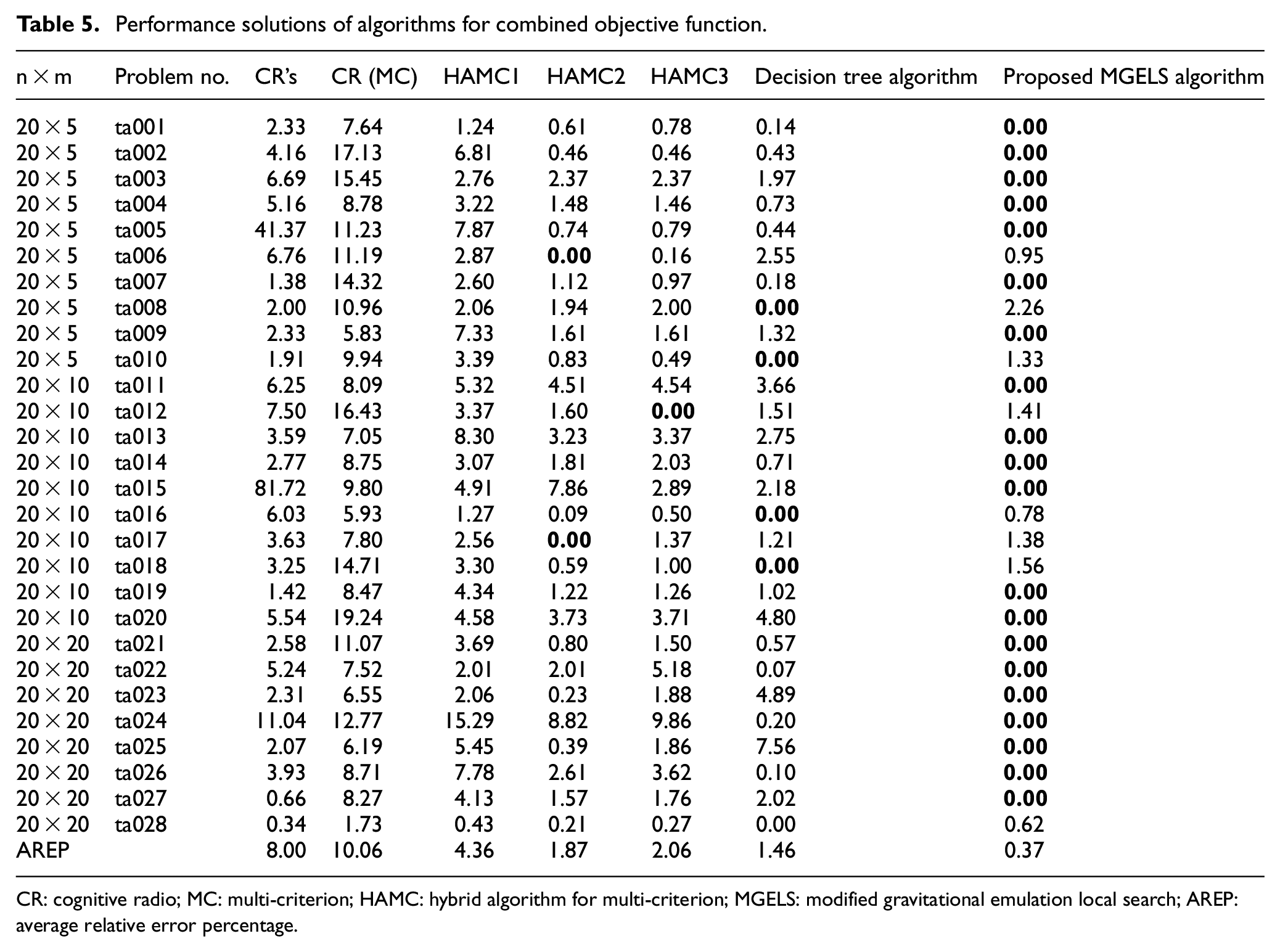
CR: cognitive radio; MC: multi-criterion; HAMC: hybrid algorithm for multi-criterion; MGELS: modified gravitational emulation local search; AREP: average relative error percentage.
