
Abstract
Assembly sequence planning is a critical step of assembly planning in product digital manufacturing. It is a combinational optimization problem with strong constraints. Many studies devoted to propose intelligent algorithms for efficiently finding a good assembly sequence to reduce the manufacturing time and cost. Considering the unfavorable effects of penalty function in the traditional algorithms, a new discrete firefly algorithm is proposed based on a double-population search mechanism for the assembly sequence planning problem. The mechanism can guarantee the population diversity and enhance the local and global search capabilities by using the parallel evolution of feasible and infeasible solutions. All parts composed of the assembly are assigned as the firefly positions, and the corresponding movement direction and distance of each firefly are defined using vector operations. Three common objectives, including assembly stability, assembly polymerization and change number of assembly direction, are taken into account in the fitness function. The proposed approach is successfully applied in a real-world assembly sequence planning case. The sizes of feasible and infeasible populations are adequately discussed and compared, of which the optimal size combination is used for initializing the firefly algorithm. The application results validate the feasibility and effectiveness of the discrete double-population firefly algorithm for solving assembly sequence planning problem.
Keywords
Introduction
Assembly planning is an important part of process planning in a digital manufacturing system, which generally consists of assembly modeling, assembly sequence planning (ASP) and assembly path planning. 1 ASP is the core step which largely determines the assembly cost and efficiency of a product.2,3 The traditional ASP methods are experience-based methods or accurate calculation methods. 4 Complex product assembly will bring out combinatorial explosion because exponential growth relationships generally exist between assembly sequence number and part number.5,6 These methods cannot work out the optimum solution for solely relying on experiences or perhaps have too high computational complexities for generating the global optimum solution. 7
Many recent studies tried to apply different intelligent algorithms for automated solving of the ASP problem. Cem 8 presented a neural network which has three layers with recurrent structure for analyzing assembly sequences of assembly systems. Chen et al. 9 proposed an artificial neural network algorithm to transform the assembly geometrical constraints into the assembly precedence relationships for overcoming the combination explosion problems. Ong et al. 10 presented a simulated annealing algorithm for the ASP problem, which has strong local search ability. However, its global search ability and total operational efficient are not high for the ASP of complex products. Lazzerini and Marcelloni 11 and Guan et al. 12 used genetic algorithm (GA) for identifying the optimum assembly sequence. In order to solve the ASP problem more efficiently using GA, Lu et al. 13 developed a multi-objective GA and established different fitness functions through a fuzzy weight distribution algorithm. Zhou et al. 14 proposed a bacterial chemotaxis (BC)–based GA, of which BC can keep the diversity of populations during algorithm evolution process. Furthermore, Xing and Wang 15 proposed a new social radiation algorithm (SRA) for assembly operation optimization of autobody based on a linear variation analysis model. The results show that the optimization performance of SRA is better than that of the standard GA.
Swarm intelligence algorithms have the characteristics of higher operation simplicity, more appropriate for parallel processing and higher robustness, which have also been applied to the ASP fields. Wang et al. 16 applied the ant colony optimization algorithm to solve the assembly sequence. Particle swarm optimization (PSO) algorithm has powerful global search ability and convergence efficiently. Wang et al. 17 tried to use PSO algorithm to solve the ASP of complex products under multiple stations and achieved good results. Lv and Lu 18 presented an ASP approach with a discrete PSO algorithm. However, the optimization results of the discrete PSO are easily affected by the individual optimal fitness value. Zhang et al. 19 proposed an immune PSO algorithm to solve ASP of a certain type of product, of which objective function is the combination of geometric feasibility and coherence. The manufacturing and assembly operations for producing a product may be distributed at different plants in a collaborative manufacturing system. Considering this issue, Tseng et al. 20 presented a multi-plant ASP model integrating ASP and plant assignment using a PSO algorithm. All the applications showed a good optimization performance of swarm intelligence algorithms in the ASP fields.
Firefly algorithm (FA) is a latest achievement in the swarm intelligent fields. FA is more efficient and has higher success rate than the GA and PSO algorithm on finding the global optimal solution as well as the local solution simultaneously and effectively through different experiments. 21 Moreover, FA is simple and easy to carry out, which does not need adjustment of many parameters. The algorithm has been successfully applied in the combinatorial optimization problems, for example, optimization of product family design 22 and ASP, 23 which demonstrate its great potentials in solving the nondeterministic polynomial-time (NP)-hard problems.
The ASP problem has strong constraints, 24 and the existing swarm intelligence algorithms generally use penalty functions to deal with these constraints during their evolution process.13,17,23 The penalty function cannot fully consider the treatment of constraint boundary and choice difficulty of penalty factor, which have great negative impacts on searching the global optimum solution as follows:
The methods do not adequately consider the handling of constraint boundaries. However, many optimal solutions are located near the boundaries for the practical problems. The infeasible solutions near the optimal solution help identify the optimal solution for these kinds of problems.
The infeasible sequences are in the inferior position without effective evolution during the evolution process because of the existence of penalty function. That can result in the decrease in population diversity so that the algorithm is easy to converge to local optimization.
Penalty factor is difficult to choose for penalty function. The algorithm is easy to converge to local optimum solution if the factor is too large, while the result may not be an optimal solution of the original problem if the factor is too small.
Considering the above-mentioned issues, a new discrete double-population FA is proposed based on the quantization of assembly feasibility constraints, which can fully incorporate the total values of feasible and infeasible populations and effectively guarantee the diversity of population during the search process of optimal solution. A population saves the individuals with feasible solutions and FA is used to search the optimal feasible solution step by step. Another population saves the individuals with infeasible solutions, and the best infeasible solutions (the individuals with best fitness values and minimum constraint violation) are constantly added into the feasible solution swarm during the FA iteration process. The mechanism can ensure corresponding evolution for the infeasible solution and guarantee the diversity of population, where it is not easy to fall into the local optimization. On the other hand, the evolution of infeasible solution enhances the search ability of the algorithm and improves its efficiency. Furthermore, discrete coding mode is used in the FA for considering the characteristics of ASP. Fitness function in the algorithm is established using three general objectives: assembly stability, assembly polymerization and change number of assembly direction.
This article is organized as follows. The basic principles of FA are summarized in the next section. The third section develops a double-population search mechanism based on the discussion of ASP constraints. In the fourth section, a new discrete double-population FA is proposed for the ASP problem. In the fifth section, an ASP case study is provided to illustrate the proposed algorithm. Conclusions are then presented in the final section.
Basic principles
Firefly itself has some biological flashing mechanisms, which can perceive the flashing intensities and frequencies of other fireflies within a certain range for determining the existence and attractiveness of the partners or prey. Yang 25 proposed the FA according to the characteristics of firefly. The algorithm consists of two important issues: light intensity and attractiveness. Firefly brightness is affected or determined by the fitness function of its location. Brightness indicates the quality of firefly location and determines the movement direction of firefly. Attractiveness is proportional to brightness, which determines the movement distance of the firefly. All fireflies move toward these individuals with higher brightness and attractiveness and the optimal solution can be achieved ultimately.
Definition 1
In the standard algorithm, the light intensity of firefly has a monotonous exponential relationship with the distance of another individual

where
Definition 2
The attractiveness of a firefly is proportional to the light intensity seen by the adjacent fireflies. The attractiveness of any individual can be defined as follows

where
Definition 3
When the firefly is attracted by another more attractive (relative higher light intensity) firefly, the update formula of its location is given as follows

where
The solution space of the standard FA belongs to the unconstrained and continuous real number domain, while the solution space of ASP belongs to the strong constrained and discrete integer domain. In order to make FA appropriate for solving the ASP problem, the following two issues need to be addressed: how to deal with the strong constraints and discreteness of ASP. A double-population search mechanism is used to deal with the strong constraint problem, where the constraints can be described by interference matrix and quantified by assembly direction set. ASP discreteness can be handled by coding firefly individual location and defining discrete operations of FA.