Considering MS as an objective, 28 benchmark problems have been solved. Out of these problems, the MGELS algorithm gives zero REP for 17 problems in Table 3. Moreover, the average REP (AREP) of the proposed MGELS algorithm is also (1.69) lesser than that of all other approaches such as DT algorithm, HAMC3, HAMC2, HAMC1, CR (MC), and CR’s, as shown in Figure 4. The result of the previous method 22 is shown in Figure 5. From these figures, it is clear that MOACSA and GA produce better result when compared with MGELS algorithm for MS.
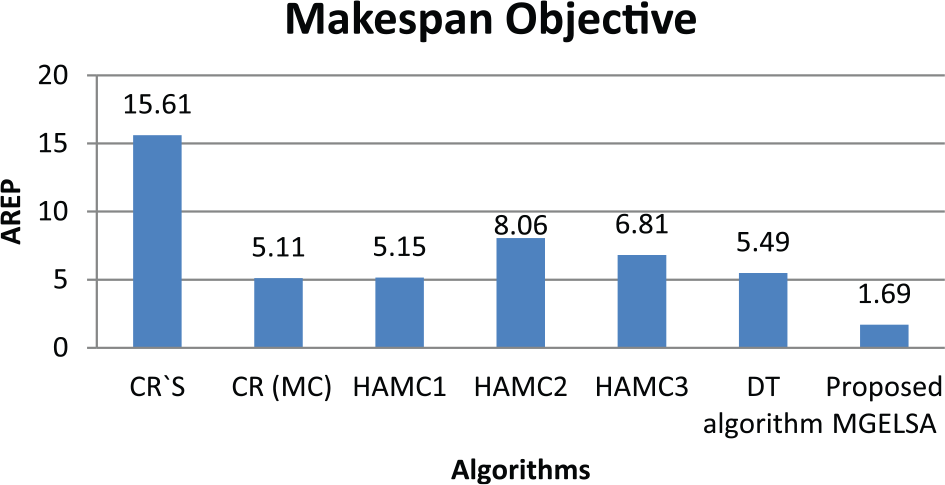
AREP of MGELS algorithm for makespan.
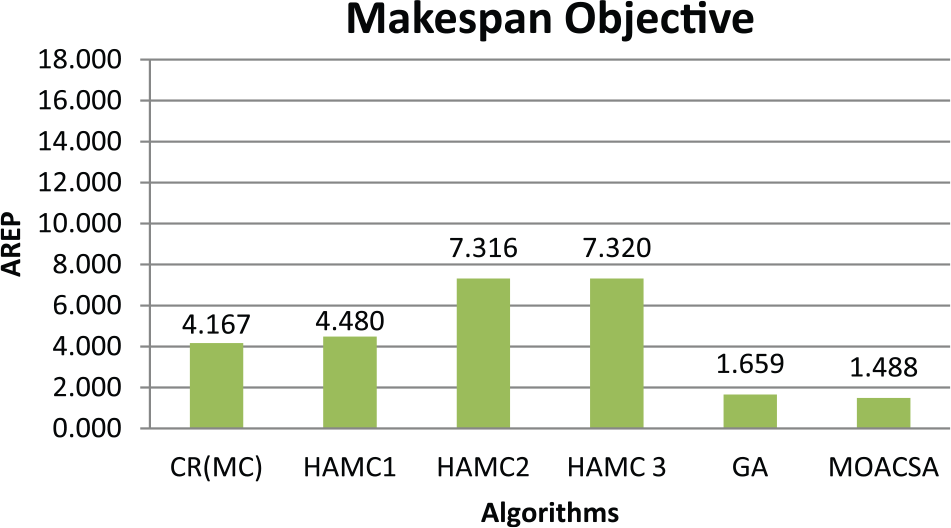
AREP of MOACSA for makespan.