Double-population search mechanism
ASP constraints
ASP is a combinational optimization problem with strong constraints, of which the aim is to identify the feasible assembly sequence with the optimal fitness under satisfying a variety of constraints. For acquiring the optimal or suboptimal assembly sequence
Geometric feasibility of assembly sequence. Geometric feasibility is a strong constraint of assembly sequence. Assembly sequence is possible to be optimized only when it satisfies the geometry constraints.
Assembly sequence optimization. The fitness function of assembly sequence optimization is constituted by a series of indexes. Only when the sequence has an optimal fitness value, the feasible sequence is deemed as the optimal one.
Assembly geometric constraint is the geometric interference on a part due to the existence of another part during the assembly process. The violation of the assembly geometric constraints among the parts will inevitably result in the assembly interference so that the assembly cannot be completed. For facilitating the feasibility identification of the assembly sequence and the derivation of feasible assembly direction during the assembly process, the usual interference matrix of assembly
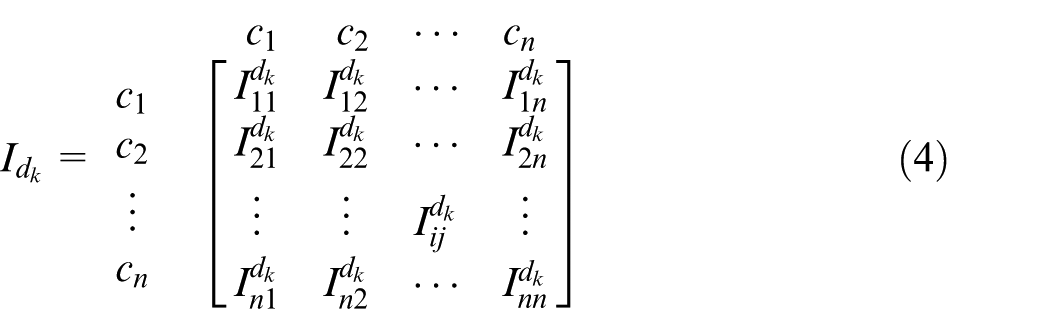
where n is the part number of an assembly;
Assembly directions are generally divided into six directions in the Cartesian coordinate system


Based on the definition, the part
Double-population search mechanism
The study proposes a new double-population cooperative search mechanism for solving the ASP problem. A population saves the individuals with feasible solutions and FA is used to search the optimal feasible solution step by step. Another population saves the individuals with infeasible solutions, and the best infeasible solutions (the individuals with best fitness values and minimum constraint violation) are constantly added into the feasible solution swarm during the FA iteration process. The mechanism can ensure corresponding evolution for the infeasible solution and guarantee the diversity of population, where it is not easy to fall into the local optimization. On the other hand, the evolution of infeasible solution enhances the search ability of the algorithm and improves its efficiency. The two populations are defined as follows.
Definition 4
Set
Definition 5
Set
The above two populations are saved assembly sequences which can be expressed as follows.
Definition 6
Set
In the iteration process in the FA algorithm, some appropriate individuals (i.e. assembly sequences) in the infeasible population should be chosen into the feasible population. The process is dependent on choice function which is defined as follows.
Definition 7
The appropriate individuals in infeasible population

where
The simple operation flow of the double-population search mechanism is given as follows:
Step 1. Define feasible population
Step 2. Implement an iteration operation for the individuals in
Step 3. Calculate choice function
Step 4. Judge whether the algorithm satisfies the stop conditions. If it is not satisfied, the algorithm goes to Step 2; otherwise, stop the algorithm and output the current optimal solution.