In the same way, the proposed MGELS algorithm is tested with TFT as an objective. Out of 28 problems, MGELS produces zero REP for 18 problems inTable 4. The AREP of MGELS algorithm is 0.43. Now, MGELS algorithm produces good result when compared with DT algorithm, HAMC3, HAMC2, HAMC1, CR (MC), and CR’s, as shown in Figure 6. MGELS algorithm performs better than the other methods such as MOACSA and GA for TFT, as shown in Figure 7.
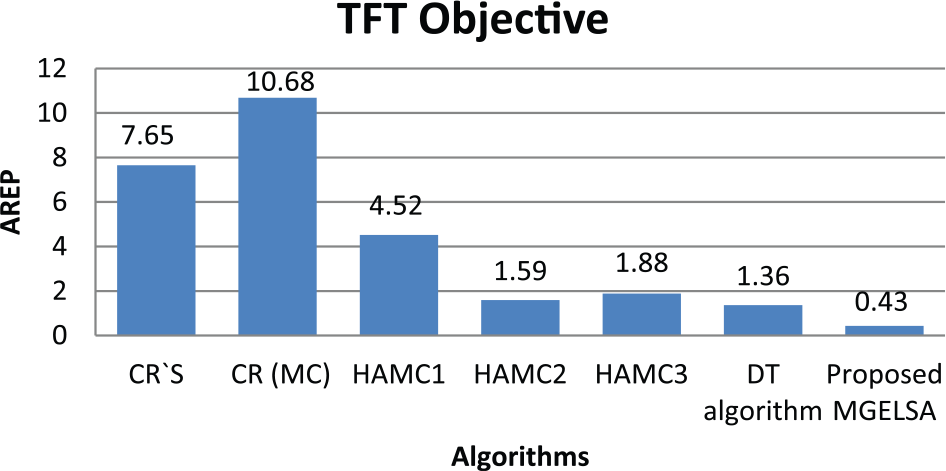
AREP of MGELS algorithm for TFT.
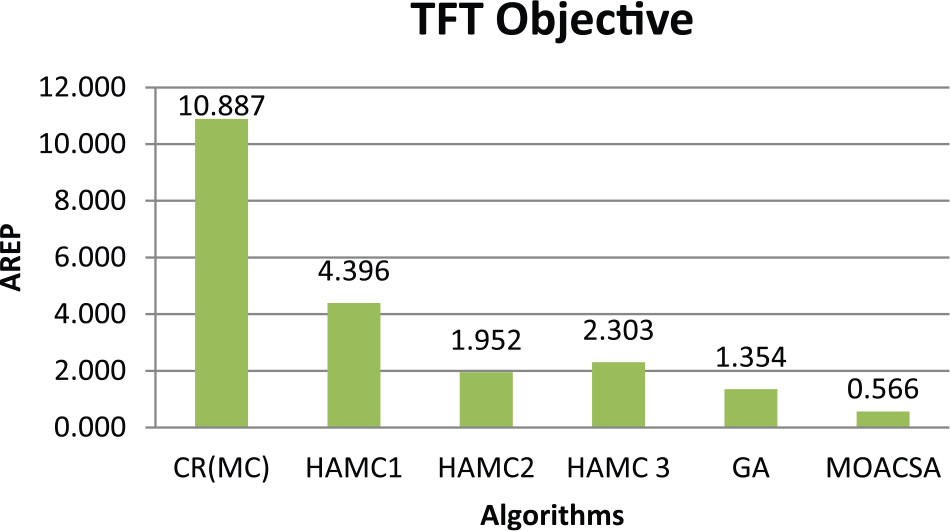
AREP of MOACSA for TFT.
Moreover, the proposed algorithm is tested with MCs, that is, combined objective function of MS and TFT. Consider the two objectives are equal weight factor (0.5). Even now, it performs better than other approaches. Out of 28 problems, MGELS algorithm gives zero REP for 20 problems compared with CR’s algorithm, CR (MC), HAMC1, HAMC2, HAMC3, and DT algorithm, as shown in Table 5. CR’s and HAMC2 do not produce zero AREP in 28 problems, which is shown in Figure 7. The AREP of MGELS algorithm is 0.37, as shown in Figure 8. It gives a better result when compared with MOACSA (0.564) and GA (1.266), as shown in Figure 9.
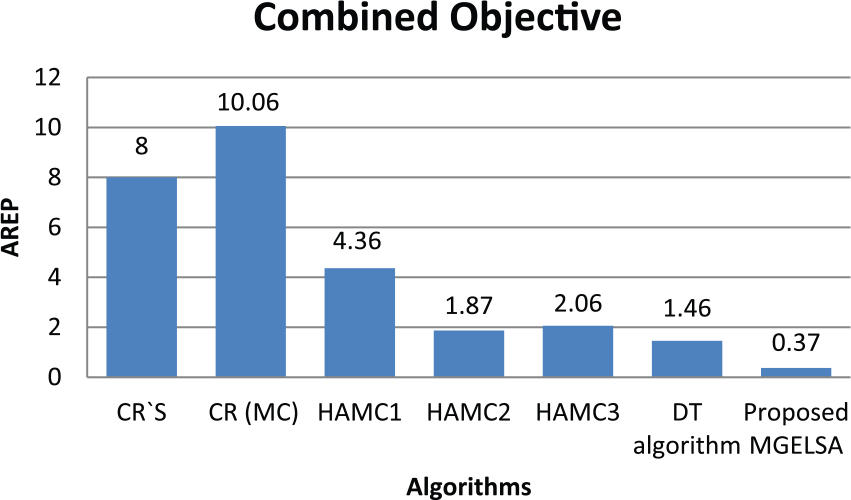
AREP of MGELS algorithm for COFV.
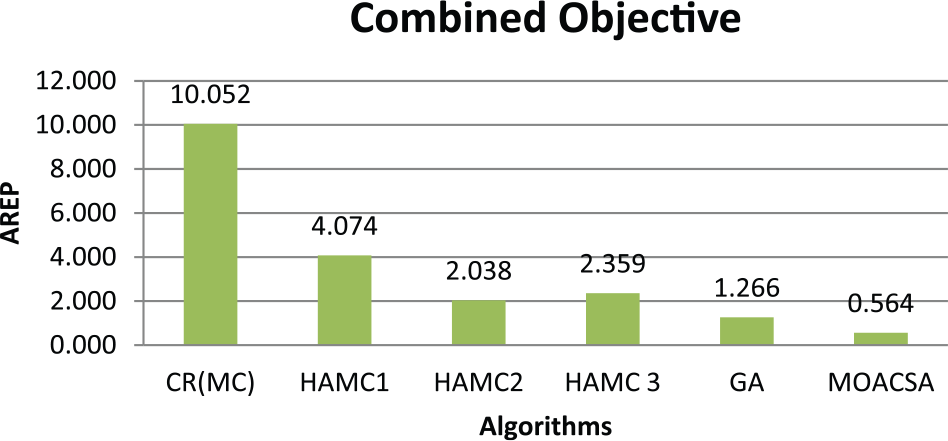
AREP of MOACSA for COFV.
The comparison of average COFV is shown in Table 6. For jobs (20, 50, 100) and machines (5, 10, 20), MGELS algorithm yields better results when compared with other approaches. MOACSA and GA values are not compared because their results are represented in performance solution.
Comparison summary of the performance of the proposed MGELS algorithm for 20, 50, and 100 job problems.