A new double-population FA
Besides solving the strong constraints in solution space, problem mapping mechanism and solution-generating mechanism must also be determined when using FA to solve the ASP problem. The operations of attractiveness and position in the standard FA are all real value calculation, which is suitable for solving the continuous problems. However, ASP belongs to the discrete problem. Related operations of the firefly individual location, attractiveness and location update must be redefined.
Discrete FA
FA is similar to PSO on the optimization principle. Location coding with related operations can be similarly defined using the PSO coding mode in the discrete sequencing space.23,24,26
1. The position of firefly i. Set ordered arrangement of all parts composed of the assembly as the firefly position vector. Position vector of the ith firefly individual can be expressed as follows

where
2. Subtraction of the positions. This is
3. Multiplication of the directions. This is
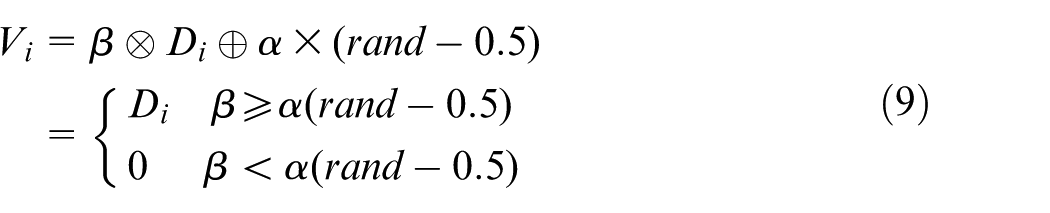
4. Addition of the location and velocity. This is the location update of firefly i in equation (3). The new location firefly i in the (t + 1)th iteration is identified by multiplying its location and the velocity vector (including the direction and movement distance) in the tth iteration

During the update process of firefly positions, if the kth element
Fitness function
Optimization objective of ASP is usually to save cost and improve the assembly quality. Three common objectives in the ASP field are used to establish the fitness function, which include assembly stability, assembly polymerization and change number of assembly direction:1,14,23
1.
Assembly stability. Assembly stability is that comprehensive ability of the assembled parts or sub assembly to maintain their internal assembly relationships under the action of gravity. Connection matrix
A principle can be given to judge whether the assembly relationship between part i and part j is stable. If i and j is stable connection (
2. Assembly polymerization. Assembly polymerization is the degree of integrated completion for assembly operations. Higher polymerization means higher assembly efficiency. The polymerization can be usually quantified using the change number of assembly tools. The change number can be identified using cumulative calculation by judging whether the assembly tool is the same for the two adjacent parts.
3. Change number of assembly direction. The decrease in change number can reduce the clamping times of the assembly or the number of reversing operations. This can save the assembly cost and improve the assembly efficiency. The change number can be quantified by using the above-mentioned feasible assembly direction set
Assume
The fitness function of the double-population FA can be identified by weighted summing of the three indexes

where
The discrete double-population FA process
The double-population FA process for ASP is shown in Figure 1. The specific steps are given as follows:
Step 1. Set the initial parameters of the double-population FA
The iteration variable The maximum iteration number T The initial population size N ( The FA parameters: light absorption coefficient Index weights of fitness function
Step 2. Initialize the feasible population
The feasibility of each individual (i.e. assembly sequence) can be judged using Definition 6, which is inserted into the corresponding populations The locations of
Step 3. Search in the feasible population A firefly moves to the firefly with smallest fitness within its vision scope. Its position is updated using equation (10) until each firefly accomplishes a movement, namely, an iteration operation is completed. New location fitness values of these individuals can be calculated using equation (11). Record the individual i with the optimal fitness and its fitness value The feasibility of new location is judged for each individual. If the new individuals are all feasible solutions, go to Step 5. If there are k infeasible solutions, these solutions are added into the infeasible population
Step 4. Calculate the choice function for the infeasible population
The choice function can be calculated using equation (7) for Other infeasible solutions remain until calculating their choice function for the next iteration.
Step 5. The FA is circularly implemented from Step 3 to Step 4 until the stop conditions. Output the optimal firefly individual b with its fitness F, as well as the optimal fitness and average fitness of each generation.
Step 6. Decode the optimal location of the outputted firefly and get the optimal assembly sequence.
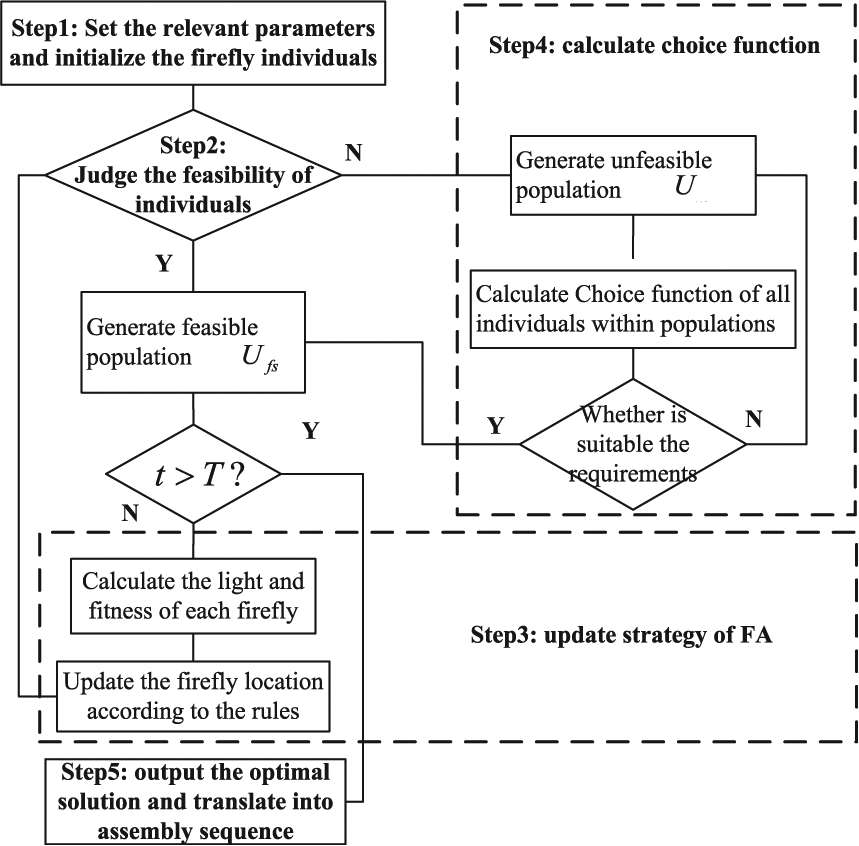
FA process using double population.
Case study
The proposed double-population FA is applied in a real-world ASP case of a manufacturing enterprise. The assembly explosion diagram is shown in Figure 2, which has 16 important parts after simplifying related standard parts. In particular, the accessories (e.g. fasteners) can be ignored in the planning process which does not have direct impacts on assembly sequence.
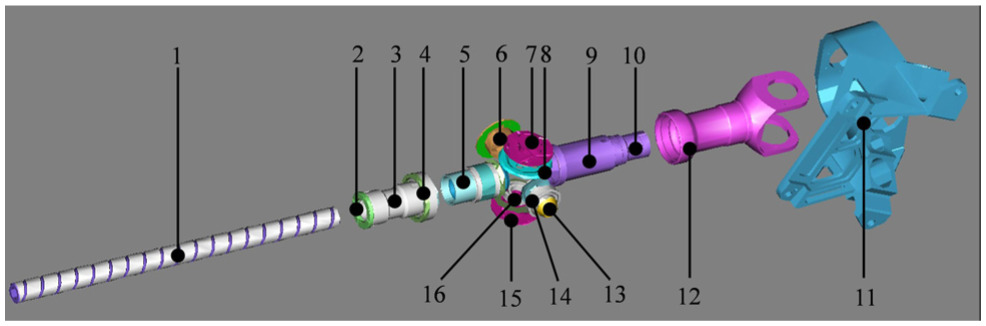
Assembly exploded diagram.