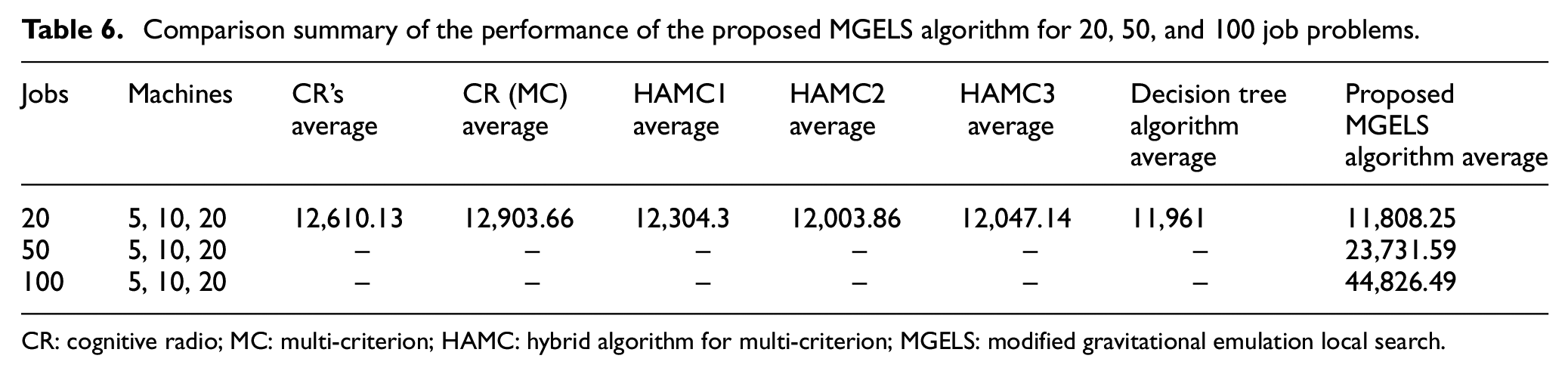
CR: cognitive radio; MC: multi-criterion; HAMC: hybrid algorithm for multi-criterion; MGELS: modified gravitational emulation local search.
The “t” test is conducted for evaluating the performance of MGELS algorithm. The t test 35 to be evidenced for the statistical significance of the better results is arrived by the proposed method when compared with other algorithms. Calculate the mean and standard deviation of the differences in MS and TFT for each problem size. Now, test the hypothesis that the population corresponding to the differences has mean µ = 0. Specifically, (null) hypothesis µ = 0 is against the alternative one µ > 0. Assume that the MS difference is a normal random variable and choose the significance level α = 0.05. If the hypothesis is true, the random variable is

where t is the test, N is the sample,
From standard tables of t-distribution, for degrees of freedom (N − 1), c-value at 0.05 levels is 1.833. The calculated (t) value 6.347 is greater than table value 1.833 for MS in CR’s algorithm. From Table 7, it is seen that for 20 × 5 problems, six significant values are obtained. For 20 × 10 problems, eight significant values are obtained, as shown in Table 8. A total of nine significant values are obtained from 20 × 20 problems, as shown in Table 9. It is concluded that the difference is statistically significant. The proposed method solution is statistically significant when compared with other methods.
Statistical test of significance between proposed MGELS algorithm and existing algorithms for 20 × 5 problems.
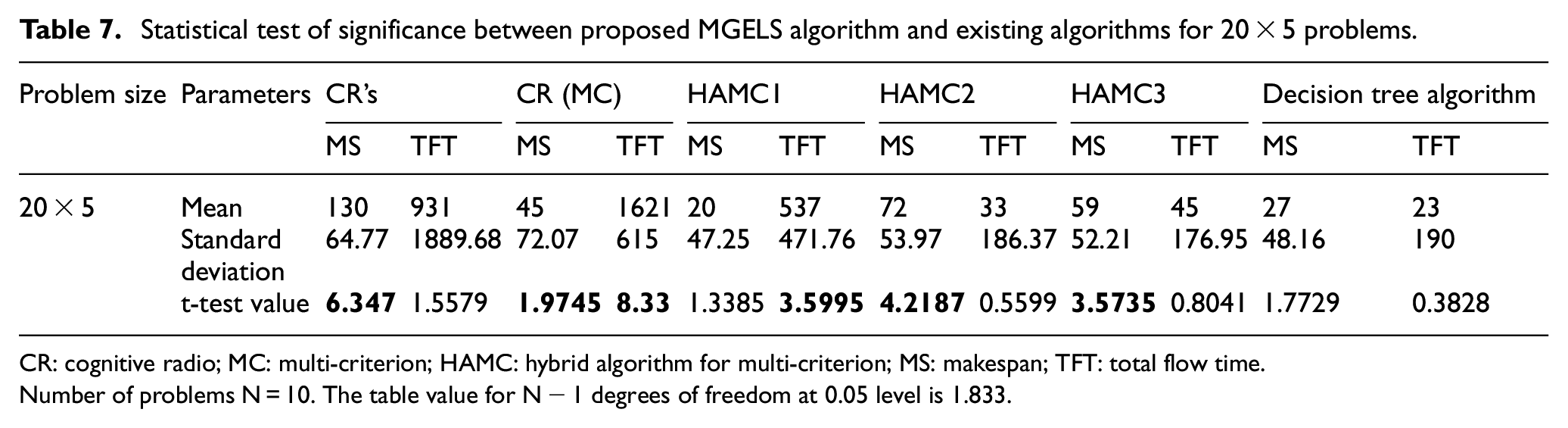
CR: cognitive radio; MC: multi-criterion; HAMC: hybrid algorithm for multi-criterion; MS: makespan; TFT: total flow time.
Number of problems N = 10. The table value for N − 1 degrees of freedom at 0.05 level is 1.833.
Statistical test of significance between proposed MGELS algorithm and existing algorithms for 20 × 10 problems.
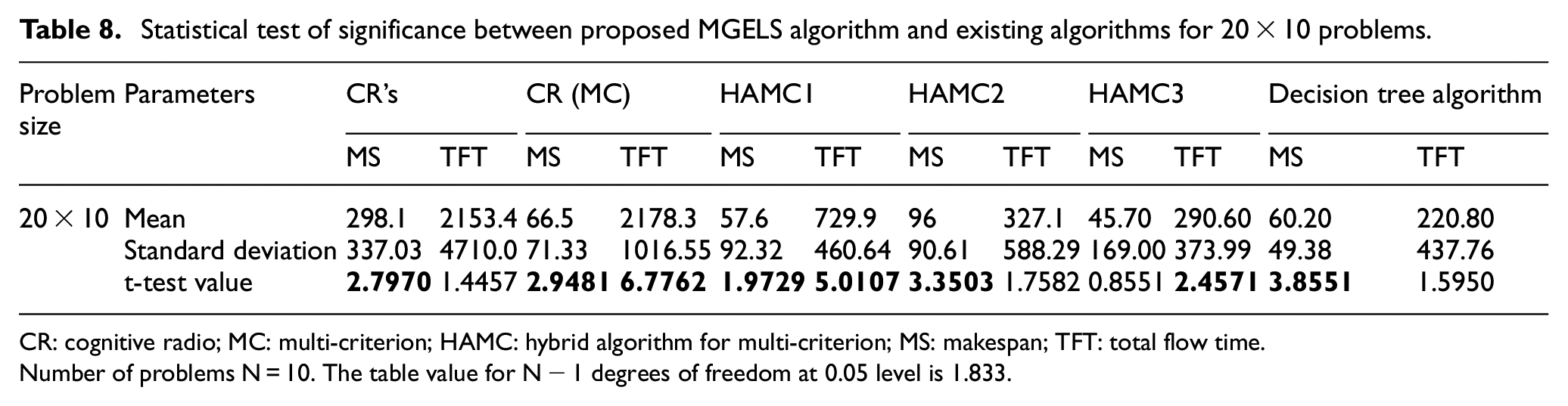
CR: cognitive radio; MC: multi-criterion; HAMC: hybrid algorithm for multi-criterion; MS: makespan; TFT: total flow time.