The 16 parts assemble along the coordinate axes
Assembly tools of the 16 parts.

Effects of population size on the FA
The FA uses cooperative search strategy of double populations including feasible population
1. Identify
Simulation results under different population sizes.

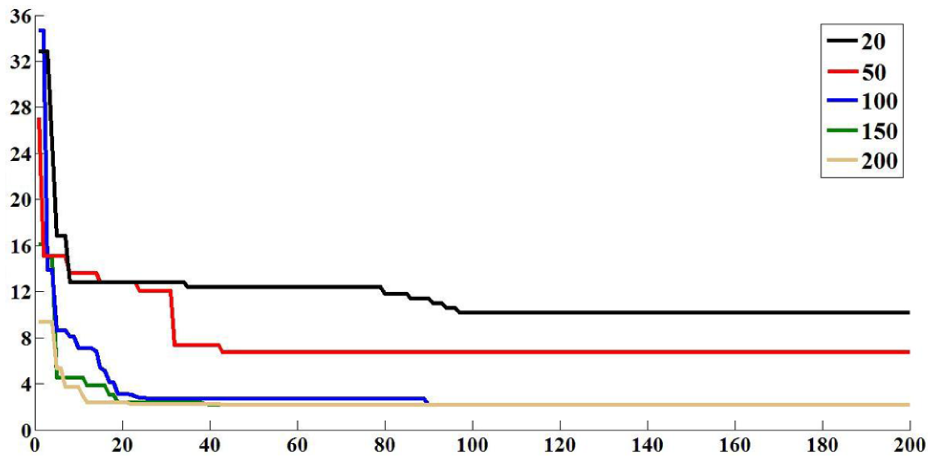
Average fitness of different population sizes under 20 operations.
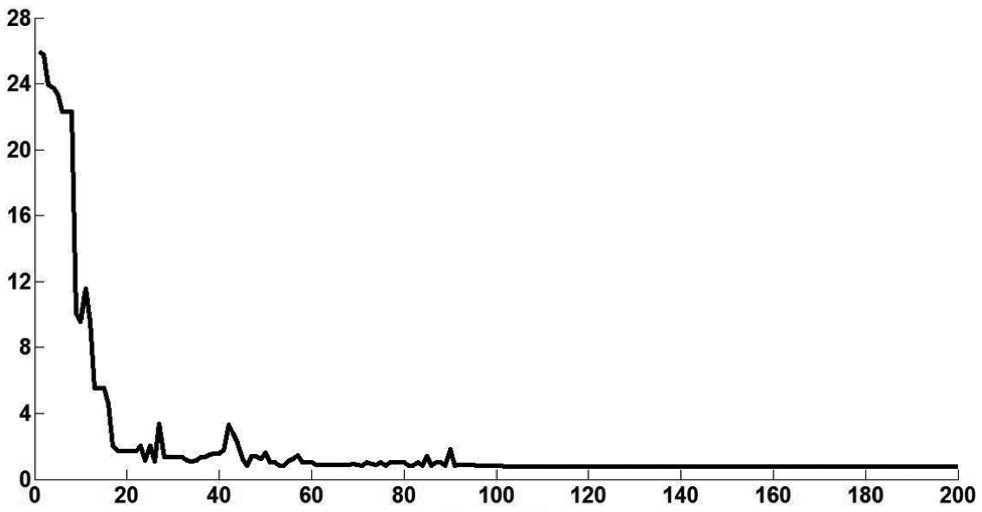
Seen from Table 2, the number of suboptimal sequences for the 20 running is in an upward trend, while a single execution time also increases with the increasing size of initial population. Seen from Figure 3, the identified optimal sequence is the local optimization when the population size is 20 or 50, while the fitness of optimal assembly sequence will be reduced accordingly when increasing the population size. The suboptimal assembly sequences increase, but the fitness of the optimal sequence is not changed when the population size increases from 100 to 200.
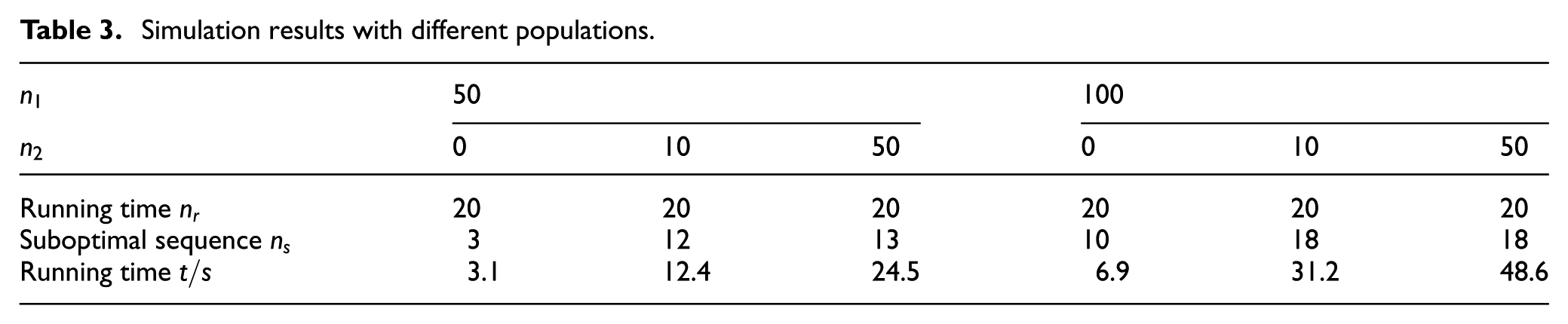
2. Identify
The effects of infeasible population
Simulation results with different populations.
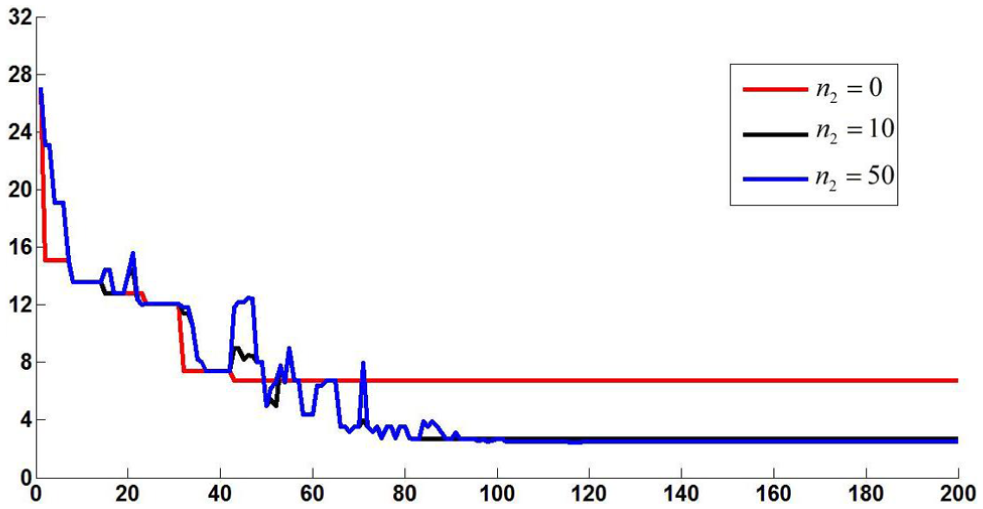
Simulation results under feasible population size n1 = 50.