Number of problems N = 10. The table value for N − 1 degrees of freedom at 0.05 level is 1.833.
Statistical test of significance between proposed MGELS algorithm and existing algorithms for 20 × 20 problems.
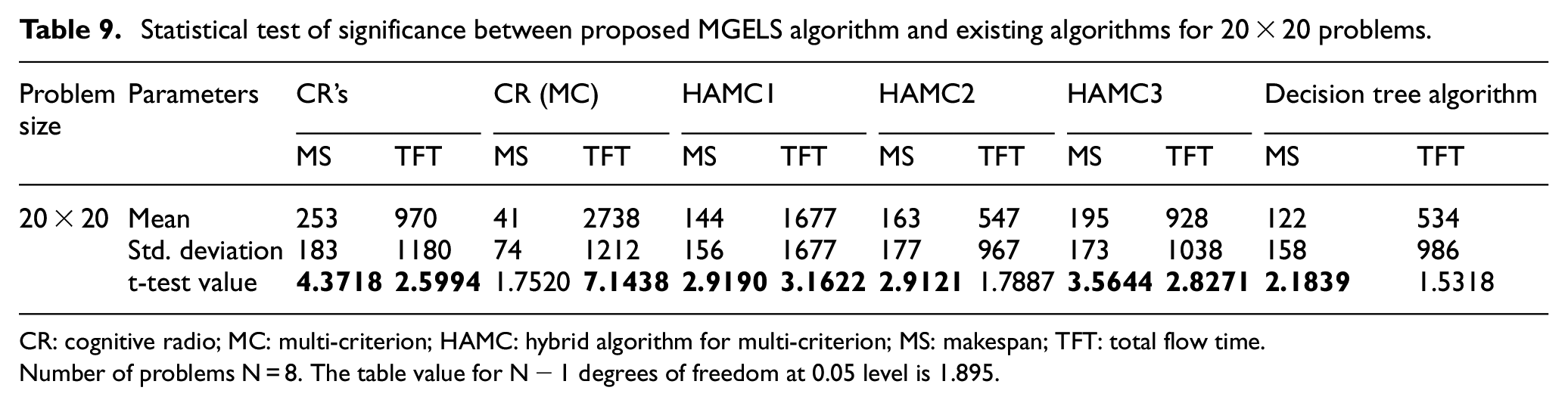
CR: cognitive radio; MC: multi-criterion; HAMC: hybrid algorithm for multi-criterion; MS: makespan; TFT: total flow time.
Number of problems N = 8. The table value for N − 1 degrees of freedom at 0.05 level is 1.895.
Conclusion
This article presents a new meta-heuristic approach of MGELS algorithm to solve the MC permutation flow shop scheduling problems. In order to verify the performance of MGELS algorithm, it is applied to solve various benchmark problems. Already, many researchers have solved MC permutation flow shop scheduling problem with other approaches such as CR’s algorithm, HAMC1, HAMC2, HAMC3, CR (MC), and DT algorithm. But they have not achieved better results because some algorithms do not give zero REP even for single problem. Hence, MGELS algorithm has been proposed to solve the benchmark problems. Finally, our proposed MGELS algorithm produced better results and achieved zero REP for more problems while considering single and multi-objective. The comparative computational results show that the proposed MGELS algorithm is more suitable for solving permutation flow shop scheduling problem with minimization of MS, TFT, and combined objective.
In future, it could be added with more objectives such as machine idle time, total tardiness, total work load, and so on. Moreover, to solve permutation flow shop scheduling problems with other hybrid approaches is also more interesting. In addition, the MGELS algorithm could be applied to solve other combinatorial problems such as layout problems, job shop scheduling, 36 flexible job shop scheduling, manufacturing cell problems, 37 no-wait flow shop scheduling problems, 38 and flexible manufacturing system scheduling problems.
Footnotes
Appendix 1
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.