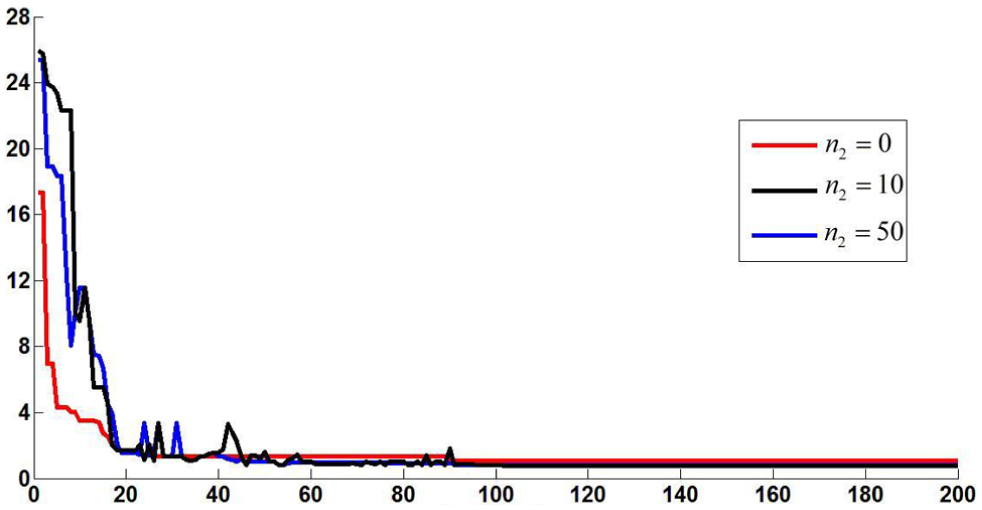
Simulation results under feasible population size n1 = 100.
Suboptimal sequences increase significantly and the fitness of algorithm convergence decreases significantly when adding
It is evident that the average fitness of each generation has a local wave phenomenon when adding
FA application
Set the feasible population size
Running results of the double-population FA.
The optimal assembly sequence.

The assembly sequence S = {11-12-10-9-16-14-13-15-8-6-7-5-3-4-2-1} is the optimal sequence using the double-population FA. It is found that the assembly sequence S satisfies geometric feasibility, where its assembly time is shortest and its assembly efficiency is highest through repeated trials in the workshop. Finally, the sequence is designated as the practical assembly sequence of these parts in process department for guiding the workshop manufacturing.
Conclusion
In the field of process planning, ASP is a combinational optimization problem, which comprises of various constraints. A new discrete double-population FA is developed to implement ASP, which can overcome the disadvantages of the penalty function present in the traditional swarm intelligent algorithms. An application case is used to show that the proposed FA converges effectively to reach its optimum solution.
The main functions are outlined below:
For standardized description of ASP, assembly constraints are described and quantified using an assembly interference matrix and an assembly direction set.
A double-population search mechanism (including feasible and infeasible populations) is proposed to deal with the strong constraints of ASP. This is crucial for avoiding the establishment of the penalty function.
For solving a problem pertaining to ASP, the discrete double-population FA is proposed. This is based on the redefinition of the coding mode and the operations of the standard FA.
The proposed FA is applied in a real-world ASP setting for the validation of its feasibility and performance. The optimal size combination of feasible and infeasible populations for initializing the FA is identified by comparing the different sizes of the two populations.
Further work would consider the improvement of the evolutionary strategy for the two populations to make the FA more efficient and stable to solve the ASP problem. Other evaluation indices will be added into the fitness function and the effects of different optimization methods will be considered in the ASP. Moreover, ASP of multiple assemblies of one product in different locations and adjacent constraints with other assemblies can be further explored.
Footnotes
Acknowledgements
The authors express their sincere appreciation to the anonymous referees for their helpful comments to improve the quality of the paper.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The project was supported by National Natural Science Foundation of China (Nos 51205242, 51205247, 51405281) and Shanghai Science and Technology Innovation Action Plan (No. 1311110 2900).